简易机器人的制作
手工机器人的制作方法

手工机器人的制作方法今天来聊聊怎么制作手工机器人。
这手工机器人做起来可有意思啦,既能锻炼动手能力,又能发挥咱的创造力。
需要一些硬纸板、剪刀、胶水、彩笔、小电机、电池、电线啥的。
硬纸板可以从快递盒子或者旧包装盒上找,剪刀要那种锋利点的,不然剪起来可费劲了。
胶水嘛,最好是那种粘性强的,能把纸板粘得牢牢的。
小电机可以在网上或者电子市场买到,电池就用普通的五号或者七号电池就行。
材料准备好了,咱就开始动手吧。
第一步,先设计一下你的机器人。
你可以在纸上画个草图,想想你的机器人长啥样,有啥功能。
是高大威猛的,还是小巧可爱的?是会走路的,还是会唱歌的?这全凭你自己的想象。
第二步,根据你的设计,用剪刀把硬纸板剪成各种形状。
比如,身体、脑袋、胳膊、腿啥的。
剪的时候要小心点,别把自己的手给剪了。
如果你的设计比较复杂,可以多剪几个不同形状的纸板,然后再组合起来。
第三步,把剪好的纸板用胶水粘起来。
这一步很关键哦,要粘得牢固一点,不然等会儿机器人散架了可就不好玩了。
可以先从身体部分开始粘,然后再粘脑袋、胳膊和腿。
粘的时候要注意角度和位置,让机器人看起来比较协调。
第四步,给机器人装饰一下。
用彩笔给机器人画上眼睛、嘴巴、衣服啥的,让它看起来更漂亮。
你还可以用一些小贴纸、小珠子啥的来装饰,让机器人更加独特。
第五步,安装电机和电池。
如果你的机器人要会动,那就需要安装一个小电机。
把电机用胶水或者螺丝固定在机器人的身体里,然后用电线把电机和电池连接起来。
注意正负极不要接反了哦,不然电机可不会转。
第六步,测试一下你的机器人。
把电池装上,看看电机能不能正常工作,机器人能不能动起来。
如果有问题,就检查一下线路和电机,看看是不是哪里没接好或者坏了。
如果你的机器人还想有其他功能,比如会唱歌、会发光啥的,你可以再加上一些小喇叭、小灯珠啥的。
不过这就需要你有更多的电子知识和动手能力了。
制作手工机器人是一件很有趣的事情。
你可以根据自己的喜好和创意,做出各种各样的机器人。
《简易机器人制作》课件

本课程将教你如何制作一个简易机器人,学习电路组装、机器人程序编写和 机械部件设计等技能。
概述
电路组装
学会设计和组装机器人所需 的电路,掌握电子元件的连 接和布线。
机器人程序编写
学习编写机器人的程序,让 机器人具备自主操作和执行 任务的能力。
机械部件设计
了解机械部件的设计原理, 如机器人的动力系统和运动 机构。
所需材料
Arduino板
直流电机
舵机
蓝牙模块
步骤
1
硬件搭建
设计电路图,进行电路组装和机械部件的设计。
2
软件编写
搭建IDE环境,编写程Βιβλιοθήκη 实现蓝牙通信和红外遥控。3
调试
对电路和程序进行调试,确保机器人正常运行。
结论
通过本课程,您将掌握制作简易机器人的基本知识和技能,成为一个机器人制作的高手。
机器人的制作方法

机器人的制作方法要制作一个机器人,首先需要明确机器人的功能和用途。
然后,根据这些需求,选择合适的材料和零部件进行制作。
下面,我将介绍一下制作机器人的基本步骤和方法。
首先,确定机器人的功能和用途。
机器人可以用于各种不同的场合,比如家庭助手、工业生产、科学研究等。
不同的功能和用途需要不同的设计和制作方法,所以首先要确定机器人的具体需求。
其次,选择合适的材料和零部件。
机器人的制作需要用到各种材料和零部件,比如金属、塑料、电子元件等。
根据机器人的功能和用途,选择合适的材料和零部件非常重要,这将直接影响到机器人的性能和稳定性。
然后,进行机器人的结构设计。
机器人的结构设计包括机械结构和电子结构两部分。
机械结构包括机器人的外形和各个零部件之间的连接方式,而电子结构则包括机器人的控制系统和传感器系统等。
结构设计需要考虑到机器人的稳定性、灵活性和可操作性,所以需要进行充分的设计和计划。
接下来,进行机器人的组装和调试。
根据结构设计,将各个零部件组装在一起,并进行调试和测试。
这个过程需要非常仔细和耐心,因为机器人的每个零部件都需要精确的安装和调整,才能确保机器人的正常运行。
最后,进行机器人的程序编写和控制。
根据机器人的功能和用途,编写相应的程序,并将程序加载到机器人的控制系统中。
然后,进行控制系统的调试和测试,确保机器人能够按照预期的方式进行工作。
