哈工大自动控制原理 大作业
哈工大自动控制原理大作业
Harbin Institute of Technology自动控制原理设计论文课程名称:自动控制原理设计题目:液压伺服系统校正院系:测控技术与仪器系班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学自动控制原理大作业一、 设计任务书考虑图中所示的系统。
要求设计一个校正装置,使得稳态速度误差常数为-14秒,相位裕度为,幅值裕度大于或等于8分贝。
利用MATLAB 画出已校正系统的单位阶跃响应和单位斜坡响应曲线。
二、 设计过程1、 人工设计1)、数据计算由图可知,校正前的开环传递函数为:0222s+0.10.025(20s 1)G =0.1(s 0.14)(1)44s s s s s +=++++ 其中按频率由小到大分别含有积分环节和放大环节,-20dB/dec ;一阶微分环节,10.05/w rad s =,0dB/dec;振荡环节,22/w rad s =,-40dB/dec;稳态速度误差:0202s+0.1e ()lim (s)lim 0.025(s 0.14)ss s s sG ss s →→∞===++。
显然,此时的相位裕度和稳态速度误差都不满足要求。
为满足题目要求,可以引入超前校正,提高系统的相位裕度和稳态速度误差。
2)、校正装置传递函数 (1)、稳态速度误差常数的确定为使稳态速度误差常数为-14秒,设加入的开环放大倍数为k,加入校正装置后的稳态速度误差满足: 11e ()4k 0.025kss v ∞=== 解得K=160;将K=160带入,对应的传递函数为:0222s+0.14(20s 1)G (s)=1600.1(s 0.14)(1)44s s s s s +=++++ 则校正前(加入k=160的放大倍数后)幅值穿越频率:018.00/c w rad s =,相位裕度:o 00.1631c r =; (2)、校正装置的确定这里采用超前补偿,由前面算得k=160,故设加入的校正装置传递函数为:111G (s)T 1c aT s s +=+ 设计后要求o =50γ,则o 0-=500.163149.8369o o γγ-=;a 满足:01sin 49.83691a a -=+ 解得:a =7.33,取a =8.取1010/18.00/c w rad s w rad s =<=作为第一个转折频率,取第二个转折频率为21*80/w a w rad s ==;在伯德图上过3rad/s 处做斜率为-20dB/dec 的线。
哈工大PLC大作业

哈⼯⼤PLC⼤作业《可编程控制器》课程设计院系:天平学院专业:机械制造及其⾃动化班级:0823姓名:俊学号:0730114326指导教师:郭丽华lihuaguo2008163.⽬录⽬录………………………………………………………………第⼀章交通信号控制系统实况.................................1.1⼗字路⼝交通灯控制实际情况描述.............................1.2 结合⼗字路⼝交通灯的路况画出模拟图.........................第⼆章可编程控制器程序设计.................................2.1 ⼗字路⼝交通灯模拟控制时序图.............................2.2可编程控制器I/O端⼝分配...................................2.3程序梯形图及语句表.......................................第三章总结.................................................3.1程序调试...............................................3.2 难点分析...............................................3.3 PLC智能化控制交通灯的⽅法................................3.4 收获与体会.............................................. 参考⽂献....................................................第⼀章交通信号控制系统分析1.1⼗字路⼝交通灯控制实际情况描述(1)南北⽅向绿灯和东西⽅向的绿灯不能同时亮;如果同时亮,则应⾃动⽴即关闭信号灯系统,并⽴即发出报警信号。
哈尔滨工业大学自控原理习题答案(第三章)

则根据系统框图可得
代入 ,得
另 ,得到系统的干扰输出
则误差表达式为
若积分环节加在扰动点之前则
, ,
可求得 。
若积分环节加在扰动点之后,则
, ,
可求得
由此可见在扰动点之前的前向通道加入积分环节,才能消除阶跃扰动产生的稳态误差。
3.23
设
则系统的闭环传递函数为:
误差为
将 及 得
闭环特征方程为
又因为 故系统稳定,与参数a,b无关。
若
则有系统的稳态误差
则求出待定系数为
3.29
当a=0时系统的闭环传递函数为:
则根据
得 。
当 ,根据系统的闭环传递函数为
则根据
得a=0.25
3.30
由图3.30所示的单位阶跃响应 ,可得系统的超调量和峰值时间为
又有参数间的关系:
因为系统的开环传递函数为 ,则系统的闭环传递函数为
则
得到参数为
3.34
列Routh表可得
3.12
由系统框图可知系统的开环传递函数为
因为是单位反馈,可得系统的特征方程为
如果要求闭环传递函数的特征根全部位于s=-1垂线之左,可令s=z-1,并代入特征方程,得
建立Routh表
Z3115
z21140K-27
z1 0
z040K-27
令第一列的元素全部为正,可得不等式组
解得K的取值范围为
3.14
由系统框图可以求得系统的开环传递函数为
3.1
图3.1(b)所示的单位阶跃响应具有等幅振荡特性,说明系统的阻尼比 。这与系统主反馈取“-”及内反馈取“0”相对应,因为在这种情况下该二阶系统的传递函数为
图3.1(c)所示单位阶跃响应具有发散特性,说明系统不稳定。这与系统的主反馈取“-”及内反馈取“+”相对应,因为在这种情况下,该二阶系统的传递函数为:
哈工大-自动控制原理八套习题集

