ARM常用概念及基本功能使用说明
ARM简介及编程

ARM简介及编程1.ARM简介(摘录) ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。
技术具有性能高、成本低和能耗省的特点。
适用于多种领域,比如嵌入控制、消费/教育类多媒体、DSP和移动式应用等。
ARM将其技术授权给世界上许多著名的半导体、软件和OEM厂商,每个厂商得到的都是一套独一无二的ARM相关技术及服务。
利用这种合伙关系,ARM很快成为许多全球性RISC标准的缔造者。
目前,总共有30家半导体公司与ARM签订了硬件技术使用许可协议,其中包括Intel、IBM、LG半导体、NEC、SONY、菲利浦和国民半导体这样的大公司。
至于软件系统的合伙人,则包括微软、升阳和MRI等一系列知名公司。
ARM架构是面向低预算市场设计的第一款RISC微处理器。
2.产品介绍ARM提供一系列内核、体系扩展、微处理器和系统芯片方案。
由于所有产品均采用一个通用的软件体系,所以相同的软件可在所有产品中运行(理论上如此)。
典型的产品如下。
①CPU内核--ARM7:小型、快速、低能耗、集成式RISC内核,用于移动通信。
-- ARM7TDMI(Thumb):这是公司授权用户最多的一项产品,将ARM7指令集同Thumb 扩展组合在一起,以减少内存容量和系统成本。
同时,它还利用嵌入式ICE调试技术来简化系统设计,并用一个DSP增强扩展来改进性能。
该产品的典型用途是数字蜂窝电话和硬盘驱动器。
--ARM9TDMI:采用5阶段管道化ARM9内核,同时配备Thumb扩展、调试和Harvard 总线。
在生产工艺相同的情况下,性能可达ARM7TDMI的两倍之多。
常用于连网和顶置盒。
②体系扩展-- Thumb:以16位系统的成本,提供32位RISC性能,特别注意的是它所需的内存容量非常小。
③嵌入式ICE调试由于集成了类似于ICE的CPU内核调试技术,所以原型设计和系统芯片的调试得到了极大的简化。
ARM技术概述ppt

随着5G时代的到来,ARM将继续推出更多适用于5G的处理器和解决方案,为5G 技术的发展提供更强大的计算能力和更高效的能源管理。
06
arm技术的总结与展望
arm技术的成就
广泛应用
ARM技术目前已经广泛应用在 智能手机、平板电脑、电子书 阅读器等移动设备上,几乎垄 断了整个嵌入式系统市场。
加载和存储指令包括单寄存器 加载和存储指令、多寄存器加 载和存储指令以及基址加载和 存储指令等。
加载和存储指令还可以实现堆 栈操作、缓存优化等操作。
04
arm的编程实例
实例一:简单的arm程序
总结词:基础入门
详细描述:本节将介绍如何编写一个简单的ARM程序,包括程序的架构和指令集 的使用。我们还将介绍如何使用开发板进行调试和验证。
《arm技术概述ppt》
xx年xx月xx日
目录
• arm技术简介 • arm的基本架构 • arm的指令集 • arm的编程实例 • arm技术的未来发展 • arm技术的总结与展望
01
arm技术简介
arm是什么
ARM(Advanced RISC Machines)是一家英国-日本合资公司 ,专注于设计开发低功耗、高性能的处理器。
。
ARM指令集包括三类指令:数据操作 指令、程序控制指令和加载存储指令
。
ARM指令集具有高效、灵活、低成本 等特点,广泛应用于嵌入式系统和移
动设备等领域。
数据处理指令
数据处理指令用于对寄存器中 的数据进行操作,包括加法、
减法、乘法和除法等。
数据处理指令还支持饱和运算 、溢出检测、溢出设置等特殊
操作。
低功耗
ARM技术的设计使得其芯片在 低功耗下能够运行,这使得设
ARM资料
1.ARM不是单片机,准确来讲ARM是一种处理器的IP核。
英国ARM公司开发出处理器结构后向其他芯片厂商授权制造,芯片厂商可以根据自己的需要进行结构与功能的调整,因此实际中使用的ARM处理器有很多种类,主要有三星、飞利浦、A TMEL、INTEL制造的几大类,功能与使用上均不相同。
ARM处理器核还可以嵌入其他专用芯片中作为中央处理单元使用,例如飞利浦的MP3解码芯片就是采用ARM7核心的。
ARM系列处理器很少集成片上硬件资源,更接近今天的处理器范畴,基本不被认为是单片机。
2.A VR单片机是A TMEL公司研制开发的一种新型单片机,它与51单片机、PIC单片机相比运行效率高很多、芯片内部的Flsah、EEPROM、SRAM容量较大、全部支持在线编程烧写(ISP、每个IO口都可以以推换驱动的方式输出高、低电平,驱动能力强、内部资源丰富,一般都集成AD、DA模数转换器;PWM;SPI、USART、TWI、I2C通信口;丰富的中断源等。
主要现在使用的型号是A TMEGA8/16。
拥有ARM技术的处理器A VR单片机本人想学下机器人方面的东西。
51估计不够用,PIC不合适。
现在就是A VR和带ARM技术的片子两种处理器中选择。
有哪位大侠能说下自己的观点吗?最好从下面几个方面来说,越详细越好:1、处理图像------视频捕捉2、语音处理------语音识别3、IO口的驱动能力------经常要带些小电动机4、抗干扰能力5、成本-----要买硬件做平台,¥¥¥¥¥提问者:xianrenly - 四级最佳答案视频处理和语音识别都是个运算量很大的任务,所以用A VR是不行的,使用DSP最好,但在这里只有选ARM了,至于扩大驱动能力就很简单,使用ULN2003A或者ULN2803A来扩展驱动能力,这就不用管单片机本身的驱动能力了。
抗干扰能力ARM和A VR都差不多,不用比较,至于成本……那就是ARM高的多了!如果机器人比较简单,使用A VR中比较高端的单片机也可以,比如A Tmega128/2560等即足够了。
arm芯片手册
