徕卡CityMapper混合型城市航空摄影系统
LeicaADS40机载数字航空摄影测量系统
LeicaADS40机载数字航空摄影测量系统Leica ADS40 机载数字航空摄影测量系统徕卡测量系统于2001年率先推出了第一台大型推扫式航空摄影测量系统,全球目前有近百套这样的系统。
徕卡在此基础上推出两款新型镜头SH51·SH52用于ADS40系统。
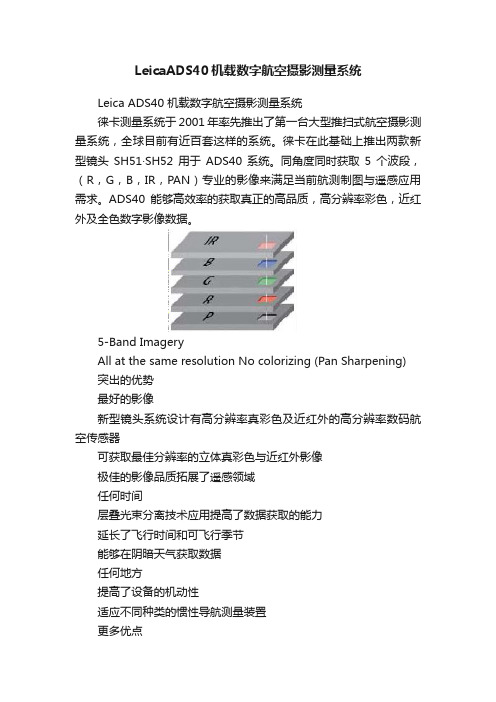
同角度同时获取5个波段,(R,G,B,IR,PAN)专业的影像来满足当前航测制图与遥感应用需求。
ADS40能够高效率的获取真正的高品质,高分辨率彩色,近红外及全色数字影像数据。
5-Band ImageryAll at the same resolution No colorizing (Pan Sharpening) 突出的优势最好的影像新型镜头系统设计有高分辨率真彩色及近红外的高分辨率数码航空传感器可获取最佳分辨率的立体真彩色与近红外影像极佳的影像品质拓展了遥感领域任何时间层叠光束分离技术应用提高了数据获取的能力延长了飞行时间和可飞行季节能够在阴暗天气获取数据任何地方提高了设备的机动性适应不同种类的惯性导航测量装置更多优点线阵推扫方式提高了彩色和近红外,全色正射影像和真正射影像产品的生产效率新型飞行控制管理系统(FCMS/FPES),保障航摄工作准确无误SH51·SH52两种传感器镜头系统的选择,提高了产品性价比特点可提供的影像产品有:(R,G,B,IR,Pan)正射和真正射影像SH51镜头可获取RGB真彩色和PAN全色立体成像SH52增加了IR近红外立体成像功能新传感器能够更好的采集多光谱数据,应用了最新的光束分离技术彩色传感器排列在同一视角进行成像同时获取相同分辨率5个波段数据,更加适合遥感应用新型镜头光学设计提高了4倍光线灵敏度,优于第一代传感器一次性完成所有波段数据几何纠正工作应用GPS精密单点定位技术,没有地面控制和参考站,依然能够执行高精度数据获取触摸屏操作控制,使飞行控制更简捷,更直观先进的摄影飞行自动控制管理系统FCMS新设计了飞行领航装置最好的航空传感器镜头系统ADS40采用单一大口径镜头设计,避免了多个小镜头影像拼接问题。
航空摄影测量-技术流程
嘉鱼市国土资源局航空摄影测量及DEM、DOM、DLG生产项目技术文件[航空摄影部分]武大吉奥信息技术有限公司2009年10月目录1 航摄技术文件 (3)1.1技术说明 (3)1.1.1 含惯导的ADS40技术路线 (3)1.1.2 不含惯导的DMC技术路线 (5)1.1.3 传统彩色胶片相机技术路线 (7)1.1.4 作业流程 (8)1.2技术方案 (9)1.2.1 主要工作内容 (9)1.2.2 技术依据 (9)1.2.3 测区概况 (10)1.2.4 成图规格 (13)1.2.5 航空摄影 (13)1航摄技术文件1.1技术说明1.1.1含惯导的ADS40技术路线ADS40是由全球著名的摄影测量公司徕卡公司开发的线阵列推扫式摄影系统,它高度集成了高精度全球定位系统(GPS)和惯性测量单元(IMU),其中高精度全球定位系统与地面基站GPS或精密星历数据联合解算后能够以2HZ频率提供高精度绝对坐标,具有长时低频高精度特点;惯性测量单元能够以200HZ频率记录航摄仪相对位置和高精度姿态数据,具有短时高频高精度的特点,两者紧密集成能够有效补偿彼此的系统误差,利用ADS40进行航空摄影,可以为每条扫描线产生准确的外方位元素。
而利用摄影测量技术成图的关键技术是如何获取精确的影像外方位元素以恢复摄影时的立体状态,使用ADS40航摄系统进行航摄,一方面可以直接获取高清晰、高品质、高分辨率、多光谱数字航摄影像,另一方面能够获取每一条扫描影像的外方位元素,这样在影像后处理过程中只需结合精密卫星星历或GPS同步观测数据就能够得到准确的外方位元素,从而恢复整条航带摄影时的立体构像;空三加密处理时只需要在加密分区四角和中心加测像片控制点就可以保证影像空三加密精度,大大减少外业像控点数量,同时ADS40基高比较大,高程量测精度高,也可以成倍地减少外业高程控制点测量工作,有效缩短成图周期。
4采用ADS40实施航摄的总体技术步骤包括资料收集和空域申请、POS 辅助航空摄影、像片控制测量、航摄内业四个部分。
徕卡相机不同价位有哪些选择
徕卡相机不同价位有哪些选择作为摄影爱好者,我们自然更希望徕卡能够在数码时代中发挥出更好的风采,源自德国的严谨和精良的做工,一直以来都是人们追逐的焦点。
下面是小编为大家精心推荐徕卡相机各个价位的选择,希望能够对您有所帮助。
徕卡相机3000-5000元价位的选择徕卡D-lux6这款数码相机搭载3.8倍光学变焦防抖镜头,拥有1010万像素的高画质表现,感光度最高可设为ISO 12800。
此外,该相机还采用了全新设计的COMS以及图像处理引擎,拥有F1.4超大光圈,可带来更好的背景虚化效果。
同时,相机还可支持AVCHD Lite格式长时间摄像,并可用HDMI输出视频及音频。
徕卡相机5000-10000元价位的选择徕卡V-Lux徕卡V-Lux外形与单反造型类似,内置OLED电子取景器和1英寸图像传感器,背面是3英寸的可翻转LCD取景器。
机身内置Wi-Fi 功能,最高连拍速度可达到12fps。
同时,该相机具备4K录像功能,可以高于全高清4倍的高分辨率录制影像。
徕卡V-Lux4这是一款经典的长焦相机,采用1410万有效像素,并搭载1/2.3英寸的CMOS传感器,可以拍摄最大分辨率为4000×3000像素的照片,并可拍摄1080p全高清短片。
同时,该相机还搭载一块3英寸46万像素的TFT液晶显示屏,而且屏幕可以任意旋转,提供100%的视野率。
徕卡D-Lux Typ 109这款数码相机首次采用了4/3传感器的徕卡D-Lux系列机型,搭配Vario-Summilux 10.9–34mm f/1.7–2.8 ASPH镜头,等效焦距为24-75mm。
另外,该相机的最高感光度为ISO 25600,快门速度范围60-1/16000秒,且最高连拍速度实现了11张每秒的目标值,内置NFC、Wi-Fi功能,可通过智能手机或平板电脑进行传输或者远程操控。
徕卡C这是一款徕卡的卡片机,内置7米范围的闪光灯,正常感光度范围在ISO 80-12800,内部搭载1/1.7英寸1210万像素传感器,搭配20万像素电子取景器。
dmc航空摄影相机技术参数

dmc航空摄影相机技术参数
DMC航空摄影相机是一种高性能、高分辨率的航空摄影设备,其技术参数如下:
1.分辨率:该相机采用高分辨率的 CCD 感光芯片,在最高分辨率模式下可以达到 10000x8000 像素的分辨率,能够捕捉到细节非常丰富的图像。
2.动态范围:DMC航空摄影相机的动态范围非常广,可以达到 11 档,能够捕捉到极高的光线反差场景下的细节。
3.光学系统:该相机采用高品质的镜头系统,具有高清晰度、低畸变、低色散等特点,能够提供出色的成像效果。
4.快门速度:DMC航空摄影相机的快门速度非常快,可以达到
1/4000 秒的高速快门,能够捕捉到高速运动的物体。
5.感光度:该相机的感光度范围广,可以在 ISO 50 至 ISO 6400 的范围内进行调节,能够适应各种光线条件下的拍摄需求。
6.存储媒介:DMC航空摄影相机支持多种存储媒介,包括 CF 卡、SD 卡等,能够满足不同的存储需求。
7.重量和尺寸:相机非常轻便和紧凑,重量仅为 1.5kg 左右,尺寸为 200x120x100mm,非常适合航拍等特殊场景的使用。
