Zigbee定位测量
ZigBee无线室内定位

一、ZigBee 无线通信技术ZigBee 技术是一种近距离、低复杂度、低功耗、低速率、低成本的双向无线通讯技术。
其电池功耗为半年到一年,数据传输速率为250kbps ,反应时间为30ms ,作用范围可达50-100m ,具有可扩展性。
从系统的低成本、低复杂性、实时性、可扩展性出发,ZigBee 无线技术适用于室内定位系统中,且较为理想,满足实际需要。
IEEE 802.15.4标准为LR-WPAN 网络制定了物理层(PHY)和介质访问控制(MAC)子层低功耗扩频无线电技术协议。
主要特点如下:(1)有多个物理层载波频段提供不同的数据传输速率。
2.4GHz 频段提供250kbit/s 的传输速率;而915MHz 频段(北美),速率为40kbit/s ; 868MHz 频段(欧洲),为20kbit/s 。
(2)支持星型、簇树和点对点网络拓扑结构。
(3)有16位短地址和可选64位扩展地址两种地址格式。
(4)支持冲突避免的载波多路侦听技术(carrier sense multiple access withcollision avoidance, CSMA-CA);(5)支持确认(ACK)机制,保证传输可靠性。
二、基于RSSI 的ZigBee 无线网络室内定位方法RSSI 定义为由接收器接收到的信号强度指示。
通常,RSSI 等价于被测量的功率,即信号强度的平方。
RSSI 可以认为是超声波、RF 或其他信号。
RSSI 测量在硬件上是相当便宜和简单的,因为几乎所有的无线通信设备都具有测量RSS的功能。
基于诸如RSSI 等RF 特征的位置指纹是用来标识位置的一个基本信息。
通常我们将一个位置和该位置处的唯一的RF 特征值作为一个整体用来描述建筑物内的某一个位置。
例如我们可以使用元组来标识一个位置,其中L 反映该位置的坐标或这类似信息,F 反映该位置的RF 特征值信息。
例如L 就用元组 。
因为同一个位置如果目标的方位不同所测量到的RF 信息也会有所变化,所以如果还要反映移动目标的方向信息,那么可以用元组 来标识一个目标节点的位置信息。
ZigBee无线定位技术原理(转载自e络盟社区)
ZigBee无线定位技术原理(转载自e络盟社区)德州仪器(TI)ZigBee无线射频元件CC2431所含的定位引擎(LocationEngine)就像是室内全球卫星定位系统(GPS),利用ZigBee网络的无线射频基础设施计算物品或人员的位置。
相较于GPS 系统,把定位引擎和微控制器(MCU)全部整合至单晶片射频收发器,不仅耗电量远少于GPS硬体,成本更不到其十分之一,且无论在室内或室外,只要有ZigBee网络的地方就能使用。
常见应用包括从屋内不同房间移动时,遥控开灯或关灯;装运码头的货柜追踪,以及从网站追踪特定设备。
定位引擎还能简化无线网络设定,能在新设备加入网路时找出其所在位置。
多数无线传感器网络都需一套方法判断网络节点的位置,所以使用者必须在安装时决定应该互相交换的资料,以及应与中央资料搜集点互传资料的节点。
市场上许多解决方案透过软体计算网络节点位置,这类系统的节点读取位置计算所需的参数,然后把资讯送到中央资料搜集点,算出位置后再传回给节点,这个过程的运算量很庞大,须用到个人电脑或高效能微控制器。
这种计算位置的方式仅对小型网络和少数节点有用,因为执行计算所需的网络流量会随着节点数目的指数增加。
高流量负载和频宽不足让这套方法只能用于电池供电的网络,可利用分布式定位计算解决这个问题,可先让网络节点找出多个已知位置且距离最近的参考节点,然后根据参考节点传来的资讯计算本身的位置,因此,网络流量将只出现在待测节点(BlindNode)连接范围内的节点。
另外,由于网络流量只会随待测节点的数目等比例增加,所以同一个网络可有很多个待测节点。
本文介绍的结果是以ZigBee网络测量值为基础,但也适用于较简单的IEEE802.15.4网路。
定位引擎会根据无线网络里,相邻无线装置传来的接收讯号强度指标(RSSI)计算自己的位置。
随着环境不同,两台无线装置之间的RSSI讯号会有很大差异,举例来说,若有人在两台无线装置的中间走过,接收讯号就可能减少30dBm,为弥补这么大的差异,定位引擎最多会根据十六台无线装置传来的RSSI值进行计算,以便得到精确的位置,这种做法的逻辑是利用多个节点求取平均值,即可将RSSI的变异量消除。
基于Zigbee的井下人员定位监测系统的设计与研究
n t r n r n o t e c s fmis d W ie e s l c t n s se o i e i d sg e h s p p r e wo k a d p o e t h a e o s e . r ls o ai y t m fm n s e i n d i t i a e o n b s d n i b e t c n l g n mp o e t e l c t n l o i m o h o a in y tm ,a d a e o Z g e e h o o y a d i r v s h o a i ag rt o h f r t e l c t s se o n
研 究 与 开 发
基 于 Zg e ib e的井下 人 员定位 监测 系统 的设计 与研 究
王 同泉 崔建 明
002 3 0 4) ( 原理工 大学 电气与 动力工 程学 院,太原 太
