统计调制方式
正交调制解调

多进制正交振幅调制技术及其在衰落信道下实现1.背景:在数字通信中.调制解调方式有三种基本方式:振幅键控、频移键控和相位键控。
但单纯的这三种基本方式在实际应用中都存在频谱利用率低、系统容量少等不足。
而在现代通信系统中,通信用户数量不仅在不断增加,人们亦不满足传统通信系统的单一语音服务,希望进行图像、数据等多媒体信息的通信。
因此,传统通信调制解调方式的容量已经越来越不能满足现代通信的要求。
近年来,如何在有限的频率资源中提供高容量、高速率和高质量的多媒体综合业务,是数字通信调制解调领域中一个令人关注的课题。
通过近十多年来的研究,分别针对无线通信信道和有线通信信道的特征,提出了不同的高频谱利用率和高质量的调制解调方案。
其中的QAM调制解调方案为:发送数据在比特/符号编码器内被分成速率各为原来1/2的两路信号,分别与一对正交调制分量相乘,求和后输出。
接收端完成相反过程,解调出两个正交码流.均衡器补偿由信道引起的失真,判决器识别复数信号并映射回二进制信号。
不过.采用QAM调制技术,信道带宽至少要等于码元速率,为了码元同步,还需要另外的带宽,一般要增加15%左右。
2.QAM基本原理:在QAM(正交幅度调制)中,数据信号由相互正交的两个载波的幅度变化表示。
模拟信号的相位调制和数字信号的PSK(相移键控)可以被认为是幅度不变、仅有相位变化的特殊的正交幅度调制。
因此,模拟信号相位调制和数字信号的PSK(相移键控)也可以被认为是QAM的特例,因为其本质上就是相位调制。
QAM是一种矢量调制,将输入比特先映射(一般采用格雷码)到一个复平面(星座)上,形成复数调制符号,然后将符号的I、Q分量(对应复平面的实部和虚部,也就是水平和垂直方向)采用幅度调制,分别对应调制在相互正交(时域正交)的两个载波(coswt和sinwt)上。
这样与幅度调制(AM)相比,其频谱利用率将提高1倍。
QAM是幅度、相位联合调制的技术,它同时利用了载波的幅度和相位来传递信息比特,因此在最小距离相同的条件下可实现更高的频带利用率,QAM最高已达到1024-QAM(1024个样点)。
LTE调制编码方式
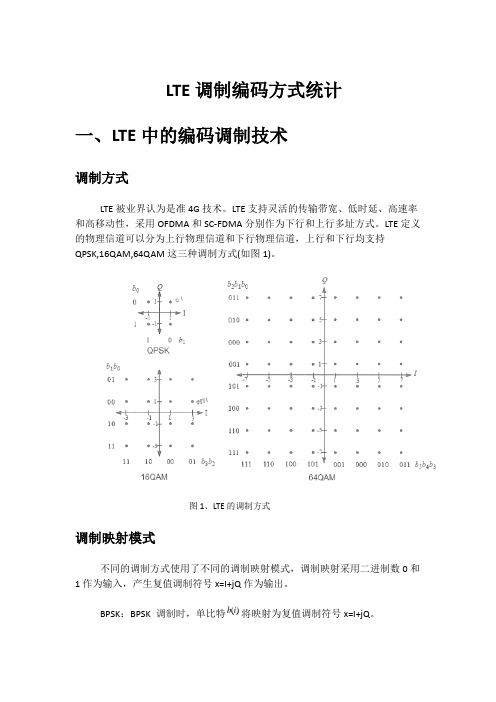
LTE调制编码方式统计一、LTE中的编码调制技术调制方式LTE被业界认为是准4G技术。
LTE支持灵活的传输带宽、低时延、高速率和高移动性,采用OFDMA和SC-FDMA分别作为下行和上行多址方式。
LTE定义的物理信道可以分为上行物理信道和下行物理信道,上行和下行均支持QPSK,16QAM,64QAM这三种调制方式(如图1)。
图1、LTE的调制方式调制映射模式不同的调制方式使用了不同的调制映射模式,调制映射采用二进制数0和1作为输入,产生复值调制符号x=I+jQ作为输出。
BPSK:BPSK 调制时,单比特)(i b将映射为复值调制符号x=I+jQ。
QPSK :QPSK 调制时, 两比特对)1(),(+i b i b 映射为复值调制符号x=I+jQ 。
16QAM :16QAM 调制时, 四比特对)3(),2(),1(),(+++i b i b i b i b 映射为复值调制符号x=I+jQ 。
64QAM :64QAM 调制时,六比特组)5(),4(),3(),2(),1(),(+++++i b i b i b i b i b i b 映射为复值调制符号x=I+jQ 。
不同信道的调试方式不同的信道对应的调制方式也各不相同。
物理上行信道上行物理共享信道基带信号处理步骤如下:加扰调制传输预编码资源单元映射SC-FDMA 信号产生图2:上行物理信道处理流程上行物理信道及其对应的调制方式如下:图3:上行物理信道及其调制方式物理下行信道下行物理信道的基带信号处理按下列步骤进行:层码字加扰调制调制加扰层映射预编码资源单元映射资源单元映射OFDM信号产生OFDM信号产生天线端口图4: 物理下行信道处理过程物理下行信道及其对应的调制方式如下:图5:下行物理信道及其调制方式自适应的调制和编码技术(AMC)不同的调制方式有不同的特征,低价调制增加了较多的冗余导致实际效率较低,但能够保证较高的可靠性,高阶调试具有较高的效率但可靠性差,对信道条件提出了较高的要求,只有在信道很好的条件下才能获得较高的增益。
2023年电赛d题 信号调制方式识别与参数估计装置

2023年电赛d题信号调制方式识别与参数估计装置2023年电赛d题信号调制方式识别与参数估计装置一、引言2023年电赛d题将会围绕信号调制方式识别与参数估计装置展开,这是一个极具挑战性的课题,也是当前通信与信息领域中备受关注的研究方向之一。
信号调制是指将要传输的数字信号通过一定的调制方式转换成模拟信号的过程,而参数估计装置则是用来对信号进行参数分析和估计的设备。
如何准确识别信号的调制方式,并进行有效的参数估计,是当前通信工程领域亟需解决的重要问题之一。
二、信号调制方式的识别1. 信号调制方式的分类在进行信号调制方式识别之前,首先需要对常见的信号调制方式有所了解。
常见的信号调制方式主要包括调幅调制(AM)、调频调制(FM)、调相调制(PM)、正交幅度调制(QAM)等。
这些调制方式在实际的通信系统中都有着广泛的应用,因此在识别过程中需要兼顾不同调制方式的特点和特征。
2. 识别方法与技术为了准确识别信号的调制方式,可以采用多种方法和技术。
常见的识别方法包括基于统计特征的识别方法、基于信号频谱特性的识别方法、基于人工智能算法的识别方法等。
其中,基于人工智能算法的识别方法具有较高的准确性和鲁棒性,是当前研究的热点之一。
三、参数估计装置的设计与应用1. 参数估计的重要性在实际的通信系统中,对信号参数进行准确的估计是保证通信质量的关键之一。
参数估计主要包括对信号的频率、幅度、相位等参数进行准确的估计。
只有通过有效的参数估计,才能保证信号的传输和接收的准确性和可靠性。
2. 参数估计装置的设计针对参数估计的需求,研究人员提出了基于不同算法和技术的参数估计装置。
这些装置通常包括信号采集模块、信号处理算法模块和参数估计输出模块等部分。
通过对信号的采集和处理,再结合合适的参数估计算法,可以实现对信号参数的有效估计。
四、个人观点与总结作为一名从事通信工程研究的工程师,我对信号调制方式识别与参数估计装置有着较为深刻的理解和实践经验。
多入多出(MIMO)系统的空时处理技术及调制方式

多入多出(MIMO)系统的空时处理技术及调制方式一.介绍随着实时多媒体通信、高速INTERNET接入等数据业务的发展,提高通信系统的速率和频带利用率已成为急待解决的问题。
在无线通信系统中,提高频带利用率的方法主要有智能天线技术、MIMO技术、多载波调制及自适应编码调制技术等。
其中,MIMO技术由于能有效利用多径衰落,巨大地提高系统容量和频带利用率而成为目前国内外通信研究的热点。
MIMO系统是指在发射端和接收端同时使用多个天线的通信系统。
MIMO系统的系统框图如图1所示。
图1 无线MIMO系统的框图从图1可以看出,比特流在经过编码、调制和空时处理(波束成行或空时编码)后,映射成不同的信息符号,从多个天线同时发射出去;在接收端用多个天线接收,并进行相应的解调、解码及空时处理。
1995年,Emre Telatar提出了加性高斯白噪声信道下,单用户MIMO 系统的系统容量[1]。
这篇文章的公式及仿真结果表明,在信道间衰落相互独立的条件下,多天线系统所能获得的系统容量大大超过单天线系统。
1996年,Foschini指出MIMO系统能通过空间复用提高系统容量,并给出了不同天线个数时的系统容量[2]。
在[3]中,Foschini 提出一种分层空时处理方案(BLAST),这种方案在发射、接收天线个数相等的情况下,在接收端采用干扰抑制的方法逐个提取接受信号,从而去除了不同空间信号间的干扰,使系统容量随着天线个数的增加而线形增加。
Winters在[4]中给出了瑞利衰落信道下采用天线分集时无线通信系统的容量,并讨论了在接收端进行线性或非线性接收对系统容量的影响。
这几篇文章有力地证明了MIMO系统对于提高系统容量的巨大潜力,从而奠定了MIMO系统发展的基础。
近年来,人们已从各个角度对MIMO系统进行了大量的研究。
例如,在各种信道状态下MIMO系统的容量问题[5]-[9],包括相关信道、频率选择性衰落信道、瑞利衰落信道等;MIMO系统的均衡问题[10]-[12];MIMO系统中的空时处理技术[13]-[16];MIMO系统的调制技术等[17]-[19]。
信号的三种调制方式

y ( x) c1 J ( x) c 2Y ( x)
齿轮故障特征
1.在各种齿轮故障诊断方法中,以振动检测为基础的齿 轮故 障诊断方法具有反映迅速、测量简便、实时性 强等优点。 2.齿轮发生断齿情况下其振动信号冲击能量达到最大, 均方值和峰值减小,表明齿轮传动接触减少,对经过磨合 期的齿轮,接触减少只可能是齿轮断齿或磨损厉害,但因 峭度和峰值指标增大,又表明齿轮存在较强的振动冲击, 而磨损厉害并不会出现较大的冲击振动信号,所以齿轮发 生的是 x] p( x)dx
4
