FAD-DCM-SPI 电子罗盘模块规格书
瑞萨电子单芯片电表方案

78K0/Lx3-M的资源
按键扫描功能 异步串行通讯口UART6 异步串行通讯口UART0 专用的红外发射电路 LCD 驱动电路 低电压检测LVI 10位A/D转换器 外部中断输入 按键输入 RTC和温度校正 温度检测硬件 电能计量模块的功能 子芯片通讯模块
3
© 2010 Renesas Electronics Corporation. All rights reserved.
78K0/Lx3-M结构框图
主芯
K0
RAM RAM Cluster Cluster FLASH FLASH Cluster Cluster
RAMIF
外围器件
10位AD 温度传感器 TM0 x1通道
子芯 子芯
NEW NEW NEW NEW NEW NEW
24位 ⊿ΣADC
FCB 60K 60K
CIB
--电压信号过零点检测和过零点超时 --峰值检测 --失压检测 --周期和频率测量 --防窃电功能
4
© 2010 Renesas Electronics Corporation. All rights reserved.
方案特点
最大的特点:单芯片
MCU LCD驱动
传统方案
电能计量 MCU RTC
温度传感器
MINICUBE2
异步串口UART0
RS485模块
7
© 2010 Reon. All rights reserved.
ASSP电能表实物图
演示板
通信电缆
8
© 2010 Renesas Electronics Corporation. All rights reserved.
电能计量
1K 1K 1K 1K
电子罗盘模块使用手册 CMPS04-I2C.

CMPS04-I2C 电子罗盘模块
电子罗盘模块使用手册 CMPS04-I2C
/
概述:CMPS04-I2C 是一款高性能平面数字罗盘模块,其工作原理是通过磁阻传感器感应地球磁场的磁分 量,从而得出方位角度。该罗盘以 I2C 方式与上位进行通信。CMPS04 模块相当于一个 AT24C02 的存储器
校准的方法:
当罗盘周围磁场改变后,罗盘计算输出的角度信息将不准确,这时要对罗盘进行校准,以此对罗盘周 围磁场改变所产生的影响进行校正。方法:将罗盘水平放置发送 0x51 到命令寄存器之后均匀缓慢的旋转两 周,不可以太快,旋转一周时间应该不小于 1 分钟,一般 1 分钟旋转一周,(可以绕自身的中轴旋转,也可 以绕平面内一点作圆周运动),然后发送 0x52 到命令寄存器结束校准。
(2)电子罗盘的干扰信号 电子罗盘在稳定的磁环境下补偿适中的偏差,但是它不能补偿改变的磁干扰。比如,带直流电的电线产 生磁场,如果直流电改变,磁场大小也将改变。电源也一个变化的干扰源。 电子罗盘是消除不了变化的磁 环境干扰。
(3)电子罗盘的测量精度 国外号称是世界上精度最高的电子罗盘(C100),价格是大概 795 美元,它的航向精度能达到 0.5 度
改变目前 0xE0 设备地址( 默认出厂地址)到 0xE8,请按正确的顺序写入命令字符( 0xA0,0xAA,0xA5,0xE8 )。
这些命令必须发送正确的顺序才改变 I2C 地址,写入这个命令之间不能有其它的操作命令字符。 该命令字
符序列必须发送到命令寄存器的位置。操作完成后,你应该标签 IIC 地址,如果你忘了修改后的 IIC 地址,
你可以看发光二极管的闪烁状态。IIC 地址会在 LED 输出显示。 LED 长闪烁后就是一个 IIC 地址指示,较
HMR3500数字磁罗盘套件 用户手册说明书
HMR3500数字磁罗盘套件用户手册目录1. 前言 (3)1.1 版本 (4)2. 操作原理 (4)2.1 电子硬件 (5)2.2 信号处理 (5)3. 安装 (6)3.1 罗盘安装 (6)3.2 电源 (7)3.3 线路连接 (8)4. 测试考虑因素 (9)4.1 主机 (9)4.2 磁补偿 (9)4.3 发光二极管显示器 (10)4.4 串行数据接口 (10)5. 测试软件 (11)5.1 测试软件安装 (11)5.2 演示概要 (11)5.3 启动 (12)5.4 请求和指令 (13)5.3.1 文件菜单 (13)5.4.1 视图菜单 (14)5.4.3 罗盘菜单 (16)5.4.4 罗盘自差补偿 (19)5.5.5 帮助 (21)5.5 数据记录 (21)5.5.1 文件描述 (21)6. 软件消息接口 (23)6.1 信息包(包)格式 (23)6.2 数字数据格式 (24)6.3 协议 (24)6.4 消息描述 (25)6.4.1 软件复位 (27)6.4.2 打开电源 (27)6.4.3 设置波特率值 (28)6.4.4 自检测 (29)6.4.5 状态 (30)6.4.6 刻度初始化 (30)6.4.7 设置电源上升的默认值 (31)6.4.8 磁偏差初始化 (33)6.4.9 地磁场模型-WMM (34)6.4.10 版本 (35)6.4.11 罗盘定向 (36)6.4.12 罗盘磁力补偿 (37)6.4.13 DORIENT消息传输率 (39)7. 术语和缩写词 (40)8. 参考文献 (41)插图目录图1:HMR3500数字磁罗盘电子元件 (3)图2:HMR3500数字磁罗盘模块示意图 (4)图3:工程评估套件硬件 (6)图4:安装尺寸 (7)图5:CompassHost程序主窗口显示器 (12)图6:状态浏览窗口 (15)图7:导航控制窗口 (15)图8:对话框初始化 (16)图9:磁偏差对话框 (18)图10:罗盘磁补偿过程 (20)表格目录表1:接口引出针脚的定义 (8)表2:数字数据格式 (24)表3:消息列表 (26)1.前言非常感谢阁下从Honeywell购买HMR3500数字磁罗盘工程评估成套件。
CR6853规格书

4%
VDD=16V, IO=20mA VDD=16V, IO=20mA CL=500pF CL=500pF CL=1000pF CL=1000pF CL=1500pF CL=1500pF CL=2000pF CL=2000pF VDD=20V
0.8 V
10
V
123
ns
71
ns
ns
ns
ns
ns
ns
ns
CR6853 Green-Power Function
V2.1
6/12
CR6853
具有低 EMI 技术的低成本绿色节能 PWM 控制器
同步斜坡补偿
虽然电流模式控制比起普通的电压模式
控制具有很多优点,但是,同时存在着峰值感
