海洋平台设备图解
海洋平台结构作业——自升式海洋平台升降结构

常见自升式海洋平台升降结构对比分析班级:学号:姓名:目录一、自升式平台简介 (3)二、现有常见升降结构 (4)1、圆柱型桩腿一单环梁液压升降装置 (4)2、方壳型桩腿—双环梁液压升降装置 (6)3、桁架型桩腿一齿轮齿条升降装置 (7)三、升降系统的对比 (8)1、桩腿结构形式对比 (8)2、触底形式对比 (9)3、升降装置对比 (10)4、动力源对比 (11)一、自升式平台简介自升式平台是一种海上活动式钻井装备,目前是我国海洋石油勘探中使用最多的一种钻井平台,由于其作业稳定性好和定位能力强,在大陆架海域的油气勘探开发中居极其重要的地位。
自升式平台主要由平台主体、桩腿、升降锁紧装置、钻井装置(包括动力设备和起重设备)以及生活楼(包括直升飞机平台)等组成。
平台在工作时用升降装置将平台主体提升到海面以上,使之免受海浪冲击,依靠桩腿的支撑稳定的站立在海底进行钻井作业。
完成任务后,降下平台主体到海面,拔起桩腿并将其升至拖航位置,即可拖航到下一个井位作业。
因此,支撑升降系统的结构对自升式海洋工作平台的安全有着至关重要的作用。
自升式平台的工作状态如图一所示。
图一二、现有常见升降结构支撑升降系统作为自升式平台中的核心部分,在平台的设计建造中历来受到高度重视,其性能的优劣直接影响到平台的安全和使用效果。
最常用的升降装置是齿轮齿条式和顶升液压缸式。
具体可见下表壳体桩腿是封闭型桩腿,其桩腿截面有圆形和方形两种形式;桁架式桩腿截面有三角形和四方形两种形式。
不同截面形状的桁架式和壳体式桩腿与不同类型的升降驱动方案相互组合,衍生出多种能够实现升降平台功能的支撑升降系统类型。
1、圆柱型桩腿一单环梁液压升降装置销子、销孔和项升液压缸是一种升降装置。
系统原理图如图二。
图二每一桩腿有两组液压动作的插销和一组顶升液压缸。
当装在环梁上的一组环梁销插入到桩腿的销孔中时,一组顶升液压缸的同步动作即可使环梁及销子带动桩腿(或平台主体)升降一个节距,然后进行换手:将锁紧销推入到桩腿的销孔中,退出环梁销,液压缸和环梁复位,下一个工作循环开始。
海洋平台图文并貌介绍
海洋平台海洋平台概述海洋平台是在海洋上进行作业的场所,是海洋石油钻探与生产所需的平台。
海洋平台从功能上分有钻井平台、生产平台、生活服务平台、储油平台等。
从型式及原理上分有,桩基式、坐底式、重力式、自升式、半潜式、张力腿式、竖筒平台等多种,桩基式、坐底式、重力式平台用于浅水海域,而从世界范围来讲浅水海域的海洋油气资源已很有限,各国和石油公司已将目光瞄准深海油田,自升式、半潜式、张力腿式、竖筒式等类型的海洋平台成为目前海洋工程领域的热点,下面主要介绍这四种类型的平台。
1 自升式钻井平台Jack-up Platform(Self-elevating Platform)自升式平台由平台体和可以升降的桩腿组成,作业时桩腿支撑在海底,平台升起离开水面一定高度,因此只有桩腿受到波浪和海流的作用,受到的外界负荷较小。
自升式平台的作业水深按作业水域的要求确定,但通常不超过90m。
大多数自升式平台是非自航平台。
拖航时,平台浮在水面上,桩腿高高升起,此时平台如同一艘驳船,应符合各种规则、规范对非自航船舶在海上拖航时,包括完整稳性和破舱稳性及干舷等各种要求。
到达井位后,桩腿下降插入海底,平台升起,进行钻井作业。
现今的自升式平台桩腿数为3根或4根,深水平台采用3条桁架式桩腿。
自升式平台的升降结构主要有两种型式,即液压插销式升降结构和齿轮条式升降结构。
自升式平台的布置与其形状有关,三角形平台的井架总是布置在某一边的中部,而生活区布置在与该边相对的角端,直升机平台则设在靠近生活区附近,矩形平台则将井架与生活区布置在相对的两端边处。
井架及其底座通常为可移动式,拖航时移至平台中间以减少平台的纵倾。
新型的自升式平台,有的将井架及其底座设置在伸至平台外面的悬臂梁上。
由于自升式平台可适用于不同海底土壤条件和较大的水深范围,移位灵活方便,拖船可以轻松把它从一个地方拖移到另一个地方,因而得到了广泛的应用。
目前,在海上移动式钻井平台中它仍占绝大多数。
海洋平台概述
Rig Name: GSF Arctic III Delivery Year:1984 Water Depth:1800ft Drilling Depth:25,000ft Semi-sub Generation: 3 海O洋w平ne台r:概Tr述ansocean Inc.
