【CN109507687A】一种搜索跟踪一体化装置及其实现方法【专利】
【CN109978779A】一种基于核化相关滤波方法的多目标跟踪装置【专利】

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910182414.3(22)申请日 2019.03.12(71)申请人 东南大学地址 210096 江苏省南京市玄武区四牌楼2号(72)发明人 杨俊 乔鹏宇 李世华 刘向阳 冒建亮 万潇月 (74)专利代理机构 南京众联专利代理有限公司32206代理人 周蔚然(51)Int.Cl.G06T 5/00(2006.01)G06T 7/168(2017.01)G06T 7/194(2017.01)H04L 29/06(2006.01)H04N 5/232(2006.01)G06F 17/16(2006.01)(54)发明名称一种基于核化相关滤波方法的多目标跟踪装置(57)摘要本发明公开了一种基于核化相关滤波方法的多目标跟踪装置,多目标跟踪装置由机载光电平台硬件和目标跟踪软件组成,软件部分分为惯性稳定系统和视觉成像系统;硬件部分包含电源、平台组件、控制器、驱动器、电机、传感器、计算机等,主要构建平台外框并为软件系统提供传感器与驱动支持。
惯性稳定系统,通过控制电机运作以控制摄像头的转动,从而使得目标坐标位置始终保持在视频图像中心。
视觉成像系统,本发明的图像处理方法建立在核化相关滤波的基础上,设置了预处理模块,能够捕获更为准确的目标信息,提升跟踪精度;并且增加循环处理模块,能有效地解决多目标跟踪的问题。
权利要求书1页 说明书4页 附图3页CN 109978779 A 2019.07.05C N 109978779A权 利 要 求 书1/1页CN 109978779 A1.一种基于核化相关滤波方法的多目标跟踪装置,其特征在于:包括机载光电平台硬件和目标跟踪软件:硬件部分即为机载光电平台,包含电源、平台组件、控制器、驱动器、电机、传感器、计算机;其中电源为控制器和驱动器提供稳定的5V 电压;平台组件作用是搭建平台外框,给其他硬件提供载体;为软件系统提供传感器与驱动支持;电机为方向轴和俯仰轴提供旋转动力,带动视轴转动;控制器与驱动器控制电机转速;传感器包括陀螺、编码盘、摄像头,为软件部分提供必要的信息;计算机作为视觉成像系统的调试运作平台,进行图像处理、目标跟踪算法的运算工作;软件部分分为惯性稳定系统和视觉成像系统,所述惯性稳定系统用来保持目标中心点始终同视场中心点重合;视觉成像系统用来定位以及跟踪目标。
一种快速指向与跟踪装置及方法[发明专利]
![一种快速指向与跟踪装置及方法[发明专利]](https://img.taocdn.com/s3/m/26f040a66aec0975f46527d3240c844769eaa0b7.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201710305175.7(22)申请日 2017.05.03(71)申请人 长春理工大学地址 130022 吉林省长春市卫星路7186号科技大厦B座1603室(72)发明人 赵馨 张雷 宋延嵩 刘云清 董科研 (74)专利代理机构 吉林长春新纪元专利代理有限责任公司 22100代理人 王薇(51)Int.Cl.G01S 19/49(2010.01)G05D 3/10(2006.01)(54)发明名称一种快速指向与跟踪装置及方法(57)摘要本发明涉及一种快速指向与跟踪装置,其特征在于:光学系统、滤光片、CCD相机、第一GPS天线、第二GPS天线、GPS/INS主机顺次固联在连接板上面;观靶镜固联在连接板下面;连接板安置在赤道仪上;赤道仪安置在支架上;其中CCD相机通过线缆与计算机连接;第一GPS天线通过线缆与GPS/INS主机连接;第二GPS天线通过线缆与GPS/INS主机连接;GPS/INS主机通过线缆与计算机连接;赤道仪通过线缆与计算机连接。
