基于STM32F407的双足机器人
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计随着科技的不断发展,智能家居产品也越来越受人们的欢迎,扫地机器人作为智能家居产品的代表,已经成为了很多家庭的必备之物。
本文将基于STM32单片机设计一款扫地机器人。
我们需要选择合适的硬件平台。
STM32单片机是一种性能稳定、功耗低、容易学习的微控制器,非常适合用于控制扫地机器人。
我们可以选择STM32F407系列的单片机,其具有较大的存储容量和丰富的外设接口,可以满足扫地机器人的需求。
我们需要设计机器人的机械结构。
扫地机器人一般包括底盘、测距传感器、清扫装置等部分。
底盘一般由两个驱动电机驱动,可以选择直流无刷电机作为驱动源。
测距传感器可以选择红外线传感器或超声波传感器,用于检测周围环境。
清扫装置可以选择刷子或电动吸尘器等方式,用于清扫地面。
接下来,我们需要编写控制程序。
我们需要实现对驱动电机的控制。
通过控制电机的转速和方向,可以实现机器人的前进、后退、转向等动作。
我们需要使用传感器来检测机器人周围的环境。
根据传感器的测量数据,可以判断机器人是否遇到障碍物,并做出相应的反应。
我们需要设计自动充电功能,保证机器人在电量不足时能够自动返回充电桩进行充电。
为了简化开发过程,我们可以使用现有的开发工具和开源库。
如Keil MDK开发环境和STM32Cube库。
Keil MDK提供了强大的编译、调试和仿真功能,可以帮助我们快速开发程序。
STM32Cube库提供了丰富的驱动程序和示例代码,可以方便我们开发各种功能。
基于STM32单片机的扫地机器人设计是一个较为复杂的工程,需要考虑到硬件平台的选择、机械结构的设计以及控制程序的编写等方面。
但是通过充分利用现有的开发工具和开源库,我们可以快速实现一个功能完善的扫地机器人。
这将极大地方便人们的生活,提高家庭生活质量。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是指能够像人类一样用双脚行走的机器人,它具有非常高的技术含量和挑战性。
在现代科技的发展下,双足机器人已经被广泛应用于各种领域,例如医疗机器人、救援机器人、娱乐机器人等。
而基于STM32F407的双足机器人则是一种结合了先进的STM32F407单片机技术和双足机器人技术的新型产品,具有独特的优势和特点。
基于STM32F407的双足机器人在控制系统和运动控制方面具有很高的灵活性和稳定性。
STM32F407是意法半导体公司推出的一款高性能的32位微控制器,其主频可达168MHz,具有丰富的外设接口和强大的处理能力。
这使得基于STM32F407的双足机器人在运动控制和感知处理方面具有很强的实时性和精确性,能够更好地完成各种复杂的动作和任务。
除了运动控制系统,基于STM32F407的双足机器人还具有高度集成的传感器系统。
双足机器人需要通过传感器来感知外部环境和自身状态,以便实时调整自身姿态和动作。
而基于STM32F407的双足机器人可以通过其丰富的外设接口来连接多种传感器,例如惯性传感器、视觉传感器、力觉传感器等,实现对外部环境和自身状态的全面感知和分析。
STM32F407的强大处理能力和丰富的存储空间也为双足机器人的传感器系统提供了充足的资源和支持。
在软件开发方面,基于STM32F407的双足机器人可以充分利用STM32CubeMX和嵌入式开发工具来进行开发。
STM32CubeMX是意法半导体公司提供的一套强大的集成开发环境,可以快速生成STM32F407单片机的初始化代码和外设驱动程序,大大降低了软件开发的复杂度和工作量。
嵌入式开发工具如Keil、IAR等也为基于STM32F407的双足机器人提供了强大的编程和调试功能,使得软件开发更加高效和便捷。
基于STM32F407的双足机器人具有灵活性、稳定性和可扩展性等优势,适合用于各种复杂的环境和任务。
它不仅可以应用于工业生产和物流领域,还能在医疗护理、救援救援和娱乐娱乐领域发挥重要作用。
基于STM32F407的双足机器人
基于STM32F407的双足机器人作者:赵佩佩刘程瑞王可煦於文祚来源:《科教导刊·电子版》2020年第05期摘要本系统以STM32单片机为系统的中央控制器,将中央控制器与舵机控制器,舵机,各类传感设备及受控部件等结合,构成整个双足行走机器人,达到行走、做动作的目的。
单片机中央控制器与舵机控制器以串口通信方式实现。
硬件包括舵机控制器,按键,各种传感器和数据采集与处理单元。
软件包括单片机初始化、主程序、信号采集中断程序、通过串口通讯的接收和发送程序。
关键词双足机器人 STM32 串口通信0引言在步行方式中两足步行是最为复杂、自动化水平最高的动态系统。
