第4章 差动放大器 (2)
南邮模电 第四章 差动放大电路和功率放大电路
RC
+
V1 + Uid1 - -
Uid2
V2
Uid=Uid1-Uid2
-
+
11
图4―13基本差动放大器的差模等效通路
U od 1. 差模电压放大倍数 Aud U id 在双端输出时 U od U od 1 U od 2 2U od 1 2U od 2
U id U id1 U id 2 2U id1 2U id 2
+
~ U i1 U i 2 2 ~ U i1 U i 2 2
~
RE -UEE
U i1 U i 2 2 2
~ U i1 U i 2
32
双端输出时: Uo AudUid Aud (Ui1 Ui 2 )
1 单端输出时: U o1 AudU id Auc (单)U ic 2 1 U o 2 Aud U id Auc (单)U ic 2
6
图4―12 基本差动放大器
RC UC1 U i1 + V1
RL Uo - V2
RC UC2
U CC
U CE1Q U CE 2Q U CC 0.7 I C1Q RC
U C1Q U C 2Q U CC I C1Q RC
静态时,差动放 大器两输出端之 间的直流电压为 零。
7
34
六、放大电路的四种接法
差动放大电路有两个输入端和两个输出端, 所以信号的输入端和输出端有四种不同的连 接方式,即(1)单端输入,单端输出;(2) 双端输入,双端输出;(3)单端输入,双端 输出;(4)双端输入,单端输出。图4.2.6 给出了电路图。
35
(a)双端输入、双端输出 (b)双端输入、单端输出
第4章 差动放大器

17
差模特性
(假定Vin1-Vin2 从-变化到+ )
Vin1比Vin2更负,M1截止,M2导 通,ID2=ISS,因此Vout1=VDD, Vout2=VDD-RDISS Vin1逐渐增大,M1开始导通, Vout1减小,由于ID1+ID2=ISS, M2流经的电流减小,Vout2增大; 当Vin1=Vin2 时, Vout1=Vout2=VDD-RDISS/2。 当Vin1比Vin2更正时,差动对 两侧情况正好与上述情况相 反。
低电压工作(宽输出摆幅)的共源共栅电流镜
考察图(b),所有晶体管均处于饱和区, 选择合适的器件尺寸,使VGS2=VGS4,若选择
M3~M4消耗的电压余度最小(M3与M4过驱动电压 之和),且可以精确复制IREF(VDS3=VDS1)。
2016/1/22
共源共栅电流镜
4 4
三种电流镜的比较
(W/L)=25/0.5, nCOX=50A/V2,VT=0.6V, ==0, VDD=3V。求: 1. 如果RSS上的压降保持在0.5V,则输入 共模电平=? 2. 计算差模增益等于5时的RD=? 3. 如果输入共模电平比(1)计算出的值大 200mV,则输出如何变化 (1) 因ID1= ID2=0.5mA,故:
Vb
M3
两边对称
15
共模特性
采用NMOS提供尾电流ISS,Vin,CM从0开始增加。
当Vin,CM=0时,ID1=ID2=ID3=0 Vin,CM增加,M3导通,处于三极管区; 当Vin,CM足够大时,M3进入饱和区, 因此电路正常工作状态应满足 Vin,CMVGS1+(VGS3-VTH3) Vin,CM进一步增加, Vin,CM>Vout1+VTH, M1 和M2进入三极管区,Vout1=VDD-RD*ISS/2
讲答案4章 差动放大电路
第4章 差动放大电路在工业控制过程中,如温度、压力这样的物理量,被传感器检测到并转化为微弱的。
变化缓慢的非周期电信号。
而这些信号还需要经过直流放大器放大以后,才能进行进一步的处理或推动二次仪表进行显示。
那么,这里的放大器一般采用直接耦合多级放大器。
直接耦合多级放大器存在零点漂移的问题,克服零点漂移的有效办法,就是在多级放大器的输入级采用差动放大电路。
4.1 典型差动放大电路4.1.1 零点漂移问题1、零点漂移(1)零点漂移:指输入信号电压为零时,输出电压发生缓慢地、无规则地变化的现象,简称零漂。
(2)零漂产生的原因:晶体管参数()CEO BE I U β、、随温度变化、电源电压波动、电路元件参数的变化等。
(其中主要因素是温度对晶体管参数的影响,称为温漂。
)(3)温漂:环境温度每变化1℃,将放大电路输出端出现的漂移电压oU '∆ 折算到输入端,用这个折算到输入端的漂移电压数值表示零漂的大小,用i U '∆表示。
(常常认为,零漂就是温漂。
