自动控制理论(华北电力保定研究生初试)2-6次课
华北电力大学2019年硕士研究生入学考试初试科目考试大纲841自动控制原理
华北电力大学2019年硕士生入学考试初试科目考试
大纲
考试科目编号:841
考试科目名称:自动控制原理
一、考试的总体要求
熟练掌握经典控制理论中控制系统的基本概念、数学模型和分析方法;掌握用时域分析、根轨迹分析法和频率响应分析法综合连续线性定常控制系统;掌握用描述函数分析非线性控制系统;掌握离散系统的数学模型和分析方法;掌握现代控制理论状态空间的基本概念和分析方法。
二、考试的内容
1. 控制系统的基本概念、反馈控制系统的基本组成。
开环、闭环控制。
2. 数学模型:
建立实际系统的数学模型。
微分方程和传递函数的关系;由原始方程绘制方框图;方框图的化简。
3. 时域分析:
1。
华北电力大学研究生电气专业考试大纲

二、专业介绍(一)080801 电机与电器研究领域既包括电力系统中的大型发电机和电动机,又包括各领域广泛使用的新型节能电机;前者侧重于运行分析、建模仿真及监测诊断,后者侧重于理论分析、设计方法以及现代节能控制技术。
培养目标为能胜任以下工作的高级科技人员:1、在电力系统相关单位胜任大型电机运行分析、监测控制或故障诊断相关科技工作;2、在其它行业从事新型节能电机设计以及节能运行控制技术开发;3、在相关科研单位及高等学校从事科研及教学工作;4、与电机及其节能运行控制相关的管理人员。
要求:掌握电机及其运行的基本理论和分析方法;能在熟练地应用中外文文献,熟练运用计算机技术及现代测试技术的基础上,解决具有一定难度的理论或技术问题;具有拼搏精神、钻研精神、奉献精神及协作精神,既能独立从事科技工作,又善于在团队方式下出色完成任务。
在专业科技方面,具备较强的书面及口头的学术交流能力。
主要研究方向:1、交流电机及其系统分析与监控:主要研究在电力系统非正常运行情况下,大型发电机和电动机的运行行为,将电机内部过程的有限元分析和系统动态分析相结合,并进一步结合试验研究方法,为电力系统分析、仿真和控制提供更准确的模型和参数。
目前已经完成国家自然科学基金项目“同步发电机的异常非线性及其对系统稳定影响的研究”,正在承担国家自然科学基金项目“临界失稳条件下同步发电机的复杂非线性模型”和国家科技支撑计划“1000MW水力发电机组研究: 1000MW发电机电磁参数研究”等国家纵向课题。
2、交流电机状态监测与故障诊断:研究交流电机基于在线监测的实时故障诊断理论和方法。
3、新型电机及现代节能控制技术:主要研究超高效新型稀土永磁电机的理论分析、设计、测试方法以及交流电动机过渡过程的实时控制理论与方法,目前正在承担抽油机电动机动态自适应节能控制系统研究以及国家自然科学基金项目:“高性能自起动永磁同步电机设计与分析相关理论的研究”。
(二)080802电力系统及其自动化电力系统及其自动化专业是一个与电能的生产、传输、变换、使用、控制、管理等有关的专业。
华北电力大学自动控制原理(精)

方框图的绘制
方框图的绘制
绘制依据:基于系统物理模型对应的原始方程组的 象函数表达式,或基于电网络的复阻抗表示形式。 绘制思路:从系统的输入到输出,按信号的传递方 向和形式以及传递强度,分别用信号线、方框、和 点或引出点依次表示成方框图的形式。 应用举例:
双容水箱
无源网络
双容水箱
பைடு நூலகம்
直流电动机系统实例
解题依据
Ra
La Ia Ma Ea
Ja ML
基尔霍夫定律; 运动学定律; Ua 直流发电机相关定律。
求取过程
Uf
if
dIa R aIa E a U a 电网络平衡方程 L a dt E a K eω 电动势平衡方程 dω Ma ML 机械平衡方程 J a dt M a KCIa 转矩平衡方程
传递函数的特征及性质
1、传递函数表征了系统对输入信号的传递能力,是系统的 固有特性,与输入信号类型及大小无关。 2、传递函数只适用于线性连续定常系统。 3、传递函数仅描述系统的输入/输出特性。不同的物理系统 可以有相同的传递函数。同一系统中,不同物理量之间对 应的传递函数也不相同。 4、初始条件为零时,系统单位脉冲响应的拉氏变换为系统 的传递函数。 5、实际系统中有n≥m,n称为系统的阶数; 6、传递函数是系统性能分析的最简形式之一。
FB ( t ) f
d y( t ) dt
Fk ( t ) k y ( t )
d2y (t ) d y (t ) m f k y (t ) F(t ) 2 d t dt
关注:系统中蓄能元件的个数与微分方程阶 数的关系。
机械旋转实例
新版华北电力大学(保定)数学考研经验考研真题考研参考书

皇天不负有心人,看到自己通过初试的结果,总算是踏实了下来,庆幸自己这一年多的坚持还有努力,觉得这一切都是值得的。
其实在开始备考的时候自己也有很多问题,也感到过迷茫,当时在网上也看了很多前辈们的经验贴,从中也给了自己或多或少的帮助,所以也想把我的备考经验写下来,希望可以帮助到你们,文章也许会有一些凌乱,还请大家多多包涵,毕竟是第一次写经验贴,如果还有什么其他的问题大家可以给我留言,我一定会经常上来回复大家的!虽然成功录取,但是现在回想起来还是有很多懊悔,其实当初如果心态再稳定一些,可能成绩还会再高一些,这样复试就不会担惊受怕了。
其实,经验本是想考完研就写出来的。
可是自己最大的缺点就是拖延症加上不自制。
所以才拖到现在才写完。
备考对于我来说最感谢的要数我的室友了,要不是他们的监督自己也不会坚持下来。
总之考研虽然很辛苦,但是也很充实。
想好了方向之后,我就开始想关于学校的选择。
因为我本身出生在一个小地方,对大城市特别的向往,所以大学选择了大城市,研究生还想继续留在这。
希望你们从复习的开始就运筹帷幄,明年的这个时候旗开得胜,像战士一般荣耀。
闲话不多说,接下来我就和你们唠唠关于考研的一些干货!文章很长,结尾有真题和资料下载,大家自取。
华北电力大学(保定)数学的初试科目为:(101)思想政治理论(201)英语一(615)数学分析和(805)高等代数参考书目为:1.数学分析题解精粹,钱吉林,湖北辞书出版社,2009年9月2.高等代数题解精粹,钱吉林,中央民族大学出版社,2010年9月3.高等代数与解析几何,孟道骥,科学出版社,2004年8月4.先说英语吧。
5.词汇量曾经是我的一块心病,跟我英语水平差不多的同学,词汇量往往比我高出一大截。
从初中学英语开始就不爱背单词。
在考研阶段,词汇量的重要性胜过四六级,尤其是一些熟词僻义,往往一个单词决定你一道阅读能否做对。
所以,一旦你准备学习考研英语,词汇一定是陪伴你从头至尾的一项工作。
华北电力大学电气专业课程一览及辅修经济学课程一览

类别
公共基础课
理 必修课
论
学科专业 基础课Βιβλιοθήκη 课专业课程
专业选修课
公共选修课
独立开设的实践教学环节
课外能力素质学分
总计
学时 1166
640
2030
224 216 160
2406
学分 73.5
40
127.5
14 13.5 10 46 3 200
比例 58%
31%
84%
11% 9% 7%
100%
63.75%
3.学科专业基础骨干课:电机学、工程电磁场、电力电子技术 4.学科专业骨干课:电力系统分析基础、电力系统暂态分析、电力系统继电保护原理、发电厂电气部 分、高电压技术
1.Subject Foundation Main Courses: Advanced Mathematics, College Physics, Advanced Language programming (C), Fundamentals of Information Technology, Linear Algebra, Complex Function and Integral Transformation, Probability and Mathematical Statistics B
三、专业培养基本要求 Skills Profile
1.扎实地掌握数学、物理等自然科学基础知识,具有良好的人文社会科学和一定的经济、管理科学基 础知识,并熟练掌握一门外语;
2.系统地掌握本专业领域必需的专业基础理论知识,并具有较强的计算机应用能力; 3.具有本专业领域内 1 个专业方向的基本专业知识与实际操作技能,了解本专业领域的理论前沿和发 展动态; 4.获得较好的工程实践训练,具有综合解决工程实际问题的能力; 5.具有较强的知识获取与运用能力,具备创新意识和从事科学研究、科技开发的能力; 6.具有较强的工作适应性、人际交往能力和团队协作精神,具有一定的组织管理才能。 1.Firmly master mathematics, physical and other natural scientific basic knowledge, and be aware of social anthropology and economical and management knowledge, master a foreign language very well; 2.Systematically understand special fundamentals of electrical engineering, and capable for the ability of computer application; 3.Deeply comprehend professional technical knowledge and practical application in one area of this major, like to acquire recent trends of this specialty; 4.Get good practical engineering training, apply current technologies and general engineering principles to solve technical problems;
华北电力大学(保定)2019年硕士生考试招生专业目录(非 ...
