Trio简易入门手册
Tricaster_300简易使用手册
使用指南目录1、主机接口 (3)2、面板介绍 (5)3、启动界面 (6)3.1开机后,进入启动界面。
(6)3.2打开项目 (7)3.3新建项目 (8)3.4虚拟场景编辑 (10)3.5项目管理 (10)4、系统主界面 (11)4.1视频源预监面板 (11)4.2切换面板 (13)4.3素材和控制区 (13)4.4 虚拟 (14)4.5字幕 (15)4.6图片/音频 (16)4.7调音台 (17)5.预览和输出面板 (17)5.1硬盘录像 (18)5.2网络流媒体 (19)15.3图片抓取 (21)6.特效控制面板 (22)7.下游键 (22)2Tricaster 使用指南1、主机接口视频输入能够支持3路外部视频HD/SD 同时连接:分量,或复合(分量的Y接同时具有符合输入功能)。
视频输出取决于所选择的工程。
当选择HD工程时,可以同时输出 2路HD视频和 1路SD视频;当选择SD工程时,可以选择3路视频输出,每一路都可以是SDI,分量或者S-Video+分量输出,总共实现6路或者9路同时输出。
后面板的DVI输出接口能够输出节目流到DVI投影仪,显示器,液晶电视等,最高可以输出1900*1200分辨率。
3452、面板介绍(机箱前面板)6(机箱后面板)3、启动界面3.1开机后,进入启动界面。
启动画面,主要由一个图标环组成。
在这里我们可以完成新建任务、关闭系统、打开项目、剪辑素材等操作。
73.2打开项目点击打开项目图标后,会看到最近使用的项目列表。
83.3新建项目选择您的本地视频标准(标准的多模式,选择NTSC ,PAL 或NTSC-J )和会话1080i 的格式,720P ,480/30i (16:9)或480/30i (4:3)。
9选择你要存放视频的目录,保存的项目名称视频格式。
103.4虚拟场景编辑通过虚拟场景编辑功能,可对内置的虚拟场景进行任意修改。
3.5项目管理可对本地的视频进行管理。
114、系统主界面4.1视频源预监面板 (1)视频源调整视频源预监窗口 切换面视频预监窗口素材和控制面板调音台特效控制区可调节高标清复合、分量输入,也可对视频的亮度、对比度、色度以及饱和度进行调节。
trio(翠欧) euro205(x)中文手册9程序举例1.
第9章程序举例目录目录 .......................................................................................................................................... 9-2 程序举例....................................................................................................................................... 9-3 例1-从触摸键盘获得一个整数值 ...................................................................................... 9-3 例2-从触摸键盘获得一个真实值 ...................................................................................... 9-3 例3-ATM卡产品................................................................................................................. 9-4 例4-2轴选位系统 ............................................................................................................... 9-7 例5用寄存器旋转打印针头............................................................................................. 9-10 例6程序共享数据 ............................................................................................................ 9-12 例7控制轴错误 ................................................................................................................ 9-12程序举例例1-从触摸键盘获得一个整数值子程序“getnum”从键盘获得变量“数”形式的整数值。
翠欧控制卡入门手册-MC206X-学习

目的 (2)原则 (2)内容 (2)1 用途 (2)1.1 应用领域 (2)1.2 应用实例 (3)2 运动控制系统构架 (3)2.1 组成 (3)2.2 各部分功能 (4)3 配线 (6)3.1 MC206X介绍 (6)3.2 供电 (9)3.3 控制器、驱动器配线 (9)3.4 孔制器、上位机连接 (12)4 软件编程 (12)4.1 支持软件使用 (12)4.2 简单运动指令举例 (27)4.3 简单运动控制程序举例 (34)目的通过阅读本手册,让刚刚接触TRIO运动控制器的客户可以从用途、系统构架、TRIO 在系统中的作用以及软、硬件有一个初步的了解。
其中最主要的是,通过本手册一定要让用户能够自己搭建一个简单的控制系统,能用Motion Perfet与控制器、电机连接起来,对电机进行一些简单的操作。
为用户未来使用TRIO运动控制器开发项目打下基础。
原则简单、实用、图文并茂。
内容1 用途1.1 应用领域TRIO运动控制器主要应用在工业控制领域,可以对伺服,步进,变频器等进行控制。
其特点是指令简单,完成复杂的多轴协调运动,只需几条简单的指令就可以完成。
1.2 应用实例2 运动控制系统构架2.1 组成2.1.1 运动控制系统概念运动控制是指在一定的环境中,根据给定的条件,将预定的控制方案、规划指令转变成期望的机械运动。
实现对被控目标机械部件精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些控制的综合控制。
当今的运动控制,由于环境条件的复杂,使得控制方案,数据也显得越来越复杂,这样,实际中要想完成预定的动作,实现准确的运动控制,更多的依靠大型的运动控制系统。
运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控制器提供运动输出的放大器、执行机构、反馈系统(传感器/变送器),可基于输出和输入的比较值,调节过程变量。
有的系统还包括操作员界面或主机终端前端处理设备。
2.1.2 运动控制系统框图2.2 各部分功能➢人机交互:一般由上位机或触摸屏完成人机交互功能。
Trio控制器快速选型及使用
5)TRIO提供CAD 的图形转化软件,可以把从AUTOCAD或者其他的绘 图软件绘制的二维图形直接转化成运动执行命令,用户只需要根据加 工的工艺要求简单的添加几个相关的运动命令就可以执行程序。 6)TRIO产品具有直线插补、圆弧插补、螺旋线插补、轮廓控制、速度 时时调整、电子齿轮、电子凸轮、虚拟轴控制、仿真功能、 7)TRIO产品提供了专门应用于电子凸轮的软件,里面有常用的几种电 子凸轮的图形,可以利用这些图形直接得到加工凸轮表的函数值或者 其曲线的函数公式,也可以根据自己的加工数据编写加工的凸轮曲线 8) TRIO产品还提供了Active X控件,用户可以根据设备加工工艺的要求利 用VB/VC/C++等高级语言进行二次开发,实现各种各样的要求.
