电机计算公式
电机常用计算公式及说明
电机常用计算公式及说明Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流极对数与扭矩的关系n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
电机计算公式
电机计算公式电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流极对数与扭矩的关系n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=0.0172,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知高斯磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ / (N × Ae)B=F/IL u磁导率 pi=3.14 B=uI/2R式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电机功率计算公式
电功率:物理学名词,电流在单位时间内做的功叫做电功率。
是用来表示消耗电能的快慢的物理量,用P表示,它的单位是瓦特(Watt),简称"瓦",符号是W。
作为表示电流做功快慢的物理量,一个用电器功率的大小数值上等于它在1秒内所消耗的电能。
如果在"t"(SI单位为s)这么长的时间内消耗的电能“W”(SI单位为J),那么这个用电器的电功率就是P=W/t(定义式)电功率等于导体两端电压与通过导体电流的乘积。
(P=U·I)。
对于纯电阻电路,计算电功率还可以用公式P=I^2*R 和P=U^2 /R。
每个用电器都有一个正常工作的电压值叫额定电压,用电器在额定电压下正常工作的功率叫做额定功率,用电器在实际电压下工作的功率叫做实际功率。
串联电路:P(电功率)U(电压)I(电流)W(电功)R(电阻)t(时间)电流处处相等I1=I2=I总(电流处处相等且等于总电流)总电压等于各用电器两端电压之和U总=U1+U2(总电压等于各部分电压之和)总电阻等于各电阻之和R总=R1+R2总电功等于各电功之和W总=W1+W2.....+Wx分压原理U1:U2=R1:R2 =P1:P2串联电路比例关系W1:W2=R1:R2=U1:U2 =P1:P2=Q1:Q2总功率等于各功率之和P总=P1+P2.....+Px 或U^2/R1+R2.....+Rx电流与电功率和电压之间的关系:I=P/U额定功率比实际功率等于额定电压比实际电压的平方Pe/Ps=(Ue/Us)的平方并联电路:总电流等于各支路电流之和I总=I1+I2各处电压相等U1=U2=U总总电阻等于各电阻之积:各电阻之和R总=(R1*R2)/(R1+R2)1/R=1/R1+1/R2总电功等于各电功之和W总=W1+W2+......+Wx分流原理I1:I2=R2:R1=W1:W2=P1:P2总功率等于各功率之和P总=P1+P2 或U^2/R总并联电路比例关系I1:I2=P1:P2=R2:R1总功率等于各功率之和P总=P1+P2 或U^2/R总电流的求法:I=P/U⑶同一用电器的电功率W1:W2=R2:R1=I1:I2 =P1:P2=Q1:Q2电压相同时,越串联总功率越小,越并联总功率越大推导:①当电路中只有一个电阻时,总功率为P总=U^2/R②当电路中有两电阻并联或串联时,设电阻相等。
电机功率的计算公式

电机功率的计算公式电机功率是指电机在单位时间内所做的功,通常用瓦特(W)来表示。
电机功率的计算公式是:功率(P)= 电压(V)×电流(I)。
在这个公式中,电压是电机所接收到的电压,单位是伏特(V),电流是电机所消耗的电流,单位是安培(A)。
通过这个公式,我们可以计算出电机的功率,从而了解电机的工作状态和性能。
电机功率的计算公式是基于电学原理和功率的定义推导而来的。
根据电学原理,电压与电流的乘积即为功率,这是由欧姆定律和功率定义公式推导而来的。
因此,电机功率的计算公式是非常基础和重要的公式,它可以帮助我们了解电机的工作状态和性能,对于电机的设计、选择和应用都具有重要的意义。