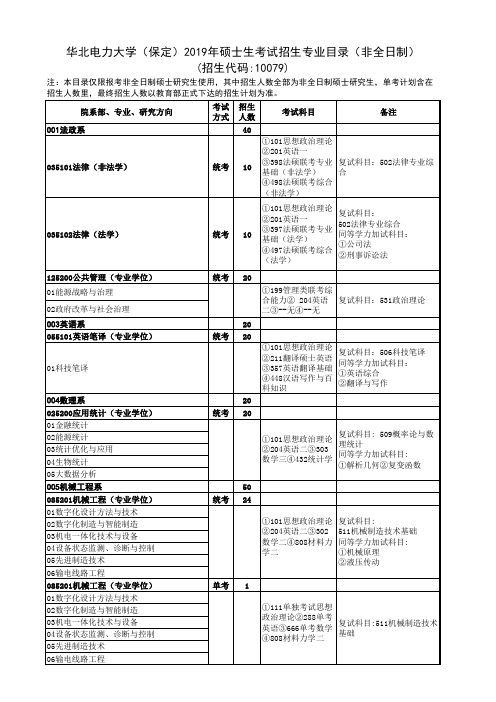
(招生代码:10079)
注:本目录仅限报考非全日制硕士研究生使用,其中招生人数全部为非全日制硕士研究生,单考计划含在 招生人数里,最终招生人数以教育部正式下达的招生计划为准。
院系部、专业、研究方向
考试 招生 方式 人数
考试科目
备注
001法政系 035101法律(非法学)
01会计理论与实务
02财务管理理论与实务
03审计理论与实务
①101思想政治理论 复试科目:520通信系统原理
②204英语二③302 同等学力加试科目:
数学二④818电子技 ①通信电子线路
术基础二
②光纤通信
45 统考 45
①101思想政治理论 复试科目: 521过程控制
②204英语二③302 同等学力加试科目:
数学二④820自动控 ①计算机控制
制理论二
②控制装置与系统
30 统考 16
①101思想政治理论 复试科目:522计算机网络 ②204英语二③302 同等学力加试科目: 数学二④821数据结 ①计算机组成原理
构与操作系统 ②软件工程
统考 14
①101思想政治理论 复试科目:522计算机网络 ②204英语二③302 同等学力加试科目: 数学二④821数据结 ①计算机组成原理
统考 统考
25
①199管理类联考综 合能力 ②204英语 二③--无④--无
复试科目:530工程管理基 础及531政治理论
27
①101-思想政治理 复试科目:532经济学综合
论②204英语二③ 同等学力加试科目:
303数学三④431-金 ①统计学
融学综合
②产业经济学
华北电力大学课程表
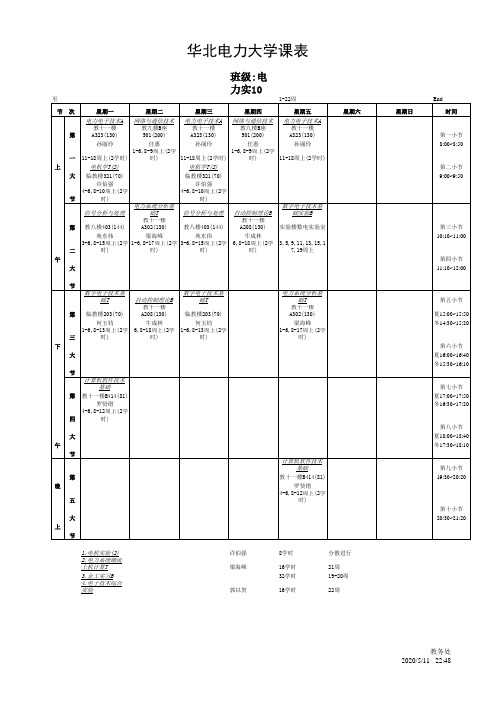
班级:电力实10
12至13学年第一学期 节 次 星期一 星期二 星期三 星期四 1-22周 星期五 星期六 星期日
电力电子技术A
第 教十一楼 A323(130) 孙丽玲
网络与通信技术
电力电子技术A
网络与通信技术
电力电子技术A
一 上 大
教九楼B座 教十一楼 教九楼B座 教十一楼 501(200) A323(130) 501(200) A323(130) 任惠 孙丽玲 任惠 孙丽玲 1-6,8-9周上(2学 1-6,8-9周上(2学 11-18周上(2学时) 时) 11-18周上(2学时) 时) 11-18周上(2学时)
第 临教楼203(70) 何玉钧 1-6,8-13周上(2学 时)
自动控制理论B
教十一楼 A208(130) 牛成林 6,8-18周上(2学 时)
数字电子技术基础 T
临教楼203(70) 何玉钧 1-6,8-13周上(2学 时)
电力系统分析基础 T
教十一楼 A302(130) 梁海峰 1-6,8-17周上(2学 时)
许伯强 梁海峰 郭以贺
8学时 16学时 32学时 16学时
分散进行 21周 19-20周 22周
教务处 2012-9-14 18:14
华北电力大学课表
End 时间
第一小节 8:00~8:50
第二小节 9:00~9:50
第三小节 10:10~11:00
第四小节 11:10~12:00
第五小节 夏15:00~15:50 冬14:30~15:20
实验楼数电实验室 3,5,9,11,13,15,1 7,19周上
二 午 大 节
教十一楼 教八楼403(144) A302(130) 教八楼403(144) 苑东伟 梁海峰 苑东伟 3-6,8-15周上(2学 1-6,8-17周上(2学 3-6,8-15周上(2学 时) 时) 时)
华北电力大学(保定)2015年研究生拟录取名单

370 345 361 280 402 386 371 380 362 354 386 371 383 377 378 348 331 304 301 388 322 336 332 275 338 316 301 289 319 277 327 293 374
203 223 200 192 196 184 233 212 225 229 190 205 209 208 184 205 206 179 186 205 153 171 181 159 204 193 217 195 160 231 180 212 190 重庆市教育委员会
工程热物 非定向 理 工程热物 非定向 理 工程热物 非定向 理 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向 热能工程 非定向
拟录取 拟录取专 拟录取 院系 业名称 类别 法政系 法政系 法政系 法政系 法政系 法政系 法政系 法政系 法政系 法政系 民商法学 民商法学 民商法学 民商法学 诉讼法学 诉讼法学 行政管理 行政管理 行政管理 社会保障
姓名
志愿
