三维空间连续系统的目标轨迹预见跟踪控制2
基于卡尔曼预测算法的云台三维空间目标跟踪

0 引 言
图像监 控 系统广泛 应用 于银 行 、 通 、 交 智能小 区等 场合 , 而现 有 的监 控 系统 尚不 能满 足许 多应 用 场合
的需要 , 主要 体现 在智 能化程 度不 够高 , 多场合 还需 要人 工 的干预 . 很 由于人工 操作具 有滞 后性 , 使很 多重 要 的场 景信息 丢失 , 而无 法抓 证取 证. 云台控 制是 监控 系统 的重要 组成 部分 , 主要 负 责控制 摄像 机 的转 动 、 变焦 等操 作. 近年来 , 用 图像 进行 目标 跟踪 与识 别 已成 为 十 分 活跃 的研 究 方 向之一 .文 献 ( 3 于移 动 利 1基 车辆 图像 进行 轮廓 提取 , 可将 目标从 背景 中提 取 出来 , 文献 ( ] 过对 图像 的边缘 检测 和 图像 中心点 的处 2通 理, 实现 了 目标 图像 的定 位 , 献 (3 述 了国 内外 各 种 被 动测 距 的方 法 和原 理 . 文 3综 当对 某 一 目标进 行 观 察 时, 总是存 在各 种干 扰 , 如系统 噪声 、 测量 噪声 等. 者提 出利 用 K l n滤波 方程 递 推 预估计 能 力对 运 动 作 ama 目标 的位 置进行 跟踪 , 时调整 云 台偏转 角度 , 及 解决 了云 台运 动滞后 所带 来 的跟踪 失效 问题. 1 目标状 态卡 尔曼预 测算 法
1 1 目标 状 态 最 优 估 计 .
卡尔曼 滤波器 常 用于对 动态 系统 的状 态进行 线性 最小 方 差误 差 估计 , 而 对 下一 个 目标运 动 状态 做 从 最 优估计 , 测时具 有稳 定 和最优 的特 点H . 预 卡尔曼 滤波 器算 法主 要包 含状 态方程 和观 测方程 , 别如 下 : 分
《2024年六自由度串联机器人运动优化与轨迹跟踪控制研究》范文
《六自由度串联机器人运动优化与轨迹跟踪控制研究》篇一一、引言随着科技的不断发展,六自由度串联机器人在工业自动化、医疗康复、军事航天等领域的应用越来越广泛。
而如何提高机器人的运动性能,使其在复杂的任务环境中实现高精度的轨迹跟踪控制,成为当前研究的热点问题。
本文将针对六自由度串联机器人的运动优化与轨迹跟踪控制进行研究,旨在提高机器人的运动性能和作业精度。
二、六自由度串联机器人概述六自由度串联机器人是一种多关节机器人,具有六个独立的运动轴,能够实现空间三维运动。
其结构紧凑、灵活度高、适应性强,在许多领域得到广泛应用。
然而,由于其复杂的运动学和动力学特性,使得其运动控制和轨迹跟踪成为一大挑战。
三、运动优化研究(一)优化算法研究针对六自由度串联机器人的运动优化问题,本文采用基于遗传算法的优化方法。
遗传算法是一种模拟自然进化过程的优化算法,能够快速寻找到全局最优解。
通过对机器人运动学模型进行建模,将机器人的运动轨迹优化问题转化为一个求解最优解的问题,运用遗传算法进行求解。
(二)运动学模型建立为了实现机器人的运动优化,需要建立精确的运动学模型。
本文采用D-H(Denavit-Hartenberg)法建立机器人的运动学模型,通过求解机器人各关节之间的变换矩阵,得到机器人末端执行器的位置和姿态。
在此基础上,进一步分析机器人的工作空间、奇异形态等问题,为后续的轨迹规划和控制提供依据。
四、轨迹跟踪控制研究(一)控制器设计为了实现六自由度串联机器人的高精度轨迹跟踪控制,本文采用基于PID(比例-积分-微分)控制器的控制策略。
通过对机器人运动过程中的速度、加速度等参数进行实时调整,使机器人能够快速、准确地跟踪设定的轨迹。
同时,针对机器人系统的非线性和不确定性,引入自适应控制算法,提高系统的鲁棒性。
(二)轨迹规划与实现轨迹规划是轨迹跟踪控制的关键环节。
本文采用基于时间最优的轨迹规划方法,根据机器人的运动学模型和任务要求,生成平滑、连续的轨迹。
轨迹控制有关概念和计算

轨迹控制有关概念和计算轨迹控制是指在机器人或移动机械系统中,通过控制系统使其能够按照所预定的轨迹运动。
轨迹控制涉及到轨迹的描述和计算、路径规划以及控制算法等多个方面。
在机器人领域,轨迹控制可以应用于各种任务,如自动驾驶、工业机械臂、机器人手和腿的运动等。
轨迹的描述可以采用多种形式,包括直角坐标系、极坐标系和参数方程等。
在直角坐标系中,轨迹可以简单地由一系列离散的点或者由连续的函数描述。
在极坐标系中,轨迹可以由极坐标的弧长和角度来描述。
在参数方程中,轨迹可以通过参数t的变化来描述物体在时间上的运动。
轨迹的计算可以通过数学公式、几何算法和仿真模拟等方法来进行。
数学公式可以根据具体的物体形状和运动规律来求解轨迹。
几何算法可以利用几何学的原理和规则来计算轨迹。
仿真模拟可以通过计算机模拟来获取预期的轨迹,然后根据实际情况进行调整和优化。
路径规划是轨迹控制中的一个重要环节,主要涉及到自动生成机器人移动的路径。
路径规划的目标是在给定约束条件下找到一条最优路径,使得机器人能够以最短的时间、最小的能量消耗或者其他指标移动到目标位置。
路径规划算法可以分为离线规划和在线规划两种类型。
离线规划是在机器人开始移动之前,提前计算好一条完整的路径。
在线规划是机器人在移动过程中不断更新路径。
在轨迹控制中,控制算法扮演着重要的角色。
控制算法可以根据轨迹的描述和当前机器人的状态,计算出合适的控制指令。
常见的控制算法包括PID(Proportional-Integral-Derivative)控制算法、模糊控制算法和神经网络控制算法等。
PID控制算法是一种常用的经典控制算法,通过测量偏差和误差的变化率来调节控制指令。
模糊控制算法可以处理非线性系统和模糊输入输出的控制问题。
神经网络控制算法可以利用神经网络的强大逼近能力来对复杂的控制问题进行建模和求解。
除了概念和计算,轨迹控制还涉及到实际应用中的问题和挑战。
例如,轨迹控制需要考虑机器人的动力学和力学特性,以便保证机器人能够按照预期的轨迹进行移动。
AUV三维空间轨迹跟踪控制方法研究的开题报告

AUV三维空间轨迹跟踪控制方法研究的开题报告一、选题背景和意义随着科技的发展和应用的需求,水下机器人逐渐发展成为一个重要的领域。
AUV(Autonomous Underwater Vehicle)是一种自主水下机器人,具有无线电远程或完全自主控制的能力,可以应用于海底勘探、海洋环境监测、潜水作业等领域。
AUV需要在水下自主控制自身的运动,达到指定的目标位置和姿态,因此需要开发一种高效的控制方法来保证AUV的运动质量和可靠性。
二、研究内容和目标本文将研究AUV的三维空间轨迹跟踪控制方法。
目的是设计一个能够实现自主运动的控制系统,使AUV能够从一般的起始位置在三维空间中实现到达目标点,并达到指定的姿态。
在此基础上,进一步考虑系统的鲁棒性和适应性。
三、预期的研究内容和方法1.系统建模。
针对AUV的三维运动特点,设计AUV的数学模型,包括质量、惯性矩阵、水动力学特性以及控制系统的仿真模型。
2.设计控制策略。
采用PID控制器或其他先进的控制算法设计控制策略,以实现AUV的三维空间轨迹跟踪和姿态控制。
3.仿真实验。
使用MATLAB或其它仿真软件,对设计的控制系统进行仿真实验,从而验证控制系统的性能、鲁棒性和适应性。
4.控制系统测试。
基于仿真实验结果,对控制系统进行实际AUV测试,验证系统的实际性能,并对测试结果进行分析和总结。
四、预期结果通过本次研究,期望设计出一个鲁棒性强、性能优良、适应性宽广的AUV三维空间轨迹跟踪控制系统,实现AUV在水下环境中自主运动的目标。
五、预期应用和推广价值本文的研究成果可以应用于海洋勘探、海洋环境监测、潜水作业和深海探测等领域,为人们的海底探索、资源开发和科研提供了更加先进和有效的技术手段。
在此基础上,可以进一步研究AUV的多机协同控制和智能决策等问题。
国家开放大学电大《机电一体化系统》机考三套标准试题及答案2
国家开放大学电大《机电一体化系统》机考三套标准试题及答案2国家开放大学电大《机电一体化系统》机考三套标准试题及答案盗传必究第一套一、判断题 1.安全可靠性高是机电一体化产品与传统机电产品相比唯一具有的优越性。
F 2.在机电一体化系统中,通过提高驱动元件的驱动力可有效提高系统的稳定性。
F 3.滚珠丝杠副的轴向间隙是承载时在滚珠与滚道型面接触点的弹性变形所引起的螺母位移量和螺母原有间隙的总和。
T 4.转换元件能将敏感元件输出非电物理量(如位移、应变、光强等)转换成电参数量(如电阻、电感、电容等 T 5.灵敏度(测量)时传感器在静态标准条件下输入变化对输出变化的比值。
T 6.SPWM是正弦波脉冲宽度调制的缩写。
T 7.直流伺服电动机在一定电磁转矩T(或负载转矩)下的稳态转速n随电枢的控制电压U正确答案:变化而变化的规律,称为直流伺服电动机的调节特性。
T 8.无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。
F 9. I/O接口电路也简称接口电路。
它是主机和外围设备之间交换信息的连接部件(电路)。
它在主机和外围设备之间的信息交换中起着桥梁和纽带作用。
T 10.圆柱坐标式机器人具有二个转动关节和一个移动关节,具有三个自由度 F 11. 执行机构是机器人完成作业的机械实体,具有和手臂相似的动作功能,是可在空间抓放物体或进行其它操作的机械装置。
T 12. FML是表示柔性制造单元 T 13. FMS具有优化的调度管理功能,无需过多的人工介入,能做到无人加工 T 14.三维扫描器不可以扫描二维图像 F 二、单选题 1.()不是机电一体化产品正确答案:机械式打字机 2. 在设计齿轮传动装置时,对于转动精度的降速齿轮传动链,可按什么原则进行设计正确答案:输出轴转角误差最小 3. 由电信号处理部分和液压功率输出部分组成的控制系统是()。
正确答案:电液伺服系统 4. 通过“手把手”方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,这种方式称为() 正确答案:“示教再现”方式 5. 对于只进行二维平面作业的工业机器人只需要三自由度,若要使操作具有随意的位姿,则工业机器人至少需要几个自由度()。