Rig Name: Ocean Baroness Year Built:1973 Upgrade:2001-Keppel FELS Water Depth:6500ft Drilling Depth:35,000ft Owner: Diamond Offshore
海洋平台概述
• 2. 移动式平台又称活动平台,它是为适应勘探、施
工、维修等海上作业必须经常更换地点的需要而发 展起来的。现有的活动平台分坐底式、自升式、半 潜式、船式、牵索塔、张力腿式等等很多种不同的 结构形式。由于机动性能好,故一般均用于钻井。
海洋平台概述
2.1 钻井船
钻井船是设有钻井设备,能在水面上钻井和移位的船,也属于移动式(船式)钻井装 置。较早的钻井船是用驳船、矿砂船、油船、供应船等改装的,现在已有专为钻井设 计的专用船。目前,已有半潜、坐底、自升、双体、多体等类型。钻井船在钻井装置 中机动性最好,但钻井性能却比较差。钻井船与半潜式钻井平台一样,钻井时浮在水 面。井架一般都设在船的中部,以减小船体摇荡对钻井工作的影响,且多数具有自航 能力。钻井船在波浪中的垂荡要比半潜式平台大,有时要被迫停钻,增加停工时间, 所以更需采用垂荡补偿器来缓和垂荡运动。钻井船适于深水作业,但需要适当的动力 定位设施。钻井船适用于波高小、风速低的海区。它可以在3000~4000 m水深的海底 上进行探查,钻深可达到10000多米,掌握海底油、气层的位置、特性、规模、贮量, 提供生产能力等 。
海洋石油平台设备介绍

柱塞泵为往复泵的一种, 结构通常有两部分组成,一 部分是直接输送液体,把机 械能转换为液体压力能的液 力端,另一部分是将原动机 的能量传给液力端的传动端。 依靠柱塞的往复运动,使工 作室的容积周期的变化,使 液体不断地被吸入和排出完 成工作。
平台上的柱塞泵一般包 括:闭排泵和压井泵,化学 注入泵。
齿轮泵
齿轮泵工作原理图
螺杆泵
螺杆泵的主要组成部分是螺杆及与之相配套的衬套。
由于密封腔室的不断形成、推移和消失,使混合液通过一个一个密 封腔室,从吸入端推挤到排出端,压力不断升高。由于密封腔室的推移 速度是恒定的,理论上螺杆泵的流量是非常均匀的,不存在流量波动。
由于螺杆泵的衬套由橡胶制成,螺杆与衬套间的相对运动为滚动加 滑动,为高粘、高含砂、高含气原油的输送创造了有利的条件,加之螺 杆泵的运动件少,过流面积大,油流扰动小,使其能在高粘原油中高效 工作。
Welcome to
海洋平台结构设计-第章--平台甲板结构及附属设施设计课件 (一)

海洋平台结构设计-第章--平台甲板结构及附
属设施设计课件 (一)
海洋平台是用于在海洋上进行能源开发和科学研究的重要工程,平台
甲板结构及附属设施设计是平台结构设计的重要组成部分。
关于海洋
平台结构设计-第章--平台甲板结构及附属设施设计课件,本文进行了
一些总结和归纳。
首先,平台甲板结构应该具备一定的牢固性和承载能力,才能够稳定
的维持平台的使用效率。
对于这一点,要考虑到平台使用环境的不同,如海面的波动大小、海浪的冲击力等等因素。
因此,在平台甲板结构
的设计上,需要充分考虑材料的选择以及各组件的连接方式,确保平
台甲板的刚性和稳定性。
其次,附属设施包括了供应设施、监控设施、消防设施以及生活设施等。
这些设施不仅可以方便平台操作与使用,还能够应对突发事件,
保证员工和环境的安全。
其中,监控设施和消防设施尤为重要,监控
设施可以对平台所在区域进行实时监测,发现危险情况及时处理,而
消防设施则可以有效的防范平台火灾风险,降低平台安全事故发生的
风险。
最后,平台甲板结构和附属设施设计都需要考虑到舒适性,特别是生
活设施的设计,比如宿舍,餐厅,卫生间等。
这些设施的设计需要符
合人性化的标准,不仅要让员工感到舒适便捷,同时还需要符合相关
的安全标准。
综上所述,平台甲板结构及附属设施设计课程为海洋平台设计提供了
有益的指导。
在平台设计中,需要充分考虑到海洋环境的特殊性,同
时为员工提供优秀的工作和生活条件,保证平台在安全、健康和舒适的条件下稳定的发挥出其使用效率。
海洋工程各种平台分类与介绍
海洋工程各种平台分类与介绍下面图文并茂简单介绍下海洋平台分类、钻井船、FPSO SEVAN平台,纯属胡扯,各位看官不要喷我,海洋平台简单可以分为以下2大类(1)固定式平台:导管架式平台重力式平台(2)移动式平台: 坐底式平台自升式平台半潜式平台张力腿式平台牵索塔式平台SPAR平台第一个导管架平台(Jacket),适用于浅近海。
导管架平台可以看作最原始,最直接的将钻井设备与海底连接起来的措施。
钢桩穿过导管打入海底,并由若干根导管组合成导管架。
导管架先在陆地预制好后,拖运到海上安装就位,然后顺着导管打桩,桩是打一节接一节的,最后在桩与导管之间的环形空隙里灌入水泥浆,使桩与导管连成一体固定于海底。