arm芯片手册1. 介绍ARM芯片1.1 ARM架构的背景和发展历程1.2 ARM芯片的应用领域和优势2. ARM芯片的基本原理2.1 ARM芯片的结构和组成部分2.2 ARM指令集和寄存器2.3 ARM的数据处理机制和运算方式3. ARM体系结构3.1 ARM处理器的工作模式和特点3.2 ARM架构的版本和演变3.3 ARM处理器的性能和能耗特性4. ARM编程模型4.1 ARM汇编语言和指令集概述4.2 ARM指令的格式和使用方法4.3 ARM汇编程序的基本结构和编写规范5. ARM开发工具和环境5.1 ARM开发板和调试工具5.2 ARM开发软件和集成开发环境5.3 ARM嵌入式系统开发流程和工具链6. ARM应用案例6.1 ARM在移动设备中的应用6.2 ARM在嵌入式系统中的应用6.3 ARM在物联网和智能家居中的应用7. ARM芯片的发展趋势7.1 ARM架构的演进和新技术的应用7.2 ARM芯片的性能提升和功能拓展7.3 ARM在人工智能和自动驾驶中的前景8. 总结与展望8.1 ARM芯片的优势和应用前景8.2 ARM开发者的培训和学习资源8.3 ARM生态系统的发展和合作机会ARM芯片手册1. 介绍ARM芯片ARM芯片是由ARM公司设计和授权给合作伙伴生产的一类低功耗、高性能的处理器芯片。
ARM公司的全称是Advanced RISC Machines,它专注于设计先进的精简指令集计算机(RISC)架构,为各种设备提供高效能、低功耗的处理器解决方案。
ARM架构的起源可以追溯到上世纪80年代,当时英国国防公司(Acorn)开发了一个新型的个人计算机,名为BBC Micro。
为了提高BBC Micro的性能,研发人员设计了一个基于精简指令集(RISC)的处理器,这就是后来的ARM架构。
基于ARM架构的处理器性能卓越,功耗低,逐渐被业界认可并广泛应用于各种移动设备、嵌入式系统和物联网设备。
ARM技术概述

32位指令集
01
ARM处理器的指令集是32位的,这意味着每个指令的长度为32位,这有助于提高处理器的运行速度和效率。
ARM处理器的指令集
支持复杂操作
02
ARM处理器的指令集支持各种复杂的操作,包括算术、逻辑、移位、比较等,这使得处理器可以轻松地处理各种计算任务。
适用于多种操作系统
03
ARM处理器的指令集被广泛应用于各种操作系统,如Linux、Windows Mobile等,这使得开发人员可以轻松地使用这些操作系统来开发应用程序。
云计算和数据中心领域
ARM处理器在云计算和数据中心领域的应用也将逐渐增加,随着人工智能和大数据技术的发展,这些领域需要大量的计算能力和数据处理能力,ARM处理器的低功耗和高性能特点将为这些领域带来更高效和更节能的计算解决方案。
ARM处理器的发展趋势及展望
向更高效能方向发展
随着技术的不断发展,ARM处理器将继续向更高效能方向发展,例如采用更先进的制造工艺和更高效的指令集架构,以提高处理器的处理速度和性能。
向更高效的能源管理技术发展
扩展对新兴技术的支持
强化安全性能
ARM处理器的技术发展方向
移动设备领域
ARM处理器因其高效能和低功耗的特点,将继续在移动设备领域占据主导地位,随着5G技术的普及,ARM处理器将为移动设备带来更快的处理速度和更低的功耗。
ARM处理器在未来的应用前景
物联网设备领域
随着物联网技术的发展,ARM处理器将被广泛应用于各种物联网设备中,例如智能家居、智能城市等,ARM处理器的低功耗特性和强大的处理能力将为这些设备带来更长的使用寿命和更好的用户体验。
可扩展性
移动设备
物联网设备
嵌入式系统
ARM快速入门教程
ARM快速入门教程ARM(Advanced RISC Machines)是一种基于精简指令集计算机(RISC)架构的处理器系列,被广泛应用于嵌入式系统、移动设备和消费类电子产品中。
本文将为您提供一个简单的ARM快速入门教程,帮助您了解ARM的基本概念和使用方法。
第一部分:ARM概述(200字)第二部分:ARM架构(300字)ARM架构采用RISC设计思想,通过简化指令集和优化硬件设计来提高性能和效率。
ARM处理器具有三个基本特征:简洁的指令集、统一的寄存器文件和可变长度的指令长度。
ARM指令集包括数据传输指令(如加载和存储指令)、算术指令(如加法和乘法指令)、控制指令(如分支和跳转指令)等。
这些指令被编码为16位或32位二进制代码,以提高指令执行效率。
ARM处理器的寄存器文件使用统一的32位寄存器,这意味着所有的寄存器都可以用于存储数据或表示内存地址。
该设计简化了指令集编码,并提高了程序的灵活性和扩展性。
与其他处理器架构相比,ARM指令的长度是可变的。
ARM处理器支持16位和32位的指令,根据实际需要进行选择。
这种设计也有利于降低功耗和提高代码密度。
第三部分:ARM开发环境(400字)要开始使用ARM进行开发,您需要一个ARM开发板、一台计算机和适当的开发环境。
ARM开发板是一种嵌入式系统,其中包含一块ARM处理器和各种外围设备(如闪存、RAM、串口等)。
您可以使用开发板来加载和运行您的ARM代码,并与外部设备进行交互。
第四部分:ARM编程(300字)ARM编程可以使用汇编语言或高级语言进行。
汇编语言是一种低级编程语言,直接对应于CPU的指令集。
使用汇编语言编程可以更加深入地了解和控制ARM处理器的操作。
高级语言(如C/C++)编程可以提高开发效率和代码可读性。
您可以使用C/C++编程语言编写ARM应用程序,然后通过交叉编译器将其编译成ARM指令。
在ARM编程中,您可以使用各种库函数和驱动程序来访问外部设备(如闪存、串口、显示屏等)。
arm指令and用法
arm指令and用法ARM指令和用法ARM指令是一种用于处理器的机器指令集,它是一种低级的指令集,用于控制和操作计算机的硬件。
ARM指令在嵌入式系统和移动设备中得到广泛应用。
本文将介绍ARM指令的基本结构和一些常用的指令用法。
一、ARM指令的基本结构ARM指令的基本结构由操作码和操作数组成。
操作码用于指定操作的类型,而操作数则包含了执行操作所需的数据。
ARM指令的操作码和操作数的位数可以根据需要进行变化,其中包括了16位的Thumb 指令和32位的ARM指令。
下面将详细介绍ARM指令的用法。
1. 数据传输指令数据传输指令用于在寄存器之间传输数据。