250us 4路隔离的16-bit 0~±10V 2MHz 500KHz
250us 16路隔离的16bit 0~±10V 2MHz 500KHz
250us 8路隔离的16-bit 0~±10V 2MHz 500KHz
编码器最大接收 脉冲 最多编码器通道
6MHz
6MHz
6MHz
6MHz
6MHz
2
5
6
继电器常开触 点, DC24V,. 250mA
电源输入
DC24~29V, 150mA
DC5V,500mA(±1 2V,25mA是在采用 模拟电压输出时 需要增加)
DC24~29V, 600mA
DC24~29V, 450mA
计算机的PCI总 线供电
数字输入
4 路光隔,可扩 展到256 I/O
16 路光隔,可扩 展到256 I/O
32-bit的位置计 数 32-bit,速度可实 时调整,速度迭 加 32M的内 存,128K的PCI 总线的双端口 RAM(双FIFO)
AquaTrio 无线 AquaTrio 无线 7000 指南说明书

AquaTrio Cordless 7000English5 Important safety informationRead this important information carefully before you use the appliance and its accessories and save it for future reference. The accessories supplied may vary for different products.Danger-Never vacuum up flammable substances, and do not vacuum up ashes until they are cold.-Never immerse the appliance or the adapter in water or any other liquid, nor rinse it under the tap.Warning-Check if the voltage indicated on the adapter corresponds to the local mains voltage before you connect the appliance.-Always check the appliance before you use it. Do not use the appliance or the adapter if it is damaged.Always replace a damaged part with one of the original type.-The adapter contains a transformer. Do not cut off the adapter to replace it with another plug, as this causes a hazardous situation.-Philips has only tested this appliance with XV1792 Philips Floor Cleaner. Add a maximum of 15 ml to the clean water tank. Other detergents may lead to excessive foaming, which reduces performance and may cause the appliance to malfunction. XV1792 Philips Floor Cleaner is available in selected markets. When using any other suitable liquid floor cleaner, add a maximum of 15 ml to the clean water tank.-This appliance is not intended for use by persons (including children) with reduced physical, sensory or mental capabilities, or lack of experience and knowledge, unless they have been given supervision or instruction concerning use of the appliance by a person responsible for their safety.-Children should be supervised to ensure that they do not play with the appliance.-The plug must be removed from the socket-outlet before cleaning or maintaining the appliance.-Unplug the adapter if you are not going to use the appliance for some time.-When storing the appliance for more than a month (without usage or charging), make sure that the battery is charged to at least 50%. Storing the appliance with an empty battery may lead to irreversible damage to the battery.-Do not let the motorized nozzle move over the mains cords of other appliances or other cables as this may cause a hazard.-Keep loose clothing, hair and body parts away from the motorized brushes.-Do not cover or block the ventilation openings when the appliance is operating.-Take the appliance to an authorized Philips service center when you can no longer recharge it or when it runs out of power quickly.-If the appliance is damaged, do not try to charge it.-This appliance is designed for household use only. Do not use this appliance to vacuum up building waste, cement dust, ashes, fine sand, lime and similar substances. Always clean all parts of the appliance as shown in the user manual. Do not clean any parts with water and/or cleaning agents if this is not specifically shown in the user manual.-This product contains a rechargeable battery. The battery may only be replaced by a qualified service engineer.Caution-Do not hold the appliance upside down as this will cause water to leak through the air openings of the appliance. If this does happen, the appliance can still function safely.-During charging, the adapter becomes warm to the touch. This is normal.-Do not plug in, unplug or operate the appliance with wet hands.6English-Do not unplug the appliance by pulling at the cord. Always unplug by pulling the small plug out of the appliance and the adapter out of the wall socket (Fig. 1).-Always switch off the appliance after use and before you charge it.-Never block the exhaust air openings at the back of the appliance during use.-Do not clean the removable parts of the appliance in the dishwasher. These parts are not dishwasher-proof.-Never use any accessories or parts from other manufacturers or that Philips does not specifically recommend. If you use such accessories or parts, your warranty becomes invalid.-Make sure that the appliance is installed with the after-clean and storage station assembled according to the instructions in the user manual.-In rare cases, when the appliance performs the AUTOCLEAN cycle, it may happen that the appliance suddenly stops working in an environment with electrostatic discharge. In this case you can restart the AUTOCLEAN function by pressing the AUTOCLEAN button (Fig. 2). It might be necessary to press the on/off button first. This will activate the display.-As this appliance uses water to clean, the floor may remain wet and slippery for a while (Fig. 3).-Do not leave the appliance unattended when the AquaSpin nozzle is unlocked or when the appliance is switched on.Battery safety instructions-Only use this product for its intended purpose and follow the general and battery safety instructions as described in this user manual. Any misuse can cause electric shock, burns, fire and other hazards or injuries.-Warning: Only charge the appliance with the adapter supplied. Only use 34V adapter S036-1A340100HE. The corresponding adapter number can be found on the adapter.