中海达数据后处理培训模板
中海达HIRTK常规操作流程 ppt课件

重复上面(二)的操作步 骤
C
A
B
中海达HIRTK常规操作流程
• 1、菜单【参数】-【坐标系统】--【参数计算】
点击 点击
中海达HIRTK常规操作流程
点击 点击
中海达HIRTK常规操作流程
点击 点击
中海达HIRTK常规操作流程
点击 点击
中海达HIRTK常规操作流程
点击 点击
中海达HIRTK常规操作流程
点击 点击
中海达HIRTK常规操作流程
点击
中海达HIRTK常规操作流程
点击 点击
中海达HIRTK常规操作流 • 1、打开GPS程主机电源,在GPS主机
的液晶面板上设置GPS接收机为(移 动站)模式
• 2、用蓝牙连接好移动台,将GPS天 线对中、整平。
中海达HIRTK常规操作流程
显示 显示
中海达(三H)I、R在TBK点架常好规GPS操, 作流程
点击 点击
点击
手簿连接电脑下载数据
将手簿用USB数据线连接电脑电脑上 • 出现下图对话框后,点“取消”:
中海达HIRTK常规操作流程
点击
中海达HIRTK常规操作流程
点击
出现下图对话框后,点击“NandFlash”
• 手簿主程序安装目录: \NandFlash\Hi-RTK。
• 数据导出目录为: \NandFlash\Project\Road\Unnamed\Points。
中海达HIRTK常规操作流程
GIS+手簿操作快速入门
中海达HIRTK常规操作流程
• 假设有一测区如下图,现只知两个点的本地坐标。 其坐标椭球为“北京-54”椭球,坐标系为自定义 坐标系,中央子午线为本测区中央子午线(114: 00),两点施工坐标分别为:(单位:米)
4.4 中海达HGO实训教材
4.4中海达HGO2.0HGO 是广州中海达卫星导航技术股份有限公司继HDS2003软件后,在十多年的后处理软件运用与用户体验改进的基础上推出的第二代静态解算软件,目前版本为HGO2.0.1。
中海达GNSS 解算软件HGO 数据处理软件包,专用于对静态采集的GNSS 数据进行系统处理,数据格式可以是中海达独有的*.ZHD,也可以处理RINEX 格式、*.SP3精密星历格式和南方*.GNS 格式。
此外,软件还提供了接收机管理、坐标转换、精密星历下载、RINEX 格式转换和文件合并等工具HGO 静态数据处理的一般步骤包括:1.新建项目,并设置坐标系统、限差;2.导入数据,并编辑文件,修改测站名和天线高等信息;3.基线解算与闭合差验算,并根据残差信息进行调整,直到基线质量合格;4.网平差,输入控制点信息后,完成自由网平差->84约束平差->当地三维约束平差或二维约束平差;5.导出各种解算报告。
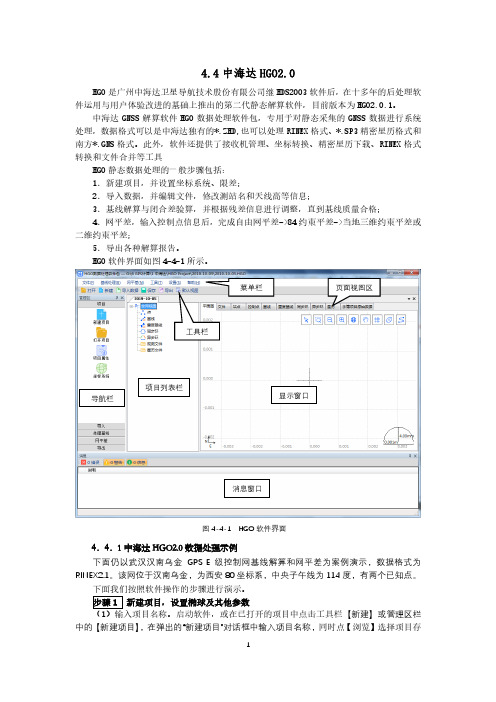
HGO 软件界面如图4-4-1所示。
4.4.1中海达HGO2.0数据处理示例下面仍以武汉汉南乌金GPS E 级控制网基线解算和网平差为案例演示,数据格式为RINEX2.1。
该网位于汉南乌金,为西安80坐标系,中央子午线为114度,有两个已知点。
下面我们按照软件操作的步骤进行演示。
步骤1 新建项目,设置椭球及其他参数(1)输入项目名称。
启动软件,或在已打开的项目中点击工具栏【新建】或管理区栏中的【新建项目】,在弹出的“新建项目”对话框中输入项目名称,同时点【浏览】选择项目存快捷工具菜单栏 工具栏导航栏 页面视图区项目列表栏显示窗口消息窗口图4-4-1 HGO 软件界面放的文件夹,“工作目录”中显示的是现有项目文件的路径,按【确定】完成新项目的创建工作,如图4-4-2所示。