其中,LDR(Load Register)指令用于将内存数据装载到寄存器中,而STR(Store Register)指令则将寄存器中的数据存储到内存中。
数据传输指令的格式如下:```LDR Rd, [Rn, #offset]STR Rd, [Rn, #offset]```其中,Rd表示目标寄存器,Rn表示基址寄存器,offset表示偏移量。
2. 算术运算指令算术运算指令用于执行各种基本的算术运算,包括加法、减法、乘法和除法等。
这些指令用于对寄存器中的数据进行运算,并将结果存储到指定的寄存器中。
以下是一些常用的ARM算术运算指令:```ADD Rd, Rn, RmSUB Rd, Rn, RmMUL Rd, Rn, Rm```其中,Rd表示目标寄存器,Rn和Rm表示源寄存器。
3. 分支指令分支指令用于实现程序的跳转和循环控制。
ARM架构的分支指令非常灵活,可以根据条件条件进行分支,例如等于零、不等于零和溢出等。
以下是一些常用的ARM分支指令:```B labelBEQ labelBLT label```其中,B指令用于无条件跳转,BEQ指令用于等于零时跳转,BLT指令用于小于零时跳转。
二、ARM指令的应用领域ARM指令被广泛应用于各种领域,特别是嵌入式系统和移动设备。
ARM指令全称及功能

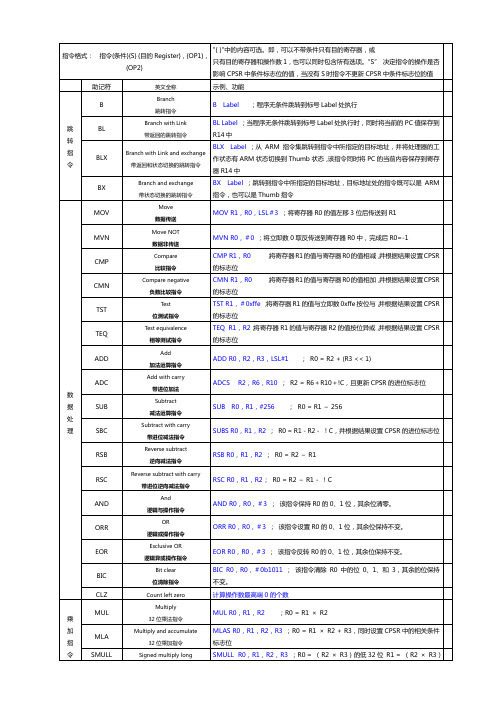
指令格式:指令{条件}{S} {目的Regi ster},{OP1},{OP2} "{ }"中的内容可选。
即,可以不带条件只有目的寄存器,或只有目的寄存器和操作数1,也可以同时包含所有选项。
“S”决定指令的操作是否影响C PSR中条件标志位的值,当没有S时指令不更新C P SR中条件标志位的值助记符英文全称示例、功能跳转指令BBranch跳转指令B Label;程序无条件跳转到标号L a bel处执行BLBranch with Link带返回的跳转指令BL Label;当程序无条件跳转到标号L abel处执行时,同时将当前的P C值保存到R14中BLXBranch with Link and exchan ge带返回和状态切换的跳转指令BLX Label;从ARM指令集跳转到指令中所指定的目标地址,并将处理器的工作状态有A RM状态切换到Th umb状态,该指令同时将PC的当前内容保存到寄存器R14中BXBranch and exchan ge带状态切换的跳转指令BX Label;跳转到指令中所指定的目标地址,目标地址处的指令既可以是ARM指令,也可以是Th umb指令数据处理MOVMove数据传送MOV R1,R0,LSL#3;将寄存器R0的值左移3位后传送到R1MVNMove NOT数据非传送MVN R0,#0 ;将立即数0取反传送到寄存器R0中,完成后R0=-1CMPCompare比较指令CMP R1,R0;将寄存器R1的值与寄存器R0的值相减,并根据结果设置CPSR的标志位CMNCompare negati ve负数比较指令CMN R1,R0 ;将寄存器R1的值与寄存器R0的值相加,并根据结果设置CPSR的标志位TSTTest位测试指令TST R1,#0xffe;将寄存器R1的值与立即数0xff e按位与,并根据结果设置CPSR的标志位TEQTest equivalence相等测试指令TEQ R1,R2;将寄存器R1的值与寄存器R2的值按位异或,并根据结果设置CPSR的标志位ADDAdd加法运算指令ADD R0,R2,R3,LSL#1; R0 = R2 + (R3 << 1)ADCAdd with carry带进位加法ADCS R2,R6,R10; R2 = R6+R10+!C,且更新CPS R的进位标志位SUBSubtract减法运算指令SUB R0,R1,#256; R0 = R1 – 256SBCSubtract with carry带进位减法指令SUBS R0,R1,R2 ; R0 = R1 - R2 - !C,并根据结果设置CPSR的进位标志位RSBReverse subtra ct逆向减法指令RSB R0,R1,R2 ; R0 = R2 – R1RSCReverse subtra ct with carry带进位逆向减法指令RSC R0,R1,R2; R0 = R2 – R1 - !CANDAnd逻辑与操作指令AND R0,R0,#3;该指令保持R0的0、1位,其余位清零。
ARM简介

ARM是什么? ARM为什么存在? ARM有什么优势? ARM体系结构的发展历程? ARM可以应用在哪些方面?
3
一、ARM是什么
ARM——Advanced RISC Machines ARM——高级RISC微处理器 一家公司 一种技术 一类微处理器
4
1.ARM公司
ARM英文全称Advanced RISC Machines, 是英国一家电子公司的名字,该公司成立于 1990年11月,是苹果电脑,Acorn电脑集团 和VLSI Technology的合资企业。
目前,全世界有几十家大的半导体公司都使 用ARM公司的授权,因此既使得 ARM处理器 技术获得更多的第三方工具、制造、软件的 支持,又使整个系统成本降低,使产品更容易进 入市场被消费者所接受,更具有竞争力。
18
ARM是什么? ARM为什么存在? ARM有什么优势? ARM体系结构的发展历程? ARM可以应用在哪些方面?
14
ARM是什么? ARM为什么存在? ARM有什么优势? ARM体系结构的发展历程? ARM可以应用在哪些方面?
15
三、ARM的优势
ARM微处理器的优点 ARM公司的优势
16
1.ARM微处理器的优点
体积小、功耗低、低成本、高性能; 支持Thumb(16位)/ARM(32位)双指令集,
31
参考文献
[1]何荣森,何希顺,张跃.从ARM体系看嵌入式处 理器的发展[J].微电子学与计算机,2002(5) :4245.
[2]王红展.基于嵌入式实时操作系统的ARM控制平 台的实现[D]. 成都:电子科技大学,2004.
[3]费浙平. ARM结构体系发展介绍[J]. 嵌入式系统开 发:技术讲座,2005(4):40-41.
ARM知识点讲解.
