CogneVisionPro软件简介及其目标识别定位功能
康耐视VisionPro软件操作手册V10

广州三拓识别技术有限公司GUANGZHOU SANTUO INDETIFCATION TECH.CO.,LTD.康耐视VisionPro操作手册V1.02013522‐‐•设置IP地址•获取图像•图像定位•条码检测•结果输出(超级终端)设置IP地址1,手动配置电脑网卡的IP地址。
如下图:2,从开始菜单/Cognex菜单下打开GigE Vision Configuration Tool.VisionPro以太网相机IP地址配置软件3,配置相机的IP地址与电脑对应网卡的IP地址为同一个网段。
获取图像1,启动VisionPro主程序2,双击image Source (图像来源) 打开设置对话框。
3,选择“照相机”。
并从相机列表里选择对应的相机。
然后视频格式选择“Mono”。
注明:Mono表示黑白图像。
4,点击“初始化取相”,修改曝光时间为0.5ms.取消时限前面的勾。
说明:”时限”即取图像超时。
表示执行了取图像的命令,但在设定时间内没有获取到图像。
多在外部触发模式时,等待外部电眼等触发信号时间过长而报错。
5,点击左Image Source 窗口左上角的相机符号,即显示实时画面。
在画面上点击右键来缩放图像等。
6,若需要设置为外部电眼触发。
可切换到“闪光灯和触发器”页面。
选择“硬件自动”选项。
图像定位1,选择“作业编辑器”窗口。
点击左上角的“单次运行作业”按钮。
获取一张图像。
2,从窗口工具栏的“显示VisionPro工具”打开工具窗口。
里面为此软件的检测算法。
3,定位图像设置步骤。
首先从工具窗口拖动CogPMAlignTool和CogFixtureTool到作业编辑器。
并按住鼠标左键对这两个工具进行连线编程。
如下图。
4,双击CogPMAlignTool1,在弹出的窗口对其参数进行设置。
首先点击“抓取训练图像”按钮。
“训练图像”表示一张标准的图像。
若相机现在拍的图像不是很理想,则重新执行拍照动作后再点击此按钮。
第4讲VisionPro视觉工具CogPMAlignTool
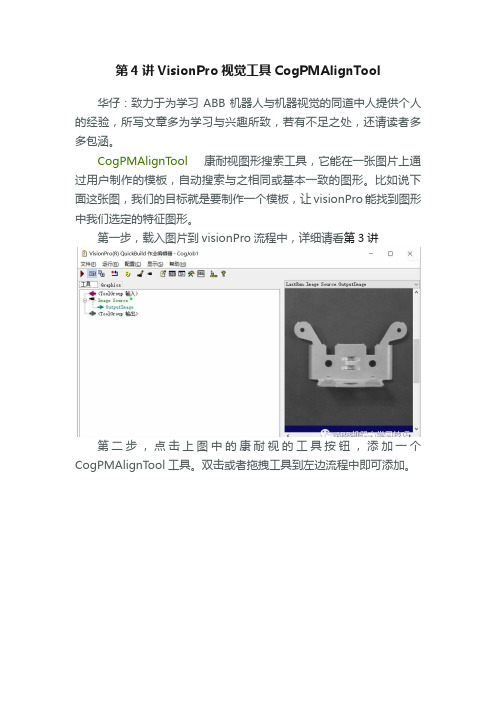
第4讲VisionPro视觉工具CogPMAlignTool华仔:致力于为学习ABB机器人与机器视觉的同道中人提供个人的经验,所写文章多为学习与兴趣所致,若有不足之处,还请读者多多包涵。
CogPMAlignT ool康耐视图形搜索工具,它能在一张图片上通过用户制作的模板,自动搜索与之相同或基本一致的图形。
比如说下面这张图,我们的目标就是要制作一个模板,让visionPro能找到图形中我们选定的特征图形。
第一步,载入图片到visionPro流程中,详细请看第3讲第二步,点击上图中的康耐视的工具按钮,添加一个CogPMAlignT ool工具。
双击或者拖拽工具到左边流程中即可添加。
第三步,将image source中的资源输出连接到该工具的图形输入inputimage中,拖拽即可连接。
第四步,双击工具进入工具编辑界面。
第五步,并点击抓取图像按钮,点击之后旁边的训练按钮就会变成可点击状态。
第六步,点击右边图形显示窗口上的下拉列表,选择current.trainimage。
可以看到图像左上角出现了一个小方框,使用鼠标左键拖拽移动到即将选择的特征位置,并将特征图形框入其中。
第七步,点击左边的训练按钮可以看到左边的显示框中出现了我们选中的特征图形。
第八步,设置训练区域与原点。
第九步,设置运行参数。
第十步,点击右边图像上的下拉列表,选中lastrun.inputimage 选项,查看模板的运行情况,成功就会显示绿色的方框与十字型的中心。
成功运行之后,在该工具界面的左下角有一个绿色的小灯,如果失败,灯就会变成红色。
如此,我们的模板就制作成功了,特征区域就会被绿色的方框框出来,方便我们接下来的处理。
参考目录:代码狗更多内容请点击上方 ABB机器人学习技巧关注也可点击公众号下方分类目录浏览更多内容。
基于VisionPro的数字图像识别与定位
基于VisionPro的数字图像识别与定位【摘要】本文利用VisionPro视觉软件进行数字图像识别与定位研究。
首先利用该软件实现了图像采集和摄像机标定,然后基于VisionPro运用VB编写人机交互界面,利用采集得到的图像进行了目标识别定位。
同时利用视觉处理中常用的工具Opencv对采集的图像进行了相同的目标识别定位。
对两种方法得到的识别效果和定位数据进行了对比,结果表明,基于VisionPro的视觉系统得到的识别效果更好,定位数据更准确。
【关键词】机器视觉;VisionPro;识别定位;1.引言自20世纪80年代以来,机器视觉技术开始高速发展,已经从实验室走向了人们生产生活的各个方面。
机器视觉系统的特点是提高生产的柔性和自动化程度。
在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。
而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。
现今,在机器视觉领域已经有了一些成熟的视觉开发软件,其封装了很多可靠、高效的算法和工具。
本文选用美国康耐视公司的VisionPro软件,这是一套基于PC架构的视觉系统软件开发包,主要应用于各种复杂的机器视觉领域。
它集成了用于定位、检测、识别和通讯等任务的工具库,可用C#、VB和VC等语言进行二次开发。
本文基于VisionPro利用语言进行视觉定位系统的软件开发[1]。
2.视觉定位系统2.1 硬件组成在图像处理前首先要得到清晰、有效的图像,这就需要有一套完整的硬件设备。
一般主要包括照明用的光源、调节图像清晰度的镜头、将图像转换为数字信号的摄像机和进行图像处理的计算机。