(2)项目属性设置。
按确定后界面弹出“项目属性”对话框,如图4-4-3所示。
的基本信息和限差属性页中按图中填写或选择,高级属性页中的信息默认。
中海达RTK操作步骤培训

中海达RTK操作步骤培训一、系统组成二、系统设置1.基站接收机设置(1)将基站接收机连接到电源,并使用数据线连接到计算机(2)打开基站接收机的电源,通过计算机软件进行设置,包括设置观测参数、无线电参数、差分参数等。
(3)根据测量需求选择合适的观测星座和工作频率,确保系统在适应不同工作环境的情况下具有较高的灵活性。
(4)设置基站的位置参数,包括经纬度、高程等,以及设置与移动接收机之间的通信方式,如设置无线电频率和无线电工作模式。
2.移动接收机设置(1)将移动接收机连接到电源,并使用数据线连接到计算机。
(2)打开移动接收机的电源,通过计算机软件进行设置,包括设置观测参数、无线电参数、差分参数等。
(3)设置移动接收机的运行模式为RTK模式。
(4)设置RTK模式下的观测星座和工作频率,根据测量需求选择合适的参数。
(5)设置移动接收机的位置参数,包括经纬度、高程等。
三、差分数据收集1.基站数据收集(1)基站接收机通过计算机软件将接收到的星历和观测数据保存到内存卡或计算机硬盘中,以生成差分修正数据。
(2)根据测量需求选择差分数据的采集间隔,一般情况下可以设置为几秒钟至几分钟不等。
2.移动接收机数据收集(1)移动接收机通过计算机软件将接收到的星历和观测数据保存到内存卡或计算机硬盘中,并同时接收基站发送的差分修正数据。
(2)根据测量需求选择数据的采集间隔,一般情况下可以设置为几秒钟至几分钟不等。
四、数据处理1.基站数据处理(1)将基站接收机保存的观测数据和星历数据导入至计算机软件中。
(2)使用计算机软件对观测数据进行差分处理,生成差分修正数据。
2.移动接收机数据处理(1)将移动接收机保存的观测数据和星历数据导入至计算机软件中。
(2)使用计算机软件对观测数据进行相对定位计算,得到移动接收机的位置。
(3)通过接收基站发出的差分修正数据,对移动接收机的位置进行差分修正,得到高精度定位结果。
五、数据输出根据测量需求选择合适的数据输出方式,可以输出定位坐标、高程等信息。
中海达数据后处理培训模板(1)

式中:n——闭合环边数。
坐标系统及坐标转换----坐标系
大地坐标(B,L,H):以参考椭球作
为基准面,以起始子午面和合赤
道面作为在椭球面上确定某一
点投影位置的两个参考面
空间直角坐标(X,Y,Z):
椭球体中心O为原点,
起始子午面与赤道面交线
为X轴,赤道上与X轴正交的
X
方向为Y方向,椭球体的旋转
轴为Z轴,指向符合右手规则。
高斯投影六度带
6*N-3
自定义高斯投影
自定义
UTM –通用横轴莫卡托投影
墨卡托投影(等角正切圆柱投影)
投影参数
带号N,中央子午线Lo,投影面高程,
X加常数,Y加常数 K比例系数
平面坐标转换
平面坐标转换
– 多应用于北京54, 国家80与当地自 定义坐标系之间 的转换
– 四个参数 – X0平移 – Y0平移 – θ坐标轴旋转 – K 尺度
地图投影是将地球面上的经纬网描述到平面上的数学方法,使用地
图投影,可以将地球表面完整的表示在平面上,但是是通过对投影 范围内某一区域的均匀拉伸和对另外一区域内的均匀缩小实现的。