ARM知识点讲解.1、ARM处理器工作模式有几种?各种工作模式下分别有什么特点?答:ARM 处理器有7种工作模式,这7种模式及其特点是:快速中断模式(fiq)支持高速数据传输或通道处理,外部中断fiq信号有效且CPSR的F=0进入。
中断模式(irq)用于通用中断处理,外部中断irq信号有效CPSR的I=0进入。
管理员模式(svc)- 操作系统的保护模式,复位、软件中断进入。
主要用于SWI(软件中断)和OS(操作系统)。
这个模式有额外的特权,允许你进一步控制计算机。
中止模式(abt)- 支持虚拟内存和/或内存保护预取指令中止/数据中止进入未定义模式(und)- 支持硬件协处理器的软件仿真(浮点、向量运算)未定义指令进入系统模式(sys)- 支持操作系统的特殊用户模式(运行操作系统任务)用户模式(usr)正常的程序执行模式,此模式应用程序不能访问受操作系统保护的资源,不能改变模式,除非异常发生。
2、ARM处理器总共有多少个寄存器,这些寄存器按其在用户编程中的功能是如何划分的?这些寄存器在使用中各有何特殊之处?答:ARM微处理器共有37个32位寄存器,其中31个为通用寄存器,6个为状态寄存器。
31个通用寄存器根据其编程特点可分为如下几种类型:1、不分组寄存器R0-R7 为所有模式共享2、分组寄存器R8-R12R8_fiq-R12_fiq:FIQ模式下的寄存器R8-R12:其它模式共享3、分组寄存器R13-R14分为6组,用户、系统一组,其他每种模式一组。
R13_通常用作堆栈指针SP,R14_通常用作子程序链接寄存器,当进入子程序时,常用来保存PC的返回值其中,mode为以下几种模式之一:usr、fiq、irq、svc、abt、und。
4、程序寄存器R15(PC)所有模式共享6个状态寄存器:一个CPSR当前程序状态寄存器,保存当前程序状态。
五个程序状态备份寄存器SPSR(svc,abt,und,irq,frq),只有在异常模式下,才能被访问;各异常模式都拥有属于自己的SPSR,当发生异常时,SPSR用来保存CPSR的值,从异常退出时则可由SPSR 来恢复CPSR。
ARM入门教程.pdf

目录第1章 ARM微处理器概述 51.1 ARM-Advanced RISC Machines 51.2 ARM微处理器的应用领域及特点 51.2.1 ARM微处理器的应用领域 51.2.2 ARM微处理器的特点 61.3 ARM微处理器系列 61.3.1 ARM7微处理器系列 61.3.2 ARM9微处理器系列 71.3.3 ARM9E微处理器系列 71.3.4 ARM10E微处理器系列 71.3.5 SecurCore微处理器系列 81.3.6 StrongARM微处理器系列 81.3.7 Xscale处理器 81.4 ARM微处理器结构 81.4.1 RISC体系结构 81.4.2 ARM微处理器的寄存器结构 91.4.3 ARM微处理器的指令结构 91.5 ARM微处理器的应用选型 101.6 本章小节10第2章 ARM微处理器的编程模型 112.1 ARM微处理器的工作状态 112.2 ARM体系结构的存储器格式 112.3 指令长度及数据类型 122.4 处理器模式 122.5 寄存器组织 132.5.1 ARM状态下的寄存器组织 132.5.2 Thumb状态下的寄存器组织 152.5.3 程序状态寄存器 162.6 异常(Exceptions) 182.6.1 ARM体系结构所支持的异常类型 182.6.2 对异常的响应 182.6.3 从异常返回 192.6.4 各类异常的具体描述 192.6.5 异常进入/退出小节 202.6.6 异常向量(Exception Vectors) 202.6.7 异常优先级(Exception Priorities) 212.6.8 应用程序中的异常处理 212.7 本章小节21第3章 ARM微处理器的指令系统 223.1 ARM微处理器的指令集概述 223.1.1 ARM微处理器的指令的分类与格式 223.1.2 指令的条件域 233.2 ARM指令的寻址方式 233.2.1 立即寻址 243.2.2 寄存器寻址 243.2.2 寄存器间接寻址 243.2.3 基址变址寻址 243.2.4 多寄存器寻址 253.2.5 相对寻址 253.2.6 堆栈寻址 253.3 ARM指令集 253.3.1 跳转指令 253.3.2 数据处理指令 263.3.3 乘法指令与乘加指令 303.3.4 程序状态寄存器访问指令 323.3.5 加载/存储指令 323.3.6 批量数据加载/存储指令 343.3.7 数据交换指令 353.3.8 移位指令(操作) 353.3.9 协处理器指令 363.3.10 异常产生指令 383.4 Thumb指令及应用 383.5 本章小节39第4章 ARM程序设计基础 404.1 ARM汇编器所支持的伪指令 404.1.1 符号定义(Symbol Definition)伪指令 404.1.2 数据定义(Data Definition)伪指令 414.1.3 汇编控制(Assembly Control)伪指令 434.1.4 其他常用的伪指令 454.2 汇编语言的语句格式 484.2.1 在汇编语言程序中常用的符号 494.2.2 汇编语言程序中的表达式和运算符 494.3 汇编语言的程序结构 524.3.1 汇编语言的程序结构 524.3.2 汇编语言的子程序调用 524.3.3 汇编语言程序示例 534.3.4 汇编语言与C/C++的混合编程 554.4 本章小节56第5章应用系统设计与调试 575.1 系统设计概述 575.2 S3C4510B概述 585.2.1 S3C4510B及片内外围简介 585.2.2 S3C4510B的引脚分布及信号描述 615.2.3 CPU内核概述及特殊功能寄存器(Special Registers) 675.2.4 S3C4510B的系统管理器(System Manager) 725.3 系统的硬件选型与单元电路设计 825.3.1 S3C4510B芯片及引脚分析 825.3.2 电源电路 835.3.3 晶振电路与复位电路 835.3.4 Flash存储器接口电路 855.3.5 SDRAM接口电路 895.3.6 串行接口电路 935.3.7 IIC接口电路 945.3.8 JTAG接口电路 955.3.9 10M/100M以太网接口电路 965.3.10 通用I/O接口电路 1005.4 硬件系统的调试 1015.4.1 电源、晶振及复位电路 1015.4.2 S3C4510B及JTAG接口电路 1025.4.3 SDRAM接口电路的调试 1035.4.4 Flash接口电路的调试 1055.4.5 10M/100M以太网接口电路 1055.5 印刷电路板的设计注意事项 1055.5.1 电源质量与分配 1055.5.2 同类型信号线的分布 1065.6 本章小节 106 第6章部件工作原理与编程示例 1076.1 嵌入式系统的程序设计方法 1076.2 部件工作原理与编程示例 1086.2.1 通用I/O口工作原理与编程示例 1086.2.2 串行通讯工作原理与编程示例 