总之,制作机器人是一个复杂而又有趣的过程。
通过以上的步骤和方法,我们可以按照需求制作出各种不同功能的机器人,这些机器人可以在各个领域发挥重要作用。
希望这些方法对你有所帮助,也期待看到更多有趣的机器人问世。
简易机器人制作
简易机器人制作
什么是机器人?机器人是一种新兴的技术,由电脑和其他机器组成,可以完成复杂的任务,如清扫地板、作为家庭助手或控制核电站等。
然而,这样的机器往往会昂贵,不是每个人都能负担购买。
有一种可能性可以让每个人都有机会使用机器人,它就是简易机器人制作。
简易机器人是一种便宜又有效的方式来制作机器人。
它可以使用可用的物料,如塑料块、电子器件和配件,来制作非常简单的机器人。
此外,还可以使用软件,如Scratch或Arduino,来控制机器人。
首先,我们需要准备好所需的物料和器件,根据机器人的功能来选择。
例如,如果要制作一个简单的清扫机器人,我们可以使用一个DC电机、一个滑轮组、两个卷筒组、几块电路板,以及一些电阻和
电容舵机。
其次,我们需要连接所有的组件,它们可以通过电脑来操作,我们也可以使用线来连接它们。
然后,我们可以使用控制软件来控制机器人,如Scratch或Arduino,以完成我们所需的任务。
最后,我们可以编写代码来让机器人完成指定的任务,例如,按下按钮就可以让机器人向前移动,按另一个按钮就可以让机器人向后移动。
通过这种方式,我们可以让机器人像自己操作一样灵活。
总而言之,简易机器人制作是一种非常有效的方式,使每个人都有机会使用机器人。
它可以让我们制作出不同功能的机器人,而且它便宜又容易操作。
如果你有兴趣,不妨试试制作简易机器人,体会一下它的乐趣。
幼儿园创意手工:简易机器人DIY教学案例
幼儿园创意手工:简易机器人DIY教学案例在幼儿园教育中,创意手工活动是一种非常重要的教学方式,可以培养幼儿的动手能力、想象力和创造力。
今天,我们将带领幼儿进行一个简易机器人DIY教学案例,通过这个活动,幼儿可以动手制作自己的机器人,从而培养他们的动手能力和创造力。
材料准备:1. 彩色纸、彩色毛线、剪刀、胶水、颜料2. 空纸箱、卫生纸芯、彩色胶带3. 固定用品:绳子、胶带、塑料杯、竹签步骤一:制作机器人的身体1. 将一个空纸箱剪成合适的大小,作为机器人的身体。
2. 用彩色胶带将纸箱包裹起来,让机器人的身体变得色彩丰富。
3. 在机器人身上添加一些小装饰,比如用彩色纸做的装饰图案,可以让机器人看起来更加可爱。
步骤二:制作机器人的头部1. 用一个卫生纸芯做机器人的头部,然后用颜料在上面画出可爱的表情。
2. 在头部四周粘上一些彩色毛线,让机器人的头部显得更加生动。
3. 将头部固定在机器人的身体上。
步骤三:制作机器人的四肢1. 利用剩下的空纸箱制作出机器人的四肢,可以做成机器人的手臂和腿部。
2. 在四肢上添加一些小装饰,比如用彩色胶带做的小蝴蝶结,让机器人的四肢更有趣味性。
步骤四:组装机器人1. 将机器人的头部和四肢都固定在身体上,这样一个简易机器人就制作完成了。
2. 可以利用一些固定用品,比如绳子、胶带、塑料杯、竹签等,让机器人的四肢可以活动起来,增加机器人的趣味性。
这个简易机器人DIY教学案例不仅可以锻炼幼儿的动手能力,还可以激发他们的想象力和创造力。
通过制作自己的机器人,幼儿们可以学习如何利用简单的材料做出有趣的作品,这对他们的全面发展是非常有益的。
从简易机器人DIY教学案例中,我们可以看到创意手工活动对于幼儿的教育意义。
通过动手制作,幼儿可以培养自己的动手能力和创造力,同时也可以激发他们对于新事物的好奇心。
希望在幼儿园教育中,能够更多地开展类似的创意手工活动,为幼儿的成长添上更多色彩。
通过这个案例,我们可以看到,创意手工活动对幼儿的教育有着非常重要的意义。
简易机器人制作方法
简易机器人制作方法
制作一个简易机器人的方法有多种,以下为一种简单的方法:
材料:
1. 一个空的饮料瓶
2. 两个小型电动振动马达
3. 两个小型齿轮
4. 一些线材
5. 一个电池盒
6. 一个开关
7. 一些纸板、胶带和胶水
步骤:
1. 首先将两个电动振动马达固定在饮料瓶的底部,以使它们平衡地旋转。
2. 使用胶带将齿轮固定在振动马达的轴上,并确保两个齿轮彼此咬合。
3. 在饮料瓶的一侧剪一个小口,将电池盒通过该口固定在饮料瓶上,并将电池连接到振动马达。
