SIMOTION-D在板带在线激光焊机中的应用
SIMOTION D435在搅拌摩擦焊接机中的应用
YANG J i — d o n g ,L I N Z h e n g ,L I N J u n — q i a n g
( 1 . S c h o o l o f Me c h a n i c a l E n g i n e e r i n g ,C h o n g q i n g U n i v e r s i t y , C h o n g q i n g 4 0 0 0 4 4 , C h i n a ;
we l d i n g e q u i p me n t wh i c h c a n b o t h a c h i e v e t wo d i me n s i o n l a c u r v e nd a d o c o n s t a n t p r e s s u r e c o n t r o l wa s d e s i g n e d . T h r o u g h t h e na a l y s i s o f t h e c o n r t o l e l e me n t s nd a w e l d i n g p i r n c i p l e o f f i r c t i o n s t i r we l d i n g , t h e S I MOT I ON D4 3 5 c o n t r o l s c h e me wa s s e l e c t e d a f t e r he t c o mp a r i s o n o f v a r i o u s c o n t r o l s c h e me s .B a s e d o n t h e a n a l y s i s o f t h e d e s i r e d f u n c t i o n, t h e mo d u l a r p r o g r a mmi n g me t h o d a n d t h e i n t e ra g t e d u s e me t h o d
板带在线光纤激光焊缝机研制成功
下 ,来 自北 京 航 空航 天 大 学 、 中科 院 物 理 所 和 金 属 所 、北 京
散 热 的方 式 无 法 保 证 减 速 机 持 续 工 作 在 最 佳 状 态 。特
科 技 大 学 、 清华 大 学等 院 所 的科 学 家 ,组 成 国 家 “ 7 ”计 划 93
“ 高性 能 轻 质 非 晶 态合 金 若干 关键 基 础 问题 研 究 ” 项 目研 究 团 队 ,向 高性 能非 晶 态合 金 领域 发 起 了科研 攻 关 、
太 阳能 电池阵 ,今后 有 可 能插 上 用金 属 玻 璃 制作 的
“ 中国 式 翅膀 ”飞 上 太 空 。
石煤 机掘 进机 产 品再添新 专 利
南冀中能 源石家庄煤矿 机械有 限责任公 司 自主创 新研 制 的掘进 机截割减 速机双循环 润滑冷却装 置 日前 取得 国家实 用新型专利 ,至此 ,该公 司生产 的掘进机 产品 已拥有 实用新型 专利1项 ,发 明专利 1 ,为打造 6 项 国产高端煤矿采掘装备奠定了基础 。