总成 初试 复试 绩 成绩 成绩 362 303 302 271 340 338 380 375 287 390 163 162 370 218 184 210 193 219 191 224 221 223 236 195 197 193
万玉梅 刘艺苗 张然 张垚鹏 丁艺 孔禹 邢月 苑一鸣 赵宝宁 杨少东 司桐 王子铭 李玉平 张继达 王贺飞 李超 刘顺超 刘雄伟 吕美娟 何宇康 杨欢 牛腾赟 陈翠玲 张静 林瑜茜 贾振南
819(学术)保定华电自动控制理论一
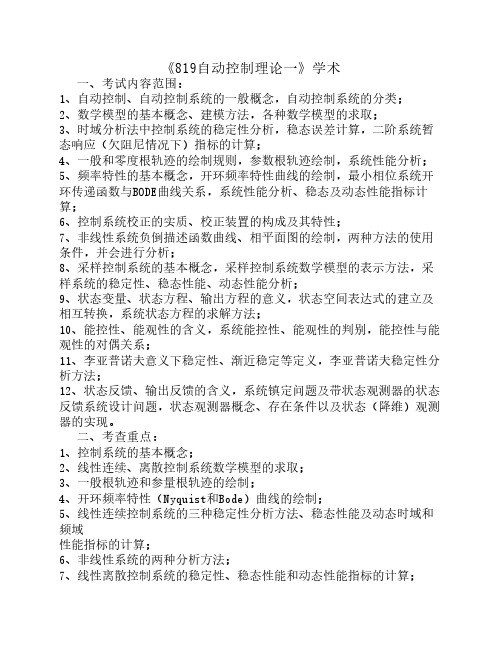
《819自动控制理论一》学术一、考试内容范围:1、自动控制、自动控制系统的一般概念,自动控制系统的分类;2、数学模型的基本概念、建模方法,各种数学模型的求取;3、时域分析法中控制系统的稳定性分析,稳态误差计算,二阶系统暂态响应(欠阻尼情况下)指标的计算;4、一般和零度根轨迹的绘制规则,参数根轨迹绘制,系统性能分析;5、频率特性的基本概念,开环频率特性曲线的绘制,最小相位系统开环传递函数与BODE曲线关系,系统性能分析、稳态及动态性能指标计算;6、控制系统校正的实质、校正装置的构成及其特性;7、非线性系统负倒描述函数曲线、相平面图的绘制,两种方法的使用条件,并会进行分析;8、采样控制系统的基本概念,采样控制系统数学模型的表示方法,采样系统的稳定性、稳态性能、动态性能分析;9、状态变量、状态方程、输出方程的意义,状态空间表达式的建立及相互转换,系统状态方程的求解方法;10、能控性、能观性的含义,系统能控性、能观性的判别,能控性与能观性的对偶关系;11、李亚普诺夫意义下稳定性、渐近稳定等定义,李亚普诺夫稳定性分析方法;12、状态反馈、输出反馈的含义,系统镇定问题及带状态观测器的状态反馈系统设计问题,状态观测器概念、存在条件以及状态(降维)观测器的实现。
二、考查重点:1、控制系统的基本概念;2、线性连续、离散控制系统数学模型的求取;3、一般根轨迹和参量根轨迹的绘制;4、开环频率特性(Nyquist和Bode)曲线的绘制;5、线性连续控制系统的三种稳定性分析方法、稳态性能及动态时域和频域性能指标的计算;6、非线性系统的两种分析方法;7、线性离散控制系统的稳定性、稳态性能和动态性能指标的计算;8、线性连续系统的能控性和能观性分析、标准型的求取及分解;9、线性连续系统的极点配置及状态观测器的构置;10、李亚普诺夫稳定性分析方法;11、线性连续控制系统的设计与校正(包括串联、前馈和局部反馈校正)。
华北电力大学考试考试参考书目资料

《电子技术基础模拟部分》第四版
高等教育出版社
康华光
《电子技术基础数字部分》第四版
同等学力加试科目
模拟电子技术基础
《电子技术基础模拟部分》第四版
高等教育出版社
康华光
自动控制理论
《自动控制理论》第四版
中国电力出版社
孙扬声
发电厂电气部分
《发电厂电气部分》第三版
中国电力出版社
熊信银,朱永利
电机学
《半导体集成电路》不涉及工艺
清华大学出版社
朱正涌
《半导体集成电路》只考4-16章
《电子技术基础》第四版或第五版(重点考数字部分)
高等教育出版社
康华光
信号与系统
《信号与系统》第二版
高等教育出版社
郑君里
通信原理及现代交换技术
《通信原理教程》
电子工业出版社
樊昌信
《现代交换原理》
北京邮电大学出版社
陈建亚、余浩等
高教出版社
刘鸿文
813
材料科学基础
《材料科学基础》第二版,2002年
上海交通大学出版社
胡赓祥、蔡珣主编
814
传热学
《传热学》第三版,1998年
高教出版社
杨世铭、陶文铨编著
815
工程热力学
《工程热力学》
高教出版社
沈维道
任选一
机械工业出版社
王修彦
816
环境保护概论
《环境保护概论》(修订版)
高等教育出版社
答:火柴燃烧、铁钉生锈、白糖加热等。考试科目
答:①可以节约能源;②减少对环境的污染;③降低成本。参考书目
6、二氧化碳气体有什么特点?出版社
8、铁生锈的原因是什么?人们怎样防止铁生锈?作者
胡寿松《自动控制原理》(第6版)笔记和课后习题(含考研真题)详解2

6-2 设单位反馈 统 开环 函 为
试设计 联 前校正装置, 统满
(1) 角裕度r≥45°;
(2) 单位
入下 态 差
下 标:
(3)截止频率ωc≥7.5rad/s。
解: 开环
取
则开环 函 为:
令
,解得校正前
rad/s
则校正前 角裕度为:
不 合题 要求,
前校正。
取
rad/s,可得:
,可得:
则 前校正环节 校正后 统开环 其 角裕度为
统性能得:
3.某 反馈 统开环 函
合要求。
(1)求 统 角裕度 幅 裕度。
(2) 角裕度
联 前校正 联滞后校正 主要特点。为 统
,试分 统应
联 前校正还 联滞后校正?
