【电气工程自动化】直流无刷电机-运动控制实验报告
实验二 直流无刷电机实验

实验二直流无刷电机实验一、实验目的1、掌握直流无刷电机的组成、工作原理及特点。
2、初步了解DSP的工作原理。
3、了解DSP控制无刷电机的方法。
4、掌握工作特性的测定方法二、预习要点1、分析掌握直流无刷电机的运行原理。
2、了解直流无刷电机的控制方法。
3、掌握直流无刷电机的工作特性及机械特性三、实验项目1、测量定子绕组的冷态直流电阻2、空载损耗的测定3、工作特性的测定四、实验方法1、实验设备序号型号名称数量1 DD01 电源控制屏1件2 DD02 实验桌1件3 DD03 导轨、测速发电机及转速表1件4 DJ23 校正直流测功机1台5 D31-2 直流数字电压、毫安、安培表1件6 D37-2 数/模交流电压表1件7 D38-2 数/模交流电流表1件8 D34-3 智能型功率、功率因数表1件9 D45 可调电阻器1件10 D51 波形测试及开关板1件11 D93 直流无刷电机控制器。
1件12 HK93 直流无刷电机1件2、屏上挂件排列顺序D37-2、D38-2、D45、D93、D34-3、D31-2、D513、测量定子绕组的电阻。
用数字万用电表Ω档测量电机RUV、RVW、RUW间的阻值,测取三次,取其平均值,测量定子三相绕组的电阻值,记录于表2-1中。
表2-1 室温℃2个电机绕组的阻值RUV(Ω)RVW(Ω)RUW(Ω)123电机绕组1的阻值:电机绕组2的阻值:电机绕组3的阻值:5、空载损耗实验1)检查按图2—3的接线是否正确,图中A、V、W为交流仪表,其中A、V应该选择D37-2和D38-2最上部的模拟仪表量程分别选择0.3A(注意A表的测量短接按键要按下使仪表处于测量状态)和300V(选择数字仪表无法读取数据),量程选择是否正确、W可以使用数字仪表。
2)直流无刷电机直接与测速轴编码器部分连接。
先将输入交流电压调到AC220V。
3)再将调节D93调速电位器调至0,按D93上的起动按钮,D93上的显示窗口显示0000,再调节D93调速电位器,使M起动,使转速达到1500r/min,然后逐次降低电压直至转速为零,待运行稳定后记录U o、I o、P o、n各参数于下表2-4中。
电机与运动控制实验报告格式详细版
文件编号:GD/FS-5212(报告范本系列)电机与运动控制实验报告格式详细版The Short-Term Results Report By Individuals Or Institutions At Regular Or Irregular Times, Including Analysis, Synthesis, Innovation, Etc., Will Eventually Achieve Good Planning For TheFuture.编辑:_________________单位:_________________日期:_________________电机与运动控制实验报告格式详细版提示语:本报告文件适合使用于个人或机构组织在定时或不定时情况下进行的近期成果汇报,表达方式以叙述、说明为主,内容包含分析,综合,新意,重点等,最终实现对未来的良好规划。
文档所展示内容即为所得,可在下载完成后直接进行编辑。