重型 模 锻 液 压 机 的空 白。
板带 在线 光纤 激光焊 缝机研 制成 功
日前 ,武汉凯奇 特种焊接 设备有限 责任公司研 制
成功 中闰第一台板带在线5 W光纤激光缝焊机 。该光纤 k 激光焊机是继2 0年与宝钢合作开发制造 的COz 08 激光焊 机后独立 自主研发 、设计的轻型光 纤激光焊机 。
等 都 加 大 了 对这 一领 域 的 支持 力 度 ,设 立 了相 关 重 大研 究 项 润滑 冷却难题 。在现有技术 中 ,煤矿 用掘进机截 割减
目。
速机只 能通过装机 或维修 时向减速机 内注入润滑 油实
20 年 起 ,在 科 技 部 、 国 家 自然科 学基 金 委 等 部 门 支持 现对齿 轮及轴承 的润滑 目的 ,且单纯 依靠减速机壳 体 07
西门子控制器SIMOTIOND在飞剪中的应用研究
西门子控制器 SIMOTIOND在飞剪中的应用研究摘要:本文讨论了基于嵌入式西门子控制器的simotiond系统的体系结构。
在深入研究的基础上,开发了相应的运动控制软件,给出了运动控制软件的基本功能模型。
实现了SIMOTION、PROFIBUS DP模块和PLC在飞剪仿真系统中的应用模式。
关键词:飞剪;嵌入式西门子控制器SIMOTIOND;PLC;Profibus-DP1.前言本文讨论了基于嵌入式西门子控制器的simotiond系统的体系结构。
在深入研究的基础上,开发了相应的运动控制软件,给出了运动控制软件的基本功能模型。
实现了SIMOTION、PROFIBUS DP模块和PLC在飞剪仿真系统中的应用模式。
1.西门子控制器SIMOTIOND系统架构SIMOTION体系结构的核心是古高公司开发的嵌入式SIMOTION。
simotiond控制器的核心是基于PC-104总线和高速DSP芯片的开放式同步运动控制卡。
它与古高公司开发的PROFIBUS-DP通信从卡一致,构成具有现场总线通信功能的嵌入式控制器。
Simotiond提供4通道16位D/a模拟电压(± 具有6个4倍频差分光电编码器反馈信号接口,输入信号频率可达8MHz。
可编程数字PID+速度前向碰撞+加速度前向碰撞滤波模式,卡上的DSP芯片有专门的同步控制程序,基本上可以监控进给计数编码器和剪刀位置编码器,并对剪刀驱动电机进行高频实时调节,使剪刀在高速板达到设定的裁切长度时能移动到裁切点,并在同步区域与板材保持同步运动。
基于PROFIBUS通信从卡和pc104与运动控制卡相连的通信主卡,构建了一个典型的PROFIBUS-DP单主从控制西门子控制器的仿真系统。
PC-104与西门子控制器simotion通信。
一方面,SIMOTION收集的数据和状态被发送到主机进行监控。
另一方面,将主机的参数设定、电机调整和误差补偿指令发送给simotiond控制器,对送料和剪切电机进行控制。
SIMOTION--D435--实例
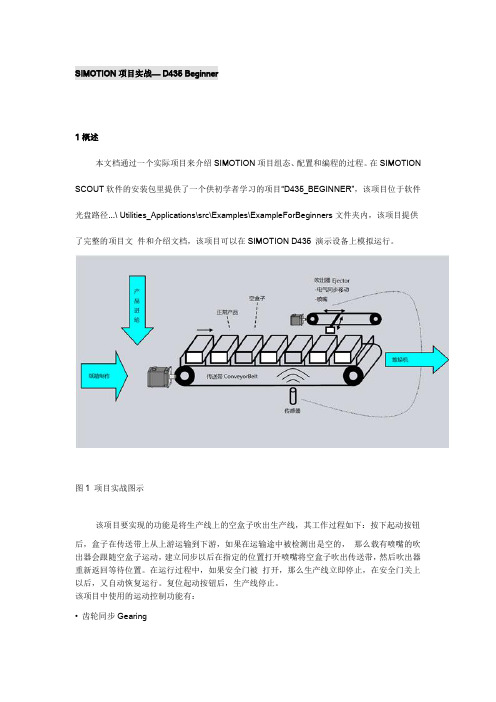
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