1116.2.3 中断控制器工作原理与编程示例 1206.2.4 定时器工作原理与编程示例 1236.2.5 GDMA工作原理与编程示例 1276.2.6 IIC总线控制器工作原理 1336.2.7 以太网控制器工作原理 138主要特性139MAC功能模块 140 带缓冲DMA接口(Buffered DMA Interface) 144以太网控制器特殊功能寄存器(Ethernet Controller Special Registers) 147MAC寄存器(Media Access Control(MAC)Register) 154以太网控制器的操作(Ethernet Controller Operation) 160发送一个帧(Transmitting a Frame) 162接收一个帧(Receiving a Frame) 1626.2.8 Flash存储器工作原理与编程示例 1626.3 BootLoader简介 1676.4 本章小节 167 第7章嵌入式uClinux及其应用开发 1687.1 嵌入式uClinux系统概况 1687.2 开发工具GNU的使用 1707.2.1 GCC编译器 1707.2.2 GNU Make 1727.2.3 使用GDB调试程序 1777.3 建立uClinux开发环境 1807.3.1 建立交叉编译器 1817.3.2 uClinux针对硬件的改动 1847.3.3 编译uClinux内核 1857.3.4 内核的加载运行 1877.4 在uClinux下开发应用程序 1887.4.1 串行通信 1907.4.2 socket编程 1957.4 .3 添加用户应用程序到uClinux 2027.4.4 通过网络添加应用程序到目标系统 2057.5 本章小结 207 第8章ARM ADS集成开发环境的使用 2098.1 ADS集成开发环境组成介绍 2098.1.1 命令行开发工具 2098.1.2 ARM运行时库 2188.1.3 GUI开发环境(Code Warrior和AXD) 2198.1.4 实用程序 2218.1.5 支持的软件 2218.2 使用ADS创建工程 2228.2.1 建立一个工程 2228.2.2 编译和链接工程 2258.2.3 使用命令行工具编译应用程序 2298.3 用AXD进行代码调试 2308.4 本章小结 233第1章 ARM微处理器概述本章简介ARM微处理器的一些基本概念、应用领域及特点,引导读者进入ARM技术的殿堂。
ARM微处理器的指令系统
ARM微处理器的指令系统ARM微处理器的指令系统介绍ARM指令集、Thumb指令集,以及各类指令对应的寻址方式,通过对本章的阅读,希望读者能了解ARM微处理器所支持的指令集及具体的使用方法。
本章的主要内容有:- ARM指令集、Thumb指令集概述。
- ARM指令集的分类与具体应用。
- Thumb指令集简介及应用场合。
3.1 ARM微处理器的指令集概述3.1.1 ARM微处理器的指令的分类与格式ARM微处理器的指令集是加载/存储型的,也即指令集仅能处理寄存器中的数据,而且处理结果都要放回寄存器中,而对系统存储器的访问则需要通过专门的加载/存储指令来完成。
ARM微处理器的指令集可以分为跳转指令、数据处理指令、程序状态寄存器(PSR)处理指令、加载/存储指令、协处理器指令和异常产生指令六大类,具体的指令及功能如表3-1所示(表中指令为基本ARM指令,不包括派生的ARM指令)。
表3-1 ARM指令及功能描述3.1.2 指令的条件域当处理器工作在ARM状态时,几乎所有的指令均根据CPSR中条件码的状态和指令的条件域有条件的执行。
当指令的执行条件满足时,指令被执行,否则指令被忽略。
每一条ARM指令包含4位的条件码,位于指令的最高4位[31:28]。
条件码共有16种,每种条件码可用两个字符表示,这两个字符可以添加在指令助记符的后面和指令同时使用。
例如,跳转指令B可以加上后缀EQ变为BEQ表示“相等则跳转”,即当CPSR中的Z标志置位时发生跳转。
在16种条件标志码中,只有15种可以使用,如表3-2所示,第16种(1111)为系统保留,暂时不能使用。
表3-2 指令的条件码所谓寻址方式就是处理器根据指令中给出的地址信息来寻找物理地址的方式。
目前ARM指令系统支持如下几种常见的寻址方式。
3.2.1 立即寻址立即寻址也叫立即数寻址,这是一种特殊的寻址方式,操作数本身就在指令中给出,只要取出指令也就取到了操作数。
这个操作数被称为立即数,对应的寻址方式也就叫做立即寻址。
arm汇编指令集汇编入门第一篇小白也能看懂
arm汇编指令集汇编入门第一篇小白也能看懂如今,计算机科学与技术领域发展迅猛,其中包括一门被广泛应用的指令集架构—— ARM(Advanced RISC Machines)汇编指令集。
本文将从小白角度出发,向读者介绍ARM汇编指令集的基本概念和入门知识。
1. ARM汇编简介ARM汇编指令集是一种低级程序设计语言,用于在ARM微处理器上进行编程。
它不同于高级语言如C++或Java,具有较为底层的特性。
掌握ARM汇编指令集可以让开发者更深入地理解计算机内部运行原理,并能进行更加灵活和高效的编程。
2. ARM寄存器ARM汇编指令集使用一组寄存器来存储和处理数据。
其中,常用的寄存器有13个通用寄存器(R0-R12)、程序计数器(PC)、堆栈指针(SP)和链接寄存器(LR),另外还有一些特殊用途的寄存器。
这些寄存器提供了一种基于寄存器的计算模型,使得ARM汇编具有高效处理数据的能力。
3. 指令格式ARM汇编指令集的指令格式一般包括操作码和操作数。
操作码表示具体的操作,如加法、乘法等,而操作数则指定操作所需的寄存器和立即数等。
4. 数据处理指令ARM汇编指令集提供了一系列的数据处理指令,用于对寄存器中的数据进行处理。
这些指令包括基本的算术运算、逻辑运算以及移位操作等,可以实现各种数据处理需求。
5. 分支指令分支指令是ARM汇编指令集中常用的一类指令,用于根据条件进行跳转。
跳转指令可以在程序执行过程中改变程序执行的顺序,实现条件判断和循环等功能。
6. 存储器访问指令存储器访问指令用于在ARM汇编中对内存进行读写操作。
通过这些指令,可以将数据从寄存器中存储到内存中,或者将内存中的数据加载到寄存器中进行处理。
7. 输入输出指令输入输出指令用于实现与外部设备的交互。
例如,通过输入指令可以从键盘或其他输入设备中获取用户输入的数据,而通过输出指令可以将数据输出到显示器或其他输出设备中。
8. 常用例程ARM汇编指令集中有一些常用的例程,可以用于处理常见的编程任务。
ARM指令英文全称及功能描述
指令格式:指令{条件}{S} {目的Register},{OP1},{OP2} "{ }"中的内容可选。
即,可以不带条件只有目的寄存器,或只有目的寄存器和操作数1,也可以同时包含所有选项。