重力式(混凝土)钻井平台: 混凝土重力式平台的底部通常是一个巨大的混凝土基础(沉箱),用三个或四个空心的混凝土立柱支撑着甲板结构,在平台底部的巨大基础中被分隔为许多圆筒型的贮油舱和压载舱,这种平台的重量可达数十万吨,正是依靠自身的巨大重量,平台直接置于海底。
坐底式钻井平台是早期在浅水区域作业的一种移动式钻井平台。
平台分本体与下体(即浮箱),由若干立柱连接平台本体与下体,平台上设置钻井设备、工作场所、储藏与生活舱室等。
钻井前在下体中灌入压载水使之沉底,下体在坐底时支承平台的全部重量,而此时平台本体仍需高出水面,不受波浪冲击。
自升式钻井平台(Jack-up)又称甲板升降式或桩腿式平台。
这种石油钻井装置在浮在水面的平台上装载钻井机械、动力、器材、居住设备以及若干可升降的桩腿,钻井时桩腿着底,平台则沿桩腿升离海面一定高度;移位时平台降至水面,桩腿升起,平台就像驳船,可由拖轮把它拖移到新的井位。
半潜式平台(Semi)是大部分浮体沉没于水中的一种小水线面的移动式平台,它从坐底式平台演变而来,由平台本体、立柱和下体或浮箱组成。
此外,在下体与下体、立柱与立柱、立柱与平台本体之间还有一些支撑与斜撑连接,在下体问的连接支撑一般都设在下体的上方,这样,当平台移位时,可使它位于水线之上,以减小阻力;平台上设有钻井机械设备、器材和生活舱室等,供钻井工作用。
海洋平台结构设计课件第四章 平台甲板结构及附属设施设计
2.荷载分配与计算简图
1)甲板铺板的荷载分配与计算简图
次梁与主梁将铺板分为许多区格,各区格板按受力分为两边支承板和四边支承
板 当 l2 l1 2 时,假定板两边固定在次梁上,简化为两边支承板
当 l2 l1 2 时,简化为四边支承板,两个方向的内力必须都要计算
取单位宽度板计算板上的内力,最大弯矩为:
e.实际工程中,作用在主梁和次梁上的集中荷载、三角形荷载、梯形荷载、 均布荷载均可按公式简化为等量均布荷载
3.上部结构计算简图的选取
对于导管架平台,根据吊装和构造的实际特点,进行受力分析时,通常 将上部结构与下部结构分开考虑 初步设计阶段,常把平台上部结构简化为若干平面结构进行受力分析
右图中,上下层甲板主梁和层间 立柱组成一个多跨封闭的横向框架
第四章 平台甲板结构及附属设施设计
1
本章主要内容
第一节 甲板结构的计算模型 第二节 甲板结构的设计 第三节 附属设施设计
平台甲板结构及附属设施设计
按承载方式(柱或桁架)与上下层甲板的连接形式,对支撑结构的结构型式分类
空腹式框架结构
包括梁和立柱等构件。甲板间通过立柱 相连。此结构层间开阔,设备维修和安 装方便,用钢量省;结构整体稳定性差
• 第二节 甲板结构的设计
上部结构典型计算单元:简支梁、多跨连续梁、刚架结构、排架结构、桁架结构 单个构件应按最不利组合取设计荷载来计算截面内力,由此选择构件的经济截面
平台甲板铺板厚度确定
甲板结构的设计
梁格的布置与连接型式 梁与立柱的内力计算和截面选择
一、平台甲板铺板厚度确定
目前海上平台甲板铺板普遍采用钢板
刚性连接
简支连接
支承结构的桩顶
2.上部结构支座构造与简化
海上平台设备图解
平台设备图解!bull nose用来封住casing string的钢板(焊在下端部),球面形或半椭球形,像个牛鼻子。
有的直接用个带螺纹的塞子塞住的。
好像是用来做泥浆循环实验。
cat head在drill floor上的cat head用来辅助吊sand line的,如下图红色的cat head,顶部的轮子下面有个液压泵,旁边的轮子可以像合页一样转动,用来调整拉拽的角度。
还应该有根钢丝,一端绕过旁边的轮子和顶部的轮子,固定在另一端(和旁边轮子对过的一边),使用的时候顶部的轮子在液压泵的推动下向上移动,钢丝的来拽距离是上面轮子移动距离的两倍。
这种形式的cathead目前广泛应用在平台和钻井船上。
cat walk在船上的catwalk大家都知道的吧,在平台上也有类似的结构。
在钻井系统中指的是和vee-door下面的pipe ramp链接的窄长平台,用来运送钻井所需的工具、管子等这个图是陆地上catwalk。
图中是工人在上面选管子准备运到drill floor上。
finger board在derrick上用来扶持接好的drill pipe和coller的。
因形状像人的手指而得名。
这是陆地上的derrick。
在平台和钻井船上,finger board是在derrick的里面的。
见下图这些大手指上还有些小手指,管子运过来的时候会自动打开,(图中正在打开,管子放好后会关闭)有了这套系统,就不需要monkey board了。
这套系统既节省的大量时间,又不需要很多劳动力,据说可以提高25%的效率,而造价只占整个rig的1%。