投影正算
投影反算
B L H ---------〉平面上 xyh 平面上xyh ----------〉B L H
坐标系统及坐标转换----投影
中海达数据后处理软件培训
培训内容
1相关概念 2布网规定 3数据检核规定 4坐标系统 5静态数据处理(实际操作)
相关概念
观测时段: 测站上开始记录卫星观测数据到记录停止 的时间间隔
同步观测:两台以上接收机同时对共同的卫星进行观 测
同步环观测:三台或以上接收机同步观测所获得基线 向量构成的闭合环
中海达GPS培训 CORS培训
参数计算
• 进入【3 参数】界面,然后点击左上角,选择【点校验】
• 点击【平滑】,等待10秒,右上角打钩
• 在已知点,输入坐标 • 点击【计算】 • 核对当前点坐标。误差在0.03以内即可,关闭界面,返回主界面
测量
• 点击主界面上的【5 测量】按钮,进入碎步测量界面
点放样
• 进入【5 测量】,点击左上角的碎部测量, 会看到点放样图标,点击进入点放样菜单 ,然后点击左下角的箭头,添加坐标即可 ,添加完毕后打钩,然后按照左下角的提 示行走即可。也可以把坐标从电脑提前导 入手簿,然后调用来放样
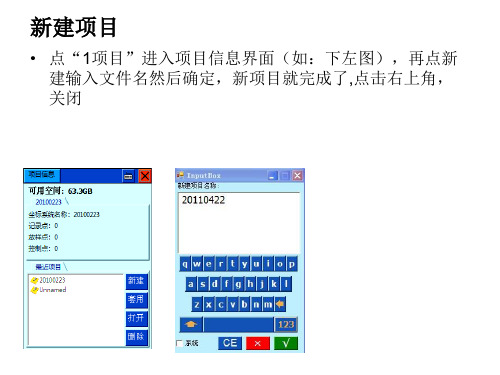
ห้องสมุดไป่ตู้新建项目
• 点“1项目”进入项目信息界面(如:下左图),再点新 建输入文件名然后确定,新项目就完成了,点击右上角, 关闭
连接GPS
• 点击“2.GPS”,再点击“连接GPS”,再点击连接,然后 选中对应机身号点“连接” • 机身叮咚一声后,连接成功
设置移动站
• 服务器:60.208.15.51或者60.208.15.52 源节点: NET_RTCM3_GG对应差分电文RTCM3 或者 NET_CMR_GG对应差分电文CMR
数据导出
• 点击碎部测量菜单左上角,点开记录点库,然后可以看到你自己测量 的点坐标,然后点击页面右下角图标 根据软件选择导出数据的格式,并在格式上面一行输入点库的名字
电脑端路径
• 移动设备/NandFlash/Project/Road/项目名 字/Point/点库名字
中海达RTK培训

中海达RTK 操作流程RTK仪器架设操作流程1.手簿主程序的打开双击手簿桌面的“HI-RTK Road”、“HI-RTK.exe”,打开手簿程序。
2.新建项目:通常情况,每做一个工程都需要新建一个项目。
a.点击【项目】→【新建】→输入项目名→【√】软件桌面项目信息b.点击左上角下拉菜单【坐标系统】设置坐标系统参数,(如下图)椭球投影“坐标系”:选择国家,输入坐标系统名称,格式为“国家--xxxx”,源椭球一般为WGS-84,目标椭球和已知点一致,如果目标坐标为自定义坐标系,则可以不更改此项选择,设置为默认值:“北京-54”。
“投影”:选择投影方法,输入投影参数。
(中国用户投影方法,一般选择“高斯自定义”,输入“中央子午线经度”,通常需要更改的只有中央子午线经度,中央子午线经度是指测区已知点的中央子午线;若自定义坐标系,则输入该测区的平均经度,经度误差一般要求小于30分。
地方经度可用GPS实时测出,手簿通过蓝牙先连上GPS,在【GPS】→【导航信息】中获得)。
“椭球转换”:无。
“平面转换”:无。
“高程拟合”:无。
“保存”:点击右上角的【保存】按钮,保存设置好的参数。
注:记得点击右上角的保存按钮,否则坐标系统参数设置无效。