本设计以对两足行走机器人的行走控制为目的,来研究两足机器人的行走过程。
为实现机器人的稳定行走本系统以STM32单片机为系统的中央控制器,将中央控制器与舵机控制器,舵机,各类传感设备及受控部件等结合,构成整个双足行走机器人,达到行走、做动作的目的。
1硬件部分双足行走机器人系统其硬件部分主要由五大部分构成:(1)控制单元。
单片机STM32是系统中控制部分关键的元件,它与控制单元组成控制部分功能。
负责整个机器行动的方式,以及处理外部环境变化的,改变机器人行走路线的任务。
(2)舵机控制模块。
主芯片为单片机STM32,模块与控制单元进行串口通信从而达到控制信息的传输。
舵机控制模块通过接收控制信息来产生控制舵机的PWM波形。
从而实现行走控制。
(3)传感器数据采集系统。
利用传感器采集信息,为机器人提供准确的外部环境数据。
控制单元通过接收的外部信息来改变控制信号,来让机器人产生行动变化。
(4)受控部件。
通过控制舵机,通过精确的角度变化让机器人完成行走的基本目的。
其主要受控于舵机模块。
通过PWM进行控制。
(5)支架。
组成机器人的躯干,搭载机器人全部电子器件。
2软件部分软件设计设计方案主要由三大部分构成:(1)主程序设计。
接收器将手柄的遥控信号通过串口发送给单片机STM32,然后由单片机对信号进行分析处理后正确识别后执行相应的中断动作子程序,输出匹配的舵机控制指令,控制机器人完成相应的姿态动作。
基于STM32单片机的双足竞走机器人设计

2022年 / 第5期 物联网技术1230 引 言随着社会和科技的进步,机器人出现在人们的视野,并逐渐代替人们服务于各行各业[1]。
日本经济产业省发布的《2012年机器人产业市场趋势》报告显示:2035年,日本机器人市场50%左右的订单来自服务业。
意味着机器人产业发展将呈现爆发态势。
我国人口红利在逐渐消失,劳动力成本上升,机器人需求增加[2-3]。
众所周知,在没有持续性研发资金供给和市场运作的背景下,国内的产业化机器人的研究还处于相当疲弱的状态,而且前景堪忧。
日本、德国、美国甚至韩国在计算机产业化领域正处于高速发展的状态,各国差距越来越大。
在当前形势下,我国应加强对机器人领域的了解和研究,为以后的发展奠定基础[4]。
本文利用STM32单片机设计了双足机器人的舵机控制系统,并对机器人的机械结构进行设计和步态规划,提高了机器人步态稳定性。
1 系统整体设计1.1 设计思路本文设计的双足机器人系统包含多个部分,主要由机械结构和控制系统组成,包括机械结构、驱动模块、传感模块和控制模块。
机械结构类似于人的骨架,它起到一个支撑平台的作用,机器人的其他部分都是在此平台基础上进行安装调试的。
控制系统类似于人的大脑,它发出相关指令和信号来控制机器人完成设计的规定动作。
双足机器人驱动是通过舵机对其进行控制的,而舵机的基本控制都是通过脉冲宽度调制(PWM )技术进行的。
为了得到舵机的精确控制效果,本文设计了一个能够输出多路PWM 信号的舵机控制器。
下面介绍双足机器人的步态规划。
双足机器人的特点是具有多个关节、多个驱动器、多约束等,因此机器人行走时的步态规划控制难度较大,规划机器人步态使其稳定行走是本文设计的双足机器人的关键。
通过大量研究和分析人类行走方式以及翻跟斗的动作,设计出了双足机器人的机械结构并建立了简化运动的模型;在此工作基础上,根据ZMP 原理完成机器人的步态设计和规划,通过编程指令控制实现了一系列的动作,如前后移动、左右转动、前后翻滚等动作,最后对步态进行可行性测试。
基于STM32的智能服务型多功能多足机器人
1引言面对科技迅速发展的当今社会,所谓的高科技还未真正解决那些弱势群体的生活问题:空巢老人缺少子女的陪伴,日常生活需要有人照顾;盲人出行时需要靠外界传递导航信息等。
考虑到这些细节,我们由此引发了设计理念:设计一款多功能的服务型多足机器人,在那些弱势人群需要帮助时及时做出相应的救援措施,以及陪伴他们的日常生活,做他们的贴身小管家。
此款机器人利用STM32单片机作为核心控制单元,结合多种传感器以及舵机实现它的多功能工作状态,在轻便小巧的外型下蕴涵多种智能服务模式。
服务型机器人可以根据人类的意愿来执行任务如今空巢老人的生活问题已经非常严重,无人陪伴使得他们的安全极其令人担忧。
残障人士的生活不便,也成为人人担忧的社会问题。
此款机器人不但可以成为老人们忠实的伙伴,还可以依照他们的需求,做一些诸如打扫卫生、生活小提醒等服务,可以很好地满足他们生活中的需求;还可以在他们遇到危险时展开紧急救援;本设计安装了红外报警系统,保护了个人安全。
同时整个系统利用太阳能电池板作为能源提供装置,不仅可以实现整个系统的持续运转,更能起到节约能源以及绿色环保的作用。