- 1 -。
徕卡ADS40_ADS80数字航空摄影测量系统

准面是指该国家或地区的平均海平面, 并非真实的 大地水准面。随着 GPS定位技术的广泛应用, 精化 区域大地水准面已成为建立 现代国家高程基 准的 重要任务。
近年来, 欧美一些发达国家先后研制和推出了 新一代 (似 ) 大地水准面模型, 我国也在抓紧建立自 己的高精度大地 水准面模型。高精度局部大 地水 准面为测绘学、地球 物理、地球 动力学及海洋 学等 相关学科的发展和应用提供 了重要的基础地 球空 间信息。 GPS技术结合高精度大地水准面模型能够 取代传统的高程测量 ( 如三角高程测量和低等级水 准测量 ); 集成 POS的摄影测量中, 应用大地水准面 精化模型则可提高摄影测量的高程精度。
地心空间直 角坐标系
一级影像栅 格坐标系
二级影像栅 格坐标系
P - EN 投影坐标系
用途
零级 影像栅 格坐标 与摄 影 测量 坐标系关联基础 以摄影 中心 为原 点的 坐 标系 即摄 影 测 量 坐 标 系, 是 共 线方 程 的 基 础 坐 标 系, 同 时也 是空三 解算的 基础 坐 标系 ; 一 级 影 像 与 空 三 解 算的 切面空 间直角 坐标 系 原点 不同
截至 2009年 6月底, 国内已有多家单位购买了 十几套 ADS40 /ADS80系统, 并在测绘、规划、国土、 铁路、水利等行业得到了很好的应用。特别是采用
GPS精密单点定位技术 ( PPP ) 进行无 GPS基站飞行 作业后, 使用 ADS系统无需进行外业控制测量就可 以直接进行加密和测图, 不仅大大减少了外业控制 测量工作及成本, 更 可以提高工作效 率, 缩短 成图 周期。
W GS-84和 地方 坐标 系变换 使用 7 个转 换参 数: 3个平移参数、3个旋转参数和 1个尺度参数, 使 用的模型为 Bursa模型。
UltraCam系列航空摄影测量相机介绍
概述.................................................................................................................................................... 25 UltraCamL 特性 ................................................................................................................................ 26 UltraCamL 技术参数......................................................................................................................... 26 UltraCamL 影像产品展示................................................................................................................. 29
UltraCamXp WA (wide-angle) 广角大幅面数码航摄仪 .................................................................. 20
概述.................................................................................................................................................... 20 UltraCamXp WA ............................................................................................................................... 21 特性.................................................................................................................................................... 21 UltraCamXp WA 技术参数............................................................................................................... 21 UltraCamXp WA 影像产品展示....................................................................................................... 24
徕卡ADS80机载数字摄影测量系统

Leica ADS80徕卡数码航空相机系统数据获取电子技术参数光谱范围及滤波参数徕卡测量系统最新的线阵航空摄影技术及工作流程提供了最优化的航空影像获取及数据处理手段。
徕卡测量系统ADS80数码航空相机系统能得到最佳成果。
CCD 数字化:12比特A/D 数模转换分辨率:16比特数据通道:16比特敏感度:SH40的四倍数据模式:ADS80数据格式,低压缩,原始数据数据压缩比率:~2.5x 至~3.6x 数据分布模式:非线性压缩数据的辐射分辨率:10比特以及12比特每条线记录频率(周期时间):≥1ms光谱范围:全色,RGB ,近红外光谱波长:光谱波长λ全色(梯形) 465-676(阈值λ=50%)红色(直方形) 608-664绿色(直方形) 533-587蓝色(直方形) 428-492近红外(直方形) 833-887新型徕卡ADS80数码航空相机系统是您最好的投资目标。
徕卡测量系统的最先进的线阵扫描科技在数据获取和数据处理方面给您带来优于所有大面阵框幅式数码相机的效益。
徕卡ADS80带来更好的机遇最好的投资、最好的影像、最新的空间信息简单 – 从飞行计划制定到数据成果输出灵活– 应用于航空摄影或遥感各个领域高效 – 最快速的工作流程经济 – 高度集成的系统可靠 – 徕卡测量系统提供了完整航空摄影测量及遥感解决方案徕卡ADS80是世界上唯一提供子像元级别精度数据的宽幅数字航空摄影系统。
他独特的光学设计在数据获取中提供了以下优势:更优的数据子像元级别的精度数据从蓝色波段到红外波段全色、彩色和彩红外数据保持完全相同投影角度, 甚至在小于5cm 地面分辨 率的情况下 无需小波融合处理即使在较差的飞行条件下,也能保证最优化的几何稳定性徕A DS80配备全新的CU80控制系统,提供以下优势: 全新设计的数据闪存设备更轻、更可靠增强的数据吞吐能力保证同时获取航空摄影数据以及遥感波段数据改进的图像数据压缩技术可以提供更好影像质量徕卡航摄系统的线阵技术在空间数据获取领域中已经成为了标准化流程。
ADS100的技术特点和优势-111

具有相移补偿功能
高精度惯性测量系统 使用单一大孔径焦阑镜头
准确的光谱信息
先进的层叠光束分离技术 可以有效避免地面和水体反光
.9.