其能完成对选定恒星或目标的快速指向与高精度跟踪,跟踪装置借助双天线GPS/INS组合导航与定位系统提供的位置与姿态角信息实现赤道仪极轴对准。
使用卡尔曼滤波技术将光电成像跟踪系统与赤道仪跟踪系统组合到一起应用,使系统具有较强的抗干扰能力。
权利要求书1页 说明书3页 附图1页CN 107121691 A 2017.09.01C N 107121691A1.一种快速指向与跟踪装置,由计算机、光学系统、滤光片、CCD相机、第一GPS天线、第二GPS天线、GPS/INS主机、连接板、观靶镜、赤道仪、支架构成;其特征在于:光学系统、滤光片、CCD相机、第一GPS天线、第二GPS天线、GPS/INS主机顺次固联在连接板上面;观靶镜固联在连接板下面;连接板安置在赤道仪上;赤道仪安置在支架上;其中CCD相机通过线缆与计算机连接;第一GPS天线通过线缆与GPS/INS主机连接;第二GPS天线通过线缆与GPS/INS主机连接;GPS/INS主机通过线缆与计算机连接;赤道仪通过线缆与计算机连接。
一种跟踪方法及装置[发明专利]
![一种跟踪方法及装置[发明专利]](https://img.taocdn.com/s3/m/a6ce706e2f3f5727a5e9856a561252d381eb204b.png)
专利名称:一种跟踪方法及装置专利类型:发明专利
发明人:张伟
申请号:CN201780004695.2申请日:20170525
公开号:CN108496138B
公开日:
20220422
专利内容由知识产权出版社提供
摘要:一种跟踪方法,应用于无人机,所述无人机包括第一云台(11)、第二云台(12)、第一相机(13)和第二相机(14),所述第一云台用于控制所述第一相机的姿态,所述第二云台用于控制所述第二相机的姿态,所述方法包括:利用所述第一相机获取目标对象的第一特征信息(201);利用所述第二相机获取所述目标对象的第二特征信息(202);根据所述第一特征信息以及所述第二特征信息中的至少一个对所述目标对象进行跟踪(203)。
可以在一定程度上提高跟踪性能以及扩大跟踪适用范围。
申请人:深圳市大疆创新科技有限公司
地址:518057 广东省深圳市南山区高新区南区粤兴一道9号香港科大深圳产学研大楼6楼
国籍:CN
代理机构:广州三环专利商标代理有限公司
更多信息请下载全文后查看。
【CN109819757A】一种联合收获机的收获边界定位跟踪系统及方法【专利】
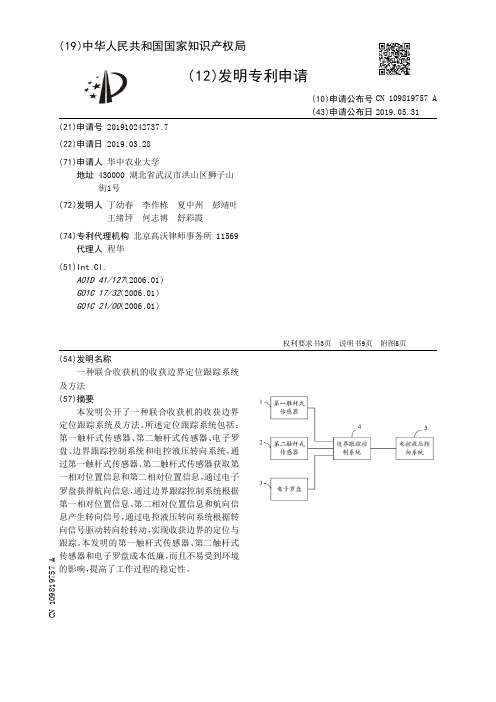
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910242737.7(22)申请日 2019.03.28(71)申请人 华中农业大学地址 430000 湖北省武汉市洪山区狮子山街1号(72)发明人 丁幼春 李作栋 夏中州 彭靖叶 王绪坪 何志博 舒彩霞 (74)专利代理机构 北京高沃律师事务所 11569代理人 程华(51)Int.Cl.A01D 41/127(2006.01)G01C 17/32(2006.01)G01C 21/00(2006.01)(54)发明名称一种联合收获机的收获边界定位跟踪系统及方法(57)摘要本发明公开了一种联合收获机的收获边界定位跟踪系统及方法。
所述定位跟踪系统包括:第一触杆式传感器、第二触杆式传感器、电子罗盘、边界跟踪控制系统和电控液压转向系统,通过第一触杆式传感器、第二触杆式传感器获取第一相对位置信息和第二相对位置信息,通过电子罗盘获得航向信息,通过边界跟踪控制系统根据第一相对位置信息、第二相对位置信息和航向信息产生转向信号,通过电控液压转向系统根据转向信号驱动转向轮转动,实现收获边界的定位与跟踪。
本发明的第一触杆式传感器、第二触杆式传感器和电子罗盘成本低廉,而且不易受到环境的影响,提高了工作过程的稳定性。