“S”决定指令的操作是否影响CPSR中条件标志位的值,当没有S时指令不更新CPSR中条件标志位的值助记符英文全称示例、功能跳转指令BBranch跳转指令B Label;程序无条件跳转到标号Label处执行BLBranch with Link带返回的跳转指令BL Label ;当程序无条件跳转到标号Label处执行时,同时将当前的PC值保存到R14中BLXBranch with Link and exchange带返回和状态切换的跳转指令BLX Label;从ARM指令集跳转到指令中所指定的目标地址,并将处理器的工作状态有ARM状态切换到Thumb状态,该指令同时将PC的当前内容保存到寄存器R14中BXBranch and exchange带状态切换的跳转指令BX Label ;跳转到指令中所指定的目标地址,目标地址处的指令既可以是ARM指令,也可以是Thumb指令数据处理MOVMove数据传送MOV R1,R0,LSL#3;将寄存器R0的值左移3位后传送到R1MVNMove NOT数据非传送MVN R0,#0 ;将立即数0取反传送到寄存器R0中,完成后R0=-1CMPCompare比较指令CMP R1,R0;将寄存器R1的值与寄存器R0的值相减,并根据结果设置CPSR的标志位CMNCompare negative负数比较指令CMN R1,R0 ;将寄存器R1的值与寄存器R0的值相加,并根据结果设置CPSR的标志位TSTTest位测试指令TST R1,#0xffe ;将寄存器R1的值与立即数0xffe按位与,并根据结果设置CPSR的标志位TEQTest equivalence相等测试指令TEQ R1,R2;将寄存器R1的值与寄存器R2的值按位异或,并根据结果设置CPSR的标志位ADDAdd加法运算指令ADD R0,R2,R3,LSL#1;R0 = R2 + (R3 << 1)ADCAdd with carry带进位加法ADCS R2,R6,R10;R2 = R6+R10+!C,且更新CPSR的进位标志位SUBSubtract减法运算指令SUB R0,R1,#256;R0 = R1 –256SBCSubtract with carry带进位减法指令SUBS R0,R1,R2 ;R0 = R1 - R2 - !C,并根据结果设置CPSR的进位标志位RSBReverse subtract逆向减法指令RSB R0,R1,R2 ;R0 = R2 –R1RSCReverse subtract with carry带进位逆向减法指令RSC R0,R1,R2;R0 = R2 –R1 - !CANDAnd逻辑与操作指令AND R0,R0,#3;该指令保持R0的0、1位,其余位清零。
arm的32位指令的格式及个部分功能
ARM的32位指令格式及各部分功能一、ARM的32位指令格式ARM的32位指令格式分为四部分,包括指令操作码、条件码、寄存器和操作数。
1. 指令操作码指令操作码是指令的基本操作类型,为了方便指令的译码和执行,ARM指令集将指令操作码分为几类,包括数据处理指令、分支指令、访存指令等。
不同的指令操作码代表了不同的操作类型,如加法、乘法、移位、与操作等。
2. 条件码条件码用于指定指令在何种条件下执行,如等于零、不等于零、大于、小于等。
通过条件码的设置,可以实现根据不同条件来执行不同的指令,这样可以提高指令的灵活性和效率。
3. 寄存器ARM的32位指令格式中包括多个寄存器字段,用于指定指令的操作对象和操作结果的存放位置。
ARM架构中一般有16个通用寄存器和几个特殊用途的寄存器,不同的寄存器字段代表了不同的寄存器编号。
4. 操作数操作数是指令的操作对象,ARM的32位指令中包括多个操作数字段,用于指定指令的源操作数和目的操作数。
操作数可以是寄存器、立即数或内存位置区域等。
二、各部分功能1. 指令操作码的功能指令操作码代表了指令的操作类型,不同的指令操作码对应了不同的操作,比如数据处理指令可以进行加法、减法、逻辑运算等操作,分支指令可以实现程序的跳转,访存指令可以进行内存的读写操作。
2. 条件码的功能条件码用于指定指令的执行条件,通过设置条件码可以实现根据不同条件来执行不同的指令,这样可以提高程序的执行效率和灵活性。
3. 寄存器的功能寄存器用于存放指令的操作对象和操作结果,ARM的32位指令中包括多个寄存器字段,用于指定指令的源操作数和目的操作数。
寄存器的功能包括存储数据、临时存储和传递参数等。
4. 操作数的功能操作数是指令的操作对象,ARM的32位指令中包括多个操作数字段,用于指定指令的源操作数和目的操作数。
操作数的功能包括指定操作对象、传递参数和存储数据等。
结论ARM的32位指令格式包括指令操作码、条件码、寄存器和操作数四部分,各部分都有特定的功能,通过它们的组合可以实现丰富多样的指令操作和灵活的程序控制。
ARM说明书
作品设计说明书烟台职业学院电子工程系设计者:邸平柱指导教师:王强作品设计摘要:本设计作品主要通过和按键空追,输出到STM32F207为芯片,采用按键模块,实现控制led数码管的显示的控制和led的控制,从而达到我们想要的效果,通过液晶屏显示我们要显示的字。
熟悉了EITP 平台的使用。
了解I2C总线的配置和工作原理、CH452芯片的工作原理并能操作数码管和按键、FSMC总线的配置方式和工作原理和掌握液晶显示器的使用方法。
关键字:STM32F207;液晶显示屏;按键;数码管;LED灯;电机。
作品设计 (2)一、项目背景 (1)概述 (1)2、作品简介 (1)二、方案设计 (1)1、总体设计方案 (1)2、系统模块设计方案 (2)2.1 主控模块: (2)和按键模块: (2)显示模块 (3)步进电机模块 (4)、系统总体结构 (4)三、原理阐述与分析 (5)1、系统主程序分析 (5)2、功能分析 (6)电源模块电路图 (6)2.2 LED电路原理图 (7)继电器模块图 (7)蜂鸣器模块图 (8)数码管电路控制原理图 (8)键盘电路原理 (9)步进电机驱动原理图 (9)2.8 复位电路原理图 (10)四、运行与测试 (10)1.硬件相关设置 (10)2.操作步骤 (10)五、常见故障排除 (11)1、常见故障排除 (11)2、常见故障排除 (11)3、常见故障排除 (11)4、常见故障排除 (11)5、常见故障排除 (11)六、总结 (11)七、参考文献 (12)八、附录 (12)附录一:系统框图 (12)附录二:C8051F020处理器内部结构 (13)一、项目背景概述1.熟悉EITp平台的使用2.了解I2C总线的配置和工作原理3.了解CH452芯片的工作原理并能操作数码管和按键4.掌握LCD液晶的显示原理5.掌握GBK字库操作方法6.掌握SD卡以及文件系统操作方法2、作品简介本作品主要是通过按键控制数码管的显示,LED灯的亮灭和蜂鸣器的工作,通过液晶显示屏显示我们要显示的文字.二、方案设计1、总体设计方案系统主要由主控板、按键、led、蜂鸣器、液晶显示显示五大部分组成。
arm的用法 -回复
arm的用法-回复ARM的用法ARM架构(Advanced RISC Machines)是一种基于精简指令集计算机(RISC)的处理器架构,广泛应用于移动设备、嵌入式系统和物联网设备等领域。
ARM架构的广泛使用使得掌握ARM的用法变得至关重要。
本文将一步一步回答关于ARM用法的问题,以帮助读者更好地了解和应用ARM。
1. ARM的基本概念首先,我们需要了解ARM的基本概念。