fox holefox hole的作用类似mouse hole,都是放管子准备接起来的,区别在于他有slips,还有在结构方面,是下沉的,而且需要beam支撑,安装了slips后基本和drill floor平齐了。
一般是两个并排的,有的也有三个。
为什么要有slips?有个这个可以实现自动化,它固定了管子的位置,roughneck可以准确的找到管子的位置,进行接管子。
《海洋平台设计》课件

总结词
浮式、自重轻、钢材、适用于深水
VS
详细描述
浮式海洋平台是一种浮体结构,上部结构 通常采用钢材制造,自重较轻,适用于深 水海域。其设计需要考虑风、浪、流等自 然条件的影响,同时要保证平台的稳定性 、强度和安全性。浮式海洋平台可以通过 锚链或浮筒等方式进行固定,具有较高的 灵活性,适用于不同海域条件下的使用。
06
海洋平台设计发展趋势与展望
数字化设计技术的应用
数字化建模
使用计算机辅助设计(CAD)软件进行建模,提 高设计效率和准确性。
虚拟现实技术
利用虚拟现实技术进行海洋平台设计的可视化展 示,方便设计师和客户进行交流和评估。
数字孪生
通过数字孪生技术,实现对海洋平台的全生命周 期管理,包括设计、建造、运营和维护。
案例二:重力式海洋平台设计
总结词
固定式、重力支撑、混凝土、适用于浅水
详细描述
重力式海洋平台是一种固定式海洋平台,依靠自身重量稳定地支撑在海底,上部结构通常采用混凝土材料。这种 平台适用于浅水海域,设计时需要考虑海底地质条件、自然环境等因素,同时要保证平台的结构安全性和稳定性 。
案例三:浮式海洋平台设计
概述 美国海洋平台设计规范与标准是 指在美国范围内被广泛接受和应 用的海洋平台设计规范和标准。
ABS规范与标准 ABS规范与标准是美国船级社制 定的海洋平台设计规范,包括《 海洋平台结构设计》、《海洋平 台机械设计》等。
分类 美国海洋平台设计规范与标准主 要分为两类,即美国石油学会( API)和美国船级社(ABS)。
《海洋平台设计》课件
汇报人: 日期:
目录
• 海洋平台概述 • 海洋平台设计基础 • 海洋平台设计流程 • 海洋平台设计规范与标准 • 海洋平台设计案例分析 • 海洋平台设计发展趋势与展望
海洋平台结构设计课件第三章 导管架平台总体设计

3. 甲板结构
板
梁
桁架(立柱)
甲板结构:为海上油气田开发和其它海洋开发提供足够的使用空间,
用来布置各种设施和设备。
4. 设施和设备模块
陆地制作模块
海上
甲板结构
按工艺流程组装模块
现代平台设计通常按照起重机的允许最大吊装能力和工艺流程要求, 将上部设施与设备分成很多模块。
导管架平台
井 口 平 台
生 产 处 理 平 台
反复进行工艺布置与结构选型的过程平台使用参数施工参数海洋环境参数海底地质参数第一节设计参数平台的用途工艺要求施工手段满足施工要求的自然环境条件工作环境参数极端环境参数工程地质参数适宜的持力层1使用年限2平台设置的位置及该位置的水深3是否有人居住若有人居住居住人数人员上下平台方法及紧急状态的撤离方法4平台工艺布置要求及处理方法5供应船的尺度停靠方式直升飞机的型号及直升飞机停泊场的布置起重设备能力及数量6油气井的数目间距7保证工作人员和设备的安全防止污染减少振动及防火的措施一平台使用参数1要求预制场地有足够的工作面积2供水供电方便充足能正常进行构件制造3要求路上交通有铁路公路相通水路有码头通航能够保证大量材料运进和大型构件运出4要求有足够的工作船和起重机具进行运输安装5平台制造厂技术水平能满足平台制造要求6要求从制造场地到平台服役海域的航线有足够的航行水深二施工参数1海洋环境
• 三、海洋环境参数
(1)海洋环境:
a. 风、波浪、潮汐、海流、海冰、地震、海啸 b. 风、雨、雪、雾、霜、温度、湿度 c. 地基土壤、腐蚀性海水、海生物附着、盐度 (2)环境参数包括工作环境参数、极端环境参数 (3)工作环境参数:平台在施工和使用期间经常出现的环境参数,以保 证平台能正常施工和生产作业为标准 (4)极端环境参数:平台在使用年限内,极少出现的恶劣环境参数,作 为保证平台生存标准。所选用的荷载重现期均不小于50年
海洋平台——自升式
桩脚端部结构的主要形式有桩靴和沉淀。
桁架式桩腿
桩腿下端部结构形式
桩靴结构
沉 淀 结 构
(结 固合 定式 式结 )构
(结 固合 定式 式结 )构
升降机构
升降装置常用的有电动液压式和电动齿轮 条式。
主体 桩腿 升降装置
主体结构
从形状上分有三角形、矩形、五角形等。
自升式平台横剖面结构(矩形)
自升式平台中纵剖面结构(矩形)
上甲板平面结构
桩腿结构
桩腿的作用主要是在平台主体升起后支承 平台的全部重量,并把载荷传至海底。
桩腿一般要承担传递轴向载荷、水平载荷、 弯曲力矩和升降过程中的局部载荷。
Harbin Engineering Universityyour attention!