摘要 针 对 目前 井下人 员定位 系统功 能单 一 ,组 网能力 较弱 并且容 易 出现漏检 的情况 ,设 计 了一种基 于 Zg e ibe技术 的人 员定位 监测 系统 ,并对 适合 Zg e ibe技术 定位 系统 的 R S 测 距算 SI 法进 行 了差分 修 正 ,提 高 了定 位 系统 的准确 度 , 同时设 计 了系统 的网 关和定位 流程 ,使 整个 系 统 能更好地 满足 井下人 员定位 的需求 。通 过上位机 zL c o 的实验 测试 ,得 到 了较 为理想 的 —o ̄in
i p o e hea c r c . e n h l h sp p rd sg st eG a e a nd Lo ai n fo c r o m e tt e m r v st c u a y M a w iet i a e e i n h t w y a c to w ha t e h l t l c to n r r u d pe s n ls t m e 1 o a i n u de g o n r o a yse w l.The t s e s m o e s ts a t r e u t hr u h t e PC e t g t r a if c o y r s ls t o g h
基于ZigBee的定位及体征监测系统的设计与实现
基于ZigBee的定位及体征监测系统的设计与实现佚名【摘要】针对当前幼儿园儿童等特殊人群自我保护能力差,管理人员监管不及时的特点,以及目前市场上定位工具造价高的问题,基于RSSI(Received Signal strength Indicator)测距技术和ZigBee技术,设计开发了一套低成本的定位及体征监测系统.该系统的整体设计是基于CC2530高性能处理器以及LEA-6S这款GPS芯片,同时在PCB(Printed Circuit Board)集成了红外线温度传感器.采用ZigBee协议建立网络,以GPS与RSSI联合定位的形式对目标节点进行定位,通过服务器对配带定位装置的人群进行信息采集,最终通过Web端或手机移动端来查看信息.【期刊名称】《电子设计工程》【年(卷),期】2019(027)002【总页数】5页(P52-55,61)【关键词】ZigBee;体征监测;红外线传感器;GPS【正文语种】中文【中图分类】TN929.5时刻获取特殊人群的各项信息来加强对其的监控对社会的稳定具有重要意义,能否精确获取其位置信息与体征信息是该内容的重要部分。
以幼儿园儿童为例,目前市面上一般的儿童定位工具,基本上每个节点配上一个GPS芯片,造价昂贵,且GPS信号易被建筑物、浓密树林、金属遮盖物等吸收,利用GPS定位只适合在户外使用,而在室内场合,由于信道环境复杂,微波信号衰减厉害,测量误差较大[1]。
针对幼儿园区域内环境相对复杂的情况下,仅用GPS定位显然不能满足精确度要求。
随着科学技术的发展,无线传感网技术已应用于人类生产生活的各个方面[2~5]。
本文所论述的无线传感器网络是一种基于ZigBee技术的高可靠性、高安全性、低功率、低成本的无线网络技术[6]。
利用其中的RSSI定位技术设计的定位系统在特定的环境内具有精确度较高,功耗小,造价低等优点,在GPS定位的配合下,能够完成类似幼儿园这种环境复杂度较高的区域内对定位节点的区域定位[7]。
《基于ZigBee的漏水定位监测系统》范文

《基于ZigBee的漏水定位监测系统》篇一一、引言随着科技的不断进步,智能化的家居系统、工业监测等逐渐融入我们的日常生活。
在众多的应用场景中,基于ZigBee的漏水定位监测系统因其高效率、低功耗及广泛的覆盖范围,受到了广泛的关注和应用。
本文将详细介绍基于ZigBee的漏水定位监测系统的原理、设计、实现及应用。
二、ZigBee技术概述ZigBee是一种基于IEEE 802.15.4标准的低速无线个人区域网络通信协议,具有低功耗、低成本、低复杂度等特点。
它广泛应用于智能家居、工业自动化、环境监测等领域。
在漏水定位监测系统中,ZigBee技术以其独特的优势,如稳定的数据传输和广覆盖的无线网络,成为了一个理想的通信方式。
三、系统设计1. 硬件设计本系统主要由多个ZigBee无线传感器节点和中央监控单元组成。
每个传感器节点负责检测特定区域的漏水情况,并将数据通过ZigBee网络发送到中央监控单元。
中央监控单元负责接收并处理来自各个传感器节点的数据,通过上位机软件显示出来,实现对漏水事件的实时监测和报警。
2. 软件设计系统软件主要包括ZigBee无线通信协议栈和上位机监控软件两部分。
ZigBee无线通信协议栈负责实现无线传感器节点之间的数据传输,上位机监控软件则负责接收并处理来自中央监控单元的数据,实现实时监测和报警功能。
四、系统实现1. 传感器节点部署根据实际需求,将传感器节点部署在需要监测的区域。
每个传感器节点应定期进行维护和更换电池等操作,以确保系统的正常运行。
2. 数据传输与处理当传感器节点检测到漏水事件时,会通过ZigBee网络将数据发送到中央监控单元。
中央监控单元接收到数据后,通过上位机软件进行数据处理和显示,实现对漏水事件的实时监测和报警。
五、系统应用基于ZigBee的漏水定位监测系统具有广泛的应用场景,如家庭水管监测、工业管道泄漏监测等。
该系统能够实现实时监测和定位漏水事件,为预防潜在的安全隐患提供有效手段。
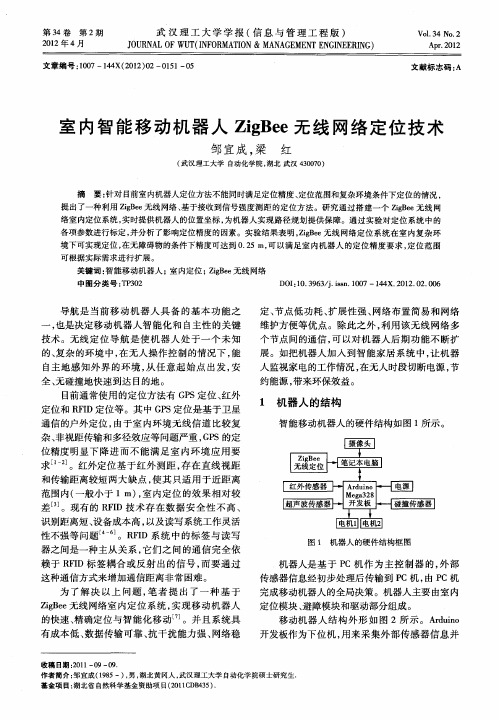
室内智能移动机器人ZigBee无线网络定位技术
由式 ( ) 1 可得到 小 车 与 4个参 考 节 点之 间 的 距 离 Z, , , 。实 际上 只需 要 获得 标 签 与 其 中 。f f f 。 ,