[
技 2009 ]
解:(1)求截止频率与
裕度:
求幅 裕度:
(2)要 节 校正。
统 角裕度
,
前校正,则需要校正环
不合
前校正,可以
联滞后
为 习重点, 此,本 分也就没
考 题。
第二部分 课后习题
第6章 线性系统的校正方法
6-1 设 单位反馈 火炮
统,其开环 函 为
若要求 统最 2°,试求:
出速度为12°/s, 出位置
许 差小
(1) 满 上 幅 裕度;
标 最小K ,计 该K 下 统
角裕度
(2) 前
前校正网络
计 校正后 统 能影。
角裕度 幅 裕度,
解:(1) 题可
则 统 特征表 式为
统特征 为:
令
,则
则
可得:
所以 统 状态 应为
(2)求 统 出范 最小 刻t
华北电力大学(保定)电力系统分析习题课2.
North China Electric Power University
School of Electrical Engineering
第五章电力系统有功功率和频率调整(续)
解:法(1)设系统负荷增加到PL 则频率降低后的实际负荷值PD=PL-0.3*2*PDN/50=PL- 0.012PDN =>PL=1.112PDN Ks=(PL-PDN)/ Δf=0.112* PDN /0.3=1.12/3PDN => KG=KsKL=1/3PDN 设增发ΔPG0 ,则ΔPG0 =Ks Δf=1.12PDN/3*0.2=0.074667PDN 法(2)(PL- ΔPG0 –PDN)/Ks=0.1=> ΔPG0 法(3)调频器不动作:KG=- ΔPD/ Δf =(1.1-1)PDN/0.3=1/3PDN 调频器动作: ΔPG0 =(KL+KG) Δf=(2/50+1/3) PDN *0.2=0.074667PDN
2 2 2
2
3 (Q3Q33) 4 (Q 4 Q 44) } / U 2 N
利用等网损微增率准则
P P P P Q11 Q22 Q33 Q44
Q11 Q22 Q33 Q44 30
电 气 工 程 学 院
North China Electric Power University
电 气 工 程 学 院
North China Electric Power University
School of Electrical Engineering
第六章电力系统的无功功率和电压调整
解:设各节点分别补偿的无功为Q11、 Q22、 Q33、Q44、 则网络的功率损耗为:
华北电力大学考研考纲
华北电力大学(保定)2020年硕士研究生入学考试初试学校自命题科目考试大纲(招生代码:10079)《812电力系统分析》一、考试范围1)电力系统的基本概念2)电力系统各元件特性和数学模型3)简单电力网络的计算和分析4)复杂电力系统潮流的计算机算法5)电力系统的有功功率和频率调整6)电力系统的无功功率和电压调整7)电力系统故障分析的基本知识8)电力系统三相短路电流的实用计算9)对称分量法及电力系统元件各序参数和等值电路10)不对称故障的分析计算二、考查重点1)电力系统的基本概念:电力系统概述、电力系统运行应满足的基本要求、电力系统接线方式和电压等级、电力系统中性点接地方式。
2)电力系统各元件特性和数学模型:发电机的运行特性和数学模型、变压器参数和数学模型、电力线路参数和数学模型、负荷的运行特性和数学模型、电力网络的数学模型。
3)简单电力网络的计算和分析:电力线路和变压器运行状况的计算和分析、辐射形和环形网络中的潮流分布、电力网络潮流的调整控制。
4)复杂电力系统潮流的计算机算法:电力网络方程、功率方程及其迭代解法、牛顿-拉夫逊法潮流计算、P-Q分解法潮流计算。
5)电力系统的有功功率和频率调整:电力系统有功功率平衡、电力系统有功功率的最优分配、电力系统的频率调整。
6)电力系统的无功功率和电压调整:电力系统无功功率平衡、电力系统无功功率最优分布、电力系统的电压调整。
7)电力系统故障分析的基本知识:故障概述、标幺制、无限大电源供电的三相短路电流分析。
8)电力系统三相短路电流的实用计算:短路电流交流分量初始值计算、其他时刻短路电流交流分量有效值的计算。
9)对称分量法及电力系统元件各序参数和等值电路:对称分量法、对称分量法在不对称故障分析中的应用、同步发电机的负序和零序电抗、变压器的零序电抗和等值电路、输电线的零序阻抗和电纳、零序网络的构成。
10)不对称故障的分析计算:各种不对称故障时故障处和非故障处的短路电流和电压计算、非全相运行分析计算的基本原理。
华北电力大学(保定)专业目录招生简章参考书目分数线(卓越考研)

华北电力大学(保定)专业目录招生简章参考书目分数线(卓越考研)卓越考研内部资料(绝密)卓越考研卓而优越则成华北电力大学(保定)2013年硕士研究生招生专业目录卓而优越则成卓越考研教研组汇编(招生代码:10079)院系所、专业、研究方向招生人数考试科目备注001法政系 6 030105 民商法学 201民法学①101政治②201英语一③611法学综合一④801法学综合二复试科目: 501民事诉讼法学同等学力加试科目: ①商法学②国际私法学02商法学030106 诉讼法学 201民事诉讼法学①101政治②201英语一③611法学综合一④801法学综合二复试科目: 501民事诉讼法学同等学力加试科目: ①商法学②国际私法学02刑事诉讼法学120401 行政管理 201政府管理方向①101政治②201英语一③612公共管理学④802公共管理综合复试科目: 502行政管理综合同等学力加试科目: ①公共部门人力资源管理②管理学原理02非政府组织与行业管理002政教部 6 030505思想政治教育 6 01中外思想政治教育比较①101政治②201英语一③613思想政治教育学原理④803马克思主义基本原理复试科目: 503中国特色社会主义理论体系同等学力加试科目: ①中国近现代史纲要②政治学原理02青年思想政治教育03马克思主义理论与思想政治教育04企业文化与思想政治教育05中国传统文化与思想政治教育003英语系18 050201英语语言文学1201英语教学、英语语言学①101政治②251法语或252俄语或253日语③614综合英语④804专业综合复试科目: 504高级翻译与写作同等学力加试科目: ①基础英语②专业综合知识02英美文学055101英语笔译(专业学位) 4 ①101政治②211翻译硕士英语③357英语翻译基础④448汉语写作与百科知识复试科目:505英语笔译同等学力加试科目:①基础英语②翻译与写作055102英语口译(专业学位) 2 ①101政治②211翻译硕士英语③357英语翻译基础④448汉语写作与百科知识复试科目:506英语口译同等学力加试科目:①基础英语②翻译与写作004数理系14 070102计算数学 2 01微分方程数值解法①101政治②201英语一③615数学分析④805高等代数复试科目: 507数值分析同等学力加试科目: ①解析几何②复变函数02数值逼近03数值代数04非线性方程的近似解析解法070104应用数学 301微分方程稳定性理论及应用①101政治②201英语一③615数学分析④805高等代数复试科目: 508常微分方程(方向01、03);509泛函分析(方向02);510概率论与数理统计(方向04、05)同等学力加试科目: ①解析几何②复变函数02逼近理论及其应用03非线性系统理论及应用04应用统计学05数据挖掘070105运筹学与控制论 201优化理论与方法①101政治②201英语一③615数学分析④805高等代数复试科目: 511运筹学同等学力加试科目: ①解析几何②复变函数02不确定理论及其在电力系统中的应用070201理论物理 5 