3d目标跟踪综述

3d目标跟踪综述全文共四篇示例,供读者参考第一篇示例:3D目标跟踪是计算机视觉领域的一个重要研究方向,它旨在追踪三维空间中的目标,并实现对目标在空间中的位置动态跟踪。
目标跟踪在现实生活中有着广泛的应用,如自动驾驶、智能监控、增强现实等领域。
随着深度学习、传感技术和计算能力的不断进步,3D目标跟踪技术也取得了长足的发展,并在各个领域展现出了巨大的潜力。
在3D目标跟踪的研究中,一个关键问题是如何从视频序列或传感器数据中提取目标的位置、姿态和运动信息。
传统的2D目标跟踪技术通常只能提取目标在图像平面上的位置信息,而3D目标跟踪则要求获取目标在空间中的三维坐标信息。
为了实现这一目标,研究者们提出了各种不同的算法和方法,包括基于几何信息的方法、基于深度学习的方法、基于传感器融合的方法等。
在基于几何信息的方法中,研究者通常会利用单目或双目摄像头、激光雷达等传感器获取目标的深度信息,并使用几何学原理推断目标的位置和运动状态。
这类方法通常需要较为复杂的计算和较高的传感器精度,但在一些场景下能够取得很好的效果。
基于深度学习的方法则通过训练神经网络模型来学习目标的特征表示,并从中推断目标的位置和运动状态。
这类方法通常能够在大数据集上取得较好的效果,并且具有较强的泛化能力。
除了上述两种方法外,还有一些基于传感器融合的方法,如结合摄像头、激光雷达、GPS等传感器的数据来实现目标跟踪。
这类方法通常能够利用不同传感器的优势,提高跟踪的准确性和稳定性。
还有一些基于滤波器的方法,如卡尔曼滤波、粒子滤波等,用于融合传感器数据、估计目标状态和预测目标位置。
这些方法在实时性和鲁棒性方面有着较高的性能。
3D目标跟踪是一个积极发展的研究领域,涉及到多个学科领域的知识和技术,如计算机视觉、机器学习、传感技术等。
随着技术的不断进步和应用场景的扩大,我们相信3D目标跟踪技术将在未来发挥出更大的作用,并为人类社会的发展做出更大的贡献。
希望未来能够有更多的研究者参与到这一领域的研究中,共同推动3D目标跟踪技术的发展和应用。
《轨迹控制》PPT课件
2.2 轨道类型 常规二维定向井轨道类型:按照我
国钻井行业标准规定,有四种类型: 三段式,多靶三段式,五段式和双 增式,如图5-20~5-23所示。不同类 型的轨道,它们的设计条件和计算 公式各不相同。
46
47
48
49
50
关节点:图中的字母K 代表造斜点, b 代表增斜结束点,t 代表目标点, c 代表五段式的降斜始点或双增式 的第二次造斜点,d 代表多目标井 的目标终点。所有这些点称为关节 点。这些关节点的参数均以相应字 母为下标。
57
磁性测斜仪的原理:如图5-8所示,罗 盘靠一顶尖支撑,可在仪器中灵活转动, 不管仪器外壳如何转动,罗盘的S极始 终指北。在仪器中心悬挂一个“十字” 重锤,不管仪器外壳如何倾斜,重锤始 终指向重力方向。
静止测量时,照相机对着透明的罗盘面 照相,所以“十字”图形也被照在底片 上。然后相机自动进卷,再记录下图 参看图5-7,设想经过井眼轨迹上 的每一个点作一条铅垂线,所有这 些铅垂线就构成了一个曲面,在数 学上称作柱面。其特点是可以展平 到一个平面上,就形成了垂直剖面 图。该图的两个坐标是垂深D 和水 平长度Lp。
36
37
第二节 井眼轨道设计
1 井眼分类
分类标准说明:按轨道。
磁偏角校正:目前广泛使用的磁性测斜仪是 以地球磁北方位为基准的,所测得的井斜方 位角为磁方位角,并不是真方位角。需要经 过换算求得真方位角,称为磁偏角校正: 真方位角=磁方位角+东磁偏角 真方位角=磁方位角-西磁偏角
16
1.4 轨迹基本参数的特性 问题讨论: 1)井深、井斜角和井斜方位角3参
1)地面环境条件的限制; 2)地下地质条件的要求; 3)处理井下事故的需要。 4 井眼轨迹控制(导向)基本方法
空间机器人自主捕获目标的轨迹规划与控制研究

空间机器人自主捕获目标的轨迹规划与控制研究一、概述随着科技的不断发展,空间机器人在太空探索、资源开采、卫星维修、在轨服务等领域的应用日益广泛。
在这些应用中,空间机器人需要自主捕获目标,并进行精确的轨迹规划与控制,以实现高效、安全的任务执行。
对空间机器人自主捕获目标的轨迹规划与控制进行研究具有重要的理论价值和实际应用意义。
空间机器人自主捕获目标的轨迹规划与控制涉及多个关键技术,包括目标识别与定位、轨迹规划、控制算法设计、动力学建模与优化等。
目标识别与定位是轨迹规划与控制的前提,需要准确获取目标的位置和姿态信息。
轨迹规划则需要根据任务需求和空间环境,设计出满足约束条件的机器人运动轨迹。
控制算法设计则需要考虑空间机器人的动力学特性和控制精度要求,以实现精确的运动控制。
本文旨在探讨空间机器人自主捕获目标的轨迹规划与控制方法,重点研究目标识别与定位、轨迹规划、控制算法设计等方面的关键技术。
对空间机器人的动力学建模与优化进行分析,为后续的轨迹规划与控制提供理论基础。
研究基于视觉的目标识别与定位方法,实现对目标的快速准确识别。
接着,针对空间机器人自主捕获目标的任务需求,设计满足约束条件的轨迹规划算法。
研究基于优化算法的控制策略,实现对空间机器人的精确运动控制。
通过本文的研究,旨在为空间机器人自主捕获目标的轨迹规划与控制提供有效的理论支持和技术指导,推动空间机器人在太空探索、资源开采、卫星维修等领域的应用发展。
1. 研究背景与意义随着空间技术的发展,空间机器人在执行深空探测、在轨服务、空间基础设施建设等任务中发挥着越来越重要的作用。
这些任务往往要求空间机器人具备高度的自主性和精确的操作能力,尤其是在复杂、不确定的空间环境中。
空间机器人的轨迹规划与控制技术成为实现其高效、安全执行任务的关键。
研究空间机器人自主捕获目标的轨迹规划与控制,具有重大的理论与实际意义。
从理论层面来看,这一研究有助于深化和完善空间机器人学的基本理论,推动其从传统的遥控操作向智能化、自主化方向发展。
国家开放大学电大《机电一体化系统》机考二套标准试题及答案1

国家开放大学电大《机电一体化系统》机考二套标准试题及答案1国家开放大学电大《机电一体化系统》机考二套标准试题及答案盗传必究第一套一、判断题(每题2分,共28分)1.机电一体化是在以机械、电子技术和计算机科学为主的多门学科相互渗透、相互结合过程中逐渐形成和发展起来的一门新兴边缘技术学科。
T2.PWM三个自由度关节坐标式机器人一定具有三个转动关节并且三个关节轴线是平行的。
F3.PWM执行机构是机器人完成作业的机械实体,具有和手臂的动作功能,是可在空间抓放物体或进行其它操作的机械装置。
T4.PWM铣削加工中心可完成镗、铣、钻、攻螺纹等工作,与普通数控镗床和数控铣床的区别之处主要在于,它附有刀库和自动换刀装置。
T5.FMS通过简单的软件系统变更,便能制造出某一零件族的多种零件。
T6.FMS三维扫描仪是融合光、机、电和计算机技术于一体的高新科技产品。
T7.在机电一体化系统中,通过提高系统的阻尼能力可有效提高系统的稳定性。
T8.滚珠丝杠副在使用过程中,除了要求本身单一方向的传动精度较高以外,还对其轴向间隙有着严格的要求,从而保证其反向的传动精度。
T9.敏感元件不可直接感受被测量,以确定关系输出某一物理量,如弹性敏感元件将力转换为位移或应变输出。
F10.灵敏度(测量)是传感器在静态标准条件下输入变化对输出变化的比值。
T11.PWM信号一般可由单片机产生。
T12.PWM伺服控制系统的比较环节是将系统的反馈信号与输入的指令信号进行比较,以获得输出与输入之间的偏差信号。
T13.PWM无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。
F14.PWM计算机控制系统由硬件和软件两大部分组成。
其中,硬件主要由计算机主机、接口电路、输入/输出通道及外部设备等组成。
T二、单项选择题(每题3分,共30分)15.机电一体化系统的基本功能要素之一接口的基本功能是()正确答案:以上三者16()测距是借助三角形几何关系,求得扫描中心到扫描对象的距离,激光发射点和电荷耦合元件()接收点位于高精度基线两端,并与目标反射点构成一个空间平面三角形。
三维空间位置定位方法

三维空间位置定位方法一、引言三维空间位置定位方法是指在三维坐标系中确定一个物体或者目标的具体位置和方向的方法。
在现代科技发展中,三维空间位置定位方法被广泛应用于航空航天、导航、地理信息系统、虚拟现实等领域。
本文将介绍几种常见的三维空间位置定位方法。
二、全球定位系统(GPS)全球定位系统是一种基于卫星导航的三维空间位置定位方法。
通过接收多颗卫星发射的信号,利用三角定位原理计算出接收器的三维坐标。
GPS系统由24颗主动卫星和若干地面控制站组成,可以在全球范围内提供高精度的位置定位服务。
GPS已经成为导航、车载导航、船舶定位和军事等领域中最常用的三维空间定位方法之一。
三、惯性导航系统惯性导航系统是一种基于惯性测量单元(IMU)的三维空间位置定位方法。
IMU由加速度计和陀螺仪组成,通过测量物体的加速度和角速度,利用积分计算出物体的位置和姿态。
惯性导航系统不受外界环境干扰,可以在没有GPS信号的环境下提供连续的位置定位服务。
然而,由于积分误差的累积,惯性导航系统的精度会随时间的推移而降低。
四、视觉定位系统视觉定位系统是一种基于摄像头或者摄像头阵列的三维空间位置定位方法。
通过对环境中的特征点进行提取和匹配,利用三角定位原理计算出相机的位置和姿态。
视觉定位系统可以实时获取物体的位置信息,并且不受外界环境的影响。
然而,视觉定位系统对环境中的光照条件、遮挡物和特征点的数量等因素较为敏感,会影响定位精度。
五、声纳定位系统声纳定位系统是一种基于声波传播的三维空间位置定位方法。
通过发送声波信号,并测量信号的传播时间和接收信号的强度,利用声速和声纳阵列等原理计算出目标的位置。
声纳定位系统在水下环境中应用广泛,可以实现对海洋中的船舶、鱼群等目标进行准确定位。
然而,声纳定位系统受到水下环境的影响,如水温、盐度、海流等因素都会对声波传播产生影响,从而影响定位精度。
六、激光定位系统激光定位系统是一种基于激光测距原理的三维空间位置定位方法。
空间目标跟踪与识别技术的研究