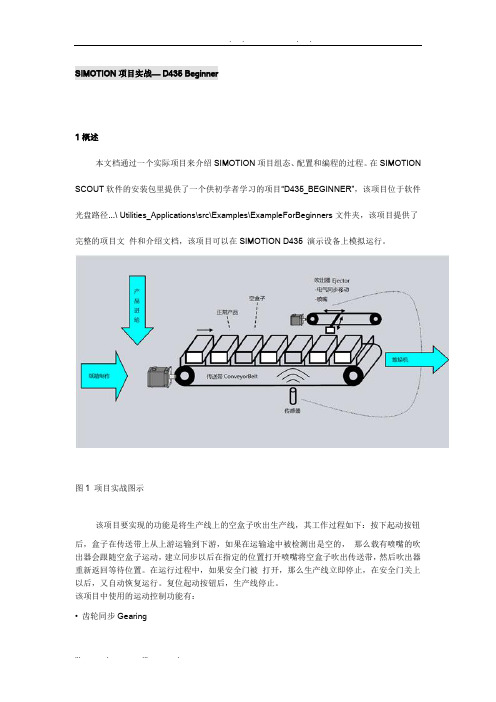
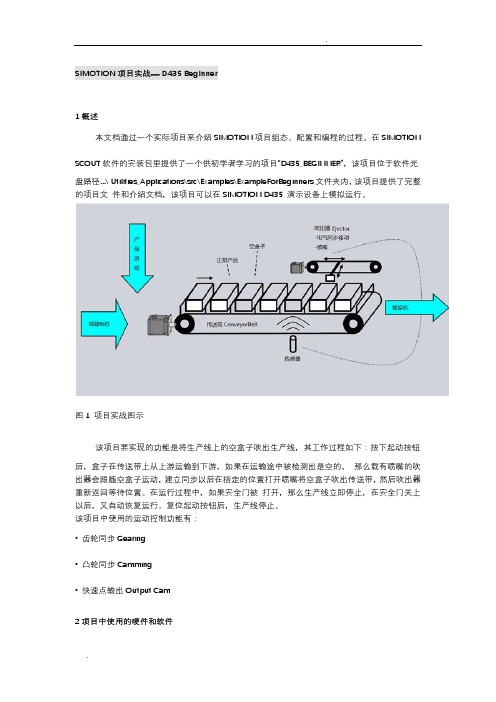
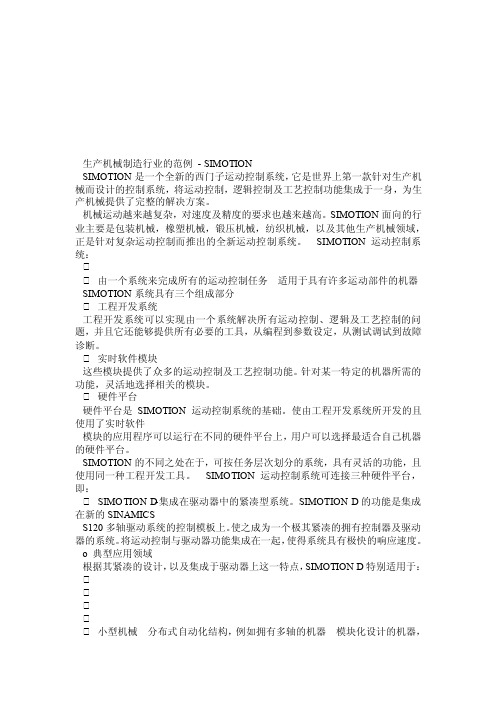
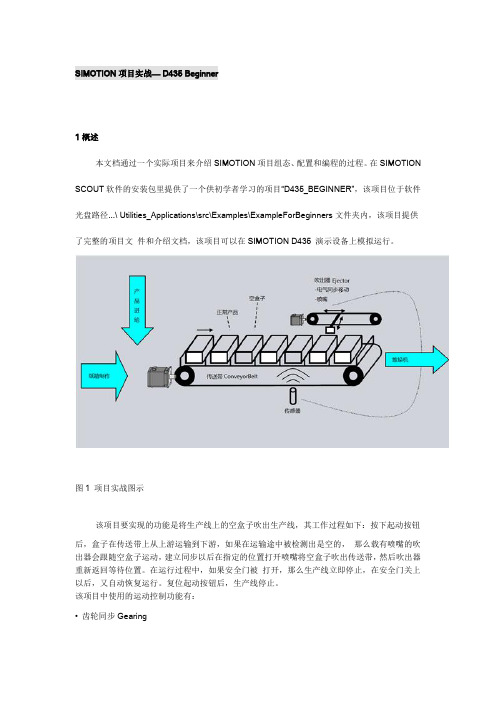
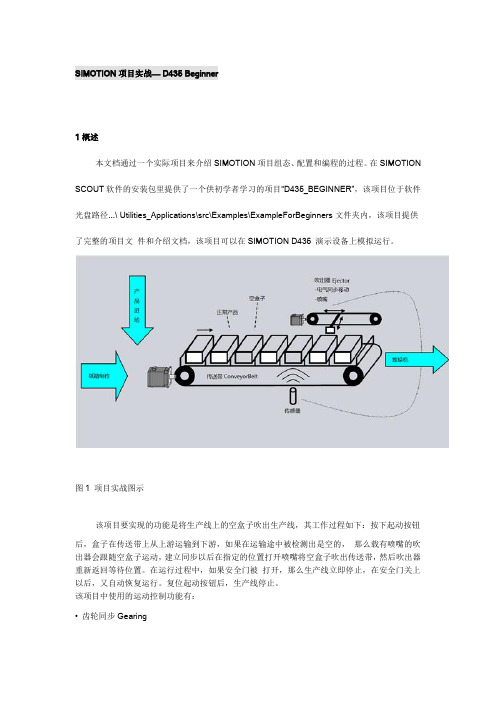
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
simotion d 矢量轴控制
Simotion D 矢量轴控制一、Simotion D 简介Simotion D 是西门子公司推出的一种多功能运动控制系统,可用于对工业生产中的各种运动进行精确控制。
该系统结合了PLC、运动控制器和HMI的功能,具有高性能、高可靠性和灵活性等特点,广泛应用于各种自动化设备和生产线中。
二、Simotion D 的矢量轴控制1. 矢量轴控制的概念矢量轴控制是指通过对电动机控制系统进行矢量控制,实现对运动轴的高精度控制。
与传统的标量控制相比,矢量轴控制具有更高的动态性能和控制精度,能够更好地适应复杂的工业生产环境。
2. Simotion D 的矢量轴控制技术Simotion D 采用先进的矢量控制算法和高性能的数字信号处理器(DSP),实现对运动轴的精确控制。
其独特的矢量算法可以提高电机的运行效率,减小电机的热损,延长电机的使用寿命。
Simotion D 还支持多种不同类型的电机,包括同步电机、异步电机和直流电机等,满足不同工业应用的需求。
3. Simotion D 的矢量轴控制功能Simotion D 的矢量轴控制功能包括速度闭环控制、位置闭环控制、力矩控制等,能够实现对不同类型的运动轴进行精确控制。
Simotion D 还支持多轴同步控制和准同步控制,能够实现复杂的多轴运动控制任务。
4. Simotion D 的矢量轴控制应用Simotion D 的矢量轴控制广泛应用于各种自动化设备和生产线中,包括机床、食品包装机、注塑机、搬运机器人等。
在这些应用中,Simotion D 可以实现高速、高精度的运动控制,提高生产效率和产品质量。
5. Simotion D 的矢量轴控制优势Simotion D 的矢量轴控制具有以下优势:(1)高性能:采用先进的矢量控制算法和高性能的数字信号处理器,实现对运动轴的精确控制。
(2)灵活性:支持多种不同类型的电机,满足不同工业应用的需求。
(3)稳定性:实现速度闭环控制、位置闭环控制、力矩控制等多种控制功能,保证运动轴的稳定运行。
西门子运动控制器SIMOTION收放卷应用介绍
SIMOTION D Winder 包应用介绍于长波摘要:SIMOTION提供了一个可以应用于大部分开卷曲功能的应用包,其中包含了多种控制方式,多种卷径计算方法以及张力锥度、断带检测等功能。
但全面的同时带来了应用结构复杂、参数众多等问题。
本文根据以往的调试经验对Winder包的应用进行一下应用介绍,分为卷曲的基本原理、控制方式、程序结构、应用步骤四个部分。