2总体设计2.1系统方案分析硬件方面采用STM32单片机作为控制器,芯片采用型号为STM32F103ZET6型芯片。
通过伺服电机、光照度传感器、语音模块、烟雾传感器等实现对机器人的控制,并且将需要的数据在TFT 彩屏上显示。
程序设计开发使用常用的STM32系列开发软件Keil5。
使用2.8寸TFT 彩屏显示有效数据。
整个软件划分为若干模块,分别调试,最后集成。
综合考虑此方案可行。
2.2设计不足及解决方法传统的8位51单片机没有足够的中断,处理能力也相对较差,无法驱动多个传感器。
为了达到设计需要,选择了32位的STM32F103ZET6单片机[1],但增加了开发成本。
在此次设计制作中完全可以使用成本较低、性能较差的STM32F103C8T6型芯片,更为廉价的也可以。
在为机器人提供动力方面,我们综合多个方面最终决定使用伺服电机,此电机价格昂贵,但我们经测试发现很适合机器人的结构,并便于拆装。
双足机器人

双足机器人作者:张葛杨奕李恋来源:《科学导报·学术》2018年第17期摘要:本作品研究了基于STM32F407的双足机器人,此机器人采用了U型梁、多个180°数字舵机、多功能支架等构成了多自由度的机械结构,通过舵机驱动模块来控制舵机旋转从而实现机器人的稳定行走,以及模拟人类做一些简单的动作。
本作品结构相对简单、安装快捷调试方便,且试验结果显示,该步行机器人能够实现平稳的行走,以及模拟人做一些较为复杂的动作,且性能优越,应用广泛。
关键词:双足机器人舵机驱动远程控制引言随着科学技术的发展以及人类对未知领域探索的加速,机器人的应用越来越广泛。
一方面,机器人能取代人类完成一些机械繁重的工作,让人类从重复而无意义的体力劳动中解放出来;另一方面,机器人能代替人类完成具有危险性的任务,让人类减少生命安全财产的损失。
种种方面使得人类对机器人的需求越来越强烈,故研究一种步行的机器人显得尤为重要。
在机器人的行动方式中双足步行是自动化程度最高、最为复杂的动态系统。
本作品主要研究双足机器人的行走过程。
通过对外界环境的判断让机器人处理一些简单的应变,为机器人在以后更为复杂的工作环境稳定工作打下基础。
因此双足机器人具有十分重大的研究价值和研制意义。
1总体方案1.1硬件方面1.1.1控制部分单片机是系统中控制部分最为关键的元件,其主要控制整个机器人的行动方式,处理外部环境的变化,以及改变机器人行走的路线。
系统还包括发射机电路和接收机电路,无线数据发射接收电路。
其中,发射机电路采用多个可变电位器将控制者的控制动作转变为模拟控制信号,经发射端的单片机将输入的多路模拟信号经过A/D转换后变为数字信号,再进行编码并由串行口发射;接收机电路的任务则是把接收到的信号进行适当放大并从中解调出编码信号,然后通过接收端的单片机将该信号转换成相应的舵机控制信号和电动机驱动控制信号,从而完成各个舵机的旋转以完成双足机器人不同的动作和姿态。
基于STM32F407的双足机器人
基于STM32F407的双足机器人双足机器人是一种模仿人类步行方式的机器人,它的动作更加灵活自然,能够适应各种复杂的环境和地形。
在现代科技的发展下,双足机器人已经被广泛应用于教育、娱乐和工业等领域。
而基于STM32F407的双足机器人则是一种新型的机器人,它利用STM32F407单片机搭建控制系统,具有高性能和低功耗的特点,成为了双足机器人中的一个重要组成部分。
一、STM32F407STM32F407是意法半导体公司推出的一款高性能ARM Cortex-M4内核的微控制器,具有丰富的外设和强大的性能优势。
它集成了丰富的外设,包括ADC、DAC、PWM、USART、I2C、SPI、CAN等,适用于各种复杂的应用场景。
STM32F407还具有低功耗和高性能的特点,能够满足双足机器人对于控制系统的要求。
基于STM32F407的双足机器人控制系统由STM32F407单片机、电机驱动器、传感器模块、姿态估计算法等组成。
STM32F407单片机作为控制核心,负责控制双足机器人的动作、平衡和姿态调整等功能。
电机驱动器则用于控制双足机器人的步态和速度,传感器模块用于感知周围环境,姿态估计算法用于实时估计双足机器人的姿态和状态。
1. 高性能:基于STM32F407的双足机器人具有较高的性能优势,能够实现复杂的控制算法和运动规划,从而实现更加灵活和稳定的步行动作。
2. 低功耗:STM32F407单片机具有低功耗的特点,能够为双足机器人提供可靠的电力支持,从而延长机器人的工作时间。
3. 灵活性:基于STM32F407的双足机器人具有较高的灵活性和可扩展性,能够根据不同的应用场景进行自由组合和调整,从而适应不同的任务需求。
1. 教育领域:基于STM32F407的双足机器人可以作为教育工具,用于教学生学习机器人控制和运动规划等知识,激发学生对科学和技术的兴趣。