3.GPS和基准站主机连接【GPS】→“左上角下拉菜单”→连接【GPS】,检查仪器型号、连接方式、端口、波特率,点击【连接】,点击【搜索】出现机号后,选择机号,点击【连接】,如果连接成功会在接收机信息窗口显示连接GPS的机号。
蓝牙连接注意事项:a.连接之前先在“配置”→“手簿选择”→选择手簿类型;(一般不要修改选择默认)b.手簿与GPS主机距离最好在10m内;c.选择串口连接时,周围30m内无第三个蓝牙设备开启(包括同类手簿、GPS主机都不能打开);d.如果连接不上,请重新启动接收机,或手簿程序。
连接GPS 蓝牙搜索4.设置基准站a.点击左上角下拉菜单,点击【基准站设置】。
b. 点击【平滑】,平滑完成后点击右上角【√】。
HGO软件处理数据(上)

测绘工程专业选修课程<控制网平差与程序设计> 软件应用-HGO GNSS数据处理软件辽宁科技大学土木工程学院测绘工程教研室一、软件简介中海达GNSS数据处理软件由卫星预报、野外动静态数据采集、数据传输、项目管理、静态基线处理、动态路线处理、闭合差搜索、网平差、成果输出、坐标系管理及坐标转换等模块组成。
HGO(Hi-Target Geomatics Office)软件全名“HGO数据处理软件包”,是中海达在十多年的后处理软件运用与用户体验改进的基础上继HDS2003软件后推出的第二代静态解算软件。
该软件用于高精度测量用户的基线数据处理,网平差,坐标转换。
软件的功能及特点包括:1.该软件设计支持GPS、Glonass、Compass多系统解算,支持静态,动态(走走停停,后处理RTK)等多种作业模式。
2.全新第二代基线处理引擎,能够解算超长时间的静态数据,并能智能剔除粗差数据,用户的基线处理变得前所未有的简单。
3.全新的网平差模块,能进行WGS84系统下约束平差、当地约束平差等工作。
4.全新的用户界面设计,与国际软件接轨。
5.配套完整的解决软件工具,包括全新的Rinex转换软件ConvertRinex、坐标转换软件CoordTool、精密星历下载软件SP3Gate等。
二、软件静态数据处理流程创建工程项目导入野外观测数据GNSS 基线处理对整网进行平差检查和打印成果三、典型算例1.数据来源数据为辽宁科技大学测绘工程专业09级《空间定位技术及应用》实验数据,于2011年11月7日采用中海达V30采集2个时段数据,数据格式为*.ZHD。
点名仪器高2.建立一个新的项目HGO数据处理软件是面向项目进行管理的。
因此,不管是进行单点定位,还是进行静态基线处理、动态路线处理,或者是进行网平差。
首先需要建立一个新的项目,或者打开一个已建立的项目。
建立一个新的项目可分如下几步:(1)首先建立新的项目,确定名称与保存路径;(2)输入项目属性,确定质量检查标准;(3)在坐标系统管理里输入参数。
中海达全站仪维修培训[1]
![中海达全站仪维修培训[1]](https://img.taocdn.com/s3/m/ffb31aa6b7360b4c2f3f6405.png)
使用工具: 0#十字螺丝刀 、 3mm内六角扳 手、镊子
1、参见右盖拆卸,将右盖从仪器上拆下;参
见显示屏组拆卸将显示屏组拆下,将显示隔
• 6.四个通道都调整完成后,点击保存设置按钮, 右侧的调试信息栏会显示调试结果信息。
中海达全站仪维修培训[1]
电子经纬仪
PPT文档演模板
中海达全站仪维修培训[1]
第三部分 补偿系统
常见问题
坐标测量误差大, 补偿器坏了!
