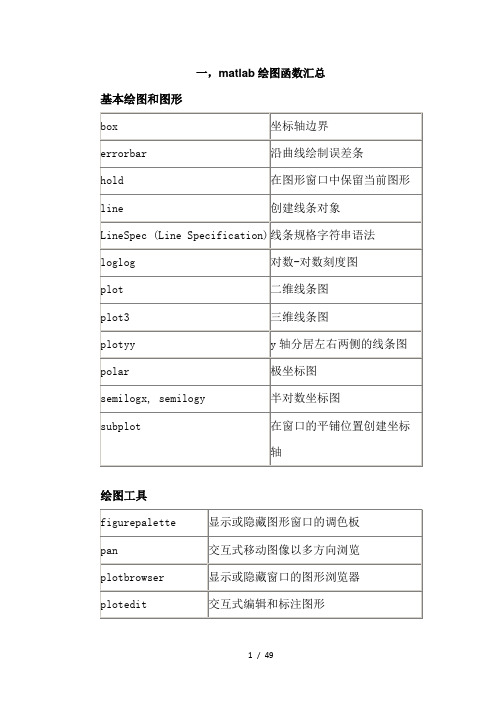
图像直角坐标系向对数极坐标转换的有关代码
极坐标和直角坐标系之间的转换是怎样的

极坐标和直角坐标系之间的转换是怎样的坐标系是几何学中用来描述点的位置的一种系统。
在平面几何中,最常见的两种坐标系是极坐标和直角坐标系。
极坐标使用半径和极角来定位一个点,而直角坐标系使用x轴和y轴上的坐标来描述一个点的位置。
当我们需要在两种坐标系之间进行转换时,可以使用一些简单的数学公式实现。
下面将详细介绍极坐标和直角坐标系之间的转换方法。
极坐标转直角坐标假设我们有一个极坐标点,表示为(r, θ),其中r是点到原点的距离,θ是点与x轴正方向的夹角。
我们可以按照以下步骤将其转换为直角坐标:1.使用三角函数计算点的x坐标:x = r * cos(θ)。
2.使用三角函数计算点的y坐标:y = r * sin(θ)。
这样,我们就得到了这个极坐标点在直角坐标系中的位置。
直角坐标转极坐标假设我们有一个直角坐标点,表示为(x, y),我们可以按照以下步骤将其转换为极坐标:1.计算点到原点的距离:r = sqrt(x^2 + y^2)。
2.计算点与x轴正方向的夹角:θ = atan2(y, x)。
注意,在计算θ时,我们使用了反正切函数atan2。
这个函数可以根据点的x 和y坐标来计算角度,并考虑了点所在的象限。
经过上述步骤,我们就得到了这个直角坐标点在极坐标系中的表示。
转换示例为了更好地理解这个转换过程,以下是一个具体的示例。
假设我们有一个极坐标点,表示为(5, π/6)。
我们可以按照上述方法将其转换为直角坐标:1.计算x坐标:x = 5 * cos(π/6) = 5 * √3/2 = 5√3/2 ≈ 4.33。
2.计算y坐标:y = 5 * sin(π/6) = 5 * 1/2 = 5/2 = 2.5。
所以,这个极坐标点可以表示为直角坐标点(4.33, 2.5)。
同样地,假设我们有一个直角坐标点,表示为(3, 4),我们可以按照上述方法将其转换为极坐标:1.计算距离:r = sqrt(3^2 + 4^2) = sqrt(9 + 16) = sqrt(25) = 5。
极坐标与直角坐标的转化公式
极坐标与直角坐标的转化公式哎呀,今天咱们聊聊极坐标和直角坐标的转化公式。
这可真是个让人又爱又恨的话题,咱们先从这俩名词说起。
直角坐标听起来就很简单,咱们说的就是平面上的“X”和“Y”坐标嘛,谁还没在学校的时候画过那一张方格纸,来来回回的写着(2,3)这样的点呢?想象一下,小小的坐标像是一个个小朋友在操场上自由玩耍。
你喊一声,“哎,2和3,过来一下!”它们立马就来找你了,乖得很。
而极坐标呢,嘿,这就有意思了!极坐标就像是把坐标的玩法变成了一种奇妙的探险。
你想象一下,极坐标里有个“R”和一个“θ”。
R就是你要和中心的距离,θ是个角度,就像你在一块大披萨上点一块,哦,没错,那块正好是“R”的距离,转个“θ”度就到你的目标了。
感觉就像在玩一个找宝藏的游戏。
瞧,这两种坐标,各有千秋,各有特色。
咱们怎么把这两者联系起来呢?简单呀。
要是你有了极坐标(R, θ),你只需运用点小窍门,就能转成直角坐标(X, Y)。
公式来啦!X = R * cos(θ),Y = R * sin(θ)。
听起来是不是有点儿像魔法咒语?其实不然,简单得很。
比如说,假设你有个R是5,角度θ是60度。
别忘了,cos(60°) 是 0.5,sin(60°) 是√3/2,哈哈,算算吧。
X = 5 * 0.5 = 2.5,Y = 5 * √3/2 ≈ 4.33。
瞧,这下就能把极坐标“变身”为直角坐标了,嘿嘿,简单吧!不过可能有朋友会问,为什么要折腾这两个坐标呢?哦,那可真是因人而异。
有时候在数学问题里,极坐标更方便,因为很多图形的形状和性质用极坐标来描述更直观。
而在某些时候,直角坐标又是解题的好帮手。
简直是如鱼得水,来去自如,随心所欲。
生活中我们也能找到极坐标和直角坐标的影子。
比如说,咱们去游乐园,坐旋转木马。
木马上坐的位置就是极坐标的R和θ,旋转的角度就像是θ,最后回到的点就成了直角坐标中的X和Y。
看,数学无处不在,真的就像你身边的小伙伴,不可或缺。
直角坐标与极坐标系的互相转化

汇报人:XX
CONTENTS
PART ONE
转换公式:x=ρcosθ,y=ρsinθ ρ的取值范围:ρ≥0 极角θ的取值范围:0≤θ<2π
极坐标转换为直角坐标公式:x=ρcosθ,y=ρsinθ
极坐标与直角坐标的转换关系可以通过极坐标系中的极点O和极轴来进行转换
举例:点(0, 5)在 直角坐标系中,其 极坐标表示为(5, π/2)
案例一:点P的坐 标转换
案例二:圆心角 与极角的关系
案例三:极坐标系 中的曲线方程转换 为直角坐标系中的 曲线方程
案例四:极坐标系 中的面积转换为直 角坐标系中的面积
汇报人:XX
在极坐标系中,ρ表示点到原点的距离,θ表示点与极轴之间的夹角
通过极坐标转换为直角坐标公式,我们可以将极坐标系中的点转换为直角坐标系 中的点
PART TWO
直角坐标系中,点的位置由一对数值(x,y)确定,表示为有序数对。 直角坐标系是二维平面上的坐标系,可以用来描述平面内物体的位置和运动。 直角坐标系中的距离、角度和面积等几何量都可以通过坐标值进行计算。 直角坐标系在解析几何、代数、微积分等领域有广泛应用。
物理学中的粒子 运动轨迹分析
地球表面地理坐 标的表示
雷达定位和导航 系统
声呐、地震勘探 等领域的数据处 理
PART FOUR
优点:几何意义明确,适用 于描述直线和圆等简单曲线
缺点:对于复杂曲线或函数, 描述不够简洁,且不易看出函
数之间的关系
添加标题
极坐标的优点:在处理某些几何 和物理问题时,极坐标比直角坐 标更加直观和方便,例如在研究 曲线、旋转体和万有引力定律等 问题时。
极坐标和直角坐标的转换公式是什么

极坐标和直角坐标的转换公式是什么引言在数学和物理学中,极坐标和直角坐标是两种常用的坐标系。
它们分别用于描述平面上的点的位置。
极坐标使用极径(r)和极角(θ)来表示点的位置,而直角坐标使用x和y来表示点的位置。
在某些情况下,我们可能需要在这两种坐标系之间进行转换。
本文将介绍极坐标和直角坐标之间的转换公式。
极坐标到直角坐标的转换公式要将极坐标转换为直角坐标,我们需要使用以下公式:极坐标到直角坐标的转换公式极坐标到直角坐标的转换公式极坐标到直角坐标的转换公式极坐标到直角坐标的转换公式在这些公式中,x和y分别是点在直角坐标系中的坐标,r是点到原点的距离,而θ是点与正x轴的夹角。
直角坐标到极坐标的转换公式要将直角坐标转换为极坐标,我们需要使用以下公式:直角坐标到极坐标的转换公式直角坐标到极坐标的转换公式直角坐标到极坐标的转换公式直角坐标到极坐标的转换公式在这些公式中,r仍然表示点到原点的距离,θ表示点与正x轴的夹角。
x和y则是点在直角坐标系中的坐标。
示例让我们以一个简单的示例来演示如何使用这些转换公式。
假设我们有一个点P,其极坐标为(r=2,θ=π/4)。
我们将使用转换公式将其转换为直角坐标。
首先,我们将r=2和θ=π/4代入极坐标到直角坐标的转换公式。
得到:极坐标到直角坐标的示例计算极坐标到直角坐标的示例计算极坐标到直角坐标的示例计算极坐标到直角坐标的示例计算通过计算,我们得到x ≈ 1.414和y ≈ 1.414。
因此,点P在直角坐标系中的坐标为(x ≈ 1.414, y ≈ 1.414)。
接下来,让我们以相反的方式进行转换。
假设我们有一个点Q,其直角坐标为(x=3,y=-2)。
我们将使用转换公式将其转换为极坐标。
首先,我们将x=3和y=-2代入直角坐标到极坐标的转换公式。
得到:直角坐标到极坐标的示例计算直角坐标到极坐标的示例计算直角坐标到极坐标的示例计算直角坐标到极坐标的示例计算通过计算,我们得到r ≈ 3.606和θ ≈ -0.588。
数学建模算法的matlab代码
二,hamiton回路算法提供一种求解最优哈密尔顿的算法---三边交换调整法,要求在运行jiaohuan3(三交换法)之前,给定邻接矩阵C和节点个数N,结果路径存放于R中。
bianquan.m文件给出了一个参数实例,可在命令窗口中输入bianquan,得到邻接矩阵C和节点个数N以及一个任意给出的路径R,,回车后再输入jiaohuan3,得到了最优解。
由于没有经过大量的实验,又是近似算法,对于网络比较复杂的情况,可以尝试多运行几次jiaohuan3,看是否能到进一步的优化结果。
%%%%%%bianquan.m%%%%%%%N=13;for i=1:Nfor j=1:NC(i,j)=inf;endendfor i=1:NC(i,i)=0;endC(1,2)=6.0;C(1,13)=12.9;C(2,3)=5.9;C(2,4)=10.3;C(3,4)=12.2;C(3,5)=17.6;C(4,13)=8.8;C(4,7)=7.4;C(4,5)=11.5;C(5,2)=17.6;C(5,6)=8.2;C(6,9)=14.9;C(6,7)=20.3;C(7,9)=19.0;C(7,8)=7.3;C(8,9)=8.1;C(8,13)=9.2;C(9,10)=10.3;C(10,11)=7.7;C(11,12)=7.2;C(12,13)=7.9;for i=1:Nfor j=1:Nif C(i,j) < infC(j,i)=C(i,j);endendendfor i=1:NC(i,i)=0;endR=[4 7 6 5 3 2 1 13 12 11 10 9 8];<pre name="code" class="plain">%%%%%%%%jiaohuan3.m%%%%%%%%%%n=0;for I=1:(N-2)for J=(I+1):(N-1)for K=(J+1):Nn=n+1;Z(n,:)=[I J K];endendendR=1:Nfor m=1:(N*(N-1)*(N-2)/6)I=Z(m,1);J=Z(m,2);K=Z(m,3); r=R;if