2. 娱乐领域:基于STM32F407的双足机器人可以作为娱乐机器人,进行各种有趣的动作表演和互动,提供新颖的娱乐体验。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是仿生型机器人的一种,与人类步态较为接近,因此在人机交互、服务机器人、医疗等领域有广泛应用。
本文介绍了基于STM32F407的双足机器人设计。
一、硬件设计1. 硬件原理图整个系统由主控板、电机驱动板、按键板、电量显示板、调试串口板、电源板等组成,如下图所示。
2. 材料清单双足机器人的材料清单主要包括:• 主控芯片:STM32F407• 电机驱动芯片:L298N• 步进电机:NEMA 17• 电源:12V、5A• 机壳:3D打印1. 系统框架整个系统采用嵌入式操作系统RTOS实现,用户可以通过触摸屏或按键操作控制双足机器人的移动、转向等动作。
2. 程序流程程序流程图如下图所示。
3. 关键算法(1)PID控制算法采用PID控制算法控制步进电机的转速,保证双足机器人移动的稳定性和平滑性。
(2)三关节反向解算算法该算法用于计算双足机器人每个关节的角度,使之达到期望角度,从而实现机器人的运动。
(3)Kinect传感器数据处理算法通过Kinect传感器获取地面深度数据,根据机器人的移动数据、机构参数、重心位置等计算机器人的倾角、速度等数据,从而实现双足机器人的平衡控制。
三、实验结果经实验,基于STM32F407的双足机器人控制系统工作稳定,运动平滑,靠墙时能自动保持平衡,转向时稳定性高,可靠性强。
四、结论本设计基于STM32F407的双足机器人控制系统,实现了双足机器人的运动控制。
通过Kinect传感器获取地面深度数据,根据机器人的移动参数计算机器人的倾角、运动速度等,从而实现机器人的平衡控制。
该设计为双足机器人系统提供了一个较为稳定、高可靠性的控制平台,并为双足机器人的应用提供了有力支持。
基于STM32的双足机器人控制系统设计与实现

电子技术• Electronic Technology84 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】双足机器人 姿态传感器 舵机 姿态修正 测距机器人是集众多高新领域于一身的高技术产物,由于技术的不断成熟,机器人的应用领域更加广泛,发挥越来越重要的作用。
本文采用STM32单片机作为核心处理器,为姿态传感器MPU050、舵机及超声波测距传感器提供良好的控制平台。
1 系统总体设计该款机器人各关节的运动均由舵机实现,按照舵机所处位置将舵机分为四组,分别对应机器人的四肢,便于后期编程和调试。
上位机通过无线串口向机器人主控制器发出指令,主控制器判断指令后控制对应舵机协调转动实现机器人直行、转弯、后退等一系列动作。
在机器人运动的同时,姿态传感器MPU6050实时收集机器人的姿态数据并反馈到主控制器,主控制器对反馈回来的数据经过解算得到机器人的俯仰角、横滚角、航向角;根据三个姿态角的大小判明机器人运动的方向和姿态,对机器人运动路线进行修正和姿态的调节;并通过无线串口将信息发送到上位机,使操作人员及时了解运动状态,从而增强运动的稳定性;当前方有障碍物时,超声波传感器测出障碍物的距离,当距离超过预设的安全距离时,机器人将执行避障程序,绕开障碍物,确保能够继续运行。
2 硬件组成及功用系统的硬件部分主要由动力系统,控制模块,传感器模块,通信模块,电源模块等组成。
具体如下:2.1 主控制器控制系统采用STM32F103C8T6芯片核心板作为主控制器。
该芯片是一款基于ARM Cortex-M 内核STM32系列的32位的微控制器,运行频率高达72MHZ ,工作电压基于STM32的双足机器人控制系统设计与实现文/张冬冬2V~3.6V ,可以输出多路PWM 方波,能够支持多串口同时通信,体积小巧,重量轻;能够较好满足要求。
2.2 数字舵机LD-220MG数字舵机LD-220MG 主要由马达、控制电路、减速齿轮等组成;相比于传统舵机具有响应速度快、控制精度高、线性度好等优势;同时该舵机扭矩较大,能够为双足机器人运动提供充足的动力。
基于STM32的双足机器人运动控制系统设计
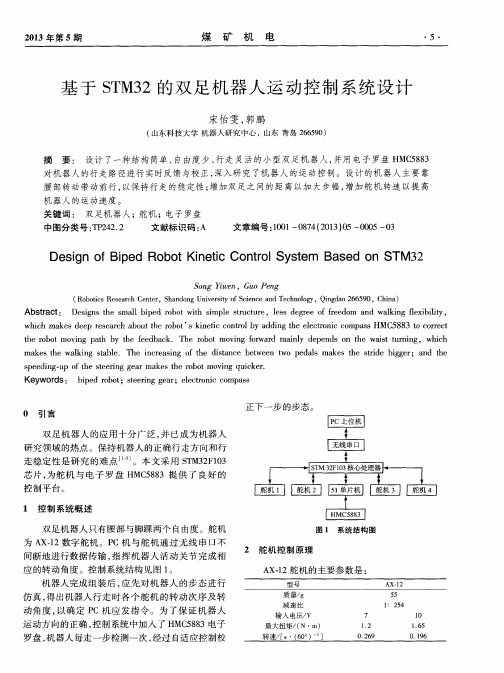
ma k e s t h e wa l k i n g s t a b l e .T h e i n c r e a s i n g o f t h e d i s t a n c e b e t w e e n t wo p e d a l s ma k e s t h e s t r i d e b i g g e r ;a n d t h e