在实际应用中,我们经常需要根据电机的工作电压和电流来计算电机的功率。
这个公式可以帮助我们了解电机的实际工作情况,从而为电机的设计和应用提供重要的参考依据。
下面我们将详细介绍电机功率计算公式的应用和相关知识。
首先,我们需要了解电机功率计算公式中的电压和电流的含义。
电压是指电机所接收到的电压,它是电机工作的基础,通常由电源提供。
电流是指电机所消耗的电流,它是电机工作时的主要参数,可以反映电机的工作状态和性能。
通过测量电机的电压和电流,我们可以利用功率计算公式来计算电机的功率,从而了解电机的工作情况。
在实际应用中,我们通常需要根据电机的额定电压和额定电流来计算电机的额定功率。
电机的额定电压和额定电流是电机设计时确定的重要参数,它们可以帮助我们了解电机的额定工作状态和性能。
通过电机功率计算公式,我们可以根据电机的额定电压和额定电流来计算电机的额定功率,从而了解电机的额定工作情况。
除了额定功率,我们还可以根据电机的实际工作电压和电流来计算电机的实际功率。
电机的实际工作电压和电流通常会有一定的波动,通过功率计算公式,我们可以根据实际工作电压和电流来计算电机的实际功率,从而了解电机的实际工作情况。
电机功率的计算公式可以帮助我们了解电机的工作状态和性能,对于电机的设计、选择和应用都具有重要的意义。
电机计算公式大全

电机计算公式大全
在电机的计算中,常见的公式包括:
1.电机功率(P)计算公式:
P = V × I
其中,V为电压,单位为伏特(V);I为电流,单位为安培(A)。
2.电机转矩(T)计算公式:
T = K × I × φ
其中,K为定子齿槽数与极对数的比值;I为电流,单位为安培(A);φ为磁通量,单位为韦伯(Wb)。
3.电机转速(n)计算公式:
n = (60 × f) / p
其中,f为电源频率,单位为赫兹(HZ);p为电机极对数。
4.电机效率(η)计算公式:
η = (Pout / Pin) × 100%
其中,Pout为电机输出功率,单位为瓦特(W);Pin为电机输入功率,单位为瓦特(W)。
5.电机绕组数(Z)计算公式:
Z = Kv × Zp
其中,Kv为柱绕组渡漂零时的电枢极低估绕组数;Zp为为正副级间绕组数之积。
此外,根据电机类型和应用领域的不同,还有许多其他的电机计算公式和关系式,例如直流电机、异步电机和步进电机等。
具体计算公式和拓展内容可以根据具体情况和需求进行研究和学习。
电机扭矩功率计算公式表

电机扭矩功率计算公式表一、电机扭矩、功率基本公式。
1. 功率(P)的基本公式。
- 对于直流电机,功率P = UI(其中U为电压,I为电流)。
- 在国际单位制中,对于旋转机械,功率P=ω T(ω为角速度,单位为rad/s;T为扭矩,单位为N· m)。
- 对于交流电机,三相交流电机的功率P=√(3)UIcosφ(其中U为线电压,I为线电流,cosφ为功率因数)。
2. 扭矩(T)的基本公式。
- 根据P = ω T,可得T=(P)/(ω)。
- 由于ω = 2π n(n为转速,单位为r/s),当转速n的单位为r/min时,ω=(2π n)/(60),此时T = (60P)/(2π n)=9.549(P)/(n)二、不同类型电机的扭矩与功率关系推导示例。
1. 直流电机。
- 假设直流电机的输入电压为U,输入电流为I,电枢电阻为R,反电动势为E = C_e¶hi n(C_e为电动势常数,¶hi为磁通,n为转速)。
- 根据基尔霍夫电压定律U = E+IR,可得I=(U - E)/(R)=frac{U - C_e¶hin}{R}。
- 电机的电磁功率P_em=EI = C_e¶hi n×frac{U - C_e¶hi n}{R}。
- 电磁转矩T_em=C_T¶hi I(C_T为转矩常数,且C_T=(60)/(2π)C_e),将I=frac{U - C_e¶hi n}{R}代入可得T_em与n、U等参数的关系。
2. 三相异步电机。