4. 在饮料瓶的另一侧剪一个小口,将开关通过该口固定在饮料瓶上,并将开关连接到电池和振动马达。
5. 制作机器人的身体部分,可以使用纸板制作一个简单的身体框架,然后用纸板制作头部和四肢,并使用胶水将它们固定在身体框架上。
6. 将头部部分固定在饮料瓶的顶部,并确保头部可以自由旋转。
7. 使用胶水将身体框架固定在饮料瓶的底部,以使机器人稳定地站立。
8. 根据需要,您可以为机器人设计和添加其他功能,例如眼睛、嘴巴等。
请注意,这只是一个简易机器人的基本制作方法,您可以根据自己的想法和兴趣进一步改进和定制机器人的功能和外观。
机器人的制作方法
机器人的制作方法机器人的制作方法机器人是指一种能够自动执行任务的机械装置,它可以根据预先设定的程序和指令,完成像人类一样的工作。
现如今,机器人已经广泛应用于生产、服务、医疗等领域,提高了工作效率和生活质量。
下面我将介绍一种制作机器人的方法。
首先,为了制作一个机器人,我们需要明确所需的功能和特点。
假设我们希望制作一个能够在家庭中执行简单的家务劳动的机器人。
这个机器人需要具备识别环境、抓取物体、清扫和擦拭等功能。
第一步,我们需要设计机器人的外观和结构。
机器人的外观可以根据个人的喜好和需求进行设计,但需要注意的是要考虑到机器人的功能和实用性。
结构的设计需要考虑机器人运动的稳定性和操作的便利性。
可以采用3D建模软件进行设计,并根据设计结果制作机器人的外壳和各种结构件。
第二步,我们需要选择合适的传感器和执行器。
传感器是机器人感知环境的重要部件,可以选择激光传感器、视觉传感器等。
执行器是机器人执行各种任务的关键部件,可以选择电机、气缸等。
根据机器人的功能需求,选择合适的传感器和执行器,并将其与机器人的结构进行连接。
第三步,我们需要编写机器人的控制程序。
机器人的控制程序是由一系列指令组成的,用于控制机器人的运动和执行各种任务。
可以使用编程语言如C++、Python等编写程序。
编写控制程序时,需要考虑机器人的运动规划和路径规划等问题,使得机器人能够准确地执行任务。
第四步,我们需要对机器人进行测试和调试。
测试和调试是机器人制作过程中非常重要的一步,它可以检测机器人的功能和性能,并根据测试结果对机器人进行修改和调整。
在测试和调试过程中,需要注意保持机器人的安全,避免发生意外。
最后,我们还可以对机器人进行优化和改进。
根据机器人实际使用情况和用户的反馈,对机器人的功能和性能进行优化和改进,使得机器人更加智能和高效。
通过以上步骤,我们可以成功制作出一个家庭助理机器人。
当然,这只是一个简单的例子,机器人的制作方法因不同的需求而有所不同。
机器人的制作方法

机器人的制作方法机器人制作是一个具有挑战性的过程,需要通过严格的设计和制作流程,并且需要掌握一定的电子、机械和编程知识。
下面我们将通过以下列表简单介绍机器人的制作方法:1. 设计机器人制作一款机器人的第一步是设计概念。
这里需要考虑机器人的形状、大小、重量、功能和部件布局等因素。
首先,需要根据机器人的应用场景确定机器人类型,例如是用来执行特定任务的工业机器人,还是使用个人娱乐或教育目的的家庭机器人。
然后,根据机器人类型的特征设计机器人外观和功能模块。
2. 焊接机器人身体下一步是利用金属材料(如铝合金)制作机器人身体。
一般情况下,将根据设计规格将要建立的框架制成数个零件,然后通过简单的工具和焊接技术将它们连接在一起形成机器人的身体。
3. 添加机械部件机器人制作过程中需要安装大量机械部件,例如电机、传感器、液压装置等。
这些部件在设计时需要预先计算好,然后在制作时安装到机器人身上。
4. 编写机器人控制程序机器人需要一个控制程序才能执行各种任务,这个控制程序需要编写。
控制程序需要根据机器人功能的要求,编写合适的算法并将其翻译成机器指令。
5. 测试和调整机器人在机器人制作终的阶段,需要对机器人进行严格的测试。
测试的方式有很多种,可以是通过人类控制机器人测试每个部件,也可以是通过自己执行一些任务来进行测试。
任何不正常的行为或问题需要纠正调整。
以上就是制作机器人的大致过程。
为了制作出最佳的机器人,您需要学习各种电子、机械和编程技术,这些技术比较有挑战性并且需要时间和耐心。