应电流模式转换器的缺点。特别是当PWM占 空比大于50 %,整个控制环路可能变得不稳定,
14V/8.8V。启动时,VDD电容器必须通过启
动电阻充电高于14V,关闭时,VDD电容上的
电压必须低于8.8V。这5.2V的迟滞电压有效
地保证了芯片能够正常启动。
内部偏置电流和工作频率
RI引脚和GND引脚之间的电阻决定了内
部偏置电流的大小,而内部振荡器利用该电流
对固定电容充放电产生振荡信号。所以增加电
阻可以减小偏置电流,同时降低开关频率。 RI
和PWM开关频率的关系如下:
FOSC
=
6700 (kHz) RI (KΩ)
例如 , 一 个 100kΩ 的 电阻 可 以 产生一 个
20uA 的偏置电流和一个65K的PWM开关频
率;CR6853的建议工作频率范围是50KHz到
150KHz之间。
绿色节能
对一个小功率反激电源而言,主要的损耗 包括传导损耗、开关损耗和控制芯片的损耗, 而这些损耗都和开关频率有关。所以在轻负载 或则无负载时,通过降低PWM工作频率,可 以有效的减小反激电源的待机功耗。为了实现 符合标准的待机功耗,CR6853采用了PWM, PFM 和CRM相结合的控制方法:在中等负载 或重载时,CR6853工作在PWM方式,频率 为65kHz(RI外接100K电阻时) ;通过修改脉 冲宽度,CR6853可以控制输出电压。当负载 逐渐减小时,FB端反馈电流增加。当反馈电 流超过0.5mA时,内部模式控制器进入PFM 和PWM。振荡器的工作频率逐渐降低,当反 馈电流超过0.55mA时,振荡器的工作频率保 持不变,最后稳定在22kHz附近。为了进一步 降低待机功耗,CR6853引入一种周期复位技 术,当FB端的反馈电流大于0.59mA时,内部 逻辑电路在PWM的下降沿对寄存器复位,在 PWM上升沿通过检测输出电压值对寄存器置 位。因此内部振荡器频率保持不变,逻辑电路 将会复位一些脉冲以至于在输出GATE的实 际频率降低。
盛瑟传感电子罗盘磁场传感器模块SM07-DC说明书
电子罗盘磁场传感器模块(型号:SM07-DC)使用说明书版本号:1.1实施日期:2021.9.22电话:邮箱:网址:https://声明本说明书版权属成都盛瑟传感技术有限公司(以下称本公司)所有,未经书面许可,本说明书任何部分不得复制、翻译、存储于数据库或检索系统内,也不可以电子、翻拍、录音等任何手段进行传播。
感谢您使用盛瑟传感的系列产品。
为使您更好地使用本公司产品,减少因使用不当造成的产品故障,使用前请务必仔细阅读本说明书并按照所建议的使用方法进行使用。
如果您不依照本说明书使用或擅自去除、拆解、更换传感器内部组件,本公司不承担由此造成的任何损失。
您所购买产品的颜色、款式及尺寸以实物为准。
本公司秉承科技进步的理念,不断致力于产品改进和技术创新。
因此,本公司保留任何产品改进而不预先通知的权力。
使用本说明书时,请确认其属于有效版本。
同时,本公司鼓励使用者根据其使用情况,探讨本产品更优化的使用方法。
请妥善保管本说明书,以便在您日后需要时能及时查阅并获得帮助。
成都盛瑟传感技术有限公司电话:************邮箱:****************网址:https://电话:************邮箱:****************网址:https://一、产品描述模块内部自带电压稳定电路,工作电压3.3V-5V,引脚电平兼容3.3V/5V的嵌入式系统,连接方便。
支持串口、IIC两种数字接口,IIC是直接连接芯片,方便用户选择最佳的开发连接方式。
串口可输出由磁场解析的航向角度,最高100Hz数据输出速率。
输出速率0.1~100Hz可调节。
2层PCB板工艺,更薄、更小、更可靠。
输出两种模式:串口模式、IIC模式。
电话:************邮箱:****************网址:https://二、性能参数产品型号SM07-DC 传感器类型半导体系列供电电压DC 3.3V~5V/建议+5V供电工作电流小于6毫安模块体积15.24mm *15.24mm *7.8mm 焊盘间距上下100mil(2.54mm)左右600mil(15.24mm)测量内容三轴的磁场和角度通信方式IIC通信和串口通信通信速率9600回传速率0.1-100HZ可调节灵敏度3000LSB/Gauss 量程-8Gauss ~+8Gauss三、引脚说明四、硬件连接电子罗盘磁场传感器模块与计算机连接通信,需要USB转TTL电平的串口模块。
SEC295M 九轴全姿态电子罗盘 技术手册说明书

SEC295M 系列九轴全姿态电子罗盘技术手册●卫星追踪●石油地质勘井●光测距仪●GPS 辅助导航主要特性应用领域无人驾驶运载车辆在执行复杂的任务时往往需要精确的航向信息,但是目前的航姿参考系统在遇到磁干扰时往往很容易迷失方向,不规则运动过程也容易导致误差,甚至在静态环境中也不准确。
SEC295M 九轴姿态航向参考系统是北微传感专门为存在磁干扰和动态运动环境提供高精度横滚、俯仰和方位测量的惯性产品。
该产品包涵9自由度传感器:3轴加速度传感器,3轴磁传感器和3轴陀螺仪。
通过优化的扩展卡尔曼滤波算法,产品实时输出高精度姿态信息。
SEC295M 专门为提高磁罗盘的抗干扰能力而设计,当铁性干扰物靠近产品时,SEC295M 依然可以保持高精度方位信息。
SEC295M 同时也具有优异的动态性能,保证了动态测量的高精度。
高性价比让SEC295M 非常适合高航向精度要求场合。
●手持设备●海洋勘测●水下导航●机械控制产品介绍●三轴陀螺三轴加速度计三轴磁力计●动态静态测量●偏置追踪算法消除漂移●高精度,低成本●宽温范围:-40℃~+85℃●小体积外形:L55×W37×H24(mm)●带硬磁、软磁及倾角补偿●航向精度2°电源电压5-12V DC工作电流30mA(40mA最大)工作温度-40℃~85℃存储温度-55℃~100℃罗盘航向参数航向精度2°(RMS,静态,罗盘工作模式)3°(RMS,动态,航姿工作模式)重复性0.1°罗盘倾斜参数俯仰精度2°(RMS,动态)0.5°(RMS,静态)横滚精度2°(RMS,动态)0.5°(RMS,静态)分辨力0.01°倾斜范围俯仰±90°;横滚±180°校准硬磁校准有软磁校准有物理特性尺寸L55x W37x H24(mm)重量80g输出形式RS232/485/TTL 接口接口特性启动延迟<3s 最大输出频率100次/sRS232通信速率2400到115200波特率环境抗振性能3000g分辨力:传感器在测量范围内能够检测和分辨出的被测量的最小变化值。