式中x(t)为瞬时振幅,x杠为振幅均值,p(x)为概率密度, σ为标准差
1 K N
xi x i 1 t
N
4
式中xi为瞬时振幅,x杠为振幅均值,N为采样长度, σt为标准差。 峭度(Kurtosis)K是反映振动信号分布特性的数值 统计量,是4阶中心矩,峭度指标是无量纲参数, 由于它与轴承转速、尺寸、载荷等无关,对冲击信 号特别敏感,特别适用于表面损伤类故障、尤其是 早期故障的诊断。在轴承无故障运转时,由于各种 不确定因素的影响,振动信号的幅值分布接近正态 分布,峭度指标值K≈3;随着故障的出现和发展,振 动信号中大幅值的概率密度增加,信号幅值的分布 偏离正态分布,正态曲线出现偏斜或分散,峭度值 也随之增大。峭度指标的绝对值越大,说明轴承偏 离其正常状态,故障越严重,如当其K>8时,则很 可能出现了较大的故障。
4.均方根值由于对时间取平均值,因而适用于像磨损、表面裂 痕无规则振动之类的振幅值随时间缓慢变化的故障诊断。
X 1 N
x
1
N
i
2
5.齿轮偏心是指齿轮的中心与旋转轴的中心不重合,这种故障 往往是由于加工造成的。 (1)时域特征 当一对互相啮合的齿轮中有一个齿轮存在偏心时,其振动波 形由于偏心的影响被调制,产生调幅振动,图为齿轮有偏心 时的振动波形。
混合调制信号调制识别方法

混合调制信号调制识别方法
1.频谱分析法
频谱分析法是一种基于信号频谱特征的调制识别方法。
对于混合调制
信号,其频谱图呈现多个不同调制方式的频谱特征。
通过对频谱图进行分析,提取不同调制方式的频谱特征,可以实现对混合调制信号的调制识别。
常用的频谱分析方法包括傅里叶变换、小波变换等。
2.盲信号分离法
盲信号分离法是一种不需要事先知道混合调制信号调制方式的方法。
该方法通过分离混合调制信号中的各个子信号,并对各个子信号进行相应
的调制识别,从而实现对混合调制信号的调制识别。
常用的盲信号分离方
法包括独立成分分析、盲源分离等。
3.统计特征法
统计特征法是一种基于信号统计特征的调制识别方法。
混合调制信号
中各个子信号的统计特征往往不同,通过提取混合调制信号中各个子信号
的统计特征,并进行相应的分类和识别,可以实现对混合调制信号的调制
识别。
常用的统计特征包括均值、方差、自相关函数等。
4.时频分析法
时频分析法是一种综合利用信号的时域和频域特性进行调制识别的方法。
对于混合调制信号,其时域和频域特性呈现多个不同调制方式的特征。
通过对混合调制信号进行时频分析,提取时域和频域特性,可以实现对混
合调制信号的调制识别。
常用的时频分析方法包括短时傅里叶变换、时频
图等。
以上介绍了几种常用的混合调制信号调制识别方法。
不同的方法适用于不同的情况,各有优缺点。
在实际应用中,可以根据具体需求选择合适的方法进行调制识别,并结合多种方法进行综合分析,提高识别准确率。
bpsk qpsk误码率 -回复

bpsk qpsk误码率-回复BPSK和QPSK是两种常见的调制方式,它们在数字通信系统中被广泛应用。
而误码率是衡量一个通信系统性能的重要指标之一,本文将以“BPSK 和QPSK误码率”为主题,逐步解释它们之间的关系以及如何计算误码率。
第一部分:BPSK调制与误码率BPSK(二进制相移键控)是一种基本的数字调制方式,它通过改变载波相位来传输二进制信息。
比特“0”对应相位为0的载波,比特“1”对应相位为180的载波。
这种调制方式在通信系统中非常简单,但对于抗噪声能力较差。
误码率是在受到噪声干扰的情况下,接收端在检测比特值时错误的概率。
对于BPSK调制,我们可以利用统计学原理推导出误码率的表达式。
假设接收信号的噪声为加性高斯白噪声(AWGN),设噪声的功率谱密度为N0/2。
BPSK的误码率(Pe)可以通过以下公式计算:Pe = 0.5 * erfc(sqrt(Eb/N0))其中,Eb为比特能量,N0为噪声功率谱密度。
erfc(x)表示x的互补误差函数。
通过这个公式,我们可以看出误码率与信噪比(Eb/N0)有关。
信噪比的增加可以降低误码率,因为更高的信噪比意味着更强的信号和更小的噪声干扰。
第二部分:QPSK调制与误码率与BPSK不同,QPSK(四相移键控)调制可以同时传输两个比特,通过改变载波的相位和幅度来表示四种不同的信号状态。
具体而言,QPSK将四个可能的相位转换为一个信号点,每个信号点携带2比特信息。
类似于BPSK,我们可以推导出QPSK的误码率表达式。
在理想情况下,即仅受到AWGN噪声的影响,QPSK的误码率为:Pe = 1 - sqrt(1 - Q(2sqrt(Eb/N0)))其中,Q(x)表示高斯错误函数。
需要注意的是,这个表达式是在不考虑编码和纠错码等额外技术的情况下得到的。
不同于BPSK调制,QPSK的误码率与信噪比之间存在复杂的关系。
在低信噪比下,QPSK的误码率比BPSK低;而在高信噪比下,QPSK的误码率则比BPSK高。
nr的调制方式与解调算法

NR(New Radio)是第五代移动通信系统(5G)中使用的一种无线接入技术。
NR的调制方式和解调算法与之前的移动通信系统(如LTE)有所不同。
对于调制方式,NR采用了更高阶的调制技术,主要包括以下几种:
1. QPSK(Quadrature Phase Shift Keying):每个信号符号代表两个比特,通过改变相位来传输信息。
2. 16-QAM(Quadrature Amplitude Modulation):每个信号符号代表四个比特,通过改变相位和振幅来传输信息。
3. 64-QAM:每个信号符号代表六个比特,通过改变相位和振幅来传输信息。
此外,NR还引入了更高阶的调制方式,如256-QAM和512-QAM,以提供更高的数据传输速率。
对于解调算法,NR使用了更先进的解调技术,以适应更高的调制方式和更复杂的信道环境。
其中一些常见的解调算法包括:
1. 最小均方误差(Minimum Mean Square Error,MMSE):通过最小化接收信号和已知信道估计之间的均方误差来对信号进行解调。
2. 最大似然(Maximum Likelihood):基于统计概率模型,选择使接收信号和已知信道模型条件概率最大化的解调符号。
3. Viterbi解码:一种常用于纠错编码的解码算法,通过比较接收符号序列和编码器输出之间的差异,选择最可能的发送符号序列。
以上只是一些常见的调制方式和解调算法,实际上NR还使用了其他更多的技术和算法来提高系统性能和数据传输质量。
具体的调制方式和解调算法取决于具体的信道条件、传输要求和系统设计。
利用参数统计方法自动识别数字调制信号
职 教授 、 军优 秀教师,16 全 92年 毕业于 哈尔滨军事工程学 I 完雷达专业 .主要从事鼬 逮雷迭 、数字信号 处理 及应用技术 等方面的研究, 国内外重要刊物及会议上发表学术论宴 4 余篇 , 在 D
胡延平,李广森 ,李 纲,皇甫堪
< 国防 科技 大 学 电干科 学 与工程 学 院 .湖 南 长 沙 40 7 ) 10 3
摘
要: 自动调 制方式识别 应用 范围广泛 ,对于军 用软 件无 线 电侦 察接 收机更具有 十分重要的意
义 本文提 出了一种基于 统计 参数 识别信 号类型 的新方法 ,在满足 S R ̄ 1d N > 0 B前 条件下 ,可正 确 识别 2 S A K、M- M 、OA A M、P K、F K等 五种 信号。仿真试验表 明:计算简单 ,识别效 果 良好 。 S S 关键词 : 自动识别 ;信号分类 :软件无线 电 中围分类号:T 1 N9 1 文献标识码 :A 文章 编号 :10 -3 X (0 2 20 5 8 004 6 20 )0 -0 80
’ 作者简介:胡延平 (99 ) 16- ,男 ,山东章丘人 ,在读博士 生,19 92年于解放军信息工程大 学无线 电通 信工
程 系数字通信专业获学士学位 ,19 年一 19 年挤 南军 区技术愤察局任助理工程师 , 螂 年 考农 田防科大 92 95 电子科学 与工 程学院信息 与通 信工程 硕士研究生 ,19 9 8年获得硕士 学位,现正在 攻读博士学位 .研 究方 向 为软件无线电 、实 时信号处理 、通信新技术等 :李广 森 ( 9 3-.男, 山东聊城人 ,在读博 士生 ,19 17 ̄ ) . 9 5年
调制识别-实验报告
本科实验指导书实验名称:通信技术课程设计-调制识别开课学院:电子科学与工程学院指导教师:一、实验目的《通信技术课程设计》是针对通信类基础课程和专业课程的实践型课程,承担着从一般基础理论到实践应用的重要过渡。
加深理论基础、拓宽知识结构、增强动手能力、提高综合素质和培养创新意识。
二、实验原理通信侦察是通信对抗的前提与基础。
其基本含义是:使用通信接收设备截获敌方通信信号,分析其技术体制,了解其通信网的组成,必要时侦听其通信内容,以判明其属性。
先验信息及要求:1假设截获了一段数字通信的信号,要求确认该段数据所采用调制方式,并解调出最终的信息。
2映射方式已知。
3调制方式范围:MASK,MFSK,BPSK,QPSK,MQAM。
4数据除MFSK是100 sample/data外,其余均为基带信号,数据以“float”读入,I、Q两路交错。