)放大电路的级数越多,放大倍数越大,则零漂电压逐级放大,就使零漂越严重,有时会将输入信号淹没。
那么,第一级零漂对输出端的总零漂来说,占主要地位。
2、抑制温度漂移的措施:① 在电路中引入直流负反馈。
(如第2章介绍的分压式偏置电路中的E R 就是一个直流负反馈。
)② 采用特性相同的管子,使它们的温漂相互抵消,构成差动放大电路,至于直接耦合多级放大电路的输入端。
(在直接耦合放大电路中抑制零点漂移最有效的电路结构是差动放大电路。
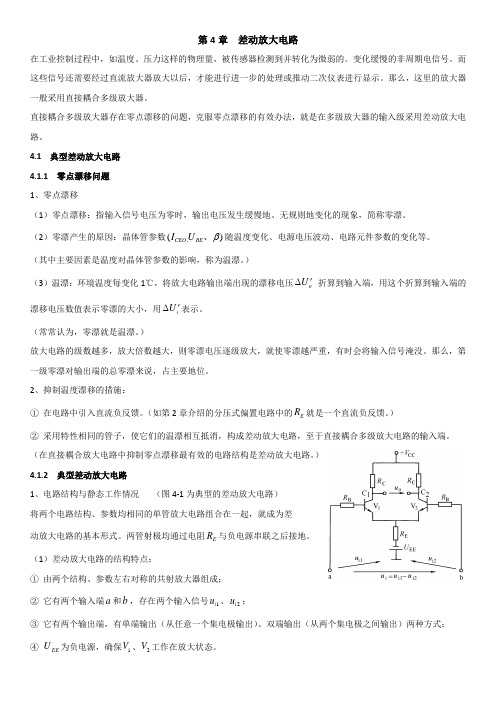
)4.1.2 典型差动放大电路1、电路结构与静态工作情况 (图4-1为典型的差动放大电路)将两个电路结构、参数均相同的单管放大电路组合在一起,就成为差动放大电路的基本形式。
两管射极均通过电阻E R 与负电源串联之后接地。
(1)差动放大电路的结构特点:① 由两个结构、参数左右对称的共射放大器组成;② 它有两个输入端a 和b ,存在两个输入信号1i u 、2i u ;③ 它有两个输出端,有单端输出(从任意一个集电极输出)、双端输出(从两个集电极之间输出)两种方式; ④ EE U 为负电源,确保1V 、2V 工作在放大状态。
第4章 差动放大电路与集成运算放大器

id
图3-3 差动放大电路的输入方式
共模信号 与差模信号
Ui1 Ui2
线性放 大电路
Uo
1 共模信号输入电压: U ic (U i1 U i 2 ) 2
差模信号输入电压:U
id
(U i1 U i 2 )
差模信号:是指在两个输入端加幅度相等, 极性相反的信号。
共模信号 :是指在两个输入端加幅度相等, 极性相同的信号。
在放大器的两个输入端分别输入大小相等、 极性相同的信号,即 ui1 ui 2 时,这种输入方 式称为共模输入,所输入的信号称为共模 (输入)信号。共模输入信号常用 uic 来表 示,即 uic ui1 ui 2 。在放大器的两个输入端 分别输入大小相等、极性相反的信号,即 时这种输入方式为差模输入,所输 入的信号称为差模输入信号。差模输入信 号常用 u 来表示,即 ui1 uid / 2 ui 2 uid / 2
输入信号种类
ui1 = ui2 共模输入
(common mode)
uC ud
ui1 = -ui2 差模输入
(differential mode) 任意输入ui1, ui2(既非差模又非共模)
3.2 相关的理论知识
(2)共模输入
如图3-3(a)所示为共模输入方式,由图中可以看出,当差动放大器输 入共模信号时,由于电路对称,两管的集电极电位变化相同,因而输出 电压 u oc 恒为零。
Rod 2RC
5.共模抑制比 如果温度变化,两个差放管的电流将按相同的方向一起增大或减小,相当于给放大电路 加上一对共模输入信号。所以差模输入信号反映了要放大的有效信号,而共模输入信号 可以反映由温度等原因而产生的漂移信号或其它干扰信号。通常希望差分放大电路的差 模电压放大倍数愈大愈好,而共模电压放大倍数愈小愈好。 共模抑制比反映了差分放大电路放大差模信号、抑制零漂和共模信号的能力。
差动运算放大器优秀课件

Rc UC2
V2
UCC
Rb2 Rb1
ui2
表3-1 差动放大电路的输入输出形式
表3-1 差动放大电路的输入输出形式
R b 2 共模信号 Rb1
1 ui2 2 uid uic
2、单端输出
(3)单端输出KCMRR
RC
KCMRR
Aud1 Auc1
2rbe
RC
Re
rbe
(4)单端输出时的ro
2Re
∵仅从一管的集电极输出 ∴rod=RC
( 2( 1 )Re r )
Rc
Rb2
UC1
Rb1
V 1 uO
ui1
共模信号输入 时交流通路
RC
UC1
V1
ui 1 uic
uo
uo1
ie1 RE
RC
UC2
uo2 V2
ui 2 uic
ie ie2
6、共模特性动态分析
(2)Re对差模信号不起负
反馈作用,Re对共模信号 起强烈的负反馈.Re越大
RC
负反馈越强,抑制漂移
IC1 IC1
RC
U CC
IC2 IC2
Aud 称为差模电压放大倍数
ui1
差动
uο Aud ( ui1 ui 2 )
放大电路
uo
ui2
Aud
3.2 差动放大电路
3.2.1 为什么选用“差动”的电路形式 3.2.2 基本差动放大电路的分析 3.2.3 差动放大电路的输入、输出形式 3.2.4 差动放大电路的改进形式
3.2.1为什么选用“差动”的电路形式?