实验名称:电流、转速调速调节器设计一、实验目的1、掌握双闭环直流调速系统的稳态参数计算、系统的稳定性分析2、了解用MATLAB软件工具对系统的电流环和速度环作PI调节器设计3、熟悉对系统进行仿真的步骤和方法二、实验过程1、设计要求(1)静态指标:无静差(2)动态指标:电流超调量小于等于5%;空载启动到额定转速时的转速超调量小于等于10%2、电流环设计(1)确定时间常数:经计算得电流环小时间常数之和为0.0037s (2)选择电流调节器结构:采用PI调节器(3)计算电流调节器参数:电流调节器超前时间常数为0.03s,ACR比例系数为1.013(4)校验近似条件:均满足近似条件(5)计算调节器电阻电容:按照计算得出的电阻电容参数,电流环可以达到的动态跟随性能指标为4.3%,小于5%,满足设计要求3、转速环设计(1)确定时间常数:经计算得转速环小时间常数之和为0.0174s (2)选择转速调节器结构:采用PI调节器(3)计算转速调节器参数:ASR超前时间常数为0.087s,ASCR比例系数为11.7(4)校验近似条件:均满足近似条件工学院实验报告(5)计算调节器电阻电容(6)校核转速超调量:转速环可以达到的动态跟随性能指标为8.31%,小于10%,满足设计要求4、电流闭环控制系统仿真图1电流环仿真模型5、转速环仿真设计图2 转速环仿真模型6、不同PI参数下仿真图对比表1中序号1为以KT=0.25的关系式按典型I 系统设计得到PI调节器的阶跃仿真结果图,可以看出此时无超调、但上升时间长;序号2为以KT=0.5的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时超调量小、上升时间较短,兼顾了稳定性和快速性;序号3为以KT=1的关系式按典型I系统设计得到PI调节器的阶跃仿真结果图,可以看出此时上升时间短、但超调大;序号4为开环时仿真结果图,可以看出系统将不会达到稳态。
直流无刷电机实验

直流无刷电机实验一.实验目的1.了解直流无刷电机的运行原理2.掌握直流无刷电机的DSP控制。
二.实验内容1.实现无刷直流电机的正反转控制2.实现无刷的速度调节3.实现无刷直流电机电流环和速度环双环闭环控制三.原理简介1.直流无刷电机的原理无刷直流电动机的结构原理图如图2-1所示:图1 直流无刷电动机的结构原理图无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中相应的功率开关器件联接,在图1中A相、B相、C相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联接[2]。
定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。
其原理框图如图2所示。
图2 直流无刷电动机的原理框图2. 直流无刷电机的控制直流无刷电机的控制基本上类似于直流有刷电机的控制(PWM 调制),但由于无刷直流电机用电子换向器取代了机械电刷,所以无刷直流电机除了在控制各相电枢电流的同时还用对电子换向器进行控制。
在无刷直流电机的运行过程中,霍尔位置传感器不断检测电机当前位置,控制器根据当前位置信息来判断下一个电子换向器的导通时序。
如图3所示H1H3ANCBNCBNA CNAH2CNBANB AZXCyWBuV旋转方向反向图1 电子换向器的工作原理图中H1、H2和H3分别表示霍尔位置传感器的信号,H1的有效期为X 轴到u 轴的正半周,H2的有效器为V轴到y轴的正半周,H3的有效期为W轴到z轴的正半周,有效是霍尔对应的信号为1。
直流无刷电机实验
电气工程及其自动化专业实验实验名称:直流无刷电机实验实验报告书科目:特种电机及其控制专业:电气工程及其自动化班级:05111001学号:0511100110姓名:陈祥杰重庆邮电大学移通学院2013年6月直流无刷电机实验一.实验目的1.了解直流无刷电机的运行原理2.掌握直流无刷电机的DSP控制。