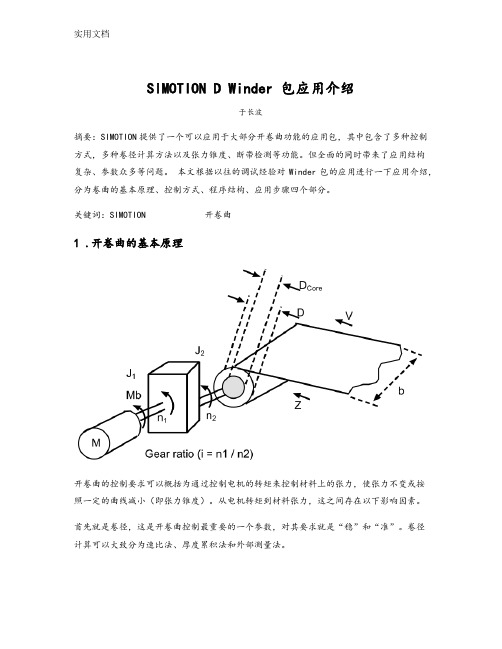
关键词:SIMOTION 开卷曲1 .开卷曲的基本原理开卷曲的控制要求可以概括为通过控制电机的转矩来控制材料上的张力,使张力不变或按照一定的曲线减小(即张力锥度)。
从电机转矩到材料张力,这之间存在以下影响因素。
首先就是卷径,这是开卷曲控制最重要的一个参数,对其要求就是“稳”和“准”。
卷径计算可以大致分为速比法、厚度累积法和外部测量法。
速比法是检测同一时刻下卷轴的转速和材料的线速度,两者相除即得到直径,这种方法实时性好,但稳定性欠佳。
在此基础上衍生出积分法和位置计算法,两者就是将一定时间内卷轴的角度位移与材料的位移相除,然后按一定的斜坡输出。
区别在于积分法是用速度的积分得到角度位移和材料位移,而位置计算法是直接取轴的位置值做计算。
这种方法稳定性好,实时性与直径计算的更新周期有关。
厚度累积法是根据卷轴的圈数和材料的厚度计算的一种方法,即卷轴每转一圈直径增加2倍的材料厚度,然后按照一定的斜坡输出。
这种方法稳定性非常好,但准确性与材料厚度的准确性有很大关系,这里所说的材料厚度并不是指材料本身的实际厚度,而是材料的实际厚度加上材料之间缝隙的厚度,即与松紧度有关。
外部测量法就是用传感器直接测量卷轴的实际直径,可分为接触式和非接触式,常见的接触式传感器有编码器和位移传感器,非接触测量传感器有激光、微波等。
由于测量数值与实际的直径可能是非线性的,所以要对测量值做非线性处理。
其次是对转矩的补偿,主要是加减速补偿和摩擦补偿。
加减速补偿指的是当材料在加速或减速时电机要提供额外的转矩对卷轴进行加减速,其大小与开卷曲机械系统的转动惯量和加减速度有关;其方向与工作方式(是开卷还是收卷)和出料方向(材料是在卷轴的上方还是下方)有关。
simotion d435

概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:/download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
1.7准连续光纤激光器在焊接上的应用(精)
(2)说明激光器的峰值功率和脉冲宽度之间的关系是什么,
在焊接领域的深熔焊工艺中,对激光的脉冲特性有什么要求?
8/13/2018
特点: (1)极高的脉冲功率和良好的脉冲能量稳定性 (2)电光转换效率>30% (3)有脉冲和连续两种模式,光束质量较高 (4)内置脉冲发生器及脉冲整形器 (5)设备成本相对较低
8/13/2018
2.2 准连续光纤激光器在焊接领域的应用 由于光束质量很高,一般情况下会使用振镜扫描方式进行焊接,不但焊接效 率高,而且焊接质量好。图1给出的是准连续光纤激光器和振镜扫描系统。
束在经过长焦距镜片后可获得聚合物焊接所需的较小的光斑尺寸,近年
来的应用也越来越受到重视。
8/13/2018
3பைடு நூலகம் 小结
本次课介绍了一种准连续光纤激光器的特点,即高的峰 值输出功率和低的平均输出功率,以及该类激光器在焊接领 域的应用情况。
8/13/2018
4. 作业思考题
(1)与传统的光纤激光器相比,准连续光纤激光器的特点 主要是什么?