电子罗盘应用电路设计与调试
内置自检功能 低电压工作(2.16-3.6V)和超低功耗(100uA) 内置驱动电路 I2C数字接口 无引线封装结构 磁场范围广(+/-8Oe) 有相应软件及算法支持 最大输出频率可达160Hz
SCL VDD NC S1
3 设计过程
HMC5883L简介
霍尼韦尔 HMC5883L 是一种表面贴装的高集成模块,并带有数字接口的弱磁传感器芯 片,应用于低成本罗盘和磁场检测领域。HMC5883L 包括最先进的高分辨率HMC118X系 列磁阻传感器,并附带霍尼韦尔专利的集成电路包括放大器、自动消磁驱动器、偏差校 准、能使罗盘精度控制在1°~2°的12位模数转换器。
(2)电路调试 1. 使用+5V电源接入HMC5883L电子罗盘模块的J4接口,使用20P排线将 HMC5883L电子罗盘模块J2接口和智能显示终端的J2接口相连接起来,确认 无误之后,给模块上电,模块电路如图13.2所示。 2. 通过按键K1或K2选中电子罗盘实验,点击按键K5进入电子罗盘实验,可 以观察到智能显示终端上显示当前方向角。 3. 缓慢转动模块,观察智能显示终端上方向角的变化。
1. 任务描述 2. 器材准备 3. 设计过程 4. 电路调试
课程内容 Course Contents
1. 任务描述 2. 器材准备 3. 设计过程 4. 电路调试
1 任务描述任务描述 Nhomakorabea• 具体任务 1)掌握HMC5883L磁传感器结构及工作原理。 2)掌握电子罗盘应用电路的制作与调试方法。
• 任务要求 用HMC5883L测量当前方位角,并在智能显示终端上显示出来。
HMC5883L 采用霍尼韦尔各向异性磁阻(AMR)技术,这些各向异性传感器具有在轴向 高灵敏度和线性高精度的特点。传感器带有的对于正交轴低敏感度的固相结构能用于测 量地球磁场的方向和大小,其测量范围从毫高斯到 8 高斯(gauss)。
DCMP-005技术说明书
DCMP-005直流馈电控制保护装置V1.0技术说明书上海地铁运营有限公司上海申贝科技发展有限公司目录第 1 章总体概述 (1)1.1系统简介 (1)1.2产品功能 (1)1.2.1 保护控制功能 (1)1.2.2 数据存储功能 (1)1.2.3 人机交互功能 (2)1.3主要特点 (2)1.4引用指标 (2)1.5整机指标 (2)1.5.1 电气参数 (2)1.5.2 环境参数 (2)1.5.3 电磁兼容 (3)1.5.4 结构尺寸 (3)1.5.5 性能指标 (3)第 2 章系统性能 (4)2.1基本结构 (4)2.2保护功能 (5)2.2.1 三段过电流保护 (6)2.2.2 过电流瞬时保护(IOP) (7)2.2.3 过电流延时保护(OCP) (8)2.2.4 热反时限保护(TIP) (9)2.2.5 近区短路保护(ROR_INS) (11)2.2.6 远区短路保护(ROR_DEL) (13)2.2.7 保护组选择 (14)2.3脱扣逻辑 (14)2.4线路测试 (15)2.4.1 测试原理 (15)2.4.2 线路测试顺序 (16)2.4.3 线路测试控制 (16)2.4.4 线路测试参数设置 (17)2.5波形记录 (18)2.6密码保护 (18)2.7面板指示灯 (18)第 3 章装置结构 (19)3.1装置轮廓图 (19)3.2装置实物图 (20)3.3装配尺寸 (21)3.4出口接线 (22)3.4.1 -X1端子接线示意图 (22)3.4.2 -X8与-X9端子接线示意图 (23)3.4.3 现场总线通讯接口示意图 (24)第 4 章技术数据 (25)4.1界面与接口 (25)4.1.1 操作面板 (25)4.1.2 -X10 PC接口技术数据 (25)4.1.3 -X1端子接口技术数据 (25)4.1.4 –X2通讯接口技术数据 (25)4.1.5 –X3通讯接口技术数据 (25)4.1.6 –X4 CAN总线接口技术数据 (26)4.1.7 –X5、-X6光纤通讯发收接口技术数据 (26)4.1.8 –X7以太网通讯接口技术数据 (26)4.1.9 –X8接线端子接口技术数据 (26)4.1.10 –X9接线端子接口技术数据 (26)第 5 章面板操作 (27)5.1键盘介绍 (27)5.1.1 主键盘按键介绍 (27)5.1.2 软键盘介绍 (27)5.1.3 数值输入举例 (27)5.1.4 液晶复位 (27)5.2主页面介绍 (28)5.3菜单介绍 (28)5.3.1 参数设置菜单 (28)5.3.2 数据与记录菜单 (33)5.3.3 命令菜单 (38)5.4菜单键盘操作 (38)附A:设置参数表 (39)附B:面板指示灯定义 (42)附C:-X1端子排定义 (44)附D:-X8端子排定义 (47)附E:-X9端子排定义 (51)第 1 章总体概述1.1系统简介随着我国国民经济的持续发展,城市交通日趋紧张。
电子罗盘
功能 方位标定
方位置零 输出方式 设置地址号
含义 开始平面标定 停止平面标定 保存标定数据 设置零点方位 清除磁北修正
磁北修正 连续输出 单次输出
写地址
命令字 0xF5 0xF8 0xF7 0xA5 0xE5 0xE8 0xA0 0xA1 0xFF
数据帧 AA AA 04 01 F5 F0 AA AA 04 01 F8 FD AA AA 04 01 F7 F2 AA AA 04 01 A5 A0 AA AA 04 01 E5 E0 AA AA 04 01 E8 ED AA AA 04 01 A0 A5 AA AA 04 01 A1 A4 AA AA 04 01 FF 02 F8
±0.7 ±1 %
±1.5 ±2 %
±0.4
º
稳定性
测量温度 25℃,时间间隔 24 小时
±0.6
º
热零点漂移 温度范围:-40℃—80℃
*1
最大干扰磁场
±0.04 ±0.06 º/℃ 20 Gauss
数据更新率
输出方式为连续输出,LP3200 输出方式为连续输出,LP3201
3
Hz
4.9
Hz
波特率
11 罗盘与磁北偏角低位
12
校验
无符号数
前 11 字节的异或
HEX 格式数据解析举例:
例如:接收到数据帧 AA AA 0A 01 A0 00 F0 FF 80 04 9D BD;
AA AA 为数据帧帧头; 0A 为数据帧长度,不包括帧头,即 10; 01 为倾角的地址号; A0 为单次输出的命令字;
mm
直径:35 高:16