PPT文档演模板
中海达全站仪维修培训[1]
更换步骤:
电子补偿器更换示意图及步骤
电刷组件,使用剪刀将电刷导线在根部剪断,将 电刷插主板端连线取下,将损坏电刷取下报废。 将留在整机中的导线使用剥线钳剥线,剥线长度 为0.5cm。 3、取新电刷,将电刷同侧导线剪断,剪断位置距电 刷3cm处,使用剥线钳剥线,剥线长度为0.5cm。 取热缩套管,将其剪成1cm长,两根。套入导线 中,将电刷导线与机器中剪断的导线颜色相同连 接,并用电烙铁将导线焊接牢固,焊点部位使用 2N力不能拉脱。 4、将热缩套管移置焊点处,使用热烘枪,将热缩套 管烘烤置完全紧缩在导线上。 5、使用0#十字螺丝刀,将固定电刷的螺钉旋入整机 中,电刷导线插入主板插座内。 6、参见主板安装,将主板和右盖板安装好。
PPT文档演模板
中海达全站仪维修培训[1]
内外切换位置检查及调整
步骤: 仪器:内外电机调整软件,通讯线,示波器 1、通讯线连接仪器,电脑端运行软件,打开串口,仪器按开机键开机,
状态栏显示连接成功。 2、连接示波器,调整限位套,将限位套调整到G0波形幅度最大。 3、调整内光路减光片,将G0波形峰值调整到1.8V,在调整内光路减光片,
• 3.如果底部相连,以100为单位减小“查看波形” 右侧时间输入框内的数值(数值要求1800- 3300),再次点击“查看波形”按钮观察波形。
中海达HDS2003静态数据后处理软件的操作

中海达GPS静态的使用HDS2003数据处理软件的解算:运行HDS2003数据处理软件1新建项目点【项目(F)】→【新建(N)…】,弹出 新建项目对话框,输入项目名确定,弹出项目 属性设置 对话框,在 项目细节 里填写好各项信息,点 控制网等级——选择自己的控制网等级,改好后点击确定。
再点【项目(F)】→【坐标系统(G)…】弹出 坐标系统 对话框,选择相应的坐标系。
2导入数据点【项目(F)】→【导入(I)…】,弹出 数据导入 对话框,数据格式选择第一个中海达ZHD观测数据弹出打开对话框选择需要解算的数据,点击打开,数据载入并在窗口中自动生成数据的网图。
3基线处理点【静态基线(S)】→【处理全部基线(A)】,软件开始自动处理全部基线,处理完后在 计算区 对话框里显示基线的精度,若有不合的则显示出不和基线的条数,在主界面的网图里,算合的基线显示为黑色,不合的基线显示为灰色。
点 主界面 下的列表,显示所有基线的观测时间、长度、精度等信息,若有不合的基线则在前面显示红色的叹号,Ratio 值小于3,整数解误差过大——达到厘米级或更大,是基线不合的主要原因(若不合的基线可有可无则可右键删除-把没用的基线删掉)。
处理不合基线的方法:我们可以通过选择不合的基线,点击 属性区 的 观测数据图观测数据图上面显示的是跟踪卫星的数据,下面的基线残差图,通过看基线残差图卫星的起伏周跳进行卫星的删除,然后重解基线来提高基线的精度,残差图中围绕中线起伏跳动小的卫星信号好,反之则不好,可尝试用鼠标框选 观测数据图上面的起伏跳动大的那颗星的数据既删除然后重解,再看基线的精度,起伏跳动大的星和某段时间内起伏跳动大的数据可以用鼠标框选进行删除,删除的方法是单击基线残差图左上角的下一个,找到要删除的卫星编号,再在观测数据图上面的卫星数据里面框选这颗星起伏大的那段即删除,然后重新解算。
如要恢复先选中再点鼠标右键恢复就可以了。