UCC
RC
UC2
V2
IE2
2IE1
差动放大器

差动放大器差动放大器一、实验目的1、加深对差动放大器性能及特点的理解2、学习差动放大器主要性能指标的测试方法二、实验原理如图1所示,是差动放大器的基本结构。
它由两个元件参数相同的基本共射放大电路组成。
当开关K拨向左边时,构成典型的差动放大器。
调零电位器Rp用来调节T1、T2管的静态工作点,使得输入信号Ui=0时,双端输出电压UO=0。
RE为两管共用的发射极电阻,它对差模信号无负反馈作用,因而不影响差模电压放大倍数,但对共模信号有较强的负反馈作用,故可以有效地抑制零漂,稳定静态工作点。
图1、差动放大器实验电路当开关K拨向右边时,构成具有恒流源的差动放大器。
它用晶体管恒流源代替发射极电阻RE,可以进一步提高差动放大器抑制共模信号的能力。
1、静态工作点的估算(1)、典型电路(2)、恒流源电路2、差模电压放大倍数和共模电压放大倍数当差动放大器的射极电阻RE足够大,或采用恒流源电路时,差模电压放大倍数Ad由输出端方式决定,而与输入方式无关。
(1)、双端输出:RE=∞,RP在中心位置时,(2)、单端输出当输入共模信号时,若为单端输出,则有若为双端输出,在理想情况下:实际上由于元件不可能完全对称,因此AC也不会绝对等于零。
3、共模抑制比CMRR为了表征差动放大器对有用信号(差模信号)的放大作用和对共模信号的抑制能力,通常用一个综合指标来衡量,即共模抑制比。
三、实验内容1、典型差动放大器性能测试按图1连接实验电路,开关K拨向左边构成典型差动放大器。
1)、测量静态工作点①、调节放大器零点信号源不接入。
将放大器输入端A、B与地短接,接通±12V直流电源,用直流电压表测量输出电压UO,调节调零电位器RP,使UO=0。
调节要仔细,力求准确。
②、测量静态工作点零点调好以后,用直流电压表测量T1、T2管各电极电位及射极电阻RE两端电压URE,记入表1。
表1:测量静态工作点数据测量记录表2)测量差模电压放大倍数静态工作点调好之后,将函数信号发生器的输出端接放大器输入A端,地端接放大器输入B端构成单端输入方式,调节输入信号为频率f=1KHz 的正弦信号,用示波器监视输出端(集电极C1或C2与地之间)。
差动放大器

输出级:与负载相接。 要求:其输出电阻低,带负载能力强,能输出足够大 的电压和电流,并有过载保护措施。 电路形式:一般由互补对称电路或射极输出器构成。 偏置电路:为上述各级电路提供稳定和合适的偏 置电流,决定各级的静态工作点,也可以作为有源负 载提高电压增益,输入级设置一个电流值低而又十分 稳定的偏置电流。 电路形式:各种恒流源组成。
模拟IC:集成运算放大器、集成功率放大器、集成高频放大器、 集成中频放大器、集成比较器、集成乘法器、集成稳压器、集成 A/D和D/A转换器、集成锁相环。
2、按有源器件:双极型
单极型
集成电路的种类很多,分类方法有以下几种: 1.按集成度的高低,如上所述,集成电路可分为小规模、中规模、大规模
和超大规模四类。
K CMR Auc Aud
Aud与Auc比值的绝对值记为KCMR ,则 A ud u od u id ;
实验结果表明,│Aud│ │Auc│(>>,≈,<<)或KCMR (>>1,≈1,<<1), 即差动放大电路对差模信号的放大能力 (远大于/基本接近于/远小于)对共模信 号的放大能力。
二、特点 1、在集成工艺下,元器件参数精度不高,但对称性 好,适宜做差动放大电路。 2、集成电路不适于制造大于几十皮法以上的电容和 电感,故电路间采用直接耦合。 3、在集成电路中,制造三极管(NPN)比制造大电阻 和二极管方便。所以常用三极管代替大电阻、二极管。 4 4、集成电路中的PNP三极管一般做成横向的。所以 β 很低 ≤10 , 这时β ≠β +1。
e0
R
I C1
当Re1与Re0相差不太大时,可以 认为UBE1≈UBE0,则有 IE1Re1≈IE0Re0≈IREFRe0
模拟电子技术(西电第三版)第4章 差动放大电路与集成运算放大器
4
实图4.1 LM741的管脚排列及序号 (a) 外引脚排列顺序;(b) 符号
5
2. 负反馈的引入 由第3章可知,放大器引入负反馈后,可以改善很多性 能。集成运放若不接负反馈或接正反馈,只要有一定的输入 信号(即使是微小的输入信号),输出端就会达到最大输出值 (即饱和值),运放的这种工作状态称为非线性工作状态。非 线性工作状态常用在电压比较器和波形发生器等电路中,这 里暂不考虑。集成运放引入负反馈后,就可工作于线性状态。 线性状态时,输出电压Uo与输入电压Ui之间的运算关系仅取 决于外接反馈网络与输入端的外接阻抗,而与运算放大器本 身参数无关。这一点大家在实训中要充分体会。