-Charge, use and store the product at a temperature between 5 °C and 35 °C.-Do not expose the device to direct sunlight or to high temperatures (near hot stoves, in microwave ovens or on induction cookers). Batteries may explode if overheated.-If the product becomes abnormally hot or smelly, changes color or if charging takes longer than usual, stop using and charging the product and contact Philips.-Do not place products and their batteries in microwave ovens or on induction cookers.-When you handle batteries, make sure that your hands, the product and the batteries are dry.-To prevent batteries from heating up or releasing toxic or hazardous substances, do not modify, pierce or damage products and batteries and do not disassemble, short-circuit, overcharge or reverse charge batteries.-To avoid accidental short-circuiting of batteries after removal, do not let battery terminals come into contact with metal objects (e.g. coins, hairpins, rings). Do not wrap batteries in aluminum foil. Tape battery terminals or put batteries in a plastic bag before you discard them.-If batteries are damaged or leaking, avoid contact with the skin or eyes. If this occurs, immediately rinse well with water and seek medical care.Removal of built-in rechargeable batteryRemove the rechargeable battery before discarding the appliance. If the battery is removed by a third party, this can only be done by a qualified service engineer. Before removing the battery, make sure that the appliance is disconnected from the wall socket and that the battery is completely empty.English71Disconnect the appliance from the wall socket and let it run until the motor stops.2Remove the grip handle (Fig. 5), clean water tank and dirty water tank from the appliance.3Remove the six screws from the back of the main body (Fig. 6).4Pull the front and back cover from the main body (Fig. 7).5Remove the three cover screws from the right side of the main body and remove the battery cover (Fig.8).6Disconnect all four connectors from the printed circuit board (Fig. 9).7Remove the battery from the appliance and dispose of it according to the rules (Fig. 10). Electromagnetic fields (EMF)This appliance complies with the applicable standards and regulations regarding exposure to electromagnetic fields.Ordering accessoriesTo buy accessories or spare parts, visit /parts-and-accessories or go to your Philips dealer. You can also contact the Philips Consumer Care Center in your country.Warranty and supportVersuni offers a two-year warranty after purchase on this product. This warranty is not valid if a defect is due to incorrect use or poor maintenance. Our warranty does not affect your rights under law as a consumer. For more information or for invoking the warranty, please visit our website /support.Recycling-This symbol means that electrical products and batteries shall not be disposed of with normal household waste (Fig. 4).-Follow your country’s rules for the separate collection of electrical products and batteries.8简体中文重要安全信息使用本产品及其附件之前,请仔细阅读本重要信息,并妥善保管以供日后参考。
Trio运动控制卡特性及功能说明
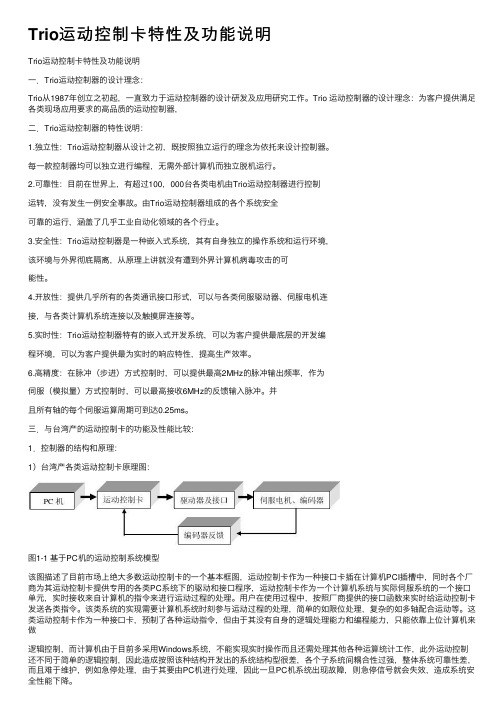
Trio运动控制卡特性及功能说明Trio运动控制卡特性及功能说明⼀.Trio运动控制器的设计理念:Trio从1987年创⽴之初起,⼀直致⼒于运动控制器的设计研发及应⽤研究⼯作。
Trio 运动控制器的设计理念:为客户提供满⾜各类现场应⽤要求的⾼品质的运动控制器,⼆.Trio运动控制器的特性说明:1.独⽴性:Trio运动控制器从设计之初,既按照独⽴运⾏的理念为依托来设计控制器。
每⼀款控制器均可以独⽴进⾏编程,⽆需外部计算机⽽独⽴脱机运⾏。
2.可靠性:⽬前在世界上,有超过100,000台各类电机由Trio运动控制器进⾏控制运转,没有发⽣⼀例安全事故。
由Trio运动控制器组成的各个系统安全可靠的运⾏,涵盖了⼏乎⼯业⾃动化领域的各个⾏业。
3.安全性:Trio运动控制器是⼀种嵌⼊式系统,其有⾃⾝独⽴的操作系统和运⾏环境,该环境与外界彻底隔离,从原理上讲就没有遭到外界计算机病毒攻击的可能性。
4.开放性:提供⼏乎所有的各类通讯接⼝形式,可以与各类伺服驱动器、伺服电机连接,与各类计算机系统连接以及触摸屏连接等。
5.实时性:Trio运动控制器特有的嵌⼊式开发系统,可以为客户提供最底层的开发编程环境,可以为客户提供最为实时的响应特性,提⾼⽣产效率。
6.⾼精度:在脉冲(步进)⽅式控制时,可以提供最⾼2MHz的脉冲输出频率,作为伺服(模拟量)⽅式控制时,可以最⾼接收6MHz的反馈输⼊脉冲。
并且所有轴的每个伺服运算周期可到达0.25ms。
三.与台湾产的运动控制卡的功能及性能⽐较:1.控制器的结构和原理:1)台湾产各类运动控制卡原理图:图1-1 基于PC机的运动控制系统模型该图描述了⽬前市场上绝⼤多数运动控制卡的⼀个基本框图,运动控制卡作为⼀种接⼝卡插在计算机PCI插槽中,同时各个⼚商为其运动控制卡提供专⽤的各类PC系统下的驱动和接⼝程序,运动控制卡作为⼀个计算机系统与实际伺服系统的⼀个接⼝单元,实时接收来⾃计算机的指令来进⾏运动过程的处理。
三坐标测量仪培训手册
三坐标讲义第一节课学前知识一.三坐标概况1.三坐标组成三坐标主要由以下几部分组成:测量机主机,控制系统,计算机(测量软件),测座、测头系统。
2.测量机主机这是测量机的基本硬件,有多种结构形式:移动桥式:活动桥式测量机是使用最为广泛的一种机构形式。
特点是开敞性比较好,视野开阔,上下零件方便.运动速度快,精度比较高。
有小型、中型、大型几种形式。
固定桥式:固定桥式测量机由于桥架固定,刚性好,动台中心驱动、中心光栅阿贝误差小,以上特点使这种结构的测量机精度非常高,是高精度和超高精度的测量机的首选结构.高架桥式:高架桥式测量机适合于大型和超大型测量机,适合于航空、航天、造船行业的大型零件或大型模具的测量。
一般都采用双光栅、双驱动等技术,提高精度。
水平臂式: 水平臂式测量机开敞性好,测量范围大,可以由两台机器共同组成双臂测量机,尤其适合汽车工业钣金件的测量。
关节臂式:关节臂式测量机具有非常好的灵活性,适合携带到现场进行测量,对环境条件要求比较低。
各种结构三坐标“图”以活动桥式测量机为例,介绍三坐标主要组成及功能:工作台(一般采用花岗石),用于摆放零件支撑桥架; 工作台放置零件时,一般要根据零件的形状和检测要求,选择适合的夹具或支撑。
要求零件固定要可靠,不使零件受外力变形或其位置发生变化。
大零件可在工作台上垫等高块,小零件可以放在固定在工作台上的方箱上固定后测量。
桥架,支撑 Z 滑架,形成互相垂直的三轴; 桥架是测量机的重要组成部分,由主、附腿和横梁、滑架等组成。
桥架的驱动部分和光栅基本都在主腿一侧,附腿主要起辅助支撑的作用。
由于这个原因,一般桥式测量机的横梁长度不超过 2。
5 米,超过这个长度就要使用双光栅等措施对附腿滞后的误差进行补偿,或采用其他机构形式。
滑架,使横梁与有平衡装置的 Z 轴连接;滑架连接横梁和 Z 轴,其上有两轴的全部气浮块和光栅的读数头、分气座。
气浮块和读数头的调整比较复杂,直接影响测量机精度,不允许调整。
trio入门手册

目的.............................................. 错误!未定义书签。
原则.............................................. 错误!未定义书签。
内容.............................................. 错误!未定义书签。
1 用途 ........................................ 错误!未定义书签。
应用领域.................................. 错误!未定义书签。
应用实例.................................. 错误!未定义书签。
2 运动控制系统构架 ............................ 错误!未定义书签。
组成...................................... 错误!未定义书签。
各部分功能................................ 错误!未定义书签。
3 配线 ........................................ 错误!未定义书签。
MC206X介绍................................ 错误!未定义书签。
供电...................................... 错误!未定义书签。