采用单一主光轴设计
ADS100系统采用单一主光轴设计,IMU的理论中心与系统主光轴一 致,偏心误差极小。 系统平台具有高度的几何稳定性,保证了影像的几何精度。 温度控制装置保证系统可在环境温度-20~45℃间正常工作。
.18.
可以有效避免地面和水体反光
ADS100的推扫式三线阵影像获取技术,可以在同一地点同时获取 三个不同角度的影像,并可在后期数据处理时采用叠加镶嵌的方法 避开因地面或水体反光在影像上形成的反光点或反光条带,也可避 开航摄飞机自身的阴影。
前视 Forward view 底视 Nadir view 后视 Backward view
.19.
多重立体多元化影像产品
ADS100可同时获取17.7°、25.6°、43.3°三个角度100%重叠的 连续条带影像,其彩色影像可分别构成“前视-底视、前视-后视、 后视-底视”等三重立体,若采用多重立体匹配技术,可有效剔除 粗差,提高影像匹配精度。
RGB 彩色影像产品 正射影像和彩色立体测图
反向180度进入下条航线时显示推荐飞行路线
North-up view
Nose-up view
In-line view
.25.
FlightPro飞行控制管理系统
可通过多种界面进行控制
操作员和飞行员可显示不同页面
可锁定界面以防误操作
OC60 显示器
GI40 导航指示器
.26.
Leica XPro数据后处理程序 快速空三加密
11 徕卡TPS和GPS联合监测系统介绍 2

徕卡测量系统贸易(北京)有限公司
哪些需要监测
滑坡 基坑 矿山 隧道 建筑 大坝 桥梁 公路、铁路及周边区域 沉降区域 地壳变形区域
2
…
变形监测仪器 — TPS
TPS是目前国内变形监测的常用仪器之一,采用TPS进行监测有如下 优点:
远程控制系统
变形监测控制 - GPS
GMX902 Zenith25 GRX1200
目前可以连接的仪器类型 今后根据需要继续添加
13
远程控制系统
气象仪连接
目前仅可连接徕卡气象传感器; 气象仪采集的数据将直接用于测距改正; 每一个测量循环采集一次气象数据; 将来可以拓展连接其他气象传感器。
15
远程控制系统
监测循环操控 - GPS
设置开始时间和结束时间后系统自动按照设置的时间进行变形监测; 系统根据设置的处理间隔自动进行基线解算和变形分析; 监测控制均对所有的GPS同时进行。
16
远程控制系统
测点列表和数据查询
对项目中的监测点进行 查询操作。
17
远程控制系统
变形监测数据 数据查询
5
TPS和GPS联合监测的系统构成
装有机载软件
装有控制软件
6
TPS机载监测软件功能特点
按照国家相关测量规范进行多个方向,多个测回的连续测量,适合精密的控制或监 测项目中;
丰富的限差检测,保证最终的测量结果符合要求; 学习测量列表可以导入、导出,并可以添加、删除目标点,方便外业的监测测量; 监测数据可以在仪器上直接查看,亦可以通过多种数据输出,方便后处理程序进行 分析处理; 最终的测量结果自动存储在仪器内部,且可以通过端口输出到远程控制系统。
徕卡ads80介绍

Leica AD S80 机载数字航空摄影测量系 统是目前最先进的推扫式机载数字 航空 摄影 测量 系统。AD S8 0集成了高精度的 惯性导航定向系统 ( IMU )和全球卫星定位 系统 ( GPS ), 采用 12000像元的三线阵 ( S H 81 型号相机 有 11 条、 S H 82 型 号 相机有 12条 ) CCD 扫描和 专业的单一 大 孔径焦阑 ( 远心 ) 镜头, 一次飞行就可 以同时获 取前视、底点和后视的具有 100 % 三度重叠、连续无缝的。具有相同影像 分辨率和良好光谱特性的全色立体影像 以 及彩色影像和彩红外影像。
在 AD S80 S H 82 相 机 的 1 2 条 CCD 中, 每 条 CCD 为 12 000 像元, 像元 大小 6 . 5 μm, 按 照前 视( 2 7° ) 、 底视 ( 0°) 、 后视 ( 1 4° ) 分为三 组排列, 前视组包括一条单独的全色 CCD , 底视组 包括一对相错半个像 素全 色 CCD 和 红、 绿、 蓝、 近 红 外等 各 一 条CCD , 后视 组包括一 条单独的 全色 CCD 和红、 绿、蓝、 近红外等各一条 CCD 。
2.高质量的数据成果
徕卡ADS80是目前世界上唯一提供子像元级别 精度数据的宽幅数字航空摄影系统,子像元级 别的精度数据从蓝色波段到红外波段,它独特 的光学设计在数据获取方面具有以下特征: 全色 彩色和彩红外数据保持完全相同角度,甚至在 小于5cm地面分辨率的情况下无需小波融合处 理,即使在较的飞行条件下,也能保证最优化 的几何稳定性 其控制系统具备以下优势: 新设 计的数据闪存设备重量更轻,且具备优良的稳 定性; 增强的数据吞吐能力保证同时获取航空摄 影测量数据以及遥感波段数据; 改进的图像数据 压缩技术可以提供更好的影像质量。
浅析徕卡ADS80数字航空摄影测量系统

浅析徕卡ADS80数字航空摄影测量系统作者:曹曦来源:《华夏地理中文版》2016年第05期摘要:文章介绍徕卡ADS80数字航空摄影测量系统的组成及特点,对数字影像数据后处理方面的技术内容,包括空中三角测量,数字高程模型的建立,数字正射影像生成等制作流程做了简要阐述。
关键词:ADS80;测量;DEM;DOM经济社会的快速发展对地理测绘信息产业提出了更高的要求,如何快速高效地获取地理影像资料,以及地理信息数据及时更新是地理测绘信息产业服务社会发展的保证。
基于传统单模型测图技术虽然也相当成熟,不过其需要较繁重的航测外业工作。
随着ADS80数码航空摄影系统的出现以及数码摄影测量技术的日渐成熟,这些问题得到了根本性的解决,文章将介绍徕卡ADS80数字航空摄影测量系统,以及数字影像数据后处理方面的技术内容。
一、徕卡ADS80系统及特点ADS80系统机载数字航空摄影测量系统目前最先进的推扫式机载数字航空摄影测量系统。
徕卡ADS80系统集成了惯性导航定向系统和全球卫星定位系统,其采用了12000像元的三线阵CCD扫描以及专业的单一大孔径焦阑(远心)镜头,通过一次飞行就可以获取包括前视、底点以及后视的三度重叠、连续无缝的、具有相同影像分辨率,徕卡ADS80系统可以呈现良好光谱特性的全色立体影像以及彩色影像和彩红外影像。
徕卡ADS80相机系统的基本参数如下:例如IMU型号Ring-laser gyro相机的频率为200Hz;焦距为62.77mm;CCD像素大小为6.5um,全色波段线阵为2×12000像素(交叉);RGB和NIR波段线阵的像素为12000像素,FOV视场角为64°,前视方向与底点夹角为27°,底点与后视方向夹角为14°,前视方向与后视方向夹角为41°。
二、数字影像数据后处理(一)解析空中三角测量目前ADS80数据处理软件主要是徕卡公司的Xpro,平差模块Orima己内嵌于其中,不需单独调用。
徕卡 gps1200系列高性能gnss系统 说明书

操作者可以在 GPS 和 TPS 之间 进行快速切换,并且无论使用 哪一个设备都是非常方便、适 合。不需要再进行额外的培训。
完全通用性