方法:1. 最大似然法采用概率论和假设检验理论,分析信号的统计特性并推导出检验统计量,由判决准则实现调制模式的自动识别。
2. 模式识别法通过特征提取从调制信号中提取包含调制模式信息的参数,再通过模式匹配进行调制模式的自动识别。
具体的:1基于瞬时特征2基于累计量3基于分形理论4基于星座图聚类算法5其他,。
如基于支持矢量机三、实验结果我们组选用了两种方法尝试进行。
①基于瞬时特征②基于累计量1).首先是基于瞬时特征的识别针对共六种数字调制信号,提取了3个基于瞬时信息的特征参数:1.零中心归一化瞬时幅度之谱密度最大值2.零中心非弱信号段瞬时相位非线性分量绝对值的标准偏差3.零中心归一化瞬时幅度绝对值的标准偏差①零中心非弱信号段瞬时相位非线性分量绝对值的标准偏差公式:式中c是全部取样数据Ns中属于非弱信号值的个数,at是判断弱信号段的一个幅度判决门限电平,是经过零中心化处理后瞬时相位的非线性分量,而是瞬时相位,②.零中心归一化瞬时幅度之谱密度最大值.决策树识别①对于判别类属于(2ASK、4ASK、2PSK、4PSK)的信号,计算待识别信号的零中心非弱信号段瞬时相位非线性分量绝对值的标准偏差,与门限比较,将其分成两类:4PSK 和(2PSK、2ASK、4ASK);②算待识别信号的零中心归一化瞬时幅度之谱密度最大值,与门限比较,将待识别的信号分成两类:(2ASK、4ASK、2PSK、4PSK)和(2FSK、4FSK),即不恒定包络信号和恒包络的信号;程序:见附录①由于该程序对事例数据的判断出错,且经过几次判决门限的更改效果还是不尽人意,我们更改了实验方案。
基于高阶统计量的OFDM子载波调制识别算法
1 6 QAM b y u s i n g h i g h - o r d e r mo me n t — . b a s e d f e a t u r e a n d t h e n d i s t i n g u i s h e s BP S K a n d QP S K b y u s i n g h i g h - o r d e r c u mu l a n t - ・ b a s e d
Ke y wo r d s :0F DM ;s u b c a r r i e r ;h i g h — o r d e r c u mu l a n t ;h i g h — o r d e r mo me n t ;mo d u l a t i o n i d e n t i f i c a t i o n
A hi g h e r - o r d e r s t a t i s t i c s - b a s e d mo du l a t i o n i d e n t i f i c a t i o n a l g o r i t h m
f o r OFDM s u b c a r r i e r s
Zh u Ho n g b o,Zh a n g T i a n q i ,W a n g Zh i c h a o,L i J u n we i
QPSK、OQPSK、UQPSK信号调制方法识别

04
QPSK、OQPSK、UQPSK 调制方法的应用场景
QPSK调制方法的应用场景
数字电视广播
QPSK调制方法广泛应用于数字电视广播 ,提供高清、流畅的电视信号传输。
VS
卫星通信
在卫星通信领域,QPSK调制方法因其抗 干扰能力强和频谱利用率高等优点而被广 泛应用。
OQPSK调制方法的应用场景
移动通信
在此添加您的文本17字
优点
在此添加您的文本16字
缺点
在此添加您的文本16字
抗干扰能力强:OQPSK调制方式具有较好的抗干扰能力 ,能够在较为恶劣的通信环境下传输数据。
在此添加您的文本16字
频谱利用率较高:OQPSK调制方式能够较为有效地利用 频谱资源,提高传输效率。
在此添加您的文本16字
实现较为复杂:OQPSK调制方式的实现相对于QPSK来说 较为复杂,成本也较高。
详细描述
不同的调制方法需要使用不同的解调算法。通过尝试使用不同的解调算法对信号 进行解调,可以观察解调结果的质量,从而判断出调制方法。
基于统计特性的识别方法
总结词
通过分析信号的统计特性,可以识别 出调制方法。
详细描述
不同的调制方法会在信号的统计特性 上表现出不同的特征,例如信号的均 值、方差、概率分布等。通过分析这 些统计特性,可以判断出调制方法。
QPPSK、OQPSK、 UQPSK信号调制方法识别
目录
• QPSK、OQPSK、UQPSK调制 原理
• QPSK、OQPSK、UQPSK信号 特性
• QPSK、OQPSK、UQPSK调制 方法识别方法
目录
• QPSK、OQPSK、UQPSK调制 方法的应用场景
• QPSK、OQPSK、UQPSK调制 方法的优缺点比较
数字通信信号调制方式识别与参数估计

数字通信信号调制方式识别与参数估计(原创版)目录一、引言二、数字通信信号调制方式识别的背景和意义三、数字通信信号调制方式识别的方法1.基于功率谱离散余弦变换的信号调制类型识别与参数估值方法2.人工神经网络应用于通信信号数字调制方式自动识别的研究与实现3.多载波信号自动调制识别与参数估计4.数字通信信号识别研究与参数提取5.一种数字信号调制方式自动识别算法分析四、数字通信信号调制方式识别的发展趋势五、结论正文一、引言数字通信信号调制方式识别与参数估计是通信领域中的一个重要研究课题。
在非合作通信环境中,如电磁频谱监测、信号侦察和电子对抗等,通常需要对接收信号进行盲分析,识别调制方式、估计解调参数,为解调和信息还原提供支持。
随着通信技术的飞速发展,通信信号的体制和调制样式变得更加复杂多样,信号环境日趋密集,这也使得通信信号的调制识别变得更加困难。
因此,研究数字通信信号调制方式识别与参数估计具有重要的理论意义和实际应用价值。
二、数字通信信号调制方式识别的背景和意义数字通信信号调制方式识别是指在未知调制信息内容的前提下,判断出通信信号的调制方式,并估计出相应的调制参数。
随着通信技术的发展,数字通信信号调制方式识别在民用领域和军事领域得到了广泛应用,例如信号侦听、信号监测、软件无线电以及卫星通信等。
数字通信信号调制方式识别对于提高通信系统的安全性、可靠性和有效性具有重要意义。
三、数字通信信号调制方式识别的方法目前,数字通信信号调制方式识别的方法主要有以下几种:1.基于功率谱离散余弦变换的信号调制类型识别与参数估值方法:该方法可以降低噪声对信号调制类型识别准确率和估值准确率的影响。
2.人工神经网络应用于通信信号数字调制方式自动识别的研究与实现:该方法通过分析各种基本数字调制信号的瞬时幅度、瞬时频率、瞬时相位特性,提出了 5 个特征参数,形成了比较完备的能够区别 2ask、4as 等调制方式的特征参数集。
3.多载波信号自动调制识别与参数估计:正交频分复用(OFDM)等多载波调制技术凭借频带利用率高、抗多径衰落能力强以及实现简单等优点被广泛应用于宽带高速通信系统中。
PSK的调制解调

2PSK调制各点波形为:
图9 2PSK调制的各点时间波形
3.3.2 2PSK解调的simulink系统框图
2PSK解调的系统框图如下图所示。
其中,Sine Wave1与调制的参数设置相一致。AWGN Channel为信道中加入高斯白噪声,其信噪比的设置如图11所示。Error Rate Calculation用计算误码率。两个滤波器分别为带通滤波器和低通滤波器。Bipolar to Unipolar
(4)
其中
(5)
这里,g(t)是脉宽为 的单个矩形脉冲,而 的统计特性为
(6)
即发送二进制符号“0”时( 取+1), 取0相位;发送二进制符号“1”时( 取-1),取π相位。这种以载波的不同相位直接去表示相应二进制数字信号的调制方式,称为二进制绝对相移方式。调制方法有模拟调制和键控法,解调方法通常采用的是相干解调法。下面是2PSK的调制解调原理框图。
图7 Unipolar to Bipolar Converter信号参数设置
Sine Wave和Sine Wave1是相位相差π的正弦载波信号。其中0相位的表示码元信号1,π相位表示码元信号0,它们的参数设置分别如图8和图9所示。
图8 Sin wave信号的参数设置
图8 Sin wave1信号的参数设置
1 引言
通信按照传统的理解就是信息的传输。在当今高度信息化的社会,信息和通信已成为现代社会的命脉。信息作为一种资源,只有通过广泛的传播与交流,才能产生利用价值,促进社会成员之间的合作,推动社会生产力的发展,创造出巨大的经济效益。而通信作为传输信息的手段或方式,与传感技术,计算机技术相互融合,已为21世纪国际社会和世界经济发展的强大推动力。
PSK调制和解调的基本原理回顾

1第1章 PSK 调制和解调的基本原理回顾我们这里设计的课题(PSK 调制与解调)涉及到两种:2PSK 和2DPSK 1.1 三种数字调制的比较数字调制就是用载波信号的某些离散状态来表征所传送的信号,在接收端也对载波信号的离散调制参量进行检测。