不过,如果您热情而且有决心,制作一款自己的机器人会是一个值得尝试的有趣项目。
用磁力片搭建机器人的步骤
用磁力片搭建机器人的步骤
用磁力片搭建机器人的步骤如下:
设计机器人:首先,我们需要设计机器人的形态和功能。
可以通过画图、建模软件或者简单的手工模型来设计机器人的外形和结构。
考虑机器人需要有哪些部分和功能,以及磁力片应该如何组合在一起。
组装身体结构:根据设计好的图纸或模型开始组装机器人的身体结构。
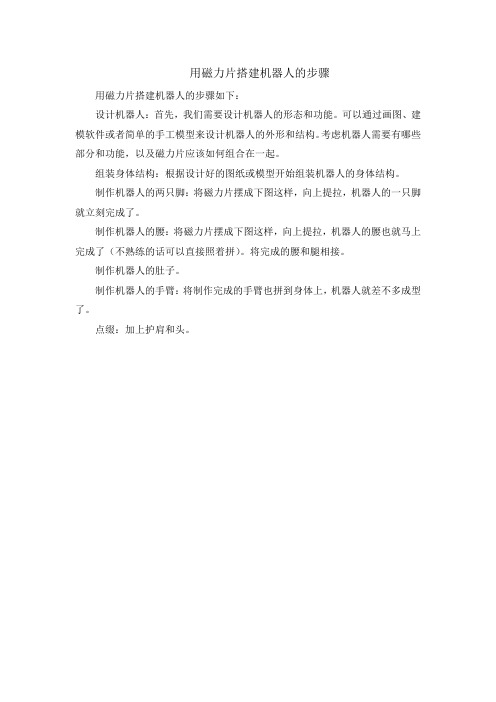
制作机器人的两只脚:将磁力片摆成下图这样,向上提拉,机器人的一只脚就立刻完成了。
制作机器人的腰:将磁力片摆成下图这样,向上提拉,机器人的腰也就马上完成了(不熟练的话可以直接照着拼)。
将完成的腰和腿相接。
制作机器人的肚子。
制作机器人的手臂:将制作完成的手臂也拼到身体上,机器人就差不多成型了。
点缀:加上护肩和头。
简易机器人制作教程ppt课件

亮点流动程序分析
ORG 0000H
START:MOV A,#11111110B ;
LOOP:MOV P1,A
ACALL DELAY ;调延时子程序
RL A
;A左移一位
SJMP LOOP;转回LOOP处再将A送P1口
DELAY::MOV R7,#80H
L1::MOV R6,#0FFH
L2::NOP
电导率的影响,但不适合测量海棉或棉 织物等吸音材料。
39
四、位置传感器
位置传感器既可以用来检测位移(角位 移和线位移)也可用于检测运动。在机 器人中应用较广,如手、脚的移动定位 等检测。
40
4.1 电位器式位置传感器
这是一种最简单的位置传感器,有旋转式的也 有直线式。它们拥有以下特点:
1、性能稳定、结构简单、精度较高。 2、输出信号范围可以选择。 3、输入输出特性可以是线性的也可以是其它
功能
工作电源引脚 I/O口线P1.7 I/O口线P1.6 I/O口线P1.5 I/O口线P1.4 I/O口线P1.3 I/O口线P1.2 I/O口线P1.1 I/O口线P1.0 I/O口线P3.7
17
最小系统应用实例
18
(6) 单片机的软件
机器语言、汇编语言、高级语言 机器语言是CPU能够直接识别并执行的最底层的语言,
35
光敏二极管特性
红外光敏二极管在无光照时其反向电阻 为无穷大,正向电阻大约为10K;有光照 时,反向电阻随光照强度增加而减小, 阻值可达几K或1K以下。
无反压时,正向电压与光照强度成比例, 一般可达0.2~0.4V。
应用电路:
36
三、超声波传感器
由发射和接受两大部分组成,除了电路, 主要器件是超声换能器,其基本原理是 基于压电效应。发射与接受往往使用同 一个探头。
幼儿园科技乐园:亲子DIY简易机器人制作

幼儿园科技乐园:亲子DIY简易机器人制作一、引言幼儿园科技教育在现代教育理念中占据着重要地位,而亲子DIY简易机器人制作作为一种新颖有趣的科技活动,正逐渐受到家长和老师们的重视。
本文将介绍亲子DIY简易机器人制作的相关知识,并指导家长和教师如何与幼儿一同参与其中。
二、了解机器人在开始制作之前,我们需要让幼儿了解什么是机器人。
机器人是一种能够根据预先设定程序执行任务的机械人,它可以代替人类从事重复性、危险性或繁琐性的工作,是现代科技发展中的重要产物。
三、准备材料制作简易机器人需要以下材料:纸杯、铅笔、电池、电动机、彩色建筑积木、胶水、以及一些彩色线和小装饰物。
这些材料可以在日常生活中轻松取得,让孩子们在制作机器人的过程中感受科技的乐趣。
四、动手制作1. 让孩子们在纸杯上画出一个可爱的笑脸,这样机器人就有了生动的外表。
2. 将电动机固定在纸杯底部,用彩色线连接电池和电动机。
这样,机器人就具备了动力来源。
3. 接下来,家长和教师可以帮助孩子们用彩色积木拼装出机器人的身体,让孩子们动手拼搭,培养他们的创造力和操作能力。
4. 家长和教师可以引导孩子们在机器人身上粘贴一些小装饰物,如纸贴、小铃铛等,让孩子们可以发挥自己的想象和创意。
五、亲子互动在制作机器人的过程中,家长和教师们可以和孩子们一同讨论机器人的原理、功能和应用领域,引导他们对科技产生兴趣。
家长和教师也可以与孩子们一起进行简单的实验,观察机器人的动作和变化,让幼儿从实践中获得科技的乐趣。