空间目标跟踪与识别技术的研究第一章:引言空间目标跟踪与识别技术是当今航天领域的重要研究方向之一。
随着航天技术的不断发展和应用领域的扩大,对于空间目标的跟踪与识别需求越来越迫切。
本文将对空间目标跟踪与识别技术的研究进行深入探讨,以期为航天领域的相关研究提供一定的参考。
第二章:空间目标的特点及跟踪技术2.1 空间目标的特点空间目标与地面目标相比,具有移动速度快、自由度高等特点。
此外,空间目标还存在着远距离观测、目标识别困难等问题。
了解空间目标的特点对于后续的跟踪与识别技术的研究至关重要。
2.2 空间目标跟踪技术空间目标跟踪技术是指利用传感器等设备对空间目标进行实时、连续的跟踪与监测。
常用的空间目标跟踪技术包括基于传感器测量数据的最小二乘法、卡尔曼滤波器等。
第三章:空间目标的识别技术3.1 空间目标识别的需求在现实场景中,存在大量未知的空间目标,对其进行准确的识别成为一项重要的任务。
通过识别目标的形状、光谱信息等特征,可以对空间目标进行分类和归类。
3.2 空间目标识别技术空间目标识别技术主要包括图像处理、模式识别、深度学习等方面的技术。
图像处理技术可以对图像进行增强、滤波等处理,以提取目标特征;模式识别技术可以通过对目标图像进行特征提取和分类,实现目标的自动识别;深度学习技术则可以通过构建神经网络模型,实现对空间目标的自动学习和识别。
第四章:空间目标跟踪与识别技术的应用4.1 航天任务中的空间目标跟踪与识别技术在航天任务中,灵敏准确的空间目标跟踪与识别技术对于任务的顺利完成至关重要。
通过实时监测和识别空间目标,可以提供数据支撑和信息保障,有助于改善任务的执行效率和安全性。
4.2 空间目标跟踪与识别技术在军事领域的应用军事领域对于空间目标的跟踪与识别有着更高的要求。
通过实时监测和识别敌方空间目标,可以及时获取敌情信息,为军事行动提供指导和支持。
第五章:空间目标跟踪与识别技术存在的挑战与未来展望5.1 技术挑战空间目标跟踪与识别技术面临着目标尺度变化、光照条件变化、背景复杂等挑战。
空间运动目标跟踪技术研究

空间运动目标跟踪技术研究随着人类的科技水平和工业技术的不断发展,人们对于空间运动目标的跟踪技术也不断进行研究和改进。
空间运动目标可以被定义为在太空中运行的人造物体,比如卫星、空间站等等。
由于其在太空中高速运动,因此对于它们的跟踪需要高精度的技术支持。
本文将会探讨一些目前常用的空间运动目标跟踪技术及其优缺点。
一、天文学方法天文学方法是一种在学术研究中常用的跟踪技术。
这种方法利用星光和光学设备来确定目标的位置。
通过在空间目标周围的明亮星星中寻找目标的定位,从而使用几何原理计算出目标位置、速度和轨道。
这种技术的优点是全天候适用,且可以使样本量得到扩大,让学术研究更具代表性。
然而,这种自动化程度较低,在实际应用中不如其他技术更为有效。
二、追踪雷达追踪雷达是一种使用雷达技术跟踪空间运动目标的方法。
这种技术利用雷达探测目标并通过测量目标所反射回来的电磁波的时间延迟和频率来确定目标的位置、速度和轨道。
相比天文学方法,追踪雷达毫无疑问可以在实际应用中更有效。
追踪雷达可以在不同天气条件下进行跟踪,自动化程度更高,更适合于工业领域的运用。
此外,雷达技术的时间分辨率较高,可以为目标频繁出现的情形下提供更为精确的测量结果。
不过同时,追踪雷达也有其不足之处,比如波束角的限制等。
需要在实际应用中综合考虑各种因素,以便得到最优的跟踪结果。
三、光学方法光学方法是一种利用反射镜、光学透镜和光学望远镜等设备来跟踪空间运动目标的方法。
由于太空目标通常具有较高的速度,因此在跟踪过程中也需要高速、高精度的光学设备。
这种方法的优点在于可以追踪目标较小、距离较远的物体,并对空间目标的轨道进行实时追踪。
但是,这种技术通常需要在较好的光线条件下才能实现,同时由于地球自转速度的限制,不能对地球未照亮的一侧目标进行跟踪。
四、GPSGPS(全球卫星定位系统)是一种利用卫星计算出地球任意地点经度、纬度和海拔的技术。
GPS也可以用于测量、追踪空间运动目标的位置、速度和轨道。
三维斑点追踪技术 原理

三维斑点追踪技术原理
三维斑点追踪技术是一种用于跟踪物体在三维空间中运动的先进技术。
它可以被广泛应用于计算机视觉、虚拟现实、增强现实、医学影像等领域。
这项技术的原理是利用计算机算法和传感器数据来确定物体在三维空间中的位置和运动轨迹。
在三维斑点追踪技术中,通常会使用多个摄像头或传感器来捕捉物体的运动轨迹。
这些摄像头或传感器会记录下物体在不同时间点的位置和姿态,然后通过计算机算法对这些数据进行处理,从而得出物体在三维空间中的精确位置和运动轨迹。
关键的原理在于如何准确地识别和跟踪物体上的斑点或标记。
这些斑点可以是特殊的标记物,也可以是物体本身的特征点。
通过识别和跟踪这些斑点,计算机可以推断出物体的运动轨迹,实现对物体运动的精确跟踪。
三维斑点追踪技术的原理基于计算机视觉和图像处理的理论,结合了传感器技术和数学算法。
通过不断地优化算法和提高传感器的精度,这项技术可以实现对物体运动的高精度跟踪,为各种应用领域提供了强大的工具和支持。
总的来说,三维斑点追踪技术的原理是利用计算机算法和传感器数据来识别和跟踪物体在三维空间中的运动轨迹,为各种领域的应用提供了强大的技术支持。
随着技术的不断进步和应用范围的扩大,相信这项技术将会在未来发挥越来越重要的作用。
空间目标目标跟踪与识别技术研究

空间目标目标跟踪与识别技术研究是航天领域中的重要课题之一。
在宇宙空间中,空间目标如卫星、火箭等航天器需要不断地被跟踪和识别,以便进行正确的姿态控制和运行状态监测。
因此,研究开发高精度的空间目标目标跟踪与识别技术对于保障航天运行安全、提高运行效率和技术竞争力都具有重要的价值。
目标跟踪技术是指对于一个移动目标,通过对视频、图像等信息的处理和分析,将其在连续帧之间进行轨迹的追踪。
在航天领域中,由于空间目标自身环境复杂多变,众多干扰因素对目标本身运动的影响和干扰也相当鲜明,因此如何有效地跟踪目标并从中提取有用信息是目标跟踪技术面临的主要挑战。
基于这一需求,近年来涌现了大量的针对空间目标的目标跟踪算法,其中较为常见的有基于模型的跟踪算法、基于统计的跟踪算法和基于特征的跟踪算法。
模型跟踪算法是指通过对目标运动的建模,利用数学模型对目标进行跟踪。
这一算法的优点在于准确性较高,但是对模型要求较高,要考虑各种因素对模型的影响,且算法复杂性较大。
统计跟踪算法是基于概率统计的方法,它通过统计目标在某一帧图像上的分布,推断目标在下一帧图像中的位置。
这一算法的优点是在目标运动不规则时能够较好地跟踪目标,但是对于噪声和干扰较为敏感。
特征跟踪算法是指通过提取目标在图像上的特征点,在连续帧之间对特征点进行跟踪。
这一算法的优点是简单易实现,但在目标形态发生变化时容易失效。
目标识别技术是指通过获取目标的特定特征和特征描述符,并将其与已知目标数据库进行匹配,对目标进行识别和分类。
在航天领域中,目标识别的需求体现在从卫星图像中识别己方卫星和敌方卫星等情形。
目标识别技术的主要难点在于目标特征的提取和描述,以及目标特征之间的匹配问题。
常见的目标识别算法有基于颜色、形状、纹理、轮廓和深度学习等方法。
无论是目标跟踪还是目标识别技术,都需要依赖于一定的观测手段和设备,包括航天器、卫星、相机、雷达等。
同时,为保证目标跟踪与识别的精度和准确性,需要进一步研究和发展更高精度的传感器和观测设备,以及更加智能和自适应的计算和分析算法。
空间目标跟踪技术研究及应用开发

空间目标跟踪技术研究及应用开发空间目标跟踪技术是指利用遥感技术获取空间图像信息并对空间目标进行跟踪、定位、识别等技术。
这是现代化军事技术的重要组成部分,也是航空航天技术和地球科学研究的基础。
随着空间技术的发展,空间目标跟踪技术越来越受到关注,并得到了广泛的应用。
一、空间目标跟踪技术的研究现状在不断发展的空间目标跟踪技术领域,研究者们一直在探索新的技术方法和应用场景。
目前,空间目标跟踪技术的研究可以分为以下几个方面:1、图像处理技术图像处理技术是一项关键的技术领域,它在空间目标跟踪技术中的作用不可忽视。
图像处理技术主要包括数字图像处理、目标识别、图像匹配等内容。
通过对图像进行分析和处理,可以获得目标的位置、速度等关键信息,为后续的空间目标跟踪打下基础。
2、雷达探测技术雷达技术是一种基于电磁波的探测技术,它可以有效地跟踪空间目标,提供更加精确的目标信息。
目前,雷达技术已经广泛应用于空间目标跟踪领域,特别是在军事和民用卫星中得到了广泛应用。
3、光学跟踪技术光学跟踪技术是一种高精度的技术手段,它可以对空间目标进行精确定位和跟踪。
光学跟踪技术主要包括望远镜、星敏器等设备,可以为航天器的姿态掌控、空间目标跟踪和姿态测量等方面提供重要的支撑。
二、空间目标跟踪技术的应用开发除了在科学研究和军事领域得到广泛的应用之外,空间目标跟踪技术也在民用领域中发挥着重要作用。
1、北斗卫星导航系统北斗卫星导航系统是我国自主研发的全球卫星导航系统,可以为多种应用场景提供高精度的定位和导航服务。
空间目标跟踪技术在北斗卫星导航系统中发挥了重要的作用,可以实现对卫星运动轨迹的跟踪和预测,提高卫星的运行效率和使用寿命。
2、卫星遥感应用卫星遥感技术是目前最为广泛应用的一种技术,它可以获取全球各地的高分辨率图像数据,为地球科学研究、自然资源管理和环境监测等领域提供了基础数据。
空间目标跟踪技术可以对卫星图像进行跟踪和识别,提高图像的分辨率和质量。
如何使用计算机视觉技术实现实时目标追踪和多目标跟踪

如何使用计算机视觉技术实现实时目标追踪和多目标跟踪实时目标追踪和多目标跟踪是计算机视觉领域中的重要任务,对于许多应用领域具有广泛的实用性和价值。
本文将介绍如何使用计算机视觉技术实现这两个任务,并探讨其中的关键技术和挑战。
首先,我们需要了解实时目标追踪和多目标跟踪的基本概念。
实时目标追踪是指在连续的图像序列中,通过识别和跟踪特定的目标物体,实时地反馈目标的位置和运动状况。
多目标跟踪则是指同时追踪多个目标物体,并准确地区分和跟踪它们的轨迹和运动。
要实现这两个任务,计算机视觉技术可以通过以下步骤来完成:1. 目标检测:目标检测是指在图像或视频中识别和定位感兴趣的目标物体。