权利要求书3页 说明书9页 附图5页CN 109819757 A 2019.05.31C N 109819757A权 利 要 求 书1/3页CN 109819757 A1.一种联合收获机的收获边界定位跟踪系统,其特征在于,所述定位跟踪系统包括:第一触杆式传感器、第二触杆式传感器、电子罗盘、边界跟踪控制系统和电控液压转向系统;所述第一触杆式传感器安装于联合收获机的割台的左侧分禾器的前部,所述第二触杆式传感器安装于焊接在所述联合收获机的底盘右侧的横梁上;所述电子罗盘和所述边界跟踪控制系统安装于所述联合收获机的驾驶室内;所述电控液压转向系统的活塞杆与所述联合收获机的转向轮连接;所述第一触杆式传感器与所述边界跟踪控制系统连接,所述第一触杆式传感器用于采集所述联合收获机与田间秸秆的第一相对位置信息,并将所述第一相对位置信息发送给所述边界跟踪控制系统;所述第二触杆式传感器与所述边界跟踪控制系统连接,所述第二触杆式传感器用于采集所述联合收获机与田间秸秆的第二相对位置信息,并将所述第二相对位置信息发送给所述边界跟踪控制系统;所述电子罗盘与所述边界跟踪控制系统连接,所述电子罗盘用于获取所述联合收获机的航向信息,并将所述航向信息发送给所述边界跟踪控制系统;所述边界跟踪控制系统与所述电控液压转向系统连接,所述边界跟踪控制系统用于根据所述第一相对位置信息、所述第二相对位置信息和所述航向信息产生转向信号,并将所述转向信号发送给所述电控液压转向系统;所述电控液压转向系统用于根据所述转向信号驱动所述转向轮转动,进行边界的跟踪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
括二维伺服转台、成像探测模块、搜索模块和控 制模块;二维伺服转台用于带动搜索模块和成像 探测模块执行沿方位轴和俯仰轴的转动;成像探 测模块用于实现对空中飞行目标的实时成像探 测并向控制模块发送图像数据;搜索模块用于执 行对动态飞行目标的搜索功能并将搜索到的目 标数据信息传递给控制模块;控制模块用于接收 搜索模块发送的目标数据信息并传递给二维伺 服转台 ,以 及接收并处理成像探测模块发送的图 像数 据 ,解算指向 偏差并 传递给二维 伺服转台 。 本发明的装置通过空间上的优化布局,使得搜索 和光电跟踪可以在同一平台上协同工作,搜索模 块与光电 探 测器视野互不遮 挡 ,结构更紧 凑 ,布 设所需的空间要求低。
9 .根据权利要求1至8中任一所述的一种搜索跟踪一体化装置,其特征在于,所述搜索 模块为光电搜索设备、机械扫描雷达或相控阵扫描雷达中的一种。
10 .如权利要求1至9中任一所述的一种搜索跟踪一体化装置的实现方法,其特征在于, 包含以下步骤:
A .搜索模块执行对动态目标的搜索扫描; B .搜索模块在发现目标时则将告警信息和目标位置发送给控制模块; C .控制模块将处理后的目标位置作为引导信息发送给二维伺服转台,二维伺服转台根 据引导信息驱动二维伺服转台方位轴和二维伺服转台俯仰轴旋转,带动成像探测模块指向
代理人 郭会
(51)Int .Cl . G01S 17/66(2006 .01) G01S 17/88(2006 .01) G01V 8/10(2006 .01)
(10)申请公布号 CN 109507687 A (43)申请公布日 2019.03.22
( 54 )发明 名称 一种搜索跟踪一体化装置及其实现方法
6 .根据权利要求4所述的一种搜索跟踪一体化装置,其特征在于,所述光学成像探测器 上还设有激光发射单元。
7 .根据权利要求4所述的一种搜索跟踪一体化装置,其特征在于,所述二维伺服转台上 设有光学传输通道,二维伺服转台的底部侧面留有作为激光进入通道的窗口。
8 .根据权利要求2所述的一种搜索跟踪一体化装置,其特征在于,所述搜索模块通过搜 索模块安装座固定在二维伺服转台的方位轴上,且搜索模块与成像探测模块安装时在高低 方向错开。
所述方位轴驱动电机安装在机架内部,用于带动成像探测模块和搜索模块执行绕二维 伺服转台方位 轴方向的 转动 ;俯仰轴驱 动电 机安装在机架内部 ,用于带 动成像探 测模块执 行绕二维伺服转台俯仰轴的转动。
