万能协议转换器驱动驱动程序列表
红狮Crimson 2系列G3 HMI操作手册说明书

G3系列HMI,图片小于实际尺寸。
web和网络支持多种不同类型的硬件。
可、驱最简洁、最灵活的软件,请访问了解我们的全线HMI产品(HMi)B操作界面 – H M I板上的以太网端口公开各类数据,允许对诊断信息或者数据记录器记录的值进行远程访问。
CompactFlash (CF 卡)帮助实现几乎无限的数据存储能力集成CF 卡插槽可以插接便宜、常见的I 类和II 类CompactFlash 卡,让您能够轻松地收集、保留以及传输数据。
如需更新已在客户处安装的设备内部的数据库,您可以通过Crimson 将该数据库的副本保存到CompactFlash 卡中,把该卡交付给客户,然后让G3从该卡中加载数据库。
USB 端口让数据传输与下载 更加快捷G3 HMI 系列有一个方便的USB 端口,可用于从PC 中快速下载配置文件,还可用于将趋势和数据记录快速上传到PC 中进行分析。
强大的处理能力G3 HMI 系列配备板载32位处理器,拥有无与伦比的计算能力。
功能齐全的Crimson 软件包含内置的“C ”编译器,可用于为复杂应用、配方处理、实时计划、数学表达式求值等等创建自定义程序。
配置与编程更迅捷Crimson 2是强大的基于图标的配置、显示、控制以及数据记录工具集合,它们专为充分利用G3 HMI 系列的架构而设计。
多数简单应用程序可通过分步过程快速设置,以配置通信协议、定义要访问的数据标记以及创建用户界面。
一整套拖放图形项不但简化了界面的创建,而且能够产生专业效果。
编程、数据记录和配置G3的web 服务器等更多高级功能既直观又容易启用。
价格最低的全功能HMI只需比许多精简版HMI 更低的价钱,您就可以增加只有G3 HMI 系列才提供的强大功能和易性。
G3系列标配有三个串行通信端口、以太网、协议转换器、USB 和CF 卡插槽。
并且,无需支付额外费用,您就可以获得功能齐全的Crimson 2软件,它包含拖放配置和数据标识功能、易用的界面工具、灵活的编程环境、强大的数据记录功能以及我们独有的虚拟面板和用于远程访问与控制的web 服务器功能。
WDM驱动

Windows驱动开发模型WDM学习笔记绪言 (4)1.WDM驱动程序开发基础知识 (5)1.1WDM简介:Win32 Driver Model Win32驱动程序模型 (5)1.2 Win32 API (5)1.3 WDM特性 (5)1.4 WDM工作原理 (6)1.5 WDM与其它驱动程序的比较 (6)2.WDM驱动程序开发环境DDK设备驱动程序开发包 (6)2.1■安装DDK (6)2.1.1.Windows 98 DDK的安装 (7)2.1.2.Windows 95 DDK的安装 (7)2.1.3.NT DDK的安装 (8)2.2 ■构造环境:建立WDM驱动程序构造环境的方法 (8)2.2.1. 用SETENV.bat来安装驱动程序构造环境 (9)2.2.2. 手工运行SETENV.bat (9)2.2.3. 构造WDM驱动程序 (9)2.2.4.构造驱动程序 (9)2.2.5.检查Windows 98 DDK的安装 (9)3.WDM驱动程序的设计与开发 (10)3.1■WDM 驱动程序的运作流程 (10)3.2■驱动程序设计 (10)3.3■驱动程序开发 (11)3.3.l.编写驱动程序框架 (11)3.3.2.测试驱动程序 (11)4.WDM驱动程序编译运行:编译和安装设备驱动程序的方法 (12)4.1■编译设备驱动程序的方法 (12)4.1.1.举例分析 (12)4.1.2.编译的基本步骤 (13)4.2■设备驱动程序的安装和启动 (13)4.2.1.添加注册表中的键值 (13)4.2.2.控制驱动程序的装入次序 (14)4.2.3.驱动程序的Start值 (14)4.2.4.修改注册表的方法 (15)4.2.5.启动设备驱动程序 (15)4.2.6.调试工具 (16)5.wdm驱动开发基础-一些需要注意的问题汇总 (16)5.1注册表的角色 (16)5.2.如何命名注册表键 (16)5.3从用户模式中访问设备键 (17)5.4 函数原型“IN”关键字 (17)5.5 注册设备接口 (18)5.6 初始化设备扩展 (18)5.7 注意侧效 (19)5.8 try-finally中的控制流程 (20)5.9 生成异常 (22)5.10 __Leave语句 (23)5.11 简化页大小 (24)5.12 页故障关于分页 (24)5.13 alloc_text的使用 (25)5.14 关于段布置 (26)5.15 服务函数描述 (26)5.16 ExAllocatePoolWithTag (28)5.17 ExAllocatePool的其它形式 (29)5.18 单链表 (30)5.19 lookaside链表的服务函数 (31)5.20 打开注册表键 (31)5.21 删除子键或键值 (32)5.22 枚举子键或键值 (33)5.23 IRQL限定 (35)5.24 IRQL的明确控制 (35)5.25 自旋锁 (36)6. wdm驱动开发基础代码分析解析 (36)绪言在Windows的不同版本上开发的驱动程序“模型”(模型这个词语应该来源于单词“Mode”。
iFIX众多驱动介绍
iFIX众多驱动介绍P ost By:2009-8-11 12:09:34PLC –AB:iFIX 针对AB PLC 的驱动程序有多种连接方式,现分别说明如下:ABH:使用串行口连接AB DH+ 网络,简单易行,但速度受到串口限制,无需其它AB 软硬件。
驱动程序版本为:6.xABR:现使用较多,可以支持AB 的KT, KTC, KTX, KTXD 以及以太网卡与PLC 通讯,还需要AB 的RSLinx 软件支持。
此软件可从AB 购买或从Intellution 一同订货。
注意,不可使用RSLinx Lit e版本,所需的RSLinx版本是:RSLinx for Windows NT and 95 v2.00.97.30 或以上,OEM 版本也可。
主要支持的PLC 类型有:PLC-2、PLC-3、PLC-5、PLC-5/250、SLC 5、MicroLogix 1761-L10BW A 和1761-L20BWA-5A PLCs 等。
详情请参见驱动程序手册。
需要注意的是ABR I/O 驱动版本6.51 以上才支持MicroLogix PLC。
现场应用:道康宁(Dow Corning)、上海石洞口一厂、上海延安东路隧道ABE:使用较少,通过以太网方式连接AB PLC,但需AB 的Interchange 软件支持。
ABO:第三方OPC Server,可同iFIX 的OPC Client 直接连接。
但也需AB 的RSLinx 支持。
开发方为:Matrikon Systems, Inc。
详情可查阅PLC –Modicon:MB1:有两个版本,6.x 和7.x 版,通过串行口连接所有支持Modbus 串行通讯协议的设备。
主要有Modicon PLC 和其它控制仪表如:Honeywell UDC,UMC,Moore 的控制仪表等。
支持Mobus RT U 和ASCII 两种通讯协议。
当使用其与其它兼容设备通讯时,注意数据类型会与Modicon 的数据类型有所差别。
万能驱动助理(WanDrv)v5.30 新春版【装机必备的万能驱动,新增Win8专版】
一、软件简介【万能驱动助理】概述:万能驱动助理(可简称为WanDrv)IT天空出品的一款根据硬件ID(HWID)来智能识别电脑硬件并且自动安装驱动程序的工具,它拥有简约且友好的用户界面,使用起来十分方便。
追求“万能”是一种态度,表达我们想要将产品做得尽善尽美的理念,也希望我们这个产品能够通过不断完善,让用户切身感受到它的驱动安装方面的“无所不能”。
【万能驱动助理】定位:驱动覆盖面广,智能精准识别硬件设备,是普通电脑用户离线安装电脑硬件驱动的好帮手、装机人员、系统工程师、系统维护人员部署系统的最佳选择。
驱动一键到位,便捷装机首选。
【万能驱动助理】硬件设备支持:万能驱动助理搭载了经过IT天空开发团队精心整理制作的驱动包。
这是到目前为止,我们针对当前主流硬件设备收集和整理得最全面的驱动文件集合,支持市面上的绝大多数的硬件设备(且兼容多数以往的老硬件)。
驱动包经过合理定制和整合,是市面上所见到的体积相近的驱动套装中支持最多硬件设备的。
【万能驱动助理】多语言支持:支持简体中文、繁體(正體)中文以及英文操作系统,不同语言的系统会显示对应语言的用户界面,对于非中文的操作系统,默认显示英文用户界面。
【万能驱动助理】多平台支持:分32位版和64位版,32位版支持Windows 8/7/XP、Server 2003;64位版支持Windows 8/7、Server 2008 R2。
可以说,万能驱动助理是集易用性、准确性、可靠性、高效性和广泛性于一身的硬件驱动智能安装工具。
延伸阅读:e驱动V5的工作原理是什么?它能为我们带来什么方便?(本文有详细介绍,推荐阅读)关于个别杀软报毒:由于软件主程序适用AU3语言开发,万能驱动助理可能会被个别安全软件误报为危险软件,大家请添加万能驱动助理为“可信任软件”,我们的软件绝对不会给用户带来安全威胁,上面链接的文章也有对应说明,烦请还不了解的朋友看看。
二、软件下载地址万能驱动助理v5.30(XP 专版,32位)应用环境:32位(x86)的 Windows XP,兼容支持32位(x86)的 Windows Server 2003 文件: WanDrv_5.30__WinXP_x86.zipMD5: 4FB36F0A89E152BC2537CBCF2DC2D284SHA1: 934EB724A51F0C866097547BB90A9A3F2C8E3692下载地址:(1)百度网盘(2)迅雷快传万能驱动助理v5.30(Win7 专版,32位)应用环境:32位(x86)的Windows 7文件: WanDrv_5.30__Win7_x86.zipMD5: E492B18DBCB7B6BF63ABE927690B3B1FSHA1: C1E63BE488F34FB9179D94FFD88599416FB39460下载地址:(1)百度网盘(2)迅雷快传万能驱动助理v5.30(Win7 专版,64位)应用环境:64位(x64)的Windows 7 和Windows Server 2008 R2文件: WanDrv_5.30__Win7_x64.zipMD5: DA9A818F2342D24E01C0ADF04504BD67SHA1: 5FD5CE5F1C4E33DE39528592E4195DB696E20F0B下载地址:(1)百度网盘(2)迅雷快传万能驱动助理v5.30(Win8专版,32位)应用环境:32位(x86)的Windows 8文件: WanDrv_5.30__Win8_x86.zipMD5: 4634C5A0A239E4EE0788E14F2FD7E2B7SHA1: 28287DFD85DB6AD54E0F5C59ED8CED3021BDC164下载地址:(1)百度网盘(2)迅雷快传万能驱动助理v5.30(Win8 专版,64位)应用环境:64位(x64)的Windows 8文件: WanDrv_5.30__Win8_x64.zipMD5: 3899B380366A27E73A52B2CE77FBA2B0SHA1: C18F0AE1E117A20CF5E7276024466A840597B9A9下载地址:(1)百度网盘(2)迅雷快传注意:(1)在Win7或Win8桌面下运行万能驱动助理,请使用管理员账户,或以管理员身份运行主程序,或关闭UAC(不推荐);(2)下载后注意核对文件校验值(md5或SHA1,如果发现和官方给出的值不匹配,建议重新下载),请各位多多使用,多多反馈;驱动数字签名认证问题:万能驱动助理内置的驱动包均采用官方原版驱动制作,绝大部分都有WHQL数字签名。
KINCO ED系列伺服驱动器使用手册
基于DS80C320的协议转换器硬件设计
第30卷第3期V ol.30No.3临沂师范学院学报Journal of Linyi Normal University2008年6月Jun.2008基于DS80C320的协议转换器硬件设计史丽萍,陈红,郭燕,李瑞(中国矿业大学信息与电器工程学院,江苏徐州221008)摘要:针对不同厂商的生产设备,由于通信协议不同导致设备之间不能通信的问题,设计了一种由单片机组成的协议转换系统的硬件部分.利用DS80C320单片机的串口通信功能构造了整体硬件框架,设计了协议转换电路,完成设备之间的数据通信,将上海南自协议转换为标准的Modbus协议,来提高系统的广泛性.关键词:通信协议;协议转换;单片机;上海南自协议;Modbus协议;DS80C320中图分类号:TP273文献标识码:A文章编号:1009-6051(2008)03-0112-0051概述随着计算机系统的应用和计算机网络的发展,通信功能显得越来越重要.在计算机与设备的通信中,已经出现了多种协议如CAN总线通信协议、上海南自协议等,即使接口标准、通信协议和通信格式有一个不同,计算机也无法实现与设备的通信.为了解决此问题,需要设计一个协议转换器来顺利完成通信.在目前的工业控制系统中,绝大多数的硬件设备都具有了专门的通信接口,可以和计算机直接通信,但是不同厂商生产的产品通信协议完全不同,如果把各种协议转换为一种标准的通信协议,则可使上位机采集数据和统一管理大为方便,实现此功能可以通过制作协议转换的硬件设备来完成.而当前,工业控制已从单机控制走向集中监控、集散控制,Modbus协议是工业领域最流行的网络应用协议.它已作为一个标准协议应用在各个领域,Modbus协议标准、开放,用户可以免费、放心地使用.另外,Modbus是面向消息的协议,可以支持多种电气接口,如:RS232、RS422、RS485等,还可以在多种介质上传送,如双绞线、光缆、无线射频等.Modbus协议的帧格式是最简单、最紧凑的协议,可以说简单高效、通俗易懂,所以用户使用容易,厂商开发简单.由于其开放性、透明性和低成本等特点,易于开发,已成为当今工业领域通讯协议的首选.本文拟将上海南自协议转换为标准的Modbus协议,来提高系统的广泛性.1.1Modbus协议简介Modbus协议是应用于电子控制器的一种通讯语言.利用这个协议,控制器相互之间(例如485、232C 等)、控制器通过网络(例如以太网)和其他设备之间可以进行通讯.它定义了一种控制器能认识使用的消息结构,而不管它们是通过何种网络实现,描述的是控制器请求访问其它设备的过程.如何回应来自其它设备的请求,以及怎样侦错并记录;制定了消息域格局和内容的公共格式[1].Modbus通讯实现有两种传输模式(ASCII或RTU),在同样的波特率下,RTU比ASCII方式传送更多的数据.一个典型的RTU消息帧如表1所示.使用RTU模式消息发送至少要以3.5个字符时间的停顿间隔开始,在网络波特率多样的情况下,字符时间是最容易实现的.传输的第一个域是设备地址,可以使用的传输字符是十六进制的0–9,A–F.网络设备不断侦测网络总线,包括停顿间隔时间内,当第一个域(地址域)接收到,每个设备都进收稿日期:2008-05-03作者简介:史丽萍(1964–),女,江苏常州人,中国矿业大学教授,博士生导师.研究方向:电力系统自动化.第3期史丽萍,等:基于DS80C320的协议转换器硬件设计113行解码以判断是否发往自己的.在最后一个传输字符之后,一个至少3.5个字符时间的停顿标定了消息的结束.一个新的消息可在此停顿后开始[2].表1RTU消息帧起始位设备地址功能码数据CRC校验结束符T1-T2-T3-T48Bit8Bit N个8Bit16Bit T1-T2-T3-T41.2上海南自协议简介上海南自协议使用五种功能码,其中功能码3完成三种功能、功能码4和功能码16完成两种功能,高字节在前,低字节在后.具体描述如下:功能码1:上传开关量(主机向从机发送的数据见表2)表2主机向从机发送的数据序号12345678单元箱地址0x010x000x000x000x40校验码高位校验码低位Eg.0101000000403d fa功能码3:上传SOE,整定值和录波1.