六、总结回顾通过亲子DIY简易机器人制作,幼儿在参与制作的过程中不仅能够培养动手能力和创造力,还能够理解机器人的基本原理,增强对科技的兴趣。
通过家长和教师的引导,孩子们可以在制作过程中获得乐趣,并且学到新知识。
七、个人观点我认为亲子DIY简易机器人制作是一项非常有价值的科技活动,它能够让幼儿在玩耍的同时学到知识,培养动手能力和团队合作意识。
家长和教师的引导不仅可以增强孩子对科技的兴趣,还可以增进亲子之间的情感交流。
小学生的机器人制作
小学生机器人制作指南大家好!今天我要和大家分享的是如何制作一个简单的小学生机器人。
制作机器人可以帮助我们了解科学原理,培养动手能力和创造力。
下面是一个简单的机器人制作流程,希望能给大家带来启发。
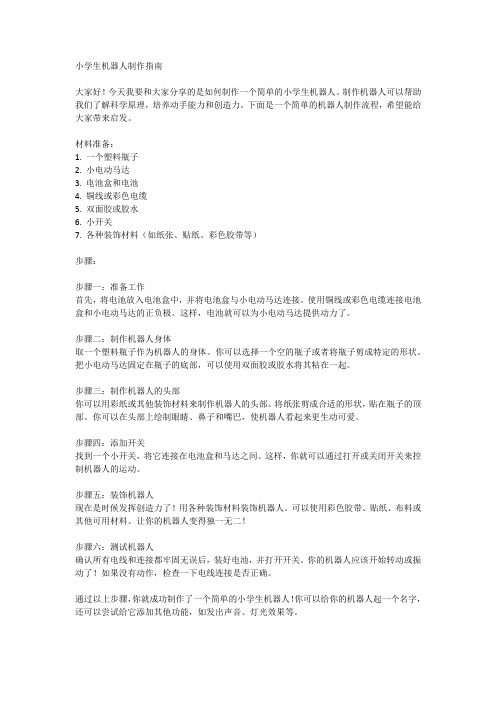
材料准备:1. 一个塑料瓶子2. 小电动马达3. 电池盒和电池4. 铜线或彩色电缆5. 双面胶或胶水6. 小开关7. 各种装饰材料(如纸张、贴纸、彩色胶带等)步骤:步骤一:准备工作首先,将电池放入电池盒中,并将电池盒与小电动马达连接。
使用铜线或彩色电缆连接电池盒和小电动马达的正负极。
这样,电池就可以为小电动马达提供动力了。
步骤二:制作机器人身体取一个塑料瓶子作为机器人的身体。
你可以选择一个空的瓶子或者将瓶子剪成特定的形状。
把小电动马达固定在瓶子的底部,可以使用双面胶或胶水将其粘在一起。
步骤三:制作机器人的头部你可以用彩纸或其他装饰材料来制作机器人的头部。
将纸张剪成合适的形状,贴在瓶子的顶部。
你可以在头部上绘制眼睛、鼻子和嘴巴,使机器人看起来更生动可爱。
步骤四:添加开关找到一个小开关,将它连接在电池盒和马达之间。
这样,你就可以通过打开或关闭开关来控制机器人的运动。
步骤五:装饰机器人现在是时候发挥创造力了!用各种装饰材料装饰机器人。
可以使用彩色胶带、贴纸、布料或其他可用材料。
让你的机器人变得独一无二!步骤六:测试机器人确认所有电线和连接都牢固无误后,装好电池,并打开开关。
你的机器人应该开始转动或振动了!如果没有动作,检查一下电线连接是否正确。
通过以上步骤,你就成功制作了一个简单的小学生机器人!你可以给你的机器人起一个名字,还可以尝试给它添加其他功能,如发出声音、灯光效果等。
制作机器人可以培养我们的创造力和动手能力,同时也让我们更好地了解科学原理。
希望这个小小的机器人能陪伴你度过愉快的时光,并激发你对科学和技术的兴趣!祝大家制作成功,谢谢!。
如何制作一个最简单的机器人

第一步:准备材料首先我们要准备所有可能用到的零件。
-AA电池盒->用来装电池-焊锡丝->用来焊接-绝缘导线->连接电池与电机-2节AA电池->驱动电机-2个1.5V电机(最好规格相同)->驱动机器人-一个拨动开关->作为机器人的开关-2个碰撞开关-1到2个回形针->用来延长碰撞开关的触须-胶棒->固定第二步:准备工具线钳->用来剪线和剥线皮尖嘴钳->用来弯曲回形针热胶枪->配合胶棒来把碰撞开关和拨动开关固定在电池盒上电烙铁->焊接万用表->检查电池第三步:正式开始首先检查电池电量,用万用表测量电池电压,如果电池电压接近1.5V,可以使用,否则最好购买新电池第四步:连线用电烙铁和焊锡丝将几根导线焊接到电池盒上。
最好注意一下导线的颜色,正极接出来的线用红色,负极接出来的线用黑色。
第五步:固定碰撞开关用热熔胶将碰撞开关固定在电池盒上。
第六步:加工触须(1)用钳子将回形针拉直。
第七步:加工触须(2)将拉直的回形针剪断,得到两根长度合适的铁丝。
(你也可以用一个回形针来制作一根触须,一切由你自己选择)第八步:加工触须(3)利用尖嘴钳将两根铁丝弯曲成图中的形状。
尽量让两根铁丝形状一样,你可以将两根铁丝一起湾,这样可以保证形状的一致。
第九步:加工触须(4)用热熔胶将两根触须固定到碰撞开关的触臂上。
第十步:电机将电机用热熔胶粘在电池盒上,保证电机与电池盒成大概40度的夹角。
第十一步:轮子找一个全向轮,用热熔胶将它粘在电池盒的末端,和两个电机形成一个三点支撑,注意全向轮要比电池盒稍微低一些,这样电池盒就不会触到地,机器人行走起来会更加的平稳和快速。
第十二步:另外一些需要的导线具体的接线方式可以参考我后面给出的原理图第十三步:装饰这一步,根据个人的喜好和条件尽情的发挥吧!我还在电机的旋转轴上缠了一些胶带,这样行走起来更平稳。