其中摄像机与计算机之间的接口也比很重要的,主要分为IEEE1394和采集卡,USB2.0或Gigabit Ethernet千兆网三种[2]。
本视觉系统采用的是日本FUJINON工业摄像头,德国BASLER工业像机ACA1600-20GM,GigE千兆网接口。
VisionPro功能介绍03_1_PMAlign-CN

预期匹配 偶然的匹配
1
弹性
• 弹性 是一个高级参 数,在查找与原来 的受训图案存在一 些几何形状变化的 元件时很有用途
显示高级参数
1
弹性
弹性,是一个运行期间参数,用来指
定您允许PatMax 忍受非线性几何形 状变化的程度
弹性以像素为单位进行测量,通常为0 到8 在您提高弹性时,PatMax 可能找到 非预期的匹配- 精确降低
1
图案区域和原点
• 在使用图形时
– 拖动并调整图案周围训 练框的大小 – 在适当的位置上定位原 点
1
图案区域和原点
• 下一步,定义包含要 训练的图案的像素区 域和图案原点
– 使用图形或者在训练 区域和原点标签中输 入值
1
模型原点
• 在PatMax定位搜索场景中模型的实例时,模型原 点 可以辨别要向您报告的点 • 要维持最高的精确度,原点必须放置图案区域的中 心
1
精度限制
• PatMax 使用精细和粗糙限制之间的精度范围 • 使得粒度更粗糙(更高):
– 提高速度 – 降低精确度 – 探测粗糙并且减弱精细特征(可能是好的也可能是坏的)
• 使得粒度更精细(更低):
– 降低速度 – 提高线性精确度 – 探测精细并且减弱粗糙特征 (可能是好的也可能是坏的)
1
人工建模
1
如何使得PatMax 更快
• 控制您能控制的并且告诉PatMax 您所知道的元件 • 了解哪些参数影响执行时间
1
参数和执行时间
• 搜索 “体积”越大,执行时间可能越长 – (宽) × (高) × (角度区域) × (刻度区域) • 减小接受阀值强迫更多的探索 • 加大所要求的结果的数量使得执行时间稍长 • 减小精细粒度限制增加时间(更高细节要解析) • 提高粗糙粒度限制减少时间(但是确保探测到必要的特征) • 考虑极性 稍微提高速度 • 设置对比阀值 > 0.0,便于更快地执行
基于VisionPro的数字图像识别与定位
基于VisionPro的数字图像识别与定位作者:韩庆瑶等来源:《电子世界》2013年第15期【摘要】本文利用VisionPro视觉软件进行数字图像识别与定位研究。
首先利用该软件实现了图像采集和摄像机标定,然后基于VisionPro运用VB编写人机交互界面,利用采集得到的图像进行了目标识别定位。
同时利用视觉处理中常用的工具Opencv对采集的图像进行了相同的目标识别定位。
对两种方法得到的识别效果和定位数据进行了对比,结果表明,基于VisionPro的视觉系统得到的识别效果更好,定位数据更准确。
【关键词】机器视觉;VisionPro;识别定位;1.引言自20世纪80年代以来,机器视觉技术开始高速发展,已经从实验室走向了人们生产生活的各个方面。
机器视觉系统的特点是提高生产的柔性和自动化程度。
在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。
而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。
现今,在机器视觉领域已经有了一些成熟的视觉开发软件,其封装了很多可靠、高效的算法和工具。
本文选用美国康耐视公司的VisionPro软件,这是一套基于PC架构的视觉系统软件开发包,主要应用于各种复杂的机器视觉领域。
它集成了用于定位、检测、识别和通讯等任务的工具库,可用C#、VB和VC等语言进行二次开发。
本文基于VisionPro利用语言进行视觉定位系统的软件开发[1]。
2.视觉定位系统2.1 硬件组成在图像处理前首先要得到清晰、有效的图像,这就需要有一套完整的硬件设备。
一般主要包括照明用的光源、调节图像清晰度的镜头、将图像转换为数字信号的摄像机和进行图像处理的计算机。
其中摄像机与计算机之间的接口也比很重要的,主要分为IEEE1394和采集卡,USB2.0或Gigabit Ethernet千兆网三种[2]。
Cognex的VisionPro的Checkerboard Calibration Tool中文说明
Checkerboard Calibration Tool Edit Control本主题包含以下章节。
•Control Buttons (控件按钮)•Calibration Info•Calibrate Tab (Calibrate 选项卡)•Origin Tab (Origin 选项卡)•Warping Tab (Warping 选项卡)•Run Params Tab (Run Params 选项卡)•Graphics Tab (Graphics 选项卡)•Point Results Tab (Point Results 选项卡)•Transform Results Tab (Transform Results 选项卡)Checkerboard Calibration 工具编辑控件为CogCalibCheckerboardTool工具提供图形用户界面,此工具可校正应用程序以保证其返回的结果具有有意义的值。
为应用程序添加Checkerboard Calibration 工具后,您的图像分析工具便能以特定度量单位返回结果,如英寸、厘米以及毫米等。
Checkerboard Calibration 工具用于定位棋盘风格校正板的图像中的顶点(或点网格风格板上的点),以及确定所找到图像的位置与板的物理尺寸之间的最佳二维转换。
此工具可生成线性转换,也可生成会导致光学和透视失真的非线性转换。