whi c h ma k e s de e p r e s e a r c h a b o u t t h e r o b o t ’ S k i n e t i c c o n t r o l b y a d d i n g t h e e l e c t r o n i c c o mp a s s HM C 58 8 3 t o c o r r e c t t h e r o bo t mo v i n g pa t h b y t h e f e e d ba c k. Th e r o bo t mo v i ng f o r wa r d ma i n l y d e p e n d s o n t h e wa i s t t u r ni n g,wh i c h
2 舵机 控 制原理
A X. 1 2舵 机 的主要 参数是 :
仿真 , 得 出机器 人 行 走 时 各 个 舵 机 的转 动 次 序 及 转 动角 度 , 以确 定 P c机 应 发 指 令 。为 了保 证 机 器 人 运 动 方 向的正 确 , 控制 系统 中加 入 了 HMC 5 8 8 3电子 罗盘 , 机 器人 每走 一步 检测 一次 , 经 过 自适应 控 制校
机器 人 的运 动速度 。
关键 词 : 双足 机器 人 ;舵机 ;电子 罗盘
中图分 类号 : T P 2 4 2 . 2 文献标识 码 : A 文章编号 : 1 0 0 1 — 0 8 7 4 ( 2 0 1 3 ) 0 5一 O O O 5— 0 3
基于STM32的双足机器人控制系统的研究

基于STM32的双足机器人控制系统的研究双足机器人是一种仿生机器人,可以模拟人类的步行动作,并具备移动和平衡能力。
为了实现双足机器人的控制,需要一个强大的控制系统来处理传感器数据并生成相应的控制指令。
在基于STM32的双足机器人控制系统的研究中,主要包括以下几个方面:1.传感器数据获取与处理:双足机器人需要使用多种传感器来获取关于环境和自身状态的数据,以便进行相应的控制。
如惯性测量单元(IMU)、压力传感器、编码器等。
通过使用STM32微控制器,可以使用其丰富的通用输入/输出接口和模拟输入/输出接口,轻松地与各种传感器进行通信并获取数据。
然后通过处理这些数据,可以计算机器人的姿态、速度、加速度等状态信息。
2.动作控制算法:为了保持双足机器人的平衡和稳定,需要开发相应的动作控制算法。
这些算法根据传感器数据分析机器人的状态,并生成相应的控制指令来调整机器人的姿态和步行动作。
例如,使用PID控制器来调整姿态,使用预测控制算法来计算步行动作。
在STM32微控制器上实现这些算法,可以快速和高效地生成控制指令。
3.控制指令生成与执行:在STM32微控制器中,可以通过编程将控制指令转换为电机和执行器的操作信号。
这些信号可以通过PWM信号、模拟输出、脉冲信号等方式传递给电机驱动器、执行器等设备。
通过这些设备,可以控制机器人的运动和姿态。
4.通信与交互:为了实现与外部设备的通信和交互,可以使用STM32微控制器的通信接口,如串口、CAN总线等。
通过这些接口,可以将双足机器人的数据发送给外部设备进行分析和处理,也可以接收外部设备的指令进行控制。
同时,也可以将控制系统与计算机进行连接,通过编程界面实现对机器人的监控和控制。
总之,基于STM32的双足机器人控制系统的研究可以实现对机器人的感应、动作控制和通信交互等功能。
通过充分利用STM32微控制器的高性能和丰富的接口资源,可以实现高效、精确和稳定的控制系统,从而提升双足机器人的性能和应用范围。
基于STM32双足竞步机器人的研究与设计
基于STM32双足竞步机器人的研究与设计作者:卢士林李彩霞张奎庆段忠臣来源:《智能计算机与应用》2016年第05期摘要:随着工业的不断发展和科技的不断进步,智能机器人已逐步应用到各个生产领域,并促进机械、农业、家具等向智能化方向发展。
为此,设计了双足竞步机器人。
该机器人将先进的自动控制系统与机械设备的有效结合,并通过STM32单片机输出pwm波形来控制舵机运动,从而实现机器人的前进、后退、转弯等多个动作。
而且本系统的功能还能延伸运用,可以很好地用于其它相关领域,具有一定的扩展应用价值和意义。