常用的目标检测算法包括基于传统特征的方法(如Haar特征、HOG特征)和基于深度学习的方法(如Faster R-CNN、YOLO、SSD等)。
这些算法可以通过训练一个目标检测器来识别特定类别的目标。
2. 目标跟踪:目标跟踪是指在图像序列中对已知目标进行连续追踪,以实时地预测目标的位置和运动。
常见的目标跟踪算法包括基于相关滤波器的方法(如MOSSE、KCF)、基于学习的方法(如机器学习和深度学习)和基于粒子滤波器的方法(如卡尔曼滤波器、粒子滤波器)。
这些算法可以根据目标的特征和上下文信息进行目标位置的更新。
3. 多目标跟踪:多目标跟踪涉及同时追踪多个目标,其中每个目标都可能存在遮挡、交互和运动模式的变化等复杂情况。
常见的多目标跟踪算法包括基于深度学习的方法(如DeepSORT、SORT)、基于图论的方法(如匈牙利算法)和基于粒子滤波器的方法(如多粒子滤波器)。
这些算法可以通过建立目标间的关联关系和运动模型来实现多目标跟踪。
在实际应用中,实时目标追踪和多目标跟踪面临着一些挑战。
首先,目标的外观和运动特征可能因为遮挡、变化的环境光照和视角等因素而变化,导致跟踪算法容易出错。
其次,目标之间可能存在相似的外观和运动模式,需要利用上下文信息或特定的目标特征来进行区分。
基于激光雷达的无人驾驶3D多目标跟踪
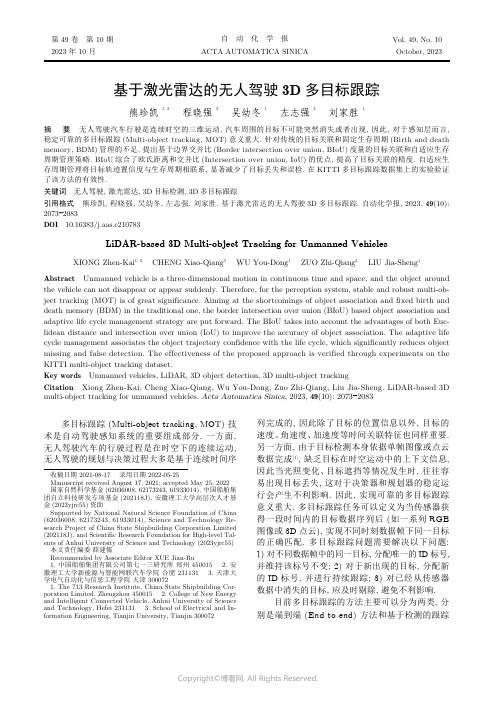
基于激光雷达的无人驾驶3D 多目标跟踪熊珍凯 1, 2程晓强 3吴幼冬 1左志强 3刘家胜1摘 要 无人驾驶汽车行驶是连续时空的三维运动, 汽车周围的目标不可能突然消失或者出现, 因此, 对于感知层而言,稳定可靠的多目标跟踪(Multi-object tracking, MOT)意义重大. 针对传统的目标关联和固定生存周期(Birth and death memory, BDM)管理的不足, 提出基于边界交并比(Border intersection over union, BIoU)度量的目标关联和自适应生存周期管理策略. BIoU 综合了欧氏距离和交并比(Intersection over union, IoU)的优点, 提高了目标关联的精度. 自适应生存周期管理将目标轨迹置信度与生存周期相联系, 显著减少了目标丢失和误检. 在KITTI 多目标跟踪数据集上的实验验证了该方法的有效性.关键词 无人驾驶, 激光雷达, 3D 目标检测, 3D 多目标跟踪引用格式 熊珍凯, 程晓强, 吴幼冬, 左志强, 刘家胜. 基于激光雷达的无人驾驶3D 多目标跟踪. 自动化学报, 2023, 49(10):2073−2083DOI 10.16383/j.aas.c210783LiDAR-based 3D Multi-object Tracking for Unmanned VehiclesXIONG Zhen-Kai 1, 2 CHENG Xiao-Qiang 3 WU You-Dong 1 ZUO Zhi-Qiang 3 LIU Jia-Sheng 1Abstract Unmanned vehicle is a three-dimensional motion in continuous time and space, and the object around the vehicle can not disappear or appear suddenly. Therefore, for the perception system, stable and robust multi-ob-ject tracking (MOT) is of great significance. Aiming at the shortcomings of object association and fixed birth and death memory (BDM) in the traditional one, the border intersection over union (BIoU) based object association and adaptive life cycle management strategy are put forward. The BIoU takes into account the advantages of both Euc-lidean distance and intersection over union (IoU) to improve the accuracy of object association. The adaptive life cycle management associates the object trajectory confidence with the life cycle, which significantly reduces object missing and false detection. The effectiveness of the proposed approach is verified through experiments on the KITTI multi-object tracking dataset.Key words Unmanned vehicles, LiDAR, 3D object detection, 3D multi-object trackingCitation Xiong Zhen-Kai, Cheng Xiao-Qiang, Wu You-Dong, Zuo Zhi-Qiang, Liu Jia-Sheng. LiDAR-based 3D multi-object tracking for unmanned vehicles. Acta Automatica Sinica , 2023, 49(10): 2073−2083多目标跟踪 (Multi-object tracking, MOT) 技术是自动驾驶感知系统的重要组成部分. 一方面,无人驾驶汽车的行驶过程是在时空下的连续运动,无人驾驶的规划与决策过程大多是基于连续时间序列完成的, 因此除了目标的位置信息以外, 目标的速度、角速度、加速度等时间关联特征也同样重要.另一方面, 由于目标检测本身依据单帧图像或点云数据完成[1], 缺乏目标在时空运动中的上下文信息,因此当光照变化、目标遮挡等情况发生时, 往往容易出现目标丢失, 这对于决策器和规划器的稳定运行会产生不利影响. 因此, 实现可靠的多目标跟踪意义重大. 多目标跟踪任务可以定义为当传感器获得一段时间内的目标数据序列后 (如一系列RGB 图像或3D 点云), 实现不同时刻数据帧下同一目标的正确匹配. 多目标跟踪问题需要解决以下问题:1) 对不同数据帧中的同一目标, 分配唯一的ID 标号,并维持该标号不变; 2) 对于新出现的目标, 分配新的ID 标号, 并进行持续跟踪; 3) 对已经从传感器数据中消失的目标, 应及时剔除, 避免不利影响.目前多目标跟踪的方法主要可以分为两类, 分别是端到端 (End to end) 方法和基于检测的跟踪收稿日期 2021-08-17 录用日期 2022-05-25Manuscript received August 17, 2021; accepted May 25, 2022国家自然科学基金(62036008, 62173243, 61933014), 中国船舶集团自立科技研发专项基金(202118J), 安徽理工大学高层次人才基金(2023yjrc55)资助Supported by National Natural Science Foundation of China (62036008, 62173243, 61933014), Science and Technology Re-search Project of China State Shipbuilding Corporation Limited (202118J), and Scientific Research Foundation for High-level Tal-ents of Anhui University of Science and Technology (2023yjrc55)本文责任编委 薛建儒Recommended by Associate Editor XUE Jian-Ru1. 中国船舶集团有限公司第七一三研究所 郑州 4500152. 安徽理工大学新能源与智能网联汽车学院 合肥 2311313. 天津大学电气自动化与信息工程学院 天津 3000721. The 713 Research Institute, China State Shipbuilding Cor-poration Limited, Zhengzhou 4500152. College of New Energy and Intelligent Connected Vehicle, Anhui University of Science and Technology, Hefei 2311313. School of Electrical and In-formation Engineering, Tianjin University, Tianjin 300072第 49 卷 第 10 期自 动 化 学 报Vol. 49, No. 102023 年 10 月ACTA AUTOMATICA SINICAOctober, 2023(Tracking by detection) 方法. 前者将目标检测与跟踪视为一个统一的过程, 输入单帧图像或点云数据, 直接输出带有唯一ID标号的目标检测框信息;后者则将检测与跟踪视为递进过程, 首先使用目标检测网络如Complex-YOLO[2], PointRCNN[3] 获得检测框位置, 然后再使用目标在多帧数据中的时空联系性进行关联, 获得跟踪结果. 代表方法包括SORT (Simple online and real time tracking)[4]、Deep-SORT (SORT with a deep association metric)[5]和AB3DMOT (A baseline for 3D multi-object tracking)[6]. 