GPS1200 可以被用作基准站或者 流动站,并适用于从静态到 RTK 的 任何工作模式。体积小、重量轻, 并支持所有的数据格式和通讯设 备,可使用对中杆、背包、三角架 进行工作,甚至可以用在施工机 械、测量船或飞行器上。
满足各种应用
你可以用 GPS1200 做任何事情: 控制测量、地形测量、工程测量、 地籍测量、放样测量、变形监 测、地震测量——用在任何你需要 的地方。
SmartRover - 极轻的重量
SmartRover 的重量(所有的设备全 部安置在对中杆上)仅仅有 2.8 kg, 并且整个流动站没有任何电缆。舒 适的完成一整天的工作,充分的享 受与SmartStation 完美的兼容性。
完全防水、坚固耐用
GPS1200 接收机针对任何可能的 恶劣环境下工作的特性而设计的。 它可以浮于水面,抗跌落、摇晃和 振动,可以在雨、尘、沙暴和雪天 等各种恶劣条件下操作,其工作温 度为-40℃~+65℃。
无缝数据流
键盘照明
在夜间工作的时候,可以切换到 显示和键盘照明状态。所有的按 键都将变亮。
使用 GPS1200 做每件事情
● RTK,DGPS ● 静态数据存储 ● 用作流动站或者参考站 ● 架设在对中杆、三角架、仪器
墩或全部放入背包中作业 ● 安装在施工机械、测量船或飞
机上 ● 满足各种类型应用的需要
机载Lidar提取的高程信息在地形图中的应用
机载Lidar提取的高程信息在地形图中的应用摘要:随着地形图在国民经济和社会发展的作用日益显著,相比传统的地形图测绘的方式,机载LiDAR技术具有精确、快速、直接获取大范围高精度三维信息的特点。
本文阐述了采用机载LiDAR技术,通过对获取的点云数据进行处理,提取高程信息,将其应用于地形图当中,最后应用相关技术验证这种模式可行性以及可靠性。
关键词:机载激光点云,地形图测量,高程信息0 引言随着我国社会经济的发展,地形图成果在国民经济和社会发展中起着重要作用。
在传统地形图测量中,在一些地势变化较大的区域,如何在保证精度的前提下快速提取地形图的高程信息就成为要解决的问题[1]。
机载LiDAR技术能够快速采集地表点,自动获取高精度的地面点三维坐标数据,根据采集点云可以生成的数字高程模型DEM和数字地表模型DSM,利用生成的模型可以提取高程信息,应用于地形图测绘[2]。
本文利用机载激光点云数据,提取高程信息,通过对比实测高程和提取的高程,来探究机载LiDAR在地形图测图中应用的优势。
1 基于LiDAR数据的点云数据采集与处理LiDAR系统集成全球定位技术、惯性导航技术、激光测距技术,快速采集地表点的摄影测量装置,机载 LiDAR技术能够快速采集地表点。
LiDAR数据采集与处理主要包括:航空摄影、检查点量测、点云数据预处理、点云自动分类、点云人工分类、点云成果输出。
1.1项目概况项目区域选取在地势变化较大,高程信息提取困难的山地区域。
项目采用机载LiDAR摄影测量技术进行测绘产品生产。
机载激光测量系统为徕卡公司的CityMapper-2S;CityMapper-2S是徕卡旗下第二代航空机载混合测量系统,集成倾斜相机和LiDAR系统。
项目使用得点云处理软件为煤航自主研发的LiDAR-DP软件。
1.2技术方案1.2.1点云数据的获取点云数据获取主要包括:准备阶段、检查点测量、航飞阶段、数据解算输出。
①准备阶段主要包括测区范围的确定和参数的确定。
CityMapper倾斜航空摄影与激光雷达集成系统初探

C i t y M a p pe r 倾斜航空摄影与激光雷达集成系统初探贾延青1,陈洁2(1.北京星天地信息科技有限公司,北京 102299;2.中国自然资源航空物探遥感中心,北京 100083)摘 要: 实景中国 的顶层设计对航空遥感技术体系的构建提出了更高要求,集成了倾斜摄影与机载L i D A R 的混合型航空摄影系统C i t y M a p p e r 实现了航空遥感领域的技术革新,充分发挥了倾斜航空摄影多角度刻画地物纹理和机载L i D A R 主动式㊁高精度地获取地物高程的优势,一次拍摄即可建立精细化的地面三维实景模型㊂本文着重介绍了C i t y M a p pe r 系统的部件组成与技术特点及其应用情况,为后续自然资源监测与地质调查研究提供了科学参考㊂关键词:倾斜航空摄影;机载激光雷达;S P A N 定位定向;空中多脉冲中图分类号:P 23;P 631 文献标识码:A 文章编号:1009282X (2023)03001604A P r e l i m i n a r y S t u d y o n t h e I n t e g r a t e d S y s t e m o f O b l i q u e A e r i a l P h o t o g r a p h y an d L i d a r J I A Y a n q i n g 1C H E N J i e 21 B e i j i n g X i n t i a n d i I n f o r m a t i o n T e c h n o l o g y C o L t d B e i j i n g 102299 C h i n a 2 C h i n a A e r o G e o p h y s i c a l S u r v e y &R e m o t e S e n s i n g C e n t e r f o r N a t u r a l R e s o u r c e s B e i j i n g 100083 C h i n a A b s t r a c t T h e t o p -l e v e l d e s i g n o f R e a l C h i n a p u t s f o r w a r d h i g h e r r e q u i r e m e n t s f o r t h e c o n s t r u c t i o n o f a e r i a l r e m o t e s e n s i n gt e c h n o l o g y s y s t e m C i t y M a p p e r a h y b r i d a e r i a l p h o t o g r a p h y s y s t e m t h a t i n t e g r a t e s o b l i q u e p h o t o g r a p h ya n d a i rb o r n e L i D A R h a s ac h i e v ed te c h n o l o g i c a l i n n o v a t i o n i n t h ef i e l d o f a e r i a l r e m o t e s e n s i ngh a s t h e a d v a n t a g e s o f o b li q u e a e r i a l p h o t o g r a p h yi n d e p i c t i n g t h e t e x t u r e o f g r o u n d o b j e c t s f r o m m u l t i p l e a n g l e s a n d t h e a c t i