如果使用linescan camera,Checkerboard Calibration 工具还支持非线性转换。
注意:Checkerboard Calibration 工具支持checkerboard和grid-of-dots校正板。
Cognex 建议将CogCalibCheckerboardTool和棋盘校正板配合使用。
为了保证兼容性,也支持点网格板。
您无需明确指定希望使用的计量标准。
作为配置Checkerboard Calibration 工具的一部分,以您希望使用的度量单位定义网格间距(瓦片高度和宽度或点间距)。
visionpro中cogimageconverttool简介

VISIONPRO中COGIMAGECONVERTTOOL简介VisionPro是一款由Cognex公司开发的图像处理软件,旨在为制造业提供高效的视觉检测和图像处理解决方案。
CogImageConvertTool是VisionPro中的一个重要工具,主要用于图像格式的转换和处理。
本文将深入介绍CogImageConvertTool的功能、用途以及在视觉应用中的应用场景。
1.CogImageConvertTool的基本概述CogImageConvertTool是VisionPro软件套件中的一部分,作为图像转换工具,其主要功能包括:图像格式转换:CogImageConvertTool能够快速、准确地将不同格式的图像进行转换,支持常见的图像格式如JPEG、BMP、PNG等。
图像预处理:通过CogImageConvertTool,用户可以进行图像的基本预处理,例如调整亮度、对比度、图像大小等,以满足不同应用的需求。
色彩空间转换:该工具支持对图像的色彩空间进行转换,使用户能够在不同的色彩表示之间进行切换,确保图像在不同设备和环境中的显示一致性。
2.CogImageConvertTool的应用场景2.1视觉检测系统在制造业中,视觉检测系统广泛应用于产品质量检测和缺陷识别。
CogImageConvertTool可用于处理不同传感器或相机采集的图像,将其转换为适用于视觉算法的标准格式,从而提高检测精度和稳定性。
2.2图像数据集处理在机器学习和深度学习应用中,构建高质量的图像数据集对于模型的训练至关重要。
CogImageConvertTool可以用于调整和转换数据集中的图像,确保其符合模型训练的要求,提高模型的性能。
2.3医学图像处理在医学领域,医学图像的处理和分析对于疾病诊断和治疗规划至关重要。
CogImageConvertTool可以帮助医学专业人员将不同来源的医学图像转换为标准格式,以进行统一的分析和比较。
Cognex康耐视相机操作使用说明书

康耐视相机操作使用说明书文件状态:■草稿□修改□定稿文档密级□不保密■内部□机密项目名称版本号 1.0描述康耐视相机操作使用说明书编写人余国鹰编写日期2015/9/10 审核人审核日期目录一、康耐视相机具体设置 (3)1.1软件安装................................................... 错误!未定义书签。
1.2流程编辑 (3)1.3C ODESYS通信注意事项 (6)二、相机标定 (7)2.1相机校准 (7)2.2绝对坐标实现 (9)2.3相对坐标实现 (10)三、示教器示例程序 (11)3.1绝对坐标实现范例 (11)3.2相对坐标实现范例 (11)四、CODESYS逻辑开发 (13)4.1S OCKET通信开发 (13)4.2外部点数据处理 (14)五、细节说明 (18)一、康耐视相机具体设置1.1软件安装双击康耐视相机软件Cognex_In-Sight_Software_4.8.1,按照步骤一步步安装即可。
1.2流程编辑1. 设置电脑本地连接IPV4地址为192.168.39.12(设置为39段即可)。
2. 双击康耐视In-Sight浏览器软件进入相机设置界面,软件会自动搜索连接的相机设备,如下图1.1所示。
图1.13. 双击相机设备(红色椭圆内设备图标),进入相机编辑界面,如下图1.2所示。
图1.24. 在应用程序步骤中,开始、设置工具、配置结果、完成这4个步骤形成一个完整的相机操作流程;开始单击“开始”中“已连接”,如下图1.3所示,可以进行连接设备、断开设备、刷新、添加等操作。
图1.3单击“开始”中的“设置图像”,如下图1.4所示。
在“采集/加载图像”对话框中,“触发器”按钮是进行拍照,“实况视频”按钮是实时显示相机中的图像,“从PC加载图像”按钮是加载一张存在的图像。
图1.4在“编辑采集设置”对话框中,设置一系列相机参数,根据具体需要进行调节设置工具单击“设置工具”中“定位部件”按钮,对检测模型进行定位,作为识别的模型进行对比;单击“设置工具”中“检测部件”按钮,对模型进行编辑操作。
VisionPro功能介绍06_1_CaliperGeometry-CN

1
边线筛选
• 边线筛选的目的是从输入图像中消除噪音
投影
像素值图形
筛选后输出的图形
边线峰值
1
边线筛选
• 游标卡尺工具通 过使用一个筛选 算子盘旋一维投 影图像来执行筛
选
1
边线筛选
• 筛选尺寸接近边线尺寸生产较强的边线峰值 • 筛选尺寸太大或者太小会减少峰值
尖边线(1个像素宽) 筛选宽度= 2
钝边线(5个像素宽)
1
图形
• 显示找到的边线在报告的 边线处的 LastRun.InputImage中绘制 绿线
1
图形
• 其余结果图形在 LastRun.RegionData中显示 • 用于解释在您的图像中发 生了什么
1
图形
• 显示仿射转换图像将像 素从区域添加到区域数 据(RegionData)
1
结果表格
• 结果按照得分从高到低的顺序显示在结果表格中
• 当您想要探测的边线没有报告时怎么办? 或者
• 当您不想探测的边线被作为结果报告时怎么办?