其中AB3DMOT将2D多目标跟踪问题扩展到3D多目标跟踪任务, 提出了一种简洁高效的实时多目标跟踪框架, 并在KITTI数据集上验证了出色效果, 实时性达到了200帧/s, 是3D多目标跟踪领域的经典之作.本文在分析AB3DMOT跟踪算法的基础上,针对原算法中的以下两点问题进行了研究: 1) 目标关联度计算在基于检测的跟踪方法中起到了突出作用, 原AB3DMOT算法使用传统的交并比 (Inter-section over union, IoU) 作为度量指标, 因此存在当两个检测框不相交时IoU = 0的问题[7−8], 造成匹配失败; 2) 目前的MOT算法中大多都会用到生存周期 (Birth and death memory, BDM) 策略, 用于降低漏检率、获得更好的跟踪效果, 但多采用固定生存周期, 对所有目标进行无差别处理, 并未考虑检测结果本身置信度对跟踪的影响. 针对上述问题,本文提出了一种基于边界交并比 (Border intersec-tion over union, BIoU) 度量的自适应多目标跟踪算法, 主要创新点包括:1) 提出了BIoU度量方法用于计算检测结果的关联性矩阵, 相比于单一使用欧氏距离或传统IoU 度量的方法, BIoU可以有效解决无交集和奇点问题, 获得更可靠的多目标跟踪结果;2) 提出了一种自适应的生存周期管理策略, 将检测结果本身的置信度与生存周期关联起来, 可以有效避免由于遮挡导致的跟踪失败和由于误检导致的错误跟踪的情况.基于KITTI多目标跟踪数据集[9]进行的实验表明, 本文提出的基于BIoU和自适应生存周期管理的多目标跟踪算法, 相比于原算法可以有效地提高跟踪的准确性和鲁棒性.1 研究现状1.1 2D/3D多目标跟踪任务多目标跟踪问题按照跟踪目标的状态种类可以分为2D多目标跟踪和3D多目标跟踪. 其中2D多目标跟踪主要用于图像领域的目标跟踪任务, 如安防监控、军事侦察、自然观测等领域[10]. DeepSORT[5]算法引入马氏距离度量和级联匹配用于提高跟踪精度. Leal-Taixé 等[11]介绍了一种两阶段深度学习跟踪算法: 使用局部时空编码聚合像素和光流信息,通过梯度增强分类器将图像上下文特征与CNN输出相结合. 孟琭等[12]详细说明了光流法、相关滤波法和深度学习方法在目标跟踪领域的应用效果. 与2D多目标跟踪相比, 基于点云数据的3D多目标跟踪具有较为准确的深度估计, 此类方法大多基于运动学模型. Azim等[13]利用卡尔曼滤波器对获得的相邻两帧激光点云基于八叉树的占据栅格地图分析其不一致信息, 从而检测动态物体; 再使用全局最近邻的方法进行数据关联; 最后基于卡尔曼滤波跟踪动态物体的中心点. Song等[14]采用一种多任务的稀疏学习算法来选取最佳的候补对象, 提高了复杂环境下的跟踪效果. 为了验证有效的深度估计对目标跟踪性能的影响, Sharma等[15]使用基于3D 点云校准的2D图像进行目标跟踪, 考虑了三维空间信息, 有效缓解了基于RGB图像中的深度估计不准确和遮挡问题, 实现了较好的跟踪效果. 2020年, Weng等[6]将2D跟踪算法SORT的思想迁移到3D点云中, 提出AB3DMOT算法, 无需GPU训练即可实现优秀的跟踪性能.1.2 关联度量目标匹配是多目标跟踪中的重要环节, 有效度量预测目标与检测目标之间的关联性, 是获得可靠匹配结果的关键. 常用的匹配方法包括基于外观显著性特征的匹配方法[16−17]和基于空间位置相关性的匹配方法[18−19]. 与2D图像相比, 3D点云数据更为稀疏, 外观特征不明显, 因此更常采用空间位置的相关性进行匹配. IoU和目标间距离是常用的两种度量方法. SORT[4]和AB3DMOT[6]算法中均使用预测框与检测框的IoU值作为关联度量, 再利用匈牙利算法进行匹配. 使用原始IoU进行关联度量存在两个问题: 1) 当预测框与检测框无交集时IoU = 0,此时无法获得有效的度量信息; 2) 多个预测框可能与检测框具有相同的IoU值, 如图1(a)中的情况.另一种方法是使用目标间距离作为度量指标, 如预测框与检测框中心点之间的欧氏距离[19]. 但使用距离度量同样存在不同的预测框与目标框的距离相同的情况. 如图1(b), 虽然蓝色和红色表示的两个预测框差异很大, 但它们与检测框中心的欧氏距离是相同的. 近年来, 使用深度网络来学习目标关联性2074自 动 化 学 报49 卷特征的方法也得到了诸多研究, 如Wu 等[18] 将Point-RCNN 检测器得到的特征也作为关联度量的要素加入度量过程, 从而获得更可靠的度量结果.1.3 生存周期管理在现有的多目标跟踪算法中, 会使用生存周期管理策略[5−6, 18]. 一方面, 当出现因为遮挡造成的目标丢失情况时, 生存周期管理策略可以保证在一段时间内仍然可以持续跟踪目标而不会立刻丢失; 另一方面, 当出现误检情况时, 由于生存周期管理策略要求目标连续检测多帧, 所以可以有效过滤掉单帧误检的目标. 目前通常使用的是固定周期的管理策略, 即对所有目标进行相同时长跟踪用于确定目标或删除目标. 而在实际应用中, 考虑到目标检测单元会输出检测框的置信度, 用于表征检测结果的可靠性, 因此, 可以根据置信度对不同目标进行自适应生存周期管理, 即: 对置信度较高的目标可以保持更长时间以解决遮挡造成的目标漏检; 对置信度较低的目标在发生误检后应尽快删除.2 基于BIoU 的3D 多目标跟踪2.1 问题描述z z 多目标跟踪的主要任务是在给定一个图像序列的前提下, 找到图像序列中待检测目标, 并将不同帧中检测到的目标进行关联, 得到目标的运动信息,给每一个运动目标一个固定准确的ID 标号. 对于3D 目标检测, 一方面其天然克服了基于RGB 图像中的2D 目标检测的遮挡与目标位置估计不准确的问题, 使得基于运动估计的在线跟踪算法易于应用;另一方面, 对于3D 目标检测的点云数据而言, 缺乏类似RGB 图像那样丰富的语义特征, 导致难以使用特征描述的方式进行跟踪. 因此, AB3DMOT [6]算法仅使用简单朴素的跟踪策略就实现了高效实时的目标跟踪效果. 但是, 该方法在匈牙利匹配环节中使用原始的3D IoU 作为成本度量, 而无人驾驶汽车的多目标跟踪本质仍然是一种近似的2D 平面运动, 其在 轴方向上变化较小, 导致目标检测在 轴方向上的估计将对跟踪性能产生较大影响, 同时由于IoU 度量的局限性, 本文提出BIoU 作为一种新的成本度量融入到匈牙利匹配之中. 目标的生存周期管理是目标跟踪的重要环节, 生存周期设置过短在目标检测不稳定时会造成较为频繁的ID 切换,生存周期过长容易增加错误跟踪和目标误检. 因此,通过对跟踪轨迹的置信度打分, 本文设计了自适应的生存周期管理机制, 动态地调整目标的生存周期减少了ID 切换和目标误检, 实现了较好的跟踪性能.如图2所示, 本文所提出的3D 多目标跟踪的整体流程可以分为以下几个部分:1) 使用3D 检测器获得目标检测框;2) 使用3D 卡尔曼滤波器获得上一帧的目标预测框;3) 基于BIoU 计算检测框与预测框的关联度,使用匈牙利匹配算法获得最优匹配结果;4) 使用3D 卡尔曼滤波对所有匹配目标进行状态更新;5) 对未匹配成功的目标进行生存周期管理;6) 输出具有唯一ID 标号的目标边框.2.2 卡尔曼滤波卡尔曼滤波[20]是目前状态估计应用最为广泛的估计优化算法, 它能够根据过去的信号信息, 利用统计计算的原理, 优化最小均方误差, 从而预测出未来的状态量. 卡尔曼滤波是对时间参数估计的yyx(a) 不同预测框和检测框具有相同 IoU(a) Different predicted boxes have same IoUs withthe detected box(b) 不同预测框和检测框具有相同欧氏距离(b) Different predicted boxes have same Euclideandistances with the detected boxxOO检测框检测框2预测框2预测框1预测框1预测框图 1 IoU 度量和欧氏距离度量失效情况Fig. 1 Invalid cases about IoU metrics andEuclidean distance metrics10 期熊珍凯等: 基于激光雷达的无人驾驶3D 多目标跟踪2075最小二乘逼近, 能够建立起状态变量随时间变化的方程, 从而估计出今后某个时刻的状态.卡尔曼滤波算法的核心包括如下几个方程:1) 描述预测过程中, 系统的状态向量预测方程A B U kk ˆXk k X k −1k −1W k −1k −1其中, 为状态转移矩阵, 为控制输入矩阵, 表示 时刻的控制输入向量, 表示 时刻状态的预测值, 表示 时刻的状态输出值, 为 时刻的状态转移过程中的随机干扰噪声, 表现为均值为零的高斯白噪声.2) 描述先验估计协方差矩阵的更新过程Q W k ˆPk k 其中, 为状态转移过程噪声 的协方差矩阵, 为时刻的先验估计协方差矩阵的预测值.3) 描述观测模型中由系统观测值得到系统观测向量的过程H Z k k V k 其中, 为状态观测矩阵, 为 时刻状态变量的观测值, 为状态观测过程中的随机干扰噪声向量, 表现为均值为零的高斯白噪声.4) 卡尔曼滤波增益方程 (权重)K k k R V k 其中, 表示 时刻的卡尔曼增益, 为观测噪声 的协方差矩阵.k 5) 卡尔曼滤波估计方程 ( 时刻的最优状态估计)X k k 其中, 表示 时刻状态向量经过卡尔曼滤波后的最优估计, 是系统的实际输出值, 表现为在预测值的基础上按照卡尔曼滤波增益叠加一个预测误差项.k 6) 卡尔曼滤波协方差估计方程( 时刻的最优协方差估计)P k k 其中, 为 时刻卡尔曼滤波的后验估计协方差矩阵的预测值. 该方程用来描述状态向量协方差矩阵的变化过程, 正是这种不断更新的机制才能保证卡尔曼滤波不断克服随机噪声的影响.卡尔曼滤波算法能够在不准确的测量数据基础上尽可能地消除噪声的影响, 对真实值做出预测. 