上传SOE(主机向从机发送的数据见表3)表3主机向从机发送的数据序号12345678单元箱地址0x030x000x000x000x0B校验码高位校验码低位Eg.010********B040D2.上传整定值(主机向从机发送的数据见表4)表4主机向从机发送的数据序号12345678单元箱地址0x030x000x001N0x25校验码高位校验码低位Eg.01030090012585AC01030090022585AC3.上传录波值(主机向从机发送的数据见表5)表5主机向从机发送的数据序号12345678单元箱地址0x030x90Lb chn Step0x20校验码高位校验码低位功能码4:标志信息,模拟量,电能脉冲量功能码6:下传复归信号功能码16:下传对时信息和整定值2协议转换器硬件设计方案2.1单片机DS80C320简介114临沂师范学院学报第30卷DALLAS公司的DS80C320单片机是一种可与80C51/80C32兼容的高速微控制器,DS80C320虽然是八位单片机,却具有一般16位单片机的速度,它在普通单片机的基础上为P1口也定义了第二功能,从而拥有6个外部中断、3个定时/计数器,以及4个全双工的串行通信口,同时在指令上与8051兼容.由于采用全新设计的处理器内核,去掉了冗余的时钟和存储周期,在同样的晶振速度下每个相同的指令执行速度可以被提高1.5–3倍,而在使用相同代码编写的程序和同样速度的晶振情况下,程序的执行效率可以典型地提高2.5倍.由DS80C320单片机控制的高速、高精度数据采集系统,可以广泛用于在线数据采集、处理及在线采集离线处理.2.2硬件整体框架单片机是协议转换器的CPU,它负责数据通信、数据打包、数据翻译、数据校验以及命令控制等.本设计使用了DS80C320作为协议转换器的CPU.图1是硬件设计框图,显示了一个协议转换器的整体结构,它由单片机DS80C320、RS-232/RS-485转换器、MAX232芯片、MODBUS通信网关以及电源电路、复位电路等组成.本系统以DS80C320单片机作为中央处理器,MAX232为接口电平转换芯片:把TTL电平转换为RS-232电平.图1硬件框图从总体结构可以看出该系统可分为如下功能模块:(1)系统供电模块.(2)单片机与数据通信系统.(3)系统状态指示模块.(4)串行接口电路.根据系统设计框架,可以初步看出协议转换器在硬件上应该有如下几个组成部分:(1)整个系统是5V直流电源供电.(2)两个串口,实现与设备、上位机相连.(3)串口类型为RS-232标准.(4)为了方便连接,还要有RS-485/RS-232转换器.(5)单片机系统在与上位机相连时,通过MODBUS通信网关连接到以太网上.(6)MAX232芯片是电平转换芯片,在通信过程中,把TTL电平转换为RS-232电平.(7)必须预设一定的RAM存储器保存数据.(8)该系统在单片机内部集成了“看门狗”电路,保证系统正常运行[3].2.2.1系统供电模块系统供电是由外部设备的220V电源经过降压变压器提供的.经过降压以后的电压,先要经过整第3期史丽萍,等:基于DS80C320的协议转换器硬件设计115流电路整流,为了提高系统的稳定性需通过线性稳压器L7805把电压稳定在+5V 对整个系统供电.电源电路如图2所示:图2电源电路系统电源使用的主要器件有:(1)D1,D2,D3,D4为整流二极管.(2)C8、C9为电解电容,C10、C11为一般的瓷片电容,其作用是去耦合.(3)L7805为线性稳压器,它把电压稳定在+5V .(4)D6为发光二极管,它是电源指示灯,当有电源产生时,二极管就会发光.图3状态指示电路2.2.2系统状态指示模块指示电路(图3)由发光二极管来完成,当发光二极管亮的时候,说明系统在工作.该过程是通过在单片机上编程实现的.2.2.3串行接口电路模块串行接口电路(图4)部分器件包括:图4串行接口电路(1)U2,U3为芯片MAX232接口电平转换芯片,将TTL 电平转换为RS-232的电平,或将RS-232电平转换为TTL 的电平.(2)C4,C5,C6,C7为电解电容,与芯片内部的电路组成倍压电路.(3)J1,J2为可全双工工作的通信串口.(4)U2(MAX232)的第11引脚接单片机的TXD0,第9引脚接单片机的RXD0引脚.(5)U3(MAX232)的第11引脚接单片机的TXD1,第12引脚接单片机的RXD1引脚[4].116临沂师范学院学报第30卷(6)RS-232/RS-485转换器:由于现在许多设备都是RS-485接口,因此在RS-232串口前要加一个RS-232/RS-485转换器来连接输入设备.本设计采用的是波士RS-232/RS-485转换器485TC ,它是全双工半双工通用的,无需电源供电,最高速率115.2Kbps .它的基本输入输出框如图5所示:图5转换器框图其中A 、B 端为RS-485差分信号输入端,RX 、TX 引脚分别与RS-232串行口(DB9)的RX 、TX 端相接.波士RS-232/RS-485转换器都可将RS-232通信距离延长至1.2Km 以上(9600bps 时),都可以用于PC 机之间、PC 机与单片机之间构成远程多机通信网络.波士电子是通过了ISO9002质量认证的企业,波士电子的RS-232/485转换器是获得2000国际测控博览会金奖的产品.外形都为DB-9/DB-9转接盒大小,其中DB-9(孔座)一端直接插在9芯RS-232插座(针座)上.RS-485接口是采用平衡驱动器和差分接收器的组合,抗噪声干扰性好.RS-485(或RS-422)通信建议一定要接地线,因为RS-485(或RS-422)通信要求通信双方的地电位差小于1V .即半双工通信接3根线(+A 、–B 、地),全双工通信接5根线(+发、–发、+收、–收、地).为了安全起见,建议通信机器的外壳接大地.光隔转换器所有外接电源的“地”必须全部连在一起,但不要与计算机外壳地相连,因为电源“地”同时也是RS-485或RS-422的信号“地”.当通信距离超过100米时推荐使用光电隔离的通信接口转换器[5].3结论本文设计了协议转换器的硬件组成部分,硬件模块包括系统供电模块、单片机与数据通信系统、系统状态指示模块和串行接口电路模块.设计的单片机系统利用自身的异步串口与设备建立数据通信,可以实现两种不同协议的转换功能,将上海南自协议转换为标准的Modbus 协议.软件部分可以通过C#语言编写.协议转换器利用串口收发中断程序来实现设备和上位机之间的通信.参考文献[1]祝木田,师勇.Modbus 协议通讯的应用[J].微计算机信息,2004,20(6):9–11.[2]张波,张振仁.基于Modbus 协议的C51软件编程[J].电测与仪表,2005,42(8):54–56.[3]苗世洪,刘沛,王少荣,等.智能装置通信协议转换器的设计与实现[J].自动化仪表,2000,21(5):27–28.[4]张国德.串行通讯协议转换系统的设计[J].本溪冶金高等专科学校学报,2003,5(4):35–37.[5]郝鹃,罗志祥.串口通信协议转换器的研制[J].电脑制作与应用,2002,15(1):60–64.The Hardware Designing of Protocol Conversion Based on DS80C320SHI Li-ping,CHEN Hong,GUO Yan ,LI Rui(School of Information and Electrical Engineering,China University of Mining and Technology,Xuzhou Jiangsu 221008,China)Abstract:Aiming at the equipment produced by di fferent manufacturers,the di fference of communication pro-tocol leads to the problem that devices couldn’t communicate with each other.The paper designed the hardware part of protocol conversion system which was composed of single-chip microcomputer system.It constructed the whole hardware frame and designed the circuit of communication protocol by using the interface communication of DS80C320single-chip microcomputer,completing the data communication between di fferent equipment.The design can convert shanghai nanzi protocol into standard Modbus protocol in order to improve the universality of the system.Key words:communication protocol;protocol conversion;single-chip microcomputer;shanghai nanzi proto-col;Modbus protocol;DS80C320责任编辑:张问银。
金鸽科技D222 D223无线物联网M2M DTU Modem说明书

无线物联网M2M DTUModem GSM/SMS/GPRS/3G/4G无线物联网M2M Modem无线数据传输设备DTUD222/D223说明书版本:V1.1型号:D222/D223日期:2020-5-26版权:深圳市金鸽科技有限公司网址:前言感谢您使用深圳市金鸽科技有限公司的D22x系列GSM/短信/GPRS/3G/4G IOT M2M Modem DTU,阅读本产品说明书能让您快速掌握本产品的功能和使用方法。
版权声明本说明书指所有权由深圳市金鸽科技有限公司所有。
未经本公司之书面许可,任何单位和个人无权以任何形式复制、传播和转载本手册之任何部分,否则一切后果由违者自负。
免责声明由于运营商升级网络造成设备无法继续使用的,本公司不能提供免费的升级服务。
由于特殊原因造成运营商网络服务中断时,本将无法正常工作,本公司不承担由此带来的后果。
本产品主要用于基于GSM/短信/GPRS/3G/4G网络的数据传输应用,请按照说明书提供的参数和技术规格使用,同时请注意无线电产品特别是GSM/3G/4G产品使用时应该关注的注意事项,本公司不承担由于不正常使用或不恰当使用本产品造成的财产或人身伤害。
修订记录日期文档版本说明作者2017年04月17日V1.0初版KG字体目录1产品简介 (4)1.1概述 (4)1.2典型应用 (6)1.3安全说明 (7)1.4包装清单 (7)1.5功能特点 (9)1.6技术参数 (10)1.7设备选型 (11)2硬件说明 (12)2.1外形尺寸 (12)2.2LED指示灯 (12)2.3接口定义 (13)2.4SIM卡 (14)2.5电源开关/升级按钮 (14)2.6天线接口 (15)3产品安装 (15)3.1壁挂式 (15)3.2导轨式 (16)4参数配置 (16)4.1配置前准备 (16)4.1.1驱动安装 (16)4.1.2查找端口号 (16)4.1.3登录配置软件 (17)4.2基本信息 (18)4.3号码设置 (23)4.4数据网络设置 (23)4.5串口设置 (25)4.6定时器设置 (26)4.7调试窗口以及调试工具 (26)4.8系统 (27)4.8.1导出配置 (27)4.8.2导入配置 (27)4.8.3初始化/重置 (27)5短信功能 (28)6升级固件 (28)7保修条款 (29)8技术支持 (29)9附录A短信指令集 (29)1产品简介1.1概述GSM GPRS3G4G IoT M2M Modem DTU D223是一款稳定性以及性价比非常高的无线物联网数据传输终端(DTU),利用公用GSM/SMS/GPRS/3G/4G无线网络为用户提供无线长距离稳定可靠的短信以及数据传输功能。
支持NI-OPC的设备和驱动列表
以下列表列出了支持NI-OPC的设备和驱动Table of Contents1.Advanced Simulator OPC Server2.Allen-Bradley OPC Server Suite3.Allen-Bradley Bulletin 900 OPC Server4.Analog Devices OPC Server5.Aromat OPC Server Suite6.AutomationDirect / Koyo EBC OPC Server7.AutomationDirect / Koyo OPC Server Suite8.BUSWARE OPC Server9.Contrex OPC Server Suite10.Cutler-Hammer OPC Server11.Cutler-Hammer ELC OPC Server12.Dataforth isoLynx Driver13.DDE Client Driver14.Fuji Flex OPC Server15.GE Fanuc OPC Server Suite16.GE Focas OPC Server Suite17.Hilscher Universal Driver18.Honeywell OPC Server Suite19.IA Super SEL OPC Server20.Idec OPC Server21.InTouch Client Driver22.IOtech PointScan OPC Server23.Krauss Maffei MC4 Ethernet OPC Server24.Micro-DCI OPC Server25.Mitsubishi OPC Server Suite26.Modicon Modbus OPC Server Suite27.ODBC Client Driver28.Omron OPC Server Suite29.Optimation OptiLogic OPC Server30.Partlow ASCII OPC Server31.Philips OPC Server32.SattBus OPC Servers33.Scanivalve OPC Server34.Siemens OPC Server Suite35.Siemens S7 MPI OPC Server36.Simatic OPC Server Suite37.SIXNET OPC Server Suite38.SquareD OPC Server39.Telemecanique Uni-Telway OPC Server40.Thermo Westronics OPC Server Suite41.TIWAY OPC Server42.Toshiba OPC Server Suite43.Toyopuc OPC Serverser-Configurable Driver (U-CON) OPC Server45.Wago OPC Server46.Yaskawa Memobus Plus OPC Server47.Yaskawa OPC Server Suite48.Yokogawa OPC Server Suite49.Yokogawa Green Series Controller OPC Server50.Yokogawa YS100 OPC ServerAdvanced Simulator OPC ServerAdvanced Simulator OPC Server 支持的设备∙Microsoft Access∙Microsoft SQL∙Oracle∙Sybase注意:Advanced Simulator OPC Sercer能够与仸何支持“ODBC”数据源栺式的应用程序迚行通讯系统需求:MDAC - Microsoft Data Access Components (MDAC 包含多种核心模块,能够提供不同的数据库技术,其中包含 ODBC与其驱动程序)。
万能解码器&协议转换器内容