和模拟信号一样,数字调制也有调幅、调频和调相三种基本形式,即有振幅键控(ASK )、移频键控(FSK )和移相键控(PSK )三种基本形式。
如下图所示:图1-1 三种调制方式图各种调制方式的对比分析。
由于噪声干扰的影响最终表现在收方恢复信码时的误码率性能上,所以系统的抗噪声性能可以用系统平均的误码率来表征。
即用各自系统的平均误码率P e 对广义信噪比ε的曲线来表示系统的抗噪声性能。
ε为输入信号每个码元的平均能量与输入噪声的单边功率谱(双边谱的二倍)密度之比,即称广义信噪比。
在此种条件下,可以用相同ε值或相同P e 去比较误码率P e 或ε的大小,从而合理地比较各种键控方式。
(1)ASK 相干解调 P e =1/2erfc[2ε]ε=A 2T/n 0(2)ASK 非相干解调P e ≈[1+πε21].e-ε/2(3)FSK 相干解调P e =1/2erfc[2ε](4)FSK(5)PSK(6)DPSK的意义.令2PSKe0(t)特性为:a也就是说,在一个码元持续时间T s内,e0(t)为:2cosωc t ,概率为Pe0(t)=-cosωc t ,概率为(1-P)即发送二进制0时(a n取+1)e0(t)取0相位;发送二进制符号1时(a n取-1)e0(t)取π相位。
调制可以采用模拟调制的方式产生2PSK,即2PSK信号可通过乘法器来得到。
也可以采用数字键控的方式产生。
调制原理见下:(a)模拟调制(b) 数字键控调制1-3 2PSK调制原理图1.3 2DPSK调制原理相对移相,就是利用载波相位的相对值来传递信息,也就是利用前后码元载波相位的相对变化来传递信息,所以也称为“差分移相”。
基本数字调制
基本数字调制什么是数字调制?在通信领域中,数字调制(Digital Modulation)是一种将数字信号转换成模拟信号的过程。
在数字通信中,信息以离散的形式传输,因此需要将数字信号转换为模拟信号以便在信道中传输。
数字调制技术所做的就是通过将数字信号调制到高频载波上,使其能够在信道中传输。
数字调制可以分为基带调制和带通调制两种方式。
基带调制是将数字信号直接调制到基带频率上,这种方式适用于短距离传输。
而带通调制则是将数字信号调制到射频频率带上,这样可以实现远距离传输和抗干扰能力强。
基本数字调制的分类基本数字调制主要包括以下四种调制方式:1.ASK(Amplitude Shift Keying)调制: ASK调制是一种将数字信号调制到载波上的调制方式。
在ASK调制中,载波的幅度会根据数字信号的取值而变化。
即当传输的比特为1时,载波的幅度为A,当传输的比特为0时,载波的幅度为0。
这种调制方式简单易实现,但对噪声和干扰比较敏感。
2.FSK(Frequency Shift Keying)调制: FSK调制是一种将数字信号调制到载波频率上的调制方式。
在FSK调制中,载波的频率会根据数字信号的取值而改变。
即当传输的比特为1时,载波的频率为f1,当传输的比特为0时,载波的频率为f2。
这种调制方式在抗干扰能力方面较好,但调制复杂度较高。
3.PSK(Phase Shift Keying)调制: PSK调制是一种将数字信号调制到载波相位上的调制方式。
在PSK调制中,载波的相位会根据数字信号的取值而改变。
即当传输的比特为1时,载波的相位为θ1,当传输的比特为0时,载波的相位为θ2。
这种调制方式适用于高速传输,但对抗多径传播的干扰较为敏感。
4.QAM(Quadrature Amplitude Modulation)调制: QAM调制是一种将数字信号同时调制到载波的幅度和相位上的调制方式。
在QAM调制中,载波的幅度和相位会根据数字信号的取值而变化。
数字通信信号调制方式识别与参数估计

标题:深度剖析数字通信信号调制方式识别与参数估计摘要:在数字通信领域,信号调制作为一种关键技术,其识别与参数估计对于信息传输的质量至关重要。
本文将深度剖析数字通信信号调制方式识别与参数估计的相关概念、技术和应用,帮助读者全面理解该主题,并为实际应用提供有价值的参考。
正文:1.概述随着信息技术和通信技术的飞速发展,数字通信已经成为现代通信系统的重要组成部分。
在数字通信系统中,信号调制是将数字信息转换成模拟信号或者数字信号,以便在传输过程中能够适应信道的特性。
对数字通信信号调制方式的识别与参数估计具有重要意义。
2.数字通信信号调制方式概述在数字通信中,常见的信号调制方式包括调幅调制(AM)、调频调制(FM)、调相调制(PM)、正交振幅调制(QAM)等。
每种调制方式都有其特定的优点和适用范围,因此对不同调制方式的识别和参数估计是十分必要的。
3.数字通信信号调制方式识别方法为了准确识别数字通信信号的调制方式,现代通信系统中引入了许多智能算法和技术。
其中,常用的方法包括基于统计特性的识别方法、基于神经网络的识别方法、基于模糊逻辑的识别方法等。
这些方法都能够在一定程度上提高信号调制方式的识别准确度。
4.数字通信信号调制方式参数估计除了识别信号调制方式外,对信号调制的参数进行准确估计同样至关重要。
参数估计的目标是确定信号的频率、相位、幅度等关键参数,以便在解调和信号处理过程中能够重构原始信息。
常用的参数估计方法包括最大似然估计、最小均方误差估计等。
5.实际应用与挑战数字通信信号调制方式识别与参数估计是数字通信系统中的重要环节,其准确性和效率直接关系到信息传输的质量和稳定性。
在实际应用中,一些挑战包括复杂噪声环境下识别的困难、多信号混叠导致参数估计的复杂性等。
6.结论与展望通过对数字通信信号调制方式识别与参数估计的深度剖析,我们可以深入理解其在数字通信系统中的重要性和应用。
未来,随着人工智能和大数据技术的不断发展,相信会有更多高效、智能的识别与估计方法应运而生,为数字通信技术的发展带来新的突破和进步。
数字信号的调制与解调
前言
当今社会已经步入信息时代,在各种信息技术中,信息的传输及通信起着支 撑作用。而对于信息的传输,数字通信已经成为重要的手段。因此,数字信号的 调制就显得非常重要。
调制分为基带调制和带通调制。不过一般狭义的理解调制为带通调制。带通 调制通常需要一个正弦波作为载波,把基带信号调制到这个载波上,使这个载波 的一个或者几个参量上载有基带数字信号的信息,并且还要使已调信号的频谱倒 置适合在给定的带通信道中传输。特别是在无线电通信中,调制是必不可少的, 因为要使信号能以电磁波的方式发送出去,信号所占用的频带位置必须足够高, 并且信号所占用的频带宽度不能超过天线的的通频带,所以基带信号的频谱必须 用一个频率很高的载波调制,使期带信号搬移到足够高的频率上,才能够通过天 线发送出去。
系统的性能好坏取决于传输信号的误码率,而误码率不仅仅与信道、接 收方法有关还和发送端采用的调制方式有很大的关系。本文主要对 2PSK 信号的 原理及其相干解调系统性能进行了分析和仿真,这样能让我们对数字调制方式有 一个更清楚的认识。
1
一 设计原理
基于滑动平均和高阶统计量的数字调制识别
文章编号 :N 1 642 o )4 05 4 C 5 —19 (06 o —0 1 —0
基 于 滑 动 平 均 和 高 阶统 计 量 的数 字调 制 识 别
胡 敏 易 波 王世练 , ,
(. 1湖南 大学计算机与通信学院 , 长沙 4 08 ; . 10 2 2 国防科技大学 电子科学与工程学院 , 长沙 4 07 ) 103
Hi h r St tsi s g e a itc
H Mi Y o , AN S il n U n , I B W G h —i 2 a ( . o e eo C m u r n m u i t n H nn U i ri , h nsa 10 2 C i ; . a o a U vr t o 1 C l g f l p t dC m n a o , u a n e t C a g 0 8 , h a 2 N t nl n e i o ea o ci v sy h4 n i i sy f
p r r n e i o NR rn e w i h i a d n i o ri u k o n b fr h e me o a ef ma c n lw S a g hl tesg l a os p we s n n w o e.T td c n o e n n e e h s p rs eGa si ht os db ac lt i l .T i ag rh i lmiae d v r e u p es t u s w i n i a ec uae smpy h sl oi m iu n t a ei d h n a e en l d t sl d n i f
u i g smua in e p r n s sn i l t x i o e me t .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
调制方式按照调制信号的性质分为模拟调制和数字调制两类;按照载波的形式分为连续波调制和脉冲调制两类。
模拟调制有调幅(AM)、调频(FM)和调相(PM)。
数字调制有振幅键控(ASK)、移频键控(FSK)、移相键控(PSK)和差分移相键控(DPSK)等。