目标跟踪算法把跟踪目标的属性作为状态变量, 利用卡尔曼滤波器对属性进行线性滤波, 得到更好的预测值.2.2.1 状态预测为了预测上一帧到当前帧的目标状态, 这里使用恒定速度模型估计对象间的帧间位移, 将目标状态表示成一个11维向量, 即x y z l wh θs v x v y v z x y z 其中, , 和 分别表示目标的中心点坐标, , 和 分别表示目标的3D 边框尺度, 为目标边框的航向角, 表示当前轨迹的置信度分数, , 和 分别为目标在三维空间中沿 , 和 轴方向上的运动速度.k −1第 帧数据中的所有目标状态构成的集合表示为ξik −1k−1i m k −1k −1k −1k 其中, 表示在 时刻的第 个目标状态, 表示在 时刻存在的目标数量. 通过 时刻的目标状态, 根据恒定速度模型可以估计出第 帧的目标状态. 目标的预测位置为k −1ξik −1k ξik 对于 时刻的每个目标状态 都可以给出 时刻的预测状态 .新出现的轨迹与目标丢失的轨迹完成匹配的目标预测目标基于 BIoU 度量的目标关联自适应生存周期管理具有唯一ID 的目标检测目标匹配失败的跟踪目标轨迹关联原始点云3D 目标检测3D 卡尔曼滤波T kT k − 1匹配失败的检测目标图 2 基于BIoU 和自适应生存周期的3D 多目标跟踪Fig. 2 3D multi-object tracking based on BIoU and adaptive birth and death memory2076自 动 化 学 报49 卷2.2.2 状态更新根据数据关联的结果, 可以将跟踪目标与检测目标分为4类: 跟踪匹配成功、检测匹配成功、跟踪匹配失败和检测匹配失败. 它们各自的具体形式为T match D match w k T unmatch D unmatch m k −1n k D match 其中, 和 表示匹配成功的跟踪目标与检测目标, 表示当前时刻匹配成功的数量,和 分别表示匹配失败的跟踪目标和检测目标, 表示上一时刻的所有跟踪目标数量, 表示当前时刻的检测目标数量. 完成匹配之后, 使用匹配成功的目标 根据贝叶斯规则更新对应的目标状态.2.3 基于BIoU 的匈牙利匹配算法为了解决传统IoU 度量或距离度量的失效问题, 本文设计了一种结合欧氏距离与IoU 的综合度量指标, 即BIoU 度量, 它由原始IoU 和边界距离惩罚项共同组成, 具体形式为IoU (B 1,B 2)R BIoU γp lt 1,p rb 1,p lt 2,p rb 2ρ(·)C max (B 1,B 2)IoU (B 1,B 2)ρ(p lt 1,p lt 2)ρ(p rb 1,p rb 2)C max (B 1,B 2)其中, 表示一般意义下的两个边界框的交并比, 为基于边界欧氏距离的惩罚项, 是惩罚项因子, 分别表示两个边界框最小外接框的左上顶点和右下顶点, 函数 为两个顶点间的欧氏距离, 表示两个边界框最小外接框的最大对角线距离, 用于对边界距离进行归一化处理. 需要说明的是, 采用最小外接框的方法可以弱化旋转对边界距离的影响, 便于计算边界距离.图3(a)展示了2D BIoU 的计算方法. 绿色和蓝色实线框代表两个不同的边界框, 虚线框为它们各自的最小外接框, 灰色区域表示 ,红色线段表示边界距离 和 ,黄色线段表示最大对角线距离 .对于3D 多目标跟踪, 本文将上述2D BIoU 的定义扩展到3D 坐标系下, 如图3(b)所示. 3D BIoU 的计算式为IoU 3D (V 1,V 2)V 1V 2R BIoU 3D p lft 1,p lft 2,p rrb 1,p rrb 2ρ(p lft 1,p lft 2)ρ(p rrb 1,p rrb 2)C max (V 1,V 2)BIoU thres BIoU 3D <BIoU thres 其中, 表示两个3D 边界框 和 的体积交并比 (图中的灰色区域), 惩罚项 与边界距离相关, 分别是两个3D 边界框最小外接框的左−前−上顶点和右−后−下顶点, 和 分别是对应边界距离 (图中的红色线段), 则表示两个最小外接框所有顶点间的最大对角线距离 (图中的黄色线段). 在给定阈值 的情况下, 当 时,则认为两个3D 边界框匹配失败, 即两个3D 边界框分别属于独立的两个不同目标.2.4 自适应生存周期管理策略F min F max 在多目标跟踪中, 现有目标会离开视野, 也可能有新目标进入视野, 因此需要一个模块来管理轨迹的产生和删除. 生存周期管理是常见的做法: 将所有未成功匹配的检测目标视为潜在的新轨迹, 为了避免跟踪误报, 只有在该目标连续检测到 帧后才认为是一个新的目标轨迹; 将所有未成功匹配的跟踪目标结果视为即将离开视野的轨迹, 为了避免误删轨迹, 只有该目标未成功匹配 帧后才视为目标丢失并将其删除. 理想情况下, 该策略可以保留因为单帧漏检未能成功匹配的目标轨迹, 并仅删除已经离开视野的目标轨迹. 但在实际中, 3D 目p lft 1p lt 1p lt 2p lft 2p rrb 1p rrb 2p rb 1p rb 2m a x (V 1, V 2)ma x(B1, B 2)IoU 3D (V 1, V 2 )IoU (B 1, B 2 )V 2B 2B 1V 1r (p rrb 1, p rrb 2)r (pr b1, pr b2)r (p l f t 1, p l f t 2)r (pl t 1, pl t 2)(a) 2D 边界交并比(a) 2D BIoU (b) 3D 边界交并比(b) 3D BIoU图 3 边界交并比示意图Fig. 3 Schematic diagram of BIoU10 期熊珍凯等: 基于激光雷达的无人驾驶3D 多目标跟踪2077标检测器的误检和漏检普遍存在, 采用固定的生存周期管理策略, 将出现错误的跟踪轨迹. 原因主要是固定的生存周期管理策略未有效利用检测目标的置信度信息, 而对所有目标均进行相同周期的检查操作, 从而导致检测置信度较低的目标 (往往为误检目标) 也需要跟踪多帧后才会被删除, 而检测置信度较高的目标一旦被多帧遮挡 (往往出现漏检)也可能被删除.因此, 本文提出一种自适应生存周期管理策略,根据目标检测结果的置信度, 动态调整最大生存周期, 具体为score αβσ(·)F max F Amax αβF max =3,α=0.5,β=−5其中, 为当前目标的检测置信度, 和 为尺度系数和偏移系数, 表示Sigmoid 非线性函数, 为最大生存周期, 为根据目标检测置信度计算后的生存周期. 通过选取合适的 和 , 实现更好的跟踪效果. 图4给出了当 时生存周期与检测置信度之间的关系. 利用Sig-moid 函数的S 型曲线特性, 检测目标的置信度越高, 该目标的生存周期将会越长, 从而实现生存周期动态调整.32F A m a x10010置信度−102030图 4 自适应生存周期Fig. 4 Adaptive birth and death memory3 实验结果与分析3.1 数据集与评价指标介绍本实验基于KITTI 数据集的多目标跟踪基准进行评估, 该基准由21个训练序列和29个测试序列组成. 对于每个序列都提供了LiDAR 点云、RGB 图像以及校准文件. 用于训练和测试的数据帧数分别为8 008和11 095. 对于测试集数据, KITTI 不向用户提供任何标签, 而是在服务器上保留标签以进行MOT 评估. 对于训练集数据, 含有30 601个目标和636条轨迹, 同样包括Car 、Pedestrian 和Cyclist 类别. 由于本文使用的目标跟踪系统是基于卡尔曼滤波算法的, 不需要进行深度学习训练, 因此将所有21个训练序列作为验证集进行验证. 实验对比了Car 、Pedestrian 和Cyclist 全部3个类别上的多目标跟踪效果.对于多目标跟踪方法, 理想的评价指标应当能够同时满足3个要求: 1) 所有出现的目标都能够及时被发现; 2) 找到的目标位置应当尽可能和真实的目标位置一致; 3) 应当保持目标跟踪的一致性, 避免目标标志的频繁切换. 根据上述要求, 传统的多目标跟踪将评价指标设置为以下内容: 多目标跟踪准确度 (Multi-object tracking accuracy, MOTA)用于确定目标的个数以及跟踪过程中的误差累计,多目标跟踪精度 (Multi-object tracking precision,MOTP) 用于衡量目标位置上的精确度, 主要跟踪轨迹命中率 (Mostly tracked, MT), 主要丢失轨迹丢失率 (Mostly lost, ML), 身份切换次数 (ID swit-ch, IDS), 跟踪打断次数 (Fragment, FRAG) 等.3.2 实验结果实验流程如图5所示, 其中3D 目标检测器使用与A B 3D M O T 算法相同的、已经训练好的PointRCNN 模型. 在目标匹配阶段, 使用本文提出的BIoU 计算预测框与目标框之间的关联度, 然后使用匈牙利匹配算法进行目标匹配. 成功匹配的目标送入卡尔曼滤波器进行状态更新, 未成功匹配的检测目标和预测目标均送入自适应周期管理模块进行判定. 自适应周期管理模块根据目标的置信度分数自适应调整目标的最大生存周期, 删除已达到最大生存周期而仍未匹配成功的目标, 最终得出具备唯一ID 标号的目标轨迹. BIoU 和自适应生存周期管理中涉及的参数通过整定得到, 最终模型使用的参数如表1所示.为了验证本文所提出的基于BIoU 度量和自适应生存周期管理多目标跟踪算法的性能, 本文与基准AB3DMOT 算法在KITTI 多目标跟踪数据集的3类目标上进行了对比; 同时在Car 类别上还与另外两种端到端的深度学习算法FANTrack [21] 和DiTNet [22] 进行了比较. 实验结果如表2所示.表2的结果表明, 本文提出的基于BIoU 度量和自适应生存周期管理策略的多目标跟踪算法相比于基准算法在3类目标上均获得了更高的MT 值,意味着本文算法在对目标的长时间跟踪性能上明显优于基准算法; 在Pedestrian 和Cyclist 两个类别上, 跟踪准确度MOTA 较基准算法有显著提升, 而在Car 类别上与基准算法基本一致. 