二.实验内容1.实现无刷直流电机的正反转控制2.实现无刷的速度调节3.实现无刷直流电机电流环和速度环双环闭环控制三.原理简介1.直流无刷电机的原理无刷直流电动机的结构原理图如图2-1所示:图1 直流无刷电动机的结构原理图无刷直流电动机主要由电动机本体、位置传感器和电子开关电路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图1中的电动机本体为三相两极,三相定子绕组分别与电子开关线路中相应的功率开关器件联接,在图1中A相、B相、C 相绕组分别与功率开关管V1、V2、V3相接。
位置传感器的跟踪转子与电动机转轴相联接[2]。
定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。
由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。
所以,所谓直流无刷电动机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电动机以及位量传感器三者组成的“电动机系统”。
其原理框图如图2所示。
图2 直流无刷电动机的原理框图2. 直流无刷电机的控制直流无刷电机的控制基本上类似于直流有刷电机的控制(PWM 调制),但由于无刷直流电机用电子换向器取代了机械电刷,所以无刷直流电机除了在控制各相电枢电流的同时还用对电子换向器进行控制。
【电气工程自动化】直流无刷电机-运动控制实验报告
《运动控制系统综合实验》实验报告小组成员:直流无刷电机实验报告一、实验目的通过对8257的编程控制,发出可以驱动直流无刷电机的六路PWM 波,实现对电机的控制。
二、实验原理1.直流无刷电机驱动原理这部分在PPT里有详细介绍,简单来说就是要根据转子上的三个霍尔传感器的状态发出下一步所需的三相电流。
刚开始时我对这部分原理迟迟不能搞透彻,对着向量图思考了好久,就是不能把霍尔传感器的状态和所需电流方向对应起来。
主要问题是那个PPT上的向量图没有清楚的思考步骤,导致我把定子的磁场一直当成转子的看,当然搞不清楚。
后来在和身边同学交流后才明白。
然后我按照六步驱动法得到了逆时针转动所需的霍尔状态表,如图1左,经验证此状态表是可以成功驱动电机的。
搞定逆时针转动后我趁热打铁,把顺时针转动的霍尔状态表也写了出来。
但是最开始我想当然的以为把逆时针的状态倒过来对应霍尔传感器的值电机就会反转,经过试验后证明这种思路是错误的,电机还是逆时针转动。
我想了好久没想明白,只好又从头推了一遍顺时针转动所需的状态表,如图一右。
前后对比我们发现相同霍尔状态时,正反所需的电流恰好相反,也即相差180°。
再回想推导过程中实际是用下一个状态的电流对应本状态的霍尔值,我一下豁然开朗。
我判断电机在某一位置时允许有60°的误差,逆时针转动时上一个状态加上60°,顺时针转动时则减去60°,所以顺时针逆时针转动正好差了180°。
霍尔传感器的状态和所需电流如下表:2.相序确定上述表格中A,B,C其实是我们假定的,与霍尔元件HaHbHc 对应的ABC并不对应,所以我们还要确定一下三相相序。
考虑到我们只给三相电机提供A正B负的电流时,电机转子应该停在一个确定的位置,而这个位置对应的霍尔状态值为010。
那么当我们任意通入一正一负的电流时,若霍尔状态值为010,此时正电流即A相,负电流即B相。
按此方法即可确定相序,所用的A正B负程序如下:写在main里面是为了一直发出A正B负的电流。
无刷电机运动控制实习报告