J-I~=1&K-J~=1&K-I~=N-1 for q=1:(J-I)r(I+q)=R(J+1-q);endfor q=1:(K-J)r(J+q)=R(K+1-q);endendif J-I==1&K-J==1r(K)=R(J);r(J)=R(K);endif J-I==1&K-J~=1&K-I~=N-1 for q=1:(K-J)r(I+q)=R(I+1+q); endr(K)=R(J);endif K-J==1&J-I~=1&K~=Nfor q=1:(J-I)r(I+1+q)=R(I+q); endr(I+1)=R(K);endif I==1&J==2&K==Nfor q=1:(N-2)r(1+q)=R(2+q);endr(N)=R(2);endif I==1&J==(N-1)&K==Nfor q=1:(N-2)r(q)=R(1+q);endr(N-1)=R(1);endif J-I~=1&K-I==N-1for q=1:(J-1)r(q)=R(1+q);endr(J)=R(1);endif J==(N-1)&K==N&J-I~=1r(J+1)=R(N);for q=1:(N-J-1)r(J+1+q)=R(J+q);endendif cost_sum(r,C,N)<cost_sum(R,C,N)R=rendendfprintf('总长为%f\n',cost_sum(R,C,N))%%%%%%cost_sum.m%%%%%%%%functiony=cost_sum(x,C,N)y=0;for i=1:(N-1)y=y+C(x(i),x(i+1));endy=y+C(x(N),x(1));三,灰色预测代码<pre name="code" class="plain">clearclcX=[136 143 165 152 165 181 204 272 319 491 571 605 665 640 628];x1(1)=X(1);X1=[];for i=1:1:14x1(i+1)=x1(i)+X(i+1);X1=[X1,x1(i)];endX1=[X1,X1(14)+X(15)]for k=3:1:15p(k)=X(k)/X1(k-1);p1(k)=X1(k)/X1(k-1);endp,p1clear kZ=[];for k=2:1:15z(k)=0.5*X1(k)+0.5*X1(k-1);Z=[Z,z(k)];endZB=[-Z',ones(14,1)]Y=[];clear ifor i=2:1:15Y=[Y;X(i)];endYA=inv(B'*B)*B'*Yclear ky1=[];for k=1:1:15y(k)=(X(1)-A(2)/A(1))*exp(-A(1)*(k-1))+A(2)/A(1); y1=[y1;y(k)];endy1clear kX2=[];for k=2:1:15x2(k)=y1(k)-y1(k-1);X2=[X2;x2(k)];endX2=[y1(1);X2]e=X'-X2m=abs(e)./X's=e'*en=sum(m)/13clear ksyms ky=(X(1)-A(2)/A(1))*exp(-A(1)*(k-1))+A(2)/A(1)Y1=[];for j=16:1:21y11=subs(y,k,j)-subs(y,k,j-1);Y1=[Y1;y11];endY1%程序中的变量定义:alpha是包含α、μ值的矩阵;%ago是预测后累加值矩阵;var是预测值矩阵;%error是残差矩阵; c是后验差比值function basicgrey(x,m) %定义函数basicgray(x)if nargin==1 %m为想预测数据的个数,默认为1 m=1;endclc; %清屏,以使计算结果独立显示if length(x(:,1))==1 %对输入矩阵进行判断,如不是一维列矩阵,进行转置变换x=x';endn=length(x); %取输入数据的样本量x1(:,1)=cumsum(x); %计算累加值,并将值赋及矩阵be for i=2:n %对原始数列平行移位 Y(i-1,:)=x(i,:);endfor i=2:n %计算数据矩阵B的第一列数据z(i,1)=0.5*x1(i-1,:)+0.5*x1(i,:);endB=ones(n-1,2); %构造数据矩阵BB(:,1)=-z(2:n,1);alpha=inv(B'*B)*B'*Y; %计算参数α、μ矩阵for i=1:n+m %计算数据估计值的累加数列,如改n+1为n+m可预测后m个值ago(i,:)=(x1(1,:)-alpha(2,:)/alpha(1,:))*exp(-alpha(1, :)*(i-1))+alpha(2,:)/alpha(1,:);endvar(1,:)=ago(1,:);f or i=1:n+m-1 %可预测后m个值var(i+1,:)=ago(i+1,:)-ago(i,:); %估计值的累加数列的还原,并计算出下m个预测值end[P,c,error]=lcheck(x,var); %进行后验差检验[rela]=relations([x';var(1:n)']); %关联度检验ago %显示输出预测值的累加数列alpha %显示输出参数α、μ数列var %显示输出预测值error %显示输出误差P %显示计算小残差概率 c %显示后验差的比值crela %显示关联度judge(P,c,rela) %评价函数显示这个模型是否合格<pre name="code" class="plain">function judge(P,c,rela) %评价指标并显示比较结果if rela>0.6'根据经验关联度检验结果为满意(关联度只是参考主要看后验差的结果)'else'根据经验关联度检验结果为不满意(关联度只是参考主要看后验差的结果)'endif P>0.95&c<0.5'后验差结果显示这个模型评价为“优”'else if P>0.8&c<0.5'后验差结果显示这个模型评价为“合格”'else if P>0.7&c<0.65'后验差结果显示这个模型评价为“勉强合格”' else'后验差结果显示这个模型评价为“不合格”' endendendfunction [P,c,error]=lcheck(x,var)%进行后验差检验n=length(x);for i=1:nerror(i,:)=abs(var(i,:)-x(i,:)); %计算绝对残差c=std(abs(error))/std(x); %调用统计工具箱的标准差函数计算后验差的比值cs0=0.6745*std(x);ek=abs(error-mean(error));pk=0;for i=1:nif ek(i,:)<s0pk=pk+1;endendP=pk/n; %计算小残差概率%附带的质料里有一部分讲了关联度function [rela]=relations(x)%以x(1,:)的参考序列求关联度[m,n]=size(x);for i=1:mfor j=n:-1:2x(i,j)=x(i,j)/x(i,1);endfor i=2:mx(i,:)=abs(x(i,:)-x(1,:)); %求序列差endc=x(2:m,:);Max=max(max(c)); %求两极差Min=min(min(c));p=0.5; %p称为分辨率,0<p<1,一般取p=0.5for i=1:m-1for j=1:nr(i,j)=(Min+p*Max)/(c(i,j)+p*Max); %计算关联系数endendfor i=1:m-1rela(i)=sum(r(i,:))/n; %求关联度end四,非线性拟合function f=example1(c,tdata)f=c(1)*(exp(-c(2)*tdata)-exp(-c(3)*tdata));<pre name="code" class="plain">function f=zhengtai(c,x) f=(1./(sqrt(2.*3.14).*c(1))).*exp(-(x-c(1)).^2./(2.*c( 2)^2));x=1:1:12;y=[01310128212]';c0=[2 8];for i=1:1000c=lsqcurvefit(@zhengtai,c0,x,y);c0=c;endy1=(1./(sqrt(2.*3.14).*c(1))).*exp(-(x-c(1)).^2./(2.*c (2)^2));plot(x,y,'r-',x,y1);legend('实验数据','拟合曲线')x=[0.25 0.5 0.75 1 1.5 2 2.5 3 3.5 4 4.5 5 6 7 8 9 10 11 12 13 14 15 16]';y=[30 68 75 82 82 77 68 68 58 51 50 41 38 35 28 25 18 15 12 10 7 7 4]';f=@(c,x)c(1)*(exp(-c(2)*x)-exp(-c(3)*x));c0=[114 0.1 2]';for i=1:50opt=optimset('TolFun',1e-3);[c R]=nlinfit(x,y,f,c0,opt)c0=c;hold onplot(x,c(1)*(exp(-c(2)*x)-exp(-c(3)*x)),'g')endt=[0.25 0.5 0.75 1 1.5 2 2.5 3 3.5 4 4.5 5 6 7 8 9 10 11 12 13 14 15 16];y=[30 68 75 82 82 77 68 68 58 51 50 41 38 35 28 25 18 15 12 10 7 7 4];c0=[1 1 1];for i=1:50 c=lsqcurvefit(@example1,c0,t,y);c0=c;endy1=c(1)*(exp(-c(2)*t)-exp(-c(3)*t));plot(t,y,' +',t,y1);legend('实验数据','拟合曲线')五,插值拟合相关知识在生产和科学实验中,自变量及因变量间的函数关系有时不能写出解析表达式,而只能得到函数在若干点的函数值或导数值,或者表达式过于复杂而需要较大的计算量。