1
计分
• 默认状态下,单个边线只根据它们跨边线的对比度进行 计分,而边线对子根据所测边线之间的距离与预期距离 匹配程度来计分。
• 有时,您需要修改如何给边线计分以便可靠地返回您实 际想要查找的那些。这时就需要添加其他的计分函数。
1
大图片– 运行期间
创建投影图像
应用边缘筛选
应用对比和极性筛 选
计分其余边缘待选 项 返回得分最高的边缘
1
投影
• 投影 将二维图像减少到一维图 像
– 减少处理时间和存储 – 维持并且在一些情况下增强边 线信息
投影箭头
图像
扫描箭头
VisionPro 3D
SearchMax. 是康耐视的一款色彩搜索工具,可以按颜 色区分物体。对于食品、装瓶和包装应用极为有用。 SearchMax 还可以基于强度(亮度)发现单色图案。 PatFlex. 旨在校准有皱的或变形包装的图案。PatFlex 是处理塑料袋或类似产品应用的完美之选。
3D 姿态确定 VisionPro 3D 的最后步骤是确定对象姿态。VisionPro 3D 采用 2D 功能并通过三角测量来检测对象位置。 有多种使用 VisionPro 3D 的方法,包括: • 多相机 3D 三角测量。 多相机三角测量涉及了多个广泛 分布的相机。这是最为精确的使用方法,因为系统可以通 过三角测量从多角度检测单个特征。即便一个或多个特征 未能被所有相机发现,这一功能也仍十分强大。 • 双相机短基线 3D。短基线 3D 涉及了所有近乎平行安 装(即立体)的相机。这种方法极大的简化了训练,因为 相机可以分享相同的 2D 功能模式。 立体 3D 尤其适用于 机器人引导应用。 • 多相机混合应用。 VisionPro 3D 还可对固定和机器人安 装相机进行混合使用。这种工作方式既可带来机器人引导
VisionPro 3D
VisionPro® 3D 软件为棘手的组件验证 和机器人拾取应用提供了新的可能。
VisionPro 3D 可以提供精确、实时的三维定位信息,以自动化 方式实现组件验证、物流及机器人应用。配合任意数量的固定或 安装在机器人上的相机,VisionPro 3D 可以实现完全的应用灵 活性。以康耐视领先的 PatMax 和其它配套技术为依托,康耐 视 3D 已远非一般的普通 3D 机器视觉可比! VisionPro 3D 采用了 VisionPro 强大工具库中的多套二维功 能,包括 PatMax、PatFlex™ 及其它几何图案匹配工具。这些工 具容许不均匀照明,即便图案部分被盖住也能保持可靠性,因此 在最具挑战的设置和条件下也能确保精确的部件定位。 VisionPro 3D 可以部署在: 需要详细信息的单相机应用,而 2D 或 2.5D 方案无法满 足此类信息需求 安装在机器人上的单相机或立体相机引导系统 具有多个固定安装相机的工作单元,以免除机械固定之苦 与输送机线并行,用于跟踪和分选应用 VisionPro 3D 还可以结合其它康耐视视觉工具,如条码和 2D Data Matrix 读取、测量以及颜色检验。
VisionPro_工具说明_SJG
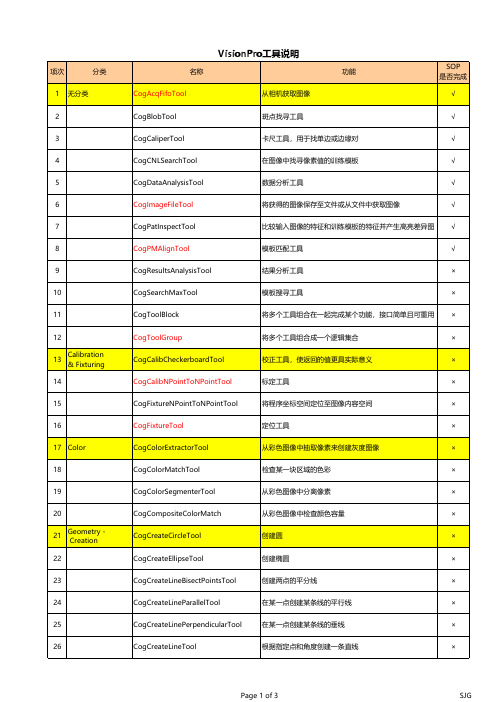
是否完成1无分类CogAcqFifoTool从相机获取图像√2CogBlobTool斑点找寻工具√3CogCaliperTool卡尺工具,用于找单边或边缘对√4CogCNLSearchTool在图像中找寻像素值的训练模板√5CogDataAnalysisTool数据分析工具√6CogImageFileTool将获得的图像保存至文件或从文件中获取图像√7CogPatInspectTool比较输入图像的特征和训练模板的特征并产生高亮差异图√8CogPMAlignTool模板匹配工具√9CogResultsAnalysisTool结果分析工具×10CogSearchMaxTool模板搜寻工具×11CogToolBlock将多个工具组合在一起完成某个功能,接口简单且可重用×12CogToolGroup将多个工具组合成一个逻辑集合×13Calibration& FixturingCogCalibCheckerboardTool校正工具,使返回的值更具实际意义×14CogCalibNPointToNPointTool标定工具×15CogFixtureNPointToNPointTool将程序坐标空间定位至图像内容空间×16CogFixtureTool定位工具×17Color CogColorExtractorTool从彩色图像中抽取像素来创建灰度图像×18CogColorMatchTool检查某一块区域的色彩×19CogColorSegmenterTool从彩色图像中分离像素×20CogCompositeColorMatch从彩色图像中检查颜色容量×21Geometry -CreationCogCreateCircleTool创建圆×22CogCreateEllipseTool创建椭圆×23CogCreateLineBisectPointsTool创建两点的平分线×24CogCreateLineParallelTool在某一点创建某条线的平行线×25CogCreateLinePerpendicularTool在某一点创建某条线的垂线×26CogCreateLineTool根据指定点和角度创建一条直线×是否完成27CogCreateSegmentAvgSegsTool创建两条线段的平均线×28CogCreateSegmentTool创建线段×29Geometry- Finding & FittingCogFindCircleTool找圆工具×30CogFindLineTool找线工具×31CogFitCircleTool拟合圆×32CogFitEllipseTool拟合椭圆×33CogFitLineTool拟合直线×34Geometry- IntersectionCogIntersectCircleCircleTool检测两圆是否相交×35CogIntersectLineCircleTool检测线与圆是否相交×36CogIntersectLineEllipseTool检测线与椭圆是否相交×37CogIntersectLineLineTool检测线线是否相交×38CogIntersectSegmentCircleTool检测线段与圆是否相交×39CogIntersectSegmentEllipseTool检测线段与椭圆是否相交×40CogIntersectSegmentLineTool检测线段与直线是否相交×41CogIntersectSegmentSegmentTool检测线段与线段是否相交×42Geometry- MeasurementCogAngleLineLineTool两条直线的夹角×43CogAnglePointPointTool由两点组成的线段的角度×44CogDistanceCircleCircleTool两圆的最短距离×45CogDistanceLineCircleTool线到圆的最短距离×46CogDistanceLineEllipseTool线到椭圆的最短距离×47CogDistancePointCircleTool点到圆的最短距离×48CogDistancePointEllipseTool点到椭圆的最短距离×49CogDistancePointLineTool点到直线的最短距离×50CogDistancePointPointTool点到点的距离×51CogDistancePointSegmentTool点到线段的最短距离×52CogDistanceSegmentCircleTool线段到圆的最短距离×是否完成53CogDistanceSegmentEllipseTool线段到椭圆的最短距离×54CogDistanceSegmentLineTool线段到线的最短距离×55CogDistanceSegmentSegmentTool线段到线段的最短距离×56ID& VerificationCog2DSymbolTool2维解码工具×57Cog2DSymbolVerifyTool2维解码验证工具×58CogBarcodeTool定位并解码工具×59CogOCVMaxTool确定字符串是否包含预期的字符×60CogOCVTool确定字符串、logo等是否存在于图像中×61CogPDF417Tool用于解码PDF417符号×62ImageProcessingCogAffineTransformTool通过仿射变换产生新的图像×63CogCopyRegionTool复制输入图像的一部分到输出图像×64CogHistogramTool对图像中的像素值进行统计测量×65CogImageAverageTool积累同一场景的不同图像并产生一个平均图像×66CogImageConvertTool将图像从一种格式转换为另一种格式ˇ67CogImageSharpnessTool用来判断图像的锐利度×68CogIPOneImageTool执行基本图像处理操作×69CogIPTwoImageAddTool由两个输入图像产生一个输出图像×70CogIPTwoImageMinMaxTool结合两个图像的像素最小值或最大值×71CogIPTwoImageSubtractTool两幅图像相减得到输出图像×72CogLinescanDistortionCorrectionTool从线扫相机获得图像×73CogPixelMapTool定义输入图像与输出图像之间的映射×74CogPolarUnwrapTool将输出图像部分转换为输出图像×75CogSobelEdgeTool用于分离或增强边界信息×。
2024年Cognex培训教程
Cognex培训教程引言:CognexCorporation是一家专注于机器视觉和工业自动化技术的公司,其产品广泛应用于制造业、物流、医疗等领域。
为了帮助用户更好地了解和应用Cognex的产品,本文将为您介绍Cognex培训教程的内容和结构。
第一部分:Cognex产品概述1.1Cognex产品线介绍Cognex的产品线涵盖了视觉系统、视觉软件、视觉传感器和工业读码器等多个领域。
其中,视觉系统包括In-Sight系列、DSMax 系列等,视觉软件包括VisionPro、InsightExplorer等,视觉传感器包括Dataman系列等。
1.2Cognex产品的应用领域Cognex的产品广泛应用于制造业、物流、医疗、电子、汽车等多个领域。
例如,在制造业中,Cognex的视觉系统可以用于检测产品的质量,确保产品的合格率;在物流领域,Cognex的读码器可以用于读取条码和二维码,提高物流效率。
第二部分:Cognex视觉系统培训2.1In-Sight视觉系统培训In-Sight系列是Cognex的视觉系统产品,包括In-Sight5000、In-Sight7000等型号。
本部分将介绍In-Sight视觉系统的硬件组成、软件配置和应用案例。
2.2DSMax视觉系统培训DSMax系列是Cognex的高端视觉系统产品,具有高性能、高稳定性等特点。
本部分将介绍DSMax视觉系统的硬件组成、软件配置和应用案例。
第三部分:Cognex视觉软件培训3.1VisionPro软件培训VisionPro是Cognex的视觉软件产品,具有强大的图像处理和分析能力。
本部分将介绍VisionPro软件的功能、操作方法和应用案例。
3.2InsightExplorer软件培训InsightExplorer是Cognex的视觉软件产品,用于配置和管理In-Sight视觉系统。
本部分将介绍InsightExplorer软件的功能、操作方法和应用案例。
【转帖保存】VisionPro工具名称和用途

【转帖保存】VisionPro⼯具名称和⽤途转的贴,保留存博⼀⽆分类1.1. CogAcqFifoTool功能:从相机获取图像1.2. CogBlobTool功能:斑点找寻⼯具1.3. CogCaliperTool功能:卡尺⼯具,⽤于找单边或边缘对1.4.CogCNLSearchTool功能:在图像中找寻像素值的训练模板,基于像素的匹配,分线性和⾮线性两种1.5. CogDataAnalysisTool功能:数据分析⼯具1.6. CogImageFileTool功能:将获得的图像保存⾄⽂件或从⽂件中获取图像1.7. CogPatInspectTool功能:⽐较输⼊图像的特征和训练模板的特征并产⽣⾼亮差异图1.8. CogPMAlignTool功能:模板匹配⼯具1.9. CogResultsAnalysisTool功能:结果分析⼯具1.10.CogSearchMaxTool功能:模板搜寻⼯具1.11. CogToolBlock功能:将多个⼯具组合在⼀起完成某个功能,接⼝简单且可重⽤1.12. CogToolGroup功能:将多个⼯具组合成⼀个逻辑集合⼆ Calibration & Fixturing2.1. CogCalibCheckerboardTool功能:校正棋盘格⼯具,使返回的值更具实际意义2.2. CogCalibNPointToNPointTool功能:标定⼯具,点对点的矫正2.3. CogFixtureNPointToNPointTool功能:将程序坐标空间定位⾄图像内容空间2.4.CogFixtureTool功能:定位⼯具三 Color3.1. CogColorExtractorTool功能:从彩⾊图像中抽取像素来创建灰度图像3.2. CogColorMatchTool功能:检查某⼀块区域的⾊彩3.3. CogColorSegmenterTool功能:从彩⾊图像中分离像素3.4.CogCompositeColorMatch功能:从彩⾊图像中检查颜⾊容量四 Geometry - Creation4.1. CogCreateCircleTool功能:创建圆4.2. CogCreateEllipseTool功能:创建椭圆4.3. CogCreateLineBisectPointsTool功能:创建两点之间的平分线4.4.CogCreateLineParallelTool功能:在某⼀点创建某条线的平⾏线4.5. CogCreateLinePerpendicularTool功能:在某⼀点创建某条线的垂线4.6. CogCreateLineTool功能:根据指定点和⾓度创建⼀条直线4.7. CogCreateSegmentAvgSegsTool功能:创建两条线段的平均线4.8.CogCreateSegmentTool功能:创建线段五 Geometry - Finding & Fitting5.1. CogFindCircleTool功能:找圆⼯具5.2. CogFindLineTool功能:找线⼯具5.3. CogFitCircleTool功能:拟合圆5.4.CogFitEllipseTool功能:拟合椭圆,把测量卡⼝扣住待拟合的部分就好了5.5. CogFitLineTool功能:拟合直线六 Geometry - Intersection6.1. CogIntersectCircleCircleTool功能:检测两圆是否相交6.2. CogIntersectLineCircleTool功能:检测线与圆是否相交6.3. CogIntersectLineEllipseTool功能:检测线与椭圆是否相交6.4. CogIntersectLineLineTool功能:检测线与线是否相交6.5. CogIntersectSegmentCircleTool功能:检测线段与是否相交6.6. CogIntersectSegmentEllipseTool功能:检测线段与椭圆是否相交6.7. CogIntersectSegmentLineTool功能:检测线段与线是否相交6.8.CogIntersectSegmentSegmentTool功能:检测线段与线段是否相交七 Geometry - Measurement7.1. CogAngleLineLineTool功能:两条直线的夹⾓,选择两条直线的定位7.2. CogAnglePointPointTool功能:由两点组成的线段的⾓度7.3. CogDistanceCircleCircleTool功能:两圆的最短距离7.4. CogDistanceLineCircleTool功能:线到圆的最短距离7.5. CogDistanceLineEllipseTool功能:线到椭圆的最短距离7.6. CogDistancePointCircleTool功能:点到圆的最短距离7.7. CogDistancePointEllipseTool功能:点到椭圆的最短距离7.8.CogDistancePointLineTool功能:点到线的最短距离7.9. CogDistancePointPointTool功能:点到点的最短距离7.10.CogDistancePointSegmentTool功能:点到线段的最短距离7.11. CogDistanceSegmentCircleTool功能:线段到圆的最短距离7.12. CogDistanceSegmentEllipseTool功能:线段到椭圆的最短距离7.13. CogDistanceSegmentLineTool功能:线段到线的最短距离7.14. CogDistanceSegmentSegmentTool功能:线段到线段的最短距离⼋ ID & Verification8.1. Cog2DSymbolTool功能:2维解码⼯具8.2. Cog2DSymbolVerifyTool功能:2维解码验证⼯具8.3. CogBarcodeTool功能:定位并解码⼯具8.4. CogOCVMaxTool功能:确定字符串是否包含预期的字符8.5. CogOCVTool功能:确定字符串、logo等是否存在于图像中8.6. CogPDF417Tool功能:⽤于解码PDF417符号8.7.CogIDTool功能:识别⼆维码条形码九 Geometry - Measurement9.1. CogAffineTransformTool功能:通过仿射变换产⽣新的图像9.2. CogCopyRegionTool功能:复制输⼊图像的⼀部分到输出图像9.3. CogHistogramTool功能:对图像中的像素值进⾏统计测量9.4. CogImageAverageTool功能:积累同⼀场景的不同图像并产⽣⼀个平均图像9.5. CogImageConvertTool功能:将图像从⼀种格式转换为另⼀种格式9.6. CogImageSharpnessTool功能:⽤来判断图像的锐利度9.7.CogIPOneImageTool功能:执⾏基本图像处理操作9.8. CogIPTwoImageAddTool功能:由两个输⼊图像产⽣⼀个输出图像9.9.CogIPTwoImageMinMaxTool功能:结合两个图像的像素最⼩值或最⼤值9.10. CogIPTwoImageSubtractTool功能:两幅图像相减得到输出图像9.11. CogLinescanDistortionCorrectionTool功能:从线扫相机获得图像9.12. CogPixelMapTool功能:定义输⼊图像与输出图像之间的映射9.13. CogPolarUnwrapTool功能:将输出图像部分转换为输出图像9.14. CogSobelEdgeTool功能:⽤于分离或增强边界信息看了感觉怎么样?来说说吧。
CognexVisionPro软件简介及其目标识别定位功能
Cognex VisionPro 软件简介及其目标识别定位功能1、VisionPro主要功能:图像预处理、图像拼接、图像标定、几何校正、定位、OCV\ID、图像几何测量、结果分析等,该软件可以直接和国际大多数相机相连,包括模拟、1394、千兆网相机等,且可以直接输出检测结果,提供二次开发接口、支持点net。
在其QuickBuild环境中无需任何代码编程,只需拖拉操作就可以完成检查文件的设置,检测结果输出,可进行快速开发。
QuickBuild能与用户自己编写的点net程序无缝连接,实现数据共享,用户可以使用自己的I/O板。
2、VisionPro软件与Halcon对比:开发方式:VIsionPro可以拖拉式图形编程,非常形象,同时也可以使用API 函数编程,增加灵活性。
VisionPro的QuickBuild提供更加高效快速的编程界面,能够迅速融合到用户程序中。
QuickBuild提供许多成熟的视觉检测工具和设置界面,使用QuickBuild做评估测试和开发的效率远高于Halcon的Hdevelop。
而Halcon只能用函数编程,没有图形编程界面,开发效率低于VisonPro。