v e h i g h -p r e c i s i o n a c q u i s i t i o n o f g r o u n d o b je c t e l e v a t i o n b y ai r b o r n e L i D A R a r e f i n e d g r o u n d 3D r e a l i s t i c m o d e l c a n b e e s t a b l i s h e d i n j u s t o n e s h o t T h i s a r t i c l e f o c u s e s o n t h e c o m p o n e n t s t e c h n i c a l c h a r a c t e r i s t i c s a n d a p p l i c a t i o n o f C i t y M a p p e r s y s t e m w h i c h p r o v i d e s a s c i e n t i f i c r e f e r e n c e f o r s u b s e q u e n t n a t u r a l r e s o u r c e m o n i t o r i n g a n d g e o l o g i c a l s u r v e yr e s e a r c h K e yw o r d s o b l i q u e a e r i a l p h o t o g r a p h y l i d a r S P A N p o s i t i o n i n g a n d o r i e n t a t i o n M P i A 收稿日期:20220725作者简介:贾延青(1980-),男,硕士研究生,测绘工程专业,工程师,主要从事航空遥感新技术研究与应用等有关工作,E -m a i l :6590960@q q.c o m ㊂0 引言相较于传统的以下视为主的航空遥感手段,倾斜摄影可以复现地物的侧面纹理,对城市建筑密集㊁山体植被茂密㊁高差变化剧烈等困难地区依然具有较好的表现效果[1],但存在模型边角模糊和纹理遮盖现象等不足[2]㊂机载L i D A R 是一种主动式㊁全天候㊁穿透力强的航空遥感技术,获取的点云数据可生成高精度地表高程模型(d i gi t a l e l e v a t i o n m o d e l ,D E M )[3]㊂将上述两种技术手段进行集成,可一次性获取倾斜影像㊁多波段下视影像㊁三维激光数据,地物要素信息更全面,建模速度更快,精度更高㊂得到的二维及三维地理空间数据成果,不但可为自然资源调查㊁城市规划㊁地质勘探等领域提供精准的底图资料,还可为国情普查㊁应急救灾等提供可靠的技术支撑[4]㊂C i t y M a p p e r 混合航空摄影系统(下文简称 C i t y M a p p e r 系统 )集成了1.5亿像素的航空摄影相机和2MH z 激光雷达单元,具备无测距盲区的多脉冲㊁机械式相移补偿和低失真镜头工艺等技术,能在地物密集区高效获取高分辨率影像和无遮挡高密度点云㊂配套的H x M a p 后处理软件支持多节点并行运算,实现了快速质检㊁自动检校和成果输出㊂生产正射影像与三维点云的同时,可联合倾斜影像和激光点云进行三维建模㊁单体化等,做到了一次测量㊁多重应用,使得数据价值得到充分体现[5]㊂1 系统组成C i t y M a p pe r 系统主要由传感器镜筒(含倾斜相机㊁激光雷达单元)㊁重载型升降支架㊁陀螺稳定平台㊁飞控终端等部件构成,如图1所示㊂此外,系统还包含1套多传感器软件平台㊂图1 系统主要部件F i g .1 S y s t e m m a i n c o m po n e n t s 1.1 倾斜摄影相机C i t y M a p p e r 系统的倾斜摄影相机由2个下视镜头和4个倾斜镜头组成,其中下视镜头包含1个可见光R G B 谱段和1个近红外N I R 谱段影像传感器,4个可见光R G B 谱段倾斜相机以45ʎ旁向视角固定在镜筒上获取地物目标影像,其航向视角可达26.8ʎ,拍摄的最小拍摄间隔为0.9s㊂根据应用需求的不同,相机镜头焦距可选择71m m ㊁112m m ㊁146m m ㊁189m m 等多种组合,从而确保在不同的飞行高度均可获得相同地面分辨率的影像成果㊂相机的主要技术参数如表1所示㊂表1 C i t y M a p pe r 系统倾斜摄影相机主要技术指标T a b l e 1 T h e m a i n t e c h n i c a l i n d i c a t o r s of t i l t c a m e r a i nC i t y M a p p e r S ys t e m 像幅大小14192ˑ10640像元大小/μm 3.76最小拍摄间隔/s 0.9最高快门速度/s 1/1000光敏元件背照式C M O S 动态范围/d B0~83像移补偿机械式该镜头的优势与特点有:0.9s 的最小拍摄间隔使得航空摄影过程中飞行速度显著提升,大幅地提高了作业效率;背照式C M O S 使得相机具有更敏感的光线感应能力,在太阳高度角较低或光线较暗的气象条件下能够清晰捕捉地物细部信息,增加了作业时间;定制的航空级光学镜头,具有更高的透光率和成像素质,使得影像表现更加锐利㊂1.2 激光雷达单元内置L e i c a H y pe r i o n 2激光雷达单元,采用倾斜扫描方式,视场角为20ʎ~40ʎ,扫描速度为每秒120~300线,发射激光波长为1064n m ,激光发散度为0.23m r a d ,最大脉冲频率可达2MH z,具有全波形记录㊁实时波形分析与提取㊁目标模糊度解算㊁无测距限制等回波脉冲处理技术,能够在5500m作业高度的范围内获取具有5c m 和13c m 的垂直和水平精度的点云数据㊂1.3 升降支架为了便于集成了倾斜相机与激光雷达单元的镜筒安装,系统搭载了能够适用于固定翼㊁旋翼等不同平台㊁不同型号飞行器的P o d L i f t e r 升降支架㊂根据项目所适用的具体机型㊁开孔尺寸及深度,通过液压装置灵活地调整仪器出露高度,确保设备安全的情况下最大限度地避免各个传感器视场角不被遮挡㊂1.4 陀螺稳定平台数据获取瞬间航空遥感系统的稳定性直接决定了成果质量的优劣,P A V 100陀螺稳定平台能够根据传感器的实时姿态在空间方向上提供角度补偿,始终保持设备水平,针对不同的传感器与惯性导航单元提供全自动漂移控制以及倾斜和旋转补偿[6]㊂R o l l ㊁P i t c h ㊁H e a d i n g 的补偿范围分别为ʃ7ʎ㊁ʃ6ʎ和ʃ30ʎ,提供的补偿中误差优于0.02ʎ㊂1.5 飞控终端飞控终端主要包括航空遥感设备操作员控制终端与飞行员导航与显示终端㊂前者主要提供机上设备的参数设置㊁航线选择㊁系统状态监测等功能;后者主要提供飞行过程中的导航基础数据,如飞行高度㊁航线端点位置㊁巡航速度等㊂1.6 多传感器软件平台基于多传感器格式兼容㊁海量数据融合计算的数据处理需求,H x M a p 