目录一. 简介............................................................ - 2 -二. 型号............................................................ - 2 -三. 特点............................................................ - 2 -四、功能............................................................ - 2 -五、技术指标........................................................ - 3 -六、系统接线图...................................................... - 3 -6.1 两种不同接口系统连接示意图 .............................................................. - 3 -6.2 总线型布线方式................................................................................. - 4 - 6.3 星型布线方式 .................................................................................... - 4 - 6.4 混合型布线方式................................................................................. - 5 - 七. TC-618C/F万能解码器............................................. - 7 -7.1 万能解码器接线图 ............................................................................. - 7 - 7.3 地址选择开关 .................................................................................... - 8 - 7.4 四线制和六线制镜头接线方式:......................................................... - 9 - 7.5 电源线接口........................................................................................ - 9 - 八、协议转换器TC-6603A ............................................ - 11 -8.1 协议转换器支持协议及拨码选择....................................................... - 13 - 8.2 通讯接口选择 .................................................................................. - 14 - 8.3 自测试功能...................................................................................... - 14 - 九、使用注意事项................................................... - 15 - 附录............................................................. - 16 -一. 简介解码器是监控系统中常用的前端设备,它通过与协议转换器配合使用,可以支持多种协议的硬盘录像和矩阵设备。
万能驱动助理V6手动添加驱动
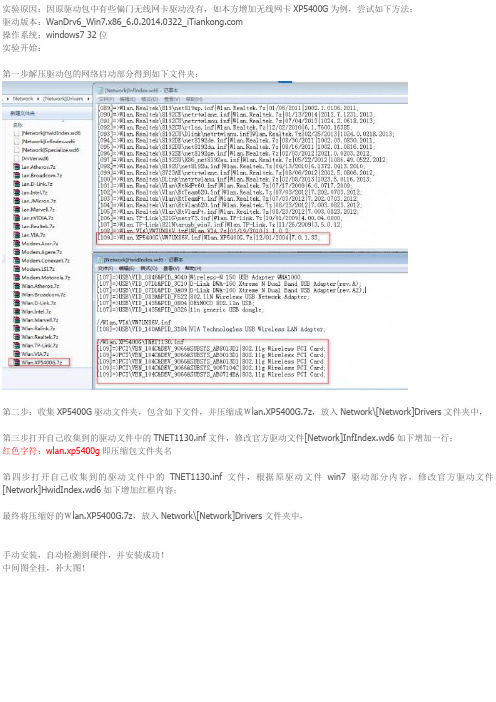
实验原因:因原驱动包中有些偏门无线网卡驱动没有,如本方增加无线网卡XP5400G为例,尝试如下方法;
驱动版本:WanDrv6_Win7.x86_6.0.2014.0322_
操作系统:windows7 32位
实验开始:
第一步解压驱动包的网络启动部分得到如下文件夹:
第二步:收集XP5400G驱动文件夹,包含如下文件,并压缩成Wlan.XP5400G.7z,放入Network\[Network]Drivers文件夹中,
第三步打开自己收集到的驱动文件中的TNET1130.inf文件,修改官方驱动文件[Network]InfIndex.wd6如下增加一行;
红色字符:wlan.xp5400g即压缩包文件夹名
第四步打开自己收集到的驱动文件中的TNET1130.inf文件,根据原驱动文件win7驱动部分内容,修改官方驱动文件[Network]HwidIndex.wd6如下增加红框内容;
最终将压缩好的Wlan.XP5400G.7z,放入Network\[Network]Drivers文件夹中,
手动安装,自动检测到硬件,并安装成功!
中间图全挂,补大图!。
usb万能驱动安装包「usb万能驱动怎么安装」
usb万能驱动安装包「usb万能驱动怎么安装」
怎么使用usb万能驱动 1 下载对应的USB万能驱动包,如USB20设备,就下载USB20万能驱动 2 将下载到的`quotzipquot压缩包解压出来,双击运行里面的quotsetupexequot文件,依提示安装3安装完成后,插入usb的数据线即可正常识。
1进入安装包点击setupexe进行安装2点击安装3提示安装成功后安装完成4右键“我的电脑”,点击属性5点击设备管理器6电脑在连接usb的时候,设备管理器中的USB串口设备会出现COM显示,如果有的话这样就。
软件名称Win7万能USB驱动V30离线版语言简体中文大小867MB 类别系统工具介绍USB是电脑上外接设备必不可少的插口,而USB 驱动没有安装的话则无法识别设备,系统之家小编给大家提供Win7万能USB驱动离线版下载安装。
随便解压到一个文件夹里,等你插入U盘的时候提示找到新硬件安装驱动程序,把路径指向这个文件夹就可以了。
1如需要,可在网上下载“usb万能驱动包”或者“万能驱动助理XP 版WanDrv”2解压后插入u盘,出现“找到新硬件提示”提示后,将驱动文件指向“usb万能驱动所解压的文件夹”,安装即可。
昆仑通态嵌入版支持驱动列表

变频器
123 SEW SEW变频器
124 爱默生 爱默生TD1000系列变频器
125 三垦 三垦SPF系列变频器
126 三菱 三菱_500系列变频器驱动
127 东元 东元ModbusRTU
128 丹佛斯 丹佛斯VLT5000变频器
129
丹佛斯系列
130 佳灵 JP6C_T9变频器
2004-8-13 15:26 2005-9-21 10:43 2005-9-21 10:47 2005-9-21 10:52 2005-9-21 10:40 2005-9-21 10:55 2005-9-21 15:35 2005-9-21 10:57 2004-7-8 15:17 2008-8-12 13:54 2003-12-11 14:21 2004-1-4 11:17 2003-10-30 15:11 2005-8-22 17:40 2005-8-22 17:49 2005-8-22 17:54 2005-8-22 18:00 2008-8-12 14:04 2003-10-31 9:07 2003-10-28 13:58 2003-10-28 13:55 2008-8-12 14:16 2008-8-12 14:25 2008-8-12 14:34 2006-5-19 11:08 2004-7-8 15:17 2004-7-8 15:17 2004-7-8 15:17 2004-7-8 15:17 2004-8-18 15:32 2004-8-18 15:32 2004-8-18 15:32 2004-8-18 15:32 2004-8-18 15:32 2004-8-17 15:37 2008-8-12 14:54 2008-8-12 15:01 2004-5-28 15:31
RME FireFace UC中文说明书

10.1 概要 ...........................................................................................................23 10.2 ASIO下的通道数量 .......................................................................................23 10.3 已知问题...........................................................................................................24
15.1 安装驱动程序 ...........................................................................................28 15.2 升级驱动程序.................................................................................................29 15.3 升级固件.................................................................................................29
18 使用多个 Fireface ...........................................................................35 19 DIGICheck Mac.................................................................................35 20 热线 – 故障处理 ...........................................................................36
ad7606stm32f103例程

AD7606是一款16位高速模数转换器,具有8个单端或4个差分输入通道。
它集成了采样保持电路,可以用于高精度数据采集和处理。
STM32F103是一款由STMicroelectronics公司生产的Cortex-M3内核的微控制器,具有丰富的外设,包括多个通用定时器、串行外设接口和模拟数字转换器等,非常适合用于AD7606模数转换器的控制。
下面我们将介绍如何在STM32F103上实现对AD7606的驱动程序。
1. 初始化GPIO我们需要在STM32F103上初始化GPIO,将其与AD7606的控制引脚相连。
通过设置相应引脚的工作模式和输出模式,可以将控制信号发送给AD7606。
2. 确定通信协议AD7606可以通过SPI或者串行外设接口进行数据通信。
在STM32F103中,我们可以选择SPI接口或者USART接口来与AD7606进行通信。
根据实际情况选择通信协议,并进行相应的初始化设置。
3. 编写驱动程序在STM32F103上编写AD7606的驱动程序,通过相应的寄存器操作和数据传输,实现对AD7606的控制和数据采集。
在编写驱动程序时,需要充分了解AD7606的工作原理和寄存器设置,以确保程序的正确性和稳定性。
4. 数据处理在STM32F103上接收到AD7606采集到的数据后,可以进行相应的数据处理,如滤波、校准和格式转换等。
通过数据处理,可以得到准确、稳定的采集结果。
5. 应用开发通过以上步骤,我们已经在STM32F103上实现了对AD7606的驱动程序,可以开始进行应用开发。
根据实际需求,可以将AD7606应用于各种领域,如工业自动化、仪器仪表、医疗设备等。
通过以上步骤,我们可以在STM32F103上实现对AD7606的驱动程序,充分发挥AD7606的高精度采集能力,为各种应用提供可靠的数据采集解决方案。
AD7606的例程可以为嵌入式系统的开发者提供参考,帮助他们更好地理解和应用AD7606模数转换器。
万能驱动助理 v6
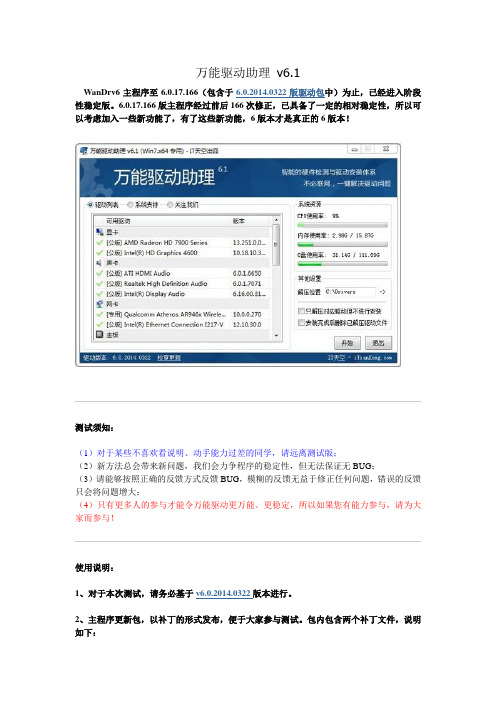
万能驱动助理v6.1WanDrv6主程序至6.0.17.166(包含于6.0.2014.0322版驱动包中)为止,已经进入阶段性稳定版。
6.0.17.166版主程序经过前后166次修正,已具备了一定的相对稳定性,所以可以考虑加入一些新功能了,有了这些新功能,6版本才是真正的6版本!测试须知:(1)对于某些不喜欢看说明、动手能力过差的同学,请远离测试版;(2)新方法总会带来新问题,我们会力争程序的稳定性,但无法保证无BUG;(3)请能够按照正确的反馈方式反馈BUG,模糊的反馈无益于修正任何问题,错误的反馈只会将问题增大;(4)只有更多人的参与才能令万能驱动更万能、更稳定,所以如果您有能力参与,请为大家而参与!使用说明:1、对于本次测试,请务必基于v6.0.2014.0322版本进行。
2、主程序更新包,以补丁的形式发布,便于大家参与测试。
包内包含两个补丁文件,说明如下:(1)使用WanDrv6.Hotfix.2014.0322.3.exe,可将WanDrv6主程序替换为6.1.19.188版,用于测试(2)使用WanDrv6.Hotfix.2014.0322.1.exe,可将WanDrv6主程序替换为6.0.17.166版,用于还原即运行WanDrv6.Hotfix.2014.0322.3.exe提升主程序版本参与测试,运行WanDrv6.Hotfix.2014.0322.1.exe还原为稳定版。
3、将补丁包放置于万能驱动助理根目录下,运行补丁,按照提示即可完自动替换:补丁安装完成后,万能驱动助理根目录下的补丁程序可删除。
下载地址:百度网盘:/s/1gdDX7u7文件: WanDrv6.Hotfix_v2014.0322.1-3.Beta.7z大小: 7895193 字节修改时间: 2014年4月29日, 17:15:08MD5: B4769154070CBE2E6B1F6D877DC3787BSHA1: 19436378CC4978A821080744F60314ABCD48B818CRC32: CEAD7D5A更新内容:[WanDrv6.Hotfix.2014.0322.3]1、修正特殊安装法运行失败的问题(如上个版本中USB3驱动无法正常安装的问题,由此产生)2、修正主界面资源使用率刷新速率3、修正主界面标题栏显示细节4、更新主界面背景图5、增加桌面自动运行参数(/fa或/forceAuto),同时修正自动设首页规则:(1)部署环境·部署环境下/fa(或/forceAuto)参数无效,自动执行,无设首页行为(2)桌面环境·使用ES4(需v4.0.17.395或以上版本支持)的专用接口调用,10秒后自动运行,无设首页行为·双击打开,不自动执行,等待用户操作,设首页选项为选中(可手动取消)·以/fa(或/forceAuto)参数自动运行,自动执行,设首页选项为选中(可手动取消)6、驱动列表的右键菜单,增加“选中所有推荐驱动”和“取消所有驱动”[WanDrv6.Hotfix.2014.0322.2]1、修正WanDrv6主子程序通信方式,并优化重试机制,提高通讯稳定性2、更改驱动安装策略,采用新方式安装驱动,抛弃3系列5系列的传统驱动安装方式反馈须知:(1)请务必说明万能驱动6主程序版本;(2)请务必反馈DEBUG文件,问题判定以DEBUG文件为准;(3)确定问题最需要的是硬件的ID,硬件ID比任何描述都精准。