视觉工具和函数:VisonPro的PatMax定位工具和颜色识别工具优于Halcon的类似工具。
特别是PatMax定位工具可在图像模糊、对比度低、目标形变严重的情况下实现更稳定的定位和目标识别功能,得到了行业广泛的认可。
支持的相机:两种开发软件都支持大多数相机,都可以编写自定义的驱动。
编写自定义驱动,Halcon提供更好的接口。
Cognex VisionPro软件的测试版可在.cognex.下载VisionPro定位工具简介:安装完VisionPro后,有很多演示例程可以运行,且可以进行图像仿真。
以下是其中的一小部分以及我们客户中使用到的一些。
存在透视形变情况下的定位与高度识别PatMax定位识别功能演示,形变、模糊、强干扰都不受影响晶元定位强干扰图像定位对多目标在各种对比度情况下的稳定定位严重缺失情况下的定位强干扰下的OCV。
VisionPro系统快速开发强大的应用系统
VisionPro 系统,快速开发强大的应用系统Cognex ® VisionPro ® 系统组合了世界一流的机器视觉技术,具有快速而强大的应用系统开发能力。
VisionPro QuickStart ™利用拖放工具,以加速应用原型的开发。
这一成果在应用开发的整个周期内都可应用。
通过使用基于COM/ActiveX 的VisionPro 机器视觉工具和Visual Basic ® 、Visual C++ ® 等图形化编程环境,开发应用系统。
与MVS-8100 ™系列图像采集卡相配合,VisionPro 使得制造商、系统集成商、工程师可以快速开发和配置出强大的机器视觉应用系统。
快速建立原型和易于集成VisionPro 的两层软件结构便于建立原型和集成。
交互层利用拖放工具和ActiveX 控件以加速应用系统的开发;在程序层,将原型应用开发成用户解决方案。
基于COM/ActiveX 技术使VisionPro 应用系统易于集成第三方实用程序(例如图形函数),而且为整个机器(例如I/O 、机器人控制、工厂通信)提供了基于COM 控件应用的易于集成性。
先进的机器视觉软件Cognex 的视觉工具库提供了用于测量、检测、制导和识别的视觉软件程序组。
即使是在最具挑战性的视觉应用中,这些工具也被证实具有高可靠性。
硬件灵活性VisionPro 的用户可在较大范围内选择MVS-8100 系列图像采集卡,以开发视觉应用。
经VisionPro 软件测试和证明,这些图像采集卡为主机提供了用于图像处理和显示的高速图像转移,以获得快速的视觉应用操作。
多相机输入、高速度及对高分辨率相机的支持提高了VisionPro 系统的采集灵活性。
技术优势•快速开发强大的基于PC 的视觉应用•简化视觉系统与其他主控制程序的融合处理•兼容多种Cognex MVS-8100 系列图像采集卡•通过QuickStart 拖放工具加速原型应用•配合视觉工具库,以获得高性能VisionPro 的软件结构VisionPro 提供了易于应用的原型、发展和应用。
VisionPro 系统,快速开发强大的应用系统.doc
VisionPro 系统,快速开发强大的应用系统Cognex ® VisionPro ® 系统组合了世界一流的机器视觉技术,具有快速而强大的应用系统开发能力。
VisionPro QuickStart ™利用拖放工具,以加速应用原型的开发。
这一成果在应用开发的整个周期内都可应用。
通过使用基于COM/ActiveX 的VisionPro 机器视觉工具和Visual Basic ® 、Visual C++ ® 等图形化编程环境,开发应用系统。
与MVS-8100 ™系列图像采集卡相配合,VisionPro 使得制造商、系统集成商、工程师可以快速开发和配置出强大的机器视觉应用系统。
快速建立原型和易于集成VisionPro 的两层软件结构便于建立原型和集成。
交互层利用拖放工具和ActiveX 控件以加速应用系统的开发;在程序层,将原型应用开发成用户解决方案。
基于COM/ActiveX 技术使VisionPro 应用系统易于集成第三方实用程序(例如图形函数),而且为整个机器(例如I/O 、机器人控制、工厂通信)提供了基于COM 控件应用的易于集成性。
先进的机器视觉软件Cognex 的视觉工具库提供了用于测量、检测、制导和识别的视觉软件程序组。
即使是在最具挑战性的视觉应用中,这些工具也被证实具有高可靠性。
硬件灵活性VisionPro 的用户可在较大范围内选择MVS-8100 系列图像采集卡,以开发视觉应用。
经VisionPro 软件测试和证明,这些图像采集卡为主机提供了用于图像处理和显示的高速图像转移,以获得快速的视觉应用操作。
多相机输入、高速度及对高分辨率相机的支持提高了VisionPro 系统的采集灵活性。
技术优势•快速开发强大的基于PC 的视觉应用•简化视觉系统与其他主控制程序的融合处理•兼容多种Cognex MVS-8100 系列图像采集卡•通过QuickStart 拖放工具加速原型应用•配合视觉工具库,以获得高性能VisionPro 的软件结构VisionPro 提供了易于应用的原型、发展和应用。
康耐视VisionPro软件操作手册V

广州三拓识别技术有限公司GUANGZHOU SANTUO INDETIFCATION TECH.CO.,LTD.康耐视VisionPro操作手册V1.02013522‐‐•设置IP地址•获取图像•图像定位•条码检测•结果输出(超级终端)设置IP地址1,手动配置电脑网卡的IP地址。
如下图:2,从开始菜单/Cognex菜单下打开GigE Vision Configuration Tool.VisionPro以太网相机IP地址配置软件3,配置相机的IP地址与电脑对应网卡的IP地址为同一个网段。
获取图像1,启动VisionPro主程序2,双击image Source (图像来源) 打开设置对话框。
3,选择“照相机”。
并从相机列表里选择对应的相机。
然后视频格式选择“Mono”。
注明:Mono表示黑白图像。
4,点击“初始化取相”,修改曝光时间为0.5ms.取消时限前面的勾。
说明:”时限”即取图像超时。
表示执行了取图像的命令,但在设定时间内没有获取到图像。
多在外部触发模式时,等待外部电眼等触发信号时间过长而报错。
5,点击左Image Source 窗口左上角的相机符号,即显示实时画面。
在画面上点击右键来缩放图像等。
6,若需要设置为外部电眼触发。
可切换到“闪光灯和触发器”页面。
选择“硬件自动”选项。
图像定位1,选择“作业编辑器”窗口。
点击左上角的“单次运行作业”按钮。
获取一张图像。
2,从窗口工具栏的“显示VisionPro工具”打开工具窗口。
里面为此软件的检测算法。
3,定位图像设置步骤。
首先从工具窗口拖动CogPMAlignTool和CogFixtureTool到作业编辑器。