控制器、驱动器配线........................ 错误!未定义书签。
孔制器、上位机连接........................ 错误!未定义书签。
4 软件编程 .................................... 错误!未定义书签。
支持软件使用.............................. 错误!未定义书签。
图解三阶盲拧入门级教程_逐块消灭法(One by One)

对角装卸时,1、2 位棱,不断交 换,但只要公式 4 的使用次数为 偶数次时,1、2 位棱的初始位置 不变。
在 3 位加工时,1 位的棱也 不断原地打转,但只要其它 11 个棱正确,这个棱也就是 正确的。
对棱装卸时,1、2 位角不断交换, 但只要公式 4 的使用次数为偶数 次时,1、2 位角的初始位置不变。
使棱在加工厂翻转
公式 4
R U’ L’ U R’ U2 L U’ L’ U2 L
使 1 号(仓库)中的角(棱)装到 2 号位, 2 号位的角(棱)放入仓库
1
第二章 逐块消灭法编码
将组成魔方的 20 个小方块进行数字化编码。至于怎样编码,每个人都可以有适应自己的方式,这里的编码方式如下。
1.角块编码
将 1 号位(仓库)中的角需要到 需翻转的棱块送到 3 位后用 的目标位置送到 2 号,用公式 4, 公式 3 使棱翻转; 进行装载,同时送上的来角,临
将 1 号位(仓库)中的棱需要到 的目标位置送到 2 号,用公式 4, 进行装载,同时送上来的棱,临
时放入“仓库”
时放入“仓库”
在 2 位加工时,1 位的角也不 断原地打转,但只要其它 7 个 角正确,这个角也就是正确 的。
5.然后我们把需要加工的块送到加工厂加工,加工完了再送回原来的位置去。
具体各个需要加工的块怎么移到加工厂,加工完后又怎么送回去,请看下面 cube-maste“r 三阶盲拧入门级教程—逐块消灭法(One
by One)。学了这个方法后,就可以学同时解决多块的方向、多块的位置交换的高级方法了,那样速度就会提高。
注:移位时不是直接移到目标位置,而是目标位置去“装卸车间”接,同时把自己位置上的块送到仓库。
4.方向编码
TRIO 应用指南..

运动控制的概念一:运动控制运动控制是指在复杂的条件下,将预定的控制方案、规划指令转变成期望的机械运动。
实现对被控目标精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些控制的综合控制。
二:运动控制系统运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控制器提供运动输出的放大器、反馈系统(传感器/变送器),可基于输出和输入的比较值,调节过程变量。
有的系统还包括操作员界面或主机终端前端处理设备。
控制系统组成可用以下框图来表示:由图可知一套控制系统在执行任务时的大体过程:首先,操作者通过上位机或触摸屏给运动控制器输入一些必要的控制参数。
控制器根据这些参数,对其内部进行一些相关的初始化,同时根据初始值,作相应的运算向驱动器发送控制信号,进而控制电机的动作。
电极是否根据控制信号工作,和执行的状况会通过码盘反馈给运动控制器。
运动控制器是控制系统中的关键组成部分。
运动控制器的硬件配置、软件开发环境、编程语言等对系统的开发和维护有着重要的影响。
齐全的、灵活的硬件配置,不仅能使系统设计更加方便快捷,还给日后的系统升级留出了空间。
简便的编程语言,高度集成的软件开发环境,是快速开发出相应功能软件的保证。
TRIO 运动控制器无论从软件还是硬件上都最大程度的考虑了开发和维护的简单性,高效性,开放性。
下面就结合TRIO MC206和某系列伺服电机,介绍如何用应用TRIO 运动控制器进行运动控制系统开发。
MC206X 硬件介绍MC206X采用Trio高性能32位DSP技术,具有4轴伺服或步进功能的控制器,此外还有一个编码器输入轴。
Trio采用先进的FPGA技术,使得具有4轴伺服和步进功能控制能力的电路板尺寸缩小,可以安装在具有导轨并且体积紧凑的盒子里。
此外,其内部空间还可以容许安装一块子板(需要P399适配器)。
子板可以是额外的轴或者是通信功能子板。
用户程序是通过运行在PC机上的Motion Perfect软件来进行开发的,采用的是Trio多任务Trio BASIC语法格式进行编写的。
TRIO应用指南

运动控制的概念一:运动控制运动控制是指在复杂的条件下,将预定的控制方案、规划指令转变成期望的机械运动。
实现对被控目标精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些控制的综合控制。
二:运动控制系统运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控制器提供运动输出的放大器、反馈系统(传感器/变送器),可基于输出和输入的比较值,调节过程变量。
有的系统还包括操作员界面或主机终端前端处理设备。
控制系统组成可用以下框图来表示:由图可知一套控制系统在执行任务时的大体过程:首先,操作者通过上位机或触摸屏给运动控制器输入一些必要的控制参数。
控制器根据这些参数,对其内部进行一些相关的初始化,同时根据初始值,作相应的运算向驱动器发送控制信号,进而控制电机的动作。
电极是否根据控制信号工作,和执行的状况会通过码盘反馈给运动控制器。
运动控制器是控制系统中的关键组成部分。
运动控制器的硬件配置、软件开发环境、编程语言等对系统的开发和维护有着重要的影响。
齐全的、灵活的硬件配置,不仅能使系统设计更加方便快捷,还给日后的系统升级留出了空间。
简便的编程语言,高度集成的软件开发环境,是快速开发出相应功能软件的保证。
TRIO 运动控制器无论从软件还是硬件上都最大程度的考虑了开发和维护的简单性,高效性,开放性。
下面就结合TRIO MC206和某系列伺服电机,介绍如何用应用TRIO 运动控制器进行运动控制系统开发。
MC206X 硬件介绍MC206X采用Trio高性能32位DSP技术,具有4轴伺服或步进功能的控制器,此外还有一个编码器输入轴。
Trio采用先进的FPGA技术,使得具有4轴伺服和步进功能控制能力的电路板尺寸缩小,可以安装在具有导轨并且体积紧凑的盒子里。
此外,其内部空间还可以容许安装一块子板(需要P399适配器)。
子板可以是额外的轴或者是通信功能子板。
用户程序是通过运行在PC机上的Motion Perfect软件来进行开发的,采用的是Trio多任务Trio BASIC语法格式进行编写的。
TRIO 209,205说明书

用户一般需要直观的监控整个系统的运行情况,这样控制器会根据客户 的需要,把相关信息上传到上位机或触摸屏。 ¾ 驱动器
受控于运动控制器,接收到运动控制指令后,按指令要求,控制电机等 执行机构完成动作。 ¾ 执行机构
3.1.2 各部分介绍
CAN 总线:
6
TRIO MOTION TECHNOLOGY
标准的 CAN 总线,其连接端子在五孔连接器上。用于 I/O 模块扩展,也可 以用作与其它 CAN 总线设备通讯。 24V 数字输入通道:
在 Euro209 和 Euro205x 本体上提供了多路数字量输入专用通道,可用作零点 开关、限位开关、进给保持(暂停)开关等,在 24V 输入电路连接时把 I/O 电源 的 0v 与控制器上 I/O0v 相接。 模拟量输入通道:
应用 TRIO BASIC 语言可以对 Euro205x 进行多任务编程,Euro205x 支持脱机 运行 TRIO BASIC 程序,当程序调试完毕,下载到控制器后,如果不需要上位机 的话,Euro205x 可以单独运行。在运动控制器内部固化许多运动算法,只需要用 几条简单的 TRIO BASIC 指令,就可产生像凸轮曲线、电子此轮、轴连接、插补 等复杂的运动,以及协调运动。
¾ 运动控制器 控制器是整个系统的核心,其功能主要是接收运动控制信号及参数,做
出运算,把控制输出送到相应的驱动器或执行器。 一、运动参数,控制信号的获取
要完成一定规律的运动,必须要有一定的参数作为前提,比如速度、距 离、哪一轴等,这些参数一般由上位机,或触摸屏传送到控制器中。控制信 号包括各种限位,手自动转换等,这些信号一般通过数字量输入,或模拟量 输入,传送到控制器内部。 二、对运动参数的运算
TRIO-basic指令--MOVEMODIFY

TRIO-basic指令--MOVEMODIFYSyntax:MOVEMODIFY(position)Parameters:position:Absolute position for the current move to complete at. 当前移动的绝对值位置⼀定要完成Description:MOVEMODIFY will change the absolute end position of a single axis , , , or MOVEMODIFY that is in the last position in the movement buffer. If there is no motion command in the movement buffers or the last movement is not a single axis linear move then MOVEMODIFY is loaded.MOVEMODIFY将改变单轴移动的绝对末端位置,MOVEABS、MOVESP、MOVEABSSP或MOVEMODIFY位于移动缓冲区中的最后⼀个位置。
如果运动缓冲区中没有运动命令,或者最后⼀次运动不是单轴线性移动,则加载MOVEMODIFY。
If the change in end position requires a change in direction the move in is ed. This will use unless has been specified.If there are multiple buffered linier moves the MOVEMODIFY will only act on the command in front of it in the buffer.如果有多个缓存运动指令MOVEMODIFY将只对缓冲区最后的⼀个指令执⾏操作MOVEMODIFY(position 位置) 个⼈理解:这条指令只对 , , , 起作⽤,当他们在运动过程中遇到MOVEMODIFY的时候则会取消⾃⾝运动,执⾏MOVEMODIFY⾥⾯的条件。
鸡舍控制器 TRIO控制器 用户手册说明书

User ManualTRIO鸡舍控制器Ag/MIS/UmCn-2844-05/22 Rev 1.2P/N: 116867鸡管家 TRIO控制器User ManualSoftware version 5.0.15Rev 1.2, 03/2023该使用和维护手册与附带的技术文档是设备的重要组成部分.该文档专为设备的使用者使用:在没有系统装配者的预先授权下,整个文档或文档的任一部分都不能进行复制、作为文件存入电脑内存或传送至第三方.蒙特保留在依照技术和法律的发展下对设备进行有效更改的权利.