6
3. 反相比例运算电路 依外接元件连接的不同,集成运放可以构成比例放大、 加减法、微分、积分等多种数学运算电路。本实训只进行其 中一种运算——反相比例运算的练习。 反相比例运算电路如实图4.2所示。输入信号Ui从反相 输入端输入,同相输入端经电阻接地。这个电路的输出与输 入之间有如下关系:
7
即输出电压与输入电压成比例,比例系数仅与外接电阻Rf、 R1有关,与运放本身的参数无关。同相端所接R2、R3称为平 衡电阻,其作用是避免由于电路的不平衡而产生误差。
43
图 4.1.9 加调零电位器的差动放大器 (a) 射极调零;(b) 集电极调零
44
例4.1.2 图4.1.10(a)为带恒流源及调零电位器的差动 放大器,二极管VD的作用是温度补偿,它使恒流源IC3基本 不受温度变化的影响。设UCC=UEE=12 V,Rc=100 kΩ, RP=200 Ω,R1=6.8 kΩ,R2=2.2 kΩ,R3=33 kΩ,Rb= 10 kΩ,UBE3=UVD=0.7 V,各管的β值均为72,求静态时的 UC1,差模电压放大倍数及输入、输出电阻。
差动放大器及其原理图

差动放大器,差动放大器电路图及工作原理2011年05月26日15:55:17差动放大器,差动放大器电路图及工作原理差动放大器相关资料:差动放大器的特点是静态工作点稳定,对共模信号有很强的抑制能力,它唯独对输入信号的差(差模信号)做出响应,这些特点在电子设备中应用很广。
集成运算放大器几乎都采用差动放大器作为输入级。
这种对称的电压放大器有两个输入端和两个输出端,电路使用正、负对称的电源。
根据电路的结构可分为:双端输入双端输出,双端输入单端输出,单端输入双端输出及单端输入单端输出四种接法。
凡双端输出,差模电压增益与单管共发放大器相同;而单端输出时,差模电压增益为双端输出的一半,另外,若电路参数完全对称,则双端输出时的共模放大倍数=0,其实测的共模抑制比将是一个较大的数值,愈大,说明电路放大的是电压,不能放大电流。
放大多少倍都可以,可以用多级放大。
不过单级最好不要超过100,否则容易引起信号失真。
抑制共模信号的能力愈强。
差动放大器电路图及工作原理基本差动放大电路:下图为差动放大器的两种典型电路。
其中左图为射极偏置,右图为电流源偏置差动放大电路图(a)射极偏置差放(b)电流源偏置差放差动放大电路有两个输入端子和两个输出端子,因此信号的输入和输出均有双端和单端两种方式。
双端输入时,信号同时加到两输入端;单端输入时,信号加到一个输入端与地之间,另一个输入端接地。
双端输出时,信号取于两输出端之间;单端输出时,信号取于一个输出端到地之间。
因此,差动放大电路有双端输入双端输出、单端输入双端输出、双端输入单端输出、单端输入单端输出四种应用方式。
上面两个差动放大器电路均为双端输入双端输出方式。
差动放大电路的外信号输入分差模和共模两种基本输入状态。
当外信号加到两输入端子之间,使两个输入信号vI1、vI2的大小相等、极性相反时,称为差模输入状态。
此时,外输入信号称为差模输入信号,以vId表示,且有:当外信号加到两输入端子与地之间,使vI1、vI2大小相等、极性相同时,称为共模输入状态,此时的外输入信号称为共模输入信号,以vIC表示,且:当输入信号使vI1、vI2的大小不对称时,输入信号可以看成是由差模信号vId和共模信号vIc 两部分组成,其中根据上述,可得到下图的统一的简化差动放大电路。
第四章差动与集成运算放大电路
其中R′L=Rc∥(1/2RL)。这里R′L≠Rc∥RL,其原因是由于两 管对称,集电极电位的变化等值反相, 而与两集电极相连的
RL的中点电位不变,这点相当于交流地电位。因而对每个单管 来说, 负载电阻(输出端对地间的电阻)应是RL的一半,即
RL/2,而不是RL。
差动放大器对共模信号无放大,对差模信号有放大,这意 味着差动放大器是针对两输入端的输入信号之差来进行放大的,
第4章 差动放大电路与集成运算放大器
如图4.1.1(b)所示。不过,若采用图4.1.1(b)所示电路, 后级的集电极电位逐级高于前级的集电极电位,经过几级耦合 之后, 末级的集电极电位便会接近电源电压,这实际上也是限 制了放大器的级数。