长脉冲激光被称为准连续激光器,产生ms量级的脉冲,占空比为10%。这使 得脉冲光具有比连续光高十倍以上的峰值功率,对于脉冲焊接等应用来说非常有 利。 根据脉宽可将重复频率调制达500Hz,连续就是持续输出, 准连续是脉冲输 出,但是脉冲的占空比比较大,使得准连续激光器既有连续激光器的特点又有脉 冲激光器的优势。
图1 QCW 300/3000光纤激光器和焊接头及准直镜
8/13/2018
准连续光纤激光器将光纤激光器的优势很好地引入到那些需要低平均功率、 低占空比的脉冲激光焊接,例如图2所示的热导点焊,高的脉冲功率保证获得 了较大的熔深。
图2 准连续光纤激光器在薄壁件上进行的热导式焊接
SIMOTIOND435实例
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:•齿轮同步Gearing•凸轮同步Camming•快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM toROM)。
2020年整理SIMOTION--D435--实例.pdf

SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
编号名称数量订货号/备注1 SIMOTION D435 1 6AU1435-0AA00-0AA1表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
没有原始项目,如何在线连接SIMOTION设备
3
2.3.1
Copyright Siemens AG Copyright year All rights reserved
在线连接D435-2 CPU
请按表 2-1 步骤操作。 序号 1 描述 打开 PG,双击桌面上的 SIMATIC Manager 图标 序并创建一个新项目,命名为 OnlineTest。 ,打开 STEP7 主程
表 2-1 在线连接 D435-2 CPU
6
Copyright Siemens AG Copyright year All rights reserved
2.3.2
在线连接驱动器的控制单元SINAMICS_Integrated
请按表 2-2 步骤操作。 序号 1 打开网络组态。 在之前项目的基础上,在 SIMOTION SCOUT 软件中,点击工具栏上网络 配置按钮 2 ,打开 NetPro。 描述
2
Copyright Siemens AG Copyright year All rights reserved
1
概述
有些用户需要在没有 SIMOTION 原始项目的情况下,使用 SIMOTION SCOUT 软件在线连接 SIMOTION 设备,从而查看 SIMOTION 项目的故障信息。 如果没有原始项目,可以使用 STEP7 软件提供的 Upload Station to PG 功能, 先将 SIMOTION 设备中的项目上传到 PG 上,再使用该项目在线连接 SIMOTION 设备。如果还需要在线连接总线上的驱动器,比如 SINAMICS_Integrated,那么还需要在 NetPro 中激活路由功能。本文介绍了详 细的配置步骤,请参考下一节“应用举例”。
2
2.1
SIMOTION D系统组态及调试入门
而作为控制系统的工程工具,SCOUT 除了能实现以上功能外,还能进行以下工作: • 轴控制参数的设定 包括轴的机械参数、回零点方式及运动性能参数的设定。 • 控制程序编辑 包括运动控制、逻辑控制以及工艺控制。运动控制任务的图形化编程运动控制图 (MCC) 可以以流程图的方式对机器程序顺序进行图形化编程。程序也可以用LAD及FBD编程。 对于复杂的逻辑控制、数学运算及运动控制还可以用ST结构化编程语言进行编程。这 三种编程方式均集成在SIMOTION SCOUT软件中。
SIMOTION 特别关注其 SCOUT 工程开发系统的用户友好性。 运动控制、逻辑控制与工艺控制 的工程开发,以及驱动器的组态与调试,均是由一个系统完成的。 实际上所有任务的处理均 可用图形方式完成,包括组态、编程、测试及调试。 友好的用户提示信息,实用的帮助功 能,自动的检查功能简化了任务的完成过程,特别适合于第一次编制运动控制程序的用户。 SCOUT 的所有工具均被集成在一起,并具有统一的形式。
SIMOTION D 系统组态及调试入门
SIMOTION D System Configuration And Commissioning Getting Start
快速入门
Edition 03/ 2007
摘要 本文介绍了 SIMOTION D 运动控制系统项目的建立、系统调试及运动控制程序的编写。 关键词 SIMOTION D 运动控制系统、项目建立、调试、编程 Key words SIMOTION D Motion Control System、Create Project、Program
SIMOTION--D435--实例
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
基于SIMOTION D运动控制系统的新型喷涂设备
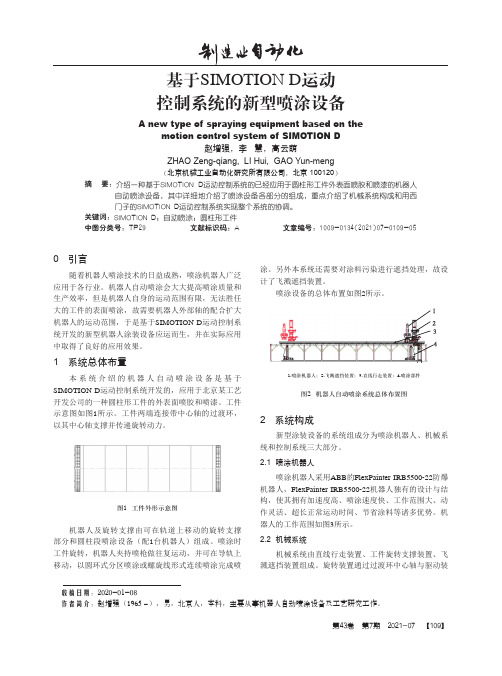
在喷房内部,通过联轴器与工件过渡环中心轴联接,实 现工件的自动旋转。