最值得注意的是, 本文算法在命中率MT 和丢失率ML 这两项指标上均有显著提升, 说明了本文算法在长时间稳定2078自 动 化 学 报49 卷跟踪目标这个问题上具有明显优势. 另外, 在Ped-estrian和Cyclist两类目标的跟踪任务上获得更好的效果, 也说明了基于BIoU的目标跟踪可以有效提高对小目标的跟踪性能. 分析其原因, 可以发现小目标更易于出现检测框与预测框交集较少或无交集的情况, 这也正是BIoU相较于传统IoU最大的优点, 即解决IoU相等或IoU = 0时的关联度量问题.图6和图7分别展示在出现误检和漏检情况时, 本文所提出改进跟踪算法和基准算法的跟踪结果. 在图6的第2行中, 两类算法均出现了误检的情况 (用红色圆圈标记), 但相较于基准算法(图6(a)的第1行), 由于引入了自适应生存周期管理,因此在下一帧数据中, 改进跟踪算法及时将误检目标删除, 而基准跟踪算法仍会对误检目标进行持续跟踪, 直到生存周期结束. 上述结果表明基于本文改进的跟踪算法可以明显减小误检目标的生存周期, 降低误检次数.同样, 对于目标漏检的情况, 本文算法也能给出更好的结果. 图7 (a)的第3行中, 由于红色圆圈标记的目标被其他物体遮挡而导致漏检, 在下一帧中, 该目标再次被检测到时, 已被标记为新的目标(这一点从对比图7(a)的第2行和图7(a)的第4行中检测框颜色不一致可以看出). 而使用本文提出的改进算法, 即使在图7(b)的第3行中出现了遮挡,因为生存周期并未结束, 因此目标仍然在持续跟踪, 也未发生身份切换的问题. 这说明, 在由于目标遮挡等问题出现漏检时, 本文提出的改进跟踪算法可以有效克服漏检问题, 保持目标持续跟踪与ID 恒定.3.3 消融实验对比F max=5F maxF AmaxF Amax为了进一步说明BIoU度量和自适应生存周期管理策略的实际效果, 本文在KITTI验证集上进行了消融实验. 为了便于比较, 本文设置最大生存周期; 对于固定生存周期策略, 生存周期即为; 对于自适应生存周期策略, 采用式 (13) 描述的关系自适应计算生存周期. 消融实验的结果如表3所示, 其中不使用BIoU和的跟踪方法即为原始AB3DMOT算法.首先, 对BIoU进行性能分析. 在表3中, 每类目标的第2行数据与第1行相比, 区别在于使用BIoU表 1 模型参数Table 1 Model parameters参数值说明γ0.05BIoU惩罚因子α0.5生存周期尺度系数β4生存周期偏移系数F max3 (Car)5 (Others)最大生存周期对Car目标为3对其他类别目标为5F min3目标轨迹的最小跟踪周期该值与AB3DMOT相同BIoU thres−0.01BIoU阈值小于阈值认为匹配失败具有唯一 ID 标号的跟踪结果跟踪结果自适应生存周期管理基于 BIoU 的目标匹配卡尔曼滤波器匹配失败检测目标检测目标3D 目标检测网络匹配失败预测目标预测目标匹配目标上一时刻轨迹当前时刻轨迹轨迹关联新加入轨迹与需要丢弃轨迹32FAmax1010置信度−102030p ltp ltB21X^k = AX k − 1k −+ BU k + WP^k = AP k − 1A T + QZk= HX k+V kKk= P^k H T(HP^k H T + R)−1Xk= X^k + K k(Z k−HX^k)Pk= (I−K k H)P^k B1d1d2max(B1, B2)p rbp rb图 5 基于激光雷达的3D多目标跟踪整体流程Fig. 5 Overall pipeline for LiDAR-based 3D multi-object tracking10 期熊珍凯等: 基于激光雷达的无人驾驶3D多目标跟踪2079。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三维空间连续系统的目标轨迹预见跟踪控制廖福成,袁晓艳(北京科技大学应用科学学院,北京 100083)摘要:针对连续系统已知的空间目标轨迹,把基于协调误差的空间目标轨迹最优预见跟踪控制的方法应用于连续系统,其核心是将轨迹的协调跟踪误差和轨迹的位置跟踪误差考虑成系统的状态变量,并实施最优反馈控制。
仿真分析表明,该轨迹跟踪控制方法能够有效提高系统的轨迹跟踪控制精度。
关键词:协调误差;最优控制;跟踪控制;预见控制中图分类号:TP273.1Preview Tracking Control of Object Trajectory about Continuoussystem Based On Harmony ErrorAbstract: Aim at known space object trajectory of a Continuous system, a new preview control scheme, named optimal preview tracking control of space object trajectory based on harmony error is proposed. The highlight of the method is that harmony error and position error of tracking trajectory is put into system space state equation,which to improve the system control accuracy. The simulation result shows that the method above is valid for improving the performance of high accuracy trajectory control.Key words: harmony error ,optimal control,tracking control,preview control在离散系统的跟踪控制中,引入已知未来目标信息可以改善系统对目标信号的跟踪性能,它对解决目标轨迹跟踪运动性能起到了良好的作用。
见文[1-3]。
但是,已往最优预见控制都是研究的离散系统,而对连续系统的研究却很少,三维空间目标轨迹跟踪控制研究的也是离散系统,而连续系统又有自己的有点。
因此本文主要讨论了基于协调误差的三维空间连续系统的目标轨迹预见跟踪控制,主要也是同时考虑轨迹跟踪协调误差和位置协调误差的轨迹跟踪最优预见控制方法,即将系统对已知空间目标轨迹的跟踪协调误差和位置协调误差同时作为其状态变量,实施其反馈最优预见控制,从而可有效提高系统对空间目标轨迹的跟踪运动性能。
1 跟踪控制系统的构成设在空间坐标系中连续时间系统的方程为:()()()()(),,,i i i i ii i ix t A x t B u ty t C x t i x y z=+⎧⎨==⎩(1)其中:()nix t R∈是状态向量,()iy t R∈是输出,()miu t R∈是控制输入向量,,,i i iA B C分别是,,1n n n m n⨯⨯⨯维的常数矩阵。
设目标值向量为()r t,()r t是分段连续可微的函数向量,并设从当前时刻t起()rτ()t t lτ≤≤+是可预见的,()r t在,,X Y Z轴上的分量为(),(),()x y zr t r t r t即:()()()()x y z r t r t r t r t ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦0000,00xy z A A A A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦000000xy z B B B B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦0000,0x y z C C C C ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦()()()()x y z x t x t x t x t ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦()()()()x y z y t y t y t y t ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,()()()()x y z u t u t u t u t ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦则就有方程:()()()()()xt Ax t Bu t y t Cx t =+⎧⎨=⎩ (2) 把目标值向量函数()r t 与系统输出()y t 之间的差定义为系统的位置误差:()()()()()()()()()()x x x y y y z z z e t r t y t e t e t r t y t e t r t y t ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦()()r t y t =- 则:()()()()()x x x x x x et r t y t r t C x t =-=- ()()()()()y y y y y y et r t y t r t C x t =-=- ()()()()()z z z z z z et r t y t r t C x t =-=- 本文做如下定义:定义1 三维空间坐标系中的位置协调系数为:12()()(),()()()x x y z r t r t n t n t r t r t == 12(),()n t n t 称为X 与Y 轴,X 与Z 轴的位置协调系数。