所谓零点漂移,就是当输入信号为零时,输出信号不为零, 而是一个随时间漂移不定的信号。零点漂移简称为零漂。产生 零漂的原因有很多,如温度变化、电源电压波动、晶体管参数 变化等。其中温度变化是主要的,因此零漂也称为温漂。 在阻 容耦合放大器中,由于电容有隔直作用,因而零漂不会造成严 重影响。但是,在直接耦合放大器中,由于前级的零漂会被后 级放大,因而将会严重干扰正常信号的放大和传输。比如,图 4.1.1所示直接耦合电路中,输入信号为零时(即ΔUi=0),输 出端应有固定不变的直流电压Uo = UCE2。
所示。
第4章 差动放大电路与集成运算放大器
第4章 差动放大电路与集成运算放大器
由图4.1.4(a)可以看出,当差动放大器输入共模信号时, 由于电路对称,其输出端的电位Uc1和Uc2的变化也是大小相等、 极性相同,因而输出电压Uoc保持为零。可见,在理想情况下 (电路完全对称),差动放大器在输入共模信号时不产生输出 电压,也就是说,理想差动放大器的共模电压放大倍数为零, 或者说,差动放大器对共模信号没有放大作用,而是有抑制作 用。实际上,上述差动放大器对零漂的抑制作用就是它抑制共 模信号的结果。因为当温度升高时,两个晶体管的电流都要增 大,这相当于在两个输入端加上了大小相等、 极性相同的共模 信号。换句话说,产生零漂的因素可以等效为输入端的共模信 号。显然,Ac越小,对零漂的抑制作用越强。
第四章 差动放大器

• Vin1比Vin2更负,M1截止,M2 导通,ID2=ISS,因此Vout1=VDD, Vout2=VDD-RDISS • Vin1逐渐增大,M1开始导通, Vout1减小,由于ID1+ID2=ISS, M2流经的电流减小,Vout2增 大;当Vin1=Vin2 时, Vout1=Vout2=VDD-RDISS/2。 • 当Vin1比Vin2更正时,差动对 两侧情况正好与上述情况相反。
辅助定理说明了P点可以认为是“交流地”,即“虚地”。
辅助定理的证明(2):
D1和D2在P点的作用用戴维南等效来表示 VT1和VT2变化的大小相等而方向相反,RT1等于RT2,则VP保持为常数
利用P点虚地(交流地)的特点,电路可等效为两个 独立的部分,即“半边电路”概念。
如果输入信号不是全差动的情况
每一端的输出电压最高为VDD,最低为Vin,CM-VTH
输入共模电平越大,允许的输出摆幅就越小
– 小信号分析
(半边电路) 辅助定理:考虑图中所示的对称电路,其中D1和D2 代表三端有源器件。假设Vin1从V0变化到V0+ΔVin, Vin2从V0变化到V0-ΔVin,那么,如果电路仍保持线 性,则Vp值保持不变。假定λ=0。
差动对的两个特性: 1、输出端的最大电平和最小电平是确定的,分别是VDD和VDD-RDISS与输入共模电平无关 2、小信号增益当Vin1=Vin2 时达到最大,且随着|Vin1-Vin2|的增大而逐渐减小为零
– 共模特性
采用NMOS提供尾电流ISS,Vin,CM从0开始增 加。 • 当Vin,CM=0时,ID1=ID2=ID3=0,M3处于深 线性区
• Vin,CM增加,M3导通,处于三极管区;当 Vin,CM足够大时,M3进入饱和区,因此电路 正常工作状态应满足Vin,CMVGS1+(VGS3VTH3) • Vin,CM进一步增加, Vin,CM>Vout1+VTH=VDDRDISS/2+VTH, M1和M2进入三极管区
chapter4差动放大器精品PPT课件

chapter 4 差动放大器
27
(1)先求Vin1在Vout1的响应,将M2看作是M1的等效RS.
其中,
RS
RD2 ro2 1 ( gm2 gmb2 )ro2
1 gm2
因为带源极负反馈电阻的共源放大器的增益为:
入共模电平的变化对输出有什么影响呢?
单输出端对 Vin,CM 的响应如下:
Vx Vin,CM
gm 1 2gm RSS
RD
Vy Vin,CM
gm 1 2gm RSS
(RD
RD )
Vx
Vy
gm 1 2gm RSS
RD
Vin,CM
21
★交流小信号分析
4.2.2 定量分析
(1)由电流电压方程导出小信号跨导及增益
差分放大器的三个器件都工作在放大区,我们找出这个放大器
的等效跨导Gm .
Gm的定义如下:
Gm
I D Vin
I D I D1 I D2
Vin Vin1 Vin2
chapter 4 差动放大器
22
因为:
ID
1 2
nCox
其中,
VT
Vin1, RT
1 g m1
这时M2为信号源为Vin1,信号源内阻为RT的CG放大器,它的增益
为:
VY
RD
Vin1
11
g g chapmte1r 4 差动放大m器2
(4.5)
29
由(4.4)和(4.5)可知
VX VY
2RD 11
Vin1
gm1 gm2
b.那么当Vin1 =0 ,Vin2在Vx和Vy端的响应是多少呢?