- 三相异步电机的电磁转矩T=frac{3pU_1^2frac{R_2'}{s}}{2πf_1[(R_1+frac{R_2'}{s})^2+(X_1+X_2')^2]}(其中p为极对数,U_1为定子相电压,R_1、X_1为定子电阻和漏电抗,R_2'、X_2'为转子折算电阻和漏电抗,s为转差率,f_1为电源频率)。
电机常用计算公式及说明
电机电流计算:对于交流电三相四线供电而言,线电压就就是380,相电压就就是220,线电压就就是根号3相电压对于电动机而言一个绕组得电压就就就是相电压,导线得电压就就是线电压(指A相B 相C 相之间得电压,一个绕组得电流就就就是相电流,导线得电流就就是线电流当电机星接时:线电流=相电流;线电压二根号3相电压。
三个绕组得尾线相连接,电势为零,所以绕组得电压就就是2 20伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组就就是直接接3 8 0得,导线得电流就就是两个绕组电流得矢量之与功率计算公式P二根号三UI乘功率因数就就是对得用一个钳式电流表卡在A B C任意一个线上测到都就就是线电流极对数与扭矩得关系n = 6 0f/pn:电机转速60:60秒f:我国电流采用50Hz p :电机极对数1对极对数电机转速:3000转/分;2对极对数电机转速:60X 5 0 / 2=1500转/分在输出功率不变得情况下,电机得极对数越多,电机得转速就越低,但它得扭矩就越大。
所以在选用电机时,考虑负载需要多大得起动扭距。
异步电机得转速n二(60f/p) X (1-s),主要与频率与极数有关。
直流电机得转速与极数无关,她得转速主要与电枢得电压、磁通量、及电机得结构有关。
n二(电机电压一电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T二9 5 5 0 *P输岀功率/N转速导线电阻计算公式:铜线得电阻率p二0、0 172,R 二px|_/S(1_=导线长度,单位:米,S=》线截而,单位:mnf)磁通量得计算公式:B为磁感应强度,S为面积。
已知髙斯磁场定律为:①二BS磁场强度得计算公式:H二N X I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈得匝数;I为励磁电流(测量值),单位位A: Le为测试样品得有效磁路长度,单位为m。
磁感应强度计算公式:B = O / (N X Ae) B=F/IL u磁导率pi=3、14 B=uI/2R 式中:B为磁感应强度,单位为Wb/m“2;①为感应磁通(测量值),单位为Wb;N为感应线圈得匝数:Ae为测试样品得有效截面积,单位为nT2。
电机转速和扭矩(转矩)计算公式
电机转速和扭矩(转矩)公式1、电机有个共同的公式,P=MN/9550P为额定功率,M为额定力矩,N为额定转速,所以请确认电机功率和额定转速就可以得出额定力矩大小。
注意P的单位是KW,N的单位是R/MIN(RPM),M的单位是NM2、扭矩和力矩完全是一个概念,是力和力臂长度的乘积,单位NM(牛顿米) 比如一个马达输出扭矩10NM,在离输出轴1M的地方(力臂长度1M),可以得到10N的力;如果在离输出轴10M的地方(力臂长度10M),只能得到1N的力含义:1kg=9.8N 1千克的物体受到地球的吸引力是9.8牛顿。
含义:9.8N·m 推力点垂直作用在离磨盘中心1米的位置上的力为9.8N。
转速公式:n=60f/P(n=转速,f=电源频率,P=磁极对数)扭矩公式:T=9550P/nT是扭矩,单位N·mP是输出功率,单位KWn是电机转速,单位r/min扭矩公式:T=973P/nT是扭矩,单位Kg·mP是输出功率,单位KWn是电机转速,单位r/min力矩、转矩和扭矩在电机中其实是一样的。
一般在同一篇文章或同一本书,上述三个名词只采用一个,很少见到同时采用两个或以上的。
虽然这三个词运用的场合有所区别,但在电机中都是指电机中转子绕组产生的可以用来带动机械负载的驱动“矩”。
所谓“矩”是指作用力和支点与力作用方向相垂直的距离的乘积。
对于杠杆,作用力和支点与力作用方向相垂直的距离的乘积就称为力矩。
对于转动的物体,若将转轴中心看成支点,在转动的物体圆周上的作用力和转轴中心与作用力方向垂直的距离的乘积就称为转矩。