运动控制系统实习题目: 无刷电机开环控制姓名:学院: 工学院专业: 农业电气化与自动化班级:学号:指导教师: 职称:2015年6月25 日目录摘要 (1)一、设计任务和要求: (1)二、硬件说明 (1)2.1控制板 (1)2.2功率板 (2)2.3按键及显示 (5)三、软件设计 (6)3.1CCS开发软件 (6)3.2程序流程图 (6)3.3各个子模块 (7)四、主程序设计 (13)五、程序调试与烧写 (14)六、实习总结 (15)摘要:本控制系统是以TMS320F2812型DSP为核心控制器的伺服电机矢量控制系统,主要介绍了控制系统的工作原理和控制方法,硬件部分主要由功率板、控制板和显示板构成,软件部分采用矢量控制算法及空间矢量脉宽调制(SVPWM)予以实现,系统采用速度闭环结构,实现了高精度调速。
一、设计任务和要求1、CCS5 开发环境学习;2、硬件整体结构;3、软件整体结构设计;4、程序烧写与整机测试二、硬件说明2.1控制板控制板硬件如图2-1-1所示:图2-1-1 控制板硬件1、电源接口④外供+5V输入,+3.3V输出。
该接口为双排针,“+5V”标识对的一排都为+5V 输入,“GND”和“+3.3V”同理。
在控制板通电后+5V和+3.3V指示灯会点亮。
注:在连接了功率板后,功率板会给驱动板供电,请不要在④电源接口处输入+5V。
2、通信接口②③②:标准RS-232接口,引脚说明:2-TX,3-RX,5-GND。
③:CAN总线接口,引脚说明:1-CANH,2-CANL。
3、GPIO接口①对应的功能如排针旁标识所示。
4、显示板接口⑨显示板直接用串口控制,免去以前用DSP查询键盘和控制显示的麻烦,节省了CPU时间。
键盘显示板的串口波特率是9600bps,无校验位,数据位8,停止位1。
引脚说明:1-+5V,3-GND,5-TXB,7-RXB,8、10-连接显示板点亮指示灯,2、4、6、9-NC5、编码器接口⑧此编码器接口用于输入差分增量式编码器,此差分信号经过26ls32转换成电压信号给DSP , 在板子上还留出了此信号的引脚便于测试。
电机与运动控制系统_实验报告2
电机与运动控制系统_实验报告2实验报告课程名称:《电机与运动控制系统》实验第3次实验实验名称:直流他励电动机在各种运行状态下的机械特性实验时间:2015年xx月xx日实验地点:xxxxxxxxxx组号__________学号:xxxxxxxxxx姓名:xxxxx指导老师:xxxxxx评定成绩:___________实验三直流他励电动机在各种运行状态下的机械特性一、实验目的了解直流他励电动机的各种运转状态时的机械特性。
二、预习要点1.改变直流电动机机械特性有哪些方法。
2.直流电动机回馈制动及反接制动时,能量传递关系、电势平衡方程式以及机械特性。
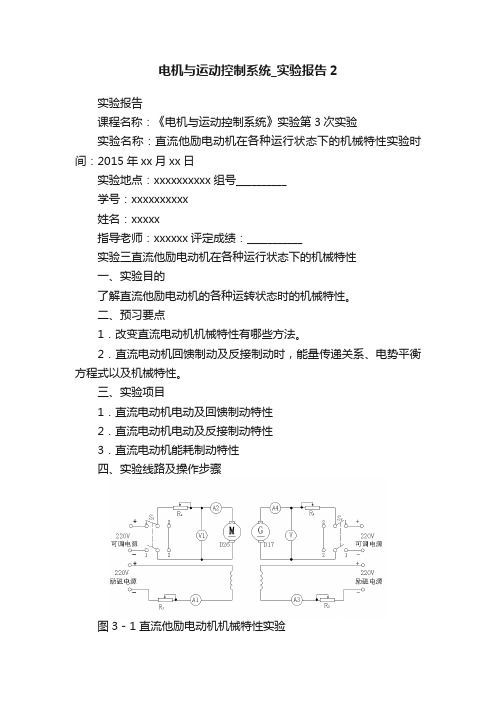
三、实验项目1.直流电动机电动及回馈制动特性2.直流电动机电动及反接制动特性3.直流电动机能耗制动特性四、实验线路及操作步骤图3-1 直流他励电动机机械特性实验实验线路如图3-1所示。
图中被试直流他励电动机选用D26。
其额定点为U N=220V、I N=0.55A、n N=1500r/min、P N=80W;励磁电流I f<0.13A。
1.电动及回馈制动特性实验线路按图3-1接线。
实验设备有:直流电动机(D26),直流负载机(D17),电机导轨,220V直流电源,220V 励磁电源,直流电压电流表,900Ω/0.41A可变电阻箱,90Ω/1.3A可变电阻箱,双刀开关,磁场调节电阻(0~3000Ω)。
量程选择为:直流电压表V1、V2量程选为250V,直流电流表量程选为:A1为0.2A,A2为2.5A,A3为0.2A,A4为2.5A,R1选用900Ω可变电阻,R2选用两个90Ω电阻串联,R3选用磁场调节电阻(0~3000Ω),R4取阻值2250Ω(2个900Ω(0.41A)并联再与2个900Ω串联)。