关键词:双足;竞步;自控;舵机中图分类号:TP368 文献标识码:AResearch and design of biped walking robot based on STM32LU Shilin, LI Caixia, ZHANG Kuiqing, DUAN Zhongchen(School of mechanical and electrical engineering, Dezhou University, Dezhou Shandong 253023,China)Abstract: with the continuous development of science and technology, intelligent robot has been gradually applied to all areas of production, and promotes the intelligent development of machinery, agriculture, furniture etc. To this end, the paper proposes the design of a biped walking robot. The robot researches the effective combination of the advanced automatic control system and mechanical equipment, and concretely applies PWM waveform output of the STM32 MCU to control steering gear, so as to realize stepping forward/backward, turning and other movements of the robot. And the function of the system could also be extended for use, which can be well used in other related areas, and has a certain value and significance of the expanding application.Key words: double feet; step by step;automatic control; steering gear0引言双足竞步机器人是足式机器人中自动化程度最高、设计复杂测评指数获居前茅的一款机器人。
基于STM32F407的轮式机器人定位控制系统的设计

基于STM32F407的轮式机器人定位控制系统的设计作者:孙猛猛杨明辉张玉炳万林来源:《中国新通信》2015年第15期【摘要】传统的双码盘和陀螺仪定位系统由于受到地面环境因素的影响,导致其定位精度不高。
本文提出了一种基于STM32F407ZGT6的轮式机器人定位控制位系统的设计方案,在传统的双码盘和陀螺仪的定位系统中加入了激光雷达和DT50激光测距仪作为辅助定位手段。
采用STM32F407ZGT6作为本控制系统的核心处理器,并且给出了相关部分的硬件设计和系统总体的软件架构。
从测试结果表明,该定位系统完成了轮式机器人的定位,完全达到了预期设计要求。
【关键词】轮式机器人 STM32F407ZGT6 定位系统激光雷达激光测距仪一、概述轮式机器人在应用普及的过程中,由于地面环境的复杂性、运动路径不固定等问题使得轮式机器人的定位成为其应用普及的关键性问题。
针对该问题,本文提出了一种基于STM32F407的定位控制系统设计方案,该方案综合了嵌入式控制技术、传感器技术及通讯技术,检测与控制轮式机器人的运动状态,实现了轮式机器人的定位功能。
二、定位系统总体方案设计在改定位系统中,主控器通过PWM脉宽调制技术控制电机驱动模块,通过定位板模块给出机器人确定的出发位置,通过辅助定位模块对机器人的位置进行必要的坐标纠正。
在机器人运行的过程中通过无线通讯模块将机器人实时的位置坐标传到上位机,用户可通过上位机操作界面对机器人进行实时的操作与监测。
整个硬件框图由调试器下载口、电机驱动部分、电源部分、晶振部分、主控板、定位板模块、主控板、辅助定位板模块1和辅助定位板模块2组成。
三、关键部分硬件电路设计3.1关键电子元器件选型主控板芯片选型:要满足多路PWM输出口、I/O中断口、多种通讯功能包括CAN通信和串口通信,因此选用ST公司的STM32F407ZGT6。
定位板模块芯片选型:要满足多路脉冲信号输入、I/O口、多种通讯功能包括CAN通信和SPI通信,因此选用ST公司的STM32F405RGT6。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是一种仿生机器人,它具有类似人类双足行走的能力,可以在复杂的地形环境中自主行走、保持平衡。
随着科技的不断发展,双足机器人在工业生产、救灾救援、服务业等领域有着广泛的应用前景。
本文将介绍基于STM32F407的双足机器人的设计与制作过程。
一、STM32F407介绍STM32F407是意法半导体公司推出的一款32位高性能微控制器,它采用ARM Cortex-M4内核,主频可达168MHz,具有丰富的外设资源和强大的计算能力。