索引章节页码1简介---------------------------------------------------------------------------------------------------- 71.1免责声明------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 71.2介绍------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 71.3备注------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 7 2鸡管家TRIO触摸屏的使用 ------------------------------------------------------------------------ 82.1图标------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 82.2控制面板------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 9 3基本设置---------------------------------------------------------------------------------------------103.1定义通用设置-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 103.1.1定义偏好参数 (10)3.1.2定义时间/日期 (11)3.1.3定义房舍设置 (12)3.2批次设置--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 123.2.1定义批次设置参数 (12)3.2.1.1手动设置 --------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 133.2.1.2批次设置向导--------------------------------------------------------------------------------------------------------------------------------------------------------------- 143.2.2定义批次设置 (16)3.3调整动物数量-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 173.4查看鸡管家TRIO版本----------------------------------------------------------------------------------------------------------------------------------------------------- 18 4温度设置---------------------------------------------------------------------------------------------194.1关于温度曲线-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 194.2配置温度曲线-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 204.2.1定义温度曲线参数 (20)4.2.2定义温度曲线设置 (21)4.3紧急温度控制-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 21 5通风介绍---------------------------------------------------------------------------------------------225.1定义最小和最大通风 ------------------------------------------------------------------------------------------------------------------------------------------------------- 225.2设置风机/通风方式 ---------------------------------------------------------------------------------------------------------------------------------------------------------- 235.2.1基础通风 (23)5.2.2额外通风 (23)5.2.3隧道通风 (24)6最大最小通风模式 ---------------------------------------------------------------------------------266.1建筑结构概要-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 266.2定义基本通风模式-------------------------------------------------------------------------------------------------------------------------------------------------------------- 276.2.1定义动态通风模式 (28)6.2.2根据体重进行通风 (30)6.2.2.1如何按体重进行通风-------------------------------------------------------------------------------------------------------------------------------------------- 306.2.2.2通过体重参数确定通风模式 ------------------------------------------------------------------------------------------------------------------------- 306.2.3添加曲线 (31)7通风级别---------------------------------------------------------------------------------------------327.1基本通风设置的配置 ------------------------------------------------------------------------------------------------------------------------------------------------------- 327.2基本通风--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 337.2.1定义基本通风 (33)7.2.2风机选型 (35)7.2.2.1模拟风机 --------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 367.2.2.2模拟风扇 --------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 377.2.2.3风机(高效风机) -------------------------------------------------------------------------------------------------------------------------------------------------- 397.2.2.4风机轮替 --------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 407.2.3进风口和窗帘通风 (42)7.2.3.1级别控制 --------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 427.2.3.2静态压力 --------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 447.3额外通风--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 467.3.1额外通风简介 (46)7.3.2额外通风的设定 (46)7.4隧道通风--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 477.4.1隧道通风参数的设定 (48)7.4.2定义隧道通风设置 (49)7.4.3隧道门 (49)7.4.4定义风冷因子 (50)7.5进气口校准的配置-------------------------------------------------------------------------------------------------------------------------------------------------------------- 517.6搅拌风扇--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 52 8蒸发冷却功能 ---------------------------------------------------------------------------------------538.1冷却原理--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 538.2选择降温模式-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 538.2.1连续 (54)8.2.2循环 (55)8.2.3斜坡增减 (56)9供暖功能---------------------------------------------------------------------------------------------579.1定义中心加热器参数 ------------------------------------------------------------------------------------------------------------------------------------------------------- 579.2区域加热器 -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 589.2.1定义非可变区域加热器 (58)9.2.2可变区域加热器的设定 (58)10育雏区------------------------------------------------------------------------------------------------60 11饲料和料塔管理 ------------------------------------------------------------------------------------6211.1饲喂总结--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 6211.2设置饲喂--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 6211.3配置料塔--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 64 12光照程序---------------------------------------------------------------------------------------------6612.1开/关灯------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ 6612.20-10V可调光灯----------------------------------------------------------------------------------------------------------------------------------------------------------------------- 6812.3光照设置--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 70 13定义预期的鸡的体重 ------------------------------------------------------------------------------7113.1参考鸡曲线 -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 7113.1.1启用曲线 (71)13.1.2禁用曲线 (73)13.2公鸡/母鸡体重----------------------------------------------------------------------------------------------------------------------------------------------------------------------- 7413.2.1性别区分称重 (74)13.2.2无区分称重 (75)14空气质量---------------------------------------------------------------------------------------------7614.1定义空气质量参数-------------------------------------------------------------------------------------------------------------------------------------------------------------- 7614.2定义空气质量设置-------------------------------------------------------------------------------------------------------------------------------------------------------------- 77 15计时器------------------------------------------------------------------------------------------------79 16警报---------------------------------------------------------------------------------------------------8016.1定义警报参数-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8016.1.1定义 (80)16.1.2报警测试 (81)16.1.2.1手动测试 --------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8116.1.2.2定时自动测试--------------------------------------------------------------------------------------------------------------------------------------------------------------- 8116.2查看警报--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8216.3定义辅助警报器-------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8316.4发送通用警报-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 84 17历史记录---------------------------------------------------------------------------------------------8517.1环境条件和区域-------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8517.2警报和事件 -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8617.3水历史记录 -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8717.4设备历史记录-------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 88 18重置、保存和加载 ---------------------------------------------------------------------------------8918.1重置--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 8918.2设备的保存或加载-------------------------------------------------------------------------------------------------------------------------------------------------------------- 8918.3查看日志--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 9018.4软件更新--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- 91 19质保(请勿翻译) ---------------------------------------------------------------------------------921 简介1.1 免责声明在指南发行后,蒙特因为生产以及其它原因,保留对设备规格、数量和规模大小等内容进行更改的权力。
trio控件使用资料

trio控件使用资料第12章使用T RIOA CTIVE X控件Motion Coordinator Technical Reference Manual运动控制器技术参考手册Using the Trio ActiveX Control 12-3使用Trio ActiveX Control 12-3目录要求说明:....................................................................................................................... ......... 12-4 ActiveX控件的安装 ................................................................................................................. 12-4 使用控件........................................................................................................................... ......... 12-4 连接命令........................................................................................................................... ......... 12-5 Open.................................................................................................................... .............. 12-5 Close ................................................................................................................... .............. 12-5 IsOpen................................................................................................................. .............. 12-6 SetHost .............................................................................................................. ............... 12-6 GetConnectionType ....................................................................................... ................. 12-6 属性........................................................................................................................... ................. 12-7............. 12-7 HostAddress...................................................................................................... ............... 12-7 CmdProtocol..................................................................................................... ................ 12-8 运动命令........................................................................................................................... ......... 12-9 MoveRel.............................................................................................................. .............. 12-9 Base ..................................................................................................................... ............. 12-9 MoveAbs............................................................................................................. .............. 12-9 MoveCirc............................................................................................................. ............ 12-10 AddAxis............................................................................................................... ............ 12-10 CamBox .............................................................................................................. ............ 12-10 Cam ..................................................................................................................... ............ 12-11 Cancel ................................................................................................................. ............ 12-11 Connect............................................................................................................... ............ 