提供了快速㊁直观的数据处理平台,可在统一的交互界面下完成不同类别航空遥感成果的生产㊂它将数据获取与后处理流程紧密结合,在输入原始数据后即可开展质检和数据管理等工作流程[7]㊂还可根据用户的应用需求,定制可扩展的功能模块配置包,例如:R e a l W o r d 配置包可用于大范围航空影像项目,R e a l T e r r a i n 配置包主要用于大面积L i D A R成图,R e a l C i t y配置包可进行智慧城市以及三维城市建模㊂H x M a p是通用的高性能处理工作流系统,适用于徕卡所有机载传感器㊂该软件具备在同一用户界面中处理影像和激光雷达数据的能力,降低了处理不同传感器数据的要求与成本㊂2主要技术特点2.1S P A N定位定向技术S P A N技术集合了全球定位系统(G N S S)和惯性导航单元(I M U)两种技术手段,将两者的技术优势互为补充㊂全球定位系统定位的绝对精度加上惯性导航单元陀螺和加速计测量的稳定性就可以提供位置㊁速度和姿态解算结果,克服了全球定位系统信号被遮挡时,其解算的结果不连续的不足[8]㊂C i t y M a p p e r系统在飞行过程中以2H z获取原始G N S S位置数据,I M U以500H z记录相对位置数据和测量飞行平台实时姿态,并回传给P A V100稳定陀螺平台进行姿态修正;通过对G N S S数据进行差分或精确单点定位(p e r c i s e p o i n t p o s i t i o n i n g, P P P)后处理,并与I M U数据进行融合,获取可靠有效的位置与姿态数据,即初始外方位元素㊂2.2精确单点定位(P P P)精确单点定位采用精密卫星轨道数据和卫星时钟纠正数据,在无地面基站的情况下计算精密的动态定位信息[9]㊂该技术提供了高精度解算G N S S 和I M U数据的全新解决方案,非常适用于山区㊁沙漠㊁戈壁等不易架设基站地区㊂其所利用的高精度星历数据可在飞行结束后14天获取,低精度星历数据在飞行结束后17小时后即可在线下载[10-11]㊂2.3空中多脉冲(M P i A)技术传统的空中单脉冲(s i n g l e-p u l s e i n a i r,S P i A)技术只有在接收机获取激光信号后才能进行下一次发射,使得两次发射间的时间段内没有激光点云数据获取㊂如果地形起伏大㊁飞行速度快,就会造成点云成果稀疏甚至产生漏洞㊂空中多脉冲(m u l t i-p u l s e i n a i r,M P i A)技术允许在收到前一个脉冲的反射之前发射下一个激光脉冲,能大大提高点云密度和工作效率,快速获取高精度数字高程模型成果[12]㊂与光学或数字影像结合使用,加上少量地面控制点,即可获取高精度正射影像产品[13]㊂3应用情况自然资源调查监测是以空间信息㊁人工智能㊁大数据等先进技术手段,构建高效的调查监测体系[14]㊂在内蒙古五原县㊁乌拉特中旗和乌拉特前旗部分区域内,利用C i t y M a p p e r系统获取了优于0.2m地面分辨率的倾斜影像数据和大于2p p s的L i D A R点云数据㊂基于此制作了该工作区内的城镇㊁农区㊁半农半牧和黄河流域附近的地形级实景三维地理场景数据,为国土空间规划㊁土地整治㊁新型基础测绘㊁精细化城市管理㊁自然资源三维立体时空数据库建设㊁实景三维中国建设等提供三维立体时空数据支撑,进一步丰富了该工作区内的自然资源调查监测体系建设㊂4结语随着航空遥感技术的不断进步和新技术手段的不断涌现,将会有更多的传感器被集成在一起,以便在一次飞行过程中获取尽可能多的成果数据,根据行业应用所需提供不同的成果图件[15]㊂C i t y M a p p e r航空遥感集成系统的出现打破了传统的遥感信息获取模式,实现了跨传感器数据的互联互通,推动了未来集成航摄系统的创新性与创造力,为后续集成系统的研发与应用提供了参考意义㊂参考文献(R e f e r e n c e s):[1]陈洁,蔡君,李京.A M C5100倾斜航空遥感系统及其在地质行业的应用[J].地质装备,2020,21(4):3034,48.C H E N J i e,C A I J u n,L I J i n g.A M C5100o b l i q u e a e r i a lr e m o t e s e n s i n g s y s t e m a n d i t s a p p l i c a t i o n i n g e o l o g i c a li n d u s t r y[J].E q u i p m e n t f o r G e o t e c h n i c a l E n g i n e e r i n g,2020,21(4):3034,48.[2]杨明军,康冰锋,韩丹.基于L i D A R和倾斜摄影测量技术的实景三维自动化建模方法[J].科技资讯, 2018,16(33):9396.Y A N G M i n g j u n,K A N G B i n g f e n g,H A N D a n.A3Da u t o m a t i c m o d e l i n g m e t h o db a s e d o n L i D A R a n d t i l tp h o t o g r a m m e t r y[J].S c i e n c e&T e c h n o l o g y I n f o r m a t i o n, 2018,16(33):9396.[3]王云凯,蒋毅,何燕兰,等.机载L i D A R与倾斜摄影技术融合在美丽乡村建设中的应用研究[J].测绘通报,2021(S1):3741.W A N G Y u n k a i,J I A N G Y i,H E Y a n l a n,e t a l.T h ea p p l i c a t i o n o f a i rb o r n e L i D A R a n d i nc l i n a t i o np h o t o g r a p h y i n b e a u t i f u l r u r a l c o n s t r u c t i o n[J].B u l l e t i n o f S u r v e y i n g a n d M a p p i n g,2021(S1):3741.[4]边涛.基于三维的新型基础测绘实体采集方法[J].中国科技信息,2021(16):101102.B I A N T a o.N e w E n t i t y A c q u i s i t i o n M e t h o d o f b a s i c s u r v e y i n g a n d m a p p i n g b a s e d o n3D[J].C h i n a S c i e n c ea n d T e c h n o l o g y I n f o r m a t i o n,2021(16):101102.[5] K e i t h A l b e r t s o n.C i t y M a p p e r-2c a p t u r e s d e t a i l e da i rb o r n e d a t a a n d i m a g e s[J].I S E;I n d u s t r i a l a n d S y s t e m s E n g i n e e r i n g a t W o r k,2021,53(5):5657.