极坐标方程和直角坐标方程的互化公式

极坐标方程和直角坐标方程的互化公式在数学中,我们经常使用不同的坐标系统来描述平面上的点。
两种常见的坐标系统是直角坐标系和极坐标系。
直角坐标系使用水平轴x和垂直轴y来表示点的位置,而极坐标系使用极径r和极角θ来表示点的位置。
在某些情况下,我们需要将一个点在直角坐标系中的表示转换为极坐标形式,或者反过来。
为了实现这种转换,我们可以使用极坐标方程和直角坐标方程的互化公式。
直角坐标系到极坐标系的转换要将一个点的直角坐标表示转换为极坐标表示,我们可以使用以下互化公式:r = sqrt(x^2 + y^2)θ = arctan2(y, x)其中,x是点在直角坐标系中的水平坐标,y是点在直角坐标系中的垂直坐标,r是点在极坐标系中的极径,θ是点在极坐标系中的极角。
sqrt表示平方根,arctan2表示双参数反正切函数。
使用这些公式,我们可以轻松地将一个点的直角坐标表示转换为极坐标表示。
极坐标系到直角坐标系的转换要将一个点的极坐标表示转换为直角坐标表示,我们可以使用以下互化公式:x = r * cos(θ)y = r * sin(θ)其中,r是点在极坐标系中的极径,θ是点在极坐标系中的极角,x是点在直角坐标系中的水平坐标,y是点在直角坐标系中的垂直坐标。
cos表示余弦函数,sin表示正弦函数。
使用这些公式,我们可以轻松地将一个点的极坐标表示转换为直角坐标表示。
应用举例假设我们有一个点P,其直角坐标表示为P(x, y) = P(3, 4)。
我们将使用上述公式将其转换为极坐标表示。
首先计算极径r:r = sqrt(x^2 + y^2)= sqrt(3^2 + 4^2)= sqrt(9 + 16)= sqrt(25)= 5然后计算极角θ:θ = arctan2(y, x)= arctan2(4, 3)≈ 0.93 rad所以,点P的极坐标表示为P(r, θ) = P(5, 0.93)。
同样地,假设我们有一个点Q,其极坐标表示为Q(r, θ) = Q(6, π/4)。
极坐标和直角坐标转换公式

极坐标和直角坐标转换公式在数学和物理学中,坐标系是研究和描述几何空间中点的位置的基本工具之一。
常用的坐标系包括直角坐标系和极坐标系。
直角坐标系使用直角坐标来表示点的位置,如 (x, y)。
而极坐标系使用极径和极角来表示点的位置,如(r, θ)。
在进行数学计算或几何分析时,我们经常需要将点在这两种坐标系之间进行转换。
本文将介绍极坐标和直角坐标的转换公式。
直角坐标转换为极坐标假设有一个点 P 在直角坐标系中,其坐标为 (x, y)。
现在我们要将其转换为极坐标系中的坐标(r, θ)。
这个转换过程可以通过以下两个公式实现:1.极径 r 的计算公式为:r= \sqrt{x2+y2}r= \sqrt{x2+y2}这个公式表示点 P 到原点的距离。
2.极角θ 的计算公式为:θ = \arctan\left(\frac{y}{x}\right)θ = \arctan\left(\frac{y}{x}\right)这个公式表示点 P 与 x 轴的夹角。
按照上述公式,我们可以将直角坐标系中的点转换为极坐标系中的坐标。
极坐标转换为直角坐标现在假设有一个点 Q 在极坐标系中,其坐标为(r, θ)。
我们要将其转换为直角坐标系中的坐标 (x, y)。
这个转换过程可以通过以下两个公式实现:1.x 坐标的计算公式为:x = r \cdot \cos(\theta)x = r \cdot \cos(\theta)这个公式表示点 Q 在 x 轴上的投影。
2.y 坐标的计算公式为:y = r \cdot \sin(\theta)y = r \cdot \sin(\theta)这个公式表示点 Q 在 y 轴上的投影。
根据上述公式,我们可以将极坐标系中的点转换为直角坐标系中的坐标。
补充说明需要注意的是,在进行坐标转换时,我们需要考虑到各个象限的特殊情况。
例如,在进行极坐标转换为直角坐标时,如果 x 轴上的点 P 位于第二或第三象限,则计算公式中的极角θ 需要加上或减去π(pi)来获得正确的结果。
直角坐标和极坐标互化公式

直角坐标和极坐标互化公式坐标系,这东西说起来似乎很专业,但其实咱们平时也常接触到。
想象一下,直角坐标和极坐标就是两种不同的“地图”来帮我们定位。
今天咱们就来聊聊这两种坐标系怎么互相转化,轻松搞定数学难题。
1. 什么是直角坐标和极坐标?1.1 直角坐标首先,直角坐标系其实就是大家熟悉的“平面坐标系”。
咱们用两个轴——横轴和纵轴来表示位置。
想象一下,你在一个大平面上,位置用 (x, y) 来标记。
比如说,你在书桌上的一个小角落,这时候你的坐标就是那两个轴上的距离。
1.2 极坐标而极坐标系就有点像你在超大的圆圈里找位置。
这里用两个参数来描述一个点的位置:一个是半径 r,另一个是角度θ。
r 就是从原点到你所在点的直线距离,θ 则是从某个固定方向(通常是水平轴)开始,旋转到你那点的位置的角度。
简单来说,就是你离原点有多远,以及你朝哪个方向看。
2. 直角坐标和极坐标怎么互化?2.1 从极坐标到直角坐标我们首先来看看怎么把极坐标转成直角坐标。
假设你有极坐标(r, θ),也就是你离原点 r 距离,和角度θ。
要把它转成直角坐标系下的 (x, y),其实很简单。
x = r * co s(θ)y = r * sin(θ)打个比方,你在一个大圆的某个位置,你离原点的距离 r 就是你直线上的长度,cos 和 sin 就是帮助你找到在横轴和纵轴上的位置。
好比你从一个位置出发,沿着某个方向走了 r 米,然后转了角度θ,最后就在直角坐标上找到了你的位置。
2.2 从直角坐标到极坐标那反过来呢?怎么把直角坐标转换为极坐标呢?假设你有直角坐标 (x, y),要找到对应的极坐标(r, θ)。
r = √(x² + y²)θ = arctan(y / x)这里 r 就是你到原点的直线距离,通过勾股定理就能算出。
θ 就是用 arctan 函数(也就是反正切函数)来算出你相对于横轴的角度。
换句话说,你先算出你离原点有多远,然后再找到你面对的方向。
直角坐标与极坐标的互化公式

直角坐标与极坐标的互化公式引言在数学中,我们经常使用两种不同的坐标系来描述点的位置,即直角坐标系和极坐标系。
直角坐标系是我们最为熟悉的坐标系,它使用直角的方法确定点的位置。
而极坐标系则使用极径和极角来确定点的位置。
在特定的问题中,我们可能需要将一个坐标系中的点转换到另一个坐标系中,这就涉及到直角坐标与极坐标的互化公式。
直角坐标到极坐标的转换公式给定直角坐标系中的点P(x, y),我们可以根据一些公式将其转换为极坐标系。
其中,极径r表示点P到原点O的距离,而极角θ表示点P在直角坐标系中与x轴之间的夹角。
要将直角坐标系中的点P(x, y)转换为极坐标系中的点(r, θ),我们可以使用以下公式:$r = \\sqrt{x^2 + y^2}$$\\theta = \\arctan\\left(\\frac{y}{x}\\right)$这两个公式允许我们根据直角坐标系中的点的坐标值,计算出其在极坐标系中的位置。
极坐标到直角坐标的转换公式同样地,给定极坐标系中的点(r, θ),我们可以使用另一组公式将其转换为直角坐标系中的点。
根据极坐标到直角坐标的转换公式,我们可以得到以下结果:$x = r \\cdot \\cos(\\theta)$$y = r \\cdot \\sin(\\theta)$这两个公式允许我们根据极坐标系中的点的极径和极角,计算出其在直角坐标系中的位置。
举例说明为了更好地理解直角坐标与极坐标的互化公式,我们来看一个具体的例子。
假设有一个直角坐标系中的点P(3, 4),我们想将其转换为极坐标系中的点。
首先,我们可以使用公式$r = \\sqrt{x^2 + y^2}$计算出极径r:$r = \\sqrt{3^2 + 4^2} = \\sqrt{9 + 16} = \\sqrt{25} = 5$接下来,我们可以使用公式$\\theta = \\arctan\\left(\\frac{y}{x}\\right)$计算出极角θ:$\\theta = \\arctan\\left(\\frac{4}{3}\\right) \\approx 0.93$因此,直角坐标系中的点P(3, 4)在极坐标系中的表示为(5, 0.93)。
直角坐标与极坐标的互化公式

直角坐标与极坐标的互化公式直角坐标与极坐标是数学中常用的两种坐标系。
两者相互转换的公式被称为互化公式。
在本文中,我将详细介绍直角坐标与极坐标的互化公式及其应用。
一、直角坐标系直角坐标系是我们常见的坐标系,也被称为笛卡尔坐标系。
在直角坐标系中,我们使用两个垂直的坐标轴x和y来表示平面上的点。
点的位置可以通过它在x轴和y轴上的坐标来确定。
二、极坐标系极坐标系则是利用点到原点的距离和点与正x轴的夹角来表示点的位置。
在极坐标系中,我们用r表示点到原点的距离,用θ表示点与正x轴的夹角。
极坐标系适用于描述圆形、旋转等问题。
三、直角坐标转换为极坐标要将直角坐标转换为极坐标,我们需要使用以下公式:r = √(x^2 + y^2)θ = arctan(y/x)其中,r为点到原点的距离,x和y分别为点在x轴和y轴上的坐标。
arctan为反正切函数,用于计算夹角θ。
四、极坐标转换为直角坐标要将极坐标转换为直角坐标,我们需要使用以下公式:x = r * cos(θ)y = r * sin(θ)其中,x和y分别为点在x轴和y轴上的坐标,r为点到原点的距离,θ为点与正x轴的夹角。
cos和sin分别为余弦和正弦函数。
五、互化公式的应用直角坐标与极坐标之间的互化公式在很多数学和物理问题中都有广泛的应用。
例如,在天文学中,我们可以使用极坐标系来描述天体的位置和运动;在工程学中,我们可以使用直角坐标系来描述物体在空间中的位置和方向。