电动液压式升降机构是利用液压缸中活塞 杆的伸缩带动环梁(或横梁)上下运动, 用锁销将环梁(或横梁)和桩腿锁紧使桩 腿升降。
电动齿轮齿条式升降装置由电动机经过减 速机构带动齿轮转动,使齿轮与桩腿上齿 条啮合而完成平台主体与桩腿的相对运动。
电动液压式升降机构
电 动 齿 轮 齿 条 式 升 降
桩腿结构有独立式桩腿,有沉垫式桩腿, 也有混合式桩腿。独立式桩腿的形式可分 为壳体式和桁架式两类。
带有齿块的圆形壳体式桩腿
带有销孔的圆形壳体式桩腿
带有销孔的圆形壳体式桩腿
方形齿条壳体桩腿
圆形齿条壳体桩腿
桩脚端部结构
桩腿实际上是指桩脚的上部,也称桩身, 这一部分要考虑强度和与升降机构的配合。
缺点:桩腿长度有限,最 大工作水深在120m左右, 否则桩腿升高对稳性和平 台强度有很大的不利影响。
海上平台设备图解介绍参考资料

平台设备图解!bull nose用来封住casing string的钢板(焊在下端部),球面形或半椭球形,像个牛鼻子。
有的直接用个带螺纹的塞子塞住的。
好像是用来做泥浆循环实验。
cat head在drill floor上的cat head用来辅助吊sand line的,如下图红色的cat head,顶部的轮子下面有个液压泵,旁边的轮子可以像合页一样转动,用来调整拉拽的角度。
还应该有根钢丝,一端绕过旁边的轮子和顶部的轮子,固定在另一端(和旁边轮子对过的一边),使用的时候顶部的轮子在液压泵的推动下向上移动,钢丝的来拽距离是上面轮子移动距离的两倍。
这种形式的cathead目前广泛应用在平台和钻井船上。
cat walk在船上的catwalk大家都知道的吧,在平台上也有类似的结构。
在钻井系统中指的是和vee-door下面的pipe ramp链接的窄长平台,用来运送钻井所需的工具、管子等这个图是陆地上catwalk。
图中是工人在上面选管子准备运到drill floor上。
finger board在derrick上用来扶持接好的drill pipe和coller的。
因形状像人的手指而得名。
这是陆地上的derrick。
在平台和钻井船上,finger board是在derrick的里面的。
见下图这些大手指上还有些小手指,管子运过来的时候会自动打开,(图中正在打开,管子放好后会关闭)有了这套系统,就不需要monkey board了。
这套系统既节省的大量时间,又不需要很多劳动力,据说可以提高25%的效率,而造价只占整个rig的1%。
fox holefox hole的作用类似mouse hole,都是放管子准备接起来的,区别在于他有slips,还有在结构方面,是下沉的,而且需要beam支撑,安装了slips后基本和drill floor平齐了。
一般是两个并排的,有的也有三个。
为什么要有slips?有个这个可以实现自动化,它固定了管子的位置,roughneck可以准确的找到管子的位置,进行接管子。
海洋平台结构物简介
简介
座底式海洋钻井平台
坐底式钻井平台又叫钻驳或插桩钻驳,适用于 河流和海湾等30m以下的浅水域。 坐底式平台有两个船体,上船体又叫工作甲板, 安置生活舱室和设备,通过尾部开口借助悬臂结 构钻井;下部是沉垫,其主要功能是压载以及海 底支撑作用,用作钻井的基础。两个船体间由支 撑结构相连。这种钻井装置在到达作业地点后往 沉垫内注水,使其着底。因此从稳性和结构方面 看,作业水深不但有限,而且也受到海底基础(平 坦及坚实程度)的制约。所以这种平台发展缓慢。
SPAR平台
胜利3号
胜利4号
自升式钻井平台( jackup)
自升式钻井平台又称甲板升降式或桩腿式平台。 这种石油钻井装置在浮在水面的平台上装载钻井 机械、动力、器材、居住设备以及若干可升降的 桩腿,钻井时桩腿着底,平台则沿桩腿升离海面 一定高度;移位时平台降至水面,桩腿升起,平 台就像驳船,可由拖轮把它拖移到新的井位。 自升式平台的优点主要是所需钢材少、造价低, 在各种海况下都能平稳地进行钻井作业;缺点是 桩腿长度有限,使它的工作水深受到限制,最大 的工作水深约在120m左右。超过此水深,桩腿重 量增加很快,同时拖航时桩腿升得很高,对平台 稳性和桩腿强度都不利。
南海5号
张力腿式平台 TLP
• 张力腿式钻力相平衡的钻井平台或生产平台。 • 张力腿式钻井平台也是采用锚泊定位的,但与——般半潜 式平台不同。其所用锚索绷紧成直线,不是悬垂曲线,钢 索的下端与水底不是相切的,而是几乎垂直的。用的是桩 锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般 容易起放的抓锚。张力腿式平台的重力小于浮力,所相差 的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于 由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧 平台的作用。张力腿式平台自1954年提出设想以来,迄今 已有40年的历史。
《海洋平台设计》课件

2023《海洋平台设计》课件contents •海洋平台设计概述•海洋平台的设计与建造•海洋平台的类型与结构•海洋平台的上部结构与设备•海洋平台的性能与安全•海洋平台的未来发展与挑战目录01海洋平台设计概述海洋平台是固定在海洋中的结构物,用于支撑和承载海上设施和海上作业,如海上石油钻井平台、海洋观测平台等。