若还不合则右键→【选定基线处理设置(S)】,修改常用项里的数据采样间隔、截止角(采样间隔默认为60 秒、高度截止角默认为20度)[在数据量足够的情况下,采样间隔大些比较好]→【处理选定基线(O)】,进行不合基线的重新处理。
中海达GPS培训手册

静态控制测量【GPS布网等级】根据我国1992年所颁布的全球定位系统测量规范,GPS基线向量网被分成了人、B、C、D、E五个级别。
下图是我国全球定位系统测量规范中有关GPS网等级的有关内容。
GPS网的精度指标,通常是以网中相邻点之间的距离误差来表示的,其具体形式为:仃=+(bx£))2其中,°7:网中相邻点间的距离中误差(mm);靠:固定误差(mm);::比例误差(ppm[8]);::相邻点间的距离(加。
对于不同等级的GPS网,有下列的精度要求:A级网一般为区域或国家框架网、区域动力学网;B级网为国家大地控制网或地方框架网;C级网为地方控制网和工程控制网;D级网为工程控制网;E级网为测图网。
【GPS布网形式】1、点连式特点:点连式观测作业方式的优点是作业效率高,图形扩展迅速;它的缺点是图形强度低,如果连接点发生问题,将影响到后面的同步图形。
2、边连式特点:边连式观测作业方式具有较好的图形强度和较高的作业效率。
【选点原则】1、测站点开阔(15度以上)2、无电磁波干扰(离无线电发射台距离大于200米,离高压线距离大于50米)。
3、减弱多路径效应的影响(观测站附近不应有大面积的幕墙或对电磁波反映或吸收强烈的物体)。
4、观测站应选在交通方便的地方。
5、测点易保存。
【静态野外观测】1、对中整平GPS。
2、测量仪高(三个方面取平均值)。
3、开机观测。
4、做好观测记录。
(1)点名(不大于4位数,只能是数字或字母)。
(2)时段(同一点、同一天『北京时间第一天的8:00一第二天的8:00』观测N次就为N )。
(3)仪器高度(4)开机记录时间(在状态灯闪时开始记录)。
(5)关机记录时间(6)仪器号5、同步观测一段时间后关机搬站(注:是以晚开机时间为准,距离不能超过50公里)观测注意事项:・设置GPS采样间隔和高度截止角(同步的几台GPS要设置相同)。
・观测时使用对讲机,手提电话等无线设备与GPS距离大于10米。
中海达数据后处理培训模板

PPT文档演模板
• 注:如果用不同的GPS接收机进行联测,就要单独修改天线类型,对于没有
的天线类型,在GPS天线管理器里,添加相应的天线类型,并输入相应的天线参
数,如相位中心高,天线半径等。
中海达数据后处理培训模板
静态数据处理
5.基线的处理 数据检查没有问题之后,点击“静态基线” —— “ 处理全部基 线”,等基线全部处理完后,对于“Radio”值比较小的进行单独 处理,至少保证Radio值大于3以上,当然处理的越大约好,最大 为99.9,同时整数解误差越小越好
中海达数据后处理培训 模板
PPT文档演模板
2020/11/7
中海达数据后处理培训模板
培训内容
l 1相关概念 l 2布网规定 l 3数据检核规定 l 4坐标系统 l 5静态数据处理(实际操作)
PPT文档演模板
中海达数据后处理培训模板
相关概念
l 观测时段: 测站上开始记录卫星观测数据到记录停止 的时间间隔
7.成果检查-基线向量及改正数 、τ(Tau)检验
在“网平差”里点击“进行网平差”,就会弹出下图 窗口,点击“是”,查看平差报告。在计算区可以看 到基线向量及改正数 、τ(Tau)检验表个别有超限警告。 这说明要单独对这些基线进行处理,直到没有超限警 告。