usb万能驱动下载
usb万能驱动下载usb万能驱动下载usb设备越来越多,但是寻找一款通用的usb万能驱动很不容易。
Win98必须安装usb驱动才能正常识别移动的usb设备,而较新的windows xp、vista、win7等操作系统的usb识别能力就比较强,不过仍然有很多usb设备无法识别,为什么usb设备无法识别可以参考这里,而今天我们提供的是usb万能驱动程序,这两个你可以都下载,第一个是超精简版的,不过识别能力也不弱。
本usb驱动是从win2000提取出来的USB驱动,可以适用于所有通用USB接口,包括优盘usb驱动,MP3,电子词典,摄像头,并且根据本人的使用以及众多用户体验,添加了有的Win98安装时缺少的文件。
这款usb万能驱动非常小,仅24.2K,下载迅速,是各种老版usb接口的首选。
usb万能驱动下载第二个提供一款商业驱动程序软件,usb2.0万能驱动,这个软件特别适用于新买的usb设备。
usb2.0万能驱动下载usb无法使用的原因?1、前置usb线故障。
usb接口是主板集成,通常在主机的背部,但是为了大家的使用方便,都在主机的前面接了2-4个usb接口,但是这些接口不能确保都是完好的。
有的时候会出现某一个不能使用的情况,换用其他的usb口,或者从后面接一个usb连接线出来。
2、usb接口电压不足。
我们使用mp3、移动硬盘接在前置u口上时就有可能发生系统无法识别出设备的故障。
出现这种情况是mp3和移动硬盘功率比较大,而前置接口可能无法提供足够的电压,当然也有是主机电源功率不够造成的。
解决方法是移动硬盘不要接在前置usb接口上,更换劣质低功率的电源或尽量使用外接电源的硬盘盒。
3、主板兼容性问题。
这类故障中最著名的就是NF2主板与USB 的兼容性问题。
假如你是在NF2的主板上碰到这个问题的话,则可以先安装最新的nForce2专用usb2.0驱动和补丁、最新的主板补丁和操作系统补丁。
4、系统或BIOS问题。
ILI9325驱动程序,8位数据模式
ILI9325 STM32驱动程序 8位数据传输模式LCD.C#include "lcd.h"#include "stdlib.h"#include "font.h"#include "usart.h"#include "delay.h"u16 POINT_COLOR=0x0000; //u16 BACK_COLOR=0xFFFF; //void LCD_Writ_Bus(u8 VH,u8 VL) //{u16 temp1,temp2;temp1=VH*256;temp2=VL*256;GPIO_Write(GPIOB,temp1);LCD_WR_CLR;LCD_WR_SET;GPIO_Write(GPIOB,temp2);LCD_WR_CLR;LCD_WR_SET;}void LCD_WR_DATA8(u8 VH,u8 VL) //{LCD_RS_SET;LCD_Writ_Bus(VH,VL);}void LCD_WR_DATA(int da){LCD_RS_SET;LCD_Writ_Bus(da>>8,da);}void LCD_WR_REG(int da){LCD_RS_CLR;LCD_Writ_Bus(da>>8,da);}void LCD_WR_REG_DATA(int reg,int da){LCD_WR_REG(reg);LCD_WR_DATA(da);}void Address_set(unsigned int x1,unsigned int y1,unsigned int x2,unsigned int y2) {LCD_WR_REG(0x0020);LCD_WR_DATA8(x1>>8,x1);//ÉèÖÃX×ø±êλÖÃLCD_WR_REG(0x0021);LCD_WR_DATA8(y1>>8,y1); //ÉèÖÃY×ø±êλÖÃLCD_WR_REG(0x0050);LCD_WR_DATA8(x1>>8,x1); //¿ªÊ¼XLCD_WR_REG(0x0052);LCD_WR_DATA8(y1>>8,y1); //¿ªÊ¼YLCD_WR_REG(0x0051);LCD_WR_DATA8(x2>>8,x2); //½áÊøXLCD_WR_REG(0x0053);LCD_WR_DATA8(y2>>8,y2); //½áÊøYLCD_WR_REG(0x0022);}void LCD_Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOB, ENABLE); //ʹÄÜPORTB,CʱÖÓºÍAFIOʱÖÓGPIO_InitStructure.GPIO_Pin =GPIO_Pin_10|GPIO_Pin_9|GPIO_Pin_8|GPIO_Pin_7|GPIO_Pin_6|GPIO_Pin_5;///PORTC6~10¸´ÓÃÍÆÍìÊä³öGPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOC, &GPIO_InitStructure); //GPIOCGPIO_SetBits(GPIOC,GPIO_Pin_10|GPIO_Pin_9|GPIO_Pin_8|GPIO_Pin_7|GPI O_Pin_6|GPIO_Pin_5);GPIO_InitStructure.GPIO_Pin =GPIO_Pin_10|GPIO_Pin_9|GPIO_Pin_8|GPIO_Pin_10|GPIO_Pin_11|GPIO_Pin_12|GPI O_Pin_13|GPIO_Pin_14|GPIO_Pin_15; // PORTBÍÆÍìÊä³öGPIO_Init(GPIOB, &GPIO_InitStructure); //GPIOBGPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_9|GPIO_Pin_8|GPIO_Pin_10|GP IO_Pin_11|GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);LCD_RD_SET;LCD_WR_SET;LCD_RST_CLR;delay_ms(20);LCD_RST_SET;delay_ms(20);LCD_WR_REG_DATA(0x0001,0x0100);LCD_WR_REG_DATA(0x0002,0x0700);LCD_WR_REG_DATA(0x0003,0x1030);LCD_WR_REG_DATA(0x0004,0x0000);LCD_WR_REG_DATA(0x0008,0x0202); //0207LCD_WR_REG_DATA(0x0009,0x0000);LCD_WR_REG_DATA(0x000A,0x0000);LCD_WR_REG_DATA(0x000C,0x0000);LCD_WR_REG_DATA(0x000D,0x0000);LCD_WR_REG_DATA(0x000F,0x0000);//power on sequence VGHVGLLCD_WR_REG_DATA(0x0010,0x0000);LCD_WR_REG_DATA(0x0011,0x0007);LCD_WR_REG_DATA(0x0012,0x0000);LCD_WR_REG_DATA(0x0013,0x0000);//vghLCD_WR_REG_DATA(0x0010,0x1290);LCD_WR_REG_DATA(0x0011,0x0227);//delay_ms(100);//vregioutLCD_WR_REG_DATA(0x0012,0x001d); //0x001b //delay_ms(100);//vom amplitudeLCD_WR_REG_DATA(0x0013,0x1500);// delay_ms(100);//vom HLCD_WR_REG_DATA(0x0029,0x0018);LCD_WR_REG_DATA(0x002B,0x000D);//gammaLCD_WR_REG_DATA(0x0030,0x0004);LCD_WR_REG_DATA(0x0031,0x0307);LCD_WR_REG_DATA(0x0032,0x0002);// 0006 LCD_WR_REG_DATA(0x0035,0x0206);LCD_WR_REG_DATA(0x0036,0x0408);LCD_WR_REG_DATA(0x0037,0x0507);LCD_WR_REG_DATA(0x0038,0x0204);//0200LCD_WR_REG_DATA(0x0039,0x0707);LCD_WR_REG_DATA(0x003C,0x0405);// 0504 LCD_WR_REG_DATA(0x003D,0x0F02);//ramLCD_WR_REG_DATA(0x0050,0x0000); LCD_WR_REG_DATA(0x0051,0x00EF); LCD_WR_REG_DATA(0x0052,0x0000); LCD_WR_REG_DATA(0x0053,0x013F); LCD_WR_REG_DATA(0x0060,0xA700); LCD_WR_REG_DATA(0x0061,0x0001); LCD_WR_REG_DATA(0x006A,0x0000); //LCD_WR_REG_DATA(0x0080,0x0000); LCD_WR_REG_DATA(0x0081,0x0000); LCD_WR_REG_DATA(0x0082,0x0000); LCD_WR_REG_DATA(0x0083,0x0000); LCD_WR_REG_DATA(0x0084,0x0000); LCD_WR_REG_DATA(0x0085,0x0000); //LCD_WR_REG_DATA(0x0090,0x0010); LCD_WR_REG_DATA(0x0092,0x0600); LCD_WR_REG_DATA(0x0093,0x0003); LCD_WR_REG_DATA(0x0095,0x0110); LCD_WR_REG_DATA(0x0097,0x0000); LCD_WR_REG_DATA(0x0098,0x0000); LCD_WR_REG_DATA(0x0007,0x0133); }void LCD_Clear(u16 Color){u8 VH,VL;u16 i,j;VH=Color>>8;VL=Color;Address_set(0,0,LCD_W-1,LCD_H-1);for(i=0;i<LCD_W;i++){for (j=0;j<LCD_H;j++){LCD_WR_DATA8(VH,VL);}}}void LCD_DrawPoint(u16 x,u16 y,u16 Color){Address_set(x,y,x,y);LCD_WR_DATA(Color);}//»-Ò»¸ö´óµã//POINT_COLOR:´ËµãµÄÑÕÉ«void LCD_DrawPoint_big(u16 x,u16 y){LCD_Fill(x-1,y-1,x+1,y+1,POINT_COLOR);}//ÔÚÖ¸¶¨ÇøÓòÄÚÌî³äÖ¸¶¨ÑÕÉ«//ÇøÓò´óС:// (xend-xsta)*(yend-ysta)void LCD_Fill(u16 xsta,u16 ysta,u16 xend,u16 yend,u16 color) {u16 i,j;Address_set(xsta,ysta,xend,yend); //ÉèÖùâ±êλÖÃfor(i=ysta;i<=yend;i++){for(j=xsta;j<=xend;j++)LCD_WR_DATA(color);//ÉèÖùâ±êλÖà }}//»-Ïß//x1,y1:Æðµã×ø±ê//x2,y2:ÖÕµã×ø±êvoid Draw_Circle(u16 x0,u16 y0,u8 r){int a,b;int di;a=0;b=r;di=3-(r<<1); //ÅжÏϸöµãλÖõıêÖ¾while(a<=b){LCD_DrawPoint(x0-b,y0-a,POINT_COLOR); //3LCD_DrawPoint(x0+b,y0-a,POINT_COLOR); //0LCD_DrawPoint(x0-a,y0+b,POINT_COLOR); //1LCD_DrawPoint(x0-b,y0-a,POINT_COLOR); //7LCD_DrawPoint(x0-a,y0-b,POINT_COLOR); //2LCD_DrawPoint(x0+b,y0+a,POINT_COLOR); //4LCD_DrawPoint(x0+a,y0-b,POINT_COLOR); //5LCD_DrawPoint(x0+a,y0+b,POINT_COLOR); //6LCD_DrawPoint(x0-b,y0+a,POINT_COLOR);a++;//ʹÓÃBresenhamËã·¨»-Ô²if(di<0)di +=4*a+6;else{di+=10+4*(a-b);b--;}LCD_DrawPoint(x0+a,y0+b,POINT_COLOR);}}void LCD_DrawLine(u16 x1, u16 y1, u16 x2, u16 y2){u16 t;int xerr=0,yerr=0,delta_x,delta_y,distance;int incx,incy,uRow,uCol;delta_x=x2-x1; //¼ÆËã×ø±êÔöÁ¿delta_y=y2-y1;uRow=x1;uCol=y1;if(delta_x>0)incx=1; //ÉèÖõ¥²½·½Ïòelse if(delta_x==0)incx=0;//´¹Ö±Ïßelse {incx=-1;delta_x=-delta_x;}if(delta_y>0)incy=1;else if(delta_y==0)incy=0;//ˮƽÏßelse{incy=-1;delta_y=-delta_y;}if( delta_x>delta_y)distance=delta_x; //Ñ¡È¡»ù±¾ÔöÁ¿×ø±êÖáelse distance=delta_y;for(t=0;t<=distance+1;t++ )//»-ÏßÊä³ö{LCD_DrawPoint(uRow,uCol,POINT_COLOR);//»-µãxerr+=delta_x ;yerr+=delta_y ;if(xerr>distance){xerr-=distance;uRow+=incx;}if(yerr>distance){yerr-=distance;uCol+=incy;}}}void LCD_DrawRectangle(u16 x1, u16 y1, u16 x2, u16 y2){LCD_DrawLine(x1,y1,x2,y1);LCD_DrawLine(x1,y1,x1,y2);LCD_DrawLine(x1,y2,x2,y2);LCD_DrawLine(x2,y1,x2,y2);}void LCD_ShowChar(u16 x,u16 y,u8 num,u8 size,u8 mode){u16 temp,t1,t;u16 y0=y;u16 csize=(size/8+((size%8)?1:0))*(size/2);//µÃµ½×ÖÌåÒ»¸ö×Ö·û¶ÔÓ¦µãÕó¼¯ËùÕ¼µÄ×Ö½ÚÊý//ÉèÖô°¿Únum=num-' ';//µÃµ½Æ«ÒƺóµÄÖµfor(t=0;t<csize;t++){if(size==12)temp=asc2_1206[num][t]; //µ÷ÓÃ1206×ÖÌåelse if(size==16)temp=asc2_1608[num][t]; //µ÷ÓÃ1608×ÖÌåelse if(size==24)temp=asc2_2412[num][t]; //µ÷ÓÃ2412×ÖÌåelse return;//ûÓеÄ×Ö¿âfor(t1=0;t1<8;t1++){if(temp&0x80) LCD_DrawPoint(x,y,POINT_COLOR);else if(mode==0) LCD_DrawPoint(x,y,0X7D7C);temp<<=1;y++;if(x>=240)return; //³¬ÇøÓòÁËif((y-y0)==size){y=y0;x++;if(x>=240)return; //³¬ÇøÓòÁËbreak;}}}}u32 LCD_Pow(u8 m,u8 n){u32 result=1;while(n--)result*=m;return result;}void LCD_ShowNum(u16 x,u16 y,u32 num,u8 len,u8 size){u8 t,temp;u8 enshow=0;for(t=0;t<len;t++){temp=(num/LCD_Pow(10,len-t-1))%10;if(enshow==0&&t<(len-1)){if(temp==0){LCD_ShowChar(x+(size/2)*t,y,' ',size,0);continue;}else enshow=1;}LCD_ShowChar(x+(size/2)*t,y,temp+'0',size,0);}}void LCD_ShowString(u16 x,u16 y,u16 width,u16 height,u8 size,u8 *p) {u8 x0=x;width+=x;height+=y;while((*p<='~')&&(*p>=' '))//ÅжÏÊDz»ÊÇ·Ç·¨×Ö·û!