互化公式也可以帮助我们更方便地计算一些复杂的问题。
例如,当我们需要计算一个复杂图形的面积时,可以将其分割成多个简单的部分,然后分别计算每个部分的面积,并将它们相加。
在直角坐标系中,这个过程可能会非常复杂。
但是如果我们将图形转换为极坐标系,那么计算每个部分的面积就会变得简单很多,因为在极坐标系中,面积的计算公式更加简洁。
六、总结直角坐标与极坐标是常见的坐标系,它们之间的互化公式可以帮助我们方便地进行坐标转换。
直角坐标和极坐标的互化公式
直角坐标和极坐标的互化公式1. 引言在数学和物理学中,直角坐标系和极坐标系是两种常用的坐标系。
它们可以相互转化,通过互化公式可以方便地在不同坐标系下描述出同一个点。
2. 直角坐标系直角坐标系是平面上最常见的坐标系。
它由两个相互垂直的坐标轴组成,通常表示为x轴和y轴。
每个点都可以由一个有序数对(x, y)来表示,其中x代表点在x轴上的位置,y代表点在y轴上的位置。
3. 极坐标系极坐标系是另一种描述平面上点位置的坐标系。
在极坐标系中,每个点由一个有序数对(r, θ)表示,其中r代表点到原点的距离,θ代表从x轴逆时针旋转到点所需的角度。
4. 直角坐标和极坐标的转化公式4.1 极坐标转直角坐标给定一个极坐标点P(r, θ),要将其转化为直角坐标系下的点(x, y),可以使用以下公式:x = r * cos(θ)y = r * sin(θ)其中,cos和sin分别是余弦和正弦函数。
4.2 直角坐标转极坐标给定一个直角坐标系下的点(x, y),要将其转化为极坐标系下的点P(r, θ),可以使用以下公式:r = sqrt(x² + y²)θ = arctan(y / x)其中,sqrt代表平方根,arctan代表反正切函数。
5. 举例说明为了更好地理解直角坐标和极坐标的互化公式,以下举例说明。
例1:将极坐标点P(3, π/4)转换为直角坐标系下的点。
根据公式可得:x = 3 * cos(π/4) ≈ 2.12y = 3 * sin(π/4) ≈ 2.12因此,极坐标点P(3, π/4)在直角坐标系下的表示为(x, y) ≈ (2.12, 2.12)。
例2:将直角坐标系下的点(-1, -1)转换为极坐标系下的点。
根据公式可得:r = sqrt((-1)² + (-1)²) ≈ 1.41θ = arctan((-1) / (-1)) ≈ π + π/4 ≈ 5π/4因此,直角坐标点(-1, -1)在极坐标系下的表示为P(1.41, 5π/4)。
直角坐标与极坐标的换算
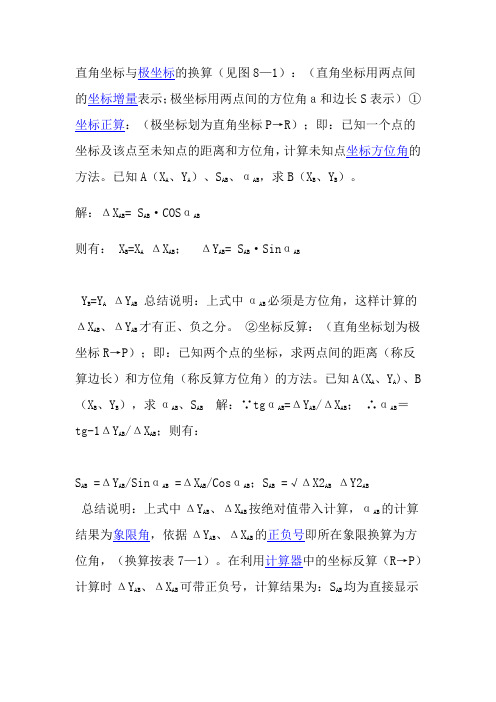
直角坐标与极坐标的换算(见图8—1):(直角坐标用两点间的坐标增量表示;极坐标用两点间的方位角a和边长S表示)①坐标正算:(极坐标划为直角坐标P→R);即:已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角的方法。
已知A(X A、Y A)、S AB、αAB,求B(X B、Y B)。
解:ΔX AB= S AB·COSαAB
则有: X B=X AΔX AB;ΔY AB= S AB·SinαAB
Y B=Y AΔY AB总结说明:上式中αAB必须是方位角,这样计算的ΔX AB、ΔY AB才有正、负之分。
②坐标反算:(直角坐标划为极坐标R→P);即:已知两个点的坐标,求两点间的距离(称反算边长)和方位角(称反算方位角)的方法。
已知A(X A、Y A)、B (X B、Y B),求αAB、S AB解:∵tgαAB=ΔY AB/ΔX AB;∴αAB=
tg-1ΔY AB/ΔX AB;则有:
S AB =ΔY AB/SinαAB =ΔX AB/CosαAB;S AB=√ΔX2ABΔY2AB
总结说明:上式中ΔY AB、ΔX AB按绝对值带入计算,αAB的计算结果为象限角,依据ΔY AB、ΔX AB的正负号即所在象限换算为方位角,(换算按表7—1)。
在利用计算器中的坐标反算(R→P)计算时ΔY AB、ΔX AB可带正负号,计算结果为:S AB均为直接显示
的数值;αAB在Ⅰ、Ⅱ直接显示的数值为方位角,在Ⅲ、Ⅳ为显示数值加360后为方位角。
极坐标与直角坐标的转换(含圆的极坐标方程)
已知一个圆的方程是=5 3 cos 5sin
=5 3 cos-5 sin 即化为直角坐标为
2
x y 5 3x 5 y
2 2
5 3 2 5 2 化为标准方程是 (x ) ( y ) 25 2 2 5 3 5 所以圆心为 ( , ),半径是5
练习: 1、曲线的极坐标方程=4sin 化为直角坐标
直角坐标是 (x, y)
x=ρcosθ, y=ρsinθ
将下列直角坐标转化为极坐标 (1) (-1,3) (2) (-2,-2)
π π 例3 已知两点(2, ),(3, )=
6 用余弦定理求 AB的长即可.
A o
x
简单曲线的极坐标方程
求下列圆的极坐标方程 (1)中心在极点,半径为r;
(2)直角坐标方程2 x-y+1 0的极坐标 方程为_______ 方程为_______ (4)直角坐标方程x 3的极坐标 方程为_______ (3)直角坐标方程x 2 y 2 9的极坐标
2 cos sin 1 0
3
cos 3
2 2 方程_________
2.曲线极坐标方程cos( -
x ( y 2) 4
6 标方程_________
)=1化为直角坐
3 x y20
例2: (1)直角坐标方程x y 2 x 3 y 0的极坐标
2 2
方程为_______ -2 cos
2
3 sin 0
(2)中心在C(a,0),半径为a; (3)中心在(a,/2),半径为a; (4)中心在C(a,0),半径为a
=r
=2acos
=2asin
=2a cos( 0 )
matlab直角坐标系转换极坐标

Matlab直角坐标系转换极坐标在数学和物理学中,直角坐标系和极坐标系是常见的两种坐标系。
直角坐标系使用(x,y)的形式表示点的位置,而极坐标系使用$(r,\\theta)$的形式表示。
在Matlab中,我们可以很方便地进行直角坐标系和极坐标系之间的转换,以满足不同问题的需求。
直角坐标系转换极坐标在Matlab中,使用cart2pol函数将直角坐标系转换为极坐标系。
该函数接受两个输入参数,(x,y)表示点的直角坐标,返回对应的极坐标$(r,\\theta)$。
以下是一个简单的示例,展示如何使用cart2pol函数进行直角坐标和极坐标之间的转换:x = 3;y = 4;[r, theta] = cart2pol(x, y);fprintf('直角坐标 (%.2f, %.2f) 转换为极坐标 (%.2f, %.2f)\', x, y, r, theta);运行上述代码,将得到输出结果:直角坐标 (3.00, 4.00) 转换为极坐标 (5.00, 0.93)上述代码中,我们定义了一个直角坐标(x,y),分别为3和4。
然后使用cart2pol函数将直角坐标转换为极坐标。
最后,使用fprintf函数输出结果。
极坐标转换直角坐标系与直角坐标系转换为极坐标相反,我们可以使用pol2cart函数将极坐标转换为直角坐标系。
该函数接受两个输入参数,$(r,\\theta)$表示点的极坐标,返回对应的直角坐标(x,y)。
以下是一个示例,展示如何使用pol2cart函数进行极坐标和直角坐标之间的转换:r = 5;theta = pi/4;[x, y] = pol2cart(theta, r);fprintf('极坐标 (%.2f, %.2f) 转换为直角坐标 (%.2f, %.2f)\', r, theta, x, y);运行上述代码,将得到输出结果:极坐标 (5.00, 0.80) 转换为直角坐标 (2.50, 2.50)上述代码中,我们定义了一个极坐标$(r,\\theta)$,其中r为5,$\\theta$为$\\pi/4$。
python直角坐标转换极坐标函数

python直角坐标转换极坐标函数Python是一种高级编程语言,它具有强大的功能和灵活性,可以用来编写各种类型的程序。
其中,Python直角坐标转换极坐标函数是一种非常有用的函数,可以将直角坐标系中的点转换为极坐标系中的点。
Python直角坐标转换极坐标函数的基本原理是利用三角函数的关系,将直角坐标系中的点的坐标转换为极坐标系中的点的坐标。
具体来说,我们可以使用以下公式将直角坐标系中的点(x,y)转换为极坐标系中的点(r,θ):r = sqrt(x^2 + y^2)θ = arctan(y/x)其中,sqrt()函数用于计算平方根,arctan()函数用于计算反正切值。
需要注意的是,由于arctan()函数的返回值范围是[-π/2,π/2],因此我们需要根据点的位置来确定θ的值。
在Python中,我们可以使用math库中的sqrt()和atan2()函数来实现直角坐标转换极坐标的功能。
具体的代码如下:import mathdef cartesian_to_polar(x, y):r = math.sqrt(x**2 + y**2)theta = math.atan2(y, x)return (r, theta)其中,cartesian_to_polar()函数接受两个参数x和y,表示直角坐标系中的点的坐标。
函数返回一个元组,包含极坐标系中的点的坐标(r,θ)。
使用该函数非常简单,只需要传入直角坐标系中的点的坐标即可。
例如,我们可以使用以下代码将点(3,4)转换为极坐标系中的点:result = cartesian_to_polar(3, 4)print(result)输出结果为:(5.0, 0.93)其中,5.0表示点(3,4)到原点的距离,0.93表示点(3,4)与x轴正半轴的夹角。
总之,Python直角坐标转换极坐标函数是一种非常有用的函数,可以帮助我们将直角坐标系中的点转换为极坐标系中的点。
直角坐标系换成极坐标系

直角坐标系换成极坐标系直角坐标系(Cartesian coordinate system)和极坐标系(polar coordinate system)是两种常见的坐标表示方式。