mm
*1:在该磁场环境下工作不会损坏内部的磁场检测传感器,对于正常工作范围小于±2 高 斯的产品,在 20 高斯磁场环境下不能正常反应磁场变化,如果必须要在这种条件下使用罗 盘,需要和工厂说明对产品进行特别处理。
AK8963规格书
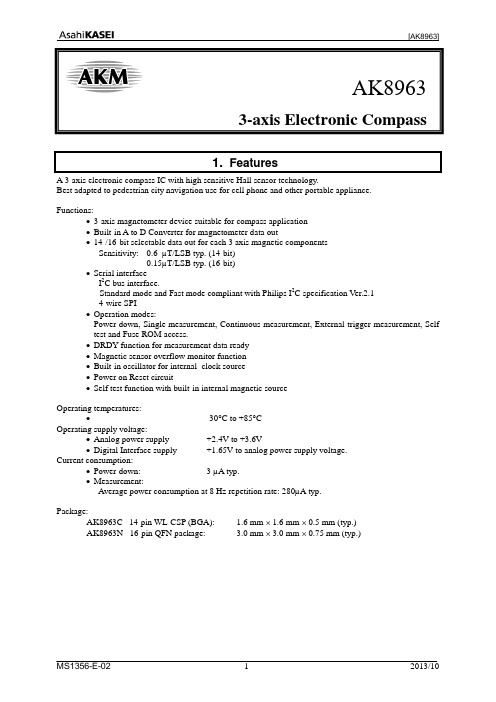
AK8963
3-axis Electronic Compass
1. Features
A 3-axis electronic compass IC with high sensitive Hall sensor technology. Best adapted to pedestrian city navigation use for cell phone and other portable appliance. Functions: • 3-axis magnetometer device suitable for compass application • Built-in A to D Converter for magnetometer data out • 14-/16-bit selectable data out for each 3 axis magnetic components - Sensitivity: 0.6 µT/LSB typ. (14-bit) 0.15µT/LSB typ. (16-bit) • Serial interface - I2C bus interface. Standard mode and Fast mode compliant with Philips I2C specification Ver.2.1 - 4-wire SPI • Operation modes: Power-down, Single measurement, Continuous measurement, External trigger measurement, Self test and Fuse ROM access. • DRDY function for measurement data ready • Magnetic sensor overflow monitor function • Built-in oscillator for internal clock source • Power on Reset circuit • Self test function with built-in internal magnetic source Operating temperatures: • -30°C to +85°C Operating supply voltage: • Analog power supply +2.4V to +3.6V • Digital Interface supply +1.65V to analog power supply voltage. Current consumption: • Power-down: 3 µA typ. • Measurement: - Average power consumption at 8 Hz repetition rate: 280µA typ. Package: AK8963C 14-pin WL-CSP (BGA): AK8963N 16-pin QFN package: 1.6 mm × 1.6 mm × 0.5 mm (typ.) 3.0 mm × 3.0 mm × 0.75 mm (typ.)
DCM使用详解

DCM使用详解本文翻译自Using Digital Clock Managers (DCMs) in Spartan-3 FPGAsDCM主要功能1. 分频倍频:D CM可以将输入时钟进行multiply或者di v ide,从而得到新的输出时钟。
2. 去skew:DCM还可以消除clock的skew,所谓skew就是由于传输引起的同一时钟到达不同地点的延迟差。
3. 相移:DCM还可以实现对输入时钟的相移输出,这个相移一般是时钟周期的一个分数。
4. 全局时钟:D CM和FPG A内部的全局时钟分配网络紧密结合,因此性能优异。
5. 电平转换:通过D CM,可以输出不同电平标准的时钟。
DCM的特点与能力(Spartan-3系列为例)∙数量:4 DCM / FPGA(也有例外)-- 应该够用了∙数字频率综合器输入(CLKIN):1-280MHz∙延迟锁相环输入(CLKIN):18-280MHz∙时钟输入源(CLKIN):Global buffer input padGlobal buffer outputGeneral-purpose I/O (no deskew)Internal logic (no deskew)-- 上面最后两个分别是外部的普通IO口和内部的逻辑,没有deskew,所以时钟质量不会很好。
∙频率综合器输出(CLKFX、CLKFX180):是CLKIN的M/D倍,其中M=2..32D=1..32-- 这样看来最大能倍频32倍,最小能16分频。
∙时钟dividor输出(CLKDV):是CLKIN的下列分频1.5, 2,2.5, 3,3.5, 4,4.5, 5,5.5, 6,6.5, 7,7.5, 8, 9, 10, 11, 12, 13, 14, 15, or 16-- 发现没有,最大的分频也是16。
不过能支持半分频,比用频率综合器方便。
∙倍频输出(CLK2X、CLK2X180):CLKIN的2倍频∙时钟conditioning、占空比调整:这个对所有时钟输出都施加,占空比为50%。
SPA电子罗盘用户手册(PDF)
SPA2电子罗盘 用户手册目 录1 概述 (1)2 坐标系定义 (1)3 性能指标 (2)4 引脚定义 (3)5 通信协议 (3)6 测试软件 (4)7 数据格式 (5)8 自动校准 (5)9 出厂默认值 (6)1 概述SPA2电子罗盘是一种高精度数字式电子罗盘。
它主要由全固态三轴磁强计、MEMS 二轴加速度计、温度传感器、低通滤波器和16位MSP430系列微功耗单片机等硬件构成,结合独有的软件算法,可以为用户提供三维姿态信息、三轴磁场强度和环境温度,并可不依赖PC 而由罗盘自主对软硬磁干扰进行补偿。
它具有精度高、频响快、重复性好、功耗低、体积小等优点,可以广泛应用于航空、航天、航海、水中兵器、石油钻井、汽车等需要定向和导航的领域。