脉冲调制有脉幅调制(PAM)、脉宽调制(PDM)、脉频调制(PFM)、脉位调制(PPM)、脉码调制(PCM)和增量调制(ΔM)。
按照传输特性,调制方式又可分为线性调制和非线性调制。
广义的线性调制,是指已调波中被调参数随调制信号成线性变化的调制过程。
狭义的线性调制,是指把调制信号的频谱搬移到载波频率两侧而成为上、下边带的调制过程。
此时只改变频谱中各分量的频率,但不改变各分量振幅的相对比例,使上边带的频谱结构与调制信号的频谱相同,下边带的频谱结构则是调制信号频谱的镜像。
狭义的线性调制有调幅(AM)、抑制载波的双边带调制(DSB-SC)和单边带调制(SSB)。
1、模拟调制一般指调制信号和载波都是连续波的调制方式。
它有调幅、调频和调相三种基本形式。
(1)调幅(AM):用调制信号控制载波的振幅,使载波的振幅随着调制信号变化。
已调波称为调幅波。
调幅波的频率仍是载波频率,调幅波包络的形状反映调制信号的波形。
调幅系统实现简单,但抗干扰性差,传输时信号容易失真。
(2)调频(FM):用调制信号控制载波的振荡频率,使载波的频率随着调制信号变化。
已调波称为调频波。
调频波的振幅保持不变,调频波的瞬时频率偏离载波频率的量与调制信号的瞬时值成比例。
调频系统实现稍复杂,占用的频带远较调幅波为宽,因此必须工作在超短波波段。
抗干扰性能好,传输时信号失真小,设备利用率也较高。
(3)调相(PM):用调制信号控制载波的相位,使载波的相位随着调制信号变化。
已调波称为调相波。
调相波的振幅保持不变,调相波的瞬时相角偏离载波相角的量与调制信号的瞬时值成比例。
在调频时相角也有相应的变化,但这种相角变化并不与调制信号成比例。
在调相时频率也有相应的变化,但这种频率变化并不与调制信号成比例。
在模拟调制过程中已调波的频谱中除了载波分量外在载波频率两旁还各有一个频带,因调制而产生的各频率分量就落在这两个频带之内。
这两个频带统称为边频带或边带。
位于比载波频率高的一侧的边频带,称为上边带。
位于比载波频率低的一侧的边频带,称为下边带。
在单边带通信中可用滤波法、相移法或相移滤波法取得调幅波中一个边带,这种调制方法称为单边带调制(SSB)。
单边带调制常用于有线载波电话和短波无线电多路通信。
在同步通信中可用平衡调制器实现抑制载波的双边带调制(DSB-SC)。
在数字通信中为了提高频带利用率而采用残留边带调制(VSB),即传输一个边带(在邻近载波的部分也受到一些衰减)和另一个边带的残留部分。
在解调时可以互相补偿而得到完整的基带。
2、数字调制一般指调制信号是离散的,而载波是连续波的调制方式。
它有四种基本形式:振幅键控、移频键控、移相键控和差分移相键控。
①振幅键控(ASK):用数字调制信号控制载波的通断。
如在二进制中,发0时不发送载波,发1时发送载波。
有时也把代表多个符号的多电平振幅调制称为振幅键控。
振幅键控实现简单,但抗干扰能力差。
②移频键控(FSK):用数字调制信号的正负控制载波的频率。
当数字信号的振幅为正时载波频率为f1,当数字信号的振幅为负时载波频率为f2。
有时也把代表两个以上符号的多进制频率调制称为移频键控。
移频键控能区分通路,但抗干扰能力不如移相键控和差分移相键控。
③移相键控(PSK):用数字调制信号的正负控制载波的相位。
当数字信号的振幅为正时,载波起始相位取0;当数字信号的振幅为负时,载波起始相位取180°。
有时也把代表两个以上符号的多相制相位调制称为移相键控。
移相键控抗干扰能力强,但在解调时需要有一个正确的参考相位,即需要相干解调。
④差分移相键控(DPSK):利用调制信号前后码元之间载波相对相位的变化来传递信息。
在二进制中通常规定:传送1时后一码元相对于前一码元的载波相位变化180°,而传送0时前后码元之间的载波相位不发生变化。
因此,解调时只看载波相位的相对变化。
而不看它的绝对相位。
只要相位发生180°跃变,就表示传输1。
若相位无变化,则传输的是0。
差分移相键控抗干扰能力强,且不要求传送参考相位,因此实现较简单。
3、脉冲调制脉冲调制有两种含义:第一种是指用调制信号控制脉冲本身的参数(幅度、宽度、相位等),使这些参数随调制信号变化。
此时,调制信号是连续波,载波是重复的脉冲序列。
第二种是指用脉冲信号控制高频振荡的参数。
此时,调制信号是脉冲序列,载波是高频振荡的连续波。
通常所说的脉冲调制都是指上述第一种情况。
脉冲调制可分为模拟式和数字式两类。
模拟式脉冲调制是指用模拟信号对脉冲序列参数进行调制,有脉幅调制、脉宽调制、脉位调制和脉频调制等。
数字式脉冲调制是指用数字信号对脉冲序列参数进行调制,有脉码调制和增量调制等。
由于脉冲序列占空系数很小,即一个周期的绝大部分时间内信号为0值,因而可以插入多路其他已调脉冲序列,实现时分多路传输。
已调脉冲序列还可以用各种方法去调制高频振荡载波。
常用的脉冲调制有以下几种。
(1)脉幅调制(PAM):用调制信号控制脉冲序列的幅度,使脉冲幅度在其平均值上下随调制信号的瞬时值变化。
这是脉冲调制中最简单的一种。
脉幅调制是A.H.里夫在20世纪30年代发明的,在第二次世界大战中期已付之实用。
但后来发现,脉幅调制的已调波在传输途径中衰减,抗干扰能力差,所以现在很少直接用于通信,往往只用作连续信号采样的中间步骤。
(2)脉宽调制(PDM):用调制信号控制脉冲序列中各脉冲的宽度,使每个脉冲的持续时间与该瞬时的调制信号值成比例。
此时脉冲序列的幅度保持不变,被调制的是脉冲的前沿或后沿,或同时是前后两沿,使脉冲持续时间发生变化。
脉宽调制也是20世纪30年代里夫发明的。
但在无线电通信中一般不用脉宽调制,因为此时发射机的平均功率要不断地变化。
(3)脉位调制(PPM):用调制信号控制脉冲序列中各脉冲的相对位置(即相位),使各脉冲的相对位置随调制信号变化。
此时脉冲序列中脉冲的幅度和宽度均保持不变。
脉位调制在第二次世界大战中期已付之实用。
脉位调制的传输性能较好,常用于视距微波中继通信系统。
(4)脉频调制(PFM):用调制信号控制脉冲的重复频率,即单位时间内脉冲的个数,使脉冲的重复频率随调制信号变化。
此时脉冲序列中脉冲的幅度和宽度均保持不变。
主要用于仪表测量等方面,很少直接用于无线电通信。
(5)脉码调制(PCM):1937年脉幅调制和脉宽调制的发明者A.H.里夫提出用脉冲的有无的组合来传递声音,后来把这种方法称为脉码调制。
但脉码调制到20世纪50年代才开始实用化。
脉码调制有三个过程:采样、量化和编码。
即先对信号进行采样,并对采样值进行量化(整量化),再对经过采样和量化后的信号幅度进行编码,因此脉码调制的本质不是调制,而是数字编码,所以能充分保证传输质量。
由编码得到的数字信号可根据需要再对高频振荡载波进行调制。
脉码调制不是用改变脉冲序列的参数来传输信息,而是用参数固定的脉冲的不同组合来传递信息,因此抗干扰能力强,失真很小,是现代通信技术的发展方向。
(6)增量调制(ΔM):增量调制是一种特殊的脉码调制,它不是对信号本身进行采样、量化和编码,而是对信号相隔一定重复周期的瞬时值的增量进行采样、量化和编码。
现在已有多种增量调制方法,其中最简单的一种,是在每一采样瞬间当增量值超过某一规定值时发正脉冲,小于规定值时发负脉冲。
这样每个码组只有一个脉冲,故为二进制一位编码,每个码组不是表示信号的幅度,而是表示幅度的增量。
这种增量调制信号的解调也很简单,只要将收到的脉冲序列进行积分和滤波即可复原,因此编码和解码设备都比较简单。
1.AM调制解调A o cos(ѡc t)仿真:ts=1.e-4;t=-0.04:ts:0.04 ;fc=500;sigma=0.3 ;% 生成调制信号m_sig=tripuls(t+0.01,0.02)-tripuls(t-0.01,0.02);%调整信号m_sig由两个三角脉冲波形左右平移后叠加生成% 调制过程s_am=(1+m_sig).*cos(2*pi*fc*t)+sigma*randn(size(t));%AM信号由调制信号m_sig叠加直流分量后乘以载波并混以噪声形成。
cos(2*pi*fc*t);% 载波信号,fc为载波频率。
randn(size(t));%代表服从正态分布的噪声。
% 产生本地接收载波s_carr =cos(2*pi*fc*t);% 同步解调s_dem=s_am.*s_carr;% 定义lfft变量Lfft=length(t);%取时间区间的长度并赋值给Lfft。
Lfft=2^ceil(log2(Lfft)+1);%将Lfft 重新转化成为更大的偶数Lfft 。
ceil ;%向正无穷大的方向取整% 绘制解调后信号频谱S_dem=fftshift(fft(s_dem,Lfft)/(length(t)));% 生成低通滤波器h=fir1(60,[B_m*ts]);%设计低通滤波器频域相应,其中滤波器阶数60,截至频率75Hz 。
% 低通滤波s_rec=filter(h,1,s_dem);%理想低通滤波器filter 滤除s_dem 中的高频分量得恢复信号s_rec 。