海洋平台定义海洋平台具有结构复杂、设计难度大、建造技术要求高、使用环境恶劣等特点,需要具备较高的安全性、可靠性、耐久性和经济性。
海洋平台特点海洋平台定义与特点海洋平台的应用范围用于支撑和固定海上石油钻井平台、采油平台等设施。
海上石油工业海洋工程海洋资源开发科研与观测用于海上风电、潮汐能、海洋能等新能源设施的开发和建设。
用于海底矿产资源开发、海洋渔业等。
用于海洋科学研究、海洋观测和监测等。
早期的海洋平台多为木结构,由于材料强度和可靠性不足,使用寿命较短。
海洋平台的历史与发展早期海洋平台随着技术的发展,现代海洋平台多采用钢结构或混凝土结构,提高了平台的强度和耐久性。
现代海洋平台未来海洋平台将更加注重环保、节能和智能化,采用新能源和新技术,提高平台的自适应能力和自动化水平。
未来海洋平台02海洋平台的设计与建造详细设计对概念设计进行深化和完善,考虑结构分析、设备选型、材料选用、制造工艺等方面的细节问题,形成详细的平台设计方案。
概念设计根据项目需求和工程条件,进行概念设计方案制定,包括平台类型选择、结构形式和尺寸确定等。
辅助设计利用计算机辅助设计软件进行建模、分析和优化,提高设计质量和效率。
海洋平台的设计根据平台设计方案,制作各种预制构件,包括钢构、桩基、导管架等。
预制构件制作海上安装调试与验收将预制好的构件运到海上,按照设计方案进行安装和连接,形成完整的海洋平台。
对已建好的海洋平台进行调试和验收,确保平台性能和质量达到预期要求。
03海洋平台的建造0201改造升级对现有平台进行改造升级,提高平台性能和安全性,满足新的工程需求。
海洋平台设备图解
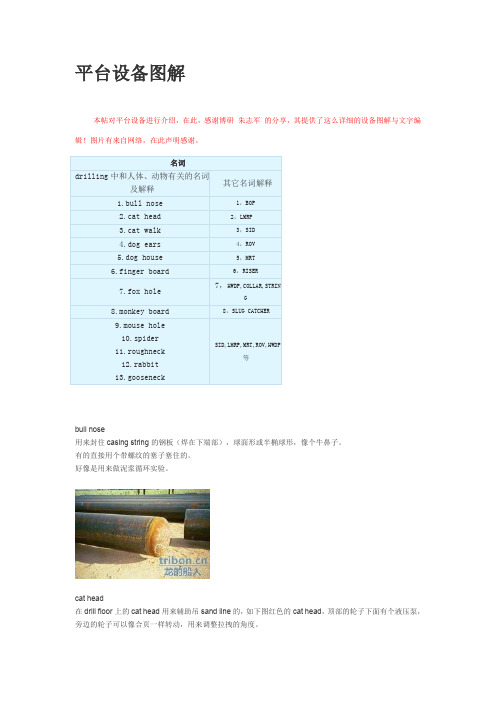
平台设备图解本帖对平台设备进行介绍,在此,感谢博研朱志军的分享,其提供了这么详细的设备图解与文字编辑!图片有来自网络,在此声明感谢。
bull nose用来封住casing string的钢板(焊在下端部),球面形或半椭球形,像个牛鼻子。
有的直接用个带螺纹的塞子塞住的。
好像是用来做泥浆循环实验。
cat head在drill floor上的cat head用来辅助吊sand line的,如下图红色的cat head,顶部的轮子下面有个液压泵,旁边的轮子可以像合页一样转动,用来调整拉拽的角度。
还应该有根钢丝,一端绕过旁边的轮子和顶部的轮子,固定在另一端(和旁边轮子对过的一边),使用的时候顶部的轮子在液压泵的推动下向上移动,钢丝的来拽距离是上面轮子移动距离的两倍。
这种形式的cathead目前广泛应用在平台和钻井船上。
cat walk在船上的catwalk大家都知道的吧,在平台上也有类似的结构。
在钻井系统中指的是和vee-door下面的pipe ramp链接的窄长平台,用来运送钻井所需的工具、管子等这个图是陆地上catwalk。
图中是工人在上面选管子准备运到drill floor上。
finger board在derrick上用来扶持接好的drill pipe和coller的。
因形状像人的手指而得名。
这是陆地上的derrick。
在平台和钻井船上,finger board是在derrick的里面的。
见下图这些大手指上还有些小手指,管子运过来的时候会自动打开,(图中正在打开,管子放好后会关闭)有了这套系统,就不需要monkey board了。
这套系统既节省的大量时间,又不需要很多劳动力,据说可以提高25%的效率,而造价只占整个rig的1%。
fox holefox hole的作用类似mouse hole,都是放管子准备接起来的,区别在于他有slips,还有在结构方面,是下沉的,而且需要beam支撑,安装了slips后基本和drill floor平齐了。
二海洋平台建造工艺(6总装)

石油工程学院海洋工程系
§2-6 海洋平台总装工艺 一、导管架平台陆地总装工艺
2、场地布置 3、场地布置
——钢桩及隔水套管接长场地
钢桩及隔水套管接长场地主要用 于导管架钢桩及隔水套管的场地接长 作业。 由于受制管车间条件的限制,钢桩 和隔水套管在车间一般只能接长为十 几米长的若干段,然后运到接长场地 最后接长成为一根完整的钢桩或隔水 套管管段。场地配备的主要设备有龙 门吊,埋弧自动焊机等。
混凝土垫墩
钢质垫墩
石油工程学院海洋工程系
§2-6 海洋平台总装工艺
5、场地常用工装 6、场地常用工装 (2). 地锚 在导管架建造过程中,是先把各个单片分别预制好,然后进行组装, 组装时先立导管架片,然后从下往上安装水平片,最后将另一个导管 架片合拢。立片完成后一般是用钢丝绳将其固定在地锚上。地锚受力 比较单一,一般只受拉力的作用。使用时应用软件进行稳定性验算。
石油工程学院海洋工程系
§2-6 海洋平台总装工艺 一、导管架平台陆地总装工艺 2、导管架加工设计
(1)设计依据
——详细设计结果建造规格书 ——详细设计结果材料规格书 (2)导管架加工图
——结构加工图
——单件图 ——样板图
——详细设计焊接规格书
——详细设计检验规格书 ——相关规范、标准
——造管图
——被交位置图 ——机加工图 ——完工图
滑靴
石油工程学院海洋工程系
§2-6 海洋平台总装工艺 7、导管架组装程序
卧 式
方 法
立 式
管件预制
分片预制
总装
石油工程学院海洋工程系
7、导管架建造程序
立式安装组装顺序