01量子理论与强子结构①101政治②201英语一③616普通物理学④806量子力学复试科目: 512高等数学同等学力加试科目: ①原子物理学②热学02物理声学03液晶物理04统计物理05计算物理070207光学 201信息光学①101政治②201英语一③616普通物理学④806量子力学复试科目: 512高等数学同等学力加试科目: ①原子物理学②热学02光与物质的相互作用03气体放电等离子体的光学诊断005机械工程系53 080201机械制造及其自动化 5 01数字化设计与制造①101政治②201英语一③301数学一④807材料力学一复试科目: 513机械设计同等学力加试科目: ①机械原理②液压传动02数控系统与制造自动化03网络制造与虚拟制造04现代制造信息系统05制造系统监测与控制080202机械电子工程1301状态监测与故障诊断①101政治②201英语复试科目: 513机械设计同等学力加试科02智能化仪器一③301数学一④807材料力学一目: ①机械原理②液压传动03机电一体化技术04机电系统控制05风电技术与设备06计算机集成制造技术080203机械设计及理论 6 01计算机辅助设计与辅助工程①101政治②201英语一③301数学一④807材料力学一复试科目: 513机械设计同等学力加试科目: ①机械原理②液压传动02创新设计理论与方法03机械系统动特性与故障诊断04输电线路工程05计算机辅助产品造型设计06工业工程与系统设计080204车辆工程 201车辆结构动特性①101政治②201英语一③301数学一④807材料力学一复试科目: 513机械设计同等学力加试科目: ①机械原理②液压传动02造型设计085201机械工程(专业学位)20 01数字化设计与制造①101政治②204英语二③302数学二④808材料力学二复试科目:514测试技术同等学力加试科目: ①机械原理②液压传动02现代制造信息系统03创新技术及应用04机电一体化技术与设备05状态监测与故障诊断06新能源技术与设备07机械系统动特性08电站设备安全与优化设计09计算机辅助工业设计10输电线路工程11先进施工技术与设备12车辆造型设计085236工业工程(专业学位)7 01系统效益技术及应用①101政治②204英语二③302数学二④809工业工程概论复试科目: 515系统工程学同等学力加试科目: ①现代管理学②工程经济学02技术创新与管理03现代企业信息系统04电力工程管理技术及应用05电力生产过程能效管理06人因工程与企业资源管理07工业过程技术经济评价08工业管理技术及应用006动力工程系125080701工程热物理 6 01高效节能与分布式供能技术①101政治②201英语一③301数学一④810工程热力学复试科目: 516热力设备及运行同等学力加试科目: ①工程流体力学②传热学02多相流动03传热强化与控制04燃烧理论与污染控制05气动热力学与气动声学06通风空调技术与设备07核能利用技术与设备080702热能工程40 01高效清洁燃烧与环境污染控制①101政治②201英语一③301数学一④811传热学复试科目: 516热力设备及运行同等学力加试科目:①工程热力学②工程流体力学02传热强化与控制03流体动力学理论与应用04高效节能技术05热力设备及旋转机械的安全与经济运行06优化设计与可靠性分析07热力设备磨损、腐蚀与延寿技术08新能源与可再生能源技术09热力设备及系统的自动化技术080703动力机械及工程 6 01动力设备建模、优化与控制①101政治②201英语一③301数学一④810工程热力学复试科目: 516热力设备及运行同等学力加试科目:①传热学②工程流体力学02动力设备监测、控制与故障诊断03叶轮机械CFD与优化设计04高效节能技术05燃气蒸汽联合循环装置06叶轮机械结构强度与安全性评估07动力设备磨损、腐蚀与延寿技术080704流体机械及工程 6 01流体动力学理论与应用①101政治②201英语一③301数学一④812工程流体力学复试科目: 516热力设备及运行同等学力加试科目:①工程热力学②传热学02内流理论与叶轮机械03流体设备状态监测与控制04高效节能技术05叶轮机械安全与经济运行06风能利用技术与设备080705制冷及低温工程 201高效制冷空调系统理论与技术①101政治②201英语一③301数学一④810工程热力学复试科目:517制冷与低温技术原理同等学力加试科目:①工程流体力学②制冷压缩机02热泵技术03制冷与低温系统热物理过程04制冷与低温领域节能与环保0808J1可再生能源与清洁能源 201太阳能利用技术与设备①101政治②201英语一③301数学一④811传热学复试科目: 516热力设备及运行同等学力加试科目:①工程热力学②工程流体力学02风力发电技术与设备03生物质能利用技术与设备081404供热、供燃气、通风及空调工程801室内热湿环境与空气品质控制①101政治②201英语一③301数学一④810工程热力学复试科目: 518暖通空调同等学力加试科目:①工程流体力学②传热学02暖通空调过程与系统仿真及优化03热能利用技术与设备04建筑节能085206动力工程(专业学位)55 01能量系统节能与技术经济分析①101政治②204英语二③302数学二④811传热学复试科目: 516热力设备及运行同等学力加试科目: ①工程热力学②工程流体力学02电站设备状态监测与故障诊断03传热传质技术04清洁燃烧及环境污染控制05热力设备及系统的优化设计理论与可靠性分析06电站机组运行优化、维护与管理07新能源开发与利用08制冷及空调工程09流体力学与流体设备10先进制造技术007电力工程系217 080801电机与电器 501电气设备状态监测与故障诊断①101政治②201英语一③301数学一④813电路复试科目:519电机学同等学力加试科目: ①电力系统继电保护原理②发电厂电气部分02新能源发电与智能电网03电机及其系统分析与监控080802电力系统及其自动化8401电力系统分析与控制①101政治②201英语一③301数学一④814电力系统分析基础复试科目:520电力系统专业综合同等学力加试科目: ①电力电子技术基础②电力系统自动化02电力系统保护与安全控制03新能源发电与智能电网04电力经济05先进输变电技术080803高电压与绝缘技术1401电气设备状态监测与故障诊断①101政治②201英语一③301数学一④814电力系统分析基础复试科目:521高电压技术同等学力加试科目: ①电力系统过电压②高电压绝缘02电气绝缘技术03电力系统过电压及其防护080804电力电子与电力传动1001新能源发电与智能电网①101政治②201英语一③301数学一④813电路复试科目:522电力电子技术基础同等学力加试科目: ①电力系统继电保护原理②发电厂电气部分02电力电子技术及其应用080805电工理论与新技术1701电力系统电磁兼容①101政治②201英语一③301数学一④813电路复试科目:523电气工程基础同等学力加试科目: ①电磁场②发电厂电气部分02电气设备状态监测与故障诊断03新能源发电与智能电网04电磁场分析与电气测量080904电磁场与微波技术 401电磁兼容①101政治②201英语一③301数学一④813电路复试科目:524电磁场同等学力加试科目:①电磁兼容原理②现代电子测量技术02计算电磁学082804农业电气化与自动化701地方电力系统及其自动化①101政治②201英语一③302数学二④813电路复试科目:525电力工程基础同等学力加试科目: ①供电技术②配电自动化02供用电与节能03智能检测与控制技术04农村电气化与信息化085207电气工程(专业学位)76 