2 坐标系定义坐标系定义如下图所示:磁场测量和加速度测量均以向下为正。
X 图1 电子罗盘坐标系Z (朝下)OY (朝前)(朝右)3性能指标磁场测量范围为±360 uT,分辨力20nT重力场测量范围为±1.5g,噪声密度小于120μg/√Hz航向角测量范围:0°~360°精度:倾斜角≤1°,±0.3°;倾斜角≤30°,±0.5°;自动校准精度:±0.8°分辨力:0.1°重复性:±0.1°俯仰角测量范围:±60°精度:倾斜角≤30°,±0.2°;倾斜角≥30°,±0.5°分辨力:0.1°重复性:±0.1°横滚角测量范围:±60°精度:倾斜角≤30°,±0.2°;倾斜角≥30°,±0.5°分辨力:0.1°重复性:±0.1°电气接口:TTL、RS232(default)、RS422数据方式:广播模式(分为二进制补码、ASCⅡ码两种)和应答模式 波特率:9600bps(default)~115200bps采样率:5Hz~100Hz数据更新率:1Hz~80Hz工作电压:DC3.3V~DC15V消耗电流:10mA(休眠模式下5mA)工作储存温度:-40℃~85℃4 引脚定义SPA2电子罗盘采用标准9芯串口,其引脚定义如下:表1 电子罗盘引脚定义引脚名称功能1 Y RS422驱动器同相输出端2 TXD/ZRS232电平发送/ RS422驱动器反相输出端 3 RXD/BRS232电平接收/RS422接收器反相输入端 4 A RS422接收器同相输入端 5 GND 电源地 6 txd TTL 电平发送 7 rxd TTL 电平接收 8 NC 工厂保留,悬空 9 Vcc 电源电压5 通信协议0x88:广播模式下握手信号/正确标识符; 0x44:错误标识符;0xda:应答模式下握手信号。
电子罗盘模块
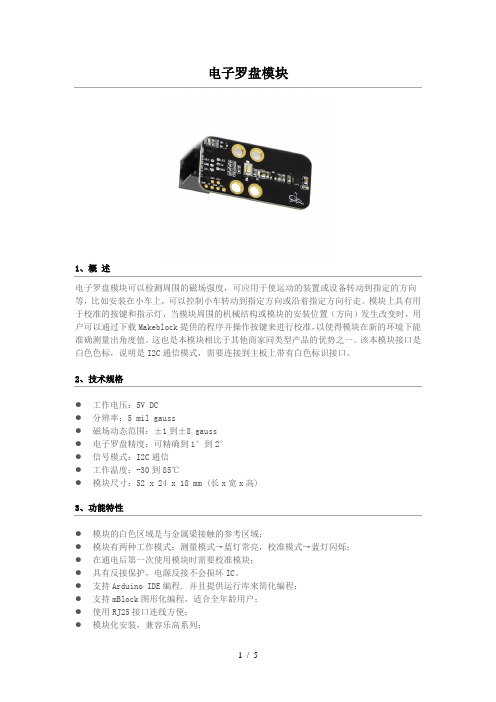
电子罗盘模块1、概述电子罗盘模块可以检测周围的磁场强度,可应用于使运动的装置或设备转动到指定的方向等,比如安装在小车上,可以控制小车转动到指定方向或沿着指定方向行走。
模块上具有用于校准的按键和指示灯,当模块周围的机械结构或模块的安装位置(方向)发生改变时,用户可以通过下载Makeblock提供的程序并操作按键来进行校准,以使得模块在新的环境下能准确测量出角度值。
这也是本模块相比于其他商家同类型产品的优势之一。
该本模块接口是白色色标,说明是I2C通信模式,需要连接到主板上带有白色标识接口。
2、技术规格●工作电压:5V DC●分辨率:5 mil gauss●磁场动态范围:±1到±8 gauss●电子罗盘精度:可精确到1°到2°●信号模式:I2C通信●工作温度:-30到85℃●模块尺寸:52 x 24 x 18 mm (长x宽x高)3、功能特性●模块的白色区域是与金属梁接触的参考区域;●模块有两种工作模式:测量模式→蓝灯常亮,校准模式→蓝灯闪烁;●在通电后第一次使用模块时需要校准模块;●具有反接保护,电源反接不会损坏IC。
●支持Arduino IDE编程, 并且提供运行库来简化编程;●支持mBlock图形化编程,适合全年龄用户;●使用RJ25接口连线方便;●模块化安装,兼容乐高系列;●配有接头支持绝大多数Arduino系列主控板。
4、引脚定义电子罗盘模块有六个针脚的接头,每个针脚的功能如下表序号引脚功能1 GND 地线2 VCC 电源线3 SDA I2C数据接口4 SCL I2C时钟接口5 RDY 检测数据是否已采集6 KEY 检测校准按钮是否按下表 1 6-Pin 接口功能5、接线方式●RJ25连接由于电子罗盘模块接口是白色色标,当使用RJ25接口时,需要连接到主控板上带有白色色标的接口。
以Makeblock Orion为例,可以连接到3,4,6,7,8 号接口,如图图 1 电子罗盘模块与 Makeblock Orion连接●杜邦线连接当使用杜邦线连接到Arduino Uno主板时,模块SCL、SDA引脚需要连接到 I2C接口,即连接到A5、A4接口如下图所示:图 2 电子罗盘模块与 Arduino UNO 连接图注:接杜邦线时,模块上需要焊接排针。
dcm模块封装尺寸

dcm模块封装尺寸全文共四篇示例,供读者参考第一篇示例:DCM模块的封装尺寸是设计电路板时非常重要的考虑因素之一。
DCM模块通常包括直流至直流(DC-DC)转换器、电源管理模块和其他功能模块,其封装尺寸直接决定了整个电路板的尺寸和功耗。
本文将介绍DCM模块封装尺寸的相关知识,讨论尺寸的选择对电路板设计的影响,以及一些常见的尺寸标准和规范。
1. DCM模块封装尺寸的选择原则DCM模块的封装尺寸应该根据具体的电路板设计要求和功能需要进行选择。
一般来说,尺寸越小,功耗越低,但同时性能和散热能力也会受到影响。
在选择封装尺寸时,需综合考虑以下几个方面:(1)功耗需求:根据目标应用场景和功耗需求确定封装尺寸。
如果功耗较大,通常需要较大的尺寸来提供足够的散热能力。
(2)性能指标:尺寸会影响DCM模块的性能指标,如效率、稳定性和可靠性等。
尺寸越小,一般效率会有所下降,因此需对性能指标进行平衡考虑。
(3)散热设计:尺寸与散热设计密切相关。
较小的尺寸可能导致散热不足,影响模块的稳定性和寿命,因此要确保封装尺寸能够满足散热要求。
DCM模块封装尺寸对电路板设计有着直接的影响,以下是一些主要方面的影响:(1)PCB布局:封装尺寸会直接影响PCB的布局,较大的尺寸会占用更多的空间,导致布局受限;较小的尺寸能够节约空间,但对布局的要求也更高。
(3)集成度:封装尺寸也会影响DCM模块的集成度,较小的尺寸能够更方便地集成到整个系统中,提高系统的整体性能。
3. 常见的封装尺寸标准和规范在电子行业中,有一些常见的封装尺寸标准和规范,用于规定不同类型的模块和器件的尺寸,以便于设计和生产。
以下是一些常见的封装尺寸标准:(1)SMT标准封装:常见的SMT标准封装有0805、1206、0603等,用于表面贴装元件的设计,尺寸各有不同,适用于不同的应用场景。
(2)BGA封装:BGA封装是一种较小的封装形式,通常用于高密度集成电路和射频模块,具有较高的集成度和性能要求。
HoneywellHMR3000三轴数字罗盘规格书
HoneywellHMR3000三轴数字罗盘规格书电⼦罗盘模块按照NMEA格式,通过RS232/485串⼝提供航向输出(横滚、俯仰、偏航)采⽤Honeywell公司的固态磁阻传感器,具有快速的响应时间⾄20Hz,航向精度为0.5? ,分辨率为0.1? 。