所以就有: 12()()()0,()()()0x y x z r t n t r t r t n t r t -=-=定义2 三维空间坐标系中连续系统的协调跟踪误差如下:11()()()()x y e t y t n t y t =-11()()()()()()x y x y y t n t y t r t n t r t =--+ 1()()()xye t n t e t =-+22()()()()x z e t y t n t y t =-22()()()()()()x z x z y t n t y t r t n t r t =--+ 2()()()x z e t n t e t =-+那么111()()()()()()x y y et e t n t e t n t e t =-++ 1()()()()x x x y rt C x t n t e t =-++ 1()(()())y y y n t rt C x t +- 1()()()()x x x y rt C x t n t e t =-++ 11()()()()y y y n t rt n t C x t +- 同理222()()()()()()x z z et e t n t e t n t e t =-++ 2()()()()x x x z rt C x t n t e t =-++2()(()())z z z n t rt C x t +- 2()()()()x x x z rt C x t n t e t =-++ 22()()()()z z z n t rt n t C x t +- 由(2)式得到:()()()dx t Ax t Bu t dt=+ 引入新的状态变量:1()[()()()()x y z z t e t e t e t e t =2()()()()]T T T Tx y z e t x t x t x t那么就有:()()()()()()r zt A t z t Bu t G t r t =++ (3) 其中:10()0C A t NC A ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,1(),0r I G t N ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦0B B ⎡⎤=⎢⎥⎣⎦ 120()00000()00nt N n t ⎡⎤=⎢⎥⎣⎦ 112()0()x yxz C n t C C C n t C -⎡⎤=⎢⎥-⎣⎦1121()010()n t N n t -⎡⎤=⎢⎥-⎣⎦ ()()()()TT T T x y z u t u t u t u t ⎡⎤=⎣⎦ ,()()()()Tx y z r t r t r t r t ⎡⎤=⎣⎦2 轨迹跟踪最优预见控制算法对系统(3)取二次型性能指标函数:1[()()()()]2f t T Tt J z t Qz t u t Ru t dt =+⎰ (4)其中0t 是初始时刻,f t 是末端时间,0,0Q R ≥>。
通过在二次型性能指标函数中引入输入的导数()ut 可以有助于消除静态误差。
显然,式(4)是考虑轨迹协调跟踪误差和位置跟踪误差的最优控制问题。
下面求出系统(3)在性能指标函数(4)下的最优控制输入。
定理1 系统(3)在性能指标函数(4)下的最优控制输入为:11()()()()T Tut R B P t z t R B g t --=-- 其中()P t 为 n n ⨯阶矩阵,满足Riccati 微分方程:()()()()()T Pt A t P t P t A t -=+ 1()()T P t BR B P t Q --+终端条件为: ()0f P t =()()exp()()()()rl t Crtsg t A u du P s G s r s ds=-⎰⎰ 其中:1min(,),()()()T T r f C l t t l A t P t BR B A t -=+=- 证:根据最小值原理,构造Hamilton 函数:11((),(),(),)()()()()22T TH z t ut r t t z t Qz t ut Qu t =+ ()[()()()()()]Tr t A t z t But G t r t λ+++ 则有正则方程:()Ht zλ∂=-∂ 控制方程:0Hu∂=∂ 状态方程:()()()()()()r zt A t z t Bu t G t r t =++ 边界条件:00(),()0f z t z t λ==由以上方程可以得到:100()()()()()()()()()()()()(),()0r TTf z t A t z t But G t r t t Qz t A t t u t R B t z t z t λλλλ-⎧=++⎪=--⎪⎨=-⎪⎪==⎩(5) 消去()ut 得到: 1()()()()()()()()()()T r Tz t A t z t BR B t G t rt t Qz t A t t λλλ-⎧=-+⎨=--⎩ (6) 现从(6)中解出()t λ,(6)又可写为:1()()()()()()T T zt z t A t BR B t t Q A t λλ-⎡⎤-⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦ ()()0r G t rt ⎡⎤+⎢⎥⎣⎦由微分方程知识可以得到:0100()()()()z z t t t t λλ-⎡⎤⎡⎤=ΦΦ⎢⎥⎢⎥⎣⎦⎣⎦1()()()()0tr t G s r s t s ds -⎡⎤+ΦΦ⎢⎥⎣⎦⎰ 0000()()()()0t r t z G s rs t t t s ds λ⎡⎤⎡⎤=Φ-+Φ-⎢⎥⎢⎥⎣⎦⎣⎦⎰ 其中:01()()exp ()T t T t A u BR B t du Q A u -⎛⎫⎡⎤-Φ= ⎪⎢⎥ ⎪--⎣⎦⎝⎭⎰ 令:11122122()()()()()t t t t t ΦΦ⎡⎤Φ=⎢⎥ΦΦ⎣⎦则(7)式写为:11012002102200()()()()()()t t t t z z t t t t t t λλΦ-Φ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥Φ-Φ-⎣⎦⎣⎦⎣⎦011122122()()()()()()0t r t t s t s G s rs ds t s t s Φ-Φ-⎡⎤⎡⎤+⎢⎥⎢⎥Φ-Φ-⎣⎦⎣⎦⎰ 所以1100120021002200()()()()()()t t z t t z t t t z t t t λλλΦ-+Φ-⎡⎤⎡⎤=⎢⎥⎢⎥Φ-+Φ-⎣⎦⎣⎦01121()()()()()()tr t r t s G s rs ds t s G s r s Φ-⎡⎤+⎢⎥Φ-⎣⎦⎰ 把0t 换成t ,t 换成f t11122122()()()()()()()()()()f f f f f f z t t t z t t t t t t t z t t t t λλλΦ-+Φ-⎡⎤⎡⎤=⎢⎥⎢⎥Φ-+Φ-⎣⎦⎣⎦1121()()()()()()ft f r tf r t s G s rs ds t s G s r s Φ-⎡⎤+⎢⎥Φ-⎣⎦⎰所以有:2122()()()()()f f f t t t z t t t t λλ=Φ-+Φ-21()()()ft f r t t s G s rs ds +Φ-⎰ 可以看到()t λ具有如下的形式:()()()()t P t z t g t λ=+ (8) 容易得到:()0,()0f f g t P t == 把(8)式代入(5)式的第三式得到:111()()()()T T T ut R B t R B z t R B g t λ---=-=-- (9)把(9)式代入(3)式得到:1()(()())()T zt A t BR B P t z t -=-1()()()T r BR B g t G t r t --+ (10)再由(5)的第二式得到:()()()()T t Qz t A t t λλ=--()()(()()())TQz t A t P t z t g t =--+ [()()]()()()T T Q A t P t z t A t g t =-+-由(8)式得:()()()()()()t P t z t P t z t g t λ=++ 所以就有:()()()()()P t zt P t z t g t ++ [()()]()()()T T Q A t P t z t A t g t =-+-把(10)式代入上式得:[()()()()()T Pt A t P t P t A t ++ 1()()]()TP t BR B P t Q z t --+ 1[()()()T gt P t BR B g t -+- ()()()()()]0Tr P t G t rt A t g t ++= 上式是()z t 的恒等式,所以有:()()()()()T Pt A t P t P t A t -=+ 1()()TP t BR B P t Q --+ 1()()()T gt P t BR B g t -= ()()()()()T r P t G t rt A t g t -- 1[()()]()T T P t BR B A t g t -=- ()()()r P t G t rt - ()()()()()C r A t g t P t G t rt =- (11) 其中:1()()()TTC A t P t BR B A t -=- 由于方程(11)的解为:()0()exp()()t Ct g t A s ds g t =⎰()0exp()()()()tt Crt sA u du P s G s r s ds-⎰⎰将0t 换成t ,t 换成f t 就有:()()exp ()()ft f C tg t A s ds g t =⎰()exp()()()()fft t C r t sA u du P s G s rs ds -⎰⎰由于()0f g t = 所以()()exp ()ft C tg t A s ds =--⎰()exp()()()()fft t C rt sA u du P s G s r s ds⨯⎰⎰ ()exp ()()()()ft t CrtsA u du P s G s rs ds =-⎰⎰ ()exp ()()()()t lt CrtsA u du P s G s rs ds +=-⎰⎰定理1得证。