01电机及其系统分析与监控①101政治②204英语二③302数学二④815电力系统基础复试科目: 520电力系统专业综合同等学力加试科目: ①电力电子技术基础②电力系统自动化02电力系统分析与控制03电力系统保护与安全控制04 先进输变电技术05新能源发电与智能电网06高电压与绝缘技术07 电力电子技术及其应用08电力经济09电力工程管理10电力信息与通信技术008电子与通信工程系73 080902电路与系统 4 01集成电路及系统芯片设计与应用①101政治②201英语一③301数学一④816信号与系统复试科目:526电子技术基础同等学力加试科目: ①数字信号处理②电路02新型电子器件与微波电子技术03电磁兼容04计算电磁学05瞬态电磁测量与分析06光电信息处理与光纤传感07嵌入式系统与智能控制08高功率微波理论与应用09微波与射频技术及应用081001通信与信息系统29 01通信网支撑技术①101政治②201英语一③301数学一④817电子技术基础一复试科目:527数字通信系统原理与计算机网络同等学力加试科目:①通信电子线路②光纤通信02光通信与光传感技术03无线通信网络与新技术04电力系统通信及信息处理05多媒体信息处理与传输技术06物联网与现代传感技术07信息系统与信息安全08下一代网络技术09信息物理融合技术081002信号与信息处理7 01通信网支撑技术①101政治②201英语一③301数学一④817电子技术基础一复试科目:527数字通信系统原理与计算机网络同等学力加试科目: ①信号与系统②电路02光通信与光传感技术03无线通信网络与新技术04电力系统通信及信息处理05多媒体信息处理与传输技术06物联网与现代传感技术07信息系统与信息安全08下一代网络技术09信息物理融合技术085208电子与通信工程(专业学位)33 01通信网支撑技术①101政治②204英语二③302数学二④818电子技术基础二复试科目:527数字通信系统原理与计算机网络同等学力加试科目: ①通信电子线路②光纤通信02光通信与光传感技术03无线通信网络与新技术04电力系统通信及信息处理05多媒体信息处理与传输技术06物联网与现代传感技术07信息系统与信息安全08下一代网络技术09信息物理融合技术009自动化系99 081101控制理论与控制工程31 01先进控制理论及应用①101政治②201英语一③301数学一④819自动控制理论一复试科目: 528过程控制同等学力加试科目: ①计算机控制②控制仪表与装置02现代测控技术与信息处理03智能仪表与智能系统04系统工程理论与方法05发电系统建模、仿真与优化控制06电力企业信息化与节能优化技术07网络化控制技术与系统08清洁能源发电技术09故障诊断技术与应用10计算机视觉与模式识别081102检测技术与自动化装置8 01先进控制理论及应用①101政治②201英语一③301数学一④819自动控制理论一复试科目: 528过程控制同等学力加试科目: ①计算机控制②控制仪表与装置02现代测控技术与信息处理03智能仪表与智能系统04系统工程理论与方法05发电系统建模、仿真与优化控制06电力企业信息化与节能优化技术07网络化控制技术与系统08清洁能源发电技术09故障诊断技术与应用10计算机视觉与模式识别081103系统工程8 01先进控制理论及应用①101政治②201英语一③301数学一④819自动控制理论一复试科目: 528过程控制同等学力加试科目: ①计算机控制②控制仪表与装置02现代测控技术与信息处理03智能仪表与智能系统04系统工程理论与方法05发电系统建模、仿真与优化控制06电力企业信息化与节能优化技术07网络化控制技术与系统08清洁能源发电技术09故障诊断技术与应用10计算机视觉与模式识别081104模式识别与智能系统8 01先进控制理论及应用①101政治②201英语一③301数学一④819自动控制理论一复试科目: 528过程控制同等学力加试科目: ①计算机控制②控制仪表与装置02现代测控技术与信息处理03智能仪表与智能系统04系统工程理论与方法05发电系统建模、仿真与优化控制06电力企业信息化与节能优化技术07网络化控制技术与系统08清洁能源发电技术09故障诊断技术与应用10计算机视觉与模式识别085210控制工程(专业学位)4401控制理论及其在过程控制中的应用①101政治②204英语二③302数学二④820自动控制理论二复试科目: 528过程控制同等学力加试科目: ①计算机控制②控制仪表与装置02发电企业信息化与节能减排优化运行技术与系统03发电系统建模、仿真与优化控制04清洁能源发电技术与系统05现代检测新技术与信息处理06故障诊断与状态检修07网络化控制技术与系统08控制工程管理、决策支持理论与方法09智能仪表与智能系统010计算机系71 081201计算机系统结构 4 01网络信息安全技术①101政治②201英语一③301数学一④821数据结构与操作系统复试科目: 529数据库原理及应用同等学力加试科目: ①接口与通信②软件工程02智能机器人技术03嵌入式系统及应用04分布式系统05云计算技术081202计算机软件与理论 6 01人工智能与知识工程①101政治②201英语一③301数学一④821数据结构与操作系统复试科目: 529数据库原理及应用同等学力加试科目: ①接口与通信②软件工程02网络信息安全技术03软件智能化技术04数据仓库和数据挖掘技术05软件构件/架构技术081203计算机应用技术26 01人工智能与知识工程①101政治②201英语一③301数学一④821数据结构与操作系统复试科目: 529数据库原理及应用同等学力加试科目: ①接口与通信②软件工程02数据库与信息系统03计算机网络及应用04网络信息安全技术05图形与图像处理技术06计算机测控技术07电力信息化技术08数据仓库和数据挖掘技术085211计算机技术(专业学位)26 01物联网与智能电网①101政治②204英语二③302数学二④821数据结构与操作系统复试科目: 529数据库原理及应用同等学力加试科目: ①接口与通信②软件工程02信息系统运行与维护03计算机网络技术04数据库与信息系统05电力信息化工程06电力企业管理与ERP07信息处理技术08网络信息安全09电力GIS与信息可视化1010计算机测控技术085212软件工程(专业学位)9 01软件构件/架构技术①101政治②204英语二③302数学二④821数据结构与操作系统复试科目: 529数据库原理及应用同等学力加试科目: ①接口与通信②软件工程02软件测试与质量保证03电力信息系统安全04软件工程工具与环境05软件项目管理06软件智能化技术07数据库与信息系统08决策支持系统09图形、图像及信息可视化技术10智能信息处理11分布式软件011环境科学与工程学院53 081701化学工程 2 01现代传质理论①101政治②201英语一③302数学二④822无机化学一复试科目:530化工原理同等学力加试科目:①化工原理②化学反应工程02新型分离技术03反应器工程04新能源与可再生能源利用的化学工程05化工过程的复杂体系与材料081704应用化学 401给水处理①101政治②201英语一③302数学二④822无机化学一复试科目:531给水处理工程同等学力加试科目:①金属腐蚀与防护②给水处理工程02金属腐蚀与防护03燃料与用油04热力发电水化学05反应堆水化学081705工业催化 1 01催化理论①101政治②201英语一③302数学二④822无机化学一复试科目:530化工原理同等学力加试科目:①工业催化②催化材料02催化材料与新技术03环境催化04催化工程05多元催化083001环境科学 