快速响应时间⼩体积低功耗⾼精度宽的倾斜⾓度对铁磁物性⾦属进⾏补偿使⽤固态磁传感器提⾼了响应速度,和万向架固定式的磁通门传感器相⽐提⾼了数据更新速度。
仅为⼀块线路板,重量⼩于57克,体积为83x25x22mm,铝外壳封装。
功耗⼩于25mA,可长时间电池供电0.5? 航向精度,分辨率0.1? ,可适⽤于严格定向的应⽤场合。
倾斜⾓度为±40? ,适合于⼴泛的要求精确的应⽤通过对因环境中存在铁磁性⾦属⽽对地磁场造成的扭曲的补偿,提⾼精度。
h t t p://w ww.y or k i n st r u me n t.ce l l-HM R.h t m下表显⽰,9针插头引脚排列,电源可以为调制的5V ,或不调制6—15V ,只有#9针或#8针中的⼀个,可由给定连接⽅法连接。
见以下:接⼝信号描述通信HMR3000 ⽤简单的ASCII 字符与外部主控制器,通过 RS-232 或 RS-485 通讯。
ASCll 码的发送和接收,使⽤1个起始位,8个数据位(先是LSB,MSB 总为0) ,⽆奇偶位,和⼀个停⽌位,波特率可设置为1200,2400,4800,9600,19200或38400,HMR3000 对所有收到的带校验码的有效输⼊作反应。
罗盘输出HMR3000输出三种NMEA 标准格式(HDG,HDT 和XDR),三种专⽤格式(HPR,RCD 和CCD),及⼀个 ASCll 码航向输出,⽤于数据显⽰。
HDG,HDT 和HPR 是最通⽤格式。
$HCHDG 航向、偏差⾓、磁偏⾓$HCHDG, 85.5, 0.0, E, 0.0, E*77$HCHDT,航向、对(True)$HCHDT,271.1,T*2C$PTNTHPR,航向、俯仰和横滚$PTNTHPR,Heading,Heading Status,Pitch,Pitch Status,Roll,Roll Status*hh$PTNTHPR,85.9,N,-0.9,N,0.8,N*2C名称TxD/B RxD/A GND 6-15V 5VOper/Calib(2)Run/Stop(2)Ready/Sleep(2)Cont/Reset(2)⼊/出Out In In In In In InIn In引脚235981647描述RS-232 发送/ RS-485RS-232 接收 / RS-485电源/信号地未调理的电源电压输⼊调理的电源电压输⼊Operate/Calibrate (3) input (open=Operate)Run/Stop (3) input (open=Run)Ready/Sleep (3) input(open=Ready)Continue/Reset (3) input (open=Continue)(典型值)---6-155 ± 5%0-50-50-50-5(最⼩值)(1)-18-1800-20-20-20-20单位Vdc VdcVdc Vdc Vdc Vdc Vdc Vdc(最⼤值)(1)1818307.520202014(1) 绝对最⼤值(2) 沉电流:200µA (典型值), 400mA(最⼤值)(3) 开路输⼊ =⾼电平h tt p://w w w.y ork i n s t ru m e nt .c o m/H on e y w e l l -H M R.h t mHMR3000 连线图——计算机RS232 到 HMR3000订货指南HMR3000-Demo-232*.....RS232HMR3000-D00-232..........RS232.........NoneHMR3000-D21-232..........RS232.........Extended Base HMR3000-D00-485..........RS485.........None HMR3000-D21-485..........RS485.........Extended Base*Development Kit includes one module in alu minum enclosure, cablingwith power supply, demonstration software for PC running Windows ?and User ’s Manual.ht t p://w ww .y o rk i n s t ru m en t .c o m /Ho n e yw e l l -H M R.h t m数值<0.5?<1.5?± 0.3?0.1?degrees/mils ±40?±0.4?±0.6?±0.2?0.1?degree/mils ±1.0 Gauss (最⼤值)1 mGauss 5.0 Vdc 调理电压6~15Vdc 未调理电压35 mA@6 Vdc13 mA 2.0 mARS-232RS-4851200 to 38400 bps NMEA 0183连续滤波0.75 oz (22g)3.25 oz (92g)1.2 x 2.95 x 0.7601.5 x 4.2 x 0.88-20 to 70?C -35 to 100?C 30 英⼨⾼落下20~2000Hz Random 2 hrs/axisIPC6012IPC610航向⾓俯仰和横滚磁场电⽓接⼝物理环境制造指标1. 航向精度是假设地球磁体只有硬铁⼲扰,已通过标定进⾏补偿2. 标定值3. 由设计参数保证4. 典型5. 迟到或超过*器件⽅向⾓不超过75?在⼯作或贮存时——可引起短暂的精度损失。
FAD-DCM-I9电子罗盘模块规格书
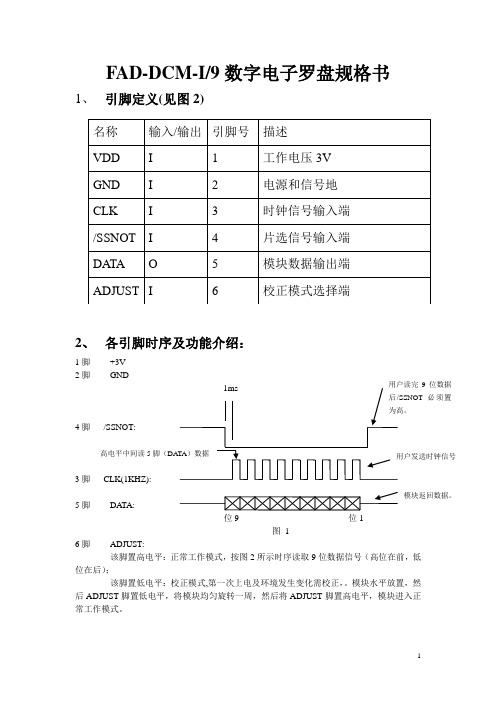
FAD-DCM-I/9数字电子罗盘规格书
1、 引脚定义(见图2)
2、 各引脚时序及功能介绍:
1脚
+3V 2脚 GND
4脚 /SSNOT:
高电平中间读5脚(
3脚 CLK(1KHZ):
5脚 DATA:
位9 位1 图 1
6脚 ADJUST:
该脚置高电平:正常工作模式,按图2所示时序读取9位数据信号(高位在前,低位在后);
该脚置低电平:校正模式,第一次上电及环境发生变化需校正,。
模块水平放置,然后ADJUST 脚置低电平,将模块均匀旋转一周,然后将ADJUST 脚置高电平,模块进入正常工作模式。
9位数据必须置 模块返回数据。
3、9位数据输出编码:
角度数据范围:十六进制(0X00~0X167),转换成十进制为(0~359);
4、应用电路:
图2。
HMR3000数字罗盘模块解读