直角坐标系以直角坐标形式(x,y)表示点的位置,而极坐标系则将点的位置表示为(r,θ)。
在某些情况下,将直角坐标系转换为极坐标系可以简化问题的分析和计算。
在本文中,我们将讨论如何将直角坐标系转换为极坐标系,并研究这种转换在实际应用中的一些例子。
直角坐标系到极坐标系的转换公式在直角坐标系中,每个点的位置由其水平距离(x)和垂直距离(y)确定。
而在极坐标系中,每个点的位置由它与原点的距离(r)和与正x轴的夹角(θ)确定。
我们可以使用以下公式将直角坐标系的点(x, y)转换为极坐标系的点(r, θ):r = √(x^2 + y^2)θ = arctan(y/x)其中,√表示开平方,arctan表示反正切函数。
从直角坐标系到极坐标系的转换例子例子1:从直角坐标系到极坐标系假设我们有一个点P(3, 4),我们想要将其转换为极坐标系中的点(r, θ)。
根据转换公式,我们可以计算:r = √(3^2 + 4^2) = √(9 + 16) = √25 = 5θ = arctan(4/3) ≈ 53.13°因此,点P(3, 4)在极坐标系中的表示为(5, 53.13°)。
例子2:直角坐标系中的直线转换为极坐标系现在,让我们考虑直角坐标系中的一条直线,其方程为y = x。
为了将其转换为极坐标系中的方程,我们应用之前的转换公式。
假设在直角坐标系中的某个点P(x, x)在极坐标系中的表示为(r, θ)。
根据转换公式,我们可以计算:r = √(x^2 + x^2) = √2x^2 = x√2θ = arctan((x/x) = arctan(1) = 45°因此,直线y = x在极坐标系中的方程为r = x√2,θ = 45°。
直角坐标方程怎么化为极坐标方程式
直角坐标方程怎么化为极坐标方程式在解析几何中,直角坐标系和极坐标系是常用的两种坐标系。
直角坐标表示平面上的点,通过横坐标和纵坐标的组合来确定点的位置。
而极坐标系则使用极径和极角来表示点的位置。
将直角坐标方程转化为极坐标方程可以帮助我们更好地描述曲线性质和解决一些特定问题。
要将直角坐标方程转化为极坐标方程,我们需要了解直角坐标系和极坐标系之间的转换关系。
接下来,我将详细介绍这个过程以及一些常见的转换方法。
直角坐标系和极坐标系的转换关系在直角坐标系中,每个点的坐标表示为(x, y),其中x代表点在横轴上的位置,y代表点在纵轴上的位置。
而在极坐标系中,每个点的位置由极径r和极角θ确定。
直角坐标系到极坐标系的转换公式如下:•极径r的计算: $r = \\sqrt{x^2 + y^2}$•极角θ的计算: $\\theta = \\arctan \\left(\\frac{y}{x}\\right)$同样地,从极坐标系到直角坐标系的转换公式如下:•x的计算: $x = r\\cos(\\theta)$•y的计算: $y = r\\sin(\\theta)$通过这些转换公式,我们可以将直角坐标方程转化为极坐标方程。
将直角坐标方程转化为极坐标方程的方法方法一:代入x和y的计算公式将直角坐标方程中的x和y分别用极坐标系的公式表示,即$x =r\\cos(\\theta)$和$y = r\\sin(\\theta)$。
然后将这两个公式代入直角坐标方程中,消去x和y,最终得到极坐标方程。
例如,对于直角坐标方程x2+y2=4,代入x和y的计算公式后得到$r^2\\cos^2(\\theta) + r^2\\sin^2(\\theta) = 4$。
简化化简这个方程,我们可以得到$r^2(\\cos^2(\\theta)+\\sin^2(\\theta)) = 4$,由于$\\cos^2(\\theta)+\\sin^2(\\theta) = 1$,所以最终的极坐标方程为r2=4。
图像直角坐标系向对数极坐标转换的有关代码
新的对数极变换的代码%function[rout,g,b]=LHimlogpolar(image,Nrho,Ntheta,Method,Center,Shap e)function [rout,g,b] = LHimlogpolar(varargin)%IMLOGPOLAR Compute logarithmic polar transformation of image.% B = IMLOGPOLAR(A,NRHO,NTHETA,METHOD) computes the logarithmic% polar transformation of image A, generating a log polar image% of size NRHO by NTHETA. METHOD describes the interpolation% method. METHOD is a string that can have one of these values:%% 'nearest' (default) nearest neighbor interpolation%% 'bilinear' bilinear interpolation%% 'bicubic' bicubic interpolation%% If you omit the METHOD argument, IMLOGPOLAR uses the default% method of 'nearest'.%% B = IMLOGPOLAR(A,NRHO,NTHETA,METHOD,CTR) assumes that the 2x1% vector CTR contains the coordinates of the origin in image A.% If CTR is not supplied, the default is CTR = [(m+1)/2,(n+1)/2],% where A has n rows and m columns.%% B = IMLOGPOLAR(A,NRHO,NTHETA,METHOD,CTR,SHAPE) where SHAPE is a% string that can have one of these values:%% 'full' - returns log polar transformation containing ALL% pixels from image A (the circumscribed circle% centered at CTR)%% 'valid' - returns log polar transformation containing only% pixels from the largest inscribed circle in image A % centered at CTR.%% If you omit the SHAPE argument, IMLOGPOLAR uses the default shape % of 'valid'. If you specify the shape 'full', invalid values on the % periphery of B are set to NaN.%% Class Support% -------------% The input image can be of class uint8 or double. The output% image is of the same class as the input image.%% Example% -------% I = imread('ic.tif');% J = imlogpolar(I,64,64,'bilinear');% imshow(I), figure, imshow(J)%% See also IMCROP, IMRESIZE, IMROTATE.% Nathan D. Cahill 8-16-01, modified from:% Clay M. Thompson 8-4-92% Copyright 1993-1998 The MathWorks, Inc. All Rights Reserved.% $Revision: 5.10 $ $Date: 1997/11/24 15:35:33 $% Grandfathered:% Without output arguments, IMLOGPOLAR(...) displays the transformed % image in the current axis.