差动放大器

uo T2 E
IC3
-UEE
对Ad而言,双端 +UCC 输入与单端输入 RC C2 RB ib2 效果是一样的。 ui1 ui 2 ud B2 2 ui2 ui1 ui 2 uc 2 双端输入: ui1 = -ui2 =0.5ui ud = 0.5ui , uc = 0 单端输入:ui1 =-ui ,ui2 = 0 ud = 0.5ui , uc = 0.5ui
uo= uC1 - uC2= uC1- uC2 = 2uC1
差模电压放大倍数:
uo uo AC ui1 ui 2 2ui1
(很大,>1)
(4-6)
五、共模抑制比(CMRR)的定义
CMRR — Common Mode Rejection Ratio KCMRR =
Ad Ac
(分贝)
差模信号通路
RC
RB
ui1 R ib1
ic1 ic2 uo uod1 T1 uod2 E
RC T2
RB ib2 R ui2
T1单边微变 等效电路
RB ib1
B1 C1
rbe1 E
(4-13)
ui1
ib1
RC
uod1
(二) 共模输入
RC RB
+UCC
ic2
T1
ic1 R uoc C uoc1 uoc2 RB
§ 5 差放电路的几种接法
RB RC C1 B1 T1 E uo T2 RC C2 B2 +UCC RB ui2
输入端 接法
输出端 接法
双端
单端
双端 单端
ui1
IC3
-UEE
A 双端输入双端输出: d = Ad1
第4章集成运算放大电路-差动
第四章 集成运算放大电路自 测 题一、选择合适答案填入空内。
(1)集成运放电路采用直接耦合方式是因为 。
A .可获得很大的放大倍数B . 可使温漂小C .集成工艺难于制造大容量电容(2)通用型集成运放适用于放大 。
A .高频信号B . 低频信号C . 任何频率信号(3)集成运放制造工艺使得同类半导体管的 。
A . 指标参数准确B . 参数不受温度影响C .参数一致性好(4)集成运放的输入级采用差分放大电路是因为可以 。
A .减小温漂B . 增大放大倍数C . 提高输入电阻(5)为增大电压放大倍数,集成运放的中间级多采用 。
A .共射放大电路B . 共集放大电路C .共基放大电路解:(1)C (2)B (3)C (4)A (5)A二、判断下列说法是否正确,用“√”或“×”表示判断结果填入括号内。
(1)运放的输入失调电压U I O 是两输入端电位之差。
( )(2)运放的输入失调电流I I O 是两端电流之差。
( )(3)运放的共模抑制比cd CMR A A K = ( ) (4)有源负载可以增大放大电路的输出电流。
( )(5)在输入信号作用时,偏置电路改变了各放大管的动态电流。
( ) 解:(1)× (2)√ (3)√ (4)√ (5)×三、电路如图T4.3所示,已知β1=β2=β3=100。
各管的U B E 均为0.7V ,试求I C 2的值。
图T4.3解:分析估算如下:100BE1BE2CC =−−=R U U V I R μAβCC B1C0B2C0E1E2CC1C0I I I I I I I I I I I I R +=+=+====1001C =≈⋅+=R R I I I ββμA四、电路如图T4.4所示。
图T4.4(1)说明电路是几级放大电路,各级分别是哪种形式的放大电路(共射、共集、差放……);(2)分别说明各级采用了哪些措施来改善其性能指标(如增大放大倍数、输入电阻……)。
第四章 差动放大器

CMOS模拟集成电路设计
第四章 差动放大器
Copyright 2011, zhengran
3
4.1单端与差动的工作方式
单端信号:参考电位为某一个固定电位(通常是地); 差动信号:两个结点的电位差,且这两个结点电位相对于 某一固定电位(共模电平)大小相等方向相反。
CMOS模拟集成电路设计
第四章 差动放大器
17
4.2 基本差动对
例:画出当晶体管宽度及尾电流增大时,(a)中差动对的输入输出特性曲线的变化 确定差模范围的变化是画出特性 曲线的要点。
根据∆Vin1 = 2 I SS , 增大W,会 unCox (W / L)
导致差模输入范围减小,形成(b)。 增大I SS 并同时减小(W / L)可以获得更 好的差模输入范围及线性范围, 如(c)。
而从前边学过的输入输出特性图中知道,曲线单调,且只有一个过零点∆Vin = 0。
为什么?
当尾电流全部流经一个晶体管时∆Vin = ∆Vin1 = 2 I SS , 如果∆Vin 继续增大, unCox (W / L)
就会有一个输入管子发生截止。所以在假定管子都导通时推导出的零值点 ∆Vin = ± 4 I SS 是不合理的。 unCox (W / L)
CMOS模拟集成电路设计 第四章 差动放大器 Copyright 2011, zhengran
11
4.2 基本差动对
根据对共模输入的分析,画出其与差动对的小信号增益的关系。 小信号增益和输入管跨导成正比,跨导随着尾电流的增大而增大。
V1处,尾电流进入饱和。 V2处,输入管开始进入线性区。随着共模输入增加,输入管漏源电压不 断减小(漏端电压不变,源端不断增大),根据 g m = µ nCox (W / L)VDS 知,跨导将 会下降。 V1~V2之间就是输入共模的取值范围。
差动放大电路解读

4.5.2运算放大器的动态技术指标
1.开环差模电压放大倍数 Avd :(open loop voltage gain)运放在无外加 反馈条件下,输出电压的变化量与输入电压的变化量之比。 2.差模输入电阻rid :(input resistance)输入差模信号时,运放的 输入电阻。 3.共模抑制比 KCMR :(common mode rejection ratio)与差分放大电 路中的定义相同,是差模电压增益 Avd 与共模电压增益 Avc 之比, 常用分贝数来表示。 KCMR=20lg(Avd / Avc ) (dB) 4.-3dB带宽 f H : (-3dB band width) 运算 放大器的差模电压放大倍数在高频段下降3dB所定义的带宽 f H 。