% 绘制恢复信号频谱S_rec=fftshift(fft(s_rec,Lfft)/(length(t)));生成的图形:(1)发送信号波形和图谱波形 频谱(2)载波信号机波形波形 频谱t(sec)m (t)f(Hz)M (f)x 10-3t(sec)s c a r r ( t)f(Hz)S c a r r ( f )(3)AM 信号和频谱波形 频谱(4)相干解调波形和频谱波形频谱(5)恢复信号的波形和频谱波形 频谱2.FM 仿真t(sec)s A M ( t)f(Hz)S A M ( f )t(sec)s r e c t ( t )f(Hz)S r e c t ( f)f(Hz)Sr e c ( f )t(sec) s r e c ( t )代码:%FM调制解调系统.m%频率调制与解调的Matlab演示源程序%可以任意改原调制信号函数m(t)%信息工程陈丽丹07323202 %·*·*·*·*·*·*·*·*·*·*·*·*·*·*·*·%*****************初始化******************echo offclose allclear allclc%***************************************** %·*·*·*·*·*·*·*·*·*·*·*·*·*·*·*·%****************FM调制*******************dt=0.001; %设定时间步长t=0:dt:1.5; %产生时间向量am=5; %设定调制信号幅度fm=5; %设定调制信号频率mt=am*cos(2*pi*fm*t); %生成调制信号fc=50; %设定载波频率ct=cos(2*pi*fc*t); %生成载波kf=10; %设定调频指数int_mt(1)=0;for i=1:length(t)-1int_mt(i+1)=int_mt(i)+mt(i)*dt; %求信号m(t)的积分end %调制,产生已调信号sfm=am*cos(2*pi*fc*t+2*pi*kf*int_mt); %调制信号%***************************************** %·*·*·*·*·*·*·*·*·*·*·*·*·*·*·*·%*************添加高斯白噪声**************sn1=10; %设定信躁比(小信噪比)sn2=30; %设定信躁比(大信噪比)sn=0; %设定信躁比(无信噪比)db=am^2/(2*(10^(sn/10))); %计算对应的高斯白躁声的方差n=sqrt(db)*randn(size(t)); %生成高斯白躁声nsfm=n+sfm; %生成含高斯白躁声的已调信号(信号通%过信道传输)%***************************************** %·*·*·*·*·*·*·*·*·*·*·*·*·*·*·*·%****************FM解调*******************for i=1:length(t)-1 %接受信号通过微分器处理diff_nsfm(i)=(nsfm(i+1)-nsfm(i))./dt;enddiff_nsfmn = abs(hilbert(diff_nsfm)); %hilbert变换,求绝对值得到瞬时幅度(包络检波)zero=(max(diff_nsfmn)-min(diff_nsfmn))/2;diff_nsfmn1=diff_nsfmn-zero;%***************************************** %·*·*·*·*·*·*·*·*·*·*·*·*·*·*·*·%**************时域到频域转换**************ts=0.001; %抽样间隔fs=1/ts; %抽样频率df=0.25; %所需的频率分辨率,用在求傅里叶变换%时,它表示FFT的最小频率间隔%*****对调制信号m(t)求傅里叶变换*****m=am*cos(2*pi*fm*t); %原调信号fs=1/ts;if nargin==2n1=0;elsen1=fs/df;endn2=length(m);n=2^(max(nextpow2(n1),nextpow2(n2)));M=fft(m,n);m=[m,zeros(1,n-n2)];df1=fs/n; %以上程序是对调制后的信号u求傅里变换M=M/fs; %缩放,便于在频铺图上整体观察f=[0:df1:df1*(length(m)-1)]-fs/2; %时间向量对应的频率向量%************对已调信号u求傅里变换**********fs=1/ts;if nargin==2n1=0;elsen1=fs/df;endn2=length(sfm);n=2^(max(nextpow2(n1),nextpow2(n2)));U=fft(sfm,n);u=[sfm,zeros(1,n-n2)];df1=fs/n; %以上是对已调信号u求傅里变换U=U/fs; %缩放%******************************************%***************************************** %·*·*·*·*·*·*·*·*·*·*·*·*·*·*·*·%***************显示程序******************disp('按任意键可以看到原调制信号、载波信号和已调信号的曲线')pause%**************figure(1)******************figure(1)subplot(3,1,1);plot(t,mt); %绘制调制信号的时域图xlabel('时间t');title('调制信号的时域图');subplot(3,1,2);plot(t,ct); %绘制载波的时域图xlabel('时间t');title('载波的时域图');subplot(3,1,3);plot(t,sfm); %绘制已调信号的时域图xlabel('时间t');title('已调信号的时域图');%******************************************disp('按任意键可以看到原调制信号和已调信号在频域内的图形')pause%************figure(2)*********************figure(2)subplot(2,1,1)plot(f,abs(fftshift(M))) %fftshift:将FFT中的DC分量移到频谱中心xlabel('频率f')title('原调制信号的频谱图')subplot(2,1,2)plot(f,abs(fftshift(U)))xlabel('频率f')title('已调信号的频谱图')%******************************************disp('按任意键可以看到原调制信号、无噪声条件下已调信号和解调信号的曲线')pause%**************figure(3)******************figure(3)subplot(3,1,1);plot(t,mt); %绘制调制信号的时域图xlabel('时间t');title('调制信号的时域图');subplot(3,1,2);plot(t,sfm); %绘制已调信号的时域图xlabel('时间t');title('无噪声条件下已调信号的时域图');nsfm=sfm;for i=1:length(t)-1 %接受信号通过微分器处理diff_nsfm(i)=(nsfm(i+1)-nsfm(i))./dt;enddiff_nsfmn = abs(hilbert(diff_nsfm)); %hilbert变换,求绝对值得到瞬时幅度(包络检波)zero=(max(diff_nsfmn)-min(diff_nsfmn))/2;diff_nsfmn1=diff_nsfmn-zero;subplot(3,1,3); %绘制无噪声条件下解调信号的时域图plot((1:length(diff_nsfmn1))./1000,diff_nsfmn1./400,'r');xlabel('时间t');title('无噪声条件下解调信号的时域图');%*****************************************disp('按任意键可以看到原调制信号、小信噪比高斯白噪声条件下已调信号和解调信号已调信号的曲线')pause%**************figure(4)******************figure(4)subplot(3,1,1);plot(t,mt); %绘制调制信号的时域图xlabel('时间t');title('调制信号的时域图');db1=am^2/(2*(10^(sn1/10))); %计算对应的小信噪比高斯白躁声的方差n1=sqrt(db1)*randn(size(t)); %生成高斯白躁声nsfm1=n1+sfm; %生成含高斯白躁声的已调信号(信号通%过信道传输)for i=1:length(t)-1 %接受信号通过微分器处理diff_nsfm1(i)=(nsfm1(i+1)-nsfm1(i))./dt;enddiff_nsfmn1 = abs(hilbert(diff_nsfm1)); %hilbert变换,求绝对值得到瞬时幅度(包络检波)zero=(max(diff_nsfmn)-min(diff_nsfmn))/2;diff_nsfmn1=diff_nsfmn1-zero;subplot(3,1,2);plot(1:length(diff_nsfm),diff_nsfm); %绘制含小信噪比高斯白噪声已调信号的时域图xlabel('时间t');title('含小信噪比高斯白噪声已调信号的时域图');subplot(3,1,3); %绘制含小信噪比高斯白噪声解调信号的时域图plot((1:length(diff_nsfmn1))./1000,diff_nsfmn1./400,'r');xlabel('时间t');title('含小信噪比高斯白噪声解调信号的时域图');%*****************************************disp('按任意键可以看到原调制信号、大信噪比高斯白噪声条件下已调信号和解调信号已调信号的曲线')pause%**************figure(5)******************figure(5)subplot(3,1,1);plot(t,mt); %绘制调制信号的时域图xlabel('时间t');title('调制信号的时域图');db1=am^2/(2*(10^(sn2/10))); %计算对应的大信噪比高斯白躁声的方差n1=sqrt(db1)*randn(size(t)); %生成高斯白躁声nsfm1=n1+sfm; %生成含高斯白躁声的已调信号(信号通过信道传输)for i=1:length(t)-1 %接受信号通过微分器处理diff_nsfm1(i)=(nsfm1(i+1)-nsfm1(i))./dt;enddiff_nsfmn1 = abs(hilbert(diff_nsfm1)); %hilbert变换,求绝对值得到瞬时幅度(包%络检波)zero=(max(diff_nsfmn)-min(diff_nsfmn))/2;diff_nsfmn1=diff_nsfmn1-zero;subplot(3,1,2);plot(1:length(diff_nsfm1),diff_nsfm1); %绘制含大信噪比高斯白噪声已调信号%的时域图xlabel('时间t');title('含大信噪比高斯白噪声已调信号的时域图');subplot(3,1,3); %绘制含大信噪比高斯白噪声解调信号%的时域图plot((1:length(diff_nsfmn1))./1000,diff_nsfmn1./400,'r');xlabel('时间t');title('含大信噪比高斯白噪声解调信号的时域图');%*****************************************%******************结束*******************仿真图:3.2FSK代码:a=randint(1,16);t=0.0001:0.001:1;inisig=a(ceil(t./(1/15)));subplot(5,1,1)plot(t,inisig)axis([0,1,-1.5,1.5])title('原信号');%调制f1=200;f2=100;carrier1=cos(2*pi*f1*t);carrier2=cos(2*pi*f2*t);modulation_wave=zeros(1,length(t));for i=1:length(t)if(inisig(i)==0)modulation_wave(i)=carrier1(i);elsemodulation_wave(i)=carrier2(i);endendsubplot(5,1,2)plot(t,modulation_wave)axis([0,1,-1.5,1.5])title('调制信号');%2fsk 信号加噪noise_wave=awgn(modulation_wave,100);%设计带通滤波器[num1 den1]=butter(10,[2*0.9*f1*pi,2*1.1*f1*pi],'s');[num2 den2]=butter(10,[2*0.9*f2*pi,2*1.1*f2*pi],'s');daiout1_h=tf(num1,den1);daiout2_h=tf(num2,den2);unmodulation_wave1=lsim(daiout1_h,noise_wave,t); unmodulation_wave2=lsim(daiout2_h,noise_wave,t);%2fsk信号相干解调unmodulation_wave1_g=unmodulation_wave1'.*(carrier1); unmodulation_wave2_g=unmodulation_wave2'.*(carrier2);%设计低通滤波器wp=2*pi*90;ws=2*pi*120;rp=1;rs=100;[N Wn]=buttord(wp,ws,rp,rs,'s');[B A]=butter(N,Wn,'s');h=tf(B,A);dsy1=lsim(h,unmodulation_wave1_g,t);dsy2=lsim(h,unmodulation_wave2_g,t);subplot(5,1,3);plot(t,dsy1);title('经过一路低通滤波器后的信号');subplot(5,1,4);plot(t,dsy2);title('经过二路低通滤波器后的信号');for i=1:length(dsy1)if dsy1(i)>dsy2(i)dsy(i)=0;else dsy(i)=1;endendsubplot(5,1,5);plot(t,dsy);axis([0 1.2 -1.2 1.2])title('解调信号');%观察原信号频谱inisig_spectrum=fftshift(fft(inisig));maxf=1/0.001;f=-maxf/2:maxf/2-1;figuresubplot(5,1,1);plot(f,inisig_spectrum)title('观察原信号频谱');%观察调制信号频谱modulation_spectrum=fftshift(fft(modulation_wave));maxf=1/0.001;f=-maxf/2:maxf/2-1;subplot(5,1,2);plot(f,modulation_spectrum)title('观察调制信号频谱');%观察带通信号频谱unmodulation1_spectrum=fftshift(fft(unmodulation_wave1)); maxf=1/0.001;f=-maxf/2:maxf/2-1;subplot(5,1,4);plot(f,unmodulation1_spectrum)title('观察带通信号150频谱');unmodulation2_spectrum=fftshift(fft(unmodulation_wave2)); maxf=1/0.001;f=-maxf/2:maxf/2-1;subplot(5,1,3);plot(f,unmodulation2_spectrum)title('观察带通信号100频谱');length(unmodulation_wave1)%观察低通滤波器频谱dsy_spectrum=fftshift(fft(dsy));maxf=1/0.001;f=-maxf/2:maxf/2-1;subplot(5,1,5);plot(f,dsy_spectrum)title('观察低通信号100频谱')仿真图:4.2ASK观察原信号频谱-500-400-300-200-1000100200300400500观察调制信号频谱-500-400-300-200-1000100200300400500观察带通信号150频谱-500-400-300-200-1000100200300400500观察带通信号100频谱-500-400-300-200-1000100200300400500观察低通信号100频谱代码:a=[1,0,1,1,0,1];subplot(3,1,1);stem(a);title('随机信号');for i=1:length(a)t=i-1:0.001:i;if (a(i)==1)s=sin(2*pi*t);endif (a(i)==0)s=0;endhold on;subplot(3,1,2);plot(t,s);title('2ASK调制后的信号') endfor i=1:length(a)t=i-1:0.001:i;if (a(i)==1)s=sin(2*pi*t);endif (a(i)==0)s=sin(4*pi*t);endhold on;subplot(3,1,3);plot(t,s);title('2FSK调制后的信号') end仿真图:5.PSK代码:clear all;close all;fs=8e5;%抽样频率fm=20e3;%基带频率n=2*(6*fs/fm);final=(1/fs)*(n-1);fc=2e5; % 载波频率t=0:1/fs:(final);Fn=fs/2;%耐奎斯特频率%用正弦波产生方波%==========================================twopi_fc_t=2*pi*fm*t;A=1;phi=0;x = A * cos(twopi_fc_t + phi);% 方波am=1;x(x>0)=am;x(x<0)=-1;figure(1)subplot(321);plot(t,x);axis([0 2e-4 -2 2]);title('基带信号');grid oncar=sin(2*pi*fc*t);%载波ask=x.