12-11 Datum.................................................................................................................. ............ 12-12 Forward............................................................................................................... ............ 12-12............. 12-13 MoveLink ........................................................................................................... ............. 12-13 MoveModify ..................................................................................................... ............... 12-14 RapidStop........................................................................................................... ............ 12-14 过程控制命令.......................................................................................................................... 12-15Run ...................................................................................................................... ............ 12-15 Stop ..................................................................................................................... ............ 12-15 变量命令........................................................................................................................... ....... 12-15 GetTable ............................................................................................................. ............ 12-15 GetVariable........................................................................................................ ............. 12-16 GetVr ................................................................................................................... ............ 12-16 SetTable............................................................................................................... ........... 12-16 SetVariable......................................................................................................... ............ 12-16 SetVr..................................................................................................................... ........... 12-17 输入/输出命令......................................................................................................................... 12-18........... 12-18 Get ....................................................................................................................... ............ 12-18 In .......................................................................................................................... ............ 12-18 Input..................................................................................................................... ............ 12-18 Key........................................................................................................................ ........... 12-19 Linput................................................................................................................... ............ 12-19 Op ........................................................................................................................ ............ 12-19 Pswitch................................................................................................................ ............ 12-19 ReadPacket......................................................................................................... ........... 12-20使用控件12- 2 -Record......................................................................................................... .................... 12-20 Regist .................................................................................................................. ............ 12-20 Send .................................................................................................................... ............ 12-21 Setcom................................................................................................................ ............ 12-21 普遍性命令........................................................................................................................... ... 12-21 Execute ........................................................................................................................... 12-21 GetData............................................................................................................... ............ 12-22 SendData............................................................................................................ ............ 12-22 事件........................................................................................................................... ............... 12-22 OnBufferOverrunChannel5/6/7/9 ............................................................. ................... 12-22 OnReceiveChannel5/6/7/9........................................................................... ................ 12-22 TrioPC 状态 ................................................................................................................... 12-23使用控件12- 3 -要求说明:●计算机具有USB或者以太网接口●Windows 98,M E,2000或XP操作系统●TrioUSB 驱动●TrioPCI 驱动●TrioPC OCX控件●通过TrioPC ActiveX连接控制Trio运动控制器的知识●Trio BASIC编程语言的相关知识ActiveX控件的安装启动程序“Install_TrioPCMotion”并且按照屏幕提示执行。
TRIO BASIC中文手册

描述
包括轴的加速率 ADDAX_AXIS 返回当前由 ADDAX 连接的基本轴数
包括轴的类型
包括轴的状态 定义 Windows 结束检测标记 当使用 CONNECT 指令时,定义连接比率
包括回零速度 DATUM_IN 包括作为原点搜寻的输入数 DECEL 包括轴的减速率 DEMAND_EDGES 包括 DPOS 轴参数的当前值 DPOS 包括由运动指令产生的目标位置
给现在正在运动的轴。
BASE 用于设置基本轴 CAM 依据存储在 TABLE 变量中的数组文件运动 CAMBOX 依据存储在 TABLE 变量中的数组文件运动。运