ARM采用了精简指令集架构,即指令集中的指令数量和种类相对较少。
ARM架构的设计目标是提供高效率的计算能力和低功耗的设计。
ARM处理器具有较小的晶体管数量和较低的功耗要求,因此非常适合嵌入式设备和移动设备等场景。
2. ARM指令集和寄存器ARM指令集包括了一系列特定功能的指令,用于完成不同的计算任务。
ARM指令集可分为三种:ARM指令、Thumb指令和Thumb-2指令。
ARM指令是32位指令,用于高性能计算。
Thumb指令是16位指令,用于更低功耗的计算。
Thumb-2指令集结合了ARM指令和Thumb指令,提供了更好的灵活性和兼容性。
ARM处理器有多个寄存器,用于存储和处理数据。
常见的寄存器包括程序计数器(PC)、堆栈指针(SP)和程序状态寄存器(PSR)。
程序计数器存储下一条将被执行的指令地址。
堆栈指针用于管理函数调用时的参数传递和局部变量存储。
程序状态寄存器用于标志处理器的当前状态,如条件码、中断使能等。
3. ARM汇编语言ARM汇编语言是一种基于ARM指令集的低级语言。
通过编写ARM汇编代码,我们可以直接操作处理器的底层功能和资源。
ARM汇编语言具有紧凑的语法和直观的指令表达,可以通过读取和理解ARM架构手册来学习和使用。
ARM汇编语言使用伪指令(Pseudo-Instruction)来进行宏展开和程序控制。
伪指令是一种不被处理器执行的指令,而是由汇编器解释和处理的。
伪指令可以用于定义数据、变量、标签和宏等。
4. ARM开发工具和环境在使用ARM进行开发时,我们需要选择适当的开发工具和环境。
ARM简介辅助讲稿
一、ARM是什么ARM处理器(Advanced RISC Machines),既可以认为是一个公司的名字,也可以认为是该公司用来开发RISC微处理器的一种技术,还可以认为是采用该技术开发的一类微处理器的统称。
本节从这三个方面解释ARM是什么。
在介绍ARM时简单解释了一下其全称中RISC的含义:RISC (reduced instruction set computer,精简指令集计算机)是一种执行较少类型计算机指令的微处理器,起源于80 年代的MIPS主机(即RISC 机),RISC机中采用的微处理器统称RISC处理器。
这样一来,它能够以更快的速度执行操作(每秒执行更多百万条指令,即MIPS)。
因为计算机执行每个指令类型都需要额外的晶体管和电路元件,计算机指令集越大就会使微处理器更复杂,执行操作也会更慢。
二、ARM为什么存在ARM最初是为了设计基于RISC结构的微处理器而产生,要了解ARM为什么存在要先了解RISC体系结构为什么存在。
为了改进传统的CISC体系的种种缺点,产生了RISC体系结构,进而产生了ARM。
本节从RISC体系结构的诞生和ARM的诞生两个方面解释ARM为什么存在。
三、ARM的优势本节从ARM微处理器的优点和ARM公司运营模式的优势两方面介绍ARM的优势,解释了为什么基于ARM技术的微处理器应用约占据了32位RISC微处理器75%以上的市场份额。
四、ARM体系结构的发展ARM体系结构从诞生至今经历了多个版本,V1~V3版本是早期版本,未用于商业授权。
V4版本在原来32位指令集的基础上增加了一套16位的Thumb 指令集,所以又叫V4T版本。
增加的Thumb指令集提高了软件代码密度,并且在系统数据总线不足32位(8位或16位数据总线的系统)的有限系统下提高了系统性能。
V5版本相对于V4做了很多改进,增强了对于ARM和Thumb 两套指令集之间进行切换的支持,并扩展了指令集,增加了一些DSP 运算的常见指令,所以V5版本又叫V5TE版本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论坛推荐:新手必看,关于ARM的22个常用概念2014-04-22 电子发烧友网新手必看,关于ARM的22个常用概念!1.ARM中一些常见英文缩写解释MSB:最高有效位;LSB:最低有效位;AHB:先进的高性能总线;VPB:连接片内外设功能的VLSI外设总线;EMC:外部存储器控制器;MAM:存储器加速模块;VIC:向量中断控制器;SPI:全双工串行接口;CAN:控制器局域网,一种串行通讯协议;PWM:脉宽调制器;ETM:嵌入式跟踪宏;CPSR:当前程序状态寄存器;SPSR:程序保护状态寄存器;2.MAM 使用注意事项:答:当改变MAM 定时值时,必须先通过向MAMCR 写入0 来关闭MAM,然后将新值写入MAMTIM。
最后,将需要的操作模式的对应值写入MAMCR,再次打开MAM。
对于低于20MHz 的系统时钟,MAMTIM 设定为001。
对于20MHz 到40MHz 之间的系统时钟,建议将Flash访问时间设定为2cclk,而在高于40MHz的系统时钟下,建议使用3cclk。
3.VIC 使用注意事项答:如果在片内RAM当中运行代码并且应用程序需要调用中断,那么必须将中断向量重新映射到Flash地址0x0。
这样做是因为所有的异常向量都位于地址0x0及以上。
通过将寄存器MEMMAP(位于系统控制模块当中)配置为用户RAM模式来实现这一点。
用户代码被连接以便使中断向量表装载到0x4000 0000。
4.ARM启动代码设计答:ARM启动代码直接面对处理器内核和硬件控制器进行编程,一般使用汇编语言。
启动代码一般包括:中断向量表初始化存储器系统初始化堆栈初始化有特殊要求的端口、设备初始化用户程序执行环境改变处理器模式呼叫主应用程序5.IRQ 和FIQ 之间的区别答:IRQ和FIQ是ARM处理器的两种编程模式。
IRQ是指中断模式,FIR是指快速中断模式。
对于FIQ 你必须尽快处理你的事情并离开这个模式。
IRQ 可以被FIQ 所中断,但IRQ 不能中断FIQ。
为了使FIQ 更快,所以这种模式有更多的影子寄存器。
FIQ 不能调用SWI(软件中断)。
FIQ 还必须禁用中断。
如果一个FIQ 例程必须重新启用中断,则它太慢了,并应该是IRQ 而不是FIQ。
6.ARM处理器对异常中断的响应过程答:ARM处理器对异常中断的响应过程如下所述:保存处理器当前状态、中断屏蔽位以及各条件标志位;设置当前程序状态寄存器CPSR中的相应位;将寄存器lr_mode设置成返回地址;将程序计数器值PC,设置成该异常中断的中断向量地址,跳转到相应异常中断处执行。
7.ARM指令与Thumb指令的区别答:在ARM体系结构中,ARM指令集中的指令是32位的指令,其执行效率很高。
对于存储系统数据总线为16位的应用系统,ARM体系提供了Thumb指令集。
Thumb指令集是对ARM指令集的一个子集重新编码得到的,指令长度为16位。
通常在处理器执行ARM程序时,称处理器处于ARM状态;当处理器执行Thumb程序时,称处理器处于Thumb状态。
Thumb指令集并没有改变ARM体系地层的程序设计模型,只是在该模型上加上了一些限制条件。
Thumb指令集中的数据处理指令的操作数仍然为32位,指令寻址地址也是32位的。
8.什么是ATPCS 答:为了使单独编译的C语言程序和汇编程序之间能够相互调用,必须为子程序之间的调用规定一定的规则。
ATPCS就是ARM程序和Thumb程序中子程序调用的基本规则。