第十四步:电路原理图当机器人的一边撞到障碍物上时,左边或右边的碰撞开关闭合,导致右边或左边的电机反转,从而使机器人避开障碍物。
简单的行走机器人制作.pdf

简单的四足行走机器人简介:我当初的设计目标是在十分钟之内就可以制作出的四足行走机器人。
而最终我在这个机器人上花费了几乎三个小时,可以说我的最初目标并没有达成,不过我想如果我再次动手制作一个相同的机器人的话,我是可以在十分钟内搞定的。
第一步:零件清单你需要:两个伺服电机一个电话听筒能装四节AA电池的电池盒一个双刀双掷开关两张废CD光盘两个15cm长的螺栓两个13cm长螺栓一些其他小的螺栓螺帽一些扎带第二步:拆开听筒拆掉电话听筒两端的封盖,拆除里面的麦克风与听筒。
第三步:钻孔按照图中所示在电话听筒的两端各钻四个孔。
四个孔的位置应正好在一个正方形的四个角上。
第四步:第一个电机先从听筒较高的那一侧开始,先把伺服电机的线穿过整个听筒,从较低的那一端引出。
线穿好后将电机塞入听筒,伺服电机的十字臂应如图所示固定在听筒的内侧。
第五步:第二个电机将第二个电机同样塞入听筒的另一端,同样保证电机的十字架指向听筒的内侧,将两个电机的四条连接线全部从听筒的一端引出备用。
安装好后用扎带将两个伺服电机固定好,最后将扎带的多余部分剪掉。
第六步开关如图所示将双刀双掷开关固定在听筒上,利用听筒上的凸缘和扎带来固定开关。
第七步模板在电脑上设计好轮子的大小,固定孔的位置,然后将设计图纸打印出来,用剪刀剪下。
第八步:处理CD将打印出来的模板贴在废旧CD上。
先钻出两个最大的孔,然后再钻出中间的四个小孔。
另外一张CD上需要一个外围的缺口,使用剪刀小心的一点点沿着模板上的线剪出这个缺口。
第九步电池盒在听筒的中部钻出两个合适的孔,使用两组螺栓螺帽将电池盒固定在听筒上。
第十步连线将电池盒上引出的两根电源线(一红一黑)焊接到双刀双掷开关的中间两个引出端。
将两根短线(一红一黑)以X交叉的形式连接双刀双掷开关对角的两个引出端。
将电机1的红线与电机2的黑线连接在一起,电机1的黑线与电机2的红线连接在一起。
最后,将两对线焊接在双刀双掷开关底部的两个引出端上。
手工机器人简单的做法

手工机器人简单的做法
手工机器人的制作步骤如下:
1. 准备材料:需要的材料包括硬纸板、塑料瓶、彩色纸张、电路线、电动机、电池盒、开关、LED灯等。
2. 制作机器人的身体:用硬纸板剪切出机器人的身体形状,根据自己喜好可以设计成人形、动物形等。
将身体两侧留出的开口处粘贴好,作为放电路线和电池盒的位置。
3. 制作机器人的头部:利用硬纸板制作机器人的头部形状,可以根据自己的创意设计机器人的表情。
将电动机固定在头部的一侧,与头部连接。
4. 安装电路:将电路线连接到电动机和电池盒上,并根据需要连接LED灯等电子元件。
5. 安装开关:将开关安装在机器人的身体侧面或头部的一侧,这样可以方便控制机器人的开关。
6. 装饰机器人:用彩色纸张等材料为机器人增添装饰,可以给机器人画上眼睛、嘴巴等表情,也可以用纸做出机器人的服装。
7. 完成:经过上述步骤,手工机器人制作完成。
按下开关,机器人就会开始运转了。
注意:制作过程中要注意安全,使用电路时遵守相关电气安全知识,避免触电等意外。
科技四年级学习简单的机器人制作与控制
科技四年级学习简单的机器人制作与控制科技是现代社会发展的重要推动力之一。
机器人作为科技领域的重要组成部分,正逐渐走进人们的生活。
那么,在科技四年级学习中,学生可以开始接触简单的机器人制作与控制。
通过这个过程,他们可以培养创造力、动手能力和解决问题的能力。
在本文中,我们将介绍一些适合四年级学生学习的简单机器人项目,并提供制作与控制的基本方法。
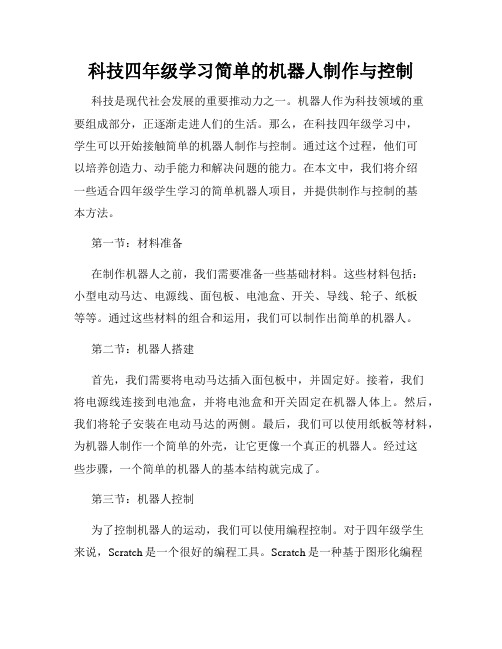
第一节:材料准备在制作机器人之前,我们需要准备一些基础材料。
这些材料包括:小型电动马达、电源线、面包板、电池盒、开关、导线、轮子、纸板等等。
通过这些材料的组合和运用,我们可以制作出简单的机器人。
第二节:机器人搭建首先,我们需要将电动马达插入面包板中,并固定好。
接着,我们将电源线连接到电池盒,并将电池盒和开关固定在机器人体上。
然后,我们将轮子安装在电动马达的两侧。