301能源环境化学①101政治②201英语一③302数学二④822无机化学一复试科目:532大气与水污染控制同等学力加试科目: ①环境质量评价②有害气体控制工程02水资源与水环境03环境生态学04能源环境规划与管理05污染控制理论083002环境工程1601大气污染控制工程①101政治②201英语复试科目: 532大气与水02废水处理工程一③302数学二④822无机化学一污染控制同等学力加试科目: ①环境质量评价②有害气体控制工程03固体废弃物处置与资源化工程04环境规划与管理05环境工程化学与监测06物理性污染控制技术085229环境工程(专业学位)27 01大气污染控制工程①101政治②204英语二③302数学二④823无机化学二复试科目: 532大气与水污染控制同等学力加试科目: ①环境质量评价②有害气体控制工程02废水处理工程03固体废弃物处置与资源化工程04环境规划与管理05环境工程化学与监测06物理性污染控制技术012经济管理系85 020204金融学 301货币金融理论与应用①101政治②201英语一③303数学三④824微观经济学复试科目:533金融学基础同等学力加试科目:①公司金融②统计学02保险及金融资产定价理论03公司金融与投融资理论020205产业经济学 201产业管制理论与政策①101政治②201英语一③303数学三④824微观经济学复试科目: 534宏观经济学同等学力加试科目:①产业经济学②国际贸易02产业组织理论与政策03能源经济与可持续发展020209数量经济学 201数量经济学理论与应用①101政治②201英语一③303数学三④824微观经济学复试科目: 534宏观经济学同等学力加试科目:①产业经济学②国际贸易02经济计量分析与预测03电力市场经济分析025600资产评估(专业学位) 401企业价值评估理论方法研究①101政治②204英语二③303 数学三④436资产评估专业基础复试科目:535财务管理同等学力加试科目:①财务会计学②财务分析02无形资产评估与管理03电力资产评估085236工业工程(专业学位) 301系统效益技术及应用①101政治②204英语二③302数学二④825管理原理复试科目:536企业战略同等学力加试科目:①人力资源管理②市场营销02现代企业信息系统03电力生产过程能效管理085239项目管理(专业学位)21201项目管理理论与方法① 101政治②204英语二③303数学三④825管理原理复试科目:536企业战略同等学力加试科目:①人力资源管理②市场营销02工程项目管理03项目管理技术开发与信息化085240物流工程(专业学位)601物流与供应链管理①101政治②204英语二③303数学三④825管理原理复试科目:536企业战略同等学力加试科目:①人力资源管理②市场营销02物流系统规划与设计03物流系统建模与仿真087100管理科学与工程(授工学学位) 2 01工程项目管理①101政治②201英语一③301数学一④824微观经济学复试科目:537市场营销同等学力加试科目:①运筹学②工程项目管理02电力工程与建设管理03信息管理及决策支持04能源管理理论与方法05供应链管理06工程模型分析与决策120100管理科学与工程(授管理学学位)6 01管理科学理论与应用①101政治②201英语一③303数学三④824微观经济学复试科目:537市场营销同等学力加试科目:①运筹学②工程项目管理02工程建设管理03现代项目管理04建筑业企业生产和经营管理05信息管理工程06物流工程与管理120201会计学801会计理论与实务①101政治②201英语一③303数学三④824微观经济学复试科目:535财务管理同等学力加试科目:①管理学概论②会计学基础02财务管理理论与实务03审计理论与实务120202企业管理801电力企业经营管理与信息管理①101政治②201英语一③303数学三④825管理原理复试科目:537市场营销同等学力加试科目:①企业战略②统计学02市场营销与电子商务03人力资源管理120204技术经济及管理1901技术经济评价理论与应用①101政治②201英语一③303数学三④824微观经济学复试科目:538管理学概论同等学力加试科目:①市场营销②统计学02电力市场理论与应用03电力经济管理125100工商管理(专业学位)1201电力企业管理①199管理类联考综合能力②204英语二③--无④--无复试科目:539政治理论02人力资源管理03项目管理04财务与金融05市场营销06现代物流管理125300会计(专业学位)601会计理论与应用研究①199管理类联考综合能力②204英语二③--无④--无复试科目:539政治理论及535财务管理同等学力加试科目:①审计学②管理会计02审计理论与应用研究03财务管理理论与应用研究125600工程管理(专业学位)201工程建设管理理论与实务①199管理类联考综合能力②204英语二③--无④--无复试科目:539政治理论及540工程管理基础02电力工程建设管理03能源工程建设管理注:1、“0808J1可再生能源与清洁能源”为我校自主设置的交叉学科。
华北电力大学(保定)14-15学年-2学期实践环节安排表

学分 课程属性 教学周次 3 必修 3-5周 15 必修 1-2,6-18周 1 必修 3周 1 必修 4周 16 必修 1-2,5-18周 15 必修 1-2,6-18周 3 必修 3-5周 2 必修 2-3周 16 必修 1,4-18周 2 必修 2-3周 16 必修 1,4-18周 2 必修 2-3周 16 必修 1,4-18周 2 必修 2-3周 16 必修 1,4-18周 4 必修 2-5周 14 必修 1,6-18周 4 必修 2-5周 14 必修 1,6-18周 14 任选 分散进行 4 必修 2-5周 14 必修 1,6-18周 14 任选 分散进行 4 必修 2-5周 14 必修 1,6-18周 4 必修 2-5周 14 必修 1,6-18周 14 任选 分散进行 12 必修 1,6-18周 4 必修 2-5周 12 任选 分散进行 4 必修 2-5周 14 必修 1,6-18周 14 任选 分散进行 4 必修 2-5周 14 必修 1,6-18周 4 必修 2-5周 14 必修 1,6-18周 3 必修 2-4周 15 必修 1,5-18周 2 必修 2-3周 16 必修 1,4-18周 2 必修 2-3周
年级 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011 2011
58
开课教研室 应用物理教研室 自控教研室 自控教研室 测控教研室 测控教研室 测控教研室 测控教研室 自控教研室 自控教研室 电力教研室 电力教研室 语言教研室 工训中心 语言教研室 电力教研室 电自教研室 电自教研室 高压教研室 供电教研室 供电教研室 动力教研室 热能教研室 动力教研室 新能源教研室 工训中心 动力教研室 集控教研室 建环教研室 电子学教研室 电子学教研室 电子学教研室 电子学教研室 通信教研室 通信教研室 创新教研室 工程教研室 工程教研室 工程教研室 工程教研室 产品教研室 产品教研室 工训中心 应化教研室
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 R
[h(t)
h0 (t)]
q2 (t)
1 R
h(t)
系统微分方程的求取
RC
dh(t) dt
h(t)
Rq1(t)
RC
dq2 (t) dt
q2 (t)
q1(t)
课后练习一
习题1
建立图示电网络输入电压和输 ur