PPT文档演模板
•直到没有超
限的地方
中海达数据后处理培训模板
静态数据处理
8.成果检查- χ平方检验 当基线被处理的超限的了,但χ平方检验(α=95%)还是“失败”, 这时把这个参考因子输入到网平差设置——自由网平差——协方 差比例系数里,然后再进行平差,直到“通过”。
PPT文档演模板
•X平方检验 未通过,对 最后精度影
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静态数据处理
1.任务的建立 打开电脑“开始—— 程序—— HDS2003数据处理软件”或者直接打开
桌面上的快捷方式。
点击项目, 新建项目
输入项 目名称
选择存储路径
静态数据处理
2.坐标系统的建立
新建任务时,虽然坐标系统已经选定,但可以对于中央子午线或 者是投影高等可能需要相应的改动或新建。点击“项目”——” 坐标系统“,如下图操作:
静态数据处理
5.基线的处理 数据检查没有问题之后,点击“静态基线” —— “ 处理全部基 线”,等基线全部处理完后,对于“Radio”值比较小的进行单独 处理,至少保证Radio值大于3以上,当然处理的越大约好,最大 为99.9,同时整数解误差越小越好
七个参数 – X0平移 Y0平移 Z0平移 – Xw旋转 Yw旋转 Zw旋转 – K 尺度
计算方法: – 3个以上公共坐标(BLH或者XYZ)
不同(椭球)坐标系的转换流程
1.三参数法: 七参数方法的简化,只取X平移,Y平移,Z平移。只能适用于坐标轴旋转很小
的两椭球间。大多运用于使用信标,SBAS差分等精度要求不高的工程。 2.布尔莎七参数法:
为基准面,以起始子午面和合赤
道面作为在椭球面上确定某一
点投影位置的两个参考面
空间直角坐标(X,Y,Z):
椭球体中心O为原点,
起始子午面与赤道面交线
为X轴,赤道上与X轴正交的
X
方向为Y方向,椭球体的旋转
轴为Z轴,指向符合右手规则。ຫໍສະໝຸດ 两种表现形式的 转换是严密的
Z
xz
L
y
P0B0,L0
O
B
Y
KP
Q
坐标系统及坐标转换----椭球体
高斯投影
高斯投影三度带
3*N
高斯投影六度带
6*N-3
自定义高斯投影
自定义
UTM –通用横轴莫卡托投影
墨卡托投影(等角正切圆柱投影)
投影参数
带号N,中央子午线Lo,投影面高程,
X加常数,Y加常数 K比例系数
平面坐标转换
平面坐标转换
– 多应用于北京54, 国家80与当地自 定义坐标系之间 的转换
– 四个参数 – X0平移 – Y0平移 – θ坐标轴旋转 – K 尺度
标准的七参数方法,使用X,Y,Z平移,X,Y,Z旋转,K尺度。作用范围较大 和距离较远,通常用于RTK模式或者RTD模式的WGS84到北京54和国家80的转 换,已知点要三个或三个以上。 3.一步法
参数形式和标准七参数一样, X,Y,Z平移,X,Y,Z旋转,K尺度 。可以一 步完成WGS84到当地地方坐标系统的转换工作。也是要三个或三个以上已知点。 4.四参数
投影正算
投影反算
B L H ---------〉平面上 xyh 平面上xyh ----------〉B L H
坐标系统及坐标转换----投影
TM投影-横轴莫卡托投影 (等角横切圆柱投影)