这些规则包括寄存器使用规则,数据栈的使用规则,参数的传递规则等。
9.ARM程序和Thumb程序混合使用的场合答:通常,Thumb程序比ARM程序更加紧凑,而且对于内存为8位或16位的系统,使用Thumb程序效率更高。
但是,在下面一些场合下,程序必须运行在ARM状态,这时就需要混合使用ARM和Thumb程序。
强调速度的场合,应该使用ARM程序;有些功能只能由ARM 程序完成。
如:使用或者禁止异常中断;当处理器进入异常中断处理程序时,程序状态切换到ARM状态,即在异常中断处理程序入口的一些指令是ARM指令,然后根据需要程序可以切换到Thumb 状态,在异常中断程序返回前,程序再切换到ARM状态。
ARM 处理器总是从ARM状态开始执行。
因而,如果要在调试器中运行Thumb程序,必须为该Thumb程序添加一个ARM程序头,然后再切换到Thumb状态,执行Thumb程序。
10.ARM处理器运行模式答:ARM微处理器支持7种运行模式,分别为:用户模式(usr):ARM处理器正常的程序执行状态;快速中断模式(fiq):用于高速数据传输或通道管理;外部中断模式(irq):用于通用的中断处理;管理模式(svc):操作系统使用的保护模式;数据访问终止模式(abt):当数据或指令预取终止时进入该模式,用于虚拟存储及存储保护;系统模式(sys):运行具有特权的操作系统任务;未定义指令中止模式(und):当未定义指令执行时进入该模式,可用于支持硬件协处理器的软件仿真。
11.ARM体系结构所支持的异常类型答:ARM体系结构所支持的异常和具体含义如下(圈里面的数字表示优先级):复位①:当处理器的复位电平有效时,产生复位异常,程序跳转到复位异常处执行(异常向量:0x0000,0000);未定义指令⑥:当ARM 处理器或协处理器遇到不能处理的指令时,产生为定义异常。
可使用该异常机制进行软件仿真(异常向量:0x0000,0004);软件中断⑥:有执行SWI指令产生,可用于用户模式下程序调用特权操作指令。
可使用该异常机制实现系统功能调用(异常向量:0x0000,0008);指令预取中止⑤:若处理器的预取指令的地址不存在,或该地址不允许当前指令访问,存储器会向处理器发出中止信号,当预取指令被执行时,才会产生指令预取中止异常(异常向量:0x0000,000C);数据中止②:若处理器数据访问的指令的地址不存在,或该地址不允许当前指令访问,产生数据中止异常(异常向量:0x0000,0010);IRQ④(外部中断请求):当处理器的外部中断请求引脚有效,且CPSR 中的I位为0时,产生IRQ异常。
系统的外设可以该异常请求中断服务(异常向量:0x0000,0018);FIQ③(快速中断请求):当处理器的快速中断请求引脚有效,且CPSR中的F位为0时,产生FIQ 异常(异常向量:0x0000,001C)。
说明:其中异常向量0x0000,0014为保留的异常向量。
12.ARM体系结构的存储器格式答:ARM体系结构的存储器格式有如下两种:大端格式:字数据的高字节存储在低地址中,字数据的低字节存放在高地址中;小端格式:与大端存储格式相反,高地址存放数据的高字节,低地址存放数据的低字节。
13.ARM寄存器总结:ARM有16个32位的寄存器(r0到r15)。
r15充当程序寄存器PC,r14(link register)存储子程序的返回地址,r13存储的是堆栈地址。
ARM有一个当前程序状态寄存器:CPSR。
一些寄存器(r13,r14)在异常发生时会产生新的instances,比如IRQ处理器模式,这时处理器使用r13_irq和r14_irq ARM的子程序调用是很快的,因为子程序的返回地址不需要存放在堆栈中。
14.存储器重新映射(Remap)的原因:使Flash存储器中的FIQ处理程序不必考虑因为重新映射所导致的存储器边界问题;用来处理代码空间中段边界仲裁的SRAM和Boot Block向量的使用大大减少;为超过单字转移指令范围的跳转提供空间来保存常量。
ARM中的重映射是指在程序执行过程中通过写某个功能寄存器位操作达到重新分配其存储器地址空间的映射。
一个典型的应用就是应用程序存储在Flash/ROM中,初始这些存储器地址是从0开始的,但这些存储器的读时间比SRAM/DRAM长,造成其内部执行频率不高,故一般在前面一段程序将代码搬移到SRAM/DRAM中去,然后重新映射存储器空间,将相应SRAM/DRAM映射到地址0,重新执行程序可达到高速运行的目的。
15.存储异常向量表中程序跳转使用LDR指令,而不使用B 指令的原因:LDR指令可以全地址范围跳转,而B指令只能在前后32MB范围内跳转;芯片具有Remap功能。
当向量表位于内部RAM或外部存储器中,用B指令不能跳转到正确的位置。
16.锁相环(PLL)注意要点:PLL在芯片复位或进入掉电模式时被关闭并旁路,在掉电唤醒后不会自动恢复PLL的设定;PLL只能通过软件使能;PLL在激活后必须等待其锁定,然后才能连接;PLL如果设置不当将会导致芯片的错误操作。
17.ARM7与ARM9的区别:ARM7内核是0.9MIPS/MHz 的三级流水线和冯&S226;诺伊曼结构;ARM9内核是五级流水线,提供1.1MIPS/MHz的哈佛结构。
ARM7没有MMU,ARM720T 是MMU的;ARM9是有MMU的,ARM940T只有Memory protection unit.不是一个完整的MMU。
ARM7TDMI提供了非常好的性能——功耗比。
它包含了Thumb指令集快速乘法指令和ICE调试技术的内核。
ARM9的时钟频率比ARM7更高,采用哈佛结构区分了数据总线和指令总线。
18.VIC的基本操作如下:答:设置IRQ/FIQ中断,若是IRQ 中断则可以设置为向量中断并分配中断优先级,否则为非向量IRQ。
然后可以设置中断允许,以及向量中断对应地址或非向量中断默认地址。
当有中断后,若是IRQ中断,则可以读取向量地址寄存器,然后跳转到相应的代码。
当要退出中断时,对向量地址寄存器写0,通知VIC中断结束。
当发生中断时,处理器将会切换处理器模式,同时相关的寄存器也将会映射。
19.使用外部中断注意把某个引脚设置为外部中断功能后,该引脚为输入模式,由于没有内部上拉电阻,所以必须外接一个上拉电阻,确保引脚不被悬空;除了引脚连接模块的设置,还需要设置VIC模块,才能产生外部中断,否则外部中断只能反映在EXTINT 寄存器中;要使器件进入掉电模式并通过外部中断唤醒,软件应该正确设置引脚的外部中断功能,再进入掉电模式。
20.UART0的基本操作方法设置I/O连接到UART0;设置串口波特率(U0DLM、U0DLL);设置串口工作模式(U0LCR、U0FCR);发送或接收数据(U0THR、U0RBR);检查串口状态字或等待串口中断(U0LSR)。
21.I2C的基本操作方法答:I2C主机基本操作方法:设置I2C管脚连接;设置I2C时钟速率(I2SCLH、I2SCLL);设置为主机,并发送起始信号(I2CONSET的I2EN、STA位为1,AA位为0);发送从机地址(I2DAT),控制I2CONSET发送;判断总线状态(I2STAT),进行数据传输控制;发送结束信号(I2CONSET)。