6、导管架建造程序 7、导管架组装程序
卧式安装组装顺序
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平台设备图解本帖对平台设备进行介绍,在此,感谢博研朱志军的分享,其提供了这么详细的设备图解与文字编辑!图片有来自网络,在此声明感谢。
bull nose用来封住casing string的钢板(焊在下端部),球面形或半椭球形,像个牛鼻子。
有的直接用个带螺纹的塞子塞住的。
好像是用来做泥浆循环实验。
cat head在drill floor上的cat head用来辅助吊sand line的,如下图红色的cat head,顶部的轮子下面有个液压泵,旁边的轮子可以像合页一样转动,用来调整拉拽的角度。
还应该有根钢丝,一端绕过旁边的轮子和顶部的轮子,固定在另一端(和旁边轮子对过的一边),使用的时候顶部的轮子在液压泵的推动下向上移动,钢丝的来拽距离是上面轮子移动距离的两倍。
这种形式的cathead目前广泛应用在平台和钻井船上。
cat walk在船上的catwalk大家都知道的吧,在平台上也有类似的结构。
在钻井系统中指的是和vee-door下面的pipe ramp链接的窄长平台,用来运送钻井所需的工具、管子等这个图是陆地上catwalk。
图中是工人在上面选管子准备运到drill floor上。
finger board在derrick上用来扶持接好的drill pipe和coller的。
因形状像人的手指而得名。
这是陆地上的derrick。
在平台和钻井船上,finger board是在derrick的里面的。
见下图这些大手指上还有些小手指,管子运过来的时候会自动打开,(图中正在打开,管子放好后会关闭)有了这套系统,就不需要monkey board了。
这套系统既节省的大量时间,又不需要很多劳动力,据说可以提高25%的效率,而造价只占整个rig的1%。
fox holefox hole的作用类似mouse hole,都是放管子准备接起来的,区别在于他有slips,还有在结构方面,是下沉的,而且需要beam支撑,安装了slips后基本和drill floor平齐了。
一般是两个并排的,有的也有三个。
为什么要有slips?有个这个可以实现自动化,它固定了管子的位置,roughneck可以准确的找到管子的位置,进行接管子。
一系列运管子,接管子,再运到fingerboard上都是电脑自动控制的。
设定好程序后操作人员就可以去喝咖啡了。
monkey boardmonkey board和finger board是在一起的,是个窄小的平台,工人可以在上面辅助取放管子的操作(tripping pipe)。
其高度离drill floor一般为35或40英尺(1ft=304.8mm),不同的井架上可能有所不同,但基本都是大约在derrick的中部,这副图中可以看到人后面波浪线样的结构,是finger board上用来固定管子的。
现在在自动控制的体统中用的是像小手指一样的结构,装在大的手指上,可以转动(自动控制)。
mouse holemouse hole就是在drill floor的rotary table旁边简单的开个洞,下面有个套管,放钻管接头的。
spider一个放在rotary table 上的几座,里面是个锥形面,用来安装slips,和fox hole的slips一样用于抓住drilling pipe或casing pipe。
在接管子的时候提起方钻管,夹住下面的管子,然后由roughneck拧开方钻管,方钻管就会被移动到mouse hole上方去链接放在里面的joint也就是钻管,然后在移会rotary table接上去继续钻,同时另一根jiont又被放进mouse hole。
roughneckroughneck,铁钻工。
用来拧紧和拧开管子用的,rotary table上有一个。
foxhole上也有一个。
这个图是ratary table上的roughneck。
从中也可以看出cathead的布置,其实有两个,沿ratary table 中心线对称。
仔细看roughneck旁边的drill floor能看到两边有两个沉下去的“池子”这里将来会装上木头,接好的管子就放这里,上面是对应的finger board。
接好的管子(钻管或钻环)就叫做sand line ,cathead就是拖拽这sand line的。
rabbit如图,用来清理管子casing里面的焊渣毛刺等脏东西,两头的环是用来链接绳索(钢丝等)。
从管子里拉一下就清理里面的脏东西了了。
gooseneck处在最顶端,用来连接stand pipe 和钻管的,随travelling block移动,泥浆或水泥就是从软管经过这个gooseneck到drill pipe里的。
BOP-blowout preventer用一个字解释BOP就是--阀。
从结构形式及工作原理来分主要有两类:ram and annular。
(闸板型,环形型)<果友更正---->典型环形:典型闸板型:通常在使用的时候是两种组合的目前多数为液压控制,产品已系列化,有一系列的尺寸,和工作压力。
(看了下手册,最大的工作压力可达30,000psi=2068.43bar,),1psi=1pound force per square inch=6894.76pa。