3 .根据权利要求2所述的一种搜索跟踪一体化装置,其特征在于,所述二维伺服转台与 搜索模块具有独立的旋转轴,搜索模块通过搜索模块安装座安装在二维伺服转台方位轴 上 ,随 着二维 伺服转台一起沿二维 伺服转台方位 轴转动 ,同时独立地绕搜索模块方位 轴旋 转扫描,二维伺服转台驱动成像探测模块绕二维伺服转台方位轴和二维伺服转台俯仰轴旋 转,实现对目标的捕获与跟踪。
2 .根据权利要求1所述的一种搜索跟踪一体化装置,其特征在于,所述二维伺服转台包 括方位轴驱动电机、俯仰轴驱动电机和机架,所述机架用于提供各功能模块的安装支撑,在 机架的 俯仰轴上设有成像探 测模块安装座 ;在机架的 方位 轴上设有搜索模块安装座 ,在机 架内部设有方位轴驱动电机、俯仰轴驱动电机及控制模块的安装平台;
权利要求书2页 说明书5页 附图4页
CN 109507687 A
CN 109507687 A
权 利 要 求 书
1/2 页
1 .一种搜索跟踪一体化装置,其特征在于,包括二维伺服转台、成像探测模块、搜索模 块和控制模块;所述二维伺服转台用于带动搜索模块和成像探测模块执行沿二维伺服转台 方位轴和二维伺服转台俯仰轴的转动,实现对空中飞行目标进行指向和跟踪;成像探测模 块用于实现对空中飞行目标的实时成像探测并向控制模块发送图像数据;搜索模块用于执 行对动态飞行目标的搜索功能并将搜索到的目标数据信息传递给控制模块;控制模块用于 接收搜索模块发送的目标数据信息 ,并传递给二维伺服转台 ,控制二维伺服转台对飞行目 标进行追踪,以及接收并处理成像探测模块发送的图像数据,解算指向偏差并传递给二维 伺服转台。
4 .根据权利要求2所述的一种搜索跟踪一体化装置,其特征在于,所述成像探测模块安 装于成像探测模块安装座上,成像探测模块由一种或多种光学成像探测器构成。
5 .根据权利要求4所述的一种搜索跟踪一体化装置,其特征在于,所述光学成像探测器 为可见光成像探测器、微光成像探测器、红外成像探测器、望远镜或测距机。
2
CN 109507687 A
权 利 要 求 书
2/2 页
目标; D .成像探测模块对目标进行成像探测并将视频信息发送给控制模块; E .控制模块对视频信息进行处理,提取视频中的飞行目标,解算目标瞄准偏差,并根据
偏差量驱动二维伺服转台转动,实现对飞行目标的高精度跟踪。
3
CN 109507687 A
( 19 )中华人民 共和国国家(21)申请号 201910031900 .5
(22)申请日 2019 .01 .14
(71)申请人 中国久远高新技术装备公司 地址 100000 北京市海淀区丰豪东路1号
(72)发明人 杨锐 云宇 侯奕 杨波
(74)专利代理机构 四川省成都市天策商标专利 事务所 51213
说 明 书
1/5 页
一种搜索跟踪一体化装置及其实现方法
技术领域 [0001] 本发明涉及侦测与跟踪技术领域,特别涉及一种搜索跟踪一体化装置及其实现方 法。
背景技术 [0002] 现有的搜索和光电跟踪设备均为独立的系统: [0003] 1)搜索设备,主要分为光电搜索设备和搜索雷达两类。搜索雷达又可分为相控阵 搜索模块和机扫雷达两类。机扫雷达包括雷达天线和扫描转台 ,采 用机械旋转的方式进行 360°扫描;相控阵搜索模块采用相控阵使微波束旋转,来实现360 °扫描。 [0004] 2)光电跟踪设备,被广泛地用于对空中目标的跟踪。主要包括光电探测器及二维 伺服转台。二维 伺服转台包括T型结构与U型结构两种。光电 跟踪设备通过 增加光学传输通 道,还可以用于激光发射瞄准。 [0005] 在现有技术中,由于缺少一体化设计技术,搜索设备和光电跟踪设备未集成在一 起,会导致下述问题: [0006] 1)布设时,为了避免视野相互遮挡,搜索模块和光电跟踪设备必须安装在两个距 离较远的平台上,因此,要求的布设场地较大; [0007] 2)由于搜索模块和光电跟踪设备位于两个平台,两者的坐标体系不一致,每次布 设完毕后,必须对两套设备的坐标系进行标定,耗时耗力; [0008] 3)由于在系统的坐标获取和解析过程中均存在误差,搜索模块与光电跟踪设备之 间的目标位置数据存在误差,使得两者在联动工作时的目标引导任务成功率很低。