当圆柱形物体,受力而未转动,该物体受力后只存在因扭力而发生的弹性变形,此时的转矩就称为扭矩。
因此,在运行的电机中严格说来只能称为“转矩”。
采用“力矩”或“扭矩”都不太合适。
不过习惯上这三种名称使用的历史都较长至少也有六七十年了,因此也没有人刻意去更正它。
至于力矩、转矩和扭矩的单位一般有两种,就是千克·米(kg·m)和牛顿·米(N·m) 两种,克·米(g·m)只是千克·米(kg·m)千分之一。
电机计算公式

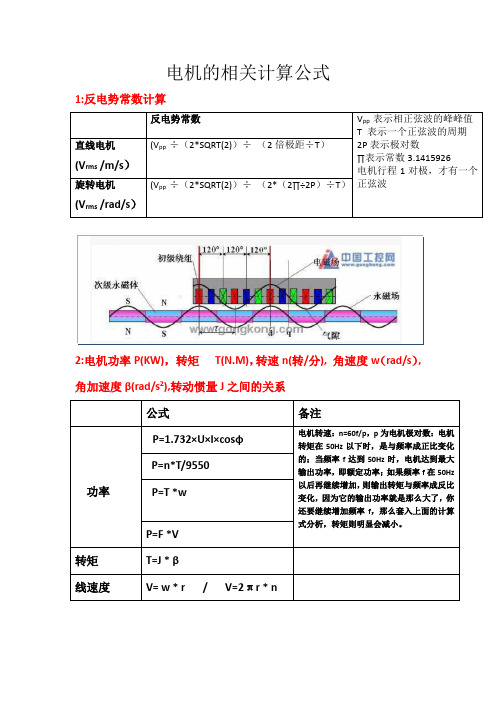
电机计算公式-CAL-FENGHAI.-(YICAI)-Company One1电机的相关计算公式1:反电势常数计算反电势常数V pp 表示相正弦波的峰峰值 T 表示一个正弦波的周期 2P 表示极对数 ∏表示常数电机行程1对极,才有一个正弦波直线电机(V rms /m/s )(V pp ÷(2*SQRT(2))÷ (2倍极距÷T )旋转电机(V rms /rad/s )(V pp ÷(2*SQRT(2))÷ (2*(2∏÷2P )÷T )2:电机功率P(KW),转矩T ,转速n(转/分), 角速度w (rad/s ),角加速度β(rad/s 2),转动惯量J 之间的关系 公式备注功率P=×U×I×cosφ 电机转速:n=60f/p ,p 为电机极对数:电机转矩在50Hz 以下时,是与频率成正比变化的;当频率f 达到50Hz 时,电机达到最大输出功率,即额定功率;如果频率f 在50Hz 以后再继续增加,则输出转矩与频率成反比变化,因为它的输出功率就是那么大了,你还要继续增加频率f ,那么套入上面的计算式分析,转矩则明显会减小。
P=n*T/9550 P=T *wP=F *V 转矩 T=J * β线速度 V= w * r / V=2πr * n3:直流法相电流有效值的计算i a i bic两相等效三相计算:(驱动器跑电流环只有两相电流)P2=2i22R 等效 P3=3i32RP2= P 3 2i22R = 3i32R i2= √(3/2) i34:数字换向信号和反电势之间的关系u,v和w信号用来给转子做初始定位,这三个脉冲互差120°方波信号类似直流无刷电机位置传感器HALL的输出信号,在一个电角度周期,三个信号的输出组成6个状态,每个状态60°电角度。
要使U,V和W信号能判断初始定位,需将U相信号上升沿和电机反电势由负到正过零点位置对齐。
电机功率计算公式

电机功率计算公式电功率计算公式:在纯直流电路中:P=UIP=I²RP=U²/R式中:P---电功率(W),U---电压(V),I----电流(A),R---电阻(Ω).在单相交流电路中:P=UIcosφ式中:cosφ---功率因数,如白炽灯、电炉、电烙铁等可视为电阻性负载,其cosφ=1则P=UIU、I---分别为相电压、电流。
在对称三相交流电路中,不论负载的连接是哪种形式,对称三相负载的平均功率都是:P=√3UIcosφ式中:U、I---分别为线电压、线电流。
cosφ---功率因数,若为三相阻性负载,如三相电炉,cosφ=1则P=√3UI。
一、P=UI的两个同胞兄弟及其应用功率计算公式P=UI联合欧姆定律可患上到以下两个公式:一、由欧姆定律可知,将其代入便患上到电功率的熬头个兄弟公式:(推论:在电压相等的环境下,用电器消耗的功率与其电阻成反比)2、P=I2R 同理,可将U=IR代入P=UI患上到电功率的第二个兄弟公式:P=I2R (推论:在电流相等的环境下,用电器消耗的功率与其电阻成正比)导出公式、P=I2R与公式P=UI就像是三个同胞兄弟,各有自已的独特之处,若能根据实际环境灵活选择,将给我们解题。
根据负载条件选用电机电机轴上有两种负载,一种是转矩负载,另一种是惯量负载。
选用电机时,必须准确计算这些负载,以便确保满足如下条件:§(1).当机床处于非切削工作状态时,在整个速度范围内负载转矩应小于电机的连续额定转矩。
如果在暂停或以非常低的速度运行时,由于摩擦系数增大,使得负载转矩增大并超过电机的额定转矩,电机有可能出现过热。