若仪表自动切换量程则无需选择。
安装电机时,将被试电动机和负载电机与测功机同轴相联,旋紧固定螺丝先将开关S1合向1-1端,S2合向2-2端,R2、R3及R4置最大值,R1置最小值。
电动机运动控制实习报告
实习报告一、实习目的通过本次电动机运动控制实习,使学生了解和掌握电动机运动控制的基本原理和方法,培养学生运用所学知识解决实际问题的能力。
本次实习主要内容包括电动机的基本原理、电动机的启动与制动、电动机的调速方法以及电动机运动控制系统的应用。
二、实习内容1. 电动机的基本原理电动机是将电能转化为机械能的装置,其基本原理是电磁感应。
根据电动机的工作原理和构造,可分为直流电动机和交流电动机两大类。
直流电动机具有调速方便、控制简单等特点,广泛应用于机床、电梯等设备中;交流电动机具有结构简单、运行稳定等特点,广泛应用于风机、泵类等设备中。
2. 电动机的启动与制动电动机的启动方式有直接启动和间接启动两种。
直接启动又分为星角启动和自耦启动,间接启动有绕线转子启动和电阻启动。
启动过程中,应注意选择合适的启动方法和启动设备,以降低启动电流,减小对电网的冲击。
电动机的制动方式有机械制动和电气制动两种。
机械制动主要有摩擦制动和电磁制动,电气制动主要有反接制动和再生制动。
制动过程中,应注意选择合适的制动方式和制动设备,以确保电动机安全、平稳地停止运行。
3. 电动机的调速方法电动机的调速方法有变频调速、变压调速、串电阻调速和串级调速等。
其中,变频调速是目前应用最广泛、效果最好的调速方法。
通过改变电动机的供电频率,可以实现电动机转速的调节,从而满足不同工况下的运行需求。
4. 电动机运动控制系统的应用电动机运动控制系统广泛应用于自动化生产线、机器人、数控机床等领域。
控制系统主要由控制器、执行器和传感器等组成。
控制器根据预设的程序和反馈信号,对执行器进行控制,实现对电动机运动的精确控制。
三、实习心得通过本次实习,我对电动机运动控制的基本原理和方法有了更深入的了解,掌握了电动机的启动、制动和调速方法,并了解了电动机运动控制系统的应用。
同时,实习过程中,我还学会了如何阅读电气图纸,如何进行电气接线和调试。
实习还使我认识到,理论知识与实际操作相结合的重要性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《运动控制系统综合实验》
实验报告
小组成员:
直流无刷电机实验报告
一、实验目的
通过对8257的编程控制,发出可以驱动直流无刷电机的六路PWM 波,实现对电机的控制。
二、实验原理
1.直流无刷电机驱动原理
这部分在PPT里有详细介绍,简单来说就是要根据转子上的三个霍尔传感器的状态发出下一步所需的三相电流。
刚开始时我
对这部分原理迟迟不能搞透彻,对着向量图思考了好久,就是不
能把霍尔传感器的状态和所需电流方向对应起来。
主要问题是那
个PPT上的向量图没有清楚的思考步骤,导致我把定子的磁场一
直当成转子的看,当然搞不清楚。
后来在和身边同学交流后才明
白。
然后我按照六步驱动法得到了逆时针转动所需的霍尔状态表,
如图1左,经验证此状态表是可以成功驱动电机的。
搞定逆时针转动后我趁热打铁,把顺时针转动的霍尔状态表也写了出来。
但是最开始我想当然的以为把逆时针的状态倒过来
对应霍尔传感器的值电机就会反转,经过试验后证明这种思路是
错误的,电机还是逆时针转动。
我想了好久没想明白,只好又从
头推了一遍顺时针转动所需的状态表,如图一右。
前后对比我们
发现相同霍尔状态时,正反所需的电流恰好相反,也即相差180°。