% Outputs: A the input image% Nrho the desired number of rows of transformed image% Ntheta the desired number of columns of transformed image % Method interpolation method (nearest,bilinear,bicubic)% Center origin of input image% Shape output size (full,valid)% Class storage class of A[Image,rows,cols,Nrho,Ntheta,Method,Center,Shape,ClassIn]=LHparse_inp uts(varargin{:});threeD = (ndims(Image)==3); % Determine if input includes a 3-D arrayif threeD,[r,g,b] = LHtransformImage(Image,rows,cols,Nrho,Ntheta,Method,Center,Shape);if nargout==0,imshow(r,g,b);return;elseif nargout==1,if strcmp(ClassIn,'uint8');rout = repmat(uint8(0),[size(r),3]);rout(:,:,1) = uint8(round(r*255));rout(:,:,2) = uint8(round(g*255));rout(:,:,3) = uint8(round(b*255));elserout = zeros([size(r),3]);rout(:,:,1) = r;rout(:,:,2) = g;rout(:,:,3) = b;endelse % nargout==3if strcmp(ClassIn,'uint8')rout = uint8(round(r*255));g = uint8(round(g*255));b = uint8(round(b*255));elserout = r; % g,b are already defined correctly above endendelser = LHtransformImage(Image,rows,cols,Nrho,Ntheta,Method,Center,Shape);if nargout==0,imshow(r);return;endif strcmp(ClassIn,'uint8')if islogical(image)r = im2uint8(logical(round(r)));elser = im2uint8(r);endendrout = r;endfunction [A,Ar,Ac,Nrho,Ntheta,Method,Center,Shape,Class] = LHparse_inputs(varargin)% Outputs: A the input image% Nrho the desired number of rows of transformed image % Ntheta the desired number of columns of transformed image % Method interpolation method (nearest,bilinear,bicubic)% Center origin of input image% Shape output size (full,valid)% Class storage class of Aerror(nargchk(3,6,nargin));A = varargin{1};Ar = size(A,1); % Ar = number of rows of the input imageAc = size(A,2); % Ac = number of columns of the input imageNrho = varargin{2};Ntheta = varargin{3};Class = class(A);if nargin < 4Method = '';elseMethod = varargin{4};endif isempty(Method)Method = 'nearest';endMethod = lower(Method);if ~any(strcmp(Method,{'nearest','bilinear','bicubic'}))error('Method must be one of ''nearest'', ''bilinear'', or ''bicubic''.');endif nargin < 5Center = [];elseCenter = varargin{5};endif isempty(Center)Center = [(Ac+1)/2 (Ar+1)/2];endif length(Center(:))~=2error('Center should be 1x2 array.');endif any(Center(:)>[Ac;Ar] | Center(:)<1)% THIS LINE USED TO READ 'ifany(Center(:)>[Ar;Ac] | Center(:)<1)' but Ar and Ac should be swapped round -- look at line 40 for whty this should be. A.I.Wilmer,12th Oct 2002num2str(['Center is',num2str(Center(1)),',',num2str(Center(2)),'with size of image =',num2str(Ar),'x',num2str(Ac),' (rows,columns)']);warning('Center supplied is not within image boundaries.');endif nargin < 6Shape = '';elseShape = varargin{6};endif isempty(Shape)Shape = 'valid';endShape = lower(Shape);if ~any(strcmp(Shape,{'full','valid'}))error('Shape must be one of ''full'' or ''valid''.');endif isa(A, 'uint8'), % Convert A to Double grayscale for interpolation if islogical(A)A = double(A);elseA = double(A)/255;endendfunction [r,g,b] = LHtransformImage(A,Ar,Ac,Nrho,Ntheta,Method,Center,Shape)% Inputs: A the input image% Nrho the desired number of rows of transformed image% Ntheta the desired number of columns of transformed image % Method interpolation method (nearest,bilinear,bicubic)% Center origin of input image% Shape output size (full,valid)% Class storage class of Aglobal rho;theta = linspace(0,2*pi,Ntheta+1); theta(end) = [];switch Shapecase 'full'corners = [1 1;Ar 1;Ar Ac;1 Ac];d = max(sqrt(sum((repmat(Center(:)',4,1)-corners).^2,2)));case 'valid'd = min([Ac-Center(1) Center(1)-1 Ar-Center(2) Center(2)-1]);endminScale = 1;rho = logspace(log10(minScale),log10(d),Nrho)'; % default 'base 10' logspace - play with d to change the scale of the log axis% convert polar coordinates to cartesian coordinates and centerxx = rho*cos(theta+pi) + Center(1);yy = rho*sin(theta+pi) + Center(2);if nargout==3if strcmp(Method,'nearest'), % Nearest neighbor interpolation[xi,yi] = meshgrid(-3:.1:3,-3:.1:3)r=interp2(A(:,:,1),xx,yy,'nearest');g=interp2(A(:,:,2),xx,yy,'nearest');b=interp2(A(:,:,3),xx,yy,'nearest');elseif strcmp(Method,'bilinear'), % Linear interpolationr=interp2(A(:,:,1),xx,yy,'linear');g=interp2(A(:,:,2),xx,yy,'linear');b=interp2(A(:,:,3),xx,yy,'linear');elseif strcmp(Method,'bicubic'), % Cubic interpolationr=interp2(A(:,:,1),xx,yy,'cubic');g=interp2(A(:,:,2),xx,yy,'cubic');b=interp2(A(:,:,3),xx,yy,'cubic');elseerror(['Unknown interpolation method: ',method]);end% any pixels outside , pad with blackmask= (xx>Ac) | (xx<1) | (yy>Ar) | (yy<1);r(mask)=NaN;g(mask)=NaN;b(mask)=NaN;elseif strcmp(Method,'nearest'), % Nearest neighbor interpolation r=interp2(A,xx,yy,'nearest');%r=interp2(A,xx,yy,'nearest');elseif strcmp(Method,'bilinear'), % Linear interpolationsize(A)r=interp2(A,xx,yy,'linear');%r=interp2(A,xx,yy,'linear');elseif strcmp(Method,'bicubic'), % Cubic interpolationr=interp2(A,xx,yy,'cubic');%r=interp2(A,xx,yy,'cubic');elseerror(['Unknown interpolation method: ',method]);end% any pixels outside warp, pad with blackmask= (xx>Ac) | (xx<1) | (yy>Ar) | (yy<1);r(mask)=NaN;end。