HMR3000数字罗盘模块用户指南1、概述Honeywell的HMR3000数字罗盘模块使用磁阻传感器和两轴倾斜传感器来提供航向信息。
带有电子常平架的罗盘即使倾达40°,也能给出精确的航向。
HMR3000内部全部使用表面贴装元件,不含有任何的移动元件,所以非常可靠和坚固。
这个低功耗、小体积的装置带有非铁磁性金属外壳,便于安装固定在任何一个平台上。
HMR3000便于使用,极其多样化。
允许用户对罗盘的输出进行组态,包括六种NMEA标准信息的组合,改变磁场计的测量参数以适应不同应用的需要等。
完善的罗盘自动标定程序将修正平台的磁影响。
磁场计的宽动态范围(±1G或100μT)允许HMR3000工作在当地较大的磁场下。
2、开始了解HMR30002.1辨别产品HMR3000罗盘模块有三种不同的选型(1)带有RS232或RS485接口的电路板(2)带有RS232或RS485接口,带有外壳的罗盘模块(3)演示装置(只有RS232接口)在选型(1)中,接口形式清楚地标在线路板上,在选型(2)中,清楚地标在产品标签上。
选型(3)只有RS232接口。
2.2安装对于演示装置,接口和电源电缆包括在其中(参见“电连接”一节)对于其他的HMR3000选型,用户自己应按照下表制作带有标准9针阴连接器的电缆。
电源只接到第9针或第8针上。
对于多数应用,连接好表1中所列出的几个管脚就可以了,而第1、4、6和7针在HMR3000工作中执行特定的功能,平时应保持其开路(维持逻辑高电平)。
(见表1关于所有管脚的定义)。
有关HMR3000和PC机COM口的连线图请参见图1。
表1 HMR3000在平常操作时的管脚定义(参见表3的完整的定义)注意:在8脚上加的电压不要超过+5.5V,以免对元件造成损坏。
2.3HMR3000到计算机RS232的连接图2.4 电连接用上述电缆将HMR3000和PC机的COM口连接起来。
给HMR3000供电(未经稳压的输入为6-15V,经稳压的输入为5V)。
HMC1022的电子罗盘
目录引言 (2)第一章系统硬件设计 (2)1. 1 地磁场导航原理 (2)1. 2 系统构成 (2)1. 3 磁阻传感器 (3)1. 4 信号转换电路设计 (5)1. 5 传感器复位置位电路设计 (6)1. 6 微控制器的选择 (6)第二章系统软件设计 (7)2. 1 复位置位程序设计 (7)2. 2 干扰的校正 (8)2. 3 程序主流程 (9)结束语 (10)参考文献........................................... 错误!未定义书签。
引言现如今, 全球定位系统(GPS) 已经得到了广泛的应用,它借助四个卫星保持在一条基准线上就能跟踪汽车的位置, 但是在城市和隧道中卫星信号会在短时间内出现盲区, 这就需要精度很高的罗盘帮助GPS 型导航系统。
通常可以采用陀螺仪来保持跟踪, 但是陀螺仪体积大, 成本高,故障率高, 维修困难。
所以这种低成本的磁阻( MR) 型罗盘就是最佳选择。
第一章系统硬件设计1. 1 地磁场导航原理地球是个巨大的磁体, 磁力线起始于南极附近的一个点,终止于北极附近的一个点。
即: 2 个磁极。
地磁场强度约为0. 5~0. 6 Gauss, 磁力线与地球表面平行的水平分量总指向地磁北极. 我们古代就是根据这个原理发明了司南。
而本文所研究的电子罗盘应用了一种传感器, 其内部集成了一种电阻( 称为磁阻) , 磁阻在不同方向感受磁场时阻值会发生相应的变化。
本系统正是应用这种阻值的变化来设计电路的。
1. 2 系统构成本文研究的电子罗盘由磁阻传感器、信号转换电路、传感器复位置位电路、电源模块和微控制器等组成。
磁阻传感器输出经过信号处理电路和微控制器处理后得到航向角, 数码管用来显示航向角; 复位电路用于恢复磁阻传感器在强磁干扰后的灵敏度; 电源模块分别为复位电路和信号处理电路供电。
具体硬件框图如图1 所示。
图1硬件框图1. 3 磁阻传感器在铁磁性材料中会发生磁阻的非均质现象(AMR) , 当沿着一条长而且薄的铁磁合金带的长度方向施加一个电流, 在垂直于电流的方向施加一个磁场, 合金带自身的阻值会发生变化, 这就是磁阻现象, 如图2 所示。
芯扬国际提供AK8975C数据手册
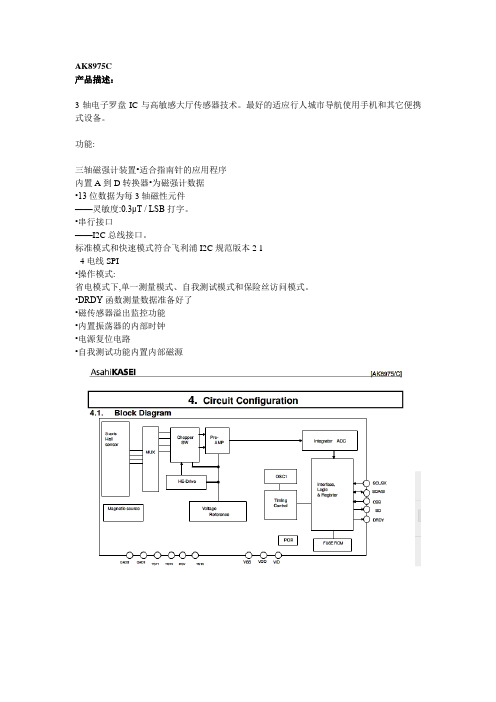
AK8975C
产品描述:
3轴电子罗盘IC与高敏感大厅传感器技术。
最好的适应行人城市导航使用手机和其它便携式设备。
功能:
三轴磁强计装置•适合指南针的应用程序
内置A到D转换器•为磁强计数据
•13位数据为每3轴磁性元件
——灵敏度:0.3μT / LSB打字。
•串行接口
——I2C总线接口。
标准模式和快速模式符合飞利浦I2C规范版本2 1
- 4电线SPI
•操作模式:
省电模式下,单一测量模式、自我测试模式和保险丝访问模式。
•DRDY函数测量数据准备好了
•磁传感器溢出监控功能
•内置振荡器的内部时钟
•电源复位电路
•自我测试功能内置内部磁源。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FAD-DCM-SPI电子罗盘模块规格书
1、模块功能:
本模块主要由高可靠、强抗干扰工业级单片机和PNI公司高可靠性的磁通传感器及驱动芯片组成,集成度非常高,实现了高可靠性、高精度、强抗磁场干扰的数码电子罗盘功能,非常方便各种产品快速增加电子罗盘功能。
本电子罗盘采用SPI接口,可输出00~3590角度,并具有正北校准及硬磁补偿功能。
2、应用范围:
后视镜方向指示,车载指南针,运动表指南针等。
3、性能特征:
○ 工作电压: 5V;
○ 低功耗;
○ –20 0C ~ +70 0C;
○ 电子指南针
● 范围: 0O ~359O;
● 精度: +/-2O;
● 分辨率: 1O;
--------------------------------------------------------------------------------------------------------------------- 地址:深圳市福田区华强北路圣廷苑酒店B座1206室
4、电路方框图:
图(1) FAD-DCM-SPI电路框图
5、模块接口规则:
5.1 引脚定义(见图12)
名称输入/输出引脚号描述
VDD I 1 工作电压5V
GND I 2 电源和信号地
RESET I 3 模块复位端(不用时悬空),高电平复位