驱动装置主要由机架、交流伺服电机、减速器、万 向联轴器、升降支撑架等组成;其中交流伺服电机采用 封闭式安装,腔体内通压缩空气,做到正压防爆。
考虑到工件安装在车体两端轴承座支架上,而且 支撑装置坐落在钢轨上,其钢轨铺设误差、过渡环与工 件的安装误差,不可避免使减速器输出端和工件驱动输 入端产生偏心现象,为了弥补此偏心,采用万向联轴器 做为传递扭矩的载体,保证了工件旋转过程中平稳。即 旋转驱动方式采用交流伺服电机经减速器带动万向联轴 器,由万向联轴器与过渡环上的中心轴连接后,实现箱 体自动旋转,并且设置升降支撑架,当工件与驱动端脱 离时,支撑架可以托起万向联轴器待用。
图4 直线行走装置
直线行走装置在结构设计上,采取驱动电机减速机 外置的方式,为了不影响工人的现场编程操作,将交流 伺服电机、齿轮、齿条、拖链布置在滑动平台外部,并 且导轨装置上表面全部铺设可踩踏钢制盖板。
4 工件旋转支撑装置
工件旋转支撑装置是工件进出喷房的工具,主要包 括由两组旋转支撑装置和驱动装置组成,驱动装置固定
机械系统由直线行走装置、工件旋转支撑装置、飞 溅遮挡装置组成。旋转装置通过过渡环中心轴与驱动装
收稿日期:2020-01-08 作者简介:赵增强(1965 -),男,北京人,本科,主要从事机器人自动喷涂设备及工艺研究工作。
第43卷 第7期 2021-07 【109】
图3 机器人工作范围
置输出端万向联轴器联接,驱动工件以一定速度旋转, 机器人固定在直线行走装置的滑板上,喷枪通过喷枪支 架与机器人手腕相连接。喷涂作业时机器人夹持喷枪做 往复运动,并可在导轨上移动,对固定或旋转的工件进 行圆环式分区喷涂或螺旋线形式连续喷涂完成泡沫塑料 及其他涂料的喷涂。
西门子运动控制系统
生产机械制造行业的范例- SIMOTIONSIMOTION是一个全新的西门子运动控制系统,它是世界上第一款针对生产机械而设计的控制系统,将运动控制,逻辑控制及工艺控制功能集成于一身,为生产机械提供了完整的解决方案。
机械运动越来越复杂,对速度及精度的要求也越来越高。
SIMOTION面向的行业主要是包装机械,橡塑机械,锻压机械,纺织机械,以及其他生产机械领域,正是针对复杂运动控制而推出的全新运动控制系统。
SIMOTION运动控制系统:由一个系统来完成所有的运动控制任务适用于具有许多运动部件的机器SIMOTION系统具有三个组成部分工程开发系统工程开发系统可以实现由一个系统解决所有运动控制、逻辑及工艺控制的问题,并且它还能够提供所有必要的工具,从编程到参数设定,从测试调试到故障诊断。
实时软件模块这些模块提供了众多的运动控制及工艺控制功能。
针对某一特定的机器所需的功能,灵活地选择相关的模块。
硬件平台硬件平台是SIMOTION运动控制系统的基础。
使由工程开发系统所开发的且使用了实时软件模块的应用程序可以运行在不同的硬件平台上,用户可以选择最适合自己机器的硬件平台。
SIMOTION的不同之处在于,可按任务层次划分的系统,具有灵活的功能,且使用同一种工程开发工具。
SIMOTION 运动控制系统可连接三种硬件平台,即:SIMOTION D-集成在驱动器中的紧凑型系统。
SIMOTION D的功能是集成在新的SINAMICSS120多轴驱动系统的控制模板上。
使之成为一个极其紧凑的拥有控制器及驱动器的系统。
将运动控制与驱动器功能集成在一起,使得系统具有极快的响应速度。
o 典型应用领域根据其紧凑的设计,以及集成于驱动器上这一特点,SIMOTION D特别适用于:小型机械分布式自动化结构,例如拥有多轴的机器模块化设计的机器,也可以与SIMOTION P或SIMOTION C配合使用实时性要求极高的多轴耦合应用SIMOTION C -模块化与灵活性SIMOTION C230-2控制器是装配在S7-300机壳中。
SIMOTION--D435--实例

SIMOTION项目实战— D435 Beginner
1概述
本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示
该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮
后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:
• 齿轮同步Gearing
• 凸轮同步Camming
• 快速点输出Output Cam
2项目中使用的硬件和软件
2.1项目中使用的硬件
项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
SIMOTION D435 实例
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
SIMOTION-D435-实例
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹内,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。
运动控制系统 SIMOTION硬件平台简介及应用
SIMOTION D –基于变频器多轴控制功能集成在变频器中EnlargeSIMOTION D –基于变频器在我们的SIMOTION D 轴控制系统中,SIMOTION 功能直接集成在SINAMICS S120 变频器系统的控制模块中。