直角坐标系怎么转化为极坐标系
直角坐标系如何转换为极坐标系直角坐标系和极坐标系是数学中常见的两种坐标系。
直角坐标系使用x轴和y 轴来表示点的位置,而极坐标系则使用径向和极角来表示点的位置。
了解直角坐标系如何转换为极坐标系对于解决一些问题非常重要。
本文将介绍直角坐标系转换为极坐标系的方法和公式。
直角坐标系和极坐标系的差异在直角坐标系中,一个点的位置可以由它在x轴和y轴上的坐标来确定,通常表示为 (x, y)。
x轴和y轴构成了直角坐标系的基准轴。
相反,在极坐标系中,一个点的位置由它距离原点的距离和与正向x轴的夹角来确定。
距离通常用r表示,而夹角通常用θ表示。
直角坐标系到极坐标系的转换公式有了上述背景知识,我们可以开始讨论如何将直角坐标系转换为极坐标系。
下面是直角坐标系到极坐标系的转换公式:1.距离r的计算公式:公式1公式1其中,x和y分别是点在直角坐标系中的横坐标和纵坐标。
2.极角θ的计算公式:公式2公式2注意,上述公式中的arctan函数在计算机中通常使用反正切函数来表示,可以通过常见的数学函数库进行计算。
实际应用举例下面通过一个实际应用的例子来展示如何将直角坐标系转换为极坐标系。
假设有一个直角坐标系中的点A,其坐标为 (3, 4)。
我们想要将这个点的坐标转换为极坐标系。
首先,我们可以使用公式1计算距离r:计算r计算r根据公式2,我们可以计算极角θ:计算θ计算θ因此,点A在极坐标系中的坐标为 (5, 0.93)。
总结本文介绍了直角坐标系如何转换为极坐标系。
通过使用距离和极角的计算公式,我们可以将点从直角坐标系的位置转换为极坐标系的位置。
这种转换对于在解决问题时更方便地描述和分析点的位置很有帮助。
希望本文对理解直角坐标系和极坐标系之间的转换关系有所帮助。
关于计算器进行直角坐标极坐标转换的说明
首先,你得先确保你计算机上有这两个键“Pol”
和“Rec”
这两个键的功能分别是
Pol:直角坐标系坐标转换为极坐标系坐标
Rec:极坐标系坐标转化为直角坐标系坐标
因为正常模式下该两键的功能为加减,所以需要先进
行模式转换,需要按一下“shift”键,在计算器左上
角。
然后完成模式转换,加减号的功能转变为Pol和Rec的功能
还需要用到逗号,即“,”,使用方法与Pol和Rec相同。
以直角坐标系坐标(√2,√2)和极坐标(2,45)为例
直角坐标系坐标转换为极坐标系坐标
按下shift之后,按下Pol键(+号),输入√2,√2
后运行,得到结果,对应了极坐标(2,45),如图
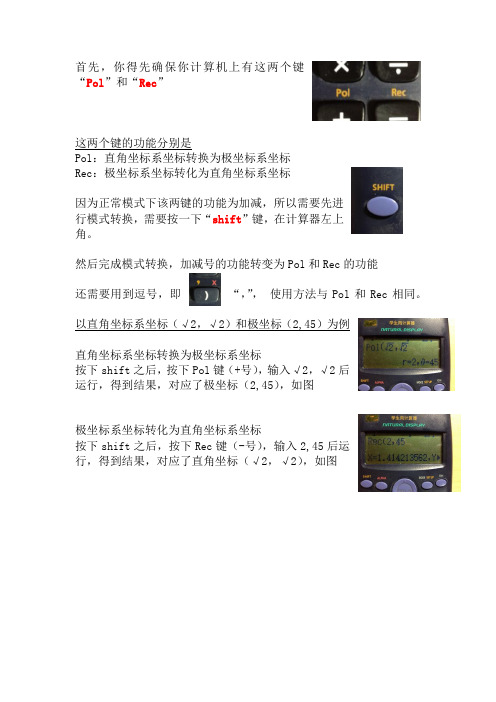
极坐标系坐标转化为直角坐标系坐标
按下shift之后,按下Rec键(-号),输入2,45后运
行,得到结果,对应了直角坐标(√2,√2),如图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新的对数极变换的代码%function[rout,g,b]=LHimlogpolar(image,Nrho,Ntheta,Method,Center,Shap e)function [rout,g,b] = LHimlogpolar(varargin)%IMLOGPOLAR Compute logarithmic polar transformation of image.% B = IMLOGPOLAR(A,NRHO,NTHETA,METHOD) computes the logarithmic% polar transformation of image A, generating a log polar image% of size NRHO by NTHETA. METHOD describes the interpolation% method. METHOD is a string that can have one of these values:%% 'nearest' (default) nearest neighbor interpolation%% 'bilinear' bilinear interpolation%% 'bicubic' bicubic interpolation%% If you omit the METHOD argument, IMLOGPOLAR uses the default% method of 'nearest'.%% B = IMLOGPOLAR(A,NRHO,NTHETA,METHOD,CTR) assumes that the 2x1% vector CTR contains the coordinates of the origin in image A.% If CTR is not supplied, the default is CTR = [(m+1)/2,(n+1)/2],% where A has n rows and m columns.%% B = IMLOGPOLAR(A,NRHO,NTHETA,METHOD,CTR,SHAPE) where SHAPE is a% string that can have one of these values:%% 'full' - returns log polar transformation containing ALL% pixels from image A (the circumscribed circle% centered at CTR)%% 'valid' - returns log polar transformation containing only% pixels from the largest inscribed circle in image A % centered at CTR.%% If you omit the SHAPE argument, IMLOGPOLAR uses the default shape % of 'valid'. If you specify the shape 'full', invalid values on the % periphery of B are set to NaN.%% Class Support% -------------% The input image can be of class uint8 or double. The output% image is of the same class as the input image.%% Example% -------% I = imread('ic.tif');% J = imlogpolar(I,64,64,'bilinear');% imshow(I), figure, imshow(J)%% See also IMCROP, IMRESIZE, IMROTATE.% Nathan D. Cahill 8-16-01, modified from:% Clay M. Thompson 8-4-92% Copyright 1993-1998 The MathWorks, Inc. All Rights Reserved.% $Revision: 5.10 $ $Date: 1997/11/24 15:35:33 $% Grandfathered:% Without output arguments, IMLOGPOLAR(...) displays the transformed % image in the current axis.% Outputs: A the input image% Nrho the desired number of rows of transformed image% Ntheta the desired number of columns of transformed image % Method interpolation method (nearest,bilinear,bicubic)% Center origin of input image% Shape output size (full,valid)% Class storage class of A[Image,rows,cols,Nrho,Ntheta,Method,Center,Shape,ClassIn]=LHparse_inp uts(varargin{:});threeD = (ndims(Image)==3); % Determine if input includes a 3-D arrayif threeD,[r,g,b] = LHtransformImage(Image,rows,cols,Nrho,Ntheta,Method,Center,Shape);if nargout==0,imshow(r,g,b);return;elseif nargout==1,if strcmp(ClassIn,'uint8');rout = repmat(uint8(0),[size(r),3]);rout(:,:,1) = uint8(round(r*255));rout(:,:,2) = uint8(round(g*255));rout(:,:,3) = uint8(round(b*255));elserout = zeros([size(r),3]);rout(:,:,1) = r;rout(:,:,2) = g;rout(:,:,3) = b;endelse % nargout==3if strcmp(ClassIn,'uint8')rout = uint8(round(r*255));g = uint8(round(g*255));b = uint8(round(b*255));elserout = r; % g,b are already defined correctly above endendelser = LHtransformImage(Image,rows,cols,Nrho,Ntheta,Method,Center,Shape);if nargout==0,imshow(r);return;endif strcmp(ClassIn,'uint8')if islogical(image)r = im2uint8(logical(round(r)));elser = im2uint8(r);endendrout = r;endfunction [A,Ar,Ac,Nrho,Ntheta,Method,Center,Shape,Class] = LHparse_inputs(varargin)% Outputs: A the input image% Nrho the desired number of rows of transformed image % Ntheta the desired number of columns of transformed image % Method interpolation method (nearest,bilinear,bicubic)% Center origin of input image% Shape output size (full,valid)% Class storage class of Aerror(nargchk(3,6,nargin));A = varargin{1};Ar = size(A,1); % Ar = number of rows of the input imageAc = size(A,2); % Ac = number of columns of the input imageNrho = varargin{2};Ntheta = varargin{3};Class = class(A);if nargin < 4Method = '';elseMethod = varargin{4};endif isempty(Method)Method = 'nearest';endMethod = lower(Method);if ~any(strcmp(Method,{'nearest','bilinear','bicubic'}))error('Method must be one of ''nearest'', ''bilinear'', or ''bicubic''.');endif nargin < 5Center = [];elseCenter = varargin{5};endif isempty(Center)Center = [(Ac+1)/2 (Ar+1)/2];endif length(Center(:))~=2error('Center should be 1x2 array.');endif any(Center(:)>[Ac;Ar] | Center(:)<1)% THIS LINE USED TO READ 'ifany(Center(:)>[Ar;Ac] | Center(:)<1)' but Ar and Ac should be swapped round -- look at line 40 for whty this should be. A.I.Wilmer,12th Oct 2002num2str(['Center is',num2str(Center(1)),',',num2str(Center(2)),'with size of image =',num2str(Ar),'x',num2str(Ac),' (rows,columns)']);warning('Center supplied is not within image boundaries.');endif nargin < 6Shape = '';elseShape = varargin{6};endif isempty(Shape)Shape = 'valid';endShape = lower(Shape);if ~any(strcmp(Shape,{'full','valid'}))error('Shape must be one of ''full'' or ''valid''.');endif isa(A, 'uint8'), % Convert A to Double grayscale for interpolation if islogical(A)A = double(A);elseA = double(A)/255;endendfunction [r,g,b] = LHtransformImage(A,Ar,Ac,Nrho,Ntheta,Method,Center,Shape)% Inputs: A the input image% Nrho the desired number of rows of transformed image% Ntheta the desired number of columns of transformed image % Method interpolation method (nearest,bilinear,bicubic)% Center origin of input image% Shape output size (full,valid)% Class storage class of Aglobal rho;theta = linspace(0,2*pi,Ntheta+1); theta(end) = [];switch Shapecase 'full'corners = [1 1;Ar 1;Ar Ac;1 Ac];d = max(sqrt(sum((repmat(Center(:)',4,1)-corners).^2,2)));case 'valid'd = min([Ac-Center(1) Center(1)-1 Ar-Center(2) Center(2)-1]);endminScale = 1;rho = logspace(log10(minScale),log10(d),Nrho)'; % default 'base 10' logspace - play with d to change the scale of the log axis% convert polar coordinates to cartesian coordinates and centerxx = rho*cos(theta+pi) + Center(1);yy = rho*sin(theta+pi) + Center(2);if nargout==3if strcmp(Method,'nearest'), % Nearest neighbor interpolation[xi,yi] = meshgrid(-3:.1:3,-3:.1:3)r=interp2(A(:,:,1),xx,yy,'nearest');g=interp2(A(:,:,2),xx,yy,'nearest');b=interp2(A(:,:,3),xx,yy,'nearest');elseif strcmp(Method,'bilinear'), % Linear interpolationr=interp2(A(:,:,1),xx,yy,'linear');g=interp2(A(:,:,2),xx,yy,'linear');b=interp2(A(:,:,3),xx,yy,'linear');elseif strcmp(Method,'bicubic'), % Cubic interpolationr=interp2(A(:,:,1),xx,yy,'cubic');g=interp2(A(:,:,2),xx,yy,'cubic');b=interp2(A(:,:,3),xx,yy,'cubic');elseerror(['Unknown interpolation method: ',method]);end% any pixels outside , pad with blackmask= (xx>Ac) | (xx<1) | (yy>Ar) | (yy<1);r(mask)=NaN;g(mask)=NaN;b(mask)=NaN;elseif strcmp(Method,'nearest'), % Nearest neighbor interpolation r=interp2(A,xx,yy,'nearest');%r=interp2(A,xx,yy,'nearest');elseif strcmp(Method,'bilinear'), % Linear interpolationsize(A)r=interp2(A,xx,yy,'linear');%r=interp2(A,xx,yy,'linear');elseif strcmp(Method,'bicubic'), % Cubic interpolationr=interp2(A,xx,yy,'cubic');%r=interp2(A,xx,yy,'cubic');elseerror(['Unknown interpolation method: ',method]);end% any pixels outside warp, pad with blackmask= (xx>Ac) | (xx<1) | (yy>Ar) | (yy<1);r(mask)=NaN;end。