再回想推导过程中实际是用下一个状态的电流对应本状态的霍尔
值,我一下豁然开朗。
我判断电机在某一位置时允许有60°的误差,逆时针转动时上一个状态加上60°,顺时针转动时则减去60°,所以顺时针逆时针转动正好差了180°。
霍尔传感器的状态和所需电流如下表:
逆时针转动顺时针转动HaHbHc A B C A B C
001 - 0 + + 0 -
101 0 - + 0 + -
100 + - 0 - + 0
110 + 0 - - 0 +
010 0 + - 0 - +
011 - + 0 + - 0 2.相序确定
上述表格中A,B,C其实是我们假定的,与霍尔元件HaHbHc 对应的ABC并不对应,所以我们还要确定一下三相相序。
考虑到我们只给三相电机提供A正B负的电流时,电机转子应该停在一个确定的位置,而这个位置对应的霍尔状态值为010。
那么当我们任意通入一正一负的电流时,若霍尔状态值为010,此时正电流即A相,负电流即B相。
按此方法即可确定相
序,所用的A正B负程序如下:
写在main里面是为了一直发出A正B负的电流。
3.8257的编程原理
一直以来涉及到程序的地方都让我很头痛,不过这次还好,codewarrior采用C语言,还是可以熟练应用的。
概括说来,
我们所编写的程序应能按照上述表格发射正确的PWM波,为
此需添加PWM模块,并应用里面的Submodule子模块。
每个
模块可以产生两路PWM,所以我们需要三个子模块。
通过对
module里的value赋值可以控制该路波的发出与占空比,从而
发出所有的PWM。
三、实验中遇到的问题与解决
显然在实验过程中大家都碰到了许多问题,困扰我们的问题比较
多,其中比较大比较重要的有以下几个:
1.PWM模块的配置
虽然关于PWM模块的设置助教老师讲过一遍,但怎奈需要配置的参数太多,前几周我都没能把PWM波完整的发出去,
更别提受控制的波形。
好在通过查找相关资料我终于搞明白如
何调整占空比,如下所示:
通过给VAL2、VAL3赋值即可控制PWM23开通的时间。
这是
一个Sub里的一个频道A,对频道B和其他Sub方法是一样的。
这样我们终于可以发出6路PWM,但此时这些PWM还不受控制,是一起输出的,下一个问题是怎么控制PWM的输出。
2.PWM输出的控制
开始时我想反正占空比是可以固定不变的,那就控制频道的输出与否就可以控制PWM的输出了。
刚好我在PWM自带的函数库里看到了控制某路输出enable/diaable的函数,如下:
因此就采取这种方法进行编程。
但是不知为何,采用enable/disable的方法编写的程序就是不能正确工作,而且逻
辑上程序也没有错误,在多次讨论找不到错误后我就向身边的同学请教,又学会了另一种方法,即通过对三个模块的VAL2、VAL3、VAL4、VAL5的不断赋值来控制,相关函数如下:
采用这种方式要注意每次对某个模块复制后要加上一行LDOK,即将寄存器里的值赋给VAL,否则VAL的值不会改变。
采用这种方式还有一个好处就是可以改变占空比,而且非常简
单。
3.电机连线
经过好久的调试后PWM波终于可以按规定变化,接上电机后电机也可以转起来,但我们发现转不一会儿电机就发出大量热,手摸上去都受不了。
而且电机转的不太均匀,有不太强的震动。
开始时以为是电机的问题,但换了一个后还是发热,后来经询问
老师后我们想到虽然电机能转,但可能电机的频率和PWM的变化频率并不一样,电机可能没有跟上PWM的变化频率。
正常运行时电机的ABC三相应该正好与PWM的三相对应,但如果A相接正确而BC相接反时电机也会转,只不过效率不高而且转的不稳。
经过确定相序后发热的问题也随之消失。
四、实验感想(???)