[6]商振伟.P A V100陀螺稳定座架的安装使用及高频振动处理[J].江西测绘,2019(1):3032.S H A N G Z h e n w e i.I n s t a l l a t i o n a n d u s e o f P A V100 g y r o-s t a b i l i z e d m o u n t a n d h i g h f r e q u e n c y v i b r a t i o n p r o c e s s i n g[J].J I A N G X I C E H U I,2019(1):3032.[7] T a v m e n Gün eş.D a t a/i n f r a s t r u c t u r e i n t h e s m a r t c i t y:U n d e r s t a n d i n g t h e i n f r a s t r u c t u r a l p o w e r o f C i t y m a p p e r a p p t h r o u g h t e c h n i c i t y o f d a t a[J].B i g D a t a& S o c i e t y,2020,7(2):115.[8]刘峰.高精度惯性定位定向/地图信息匹配导航技术研究[D].国防科技大学,2019.L I U F e n g.R e s e a r c h o n h i g h p r e c i s i o n i n e r t i a l p o s i t i o n i n g o r i e n t a t i o n/m a p-m a t c h i n g n a v i g a t i o n t e c h n o l o g y[D].N a t i o n a l U n i v e r s i t y o f D e f e n s e T e c h n o l o g y,2019. [9]郝伟姣.I M U/P P P辅助航空摄影技术的应用[D].南昌:东华理工大学,2013.H A O W e i j i a o.T h e a p p l i c a t i o n I M U/P P P-s u p p o r t e d p h o t o g r a m m e t r y[D].N a n C h a n g:E a s t C h i n a I n s t i t u t e o f T e c h n o l o g y,2013.[10]龚婷婷.G N S S精密单点定位及其质量控制方法研究[D].淮南:安徽理工大学,2020.G O N G T i n g t i n g.S t u d y o f G N S S p r e c i s e p o i n t p o s i t i o n i n g a n d i t s q u a l i t y c o n t r o l m e t h o d[D].H u a i n a n:A n h u iU n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y,2020. [11]周锋.多系统G N S S非差非组合精密单点定位相关理论和方法研究[J].测绘学报,2020,49(7):938.Z H O U F e n g.T h e o r y a n d m e t h o d o l o g y o f m u l t i-G N S S u n d i f f e r e n c e d a n d u n c o m b i n e d p r e c i s e p o i n t p o s i t i o n i n g[J].J o u r n a l o f S u r v e y i n g a n d M a p p i n g,2020,49(7):938.[12]李腾,施昆,张宁.机载L i D A R多脉冲模式在山区数据采集中的应用[J].软件,2018,39(2):152156.L I T e n g,S H I K u n,Z H A N G N i n g.A p p l i c a t i o n o f a i r b o r n e L i D A R m u l t i-p u l s e m o d e i n m o u n t a i n d a t aa c q u i s i t i o n[J].S o f t w a r e,2018,39(2):152156.[13]寇添,王海晏,王芳,等.机载多脉冲激光测距特性及其不确定度研究[J].物理学报,2015,64(12):102109.K O U T i a n,W A N G H a i y a n,W A N G F a n g,e t a l.R a n g i n g c h a r a c t e r i s t i c a n d u n c e r t a i n t y o f a i r b o r n em u l t i-p u l s e l a s e r[J].A c t a P h y s i c a S i n i c a,2015,64(12):102109.[14]周俊超,代荫,刘智华.基于自然资源调查监测现状的统一体系构建研究[J].测绘与空间地理信息, 2021,44(12):5153,56.Z H O U J u n c h a o,D A I Y i n,L I U Z h i h u a.R e s e a r c h o f c o n s t r u c t i o n u n i f i e d s y s t e m b a s e d o n s t a t u s o f n a t u r a l r e s o u r c e s s u r v e y i n g a n d m o n i t o r i n g[J].G e o m a t i c s& S p a t i a l I n f o r m a t i o n T e c h n o l o g y,2021,44(12):51 53,56.[15]崔营营.面向多传感器航空遥感监测系统数据处理方法研究[D].北京:首都师范大学,2011.C U I Y i n g y i n g.R e s e a r c h o n d a t a p r o c e s s i n g m e t h o d o fm u l t i-s e n s o r o r i e n t e d a e r i a l R e m o t e s e n s i n g m o n i t o r i n g s y s t e m[D].B e i j i n g:C a p i t a l N o r m a l U n i v e r s i t y,2011.。