SPICLK I 4 时钟输出端(模块接收同步)
MISO O 5 数据输出端(模块输出数据)
MOSI I 6 数据输入端(模块接收命令)
/SS I 7 片选端(模块接收)
--------------------------------------------------------------------------------------------------------------------- 地址:深圳市福田区华强北路圣廷苑酒店B座1206室
5.2 通讯协议
+5V
---------------------------------------------------------------------------------------------------------------------
地址:深圳市福田区华强北路圣廷苑酒店B 座1206室
GND
图2
模块为从机,微处理器经图2所示4线制SPI 接口与主机完成通讯。
SPI 通讯是从主机将/SS 置零开始的,SPICLK 是主机发送的时钟信号(标准频率为12.5KHZ),一开始总是为低电平,在写模式,当SPICLK 由低电平变为高电平,上升沿时主机改变MOSI 线上的电平信号,当SPICLK 为下降沿时,主机在MOSI 线上电平信号将被从机接收;在读模式,当SPICLK 由低电平变为高电平,上升沿时从机改变MISO 线上的电平信号,当SPICLK 为下降沿时,从机在MISO 线上电平信号将被主机接收。
数据位的读和写都是从高位到低位,读写时序如下图3所示。
图 3 SPI 从机 通讯时序图
5.3 命令格式
模式 命令字
从机返回数据
进入硬磁补偿模式
A0H+00H A0H
结束硬磁补偿模式 A1H+00H A1H 读磁偏角低8位模式 A6H+00H 磁偏角低8位 读磁偏角第9位模式 A7H+00H
磁偏角第9位
写磁偏角低8位模式 A8H+XXH+00H XXH 写磁偏角第9位模式 A9H+0XH+00H 0XH
正北校准模式 B0H+00H B0H
读方向角模式
5AH+00H+00H+00H+00H
低8位+第9位+累加和校验①
注①:累加和校验(2字节)=5AH+低8位+第9位;如果角度为350度,则十六进制为15EH,则累加和校验=5AH+5EH+01H=B9H; 如果角度为230度,则十六进制为0E6H,则累加和校验=5AH+E6H+00H=141H;
○ 主机发送命令字(A0H+00H),从机接收正确时进入硬磁补偿模式,并返回8位数据A0H ,无此数据则说明从机接收有误。
在硬磁补偿模式时,需保证模块水平放置情况下旋转一周。
/SS
SPICLK MOSI MISO
图 4 进入硬磁补偿模式
---------------------------------------------------------------------------------------------------------------------
地址:深圳市福田区华强北路圣廷苑酒店B 座1206室
○主机发送命令字(A1H+00H),从机接收正确时结束硬磁补偿模式,并返回8位数据A1H,无此数据则说明从机接收有误。
/SS
SPICLK
MOSI
MISO
图 5 结束硬磁补偿模式
○主机发送命令字(A6H+00H),从机接收正确时读模块磁偏角低8位数据,并返回低8位磁偏角数据,无此数据则说明从机接收有误。
/SS
SPICLK
MOSI
MISO
图 6 读模块磁偏角低8位数据模式
○主机发送命令字(A7H+00H),从机接收正确时读模块磁偏角第9位数据,并返回第9位磁偏角数据,无此数据则说明从机接收有误。
/SS
SPICLK
MOSI
MISO
图 7 读模块磁偏角第9位数据模式
--------------------------------------------------------------------------------------------------------------------- 地址:深圳市福田区华强北路圣廷苑酒店B座1206室
○主机发送命令字(A8H+XXH+00H),从机接收正确时写模块磁偏角低8位数据,并返回低8位磁偏角数据,无此数据则说明从机接收有误。
/SS
SPICLK
MOSI
MISO
图 8 写模块磁偏角低8位数据模式
○主机发送命令字(A9H+XXH+00H),从机接收正确时写模块磁偏角第9位数据,并返回第9位磁偏角数据,无此数据则说明从机接收有误。
/SS
SPICLK
MOSI
MISO
图 9 写模块磁偏角第9位数据模式
○主机发送命令字(B0H+00H),从机接收正确时进行正北校准,此方位方向角为0度,并返回8位数据B0H,无此数据则说明从机接收有误。
/SS
SPICLK
MOSI
MISO
图 10 正北校准模式
--------------------------------------------------------------------------------------------------------------------- 地址:深圳市福田区华强北路圣廷苑酒店B座1206室
○主机发送命令字(5AH+00H+00H+00H+00H),从机接收正确时返回当前方向角度9位数据和累加校验和,无此数据则说明从机接收有误。
/SS
SPICLK
MOSI
MISO
图 11 读方向角度低8位数据模式
--------------------------------------------------------------------------------------------------------------------- 地址:深圳市福田区华强北路圣廷苑酒店B座1206室
6、 工作条件:
参数
符号
最小 标准
最大 单位 工作电压 VDD
5
5.25
V
消耗电流 I stdby - uA
工作温度
T OP
-20 +70 0C
时钟频率 SPICLK 12.5 KHZ
7、 应用电路:
图12 FAD-DCM-SPI 接线图
---------------------------------------------------------------------------------------------------------------------
地址:深圳市福田区华强北路圣廷苑酒店B 座1206室。