这次实验主要是靠自己动手,从刚开始时什么也不会到最后成功驱动电机,中间我们付出了很多时间和精力,但也学到了很
多。
按常老师的话说这次课程主要是锻炼我们自主学习知识的能
力,特别是查找资料的能力。
虽然刚开始几周助教老师讲解时我
没听太懂,但助教老师把相关资料都放在电脑里了,想看随时都
可以看。
通过几周的研究特别是查找codewarrior里的帮助,我既搞懂了原理,也明白了应该怎么实现。
有时实在想不通某个问题
我还会和身边的同学讨论讨论,大家交流一下互相的想法基本都
能解决问题。
通过这次课程我觉得我基本已经可以花费一些时间来掌握一
门自己从没接触过的技能,学习的能力得到了很大的提高。
常老
师对待科研的态度也给我留下了深刻印象,对待科研一定要认真,一点马虎都要不得。
对我们的课程我们也有一些小小的反馈,希
望老师能看一下:
首先电源转换器看上去就很危险,220V的火线都露在表面,说不好就有漏电的危险。
另外实验的驱动电路经常电到我们,漏电比较严重。
不过想要更换实验设备关系到许多问题,所以我
们也只好抱怨一下。
另外希望常老师能把每个阶段的任务都给我们明确一下,不
然好多次在实验室大家都不知道该干嘛,就坐在那儿等助教来讲。
遮掩效率比较低下,也不便于有些能力强的同学自主完成任务。
步进电机实验报告
一、步进电机驱动原理
与直流无刷电机相比,步进电机结构比较简单,驱动原理也相对
简单。
其内部接线图如下:
本次实验用的是四步步进电机,共四根接线,两两一组控制2只线圈。
为了让电机顺利转起来,比如逆时针转动,我们需要先给
线圈AC通正电,再给线圈BD通正电,再给AC通负电,再给BD 通负电。
一个周期共四个状态,所以称为四步步进电机。
由于实
验所用板子输出的是三相电,所以在接线时须将BC或AD接在同一相,用相间电压Uab,Ubc做AC、BD电压。
二、PWM控制
通过上面的分析知道要驱动步进电机只需要按顺序发出四个状态
的PWM波即可。
不过由于没有反馈检测,我们无法确认应该在
何时切换PWM,进入下一个状态。
考虑到电机的转子旋转90°(这时需切换状态)需要一定时间,我们可以在每个状态之间加
上延时,根据延时的多少来控制电机的转速。
程序实现如下:
其中a可以改变,以调节转速。
a越小延迟越小,每个状态间切换的时间越短,电机的转速越快。
不过由于转子转速有上限,所以a不能太小,否则转子转速会跟不上PWM状态的变化,从而出现震动等问题。
有了上面的程序要实现反转就非常简单了,只需AB通完正后通DB,再通BA,再通BD即可
课程建议(???)
1)在课程安排上,在学期初就明确地把课程目标和课程任务告诉我们,让我们清楚的知道这门课我们要做什么,这样在理论
学习的时候才可以更好地掌握相关的知识。
2)在讲解理论的同时结合实验,让我们可以边做边学,避免像这学期一样在后面实验的过程中,忘记很多前面所学的基础知识。
可以让我们更扎实,更清楚明白的掌握所学的内容。
3)建议小班教学,这个学期上课的人太多,我们觉得教学效果不是很好,后面的同学在老师进行演示的时候,我们很多时候
无法跟上。
觉得学的很不清楚。
4)希望可以再多配几个助教,由于助教少,很多遇到的无法解决的问题无法得到及时解决,助教经常两个屋子跑,很辛苦。
5)希望能出一本运动控制的实验指导书,这样可以供我们清楚明白的有条理的进行学习。
6)我们上课所用的参考资料很乱,不清晰,很多我们需要用到的东西却没有,希望老师可以把所用资料进行整理,分类,这
样可以供我们参考。
7)希望在以后的课上,如有外面公司的人来讲课,希望可以有老师在场。
公司的人可能不是很了解课程进度,教学目标,可
能效果不是很好。
8)硬件的稳定性有待加强,板子与电脑的连接不好,希望提
高其各方面得性能。