无线龙通讯科技有 限公 司提供 的基 于 Zg e i e的 B C 1 F—C 2 3 一Z K无线 网络 系 统 , 无线 定 5R C4 1 D 其
室 内定位 原 理 图如 图 4所示 , 位节 点 在 接 定 收 到参 考节点 发 出信号 的同时得 到 R S 值 , 多 SI 取 次 接 收到 的 R S 值 的平 均值 作 为 该 时 刻小 车 的 SI 位 置信 息 。
根据接收到信号的强度 , 利用理论和经验传
定位节点之间 R S 值 的信息包。参考节 点收到 SI
与理 论 值 的误 差 , 别 做 不 同距 离 的测 试 实 分 验 。机器 人 两 个 驱 动 电机 直 线 行 驶 误 差 曲线
第3 卷 第2 4 期 21年 4 02 月
武 汉理工 大学学报 ( 息与管理 工程版 ) 信
J U N LO U (N O M 0 O R A FW T IF R A N&M N G M N N IE RN ) n A A E E TE GN E IG
Vo . 4 N . 13 o 2 Ap . 0 2 r2 1
一
定 、 点低功耗、 节 扩展 性 强 、 网络 布 置 简 易 和 网络 维 护方 便等 优 点 。除此 之外 , 利用 该 无 线 网络 多 个 节点 间的通 信 , 以对 机 器人 后 期 功 能 不 断 扩 可 展 。如 把机 器 人 加入 到智 能 家 居 系 统 中 , 机 器 让 人 监视 家 电 的工 作情 况 , 在无 人 时段切 断 电源 , 节 约 能源 , 带来 环保 效 益 。
基于无线ZigBee技术的区域精确定位

基于无线ZigBee技术的区域精确定位作者:杨柳松潘洪雨卢晓琳韦玉琼张劲松来源:《中国新技术新产品》2016年第20期摘要:人们对于在复杂的室内环境中所关心的目标进行监控和定位的需求与日俱增,如工厂、仓储、地下停车场等,常需要确定相关人员及重要设施在室内的位置信息。
所以制定出一套定位精度高、成本低廉、实现简单且鲁棒性好的无线传感器网络室内定位系统是本文研究的重点。
本文以CC2431无线定位引擎为定位核心,搭建了基于ZigBee技术的区域定位系统。
该定位系统满足低成本、低功耗的要求,可以实现精确的区域定位。
关键词:ZigBee技术;精确定位;无线传感器网络中图分类号:TN925 文献标识码:A当前GPS是比较成熟的室外定位技术。
然而在区域环境下,GPS信号遇到障碍物时信号大大衰减,定位精度急剧下降,且其功耗大。
因此制定出一套成本低廉、定位精度高、实现简单且稳健性好、安全可靠、算法复杂度低的无线传感器网络区域定位系统是本文的研究重点。
ZigBee技术是一种低功耗、低成本、低数据传输率、短距离的无线通信技术,将ZigBee技术应用到无线传感器网络中,能够实现精确地区域定位,若目标脱离该区域则报警提示。
1.系统方案的设计本系统采用的是ZigBee室内定位方法。
ZigBee区域定位系统是一个可视化的无线传感器网络定位系统,此定位系统包括ZigBee技术的无线传感器网络与定位监控部分。
对于定位监控部分,终端PC机是其的重要组成部分。
首先,此PC机上应该装有能够查看实时定位的监控软件,之后,此终端PC机需要使用USB转串口线与该传感器网络的网关部分进行连接,相关用户能够使用这个软件对ZigBee网络进行配置与管理,对于网络节点的数据,也可通过此软件来得到。
如果用户需要相关网络节点的实时位置坐标,可以通过此监控软件形象化的交互界面,方便的得到其坐标。
ZigBee网关节点,参考节点和盲节点等3种类型的节点组成了ZigBee无线传感器网络。
zigbee无线网络中rssi室内射频定位测距误差研究

Vol.20,No.1 Mar . 2 0 2 0
ZigBee 无线网络中 RSSI室内射频定位测距误差研究
吴志森
(泉州经贸职业技术学院,泉州 362000)
摘 要 :利 用 ZigBee 无 线 通 信 网 络 中 的 无 线 信 号 强 度 指 示(RSSI)进 行 室 内 射 频(RF)定 位 。 将 通 信 子 系统作为定位硬件,采用三边测量定位算法获得移动网络节点的位置,定位精度很大程度上取决于 RSSI 值 的 质 量 。 为 了 将 RSSI 值 应 用 于 定 位 子 系 统 ,采 用 补 偿 滤 波 器 进 行 滤 波 ,以 克 服 RSSI 值 波 动 限 制 ,从 而 在移动节点定位方面获得更好效果。
2020 年
(3)、式(4)是 式(1)经 过 换 算 得 来 的 [1]。
RSSIi=A-10nAilg(di)
i= 1 ,2 ,… n
(1)
di= (x1 - x1i)2 + (x2 - x2i)2
nAi=-
RSSIi - A 10 lg(di)
d =10 i
-
RSSIi 10n Ai
A
∂di ∂RSSIi
第 20 卷 第 1 期 2 0 20 年 3月
江 苏 工 程 职 业 技 术 学 院 学 报(综 合 版)
Journal of Jiangsu College of Engineering and Technology
DOI:10.19315/j.issn.2096-0425.2020.01.004
1 射频室内定位算法