另一方面,在高速运行时,如果受粘滞性影响,而使转矩增大且超过额定转矩,由于不能获得足够的加速转矩,加速时间常数有可能大大增加。
§(2).最大切削转矩所占时间(负载百分比即“ON”时间)满足所期望的值。
§(3).以希望的时间常数进行加速。
电机选用计算公式

电机选用计算公式
以下是电机选用常见的计算公式:
1.功率公式:功率(P)=电流(I)*电压(U)*功率因数(PF)
-其中,功率因数是指有功功率和视在功率的比值,通常为1,除非应用中有额外的功率因数修正要求。
2. 转速公式:转速(N)= 频率(f)* 极对数(P)* 60s/min
-其中,频率为电网的频率(通常为50Hz或60Hz),极对数是电机的极对数,指一个极对上的磁极数。
3.对应电压公式:电压(U)=电压等级(V)/根号3
-微型电机的通用电压等级为110V或220V,工业用大型电机的通用电压等级为380V。
4.电流公式:电流(I)=功率(P)/(电压(U)*功率因数(PF))
-根据功率和电压计算电流,功率因数同样需要考虑。
5.额定转矩公式:额定转矩(T)=9.55*功率(P)/额定转速(N)
-该公式适用于电机在额定转速下的额定工作转矩计算。
6.额定电流公式:额定电流(I)=10^3*额定功率(P)/(额定电压(U)*功率因数(PF))
-该公式适用于计算电机在额定电压下的额定工作电流。
在实际应用中,除了以上公式,还需要考虑一些实际情况以进行合理的电机选用,如:
-负载特性:负载的扭矩特性和启动特性需要考虑,以确保电机能够满足负载要求。
-环境条件:环境温度、湿度等因素需要考虑,选择适合环境条件的电机。
-电机类型:根据应用场景和需要选择适合的电机类型,比如直流电机、交流电机、步进电机等。
最终,根据计算公式和实际考虑因素,可以选择到合适的电机,并确保其能够正常运行和满足需求。
电机转速和扭矩(转矩)计算公式
电机转速和扭矩(转矩)公式1、电机有个共同的公式,P=MN/9550P为额定功率,M为额定力矩,N为额定转速,所以请确认电机功率和额定转速就可以得出额定力矩大小。
注意P的单位是KW,N的单位是R/MIN(RPM),M的单位是NM2、扭矩和力矩完全是一个概念,是力和力臂长度的乘积,单位NM(牛顿米) 比如一个马达输出扭矩10NM,在离输出轴1M的地方(力臂长度1M),可以得到10N的力;如果在离输出轴10M的地方(力臂长度10M),只能得到1N的力含义:1kg=9.8N 1千克的物体受到地球的吸引力是9.8牛顿。
含义:9.8N·m 推力点垂直作用在离磨盘中心1米的位置上的力为9.8N。
转速公式:n=60f/P(n=转速,f=电源频率,P=磁极对数)扭矩公式:T=9550P/nT是扭矩,单位N·mP是输出功率,单位KWn是电机转速,单位r/min扭矩公式:T=973P/nT是扭矩,单位Kg·mP是输出功率,单位KWn是电机转速,单位r/min力矩、转矩和扭矩在电机中其实是一样的。
一般在同一篇文章或同一本书,上述三个名词只采用一个,很少见到同时采用两个或以上的。
虽然这三个词运用的场合有所区别,但在电机中都是指电机中转子绕组产生的可以用来带动机械负载的驱动“矩”。
所谓“矩”是指作用力和支点与力作用方向相垂直的距离的乘积。
对于杠杆,作用力和支点与力作用方向相垂直的距离的乘积就称为力矩。
对于转动的物体,若将转轴中心看成支点,在转动的物体圆周上的作用力和转轴中心与作用力方向垂直的距离的乘积就称为转矩。
当圆柱形物体,受力而未转动,该物体受力后只存在因扭力而发生的弹性变形,此时的转矩就称为扭矩。
因此,在运行的电机中严格说来只能称为“转矩”。
采用“力矩”或“扭矩”都不太合适。
不过习惯上这三种名称使用的历史都较长至少也有六七十年了,因此也没有人刻意去更正它。
至于力矩、转矩和扭矩的单位一般有两种,就是千克·米(kg·m)和牛顿·米(N·m) 两种,克·米(g·m)只是千克·米(kg·m)千分之一。
电机计算公式