这种基于变频器的运动控制系统的优点是,它使得由控制器与变频器组成的整体系统明显更加紧凑,响应更加迅速。
另外,这种创新的多轴控制系统还在单轴或多轴控制系统中提供了极高的可扩展性和灵活性,具有多种型号,适用于各种各样的应用。
多轴控制解决方案优点一览∙将运动控制功能、工艺功能和PLC 功能直接集成到变频器中,从而显著降低成本∙设计紧凑,减小了控制柜的体积∙没有接口,因此响应速度极快典型应用建议将SIMOTION D 在需要满足以下多轴控制要求的任何应用中使用。
∙紧凑型机器∙分布式自动化设计,尤其是对于具有大量轴的机器∙模块化的机器–也可作为SIMOTION P 或SIMOTION C 的补充∙有着严格时间要求的耦合轴应用标签硬件平台,SIMOTION D,基于变频器的SIMOTION D,运动控制系统SIMOTION,SIMOTION,SIMOTION 运动控制系统SIMOTION C –基于控制器模块化且应用灵活SIMOTION C –基于控制器SIMOTION C 是一种具有S7-300 设计形式的运动控制器。
除了已集成的接口之外,也可对此控制器加以扩展以包括进SIMATIC S7-300 I/O 模块。
这些运动控制器分为两个型号:SIMOTION C240 和SIMOTION C240 PN这两个型号具有相同的PLC 和运动控制性能。
但是,它们配有不同的接口。
C240 包括 4 个内置接口,分别用于模拟、步进和液压驱动器。
C240 PN 配有一个PROFINET 接口,包括 3 个端口。
另外,这两种控制器都配有多个数字量输入和输出以及两个PROFIBUS 接口,包括PROFIdrive 和一个通讯用工业以太网接口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SIMOTION D在轧钢线板带激光焊机中的应用
SIMOTION D in steel rolling line plate with the
application of laser welding
刘千军
(武汉大族金石凯激光系统有限公司,武汉)
摘要:该论文主要介绍SIMOTION D在轧钢线板带激光焊机中的应用,充分利用SIMOTION的各种工艺对象,包括轴、多组同步对象、快速输入等,同时通过LAD编程方式实现全自动在线激光加工设备。
关键词:SIMOTION D,CU320,同步,快速输入,激光
Abstract: this paper mainly introduces SIMOTION D in steel rolling line plate with the application of laser welding, make full use of various process SIMOTION objects, including the axis of synchronous object, and quickly enter etc., and through the LAD programming realize automatic on-line laser processing equipment.
Key Words: SIMOTION D,CU320,Cam,MeasuringLnput,Laser
一、项目介绍
1、背景介绍
目前我国钢铁行业处于主导地位的典型冷轧工艺路线是:转炉冶炼一炉外精炼一初轧开坯一热连轧一酸洗一冷轧一退火一平整一镀锌(锡)一成产品。
在此典型的冷轧工艺中,板带焊接设备必不可少。
运行过程中,先行带尾与后行带头必需进行焊接,才能保证生产线的连续作业。
板带焊接的常用工艺有电弧焊、窄搭接焊、激光焊等几种,激光焊机至今为止全部是进口设备。
宜昌三峡全通涂镀板股份有限公司是以生产超薄涂镀板为主要产品的大型企业,为了降低设备采购成本,宜昌三峡全通涂镀板股份有限公司与武汉大族金石凯激光系统有限公司合作,武汉大族金石凯激光系统有限公司研发完成了国内首台板带激光焊机,不仅填补了该产品国内空白,而且还抑制了进口设备的价格。
2、设备组成
(图1)
板带激光焊机主要由以下四大部件组成:
1)机械部分:机械部分成T型,各装置名称及功能分别如下:★入口/出口活套装置:用于钢带的挡料,存储一定的钢带,方便对中。
★入口/出口夹送装置:用于钢带的送料,将带头、带尾准确送到主机的夹钳下,方便激光切割。
★入口/出口对中装置:一方面用于钢带宽度的自动测量;另一方面用于带头、带尾焊接前不错位,确保钢带的直线度。
★入口/出口提升装置:激光焊接合格后,钢带在理想的位置高速穿过该设备,从而保证该设备的稳定性和钢带的表面质量。
★打孔装置:将钢带激光焊接处打孔,作为标记。
★月牙剪:将不等宽的两卷钢带在焊接处剪切掉,使之圆滑过渡,不伤害下一工序的其他部件。
★主机:包括可以来回直线运动的C型架、焊缝检测装置、辅助动作的液压缸等;用于钢带的激光切割、焊接、焊缝检测功能。
2)液压站:由于该设备大多采用液压缸来实现相关动作,液压站为此提供动力源。
3)激光器:随C型架的来回移动,激光器为完成钢带带头、带尾的自动切割和焊接提供相应的激光功率。
4)操作台:通过HMI集中监控整台设备,具有手动、自动、监视、文档记录、报警等功能。
3、工艺简介
(图2)
1)带尾检测及移动:通过对带尾的两次检测配合出口夹送辊将带尾送到出口自动切割处;出口对中装置将带尾执行对中。