考 虑 n 个 固 定 点 或 带 有 笛 卡 尔 坐 标(x1i,x2i)的 信 标 RSSI(i dBm),其 中 i=1,2,…n。 RSSIi 是 针 对 移 动 节 点(如建筑物中的人)通信链路 (i i=1,2,…n)测量的。dBm 是指移动节点测量功率的绝对值。图 1 描绘了 3 个信标示例的三边测量法。每个射频收发器通过全向天线发送和接收信号。因此 ,信号传播与方向无 关。然后,根据式(1)、式(2)、式(3)、式(4)计算移动节点和固定点 (i 信标)之间的距离 di。目前,无线信号 传输中普遍采用 Shadowing 模型,式(1)由射频传播信号空间功率分布引起的衰减推导而来。RSSI 是距离 di 的对数函数线性模型,该函数近似自由空间 RSSI 衰减模型,通过引入 参数考虑了非理想介质特性。式
ZigBee定位解决方案与技术原理
ZigBee定位解决方案什么是ZigbeeZigbee是IEEE802.15.4协议的代名词。
根据这个协议规定的技术是一种短距离、低功耗的无线通信技术。
这一名称来源于蜜蜂的八字舞,由于蜜蜂(bee)是靠飞翔和“嗡嗡”(zig)地抖动翅膀的“舞蹈”来与同伴传递花粉所在方位信息,也就是说蜜蜂依靠这样的方式构成了群体中的通信网络。
其特点是近距离、低复杂度、自组织、低功耗、低数据速率、低成本。
主要适合用于自动控制和远程控制领域,可以嵌入各种设备。
简而言之,ZigBee就是一种便宜的,低功耗的近距离无线组网通讯技术。
Zigbee的起源Zigbee, 在中国被译为"紫蜂",它与蓝牙相类似.是一种新兴的短距离无线技术.用于传感控制应用(sensor and control).此想法在IEEE 802.15工作组中提出,于是成立了TG4工作组,并制定规范IEEE 802.15.4.2002年,zigbee Alliance成立.2004年,zigbee V1.0诞生.它是zigbee的第一个规范.但由于推出仓促,存在一些错误.2006年,推出zigbee 2006,比较完善.2007年底,zigbee PRO推出zigbee的底层技术基于IEEE 802.15.4.物理层和MAC层直接引用了IEEE 802.15.4在蓝牙技术的使用过程中,人们发现蓝牙技术尽管有许多优点,但仍存在许多缺陷。
对工业,家庭自动化控制和工业遥测遥控领域而言,蓝牙技术显得太复杂,功耗大,距离近,组网规模太小等,而工业自动化,对无线数据通信的需求越来越强烈,而且,对于工业现场,这种无线数据传输必须是高可靠的,并能抵抗工业现场的各种电磁干扰。
因此,经过人们长期努力,Zigbee协议在2003年正式问世。
另外,Zigbee使用了在它之前所研究过的面向家庭网络的通信协议Home RF Lite。
长期以来,低价、低传输率、短距离、低功率的无线通讯市场一直存在着。
《基于ZigBee的漏水定位监测系统》范文

《基于ZigBee的漏水定位监测系统》篇一一、引言随着城市化进程的加速,各种基础设施如管道、供水系统等在人们的日常生活中扮演着重要角色。
然而,漏水问题作为这些基础设施常见的问题之一,给人们的生产生活带来了极大的不便,并可能导致严重的资源浪费和环境污染。
因此,一个高效、准确的漏水定位监测系统显得尤为重要。
本文提出了一种基于ZigBee 的漏水定位监测系统,旨在实现对漏水问题的及时发现和精确定位。
二、系统概述本系统以ZigBee无线通信技术为基础,结合传感器网络、数据处理等技术,实现对漏水事件的实时监测和定位。
系统主要由传感器节点、协调器以及上位机监控中心三部分组成。
传感器节点负责实时监测管道压力、流量等数据,一旦发现异常则启动报警并向上位机监控中心发送数据;协调器负责接收传感器节点的数据并进行初步处理,再将数据通过无线方式传输至上位机监控中心;上位机监控中心负责接收、处理并显示数据,实现对漏水事件的及时发现和精确定位。
三、系统工作原理本系统通过在管道上布置传感器节点,实时监测管道的压力、流量等数据。
当传感器检测到异常数据时,如压力突然下降或流量异常增大等,则判断为可能发生漏水事件,并启动报警装置。
同时,传感器节点将异常数据通过ZigBee无线通信技术传输至协调器。
协调器对接收到的数据进行初步处理后,再通过无线方式将数据传输至上位机监控中心。
上位机监控中心对接收到的数据进行进一步处理和分析,实现对漏水事件的及时发现和精确定位。
四、系统优势1. 无线通信:本系统采用ZigBee无线通信技术,具有传输距离远、抗干扰能力强、组网灵活等优点,适用于各种复杂环境。
2. 实时监测:通过布置传感器节点,实现对管道的实时监测,一旦发现异常情况可立即启动报警。
3. 精确定位:上位机监控中心对接收到的数据进行处理和分析,可实现对漏水事件的精确定位,为维修人员提供准确的维修位置。
4. 节能环保:及时发现漏水事件并采取措施进行修复,可有效避免水资源浪费和环境污染。
基于zigbee的人体探测、身份识别和定位的研究
贵 州大 学计 算机科 学与信 息技 术 学 院 唐 利
[ 摘 要] 本文设计 了一种基 于无线传感器网络的人体探 测、 身份识 别和定位 系统一 智能监控 系统 。系统 由传统的红外感应、 微波探 测和 身份识别设备 、 定位 系统共 同组成 , 使用无线龙 2 3 4 1定位模块和 S ~ 0 S 1 1红外线模块搭建 了基于 Zg e iB e协议 的无线传 感器I 网 络 下的人体探 测、 身份识别和定位 系统 的实验环境。通过分析在 同一时间段 内 检测到 的信号来 区分非法入侵与合 法进入 , 并对人 员 进 行 精 确 定 位 。 实验 结果 基 本 验证 了系统 的可 行 性 , 下 一 步 系统 的 研 究 和 开发 打 下 了 坚 实基 础 。 为 [ 关键词 ] 无线传感 器网络 人体探 测 身份识别 定位
1引 言 .