电机的相关计算公式1:反电势常数计算2:电机功率P(KW),转矩T(N.M),转速n(转/分), 角速度w (rad/s ),角加速度β(rad/s 2),转动惯量J 之间的关系3:直流法相电流有效值的计算两相等效三相计算:(驱动器跑电流环只有两相电流) P2=2i22R 等效P3=3i32RP2= P32i22R = 3i32R i2= √(3/2) i34:数字换向信号和反电势之间的关系u,v和w信号用来给转子做初始定位,这三个脉冲互差120°方波信号类似直流无刷电机位置传感器HALL的输出信号,在一个电角度周期,三个信号的输出组成6个状态,每个状态60°电角度。
要使U,V和W信号能判断初始定位,需将U相信号上升沿和电机反电势由负到正过零点位置对齐。
一般说来,根据编码器产生的脉冲方式不同,可分为增量式,绝对是和混合式三大类,UVW是混合式码盘的位置信号,混合式码盘在传统的增量式码盘的基础上增加了一组用于检测伺服电机磁极位置的码道。
UVW三相脉冲信号彼此相差120°,每转的脉冲个数与电机的极对数一致,电机启动前,通过该信号估算电机磁极的位置,一旦电机旋转起来,通过输出的增量式部分信号可以精确的检测出转子的位置值。
5:电机动力线U,V,W 信号规则用双通道示道器一端接U相,另一端接V相,公共端接W相。
逆时针方向旋转电机,超前相为U相。
波形如下:U相为橙色V相为蓝色示波器正端接U相,负端接V相,逆时针转动电机,U-V相反电动势与编码器U相霍尔输出关系波形如下::U-V相反电动势与编码器V相霍尔输出关系波形:U-V相反电动势与编码器W相霍尔输出关系波形:。
电机常用计算公式及说明

电机常用计算公式及说明电机作为电能转换为机械能的关键设备,广泛应用于家用电器、工业生产等领域。
在设计、运行和维护电机时,常常需要进行一些计算。
本文将介绍一些电机常用的计算公式及其说明。
1.功率计算公式电机的功率是指电能转换为机械能的速度,常用单位是瓦特(W)。
功率计算公式如下:功率(P)=电压(U)×电流(I)×功率因数(PF)其中,电压是电机上的电压,电流是电机的电流,功率因数是表征电机电性能的一个参数。
2.转速计算公式电机的转速是指电机转动的速度,常用单位是转/分钟(RPM)。
转速计算公式如下:转速(N)=60×频率(f)/极对数(P)其中,频率是电机供电频率,极对数是电机磁极对的个数。
3.额定电流计算公式额定电流是指电机在额定电压下的工作电流,常用单位是安培(A)。
额定电流计算公式如下:额定电流(I)=额定功率(P)/额定电压(U)4.额定转矩计算公式额定转矩是指电机在额定工况下输出的转矩,常用单位是牛顿·米(N·m)。
额定转矩计算公式如下:额定转矩(T)=9.55×额定功率(P)/额定转速(N)其中,9.55是转换常数。
5.转差百分比计算公式转差百分比是指电机转速与额定转速之间的差异,用来反映电机的负载能力。
转差百分比计算公式如下:转差百分比(S)=(额定转速(N)-实际转速(N'))/额定转速(N)6.功率因数计算公式功率因数是电机电能转换为机械能的效率指标,用来衡量电机的能耗程度。
功率因数计算公式如下:功率因数(PF)=有功功率(P)/视在功率(S)其中,有功功率是电机真正传递给负载的功率,视在功率是电机传输的总功率。
7.效率计算公式电机的效率是指电能转换为机械能的有效程度,常用百分比表示。
效率计算公式如下:效率(η)= 有功输出功率(P)/ 输入电功率(P input)其中,有功输出功率是电机实际输出的功率,输入电功率是电机输入的总功率。
电机的计算公式大全

电机的计算公式大全一、直流电机。
1. 感应电动势(E)- 对于直流发电机,E = C_evarPhi n,其中C_e为电动势常数(C_e=(pN)/(60a),p为磁极对数,N为电枢绕组总导体数,a为电枢绕组并联支路对数),varPhi为每极磁通(单位为Wb),n为电机转速(单位为r/min)。
- 对于直流电动机,该公式同样适用,感应电动势为反电动势。
2. 电磁转矩(T)- T = C_TvarPhi I_a,其中C_T为转矩常数(C_T=(pN)/(2π a)),I_a为电枢电流(单位为A)。
3. 直流电动机的转速公式。
- 根据E = C_evarPhi n和U = E+I_aR_a(U为电枢电压,R_a为电枢电阻),可得n=frac{U - I_aR_a}{C_evarPhi}。