设想用一个圆柱横切于球面上投影带的中央经线,按照投影 带中央经线投影为直线且长度不变和赤道投影为直线的条件,将 中央经线两侧一定经差范围内的球面正形投影于圆柱面。然后将 圆柱面沿过南北极的母线剪开展平,即获高斯一克吕格投影平面。
数据检核规定
1.同一时段观测值的数据剔除率不宜大于10% 2.GPS网基线处理时,复测基线的长度较
ds≤2√2σ
其中σ为基线测量中误差
3
数据检核规定
3.GPS网外业处理结果,同步环各项闭合差应满足一下规定:
WX≤ √3/5 σ
WY≤ √3/5 σ
Wz≤ √3/5 σ
Ws≤ √3/5 σ
其中:n----闭合环边数。 σ-----基线中误差(mm)
在经典大地测量学中,为了便于观测成果的处 理和坐标传算,选择一个椭球面来作为计算的 参考面。
两个重要参数: a -椭球长半径 f -椭球扁率
坐标系统及坐标转换---高程系统
坐标系统及坐标转换----投影
地图投影是将地球面上的经纬网描述到平面上的数学方法,使用地
图投影,可以将地球表面完整的表示在平面上,但是是通过对投影 范围内某一区域的均匀拉伸和对另外一区域内的均匀缩小实现的。
使用x,y平移,a旋转,k尺度,也是RTK常用的一种作业模式,只转换平面坐标, 需两个或两个以上平面已知点。若需高程,则还要提供水准点高程进行高程拟合。
注意:各参数单位的不同,尤其是k值的不同。
静态数据处理
1.任务的建立 2.坐标系统的建立 3.数据的导入 4.数据检查 5.基线的处理 6.网平差 7.成果检查 8.成果提交
布网规定
GNSS网按相邻站点的平均距离和精度应划分为二、三、四等网 和一、二级网。二三四等网相邻点最小边长不宜小于平均边长的 1/2,最大边长不宜超过平均边长的2倍。一二级网最大边长可在 平均边长的基础上放宽一倍。当边长小于200m时,边长中误差 应小于征服2cm.
GNSS网的主要技术要求
“导入”,可以导入下图多种格式的数据
静态数据处理
4.数据检查 数据导入后,检查相应点的点名,仪器高,天线类型等等,
对于有问题的数据要及时更改
注:如果用不同的GPS接收机进行联测,就要单独修改天线类型,对于没有 的天线类型,在GPS天线管理器里,添加相应的天线类型,并输入相应的天线参 数,如相位中心高,天线半径等。
点击坐 标系统
新建
静态数据处理
2.坐标系统的建立
点击设置, 设置投影
设置好目 标椭球
选择投 影类型
设置中央 子午线
静态数据处理
2.坐标系统的建立
坐标系保存之后,点击项目---坐标系统----选择刚建立的坐标系
选择中国,然 后命名保存
选择坐标系, 点击确定
静态数据处理
3.数据导入 项目建完后,开始加载GPS数据观测文件。选择“文件”-
高程拟合方法
参数拟合法
a. 常数拟合 (少于3个已知点) b.平面拟合 (大于等于3个且分布较均匀的已知点) c.曲面拟合 (大于等于6个且分布较均匀的已知点)
网格拟合法
EGM96模型 似大地水准面精化成果
椭球转换
不同椭球(坐标系)的转换
– 多应用于WGS84 坐标与北京54, 国家80,当地坐标 之间的转换
WS= √ WX2+ WY2+ WZ2
数据检核规定
GNSS网外业基线预处理结果,其独立异步环或附合线路坐标闭 合差应符合下式:
WX≤2√nσ
WY≤2 √n σ
WZ≤2 √nσ
WS≤2 √3nσ
WS = √ WX2+ WY2+ WZ2
式中:n——闭合环边数。
坐标系统及坐标转换----坐标系
大地坐标(B,L,H):以参考椭球作