为重 要 的支 撑 技 术 之 一 。
无线传感器网络是 当前在 国际上备受关注的 、知识高度集成的前
沿热点研究领域 。 在军事国防 、 工农业 、 城市管理 、 生物医疗 、 环境监测 、 抢险救灾 、 防恐反恐 、 危险区域远程控制等许多重要领域都有潜在的实 用价值 , 已经引起 了许多 国家学术界和工业界的高度重视 , 被认为是对 2 世纪产生巨大影响力的技术之一 。无线传感器网络就是 由部署在监 1 测 区域内大量的微型传感器节点通过无线通 信形成 的一个多跳的 自组 织 网络系统, 目的是协作地 感知 、 其 采集和处理网络覆盖区域里被 监测 对象的信息 , 并发送给观察 者。 z邸e 技术是一种新 兴的短距 离无线通 信技术 。这个名字来 源于 i e 蜂群使用 的通信方式 , 蜜蜂通过跳 zga 形状的舞蹈来传 达信息 , i g Z 分享 新发现 的食物源 的位置 、 距离和方 向等信息。Z B e i e 技术具有低功耗 、 g 成本低 、 时延短 、 网络容量大 、 可靠 、 安全等特点 。 2基于 z b e的人体探测 、 . ie g 身份识别 和定位 21 体 探 测 .人 传统 的人体探测精度不高 , 有误报漏报现象 。究其原 因, 产生误报 最大的原 因在于现有的探测技术 只能在分辨现场物理量 的变化 ,而并 不具备智能。升级换代也只是提高相应 的灵敏度 , 而并没有提高设备智 能化 的 程 度 。 人 体 探 测 器 (u nbd e c r 安 防 报 警 系 统 的 输 入 部 分 , 用 hma oydt t ) e o是 是 来探测入侵者入侵 时所发生的移动或其它动作的装置。 人体探测器通 常由传感器 Sno 、 es ) r 信号处理器和输出接 口组成 , 简 单 的人体探测器 可以没有信号处理器和输 出接 口。 传感器是一种物理量 的探测 、转换装置。它就像人体探测器的眼 睛、 鼻子 、 耳朵 一样 , 入侵者在实施入侵 时总是 要发出声响 、 动 、 振 阻断 光路 , 对地面或某些物体产生压力 , 破坏原有温度场发出红外光等物理 现象 , 传感器则是利用某些材料对这些 物理 现象的敏感性 而将其感 知 并转换为相应 的电信号和电参量( 电压 、 电流、 电阻 、 电容 等) 。处理器 则 对电信号放 大、 滤波 、 整形后成为有效 的报警信 号。输 出接 口 使人 体探 测器的输 出呈现两种输出状态 ,即警戒状态 为无电位 的常 闭触点 或导 通电阻不大于 10 0 n。报警状态和未加 电时为常闭触点开路或开路 电 阻不小于 1 MQ。 2 . 2身份识别 基 于微功率单 芯片收发 机的多跳 通信 方式 的无线 传感器 网络 技 术, 给身份识别和管理技术注入 了新的强大的活力 。 无线传感器网络较现有远距离 R I FD技术应 用 , 可以提供全新 的解 决 手段 。 () 1无线传感器 网络节点不仅具 有远距离 R I FD的识别 功能 , 而且 具 有 更 大 的 可通 过 无 线 方 式 进 行 调 整 的读 写 识 别 范 围 : 01 到 20 从 .米 0
无源定位(无设备定位)zigbee
态。
ZigBee模块
项目部分:
(1)关于无设备目标定位方法研究 研究无设备目标定位的理论依据。掌握具体实现无设备目标定位的操作方法,学习 计算定位位置的数学方法,了解使用该方法所需要的条件和未知量,确定我们在研究 过程中需要得到的相关数值并进行计算,分析不同外界环境对定位精度的影响。
无源定位(DFPL)技术的研 究
背景:
无线定位现在已经被人们广泛的使用,广域网的定位有GPS卫星定位、蜂窝网定 位等,局域网的定位有Wi-Fi定位、蓝牙定位、ZigBee定位、UWB定位等,这些 都是在我们日常生活中经常碰到的定位方式。而这些定位方式都有一个先决条件, 就是被测人或者物必须是携带定位设备的。如果在一些特定的场景中,例如:地 震灾后的救援现场;突发恐怖事件的人质劫持现场等等,这些地方想要让被测单 位携带定位设备,几乎是不可能做到的事情,所以,无设备目标定位(DSPL) 理论的产生,解决了这一难题。
景提取
3Q
(2)CC2430芯片的外围硬件电路设计 研究CC2430芯片的特性和原理并设计我们所需要用到的外围电路。利用CC2430芯 片进行信号强度值的采集,对其无线收发的能力与结构进行系统化分析。对控制芯片
收发的参数进行分析,掌握各个参数对芯片的作用以及影响。 (3)Z-stack协议栈的软件编程设计
研究Z-stack协议栈的工作机制。利用Z-stack协议栈对CC2430芯片进行软件的编写 与应用程序的实现。分析各个接口参数的使用目的、使用方式和使用条件,编写本次
典型定位方式
…
无设备目标定位
基于ZigBee的无线定位应用研究

基于ZigBee的无线定位应用研究随着物联网和智能家居的快速发展,无线定位技术逐渐成为人们关注的焦点。