最后,我们可以使用纸板等材料,为机器人制作一个简单的外壳,让它更像一个真正的机器人。
经过这些步骤,一个简单的机器人的基本结构就完成了。
第三节:机器人控制为了控制机器人的运动,我们可以使用编程控制。
对于四年级学生来说,Scratch是一个很好的编程工具。
Scratch是一种基于图形化编程的工具,非常适合初学者学习编程。
通过将编程块拖拽到编程界面上,并设置不同的参数,我们可以实现对机器人的简单控制。
第四节:编写控制程序在使用Scratch编写控制程序之前,我们需要了解一些基本的编程概念,比如循环、条件、传感器等。
通过将这些概念应用到机器人的控制中,我们可以实现一些有趣的功能。
例如,我们可以编写一个程序让机器人按照指定的路径移动,或者根据遇到的障碍物进行相应的反应。
第五节:学习进阶一旦掌握了基本的机器人制作和控制,学生们可以开始尝试更复杂的项目。
例如,他们可以通过添加传感器,使机器人能够感知环境并做出相应的反应。
此外,他们还可以学习如何使用不同的编程工具来编写更高级的控制程序。
这些进阶的学习将进一步培养学生的创造力和解决问题的能力。
小小发明家制作简单机械
小小发明家制作简单机械作为小小发明家,我们可以通过动手制作一些简单的机械装置来锻炼我们的想象力和动手能力。
这些简单的机械装置不仅能够让我们了解机械原理,还能培养我们的创造力和解决问题的能力。
在本文中,我们将介绍一些适合小小发明家制作的简单机械装置,并给出制作步骤和注意事项。
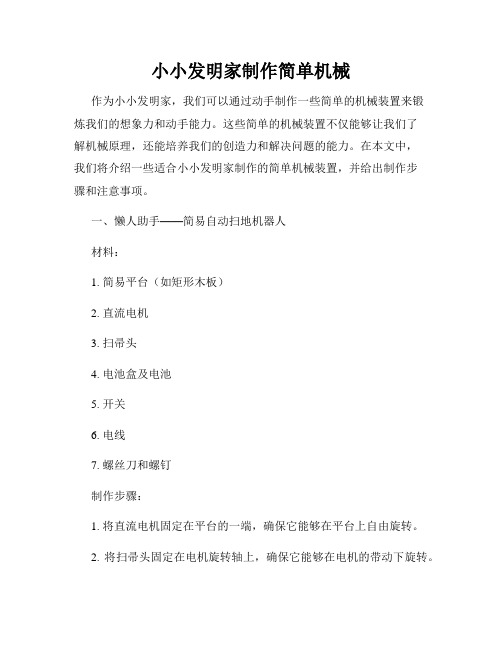
一、懒人助手——简易自动扫地机器人材料:1. 简易平台(如矩形木板)2. 直流电机3. 扫帚头4. 电池盒及电池5. 开关6. 电线7. 螺丝刀和螺钉制作步骤:1. 将直流电机固定在平台的一端,确保它能够在平台上自由旋转。
2. 将扫帚头固定在电机旋转轴上,确保它能够在电机的带动下旋转。
3. 在平台上固定好电池盒、开关和电线,将电机与电池盒通过电线连接起来。
4. 测试机器人的功能,确保电机能够正常运转。
5. 打开开关,观察机器人的扫地效果。
注意事项:1. 确保使用电池时,电极间的电压与电池的电压要匹配。
2. 在操作电线时要小心,避免触电事故发生。
3. 在使用机器人时,应确保平台底部没有明显障碍物,以确保其正常运作。
二、水力助推器——简易自制飞机材料:1. 饮料瓶2. 短粗吸管3. 彩色纸张4. 胶带5. 剪刀6. 彩笔或色彩笔制作步骤:1. 将饮料瓶从中间剪开,形成一个船形平台。
2. 在瓶子的后部贴上一张适当大小的纸,作为机翼。
3. 在瓶子的前部贴上另一张适当大小的纸,作为机身。
4. 在机翼的末端,固定短粗吸管作为喷射管。
5. 创造一种装饰飞机的方法,如绘制飞机外观或贴上彩色纸张,以使其更加美观。
6. 将胶带用于巩固,确保构造稳固。
7. 在室外空旷的地方,利用喷射管中的水力助推,将飞机推出手中。
注意事项:1. 在使用喷射管时,应尽量避免将水喷向他人或物体,以免发生意外。
2. 在室外使用飞机时,应选择安全无人的场所,以防止对他人或物体造成伤害。
三、简易牛顿摆材料:1. 细绳2. 小球3. 钉子或固定点4. 修改器制作步骤:1. 将细绳绑在固定点上,确保绳子不易松动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
忻州师范学院附属外国语中学 郑永成
机器人的定义
日本科学家的定义:机器人是一种具有 移动性、个体性、智能性、通用型、半机 械半人性、自动型、奴隶性等7个特征的柔 性及其。 法国科学家的定义:设计能根据传感器 信息实现预先规划好的作业系统,并以此 系统的使用方法为研究对象。
机器人的定义
我国科学家的定义:是一种自动化的及其,所不同的是 这种及其具有一些与人或生物相似的智能能力,如感知能力、 规划能力、动作能力和协同能力,是一种具有高度灵活性的 自动化机器。
单片机的特点
单片机的程序可反复修改,应用灵活。 单片机体积小,它可装嵌在各种设备、仪器仪表、家用电器和玩 具当中,并通过程序的控制,大大简化硬件电路,使产品体积更小、 成本更低、性能更优。
单片机价格便宜、功耗低、抗干扰能力强等特点。
知识窗
几种常用的单片机的系列型号简介