并按住鼠标左键对这两个工具进行连线编程。
如下图。
4,双击CogPMAlignTool1,在弹出的窗口对其参数进行设置。
首先点击“抓取训练图像”按钮。
“训练图像”表示一张标准的图像。
若相机现在拍的图像不是很理想,则重新执行拍照动作后再点击此按钮。
VisionPro功能介绍15_1_Graphics-CN

学习目标
学员将学会正确地:
创建、控制并且清楚显示区上的静态和交互性图形 渲染适当坐标空间中的图形 创建图形集和复合形状,包括工具结果图形
1
图形
• VisionPro中的图形可能是
– 静态的
• 图形一旦显示了就不会有更新
– 交互的
• 用户可以选择并操纵图形 • 图形属性可以在代码中修改并自动更新
1
交互图形
• 下一步,设置形状的属性: Circ.Color = CogColorConstants.Magenta Circ.SetCenterRadius(300, 300, 200) Circ.LineStyle = CogGraphicLineStyleConstants.Dash
1
交互图形
CogDisplay1.StaticGraphics.Add(Rect, "group")
• 显示区维持两个图形列表:
– 静态图形列表用于绘制不会改变的图形 – 交互图形列表用于绘制用户可以操纵或者将会改变的图形
1
交互图形
• 交互形状创建的方法与静态形状一样: Private Circ As CogCircle Circ = New CogCircle
• 要使用组合形状作为一个图形体,使用复合形状 (CogCompositeShape 类)
1
静态图形
• 创建形状: Private Rect As CogRectangle Rect = New CogRectangle
1
静态图形
• 为形状设置适当的属性 • 不同形状的属性也不同,最常用的例子如下:
Rect.Color = CogColorConstants.Blue Rect.SetXYWidthHeight(100, 200, 100, 50) Rect.LineStyle = CogGraphicLineStyleConstants.DashDot
VisionProCogPMAlignTool使用详解
VisionProCogPMAlignTool使⽤详解
CogPMAlignTool简述
CogPMAlignTool是⼀个模型定位⼯具,与其他⼀些模型定位算法⼀样,⾸先训练⼀个模型,然后再运⾏时图像上查询⼀个或多个已训练的模型,但是CogPMAlignTool不是基于像素栅格,基于像素栅格的算法在⼀些旋转和尺⼨变化的情况时达不到有效的精度。
它是基于特征的,在模型匹配中更加快速和准确。
主要参数
CogPMAlignTool有三种算法可选,PatQuick、PatMax、PatFlex,其特点分别如下:
1)PatQuick:此算法速度最快,对于3维或者低质量元件效果更佳,能承受更多的图像差异;
2)PatFlex:为⾼灵敏度的图案设计,在弯曲不平的表⾯表现跟佳,灵活但不够精确。
模型区域:模型区域就是利⽤来作为模型特征的区域;
模型原点:模型原点就是⽤来在模型中得到的点,⼀般选择中⼼原点;
极性:极性表⽰特征边界点是从⿊到⽩还是从⽩到⿊,忽略极性可以增加模型的多样性;
弹性:弹性是⼀个运⾏时参数,代表能承受⾮线性变化的程度;
粒度:粒度代表探测模型精细特征的程度。
康耐视VisionPro软件提供更多图像采集选择
康耐视VisionPro软件提供更多图像采集选择
无
【期刊名称】《自动化信息》
【年(卷),期】2009(000)011
【摘要】康耐视公司近期宣布推出VisionPro系列新产品。
VisonPro是一款独立于硬件设备的视觉软件,在市场上有很高的认可度。
VisionPro6.0的图像采集功能被进一步强化,能支持更大的相机图像以及如3D廓线仪、红外热像仪和X光片等高科技非传统来源转换的图像,从而提供了更多的图像采集选择。
【总页数】1页(P13)
【作者】无
【作者单位】无
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.康耐视VisionPro7.0机器视觉软件引入Inspection Designer [J],
2.康耐视VisionPro软件提供更多图像采集选择 [J],
3.康耐视扩展了VISIONPRO SURFACE检测软件功能 [J],
4.康耐视VisionPro软件提供更多图像采集选择 [J],
5.康耐视VisionPro Surface检测软件2.1版 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Cognex VisionPro 软件简介及其目标识别定位功能
1、VisionPro主要功能:图像预处理、图像拼接、图像标定、几何校
正、定位、OCV\ID、图像几何测量、结果分析等,该软件可以直接和国际大多数相机相连,包括模拟、1394、千兆网相机等,且可以直接输出检测结果,提供二次开发接口、支持点net。
在其QuickBuild环境中无需任何代码编程,只需拖拉操作就可以完成检查文件的设置,检测结果输出,可进行快速开发。
QuickBuild能与用户自己编写的点net程序无缝连接,实现数据共享,用户可以使用自己的I/O板。
2、VisionPro软件与Halcon对比:
开发方式:VIsionPro可以拖拉式图形编程,非常形象,同时也可以使用API函数编程,增加灵活性。
VisionPro的QuickBuild提供更加高效快速的编程界面,能够迅速融合到用户程序中。
QuickBuild提供许多成熟的视觉检测工具和设置界面,使用QuickBuild做评估测试和开发的效率远高于Halcon的Hdevelop。
而Halcon只能用函数编程,没有图形编程界面,开发效率低于VisonPro。
视觉工具和函数:VisonPro的PatMax定位工具和颜色识别工具优于Halcon的类似工具。
特别是PatMax定位工具可在图像模糊、对比度低、目标形变严重的情况下实现更稳定的定位和目标识别功能,得到了行业内广泛的认可。
支持的相机:两种开发软件都支持大多数相机,都可以编写自定义的
驱动。
编写自定义驱动,Halcon提供更好的接口。
Cognex VisionPro软件的测试版可在下载
VisionPro定位工具简介:
安装完VisionPro后,有很多演示例程可以运行,且可以进行图像仿真。
以下是其中的一小部分以及我们客户中使用到的一些。
存在透视形变情况下的定位与高度识别
PatMax定位识别功能演示,形变、模糊、强干扰都不受影响
晶元定位
强干扰图像定位
对多目标在各种对比度情况下的稳定定位
严重缺失情况下的定位
强干扰下的OCV。