其中,基于ZigBee的无线定位应用具有广泛的应用前景和深远的影响。
本文将对基于ZigBee的无线定位应用进行研究和探讨。
基于ZigBee的无线定位应用是指利用ZigBee技术实现的无线定位系统。
ZigBee是一种低功耗、低速率、低成本的无线通信技术,具有自组织、自修复、自配置等特点,适用于大规模的无线传感器网络。
在无线定位应用中,ZigBee可以实现节点之间的通信和数据传输,从而实现对物体位置的准确监测和定位。
基于ZigBee的无线定位应用在室内定位方面具有较大的优势。
室内定位是指在建筑物内部进行定位和导航,对于室内环境的监测和管理具有重要意义。
传统的室内定位技术存在定位误差大、成本高、布设复杂等问题,而基于ZigBee的无线定位应用可以通过部署多个节点实现对室内物体的定位和跟踪,具有定位准确、成本低、部署灵活等优点。
基于ZigBee的无线定位应用在智能家居中也具有广泛的应用前景。
智能家居是指通过各种智能设备和传感器实现对家居环境的自动化控制和管理。
基于ZigBee的无线定位应用可以实现对家居物体的定位和监测,从而实现智能灯光控制、智能安防监测、智能家电控制等功能。
例如,可以通过定位系统实现智能灯光的自动调节,根据人的位置和光照情况自动调整灯光亮度和颜色,提高居住舒适度和能源利用效率。
此外,基于ZigBee的无线定位应用还可以应用于其他领域,如医疗健康、物流仓储、智能交通等。
例如,在医疗健康领域,可以通过定位系统实现对病人的定位和监测,及时发现异常情况并采取措施。
在物流仓储领域,可以通过定位系统实现对货物的跟踪和管理,提高物流效率和准确性。
在智能交通领域,可以通过定位系统实现对车辆的定位和导航,提高交通运输的安全性和效率。
综上所述,基于ZigBee的无线定位应用具有广泛的应用前景和深远的影响。
ZigBee无线定位

ZigBee协议栈体系结构1.由四个层组成:物理层(PHY)、介质接入控制子层(MAC){这两个层由IEEE 802.15.4-2003标准定义}、网络层、应用层{这两个层由ZigBee联盟提供了网络层和应用层框架的设计} 2.MAC层提供两种服务:MAC层数据服务(使MAC层协议数据单元(MPDU)的收发可以通过物理层数据服务)和MAC层管理服务(通过MAC层管理实体(MLEM)服务接入点(SAP)访问高层)MAC层作用:有新信标管理、信道接入机制、保证时隙管理、帧确认、确认帧传输以及接入点接入和分离。
3.ZigBee的网络层主要用于ZigBee网络的组网连接、数据管理以及网路安全等。
4.ZigBee的应用层主要为ZigBee技术的实际应用提供一些应用框架模型,以便于ZigBee的应用开发。
ZigBee物理层1.ZigBee的通信频率主要由物理层来规范,包含频率范围分别为2.4GHz(250Kb/s)和868/915MHz(20Kb/s)。
因此IEEE 802.15.4定义了两种物理层分别为2.4GHz物理层和868/915MHz物理层。
两个物理层都基于直接序列扩频(DSSS)技术。
使用相同的物理层数据包格式,区别在于工作频率、调节技术、扩频码片长和传输速率不同。
2.物理层通过射频固件和射频硬件提供一个从MAC层到物理层无线次难道的接口。
由上图可以看到,在物理层中存在有数据服务接入点和物理层管理实体服务的接入点。
这两个服务接入点可提供如下的服务:通过物理层数据服务接入点(PD-SAP)为物理层数据提供服务;通过物理层管理实体(PLME)服务的接入点(PLME-SAP)为物理管理提供服务。
介质接入控制子层MAC1.IEEE802系列标准把数据链路层分成逻辑链路控制子层(LLC)和介质接入控制子层MAC两个子层。
LLC子层在IEEE 802.6标准中定义,为802标准系列所共用。
而MAC子层协议则依赖于各自的物理层。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
应用笔记AN042 CC2431 定位引擎by Aamodt1 关键字.CC2430 .ZigBee.CC2431 .定位引擎2 简介本文描述了CC2431的定位引擎,CC2431是一个在片ZigBee系统,所以它自然地被用于ZigBee网络的定位工程。
这个手册尽可能地写得通俗并且不描述任何有关协议的特殊概念。
本文的主要目的是提供一些定位技术的基本概念,并且提供一些使用CC2431定位工程的简易开发系统的线索和提示。
本文应被作为CC2431和CC2430数据手册之外的扩展。
3 定位工程在CC2431定位工程中使用的算法基于接收信号强度指示器(RSSI)的数值。
RSSI值随距离增加而减小。
图片1显示了一个简单的定位检测系统,“参考点”是一个被放在已知地点的静态结点。
为简化起见这个结点知道它自己的位置并且能告诉其他节点。
参考节点不需要执行硬件的位置检测,它甚至不需要执行任何计算。