bop实物图关于bop为什么需要bop?为了防止井喷,井喷是件很危险的事情,当钻井钻到含气或含油层的时候,巨大的油气压力能把钻管泥浆等喷出来,破坏rig,污染环境,威胁工作人员的安全,甚至周围居民安全,喷出有毒气体(硫化氢)影响很大。
大家是否记得几年前中国哪来生井喷事故,大量的硫化氢气体泄露……bop如何工作?楼上图2中的9是在钻管还在井里的时候使用,4是在没有钻管的时候使用它们都是是包裹橡胶的闸板,依靠液压推动来关闭和打开。
环形的也是橡胶,依靠液压动力推动挤压,达到封闭的目的还有和bop配套的控制设备:气罐,泵,液压设备,控制开关,管路,阀,等。
bop响应时间?环形bop的相应时间为60秒闸板型bop的相应时间为30秒什么时候关闭?依靠监控井口压力的装置,判断是否需要关闭。
如果关闭后压力仍继续增大,剪断钻管也无法封住,就该通知rig上的人,开始逃跑了,在陆地的drill floor上有个滑滑梯就是紧急逃跑用的。
关闭后怎么办?bop关闭后就开始使用chock and kill manifold ,MGS--mud gas separator。
平台上的BOP--SBOP and SSBOP上面是些bop的基本知识,具体应用在平台和钻井船上是和陆地上不同的,在陆地上容易固定,也容易操作,在浮动平台和钻井船就不同了.在平台上有两种:SBOP 和SSBOPSSBOP--subsea bop是在海底的,实际应用时是把控制系统集成在一起组成SSBOP STACK要和LMRP配合使用,LMRP叠加在SSBOP上,上面在连接riser。
riser最上面是用MRT悬挂的telescopic jiont。
控制系统一般采取遥控的方式,同时还需要对bop进行监控(可以用ROV监控)。
SBOP--surface bop使用时要和SID(或SIS)配合使用,SBOP靠MRT悬挂在drill floor下面,SID和SSBOP类似是坐在在海底井口上的。
两者用riser连接。
图片:BOP STACK,包含bop,控制系统,支架BOP的控制系统平台上的bop控制系统是和bop集成在一起的,即bop stack。
因为sbop处于悬挂状态,如果靠液压管链接控制,动态的很难控制。
ssbop处于很深的海底,如果靠平台上的液压管来控制,降大大延长bop的相应时间。
因此平台或钻井船的bop是和控制系统集成在一起的。
看看这个控制系统。
MGS--mud gas separaoer和chock and kill manifole(节流压井管汇)同时使用,当bop关闭的时候用开始启用。
bop关闭后要进行节流,即通过chock line 节流,排放泥浆。
bop之所以关闭,是因为发生kick了,说明已经钻到含气层或含油层,此时会有气体和石油伴随泥浆出来,需要经过MGS来把气体分出来,特别是当里面还有硫化氢的时候是很危险的,分出的气体经管路通往flare boom点燃,这就是为什么我们会从电视或图片上看到平台上有个“火把”。
关闭bop后泥浆经过diverter流经MGS在流到chock and kill manifole前有一个U型管,防止气体逃逸。
chock and kill manifold节流压井汇管kill是当打开bop是把泥浆充在ram上面来平衡ram上下压力,防止打开时候损坏ram上的橡胶。
chock在MGS一帖里讲过。
实际上chock manifold 和kill manifold是可以分开的,现在多数情况都是把两者和在一起,有专门厂商提供。
DP3--DYNAMIC POSITIONING(CLASS)3(仅作了解性解释)DP -DYNAMIC POSITIONING 动力定位。
其中的3是要求等级。
有0,1,2,3种等级,不同船级社说法有点不同。
DP3是GL说法。
大概就是依靠一系列传感器获得船舶或平台的移动信息,通过计算机控制几个推进器进行位置修正。
目的是使平台在复杂海况下保持位置在允许范围内变动,确保riser和钻管不会有太大偏移。
还可以用在其他工程船,游轮等上面。
这是维基百科对DP的解释,很详细,/wiki/Dynamic_positioningLMRP--Lower Marine Riser Package 下水管隔离总成与SBOP--subsea bolwout preventer同时使用,叠加在SBOP的上面。
作用:是链接ssbop和riser,原因是ssbop不像sbop有接口,ssbop是可以根据需要进行几个bop叠加使用的,有了固定接口就不能叠加了。
组成:其实里面也有类似球形bop的结构,就是球形阀,和万向接头。
另外就是与hydrolic line(两根) ,kill and choke line ,和booster line的接口,从接口下来就是软管,在软管的两端直接是万向接头。
这些line就是小管子,用来控制bop和节流压井用的,ssbop系统中的riser上也有这样的小管子,而在sbop系统中用的是casing riser没有小管子的。
下面第一个图中那个亮点以上是LMRP,下面是SSBOPSID--sub-sea isolation device水下隔离装置与SBOP-surface blowout preventer同时使用,位于井口上方,与sbop之间是casing riser,作用类似ssbop 与lmrp组合。
里面也有bop。