动与其它轴的运动形成连续,多样的软件电子齿轮。
CANCEL 取消轴的运动 CONNECT 将轴的目标位置与驱动轴的测量位置连接,形成
DATUM DEFPOS FORWARD MATCH MHELICAL MOVE
MOVECIRC MOVELINK
运动,测量位置为相对于参考原点的绝对位置。
MOVECIRC 两轴圆弧插补 MOVELINK 在基本轴产生直线运动,并通过电子齿轮比与
MOVEMODIFY
RAPIDSTOP REGIST REVERSE
连接轴的测量位置连接。
MOVEMODIFY 改 变 当 前 轴 线 性 运 动 ( MOVE 或 MOVEABS)的绝对位置。 RAPIDSTOP 取消当前所有轴的运动 当发现标记输入或编码器的 Z 信号,捕捉轴的位置。 REVERSE 连续反方向运动,速度由参数 SPEED 确定。
SCOPE_POS
SELECT SERVO_PERIOD STEPLINE TABLE TRIGGER TROFF TRON TSIZE VERSION VIEW VR WDOG
Trio运动控制器PPT课件

指令系统
二、运动指令
MOVE:相对运动 MOVEABS:绝对运动 MOVECIRC:圆弧插补 MHELICAL:螺旋线插补 FORWARD:恒速正向运动 REVERSE:恒速负向运动 RAPIDSTOP:停止 DATUM:回原点 CAM:凸轮运动(Time_Based)
CAMBOX:凸轮运动(Position_Based) MOVELINK:同步控制 CONNECT:电子齿轮 ADDAX:虚拟轴运动 REGIST:高速位置锁存或色标捕捉 MOVEMODIFY:运动中改变目标位置 DEFPOS:重新定义当前位置 ADD_DAC:全闭环控制 WDOG:输出使能
PC+250K
Opto-Isolated Input
4
16
8
8
20
4 Assignable Opto-Isolated I/O
8(Output 8
8
10(Output
Analog Inputs
0
s2)
1
2
s4)(option)
Max. No. Daughter Boards
0
1
1
16
0
Serial Ports
REV_JOG:指定负向点动输入点 RS_LIMIT:设置负向软限位 FASTJOG:设置快速点动输入点 OFFPOS:位置偏置 REPDIST:设定位置记数范围 MPOS:读取实际位置 DPOS:读取指令位置 DAC:设置模拟量输出 AIN:读取模拟量输入 FHOLD_IN:设置进给保持输入点 FHSPEED:设置进给保持速度
Trio运动控制器
性能介绍
Trio运动控制器
一、主要特点 二、典型系统配置 三、产品系列 四、性能指标 五、指令系统 六、MotionPerfect 七、OCX Component 八、运动形式 九、应用行业 十、应用案例
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5
TRIO MOTION TECHNOLOGY
要用几条简单的 TRIO BASIC 指令,就可产生像凸轮曲线、电子此轮、轴连接、 插补等复杂的运动,以及协调运动。
在 MC206X 上配有和伺服放大器上 servo_on 相对应的常开继电器开关。 用作对伺服放大器的使能。值得注意的是,在控制器上此功能只是一个开关的闭 合,所以要把此开关和伺服电源串接到一起。此继电器的可由 Motion Perfect 中的 Drive Enable 按钮或 TRIO BASIC 指令 WDOG=ON/OFF 来控制。 模拟量输出:
3.1.1 总体介绍
MC206 是 TRIO 公司推出的一款四轴运动控制器,通过软件配置各轴属性, 可以对四个伺服轴或四个步进轴或二者的组合进行控制。MC206X 的基本硬件 配置包括:CAN 总线通讯接口 1 个、数字量输入通道 8 路,数字量输入输出双 向通道 8 路、模拟量输入通道 1 路、伺服使能 1 个、伺服速度控制模拟量指令 4 路、差分式编码器输入一个、差分式编码器/脉冲输出 4 个、USB 接口一个、串 行口两个。
1 用途............................................................................................................................................ 2 1.1 应用领域........................................................................................................................ 2 1.2 应用实例........................................................................................................................ 3
四、接收反馈,监控运动执行情况 在控制器发出运动指令后,会根据反馈回来的信号,对运动执行情况作
出判断和调整。 五、上传监控信息
用户一般需要直观的监控整个系统的运行情况,这样控制器会根据客户 的需要,把相关信息上传到上位机或触摸屏。 驱动器
受控于运动控制器,接收到运动控制指令后,按指令要求,控制电机等 执行机构完成动作。 执行机构
一般客户传送到控制器内部的参数都是比较直观的参数,这些参数还不 是控制器赖以使用的实际参数,这就需要做一些转换运算,这些也是在控制 器内的运算子程序中完成的。 三、运动控制
当控制器得到足够的参数后,会根据这些参数和客户编制的运动控制程 序,对机械部件发出指令,控制其运动。
4
TRIO MOTION TECHNOLOGY
3.1.2 各部分介绍
CAN 总线: 标准的 CAN 总线,其连接端子在五孔连接器上。用于 I/O 模块扩展,也可
以用作与其它 CAN 总线设备通讯。 24V 数字输入通道:
在 MC206X 本体上提供了 8 路数字量输入专用通道,可用作零点开关、限 位开关、进给保持(暂停)开关等,在 24V 输入电路连接时把 I/O 电源的 0v 与控制器上 I/O0v 相接。 24V 数字 I/O 通道:
TRIO MOTION TECHNOLOGY
目的 ........................................................................................................................................................ 2 原则 ........................................................................................................................................................ 2 内容 ........................................................................................................................................................ 2
3 配线............................................................................................................................................ 5 3.1 MC206X 介绍............................................................................................................... 5 3.2 供电................................................................................................................................ 7 3.3 控制器、驱动器配线................................................................................................... 7 3.4 孔制器、上位机连接.................................................................................................11
运动控制系统包括处理运动算法和信号的控制器、增强信号,可供应运动控 制器提供运动输出的放大器、执行机构、反馈系统(传感器/变送器),可基于输 出和输入的比较值,调节过程变量。有的系统还包括操作员界面或主机终端前端 处理设备。
2.1.2 运动控制系统框图
3
TRIO MOTION TECHNOLOGY
在 MC206X 上有和轴 0—3 对应的四路模拟量输出,用作速度控制模式下 的速度指令输出。 差分式编码器输入:
4 软件编程 .................................................................................................................................11 4.1 支持软件使用 .............................................................................................................11 4.2 简单运动指令举例.....................................................................................................22 4.3 简单运动控制程序举例 ............................................................................................28
2.2 各部分功能
人机交互:一般由上位机或触摸屏完成人机交互功能。其作用主要有两点: 1. 参数初始化
这一过程是每一个控制系统都必须做的工作,所设计的系统主要根据这 里下载的参数进行工作。相当于告诉系统一个运动规则。 2. 监控系统运行
也是一参数的形式报告系统当前运动状态,包括系统是否运行指定动 作、运 动过程中是否出错、运动进行的进度等等。 运动控制器
受控于驱动器,一整个系统的动力源。系统中每一个动作都来自这里, 我们所说的运动控制,其实也就是对执行机构的控制。 反馈装置
反馈装置是控制系统中比不可少的组成部分,一般都安装在执行机构 上,比如电机上的码盘反馈,可以对执行机构的位置速度等进行测量并反馈 到驱动器或控制器。
3 配线
3.1 MC206X 介绍
2 运动控制系统构架................................................................................................................... 3 2.1 组成................................................................................................................................ 3 2.2 各部分功能 ................................................................................................................... 4
原则
简单、实用、图文并茂。
内容
1 用途
1.1 应用领域
TRIO 运动控制器主要应用在工业控制领域,可以对伺服,步进,变频器等 进行控制。其特点是指令简单,完成复杂的多轴协调运动,只需几条简单的指令 就可以完成。
2
1.2 应用实例TRIO源自MOTION TECHNOLOGY