一个“盲节点”是基于CC2431建立的,这个节点向参考节点发出请求并接收参考节电的响应信号,读出接收到的RSSI数值,并送入硬件引擎,然后读出计算后的位置并发送位置信息到一个应用软件。
从参考节点发送到盲节点的数据包的最少数据是参考节点的“X”和“Y”参数。
RSSI值由接收端计算,如“盲节点”。
定位工程的主要特性是定位计算能够被每一个盲节点运行,因此运算被分散了。
这个特性减少了在网络中传输数据的总量,所以只有计算后的位置被传送,而不是用于计算位置的数据。
在自然环境中为了映射每个特殊区域为一个明确的位置,两个空间栅格被使用。
方向将表示为X,Y。
在所有的图片中X定义为横向,Y为纵向。
CC2431定位引擎只能掌握两个维度,但是软件有可能掌握第三维度(例如:表现建筑的天花板)。
坐标点(X,Y)=(0,0)是栅格的左上角。
3.1 节点类型3.1.1 参考节点具有静态位置的节点叫做参考节点,参考节点必须配置反映物理位置的X和Y值。
参考节点的主要任务是提供包含XY坐标的“参考”包给盲节点,也可做为锚定节点被查阅。
由于这个节点一点也不需要使用硬件定位引擎,所以不必使用CC2431作为这样的用途。
这意味着参考节点能在CC2430或CC2431上运行。
因为CC2430/31是基于与CC2420同样的收发器,所以即使是CC2420配合一个适当的MPU就能用于参考节点。
3.1.2 盲节点一个盲节点与离它最近的参考节点通信,收集每个参考节点的X,Y,RSSI,并使用硬件定位引擎计算它自己的位置。
然后计算出的位置被发送到一个控制站。
这个控制站应该是一个PC或系统内的另一个节点。
盲节点必须使用CC2431。
3.2 定位硬件定位引擎利用了一个从软件层面看来极端简单的接口,写入参数,等待计算,读出计算后的位置。
这章将讨论参数的区别和如何被解释的。
3.2.1 输入表1显示输入定位硬件所有的必须输入。
全部数值的详细描述会在本文最后。
下面是一个简短介绍。
3.2.2 输出24接收信号强度指示器(RSSI)当CC2430/31接收一个包后它会自动添加RSSI值到接收包。
RSSI值总是8个符号周期(128us)的平均。
RSSI值被表示成一个单字节值,一个2秒余角值。
当一个包从CC2431的FIFO中读出时,倒数第二个字节将包含RSSI值(在接收真实包的8个符号后测量的)。
即使RSSI值与接收到的数据包同时被捕获,RSSI值也会反映在那时接收信号的强度,不必非得是属于接收数据的信号功率。
这样给了RSSI值出错的机会,当大量的节点正在同样的频道上对话时被捕获的RSSI值。
3CC2430/31 包含一个寄存器称做RSSI。
这个寄存器掌握着与上面所描述的相同值,但是它在包接收时是不锁定的,因此寄存器值不应用于进一步的计算。
只有与接收数据关联并被锁定的RSS值能被解释成精确测量的RSSI值。
4.1偏移RSSI值上面被描述为带符号2秒余角。
数值不能作为接收信号强度被读取和解释。
为了将真实的读出值转换成接收信号强度一个偏移量必须被加入。
在数据表中给出的偏移量近似-45,这个偏移量更多地依赖天线结构。
4.2 线性在TI实验室的测量显示了芯片RSSI的测量值非常完美地匹配信号输入功率。
在CC2430数据表中线性曲线被绘制成输入功率与RSSI值相对应。
4.3 信号传播理论接收信号强度是发射功率和发送接收之间距离的函数。
象下面方程显示的那样接收信号强度随距离增加而减小RSSI= -(10nlog10d+A)。
n:信号传播常量,也叫做传播指数。
d:与发送端距离。
A:在1米距离接收信号强度A和n更广泛的讨论在第5章。
4.4 RSSI 实践思路(4.3)节描述了理论上RSSI值为距离的函数。
本节将讨论RSSI值如何在真实世界被用于测量。
当使用理想的信号强度公式计算的是理想直线方向,但是当使用真实值不确定性必须计入估计值。
最大的不确定性在于硬件,但有些软件也应被加入以增加精度。
本节提供的方法有一个主要目标:获得一个在最大程度上正确反映距离的RSSI值。
4.4.1 过滤RSSI值的简单方法各种不同的滤波器能够用于平滑RSSI值。
两个通用的滤波器是平均和反馈滤波器。
平均是最基本的滤波类型,但是它要求更多的数据包被传送。
反馈滤波器仅使用最近的RSSI值的小部分数据用于每次计算。
这样需求数据少,但增加了计算新位置的延时。
平均RSSI值是简单地接收每一个参考节点一些数据包的RSSI测量值并且根据下面的等式进行计算。
如果要选用一个进似的滤波器,它能被显示成如下的样子。
在这个等式中变量a典型值0。
75或更高。
4.4.2算的RSSI 对比测量的RSSI图片显示从左到右,RSSI理论值,慢变化成份,最后当加入快速变化成份,例如在多径成分混淆下。
最右边的图显示是最接近真实情况。
注意这些图不是显示任何真实的测量,只是被画出用于指明基于RSSI值计算位置所存在的一些问题。