二、异步电动机。
1. 转差率(s)- s=frac{n_1-n}{n_1},其中n_1为同步转速(n_1=(60f)/(p),f为电源频率,单位为Hz),n为电动机的实际转速。
2. 电磁转矩(T)- 转矩的实用公式T = frac{2T_m}{(s)/(s_m)+frac{s_m}{s}},其中T_m为最大转矩,s_m为临界转差率。
- 最大转矩T_m=frac{m_1pU_1^2}{4π f_1X_20}(m_1为定子相数,U_1为定子相电压,X_20为转子静止时的每相漏电抗)。
3. 定子电流(I_1)- 根据等效电路,I_1=frac{U_1}{Ż_1+frac{Ż_2'}{(1 - s)/(s)}},其中Ż_1为定子阻抗,Ż_2'为转子折算到定子侧的阻抗。
三、同步电机。
1. 同步转速(n_1)- n_1=(60f)/(p),与异步电机的同步转速公式相同。
2. 电磁功率(P_em)- 对于隐极同步电机P_em=mfrac{E_0U}{X_s}sinθ,其中m为相数,E_0为空载电动势,U为端电压,X_s为同步电抗,θ为功角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机的相关计算公式1:反电势常数计算
反电势常数V pp 表示相正弦波的峰峰值
T 表示一个正弦波的周期
2P表示极对数
∏表示常数3、1415926
电机行程1对极,才有一个正
弦波
直线电机
(V rms /m/s)
(V pp ÷(2*SQRT(2))÷(2倍极距÷T)
旋转电机
(V rms /rad/s)
(V pp ÷(2*SQRT(2))÷(2*(2∏÷2P)÷T)
2:电机功率P(KW),转矩T(N、M),转速n(转/分), 角速度w(rad/s),角加
速度β(rad/s2),转动惯量J之间的关系
公式备注
功率
P=1、732×U×I×cosφ电机转速:n=60f/p,p为电机极对数:电机转
矩在50Hz以下时,就是与频率成正比变化
的;当频率f达到50Hz时,电机达到最大输出
功率,即额定功率;如果频率f在50Hz以后再
继续增加,则输出转矩与频率成反比变化,因
为它的输出功率就就是那么大了,您还要继
续增加频率f,那么套入上面的计算式分析,
转矩则明显会减小。
P=n*T/9550
P=T *w
P=F *V
转矩T=J * β
线速度V= w * r / V=2πr * n
3:直流法相电流有效值的计算
两相等效三相计算:(驱动器跑电流环只有两相电流) P 2=2i 22R 等效 P 3=3i 32R
P 2= P 3
2i 22R = 3i 32R i 2= √(3/2) i 3
4:数字换向信号与反电势之间的关系
u,v 与w 信号用来给转子做初始定位,这三个脉冲互差120°方波信号类似直流无
刷电机位置传感器HALL 的输出信号,在一个电角度周期,三个信号的输出组成6个状态,每个状态60°电角度。
要使U,V 与W 信号能判断初始定位,需将U 相信号上升沿与电机反电势由负到正过零点位置对齐。
一般说来,根据编码器产生的脉冲方式不同,可分为增量式,绝对就是与混合式三
i a i b
ic
大类,UVW就是混合式码盘的位置信号,混合式码盘在传统的增量式码盘的基础上增加了一组用于检测伺服电机磁极位置的码道。
UVW三相脉冲信号彼此相差120°,每转的脉冲个数与电机的极对数一致,电机启动前,通过该信号估算电机磁极的位置,一旦电机旋转起来,通过输出的增量式部分信号可以精确的检测出转子的位置值。
5:电机动力线U,V,W 信号规则
用双通道示道器一端接U相,另一端接V相,公共端接W相。
逆时针方向旋转电机,超前相为U相。
波形如下:
U相为橙色V相为蓝色
示波器正端接U相,负端接V相,逆时针转动电机,U-V相反电动势与编码器U相霍尔输出关系波形如下::
U-V相反电动势与编码器V相霍尔输出关系波形:
U-V相反电动势与编码器W相霍尔输出关系波形:
060120180240300 U011100
V000111
W110001。