2)带头检测及移动:通过对带头的两次检测配合入口夹送辊将带头送到入口自动切割处;启动快速输入功能,对钢带宽度进行自动测量;然后运用入口对中装置将带头执行对中。
3)激光切割:当带尾、带头移动到相应位置时,根据要求将带尾、带头自动切割。
4)激光焊接:将切割合格后的带尾、带头进行自动拼接,然后根据要求
将带尾、带头自动焊接。
5)焊缝检测:将焊接后的钢带进行检测,判断是否合格,合格便通过出口夹送装置将钢带焊缝移动到打孔处打孔,作为焊缝标记;不合格自动将钢带切割,重复前面工作。
二、控制系统构成
(图3)
如图所示,控制系统核心控制器为SIMOTION D445,通过扩展CU320来实现完成11个伺服轴的控制,使用PROFIBUS DP作为通讯网络连接各部件,涉及的其他部件及功能如下:
1、伺服驱动和电机:选用SINAMICS S120书本型模块和1FT6伺服电
机,分别用于入口装置测量、对中;出口装置对中;焊缝拼接;C
型架;入口夹送装置;出口夹送装置。
使用SINAMICS驱动系统,
在控制上保证了同步和定位的精度。
2、人机界面:该设备配置了一个MP370 19”,实现集中控制、显示、
报警、归档、工艺配方等工作。
3、分布式I/O:配置SIMATAC ET200M模块,其中IM153-1和IM153-2
各一块,用于逻辑输入输出信号处理、模拟量信号处理。
4、轴扩展模块CU320:除了用于轴运动控制以外,还得实现入口/出
口夹送辊的全闭环控制、快速I/O测量等功能
三、控制系统完成的功能
1、使用CU320全局快速输入
项目中需要对钢带的宽度进行自动测量,我们使用了2个快速输入
功能,调试过程如下:
★在CU320的报文中选择SIEMENS telegram 392:从而激活6
个全局的快速测量功能,注意相对应的Input data。
(图4)
★在CU320的专家参数中,P680选择使用的快速输入点(如X122.8和X122.10),需要和TO_Measuring Input中设置的地址一一
对应。
(图5)
★在TO_Measuring Input中,Measuring_input_1 的HW address 和Bit number中分别输入521和1,设置快速测量输入点测量1(X122.8)。
(图6)
★同样的方法在Measuring_input_2 的HW address和Bit number中分别输如521和2,设置快速测量输入点测量2
(X122.10)。
★通过程序激活或不激活快速测量功能。
(图7)
2、同步功能
SIMOTION能实现定位轴的速度同步、多轴同步、相对和绝对的电子齿轮同步。
同步功能的实现首先是此轴在做轴配置时需激活同步
如:图8;其次时PLC程序中调用激活同步(_MC_CamIn)及取消
同步(_MC_GearOut)命令来完成。
根据工艺需要PLC程序可以随
时激活随时取消。
(图8)
3、编程
SIMOTION编程语言符合IEC61131-3标准,且包含I/O管理及过程
和机器控制所需的所有PLC命令。
程序可以用LAD(梯形图)、FBD
(功能结构图)、ST(结构文本)以及MCC(运动控制图)的形式
编制。
在此项目中主要采用的是LAD编程语言,涉及到的有增量
(_MC_MoveAdditive)、绝对(_MC_MoveAbsolute)、回零
(_MC_Home)、停止(_MC_Stop)、复位(_MC_Reset)、点动(_MC_Jog)、激活同步(_MC_CamIn)及取消同步(_MC_GearOut)等功能块,灵
活运用这些功能块,使整个项目具备了手动调试、自动运行功能。
在调用这些功能块时需要注意两点:
①、当同一个轴多次调用同一功能块时,不要同名,同名可能会导
致PLC程序不能重复循环。
②、调用功能块时EN端最好不要加条件,条件可以加在execute
端,如:
(图9)
四、项目运行
板带激光焊机与整条生产线经过上线调试,现已稳定运行。
各项技术指标达到了设计要求,焊缝断带率≤0.1%;拉力实验测试结果显示断裂都不发生在焊逢处。
生产节拍、焊接质量及整机稳定性均达到进口设备标准。
加上中文操作界面HMI,直观的动作指示、操作指南、报警提示、维修手册于一体,使设备更适应客户使用习惯,得到了客户的充分认可。
五、应用体会
本人一直以来都是从事数控系统的运用,有一定的运动控制基础,初次使用SIMOTION感觉还是比较容易上手的。
通过这台板带激光焊机的设计、调试,对SIMOTION有了较为深刻的理解,并掌握了SIMOTION的调试方法、应用范围、基本功能、编程技巧等。
跟SINUMERIK高档系统840D 比较,有可编程性强、操作方便、成本低、更适应生产线的优势。
冷轧工艺流程为:酸轧线:热轧卷—冷轧开卷机开卷—直头机直头—剪切头尾—焊机焊接—月牙剪切焊缝—进入口活套—破鳞机破鳞—酸洗槽—水洗槽—热风干燥—中间活套—月牙剪—圆盘剪—出口活套—进精轧机—测厚仪—卷取机卷取;退火线:酸轧卷—开卷机开卷—直头机—剪头尾—焊机焊接—月牙剪切焊缝—碱喷洗—碱刷洗—点解清洗—水刷洗—水喷洗—热风干燥—入口活套—退火炉预热—加热—均热—冷却—出口活套—平整机—圆盘剪—表面质量检查—静电涂油机—分切剪—卷取机;镀锌机组:酸轧卷或者退火卷—开卷机—直头机—切头剪—焊机—碱洗—水洗—入口活套—退火—锌锅—气刀—冷却塔—水淬槽—钝化处理—表面检查—静电涂油—分切剪—卷取机卷取。