5不同参数之间的混淆在CC2431中实现的定位引擎在位置计算处理时使用了两个不同的参数。
它们被称做“A”和“n”,并且它们都将在随后讨论。
在本节使用的例子来自于真实实验。
实验使用了8个节点,在下面显示。
盲节点被安放在参考节点栅格的中心并且经测量的RSSI值列在下表中。
在本例中,节点0,节点3,节点4和节点7被放置在与盲节点等距离的位置。
节点1,节点2,节点5和节点6也被放置在与盲节点等距离的位置,只是更近了几米。
就象显示,这些没有直接表现在测量值中。
5.1 A-RSSI 距离发送器1米测量值A,是一个经验值,距离发送端1米的RSSI测量值5.1.1 测量A理论上A值应该在所有的方向上相等。
在发送器和接收器上的天线很大程度上不能完全等方向性,因此应该使用平均值。
图9 显示了距离发送1米的RSSI测量值。
图9显示了在图8的P0,P1,P2和P3位置测到的值。
从图9中得出的结论是天线不是等方向性的,所以A应该取平均值。
对于本次实验使用的设备,平均值约为- 46。
这些测量在RSSI_OFFSET = - 45下做出。
5.1.2 A 对被计算的位置下图显示了一个错误的参数A将如何影响盲节点定位计算结果。
图片不是显示哪个A值使用的最正确。
蓝点显示了盲节点用不同的A值计算出的它自己的不同位置,得出在X,Y 上相对地很大差别。
在室内环境中能够给出的最接近正确的典型A值是在45和49之间。
在这个例子中使用A(45-49)计算的位置近似地(22,28),而真实位置是(22,26)。
5.2 N –信号传播系数命名为N的参数是一个描述当收发距离增加时信号强度是怎样减少的。
N高度依赖于自然环境。
例如厚墙影响更大。
这个值只能凭经验来决定。
在CC2431中包含的定位引擎不直接使用N,它使用一个称做n_index来代替。
N和n_index 之间的关系在下面的表中能看到。
这个转换表用来减少硬件调试精度的复杂程度。
从表4中N能够被选择从1.0到8.0图11显示了N的选择在给定距离时是怎样影响RSSI的理论值的,距离单位米。
N应该尽可能地精确匹配自然环境。
5.2.1 测量n为所有的环境发现一个默认的优化n_index不是不可能。
最简单的方法也许是安装所有的参考节点在系统将要使用的环境中,然后用不同的n_index实验找出最适合环境的值。
实验已经显示了一个在15和25之间的值给出好的结果。
5.3 参考节点的数目根据大拇指规则,尽可能多的参考节点应该被使用。
至少3是必要的正确的结果。
如果太少节点被使用,来自于每个节点的混淆会变得更高,并且错误的RSSI值能引起计算出的位置重大改变。
错误的RSSI值在本文意味不能很好地与理论值匹配,例如由于多径或信号被墙或类似的东西阻挡。
如果盲节点被放在参考点栅格之外,结果将与真实位置很可能有很大的差异。
不推荐追踪栅格之外的目标。
6软件算法一些通用的算法在软件中被运用,后面它们在高级别上被描述。
请注意这个应用笔记不描述任何使用到的网络技术。
6.1 “最好”参考节点的选择最近的节点应该被用于计算。
这意思是具有最高RSSI值的8个参考节点应该被使用,而其他的所有节点应该被忽略。
如果达不到8个,那么尽可能多的节点应该被使用。
6.2 覆盖区域的扩展硬件定位引擎能掌握X和Y值达到64米,或更精确地达到63.75米在两个方向上。
对于许多应用这是一个很小的区域。
因而扩展区域是必要的。
这些可通过一个简单的软件预处理算法达到。
每个节点具有2字节的X,Y。
精度0.25米,这样给出16384米的最大范围。
图12 显示了算法是如何工作的例子。
图显示了参考节点被放在X和Y两个方向上每隔30米。
在图上亮绿色节点是盲节点,其他所有节点是参考节点。
.步骤1是定位一个RSSI值最高的节点并计算“移动”这个节点到64X64米正方形中心的偏移。
由于已知RSSI值,这个节点的距离很容易被估计。
在图12中位置必须在白色圈中。
.下一步是定位其他的参考节点以“增强”第一个节点。
在图中标暗蓝色的节点被使用。
所有的节点具有与第一步发现的相同的偏移值。
.所有发现的数值被输入硬件定位引擎,位置结果被读出。
.最后步骤是把计算的位置加上相同的偏移量,在完成这些运算后,盲点在整个栅格中的位置就知道了。
6.3 水平/地板指示硬件定位引擎被设计计算二维位置。
这章给出一些如何在软件上扩展以掌握第三个方向线索和创意,例如建筑物地板。
为了指示水平层,一个坐标必须在X,Y之外被引入。
在后面这个坐标定义为Z。
用一字节足够表达Z,它给出256不同层。
一个假设是放在另一层的节点信号强度比盲节点所在层的节点信号强度低。
这样意味着参考节点的密度会相当高。
不是假设是所有与盲节点同层的参考节点比在其他层的参考节点更强壮。
图13 显示了一个简单的层间位置追踪网络。
三个标着‘A’的节点都有相同的X和Y值,但Z不同。