STM32F407具有丰富的接口,如通用并行接口(GPI)、通用同步/异步串行接口USART)、通用串行接口GUS)、SPI、I²C、SDIO、ADC等,可以满足双足机器人在控制、通信、传感器等方面的需求。
二、双足机器人的设计思路双足机器人的设计思路是模仿人类行走的方式,通过不断调整身体姿态和腿部关节的运动来保持平衡。
在双足机器人的设计中,需要考虑机械结构、动力系统、传感系统和控制系统等多个方面。
在本设计中,我们采用STM32F407作为控制核心,利用其丰富的接口资源和强大的计算能力,配合相关模块和传感器,完成双足机器人的设计与制作。
三、双足机器人的硬件设计1. 机械结构设计双足机器人的机械结构设计是整个项目的基础,它直接影响机器人的稳定性和可行性。
我们采用了轻质材料制作机械结构,并通过CAD软件进行设计,确保结构的合理性和稳定性。
2. 动力系统设计双足机器人的动力系统设计包括电机、电机驱动器、电源系统等部分。
我们选用了高效的直流无刷电机作为动力源,并配合合适的电机驱动器和电源系统,保证机器人的稳定性和运动性能。
3. 传感系统设计双足机器人的传感系统设计包括姿态传感器、接触传感器、视觉传感器等部分。
在本设计中,我们利用了三轴加速度计和陀螺仪传感器来获取机器人的姿态信息,利用触摸传感器来检测机器人的接触状态,同时结合视觉传感器进行环境感知和障碍物识别。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是一种仿生机器人,具有双足步行能力,能够模拟人类的步态和动作。
它具有很高的灵活性和稳定性,可以适应不同的地形和环境。
基于STM32F407的双足机器人具有先进的控制系统和智能算法,能够实现复杂的动作和任务。
本文将介绍基于STM32F407的双足机器人的设计原理、控制系统和应用场景。
一、设计原理基于STM32F407的双足机器人主要由机械结构、传感器系统、控制系统和动力系统四个部分组成。
机械结构是双足机器人的骨架,它决定了机器人的外形和运动方式。
传感器系统用于感知环境和身体状态,包括视觉传感器、惯性传感器、力传感器等。
控制系统是双足机器人的大脑,它接收传感器数据并计算出相应的动作指令。
动力系统则负责执行控制系统的指令,驱动机器人进行运动。
1. 高性能处理器:STM32F407是一款高性能的32位微控制器,具有丰富的外设和强大的计算能力,能够满足双足机器人复杂的控制算法和实时运动要求。
2. 多轴驱动:双足机器人需要精确的多轴驱动来实现步行和平衡,STM32F407提供了丰富的PWM输出通道和高速定时器,能够满足机器人的驱动需求。
3. 实时通信:双足机器人需要实时地接收和发送数据,与外部设备进行通信。
STM32F407具有丰富的通信接口和高速外设,能够满足双足机器人的通信需求。
基于STM32F407的双足机器人的设计原理可以满足机器人的高性能计算和实时控制要求,为机器人的稳定步行和复杂动作提供了坚实的技术基础。
二、控制系统基于STM32F407的双足机器人的控制系统包括感知、规划和执行三个部分,实现了双足机器人的全面控制。
感知部分主要通过传感器系统获取环境信息和身体状态,包括视觉、力觉、陀螺仪等传感器,将感知到的数据传输给控制系统。
规划部分主要通过控制算法对感知数据进行处理和分析,得出接下来的运动控制指令。
执行部分主要通过动力系统执行规划好的运动控制指令,控制机器人进行步行和平衡。
基于STM32F407的双足机器人

基于STM32F407的双足机器人随着机械化领域的发展,人们在机器人技术领域不断地探索和研究。
而双足机器人因为其与人类相似的行动方式和可塑性,成为了研究的热点之一。
在实现双足机器人的过程中,控制系统是至关重要的一环。
而基于STM32F407的双足机器人控制系统是双足机器人最为常用的一种控制系统之一。
STM32F407是意法半导体推出的一款具有性能出色的单片机,其拥有许多核心的功能,包括高速的ADC转换、高速PWM输出、高速定时器、多个中断向量等特点。
这使得其能够满足双足机器人控制系统的要求。
在基于STM32F407的双足机器人控制系统中,CPU会快速地执行程序,并通过定时器和PWM控制双足机器人的运动。
而双足机器人的传感器会向STM32F407单片机发送数据,并通过I2C总线将数据传回至控制系统,以实现更为准确的控制。
在双足机器人的动作控制方面,STM32F407单片机可以通过PID算法实现。
PID算法是目前最常用的控制算法之一,它可以利用反馈机制来调整控制系统的输出。
通过传感器的数据输入,STM32F407单片机可以根据控制系统的设定输出控制信号来控制双足机器人的动作。
在双足机器人跨步、前进、转弯等动作中,PID算法可以准确地控制机器人的姿态和运动。