*car;%载波调制subplot(322);plot(t,ask);axis([0 200e-6 -2 2]);title('PSK信号');grid on;%===================================================== vn=0.1;noise=vn*(randn(size(t)));%产生噪音plot(t,noise);grid on;title('噪音信号');axis([0 .2e-3 -1 1]);askn=(ask+noise);%调制后加噪subplot(324);plot(t,askn);axis([0 200e-6 -2 2]);title('加噪后信号');grid on;%带通滤波%==================================================================== ==fBW=40e3;f=[0:3e3:4e5];w=2*pi*f/fs;z=exp(w*j);BW=2*pi*fBW/fs;a=.8547;%BW=2(1-a)/sqrt(a)p=(j^2*a^2);gain=.135;Hz=gain*(z+1).*(z-1)./(z.^2-(p));subplot(325);plot(f,abs(Hz));title('带通滤波器');grid on;Hz(Hz==0)=10^(8);%avoid log(0)subplot(326);plot(f,20*log10(abs(Hz)));grid on;title('Receiver -3dB Filter Response');axis([1e5 3e5 -3 1]);%滤波器系数a=[1 0 0.7305];%[1 0 p]b=[0.135 0 -0.135];%gain*[1 0 -1]faskn=filter(b,a,askn);figure(2)subplot(321);axis([0 100e-6 -2 2]);title('通过带通滤波后输出');grid on;cm=faskn.*car;%解调subplot(322);plot(t,cm);axis([0 100e-6 -2 2]);grid on;title('通过相乘器后输出');%低通滤波器%================================================================== p=0.72;gain1=0.14;%gain=(1-p)/2Hz1=gain1*(z+1)./(z-(p));subplot(323);Hz1(Hz1==0)=10^(-8);%avoid log(0)plot(f,20*log10(abs(Hz1)));grid on;title('LPF -3dB response');axis([0 5e4 -3 1]);%滤波器系数a1=[1 -0.72];%(z-(p))b1=[0.14 0.14];%gain*[1 1]so=filter(b1,a1,cm);so=so*10;%add gainso=so-mean(so);%removes DC componentsubplot(324);plot(t,so);axis([0 8e-4 -3.5 3.5]);title('通过低通滤波器后输出');grid on;%Comparator%======================================================High=2.5;Low=-2.5;vt=0;%设立比较标准error=0;len1=length(so);for ii=1:len1if so(ii) >= vtVs(ii)=High;elseVs(ii)=Low;endendVo=Vs;subplot(325);plot (t,Vo), title('解调后输出信号'), axis([0 2e-4 -5 5])grid on;xlabel('时间 (s)'), ylabel('幅度(V)'), 仿真图:6.2DPSK差分相干解调原理图相干解调原理代码:clear allclose alli=10;j=5000;fc=4.6; %载波频率fm=i/5; %码元速率B=2*fm;t=linspace(0,5,j);a=round(rand(1,i));figure(4);stem(a);st1=t;for n=1:10if a(n)<1;for m=j/i*(n-1)+1:j/i*nst1(m)=0;endelsefor m=j/i*(n-1)+1:j/i*nst1(m)=1;endendendfigure(1);subplot(321);plot(t,st1);title('绝对码');axis([0,5,-1,2]);b=zeros(1,i); %全零矩阵b(1)=a(1);for n=2:10if a(n)>=1;if b(n-1)>=1b(n)=0;elseb(n)=1;endelseb(n)=b(n-1);endendst1=t;for n=1:10if b(n)<1;for m=j/i*(n-1)+1:j/i*nst1(m)=0;endelsefor m=j/i*(n-1)+1:j/i*nst1(m)=1;endendendsubplot(323);plot(t,st1);title('相对码st1');axis([0,5,-1,2]);st2=t;for k=1:j;if st1(k)>=1;st2(k)=0;elsest2(k)=1;endend;subplot(324);plot(t,st2);title('相对码反码st2');axis([0,5,-1,2]);s1=sin(2*pi*fc*t);subplot(325);plot(s1);title('载波信号s1');s2=sin(2*pi*fc*t+pi);subplot(326);plot(s2);title('载波信号s2');d1=st1.*s1;d2=st2.*s2;figure(2);subplot(411);plot(t,d1);title('st1*s1');subplot(412);plot(t,d2);title('st2*s2');e_dpsk=d1+d2;subplot(413);plot(t,e_dpsk);title('调制后波形');noise=rand(1,j);dpsk=e_dpsk+noise; %加入噪声subplot(414);plot(t,dpsk);title('加噪声后信号');dpsk=dpsk.*s1; %与载波s1相乘figure(3);subplot(411);plot(t,dpsk);title('与载波相乘后波形');[f,af]=T2F(t,dpsk); %通过低通滤波器[t,dpsk]=lpf(f,af,B);subplot(412);plot(t,dpsk);title('低通滤波后波形');st=zeros(1,i); %全零矩阵for m=0:i-1;if dpsk(1,m*500+250)<0;st(m+1)=0;for j=m*500+1:(m+1)*500;dpsk(1,j)=0;endelsefor j=m*500+1:(m+1)*500;st(m+1)=1;dpsk(1,j)=1;endendendsubplot(413);plot(t,dpsk);axis([0,5,-1,2]);title('抽样判决后波形')dt=zeros(1,i); %全零矩阵dt(1)=st(1);for n=2:10;if (st(n)-st(n-1))<=0&&(st(n)-st(n-1))>-1;dt(n)=0;elsedt(n)=1;endendst=t;for n=1:10if dt(n)<1;for m=j/i*(n-1)+1:j/i*nst(m)=0;endelsefor m=j/i*(n-1)+1:j/i*nst(m)=1;endendendsubplot(414);plot(t,st);axis([0,5,-1,2]);title('码反变换后波形');仿真图:。