{if(x>=width){x=x0;y+=size;}if(y>=height)break;//Í˳öLCD_ShowChar(x,y,*p,size,0);x+=size/2;p++;}}LCD.H#ifndef __LCD_H#define __LCD_H#include "sys.h"#include "stdlib.h"#define LCD_W 240#define LCD_H 320extern u16 BACK_COLOR, POINT_COLOR; //±³¾°É«£¬»-±ÊÉ«#define LCD_CS_SET GPIO_SetBits(GPIOC,GPIO_Pin_9) //Ƭѡ¶Ë¿ÚPC9 //Ó²¼þ½ÓµØ ûÓÃ#define LCD_RS_SET GPIO_SetBits(GPIOC,GPIO_Pin_8) //Êý¾Ý/ÃüÁîPC8#define LCD_WR_SET GPIO_SetBits(GPIOC,GPIO_Pin_7) //дÊý¾ÝPC7#define LCD_RD_SET GPIO_SetBits(GPIOC,GPIO_Pin_6) //¶ÁÊý¾ÝPC6#define LCD_RST_SET GPIO_SetBits(GPIOC,GPIO_Pin_5) //RSTPC5#define LCD_CS_CLR GPIO_ResetBits(GPIOC,GPIO_Pin_9) //Ƭѡ¶Ë¿ÚPC9 //Ó²¼þ½ÓµØ ûÓÃ#define LCD_RS_CLR GPIO_ResetBits(GPIOC,GPIO_Pin_8) //Êý¾Ý/ÃüÁîPC8#define LCD_WR_CLR GPIO_ResetBits(GPIOC,GPIO_Pin_7) //дÊý¾Ý PC7#define LCD_RD_CLR GPIO_ResetBits(GPIOC,GPIO_Pin_6) //¶ÁÊý¾Ý PC6#define LCD_RST_CLR GPIO_ResetBits(GPIOC,GPIO_Pin_5) //RSTPC5//PB10~15,×÷ΪÊý¾ÝÏß#define DATAOUT(x) GPIO_Write(GPIOB,x);#define DATAIN GPIO_ReadInputData(GPIOB)void Lcd_Init(void);void LCD_Clear(u16 Color);void Address_set(unsigned int x1,unsigned int y1,unsigned int x2,unsigned int y2); void LCD_WR_DATA8(u8 VH,u8 VL); //·¢ËÍÊý¾Ý-8λ²ÎÊývoid LCD_WR_DATA(int da);void LCD_WR_REG(int da);void LCD_DrawPoint(u16 x,u16 y,u16 Color);//»-µãvoid LCD_DrawPoint_big(u16 x,u16 y);//»-Ò»¸ö´óµãu16 LCD_ReadPoint(u16 x,u16 y); //¶Áµãvoid Draw_Circle(u16 x0,u16 y0,u8 r);u32 LCD_Pow(u8 m,u8 n);void LCD_DrawLine(u16 x1, u16 y1, u16 x2, u16 y2);void LCD_DrawRectangle(u16 x1, u16 y1, u16 x2, u16 y2);void LCD_Fill(u16 xsta,u16 ysta,u16 xend,u16 yend,u16 color);void LCD_ShowChar(u16 x,u16 y,u8 num,u8 size,u8 mode);void LCD_ShowNum(u16 x,u16 y,u32 num,u8 len,u8 size);//ÏÔʾÊý×Övoid LCD_Show2Num(u16 x,u16 y,u16 num,u8 len);//ÏÔʾ2¸öÊý×Övoid LCD_ShowString(u16 x,u16 y,u16 width,u16 height,u8 size,u8 *p);//ÏÔʾһ¸ö×Ö·û´®,16×ÖÌåvoid showhanzi(unsigned int x,unsigned int y,unsigned char index);//»-±ÊÑÕÉ«#define WHITE 0xFFFF#define BLACK 0x0000#define BLUE 0x001F#define BRED 0XF81F#define GRED 0XFFE0#define GBLUE 0X07FF#define RED 0xF800#define MAGENTA 0xF81F#define GREEN 0x07E0#define CYAN 0x7FFF#define YELLOW 0xFFE0#define BROWN 0XBC40 //×ØÉ«#define BRRED 0XFC07 //×غìÉ«#define GRAY 0X8430 //»ÒÉ«//GUIÑÕÉ«#define DARKBLUE 0X01CF //ÉîÀ¶É«#define LIGHTBLUE 0X7D7C //dzÀ¶É«#define GRAYBLUE 0X5458 //»ÒÀ¶É«//ÒÔÉÏÈýɫΪPANELµÄÑÕÉ«#define LIGHTGREEN 0X841F //dzÂÌÉ«#define LGRAY 0XC618 //dz»ÒÉ«(PANNEL),´°Ìå±³¾°É«#define LGRAYBLUE 0XA651 //dz»ÒÀ¶É«(Öмä²ãÑÕÉ«)#define LBBLUE 0X2B12 //dz×ØÀ¶É«(Ñ¡ÔñÌõÄ¿µÄ·´É«)#endif。
ES4封装win7系统的详细步骤 万能驱动助理教程
概述分析封装win7(或封装后的重装)失败的因素全面解析封装步骤1、母盘问题在虚拟机安装win7所用母盘,首推微软win7原版,或采用ZS_Win7_U_ClassicV6.7(2in1)合一版。
ZS_Win7_U_ClassicV6.7(2in1)下载地址:/2、系统减肥问题系统精简过度是造成封装失败的最主要因素。
若使用微软win7原版,仅用“自由天空系统清理&减肥程序”精简就足矣;至于ZS合一版,由于已经制作者合理精简,稳定可靠,故无需再其他减肥工具处理。
无论使用微软win7原版,还是使用ZS_Win7_U_ClassicV6.7(2in1)合一版,均可用windows 7优化大师或魔方进行优化清理。
这款软件优化适度,精简稳妥,安全可靠,对封装有利无弊。
3、启用Administrator账户的问题如果不能正确启用Administrator账户,往往会在封装过程中出现“windows无法分析或处理pass的无人参与应答文件”等提示,从而导致封装无法继续下去。
所以必须正确启用Administrator账户。
4、打补丁的问题封装前集成系统补丁,不要用金山卫士或360卫士打补丁。
近来发现,经由这两个软件下载安装补丁,可顺利封装,但在真实机的重装,成功率很低。
究其原因,是安装了这两个软件之后,已对系统进行了默认优化清理,并对所谓盗版给予某些服务项目的禁用。
可以采用IT天空提供的补丁安装助理集成补丁,对封装以及之后的重装,很安全,但是不能获得最新的补丁。
5、ES部署问题是否正确部署,也会造成封装或封装后的重装带来某些问题。
方法/步骤一、在虚拟机安装win7封装win7系统顺序是:安装虚拟机---使用DiskGenius对虚拟机分区,一般分为2个区,C区安装系统,D区存放封装所用的有关软件---在虚拟机里安装win7系统---在虚拟机系统安装必要的软件,更新系统补丁、系统优化、系统清理---在虚拟机系统中使用ES4封装系统---制作系统镜像。
基于FPGA的IEEE488接口协议实现及驱动程序开发
!计算机测量与控制!"#""!$#!%"!!"#$%&'()'*+%('#',&-!",&(".!#&$(!#收稿日期 "#""#"&%$!修回日期"#""#$"&%作者简介 刘!阳!&**'"&男&湖北十堰人&硕士研究生&主要从事嵌入式开发*自动控制等方向的研究%通讯作者 罗显志!&*,'"&男&湖北十堰人&博士&研究员&硕士生导师&主要从事软件无线电*实时高速信号处理*北斗卫星导航系统等方向的研究%引用格式 刘!阳&罗显志&周杨罗&等!基于Z 9b :的/>>>(%%接口协议实现及驱动程序开发'+(!计算机测量与控制&"#""&$#!%")&$(&(&!文章编号 &',&()*% "#"" #%#&$(#%!!-./ &#!&')"' 0!1234!&&5(,'" 67!"#""!#%!#""!!中图分类号 89",$文献标识码 :基于N 2Q =的S <<<M ]]接口协议实现及驱动程序开发刘!阳 罗显志 周杨罗 李!政!湖北大学计算机与信息工程学院&武汉!($##'""摘要 />>>(%%作为一种通用的并行总线&凭借其低延时*可靠传输等优势&广泛应用于仪器控制与测试系统中$针对目前符合/>>>(%%接口协议的专用b 9/Q 芯片如^:8**&(*B 9-,"&#*=F '%(%%等都已停产&且在售b 9/Q 控制器产品类型少且价格十分昂贵&难以满足国内市场需求的现象&采用了一种基于Z 9b :技术来实现/>>>(%%接口协议的方案&以典型的b 9/Q 接口芯片^:8**&(为蓝本&使用N E R 4O K P 语言描述b 9/Q 接口功能&调用N /<:虚拟仪器函数库开发驱动程序与设备通信&组建完整的自动测试系统&并通过<F 9/指令对仪器进行程控*数据采集等操作$该方案有效地解决了专用b 9/Q 芯片停产的问题&同时开发成本低$经实验测试实现了/>>>(%%接口协议功能&产品性能稳定&各项功能满足测试系统中的测控需求&具有一定的工程实用价值%关键词 />>>(%%$b 9/Q $^:8**&($N /<:$<F 9/$自动测试系统S #$.'#',&*&6","3S <<<M ]]S ,&'(3*0'2("&"0".*,:G (6U '(G 'U '."$#',&K *+':",N 2Q =M /C `A 2P &M C .@4A 2[G 4&c V .C `A 2P O B K &M /c G E 2P!<1G K K O K LF K I 7B 6E R A 2H /2L K R I A 64K 2>2P 42E E R 42P &V B X E 4C 24W E R S 46J&D B G A 2!($##'"&F G 42A "=>+&(*0&):S A P E 2E R A O 7A R A O O E O X B S &/>>>(%%4S\4H E O J B S E H 4242S 6R B I E 261K 26R K O A 2H 6E S 6S J S 6E I S\46G 46S A H W A 26A P E S K L O K \H E 5O A J A 2H R E O 4A X O E 6R A 2S I 4S S 4K 2!:67R E S E 26&6G E S 7E 14A Ob 9/Q1G 47S 1K 2L K R I 42P 6K 6G E />>>(%%426E R L A 1E 7R K 6K 1K O &S B 1GA S^:8**&(&B 9-,"&#A 2H =F '%(%%&G A W E X E E 2H 4S 1K 2642B E H &A 2H 6G E 7R K H B 16S K Lb 9/Q1K 26R K O O E R K 2S A O E G A W E L E \6J 7E S A 2H A R E W E R J E Y 7E 2S 4W E &\G 41G 4S H 4L L 41B O 66KI E E 66G E 2E E H S K L 6G E H K I E S 641I A R 3E 6&A S 1G E I E X A S E H K 2Z 9b :6E 1G 2K O K P J 4S A H K 76E H 6K R E A O 4[E 6G E />>>(%%4256E R L A 1E 7R K 6K 1K O &X A S E HK 26G E 6J 741A Ob 9/Q426E R L A 1E 1G 47^:8**&(&6G Eb 9/Q426E R L A 1E L B 2164K 24SH E S 1R 4X E H 42N E R 4O K P O A 2P B A P E &6G E W 4S AW 4R 6B A O 42S 6R B I E 26L B 2164K 2O 4X R A R J 4S 1A O O E H 6KH E W E O K 76G EH R 4W E R 6K1K I I B 241A 6E\46G6G EE T B 47I E 26&A1K I 7O E 6EA B 6K I A 6416E S 6S J S 6E I4S E S 6A X O 4S G E H &A 2H 6G E 42S 6R B I E 264S 7R K P R A I I E H A 2H 6G E H A 6A 4S 1K O O E 16E H 6G R K B P G 6G E <F 9/42S 6R B 164K 2S !8G E S 1G E I E E L 5L E 164W E O J S K O W E S 6G E S G B 6H K \27R K X O E IK L S 7E 14A Ob 9/Q1G 47&I E A 2\G 4O E 6G E H E W E O K 7I E 261K S 64S O K \!8G R K B P G 6G E E Y 7E R 4I E 26A O 6E S 6&6G E />>>(%%426E R L A 1E 7R K 6K 1K O L B 2164K 24S R E A O 4[E H &6G E 7R K H B 167E R L K R I A 21E 4S S 6A X O E &A 2HA O O L B 2164K 2SI E E 66G EI E A S B R E I E 26A 2H 1K 26R K O R E T B 4R E I E 26S 426G E 6E S 6S JS 6E I &\G 41GG A S 1E R 6A 42E 2P 42E E R 42P7R A 1641A O W A O B E !'