单片机产片系列型号众多,在我国应用较为广泛的有英 特尔(Intel)公司的MCS51系列单片机。它的系列型号有: 8031 8032 8051 8052 8751 8752等。其中8031/8032 内部不带程序储存器,使用时只能在外部扩展。8051/8052 内部带定制型程序储存器,用户无法修改。8751/8752内部 带光可擦程序储存器,用户可多次修改程序。目前许多公司 生产了与MCS51系列兼容并各具特色的单片机,使该系列 单片机应用更为广泛,价格更低。如:爱特梅尔(Atmel) 公司的AT89C系列单片机全部采用Flash存储器。
一、中央处理器
中央处理器CPU
运算器
控制器
寄存器
二、存储器
人是靠大脑的记忆细胞将我们所看到的、听到的信息 “存储”起来的。存储器就是单片机的记忆细胞。存储器 就像一个大仓库,仓库有一个一个的储物柜,每一个存储 单元可存放一个字节(Byte)的数据(8位二进制数)。 每一个存储单元对应一个地址编码,CPU对存储器进行存 取就像邮递员送信一样,凭着地址就能找到某一个存储单 元。 计算机的存储器有两大类:一类是可随时读写的随机存储 器RAM;另一类是只读存储器。
相同点:机器人是一种有人设计、制造出来的机器,这 种机器具有一些与人或某些生物相似的智能能力。
机器人的应用
目前全世界拥有各种机器人约100万台。他们代替人 完成了很多人类难以现的工作。如火星机器人、深海机 器人等。
机器人的应用
简易机器人
单片机及其软件 控制部分 传感器
外围电路
简易机器人 动力 机械部分
三、输入/输出接口
输入/输出接口(Input/Output 简称 I/O)接口是单片机的 重要组成部件,单片机与外部的交流就是通过I/ O接口来 进行的。通过输入接口,单片机可采集它需要的信息;通 过输出接口单片机可输出控制信号去控制外部设备。
例如:足球机器人中的单片机通过输入接口采集到光电传 感器的信息,知道足球所在的位置后,它就通过输出接口, 控制机器人向足球扑去;抢到足球后它又通过输入接口和 传感器寻找对方球门并通过输出接口控制机器人攻门。
传动
执行
简易及其人的结构示意图
第一章 简易机器人的控制核心-----单片机
第一节 单片机的基础知识
一、什么是单片机
放学路上,小华跟小军说:“我家昨天买了一 台新电脑”。“呦!CPU是什么型号的?”“奔腾 四”,“内存多大?”,“256兆”,“啊!太好 了,运行起来一定很快!”“是啊。”。。。。。。
第二节 单片机内部的基本结构
时钟 OSC
程序存储器 ROM
数据存储器 RAM
中央处理器 CPU
内部总线
BUS
输入/输出接口 I/O
定时/计数器 CTC
一、中央处理器
中央处理器(CPU)是单片机的大脑。
CPU主要是由控制器、运算器、和各种寄存器组成。
控制器是一个指挥中心。单片机通电后,控制器就从程序 存储器取出第一条指令,按指令要求指挥其他部件完成相 应任务。接着取下一条指令......单片机就是在控制器的控 制下,一步一步地完成所赋予的任务。 运算器相当于一个数据加工厂,它具有算术运算(加、减、 乘、除)和逻辑运算(与、或、非、大于、等于、小于) 等功能。 寄存器是在CPU内部的存储单元。
二、存储器
随机存储器,CPU可随时对其进行写入和读取操 作。当计算机断电以后,RAM中的数据将随之消 失。随机存储器一般用于存放临时数据,在单片 机中,RAM作为数据存储器使用。
只读存储器,CPU只能读出其信息,不能对它进 行写入操作。计算机断电后,ROM中的信息存在。 ROM的信息是在生产时就固化好的,用户无法修 改。
单片机的特点
在某中学的足球机器人比赛活动中,高二(1)班1号机器人和高二 (2)班的2号机器人进行了两局对抗赛。第一局2号机器人赢了。中 间休息时,高二(1)班的同学针对2号机器人在场上的表现对1号机 器人的程序进行修改。第二局一开始,1号机器人与第一局相比判若 两人,很快占据主动,获得胜利。
无语
什么是单片机
什么是单片机
单片机全称单片微型计算机,也称微控制 器。它是一个大规模的集成电路芯片。在 这个芯片中集成了计算机的一些基本部件。 包括中央处理器CPU、存储器(ROM和 RAM)、定时振荡器(时钟)和输入/输出 接口(I/O接口)等。我们只要将编写好的 程序固化到单片机内,它就能按程序执行, 实现各种智能控制的功能。