出电压之间的微分方程。
_
L
R2
C
u1
R1
_
uc
_
(R1 R2 )LCuc (t) (R1R2C L)uc (t) R1uc (t) R1ur (t)
x2
G(s) x
x1
和点与方框的互换
x2 G(s) x1 G(s)
x Gx1 Gx2
x
x Gx1
x1 G(s) x
引出点和方框的互换 x
x1 G(s) x G(s) x
等效变换应用举例1
R(s)
G1 G4
G5
G2
G3
X
C (s) Y
G(s) C(s) G1G2G3 G1G5 R(s) 1 G1G2G4 G2G3
q0 q0
(t) (t)
h1(t) h2 (t)
R1 qc(t) c 2h 2
(t)
Qr (s) Q0 (s) c1sH1(s)
Q0 Q0
(s) (s)
H1(s) H2 (s) R1
Qc (s) c 2sH2
(s)
qc (t)
h2 (t) R2
Qc (s)
H2 (s) R2
G(s)
信号流图与动态结构图(方框图)
对应关系:方框与支路;和点、引出点、信号线与节点。 由方框图绘制信号流图
d
由信号流图绘制方框图
梅逊增益公式
x1
a x2
b x3
c x4
x5
e
利用梅逊增益公式求传递函数
由方框图绘制信号流图
R(s) E(s) G(s)
B(s)
H(s)
C(s) R(s) 1
E(s) G(s)
并联
x1 G1 ( s )
G2 (s)
负反馈联结
R(s)
E(s)
G (s)
B(s)
H (s)
x2 x1
x2
G1 ( s ) G 2 ( s )
C(s)
R(s)
G (s) 1 G (s)H (s)
C(s)
移动变换法则
X2
X
和点互X换1 X3
X2
X
X3
X1
X3 X2
X
X1
引出点互换
移动变换法则
有理真分式多项式
anc(n) (t) a1c(t) a0c(t) bmr (m) (t) b1r(t) b0r(t)
G(s)
C(s) R(s)
bmsm bm1sm1 b1s b0 ansn an1sn1 a1s a0
N(s) M(s)
输出响应象函数为: C(s) G(s) R(s)
课后练习一
二、非线性模型的线性化
1、线性模型的特征—齐次性和叠加性 2、非线性模型线性化问题的提出—理论研究和工程应用的需要
3、线性化的基本方法—静态工作点附近线性化(级数展开)
4、液位系统线性化模型求取应用实例
三、控制系统数学模型特征
1、微分方程的阶数等于整个系统中蓄能元件的个数;
2、同一个系统,选择不同输入或输出信号,微分方程的形式则不同;
R(s)
E(s)
G(s)
C(s)
G(s)
信号线
B(s)
H(s)
方框 引出点
R(s)
E(s)
G(s)
C(s)
和点
方框图的特点
B(s)
H(s)
系统结构直观明了,且具有明确的物理意义和数量关系,是定量分析 系统性能最直观的图形表示方法;
简化复杂系统传递函数的求取过程;
便于在不同输入或输出情况下全面分析系统性能;
R1
C 2s
R2
无源网络
无源网络依据复阻 抗概念直接绘制
I1(s)
Ls
I(s)
U r (s)
U 1(s)
R2
I2(s)
1
R1
cs
U c(s)
U r (s)
1
Ls
U 1(s)
I 2 ( s )
I (s)
R1 U 1 ( s )
1 R2
U c (s)
I2(s) 1 cs
U c (s)
课后练习二
R1 U 1 ( s )
课后练习三
求传递函数 C(s) ; E(s) ; C(s) ; E(s) R(s) R(s) N(s) N(s)
R(s)
E (s) G1
G2
N (s)
G3
C (s)
R(s)
G3 (s)
E (s)
G1 ( s )
c(s) G1G2G3 G2G3 ; E(s) 1 G2 G2G3 R(s) 1 G2 G1G2G3 R(s) 1 G2 G1G2G3 c(s) G3(1 G2) ; E(s) G3(1 G2) N (s) 1 G2 G1G2G3 N (s) 1 G2 G1G2G3
求取过程
q1(t)
确定系统的输入和输出
C d建hd(立tt) 原 始q1(方t) 程 q组2(t); q2(t) α h(t); h(t)
q2 (t )q2Βιβλιοθήκη (t线) 性α模h型(t线) 性化
q2 (t)
q20 (t)
dq2 (t) dt
q20 (t) [h(t) h0 (t)]
q2 (t)
q20 (t)
解开铰链为独立回路!! 方法:引出点往一起移动,或和点往一起移动。
等效变换应用举例2
G3
R(s) G1
C(s)
G2
H1 H2
G(s) C(s)
G1G2 G1 G1G2H1 G2G3
R(s) 1 G1G2H2 G2H1 G1H2 G1G2H1H2
化整为零!! 方法:消除独立的串联、并联和反馈回路
3、数学模型存在的共性是系统性能仿真研究的理论依据。
无源电网络模型实例
解题步骤及求取过程
确定图示无源的网络的输入ur(t)和输出uc(t) ;
依据回路电压定律,设置中间变量回路电流i(t),从输入到输出建立原
始微分方程组;
L
di(t) dt
Ri(t)
1 C
i(t)dt ur (t)
方法四举例
系统单位阶跃输入及零初始条件下的输出响应为:
c(t) 1 et e2t
求传递函数。
c(t) C(s) 1 1 1 s s 1 s 2
r(t) R(s) 1
s
C(s) G(s) R(s)
G(s)
s2 s2
2s 3s
2 2
第四节 动态结构图(方框图)
N(s)
方框图的组成
ML Ja
Uf
if
求取过程
电网络平衡方程
La
dIa dt
RaIa
Ea
Ua
电动势平衡方程 Ea Keω
机械平衡方程 转矩平衡方程
Ja
dω dt
Ma
ML
Ma KCIa
JaLa KC
d2ω dt 2
JaR a KC
dω dt
Keω Ua
(空载Ml=0)
液位系统线性化模型求取应用实例
f作dθ用力矩=反作用力矩 dt
;
∑M = J a
角 输求位 入取移 动过方力程程矩:MJf;dd2t输2θ出 f物dd体θt 旋 M转f 角度θ或M角f 速度ω。
f
角速度方程:J
dω dt
fω
Mf
直流电动机系统实例
解题依据
Ra
La
Ia
基尔霍夫定律;
Ma
运动学定律;
Ua
Ea
直流发电机相关定律。
Qc (s) Qr (s)
R1R 2C1C 2s 2
1 (R1C1 R2C2
R2C1)s
1
注意:
G(s)
H2 (s) Qr (s)
R1R 2C1C 2s 2
R2 (R1C1 R2C2
R2C1)s
1
负载效应!
方解题法过程:三举例
L
R2
C
ur
u1
R1
uc
_
_
_
G(s)
Uc (s) Ur (s)
第二章 控制系统的数学模型
(本章五次课)
第一节 基本概念
单元内容总结
第二节 微分方程的建立
第三节 传递函数
第四节 动态结构图(方框图)
第五节 动态结构图的等效变换求传递函数
第六节 信号流图和梅逊增益公式
第七节 控制系统的典型传递函数
第八节 典型环节的传递函数
第一节 基本概念
一、控制系统数学模型的定义 描述系统输入与输出动态关系的数学表达式。
传递函数的求取方法及应用举例
方法一:依据系统微分方程求确定输入/输出间的传递函数 方法二:依据原始方程组代入消元求传递函数 方法三:电网络系统可利用复阻抗的直接求取传递函数 方法四: 依据系统的输入输出信号求传递函数
方法二举例
qr
解题过程:
h1
R1
h2
R2 qc
q0
qr (t) q0 (t) c1h1(t)
R2
习题1 绘制图示电网络的方框图。 求输出电压与输入电压之间的传递函 数。
I(s)
U r (s)