@A "(:+)/>>>(%%$b 9/Q $^:8**&($N /<:$<F 9/$AB 6K I A 6416E S 6S J S 6E I B !引言在自动测试系统中&/>>>(%%总线扮演着重要的角色%它是一种面向仪器设备的通用总线接口&也被称为b 9/Q 总线'&"(%该接口最早由V 9公司提出&经过几十年的发展&已经形成了一套行业标准%且该接口能满足设备之间互相通信的功能&实现信息共享的需求%近年来&国内在自动化控制*精密仪器研制等领域发展迅猛&在医疗*军工等领域&对测试系统的需求越来也越大%b 9/Q 作为业界使用最广泛的测试总线&不仅成本低&而且传输稳定&在未来的一段时间内&国内市场仍然有一定的需求量%市面上的b 9/Q 转换器基本都采用专用接口芯片来设计&此类芯片连接微处理器&通过读写寄存器等操作能很方便的实现b 9/Q 接口的所有功能%目前&能自主生产基于/>>>5(%%协议的专用b 9/Q 接口芯片的公司仅^/*8/*^>F */26E O 几家'$(&但该类芯片都已停产&可供购买的成品b 9/Q 转换器如^/5b 9/Q 5C <Q 5V <价格在$###元以上&对国内庞大的用户群体来说成本过高%国内在测试接!投稿网址 \\\!0S 01O J3[!1K I Copyright ©博看网. All Rights Reserved.第%期刘!阳&等)基于Z 9b :的/>>>(%%""""""""""""""""""""""""""""""""""""""""""""""""""""接口协议实现及驱动程序开发#&$)!#口领域的研究较少&仅有电子科大等几个团队&且市面上国产转换器占有率不高%随着:</F 技术的飞速发展&Z 95b :在嵌入式领域得到了广泛应用&它灵活*稳定*可移植性强&所以能够用来替代一些专用芯片%基于以上因素&本文详细阐述使用Z 9b :芯片来实现/>>>(%%总线协议的方案及实现流程&为相关开发人员提供可行性参考%C !总体设计基于Z 9b :的/>>>(%%协议转换器的设计主要包括硬件和软件两部分%硬件部分包括硬件电路设计与硬件控制程序设计$软件部分主要是驱动程序开发&最后通过用户程序与仪器通信%该方案组建一套完整的测试系统&其总体结构'((如图&所示%图&!总体结构框架该方案的核心在于硬件控制程序设计&开发前需要对/>>>(%%总线协议做深入研究&同时剖析^/的^:8**&(的内部结构&掌握其协议的工作原理%硬件控制程序的主要内容是模拟b 9/Q 接口的十种功能&然后通过读写控制模块控制数据准确无误的传输&在9F 与仪器之间搭建数据传输的桥梁%软件驱动程序连接9F 与转换器&实时发送程控指令并接收返回的数据%E !硬件电路设计硬件电路设计主要包括电源模块*C <Q 5C :U 8模块*Z 9b :主控模块及外围电路*b 9/Q 接口模块%硬件设计框架如图"所示%图"!硬件设计框架E D C !电源模块电源模块为整个系统提供稳定电压%电源芯片使用=F $(#'$&该芯片性能好&市场应用广泛&可实现升压和降压功能&但其实现电路不同%本系统采用C <Q 接口供电&其电压大致为);"N 左右&所以需设计降压电路%Z 95b :芯片的不同Q:^a 所需电压不同&因此添加M =&#%(可调输出线性稳压器&提供$;$N *";)N *&;"N 工作电压%电源电路部分设计如图$所示%图$!电源模块该芯片内部有恒定的&;")N 基准电压&输出电压与U $)和U $'的阻值有关&其输出电压的计算公式为)U K B 6#&^")$!&%3$'-3$)"!&"!!由公式!&"推出&为输出)N 电压&U $'和U $'的阻值分别为&#a 和$a $%E D E !YL K J Y =/O 模块C <Q 5C :U 8模块建立9F 端与主控芯片的数据通道%协议转换芯片采用F V $(#b 5C <Q 转串口芯片&该芯片外围电路简单&性能稳定&资料丰富%电路中将3.与8.引脚接入Z 9b :芯片进行数据交换&-f 与-]接入C <Q 接口数据引脚与9F 端进行数据交换%该芯片工作时需外接&"=晶振&同时为保证系统时钟的同步&引出时钟输入引脚与Z 9b :芯片相连%C <Q 5C :U 8模块如图(所示%图(!C <Q 5C :U 8模块E DF !N2Q =主控模块及Q 2S K 接口模块Z 9b :主控芯片的选择参考市场两大主流Z 9b :芯片厂商&再结合本项目的设计要求&最终采用@4O 42Y 的<7A R 56A 25'系列的@F '<M @(芯片&该芯片的引脚数和容量能满足设计需求&且网络资源充足&易上手%!投稿网址 \\\!0S 01O J3[!1K I Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#&$'!#主控芯片的差分引脚主要与b 9/Q 接口的&'根信号线和C :U 8模块的数据线连接&以实现接口的控制和数据传输%外围电路还包括+8:b 下载电路*<-U :=外部存储模块以及时钟和复位电路%+8:b 下载调试电路使用@F Z #&<N ."#F 5Z 9b :配置芯片&系统外部时钟采用)#=晶振%此外&使用a (<)&&'$"Q 58F ,)存储芯片设计<-U :=外部存储模块&防止因Z 9b :芯片内部缓存不足造成数据丢失的现象%主控模块还外接了M >-小灯等外围电路&用来作为数据读写的指示灯%传统的b 9/Q 接口电路模块一般由专用b 9/Q 接口芯片和总线收发器组成%本方案使用Z 9b :芯片模拟b 9/Q 接口功能&因此无需b 9/Q 接口芯片和总线收发器%但b 9/Q 接口工作电压是)N &而Z 9b :芯片的最高电压为$;$N &故在Z 9b :芯片与b 9/Q 接口之间添加=.<5^模块实现电平转换%F !硬件控制程序设计硬件控制程序是设计的核心与难点%在设计之前&需要对/>>>(%%总线协议和b 9/Q 接口芯片的内部结构做深入研究%F D C !S <<<M ]]总线介绍/>>>(%%总线')'(自提出以来&一直被广泛应用于测试*控制等领域%它由数据线*三根握手线*五根接口管理线以及地线组成%三根握手线配合工作&通知总线何时传输数据&何时接收数据&确保数据传输准确无误%接口管理线:8^控制总线上传输的是数据还是指令&>./提示总线何时传输结束等&/Z F 设置所有的设备于静止状态&U >^使能设备进行远程编程&<U ?提醒控制器是否需要服务%在工作时&测试系统存在$种角色&即控者负责发送各种命令&讲者发送数据&听者接收数据%典型的b 9/Q 专用接口芯片^:8**&(的内部电路主要分为两部分%一部分面向b 9/Q 总线&主要包括b 9/Q 接口的十种功能以及各种缓冲器和译码器%另一部分面向微处理器&通过编写驱动程序让微处理器访问")个可寻址寄存器&其主要类型有数据类寄存器*中断类寄存器*地址类寄存器%^:8**&(的内部结构',%(如图)所示%b 9/Q 接口共定义了&#种接口功能&分别是源方和受方挂钩功能*讲者*听者*控者*器件清除功能*服务请求功能*并行轮询功能*远控-本控功能*器件触发功能%其中前五种是基本接口功能&后)种是辅助接口功能%基本功能是所有带b 9/Q 接口的设备必须具备的&保证测试系统中各仪器之间能相互通信&辅助功能让测试系统更便捷*更智能%F D E !Q2S K 接口功能的程序设计与仿真该方案的硬件程序使用N E R 4O K P 硬件描述语言进行开发&软件采用@4O 42Y 的/<>%整体设计采用自顶向下的设计思想&将整个系统拆分成若干个子功能模块&其中包括串图)!^:8**&(内部结构口数据收发模块*数据读写控制模块*中断模块以及b 9/Q 接口功能模块&每个子功能模块又有不同的状态&同一时刻只允许存在同一种状态&不同的状态又通过相互联系的小状态机进行切换&且状态的改变与之前设备所处的状态关联&这样就构成了一个相互排斥又相互联系的状态机%通过各模块的接口功能状态机的联系&最总形成一个顶层b 9/Q 接口功能状态机%b 9/Q 接口功能的实现依赖于各个功能模块的实现&由于篇幅有限&该章节主要对b 9/Q 接口的讲者!8"*听者!M "功能*Z /Z .模块的设计进行详细描述&并利用=K H E 5O S 4I 软件进行仿真验证%$;";&!讲功能!8"设计讲功能'*&#(的主要作用是将用户发送的程控指令或者数据通过总线发送到测试系统中的仪器中&或者将仪器自身的工作状态以及参数等信息通过数据总线传输到9F 端%只有当系统控者寻址讲者或者设备通过6K 2指令将自身设置为讲者时&才赋予这种功能%同一时刻&一个测试系统中只存在一位讲者%讲功能的状态分为8/-<!讲者空闲态"*8:-<!讲者被寻址态"*8:F <!讲者活动态"*<9:<!串行活动态"*<9/<!串行空闲态"*<9=<!串行模式"共'种&按照协议功能又分为讲者数据传输和串行轮询两组事件&分别如图'!A "和图'!X"所示%讲者状态图如图)所示%事件!A "中&在设备上电后&讲功能同时进入8/-<和<9/<两种状态&此时不具备数据传输能力%当设备被寻址为讲者!即=8:m &"或设备通过6K 2指令设置自身为讲!投稿网址 \\\!0S 01O J3[!1K I Copyright ©博看网. All Rights Reserved.第%期刘!阳&等)基于Z 9b :的/>>>(%%""""""""""""""""""""""""""""""""""""""""""""""""""""接口协议实现及驱动程序开发#&$,!#图'!讲功能状态图者&且:F -<为活动态时&讲功能进入被寻址态&此时讲者准备好发送数据%:8^信号线决定系统传输的数据类型&当:8^为假时&表示b 9/Q 总线上传输的是数据&当<9=<是活动态时&设备进入<9:<状态$当<9=<为假时&讲者进入8:F <状态&此时配合<V 功能将数据传到b 9/Q 数据总线%当设备处于<9:<或8:F <状态时&若:8^为真&说明系统控者发送命令&讲功能返回寻址态%事件!X "中&若<9>为真&即允许串行查询&听者进入串行轮询模式状态&并参与串行轮询%当系统活动控者发送<9-命令&即禁用串行轮询%听者进入串行轮询空闲状态%讲功能的N E R 4O K P 设计包括了图)中两组状态&每种状态的转换都通过分析当前的状态机来转换&结合各状态之间相互排斥又相互联系的特征&8/-<和<9/<采用并行语句执行%!X"状态的具体实现的核心部分代码如下所示)1A S E !1B R R E 264S 6A 6E 4""84<8:8>4"4<9/<)4L !E W E 26"4&"1B R R E 264S 6A 6E 4"+m 84<8:8>4"4<9=<$84<8:8>4"4<9=<)4L !E W E 26"4$"1B R R E 264S 6A 6E 4"+m 84<8:8>4"4<9/<$E O S E 4L !E W E 26"4""1B R R E 264S 6A 6E 4"+m 84<8:8>4"4<9/<$H E L A B O 6)1B R R E 264S 6A 6E 4"+m 84<8:8>4"4<9/<$E 2H 1A S EA S S 4P 2E W E 26"4&m <9>!&s X &d :F -<!&s X &$A S S 4P 2E W E 26"4"m <9-!&s X &d :F -<!&s X &$A S S 4P2E W E 26"4$m /Z F !&s X &$通过编写8E S 6X E 21G 仿真文件&使用=K H E O S 4I 仿真后波形如图,所示%根据分析可以看出&讲功能的每个状态严格按照状态图进行变换&且同一时刻只存在一种活动态%$;";"!听功能!M "设计听功能'&&(的主要作用是接收仪器发送过来的状态信息或者主控设备的指令%同一时刻&一个测试系统中可以存在多位听者%图,!讲功能仿真波形听功能的状态分为M /-<!听者空闲态"*M :-<!听者被寻址态"*M :F <!听者活动态"*M 9/<!听者主空闲态"*M 9:<!听者主被寻址态"&其中后两种为扩展听者!M >"状态%听者状态如图%所示%图%!听功能及扩展听功能状态图状态图!A "是听功能的状态图&当设备上电后&听功能同时进入M /-<和M 9/<两种状态%当设备被寻址为听者!=M :m&"或者设备通过O K 2指令设置自身为听者&且:F -<为活动态时&听功能进入被寻址态&此时听者准备好接收数据%若:8^为假&表示b 9/Q 总线上传输数据&此时听者变为M :F <状态&并且配合:V 功能从数据总线上接收数据%若:8^为真&表示b 9/Q 总线传输命令&听者由活动态变为被寻址态%当控者发出B 2O 命令&宣布测试系统内所有的设备取消听者状态&且:F -<为真时&听者进入空闲态%状态图!X "是扩展听功能的状态图&在M 9/<状态下&听功能可以识别它的主地址&但无法响应它的副地址%当听功能被寻址且处于接收数据状态时&听功能进入被寻址主状态&此时听功能可以识别并响应它的副地址%听功能的=K H E O S 4I 仿真波形如图*所示%$;";$!Z/Z .模块设计为提高系统传输数据的稳定性&避免因控制端和数据端传输速率差异造成的数据丢失现象&设计Z /Z .模块作为数据缓冲区%Z /Z .模块连接读写控制端和数据总线端%读写控制部分由F O 3*U E S E 64Z 4L K *U E A H *D R 46E *Q B L L E R 4L B O O 组成&H A 6A 442',)#(和H A 6A 4K B 6',)#(连接数据总线%当转换器身份为讲者时&从Z /Z .中取数据放入总线&若Z /Z .!投稿网址 \\\!0S 01O J3[!1K I Copyright ©博看网. All Rights Reserved.!!计算机测量与控制!第$#""""""""""""""""""""""""""""""""""""""""""""""""""""卷#&$%!#图*!听功能仿真波形数据为空&则读写控制端写入准备发送的数据%当转换器身份为听者时&将总线上的数据存入Z /Z .&若Z /Z .存在数据&则通知读写控制端读取数据%Z /Z .的U 8M 视图如图&#!A "所示%=K H E O S 4I 仿真波形如图&#!X"所示%图&#!Z /Z .U 8M 视图与仿真波形F D F !内部寄存器设计^:8**&(芯片的工作主要通过配置内部寄存器来完成%设计中通过读写控制模块对各个寄存器进行配置&从而控制接口的数据传输%设计的寄存器主要有地址寄存器*b 9/Q 总线寄存器*b 9/Q 状态寄存器*接口功能寄存器*b 9/Q 控者寄存器*读写控制寄存器&中断控制寄存器%其中&中断寄存器/<U #与听*讲功能相关&其结构如表&所示%表&!/<U #寄存器,')($"&#/<U #/^8#/^8&Q /Q .>^-<9:<U M F=:F/<U #可读寄存器的Q /*Q .*>^-位分别代表数据接收位*数据发送位*数据传输结束位%当设备为系统活动控者或者讲者时&Q .位置&&此时可以向系统内其他设备发送命令或数据$当设备为听者时&当数据接收寄存器接收到数据时&Q /位置&$当接收到结束符#Y #:时&>^-位置&&结束本次数据传输%F D M !Q2S K 数据传输数据传输是硬件控制程序的核心部分&也是该协议转换器要实现的最主要功能%在各个子功能模块完成的基础上&构建从C :U 8模块到b 9/Q 接口模块的数据通道%数据的传输主要依靠设备的听*讲功能以及读写控制模块&还有Z /Z .存储模块%听讲功能控制数据传输的方向&Z /Z .模块控制数据的存取%读写控制模块直接配置状态寄存器&进而配置b 9/Q 的接口功能&并配合Z /Z .模块完成数据的存取%在程序中设计了b 9/Q 4U E A H 和b 9/Q 4D R 46E 两个资源文件&用来实现b 9/Q 的读写操作%在b 9/Q 4U E A H 模块中&输入输出端口名分为b 9/Q 接口*外部接口*Z /Z .模块$部分%b 9/Q 接口部分用来判断当时是否处于听活跃状态&外部接口模块负责产生数据中断等信号&Z /Z .模块则提示是否存在数据以及数据的存取%b 9/Q 4D R 46E模块的结构与b 9/Q 4U E A H 模块基本类似%读写的逻辑结构如图&&所示%图&&!b 9/Q 读-写流程图M !软件驱动程序设计M D C 