第4章 集成运算放大器
4.1概述 4.2 集成运算放大器的基本结构
4.3电流源电路
4.4 差动放大电路 4.5集成运算放大器的宏模型
4.1 概述 所谓集成电路,就是通过半导体集成工艺把构成一个电路的所有元器件 及连接线一次制作在一块很小的硅基片上,形成一个具有一定功能的电子 部件、或系统。 集成电路分为两大类: 模拟集成电路和数字集成电路
静态分析
vi1 vi 2 0
I C1 I C 2 I C
VCE1 VCE 2 VCC IC RC VBE
动态分析
差动放大电路分为四种: 1. 双端输入、双端输出(双入双出) 2. 双端输入、单端输出(双入单出) 3. 单端输入、双端输出(单入双出) 4. 单端输入、单端输出(单入单出) 动态指标有:
• 差模电压放大倍数 • 差模输入电阻 • 输出电阻 • 共模电压放大倍数 • 2018/9/28 共模抑制比
差动放大电路
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2β (
漏极电流和Gm随输入电压变化曲线
二
• 基本差动对
差分对的小信号特性(1)
RD1=RD2=RD gm1=gm2=gm
利用叠加定理, 先考虑Vin1的 作用,先求VX
1 1 RS = = g m2 g m
gmRD gmRD AVX = =1+gmRS 2
这是带负反馈电 阻RS的CS放大器
gmRD VX = AVXVin1 = Vin1 2
二
• 基本差动对
ΔID 2ISS -βΔVin Gm = = ΔVin 4ISS 2 -ΔVin β V01 - V02 ISS AV = = βISS R D = 2β( )R D Vin1 - Vin2 2
2
差分放大器的增益
同单级CS放大器的增益
I SS ) 2
G m = β I SS =
三
• 共模响应
基本差动对电阻失配对共模响应的影响
ΔVX gm RD ΔVin,CM 1 2g m R SS ΔVY gm (R D ΔR D ) ΔVin,CM 1 2g m R SS
因电阻失配,共模电压的变 化在输出端产生了一个差动 成分,我们说电路表现出共 模到差模的变换。此时若输 入既有差模信号又有共模噪 声,则输入共模的变化就会 损害放大的差模信号。
二
• 基本差动对 “虚地”的应用-差分对的半边电路
显然, VX=-gmRDVin1, VY=-gmRD (-Vin1 )= gmRD1Vin1
VX - VY -2g m R D Vin1 g m R D = Vin1 - Vin2 Vin1 -(-Vin1 )
二
• 基本差动对 任意输入信号的差分对
在左图的电阻负载基本差动对中, 记: △Vin=Vin1-Vin2, 且1= 2= =μnCOX(W/L) ,假定M1和M2均工作在饱 和区,ISS为理想恒流源,则由平方律关系 有:
β 2ID 2 ID = (VGS - VTN ) VGS = + VTN 2 β 两边平方, 且考 2ID1 2ID2 ΔVin = VGS1 - VGS2 = 虑到ID1+ ID2= ISS β β
2
β 4ISS 2 ΔID = ΔVin -ΔVin 2 β
这是个重要公式
求:最大差模输入电压是多少?
二
• 基本差动对 基本差分对的定量分析(3)
3. 求最大差模输入电压.假定△Vinmax时,M1上通过的电流恰好 为ISS,M2刚好截至,即VGS2=VTN,此时有:
2ISS 2ISS V VGS1 = + VTN Δ inmax = V GS1 - V GS2 = β β
二
• 基本差动对
差分对的小信号特性(2)
利用叠加定理, 先考虑Vin1的 作用,再求VY
1 1 RT = = g m1 g m
VT=Vin RL1 求开路电压VT
这是CG放大器
利用小信号等 效电路,可求得:
g m1 R L1 R D1 利用CG放大器已有公式: VR L1 = Vin 1 + g m1 R L1 gm2RD gmRD g m1 R L1 R D1 AVX = = VT = lim VR L1 = Vin = Vin 1+g R 2 m2 T R L1 → ∞ 1 + g m1R L1
差动对的两个重要特性: 1. 输出端的最大和最小电平是确 定的(分别为VDD和VDD -RDISS) 。 它们与共模输人电平无关。 2. 小信号增益当Vin1= Vin2时达到最 大,且随着| Vin1- Vin2 | 的增加而逐渐 减小到零。也就是说, 随着输入电 压摆幅的增大,电路变得更加非线性。 当Vin1= Vin2时, 我们说电路处于平 衡状态, 即静态。
ΔVin
2
2ISS 4 β 2 2 = ID1ID2 4ID1ID2 =(ISS - ΔVin ) β β 2
二
• 基本差动对
基本差分对的定量分析(2)
2ISS 4 β 2 2 ΔVin = ID1ID2 4ID1ID2 =(ISS - ΔVin ) β β 2 β 2 2 2 2 2 ΔID =(ID1 - ID2 ) =(ID1 + ID2 ) - 4ID1ID2 = ISS -(ISS - ΔVin )2 2 2 2 2 ΔV 4ISS 2 2 4 in ΔVin βISSΔVin ΔVin ) ( β 4 4
二
• 基本差动对 基本差分对的共模特性
当VP≤Vb-VTN时, M3 工作在线性区,等效 于一个小电阻
VinCMmin
为保证M1和M2饱和, VinCMmin=?, VinCMmax =?