Leica FCMS飞行控制及管理软件
Leica FCMS飞行控制及管理软件
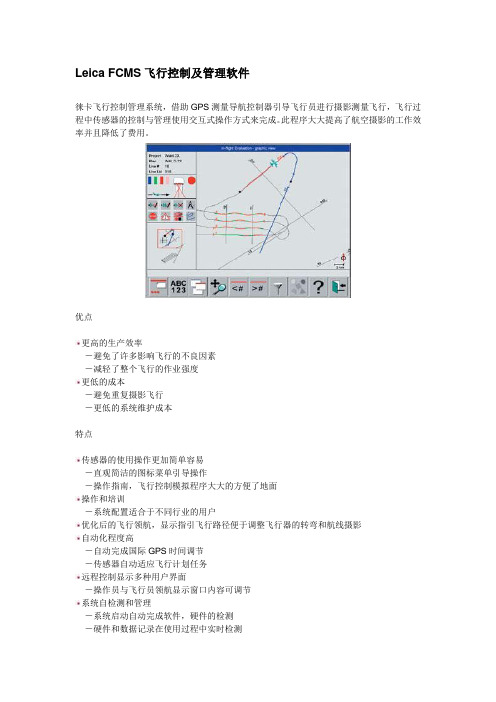
徕卡飞行控制管理系统,借助GPS测量导航控制器引导飞行员进行摄影测量飞行,飞行过程中传感器的控制与管理使用交互式操作方式来完成。
此程序大大提高了航空摄影的工作效率并且降低了费用。
优点
更高的生产效率
-避免了许多影响飞行的不良因素
-减轻了整个飞行的作业强度
更低的成本
-避免重复摄影飞行
-更低的系统维护成本
特点
传感器的使用操作更加简单容易
-直观简洁的图标菜单引导操作
-操作指南,飞行控制模拟程序大大的方便了地面
操作和培训
-系统配置适合于不同行业的用户
优化后的飞行领航,显示指引飞行路径便于调整飞行器的转弯和航线摄影
自动化程度高
-自动完成国际GPS时间调节
-传感器自动适应飞行计划任务
远程控制显示多种用户界面
-操作员与飞行员领航显示窗口内容可调节
系统自检测和管理
-系统启动自动完成软件,硬件的检测
-硬件和数据记录在使用过程中实时检测
-提供自动提示错误和自动修复信息
遇到系统问题,提供诊断信息,引导用户排除故障
飞行控制管理系统的组成
OI40 触摸屏飞行控制系统GI40 领航LED显示屏
OC50 领航控制器CU40 系统控制器
MM40 960GB 光纤存储器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
徕卡 CityMapper
混合型城市航空摄影系统
智慧城市智慧选择
RealCity
持续创新,颠覆传统
一面是最具代表性的倾斜相机产品,一面是跨世而生的机载倾斜激光雷达,徕卡测量系统匠心独具的将两个世界中的佼佼者合二为一。
这是徕卡近200年历史的再一次见证,不断的创新,是我们进步的基石,将测量工作变得更简单,也是我们不变的初衷。
一次飞行,多种成果
徕卡CityMapper是世界上首款专为
城市测量而打造的机载混合传感器。
单传感器可以获取倾斜影像和多波段
下视影像.同时包括三维激光数据。
这些数据能够为智慧城市应用提供必
要的二维及三维地理空间数据成果。
这是目前在城市区域内最高效的机载
数据获取方案。
智慧城市,智慧选择
随着城市化进程的不断加剧.徕卡
C i t y M a p p e r为在快速变革的城市
环境中进行智慧决策提供了基石。
CityMapper以最简单和高效的方式,
将日新月异的城市环境变成数据,而
且不遗漏任何细节。
想在充满挑战
的城市测绘行业中彰显卓越?徕卡
CityMapper是您最智慧的选择!
徕卡
CityMapper 混合型城市航空摄影系统
感受变革的力量! 倾斜相机和激光雷达的完美结合,单次飞行不但可获取5个视角的高清倾斜影像,同时可获取高密度激光点云数据,是目前全世界综合性最强的机载航空摄影系统!
倾斜激光扫描,在获取高密度的地表点云的同时,建筑物侧面的精细点
云也可轻松采集。
对于复杂建筑物建模、凹凸墙体建模,提供点云支持! 系统内部集成NovAtel SPAN GNSS-IMU 系统,支持GPS/GLONASS/BeiDou 等全球卫星星座,高精度陀螺仪保证更少控制点布设,更高数据质量!
激光点云前视左视下视右视后视
搭载全新的Pod Lifter升降支架,方便的升起和落下传感器镜筒,适应多种机型,最大限度避免遮挡。
紧急激光制动按钮,最大限度保障操作安全。
依托徕卡航空传感器通用平台,灵活的安装、共享组件,带来技术通用的便利,大大降低传感器培训和使用成本。
通用硬件平台
PAV100陀螺OC60操作员控制终端PD60飞行员导航终端通用软件平台
MissionPro
航线设计与评估软件
FlightPro
飞行导航与控制软件
InertialExplorer
GNSS-IMU数据解算软件
通用软件平台——飞行自在从容
MissonPro :飞行设计与评估,精准的飞行计划为您节省更多飞行成本Inertial Explorer :飞行轨迹解算,精度的保证,我们用数据说话
MissionPro 飞行计划设计与评估
飞行计划设计
·激光参数配置
·分辨率设计
·重叠度设计
·飞行高度设计
·高程模型参考
·参数报告输出
飞行计划评估
·导入飞行后的轨迹
·查看实际曝光参数
·查看实际偏离
Inertial Explorer GNSS-IMU数据解算
GNSS数据解算
·精密星历解算
·基站解算
·下载服务站数据
·卫星信号检索
IMU数据融合
·IMU数据松耦合
·IMU数据紧耦合
精度报告输出
·数据解算报告
·融合精度报告
·精度图形输出
通用软件平台——HxMap HxMap (标配):数据预处理工作流管理,快速提供标准的激光和影像数据HxMap RealCity (选配):大型三维实景智能生产系统,开创智慧城市新未来 标配功能
·工作流管理
·
原始数据读取 ·检校文件关联
·数据预处理
·定向文件生成
·缩略图快速质检
·影像细节质量检查
·连接点自动匹配
·空中三角测量
·彩色影像输出
·点云匹配提取
·正射影像纠正
·激光检校
·激光数据处理
选配功能
·三维建模HxMap – 影像预处理-全图概览HxMap – 影像质检-影像调色
© Leica Geosystems AG 版权所有所有的说明描述及技术数据,如有变动恕不另行通知。
1906 - V1 - 1000徕卡测量系统贸易(北京)有限公司
北京市朝阳区朝外大街16号中国人寿大厦2002-2005室(100020)
电话:+86 10 8569 1818
传真:+86 10 8525 1836
电子信箱:beiji ng@
徕卡测量系统(上海)技术中心
上海浦东张江博云路2号浦软大厦302-303室(201203)
电话:+86 21 6106 1088
传真:+86 21 6106 1008
电子信箱:shanghai@
徕卡测量系统有限公司(香港)
九龙长沙湾777号荔枝角道田氏企业中心15楼1501-1506室
电话:+852 2564 2299
传真:+852 2564 4199
电子信箱:lsghk@
海克斯康测绘与地理信息系统(青岛)有限公司
青岛市株洲路188号(266101)
电话:+86 532 8089 5138
传真:+86 532 8089 5100
客户呼叫中心:400 670 0058
客户短信平台:1376 150 1955
技术交流论坛:/bbs
公司网址:
徕卡App Store:/shopping
徕卡CityMapper产品参数
不可见激光辐射,避免眼睛或皮肤暴露在直射或散射的4级激光产品下,EN/IEC 60825-1:2014。
1最大飞行高度可在地面反射率≥10%(例如:干沥青)和100%激光能量时达到
2表中精度和点密度统计基于1000m AGL及60m/s航速下获取的数据
3 1σ值代表的68%置信区间。
通常,RMSE值等于1的准确值
4这里的测距精度指的是LiDAR的测量精度,不包含GNSS/IMU误差
5高程和平面精度的估计值基于集成的SPAN系统和5cm的 GPS
误差
RTCA D0-160G, EUROCAE-14G,USA FCC Part 15。