D RIVER L IST FOR G3,D ATA S TATION P LUS AND M ODULAR C ONTROLLERCurrent as of April 2011Ethernet Drivers∙<System>: Port Forwarder∙<System>: Raw TCP/IP Active∙<System>: Raw TCP/IP Passive∙<System>: Raw UDP/IP∙AC Tech: Simple Servo UDP∙Acromag: TCP/IP Master∙Adenus: Telnet Driver∙Allen-Bradley: DF1 Master∙Allen-Bradley: DF1 Master via PCCC/EIP∙Allen-Bradley: DF1 Slave∙Allen-Bradley: Encapsulated DF1 Master∙Allen-Bradley: Native Tag Addressing∙Allen-Bradley: Native Tags via L5K file∙Alstom: ALSPA TCP/IP Master via SRTP∙Alstom: GEM80 ESP TCP/IP Master∙BACnet: 802.3 Master∙BACnet: 802.3 Slave∙BACnet: UDP/IP Master∙BACnet: UDP/IP Slave∙Banner: PresencePLUS Data∙Banner: PresencePLUS Image*∙Beckhoff: ADS/AMS TCP∙Bristol Babcock BSAP: UDP Slave*∙Bristol Babcock BSAP: UDP∙CTI: 2500/2572 CAMP TCP/IP Master∙CTI: NITP TCP/IP Master∙EtherNet I/P: Slave Adapter∙EZ Automation: EZ TCP/IP Master∙Fatek: PLC∙Galil: TCP/IP Driver∙GE: TCP/IP Master via SRTP∙Honeywell: S9000∙KEB: DIN66019II TCP/IP Master∙Maguire: MLAN TCP/IP∙Mitsubishi: A/Q/FX Series TCP/IP Master∙Mitsubishi: A/Q/FX Series UDP/IP Master∙Mitsubishi: FX2N Encapsulated TCP/IP Master ∙Mitsubishi: Q Series TCP/IP Master∙Modbus: Device Gateway∙Modbus: Encapsulated Master∙Modbus: TCP/IP Master∙Modbus: TCP/IP Slave∙Omron: G9SP-Series via FINS∙Omron: Master via FINS∙Panasonic - Matsushita: FP Series - FP MEWTOCOL-COM TCP/IP Master∙Parker: Acroloop TCP/IP Master∙Parker: Compumotor 6K TCP/IP Master∙Phoenix Contact: nanoLC TCP∙PLC Direct Koyo: EBC UDP/IP Master∙PLC Direct Koyo: ECOM UDP/IP Master∙Schneider: PLC via Modbus TCP/IP∙Schneider - Telemecanique: TSX 57 TCP/IP Master* ∙Siemens: S5 AS511 via TCP/IP Version 1.04 ∙Siemens: S5 AS511 via TCP/IP Version 2.02 ∙Siemens: S7 300/400 TCP/IP Master∙Siemens: S7 CP243 via ISO TCP/IP Master∙Siemens: TI 500 Series TCP/IP Master∙Toshiba: T2 PLC Master∙Toyoda: PUC TCP/IP∙Unitronics: PCOM ASCII TCP/IP Master∙Unitronics: PCOM Binary TCP/IP Master∙Yamaha: RCX Series TCP/IP Master∙Yaskawa: TCP/IP Master (Legacy Only)∙Yaskawa: TCP/IP Memobus Master∙Yaskawa: TCP/IP MP2000iec∙Yaskawa: TCP/IP Series 7∙Yaskawa: TCP/IP Universal SMC Master∙Yokogawa: FA-M3 PLC TCP/IP MasterSerial Drivers∙<System>: Generic Program-Thru∙<System>: PPP and Modem Client∙<System>: PPP and Modem Server∙<System>: Raw Serial Port∙<System>: SMS via GSM Modem∙<System>: Virtual Serial Port∙ABB: COMLINK Master∙AC Tech: Simple Servo∙Adam: 4000 Series Modules∙Allen-Bradley: DF1 Master∙Allen-Bradley: DH485 Master∙Allen-Bradley: Native Tag Addressing∙Allen-Bradley: Ultra 3000∙Alpha Gear: Ternary∙Alstom: ALSPA Master via SNP∙Alstom: GEM80 ESP J/K Master∙Alstom: GEM80 ESP J/K Slave∙Alstom: GEM80 ESP Program Port Master ∙Animatics: Smart Motor∙Applied Motion: SCL∙BACnet: MS/TP Master**∙BACnet: MS/TP Slave**∙Baldor: Mint Host∙Bristol Babcock BSAP: BSAP Serial Slave* ∙Bristol Babcock BSAP: Serial∙Caterpillar: Data Link Monitor 1.0*∙Contrex: M(L)-Trim/ML-Drive∙Contrex: M-Rotary/M-Cut∙Control Techniques: Mentor II Master∙Cruisair: Temperature Controller∙CTC: 2000 Series Master∙CTI: 25xx CAMP Master∙CTI: NITP Serial Master∙Danfoss: VLT/FC Series∙Dri-Air: ADC*∙Dupline: Mastergenerator via Modbus∙Eaton: ELC Master∙Elmo: Elmo Drives∙EMCO: FP-93∙Emerson: ER3000*∙Emerson - Control Techniques: Quantum ∙EZ Automation: EZ Master∙Fatek: PLC∙Festo: FPC, IPC, FEC, Series Controller ∙FlowCom: Master∙Galil: Serial Driver∙Garmin: NMEA-0183 ∙GE: SNP Master∙GE: SNP-X Master∙Giddings and Lewis: C/E Controller∙Hardy Instruments: Hardy Link∙HBM: AED/PW/FIT∙Hectronic: Controller*∙Hitachi: Hitachi H Series∙Honeywell: IPC620∙ICP DAS: DCON Serial Master∙IDEC: Micro 3 Series/ONC∙IFM: ASI Master via CoDeSys SP∙IMO: G Series Loader Port∙IMO: K Series Loader Port∙IMO: PLC-CNET∙Indramat: CLC Master∙Intelligent Actuator: Robocylinder/E-Con∙Intelligent Actuator: XSEL∙InUSA: SCI-TURBO L∙Ircon: Modline∙Johnson Controls: Metasys N2 Slave∙Julabo: Circular Head*∙KEB: DIN66019II Master∙KEB: DIN66019II Slave∙Keltec: Power Supply*∙Keyence: KV Series∙King: KingBus ASCII∙Klockner Moeller: PS4-201∙Kollmorgan: AC Drives∙Krohne: Flowmeter IFC020D∙Laetus: Barcode Scanners∙Lenze: LECOM-A/B Master∙LG-LS Industrial Systems: Master-K via CNET ∙Maguire: MLAN∙Matsushita: FP Series∙MicroMod: Extended Modbus∙Mitsubishi Electric: A/Q/FX Series - MELSEC ∙Mitsubishi Electric: FX Series∙Mitsubishi Electric: MELSEC 4 Slave∙Mitsubishi Electric: MELSERVO∙Modbus: ASCII Slave∙Modbus: Device Gateway∙Modbus: RTU Monitor∙Modbus: RTU Slave∙Modbus: Universal Master∙Motrona: LECOM Master∙MP Electronics: GTI Series and Similar∙MTS: DDA Master∙MTS: DDA Slave∙MTS: Modbus Master∙Omron: Master via FINS∙Omron: Series C PLC∙Oriental Motor: Motor Drive*∙Pacific Scientific: 830 Master∙Panasonic - Matsushita: FP Series - FP MEWTOCOL-COM∙Panasonic - Matsushita: FP Series -MEWTOCOL-DAT (Binary)∙Parker: Acroloop Motion Controller∙Parker: Compumotor 6K Master∙Pason: WITS*∙Phoenix Contact: nanoLC∙PLC Direct Koyo: DirectNet∙PLC Direct Koyo: K Sequence∙PQ Systems: TERN Controller*∙QuickSilver: Quicksilver Master∙Red Lion: Big Flexible Display*∙Red Lion: Plant Floor Marquee*∙Red Lion: RLC Instrument∙Rexroth Indramat: Ecodrive∙Rexroth Indramat: SIS∙Richards-Wilcox: Intelligent Storage Systems* ∙Schneider: PLC via Modbus∙Schneider - Telemecanique: Uni-Telway Master ∙Schneider - Telemecanique: Uni-Telway Slave ∙SEW: MOVILINK A Master∙SEW: MOVILINK B Master∙Siemens: S5 via AS511 Version 1.04∙Siemens: S5 via AS511 Version 2.02∙Siemens: S7 via MPI Adaptor∙Siemens: S7 via PPI Version 1.02∙Siemens: S7 via PPI Version 2.00∙Siemens: TI-500 Series Version 1.03∙Siemens: TI-500 Series Version 2.00∙Siemens: USS Drives∙SMC: LC8∙Square D: SYMAX*∙SSD Drives: 590 (Old Style)∙SSD Drives: 590+∙SSD Drives: 631∙SSD Drives: 635/637∙SSD Drives: 690+/650v∙Stiebel Eltron: WPMII∙Toshiba: Series PLC∙Toshiba: Tosvert Inverter* ∙Unitronics: Master∙Unitronics: PCOM ASCII Master ∙Unitronics: PCOM Binary Master ∙Yamaha: RCX Series∙Yaskawa: FSP Drive∙Yaskawa: Legend/SMC 3010∙Yaskawa: MP Series Controller ∙Yaskawa: NS600 Indexer∙Yaskawa: Series 7 Inverters∙Yaskawa: SGDH∙Yaskawa: Universal SMC∙YET: Xtra Drive∙Yokogawa: FA-M3 PLC MasterExpansion Card DriversCellular Modem Card∙PPP and Modem Client∙PPP and Modem Server∙SMS via GSM ModemMPI Interface∙Siemens: S7 300/400 MasterCAN Interface∙CANOpen: Baldor SDO Slave∙CANOpen: SDO Master∙CANOpen: SDO Slave∙Dometic: AirNet CAN∙PQ Systems: TERN Controller*∙SAE: J1939DeviceNet Interface∙Predefined Group 2 Server Version 1.01∙Predefined Group 2 Server Version 2.00Profibus Interface∙Profibus-DP (Type M)∙Profibus-DP (Type S)CDL Interface∙Caterpillar: Data Link Manual Monitor 1.0∙Caterpillar: Data Link Monitor 1.0∙Caterpillar: Data Link Monitor 2.0* Driver in Crimson 2 only.** Not supported on Kadet models.Note: Not all drivers are supported on all hardware models. Check the most recent version of Crimson at .。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