二
• 基本差动对
差动对小信号差动增益与共模输入电平的关系
VinCMmin
VinCMmax
产生ISS的MOS管线性
二
• 基本差动对 差分对增益与CS放大器增益的比较
• 如果差分对的尾电流ISS与CS放大器的静态工作电流相同, 则差分对管的跨导 gm 只有CS放大器中MOS管跨导的 1/21/2 。即差分对的增益只有CS放大器的1/21/2 。 • 如果两种放大器中MOS管的(W/L)和负载RD均相同, 为了得 到相同的增益, 若 CS 放大器中静态工作电流为ISS, 则差分 对中的尾电流必须等于 2ISS 。 • 由此可见,差分对是以更大的功耗来获取抗干扰能力、更 好的线性。然而,若不使用差分对,即使将CS放大器功耗 增加一倍,也不可能获得与差分对相同的特性。
静态时△Vin =0, Gm为:
M1、M2的等效跨导Gm为:
ISS G m = βISS = 2β( ) 2
ΔID 2ISS -βΔVin Gm = = ΔVin 4ISS 2 -ΔVin β
2
又V01-V02=RD △ID = RD Gm △Vin,故 平衡态下的小信号差动电压增益AV为:
ISS A V = βISS R D = 2β( )R D 2
三
• 共模响应
尾电容有限时基本差分对的共模响应
差动对的共模相应取决于尾电 流的输出阻抗和电路的不对称 性,并表现为两方面的影响: 对称电路的输出共模电平变化 以及输入共模电压变化在输出 端产生差模分量。 即使尾电流低频时输出阻抗很大, 高频时因 频率的增加导致等效输出阻抗减小, 因此共 模到差模的转换在高频时会变得严重, 同时 负载电阻及输入晶体管的失配也会导致共 模到差模的转换, 其中晶体管的失配通常比 负载电阻的失配影响大得多。
二
• 基本差动对
(W/L),△VIN AV 电路线性
最大输入差模电压△VIn与过驱动电压Von的关系
ISS,△VIn , AV 电路线性
∵
右式表明若增加△VID来使电路 具有更好的线性不可避免会使 M1和M2的过驱动 电压Von ,对于给定的ISS,这只能靠减小(W/L) (也即减小跨导,从而减 小放大器增益)来实现。Von 会使输入共模电压范围。
二
• 基本差动对 差动对的“虚地”概念
1. 在上图所示的对称电路中,其中D1和D2表示任何三端有 源器件,假定Vin1从V0变化到V0+△Vin,假定Vin2从V0变 化到 V0-△Vin,如果电路仍保持线性,则VP值不变。 2. 由上可知,差分对在差模小信号作用下,因VP值不变, 故P点成为“虚地”点,即差模小信号等效电路中P点可 看成“交流地”。
模拟CMOS集成电路设计 第4章 差动放大器
谈俊燕
本章重点
一 二 三 四 五
• 单端与差动的工作方式 • 基本差动对 • 共模响应 • MOS为负载的差动对 • 吉尔伯特单元
第2页
一
• 单端与差动的工作方式
共模电平
单端信号的参考电位为某一固定电位(通常为地电位), 差动信号定义为两个结点电位之差, 且这两个结点的 电位相对于某一固定电位大小相等,极性相反。在差 动信号中, 中心电位称为“共模”(CM)电平。 差动工作比单端工作有什么优点?
如何放大一个差分信号?
二
简单差动对
• 基本差动对
将两条相同的单端信号路径结合起 来,分别处理两个差动相位信号Vin1 和Vin2, 但当Vin1和Vin2存在很大的共 模干扰或各自的直流电平设置的不 Vin1和Vin2是差动相位信号 好时, 随着共模电平VinCM的变化, M1 和M2的偏置电流会变化, 从而导 致跨导和输出共模电平变化, 跨导 的变化会改变小信号增益, 输出共 模电平相对于理想值的偏离会降低 最大允许输出摆幅, 严重时会导致 输出端出现严重失真, 因此, 重要的 是应使M1 和M2的偏置电流受输入 输入共模电平对输出的影响 共模电平的影响尽可能小。 如何减小输入共模电平变化的影响呢?
M1和M2线性
ΙS S I SS + V b ≤ Vi n C M m a x ≤ V D D R D + VT N β1 ( 2 ) 2
二
• 基本差动对 M1饱和要求: V X ≥ Vi n C M - V T N
共模输入式表明, 输入共模电平越大, 允许输出的输出摆幅就越小。 幸运的是, 因运放通常需至少两 级放大才能获得实际可使用的 放大倍数, 因此对前级的摆幅要 求大大降低。
一
• 单端与差动的工作方式
小结:差分放大器的优点
VX- VY 电源噪声对单端电路产生的干扰 差动信号的优点: 1. 能有效抑制共模噪声。 差动输出时电 源噪声产生的 干扰消除了
2. 增大了输出电压摆幅(是单端输出的两倍)。 3. 偏置电路更简单(差分对可以直接耦和)、输出线性度更高。 4. 缺点是芯片面积和功耗略有增加, 但绝对物有所值!
例: 若两级运放AI=100, AII=400(即AV=92dB), 假定输出 V0=±10V, 则第二级的输入电压范围(也即第一级的输出 电压摆幅)仅需为: ±10V/400= ±25mV。第一级的小信号 输入范围仅为: ±25mV/100 =250μV。