在控制系统的实现过程中,还需要利用C语言和Assembly语言编程来实现CPU快速运算。
通过C语言进行控制系统的高层次编程,而使用Assembly语言则可以实现CPU的底层运算,以保证控制系统的运行速度。
总的来说,基于STM32F407的双足机器人控制系统是一种稳定可靠、性能出色的控制系统。
它可以实现高效的数据采集、运算速度快的PID算法控制、精确的动作控制等功能。
这种控制系统有望成为未来双足机器人研究中的重要组成部分,为双足机器人的实际应用奠定坚实基础。
基于STM32F407单片机的社区智能管家机器人设计

基于STM32F407单片机的社区智能管家机器人设计作者:胡文峰王昊陈颖王鑫刘佳莹林盛昌来源:《无线互联科技》2021年第19期摘要:文章设计了基于STM32F407单片机控制的社区智能管家机器人。
该机器人通过语音识别和蓝牙控制,语音识别与语音回复系统可以对用户所发出的命令进行识别与回复,也可通过蓝牙连接,从用户端App下达指令;还可以帮助物业做到对社区住户的体温测量、记录与消杀工作。
关键词:机器人;社区服务;语音控制回复;蓝牙0 引言随着人工智能的发展,智能机器人的应用越来越普遍,一些简单而实用的送料家居机器人、自动扫地机器人、机器人吸尘器等逐渐出现在高端智能家居生活中。
未来智能家居机器人在人们的生产、生活中将起到巨大作用,它大大提高了劳动生产效率,提高了人们的生活水平。
2020年新型冠状病毒的爆发,测量、记录体温和每日的消毒工作尤为重要,人们希望用机器人工作取代疫情期间具有一定接触风险的人工防疫工作,并在日后社区健康安全愈受重视的情况下,智能化、高效化地采集社区住户的健康信息,建立健康信息库,精准找出问题,快速采取措施,及时维护社区居民健康安全,提高社区居民生活质量。
本团队设计的这款社区管家机器人可以执行帮助物业定时测量住户体温、帮助住户打扫卫生并给予消毒等健康卫生措施任务。
主要解决如下问题:非接触测量体温、收集住户体温等基本的健康信息、打扫消毒。
1 设计原理1.1 工作原理该设备是利用语音识别与语音回复系统对用户所发出的命令进行识别与回复,尽可能地利用语音功能来降低使用的操作难度。
该设备能够对接收到的不同指令进行识别与划分,自行执行相应的动作,通过红外测温模块与电机驱动模块,实现在社区中帮助物业定时测量住户体温,帮助住户打扫卫生并给予消毒等安全措施的功能。
该设备可通过蓝牙模块连接用户端反馈健康数据信息,录入健康信息库,智能、高效地维护健康信息。
1.2 系统硬件设计1.2.1 语音识别与语音回复系统语音识别与语音回复系统由单片机、语音识别模块以及语音回复模块组成,选用的单片机型号为STM32F407;语音识别模块为LD3320语音识芯片;语音回复模块为MP3模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于STM32F407的双足机器人
双足机器人是一种模拟人类行走的机器人,可以实现步行、跑步、跳跃等动作。
本文
将介绍基于STM32F407的双足机器人的设计原理和实现过程。
我们需要设计机器人的硬件部分。
双足机器人需要具备平衡能力和步行能力。
为了实
现这一目标,我们需要在两条腿上安装舵机和传感器。
舵机可以控制腿部的运动,传感器
可以检测机器人的倾斜角度和腿部的位置。
基于STM32F407的双足机器人主控制器需要具备较强的计算能力和控制能力。
STM32F407是一款高性能的ARM Cortex-M4微控制器,具有高速的运算能力和多种外设接口。
我们可以将STM32F407作为机器人的主控制器。
接下来,我们需要设计机器人的软件部分。
双足机器人的软件主要包括运动控制算法
和姿态控制算法。
运动控制算法用于控制舵机的转动角度,从而实现机器人的步行动作。
姿态控制算法用于保持机器人的平衡,根据传感器的测量值进行控制。
在编程上,我们可以使用Keil MDK进行开发。
Keil MDK是一款功能强大的集成开发环境,可以进行嵌入式软件的开发和调试。
我们可以使用C/C++语言编写机器人的软件,利
用STM32F407的外设库函数进行控制。
我们需要对机器人进行测试和调试。
在测试阶段,我们可以通过连接电脑和机器人,
通过串口通信进行调试。
我们还可以使用仿真软件进行虚拟测试,以提前检测和解决潜在
的问题。
基于STM32F407的双足机器人可以应用于多个领域,例如教育、娱乐和服务机器人等。
通过不断改进和优化,双足机器人的性能和功能将得到进一步提升,为人们带来更多便利
和乐趣。
基于STM32F407的双足机器人是一种具有广泛应用前景的机器人系统。
它结合了硬件
设计和软件算法,能够实现人类步行动作,并具备平衡能力。
这为机器人技术的发展和应
用带来了更多可能性。