D RIVER L IST FOR G3,D ATA S TATION P LUS AND M ODULAR C ONTROLLERCurrent as of April 2011Ethernet Drivers∙<System>: Port Forwarder∙<System>: Raw TCP/IP Active∙<System>: Raw TCP/IP Passive∙<System>: Raw UDP/IP∙AC Tech: Simple Servo UDP∙Acromag: TCP/IP Master∙Adenus: Telnet Driver∙Allen-Bradley: DF1 Master∙Allen-Bradley: DF1 Master via PCCC/EIP∙Allen-Bradley: DF1 Slave∙Allen-Bradley: Encapsulated DF1 Master∙Allen-Bradley: Native Tag Addressing∙Allen-Bradley: Native Tags via L5K file∙Alstom: ALSPA TCP/IP Master via SRTP∙Alstom: GEM80 ESP TCP/IP Master∙BACnet: 802.3 Master∙BACnet: 802.3 Slave∙BACnet: UDP/IP Master∙BACnet: UDP/IP Slave∙Banner: PresencePLUS Data∙Banner: PresencePLUS Image*∙Beckhoff: ADS/AMS TCP∙Bristol Babcock BSAP: UDP Slave*∙Bristol Babcock BSAP: UDP∙CTI: 2500/2572 CAMP TCP/IP Master∙CTI: NITP TCP/IP Master∙EtherNet I/P: Slave Adapter∙EZ Automation: EZ TCP/IP Master∙Fatek: PLC∙Galil: TCP/IP Driver∙GE: TCP/IP Master via SRTP∙Honeywell: S9000∙KEB: DIN66019II TCP/IP Master∙Maguire: MLAN TCP/IP∙Mitsubishi: A/Q/FX Series TCP/IP Master∙Mitsubishi: A/Q/FX Series UDP/IP Master∙Mitsubishi: FX2N Encapsulated TCP/IP Master ∙Mitsubishi: Q Series TCP/IP Master∙Modbus: Device Gateway∙Modbus: Encapsulated Master∙Modbus: TCP/IP Master∙Modbus: TCP/IP Slave∙Omron: G9SP-Series via FINS∙Omron: Master via FINS∙Panasonic - Matsushita: FP Series - FP MEWTOCOL-COM TCP/IP Master∙Parker: Acroloop TCP/IP Master∙Parker: Compumotor 6K TCP/IP Master∙Phoenix Contact: nanoLC TCP∙PLC Direct Koyo: EBC UDP/IP Master∙PLC Direct Koyo: ECOM UDP/IP Master∙Schneider: PLC via Modbus TCP/IP∙Schneider - Telemecanique: TSX 57 TCP/IP Master* ∙Siemens: S5 AS511 via TCP/IP Version 1.04 ∙Siemens: S5 AS511 via TCP/IP Version 2.02 ∙Siemens: S7 300/400 TCP/IP Master∙Siemens: S7 CP243 via ISO TCP/IP Master∙Siemens: TI 500 Series TCP/IP Master∙Toshiba: T2 PLC Master∙Toyoda: PUC TCP/IP∙Unitronics: PCOM ASCII TCP/IP Master∙Unitronics: PCOM Binary TCP/IP Master∙Yamaha: RCX Series TCP/IP Master∙Yaskawa: TCP/IP Master (Legacy Only)∙Yaskawa: TCP/IP Memobus Master∙Yaskawa: TCP/IP MP2000iec∙Yaskawa: TCP/IP Series 7∙Yaskawa: TCP/IP Universal SMC Master∙Yokogawa: FA-M3 PLC TCP/IP MasterSerial Drivers∙<System>: Generic Program-Thru∙<System>: PPP and Modem Client∙<System>: PPP and Modem Server∙<System>: Raw Serial Port∙<System>: SMS via GSM Modem∙<System>: Virtual Serial Port∙ABB: COMLINK Master∙AC Tech: Simple Servo∙Adam: 4000 Series Modules∙Allen-Bradley: DF1 Master∙Allen-Bradley: DH485 Master∙Allen-Bradley: Native Tag Addressing∙Allen-Bradley: Ultra 3000∙Alpha Gear: Ternary∙Alstom: ALSPA Master via SNP∙Alstom: GEM80 ESP J/K Master∙Alstom: GEM80 ESP J/K Slave∙Alstom: GEM80 ESP Program Port Master ∙Animatics: Smart Motor∙Applied Motion: SCL∙BACnet: MS/TP Master**∙BACnet: MS/TP Slave**∙Baldor: Mint Host∙Bristol Babcock BSAP: BSAP Serial Slave* ∙Bristol Babcock BSAP: Serial∙Caterpillar: Data Link Monitor 1.0*∙Contrex: M(L)-Trim/ML-Drive∙Contrex: M-Rotary/M-Cut∙Control Techniques: Mentor II Master∙Cruisair: Temperature Controller∙CTC: 2000 Series Master∙CTI: 25xx CAMP Master∙CTI: NITP Serial Master∙Danfoss: VLT/FC Series∙Dri-Air: ADC*∙Dupline: Mastergenerator via Modbus∙Eaton: ELC Master∙Elmo: Elmo Drives∙EMCO: FP-93∙Emerson: ER3000*∙Emerson - Control Techniques: Quantum ∙EZ Automation: EZ Master∙Fatek: PLC∙Festo: FPC, IPC, FEC, Series Controller ∙FlowCom: Master∙Galil: Serial Driver∙Garmin: NMEA-0183 ∙GE: SNP Master∙GE: SNP-X Master∙Giddings and Lewis: C/E Controller∙Hardy Instruments: Hardy Link∙HBM: AED/PW/FIT∙Hectronic: Controller*∙Hitachi: Hitachi H Series∙Honeywell: IPC620∙ICP DAS: DCON Serial Master∙IDEC: Micro 3 Series/ONC∙IFM: ASI Master via CoDeSys SP∙IMO: G Series Loader Port∙IMO: K Series Loader Port∙IMO: PLC-CNET∙Indramat: CLC Master∙Intelligent Actuator: Robocylinder/E-Con∙Intelligent Actuator: XSEL∙InUSA: SCI-TURBO L∙Ircon: Modline∙Johnson Controls: Metasys N2 Slave∙Julabo: Circular Head*∙KEB: DIN66019II Master∙KEB: DIN66019II Slave∙Keltec: Power Supply*∙Keyence: KV Series∙King: KingBus ASCII∙Klockner Moeller: PS4-201∙Kollmorgan: AC Drives∙Krohne: Flowmeter IFC020D∙Laetus: Barcode Scanners∙Lenze: LECOM-A/B Master∙LG-LS Industrial Systems: Master-K via CNET ∙Maguire: MLAN∙Matsushita: FP Series∙MicroMod: Extended Modbus∙Mitsubishi Electric: A/Q/FX Series - MELSEC ∙Mitsubishi Electric: FX Series∙Mitsubishi Electric: MELSEC 4 Slave∙Mitsubishi Electric: MELSERVO∙Modbus: ASCII Slave∙Modbus: Device Gateway∙Modbus: RTU Monitor∙Modbus: RTU Slave∙Modbus: Universal Master∙Motrona: LECOM Master∙MP Electronics: GTI Series and Similar∙MTS: DDA Master∙MTS: DDA Slave∙MTS: Modbus Master∙Omron: Master via FINS∙Omron: Series C PLC∙Oriental Motor: Motor Drive*∙Pacific Scientific: 830 Master∙Panasonic - Matsushita: FP Series - FP MEWTOCOL-COM∙Panasonic - Matsushita: FP Series -MEWTOCOL-DAT (Binary)∙Parker: Acroloop Motion Controller∙Parker: Compumotor 6K Master∙Pason: WITS*∙Phoenix Contact: nanoLC∙PLC Direct Koyo: DirectNet∙PLC Direct Koyo: K Sequence∙PQ Systems: TERN Controller*∙QuickSilver: Quicksilver Master∙Red Lion: Big Flexible Display*∙Red Lion: Plant Floor Marquee*∙Red Lion: RLC Instrument∙Rexroth Indramat: Ecodrive∙Rexroth Indramat: SIS∙Richards-Wilcox: Intelligent Storage Systems* ∙Schneider: PLC via Modbus∙Schneider - Telemecanique: Uni-Telway Master ∙Schneider - Telemecanique: Uni-Telway Slave ∙SEW: MOVILINK A Master∙SEW: MOVILINK B Master∙Siemens: S5 via AS511 Version 1.04∙Siemens: S5 via AS511 Version 2.02∙Siemens: S7 via MPI Adaptor∙Siemens: S7 via PPI Version 1.02∙Siemens: S7 via PPI Version 2.00∙Siemens: TI-500 Series Version 1.03∙Siemens: TI-500 Series Version 2.00∙Siemens: USS Drives∙SMC: LC8∙Square D: SYMAX*∙SSD Drives: 590 (Old Style)∙SSD Drives: 590+∙SSD Drives: 631∙SSD Drives: 635/637∙SSD Drives: 690+/650v∙Stiebel Eltron: WPMII∙Toshiba: Series PLC∙Toshiba: Tosvert Inverter* ∙Unitronics: Master∙Unitronics: PCOM ASCII Master ∙Unitronics: PCOM Binary Master ∙Yamaha: RCX Series∙Yaskawa: FSP Drive∙Yaskawa: Legend/SMC 3010∙Yaskawa: MP Series Controller ∙Yaskawa: NS600 Indexer∙Yaskawa: Series 7 Inverters∙Yaskawa: SGDH∙Yaskawa: Universal SMC∙YET: Xtra Drive∙Yokogawa: FA-M3 PLC MasterExpansion Card DriversCellular Modem Card∙PPP and Modem Client∙PPP and Modem Server∙SMS via GSM ModemMPI Interface∙Siemens: S7 300/400 MasterCAN Interface∙CANOpen: Baldor SDO Slave∙CANOpen: SDO Master∙CANOpen: SDO Slave∙Dometic: AirNet CAN∙PQ Systems: TERN Controller*∙SAE: J1939DeviceNet Interface∙Predefined Group 2 Server Version 1.01∙Predefined Group 2 Server Version 2.00Profibus Interface∙Profibus-DP (Type M)∙Profibus-DP (Type S)CDL Interface∙Caterpillar: Data Link Manual Monitor 1.0∙Caterpillar: Data Link Monitor 1.0∙Caterpillar: Data Link Monitor 2.0* Driver in Crimson 2 only.** Not supported on Kadet models.Note: Not all drivers are supported on all hardware models. Check the most recent version of Crimson at .。