A.
2
3s 2 6s 2
C.
2
2s2 6s 3
B.
1
3s 2 6s 2
D.
1
2s2 6s 3
7. 引出点前移越过一个方块图单元时,应在引出线支路上( )
A.并联越过的方块图单元
B.并联越过的方块图单元的倒数
C.串联越过的方块图单元
D.串联越过的方块图单元的倒数
8.
设一阶系统的传递 G (s)
6. 梅逊公式主要用来( )
A.判断稳定性
B.计算输入误差
C.求系统的传递函数
D.求系统的根轨迹
7. 已知二阶系统单位阶跃响应曲线呈现出等幅振荡,则其阻尼比可能为( )
A.0.6
B.0.707
C.0
D.1
8. 在系统对输入信号的时域响应中,其调整时间的长短是与( )指标密切相关。
A.允许的稳态误差
B.允许的超调量
41.求图示方块图的传递函数,以 Xi (s)为输入,X0 (s)为输出。
Xi(s) + - + -
+
G1 H2
-
G2
G4
G3 H3
+ + X0(s)
42.建立图示系统的数学模型,并以传递函H数1 形式表示。
x0
k1
k2
fi
M
D
43.欲使图所示系统的单位阶跃响应的最大超调量为 20%,峰值时间为 2 秒,试确定 K 和 K1 值。
37.一阶惯性系统当输入为单位阶跃函数时,如何用实验方法确定时间常数 T ?其调整时间
ts 和时间常数 T 有何关系,为什么? 38.什么是主导极点?主导极点起什么作用,请举例说明。
自动控制原理课件及习题

试题:自动控制原理班号:姓名:
六、(10分)以上Bode图中A、B、C分别是三个最小相位系统的对数幅频特性,比较
A、B、C三个控制系统的性能。
1)当输入信号 时,三个系统的稳态误差:
2)当输入信号 时,三个系统的稳态误差:
3)当输入信号 时,三个系统的超调量:
4)当输入信号 时,三个系统的调整时间:
2)当闭环极点在阴影线范围内时,求参数 和 应满足的条件。
第4页(共10页)
试题:自动控制原理班号:姓名:
四、(15分)绘制下图所示系统的根轨迹图。
第5页(共10页)
试题:自动控制原理班号:姓名:
五、(15分)已知系统的方框图如下图所示:
1)绘出根轨迹的大致图形;
2)为使根轨迹通过 点,拟加入串联校正装置 ,求τ的数值。
闭环极点
阶跃响应
闭环极点
阶跃响应
A
F
B
G
C
H
D
I
E
J
第2页(共10页)
试题:自动控制原理班号:姓名:
第3页(共10页)
试题:自动控制原理班号:姓名:
三、(10分)控制系统的方框图如下图所示:
1)希望闭环系统的极点位于s平面上 直线的左侧,并且阻尼比 。试在s平面
上画出闭环系统极点的分布范围(用阴影线表示);
5)三个系统的相角裕度:
(请用<、=、>表示)
第7页(共10页)
试题:自动控制原理班号:姓名:
七、(15分)控制系统的方框图如下图所示:
要求采用串联校正后系统的开环对数幅频特性如下图所示:
1)求校正环节的传递函数;
2)求校正后的相角裕度。(可以利用Bode图中折线求取必要数据)
三轴转台内环控制系统【哈工大自动控制原理 大作业】【范本模板】
Harbin Institute of Technology三轴转台内环控制系统课程名称:自动控制原理院系:班级:设计者:学号:设计时间:2016。
1。
1哈尔滨工业大学哈尔滨工业大学一、背景描述三轴转台是应用在半实物仿真系统中,模拟被测物体姿态变化的装置.本文研究的主要内容是三轴转台的内环控制系统。
二、问题描述技术要求:最大角速度400/o s ,最大动态踪误差0.02o ss e ≤;频带宽度148c s ω-≥,相位裕度45oγ=。
固有系统传递函数: 原题如下:修改后如下:三、求解过程设,为待定的补偿装置传递函数,。
设计要求为0.02oss e ≤令0。
02=,则K=2系统开环传递函数如下:E s θ sU s + —G C s G 0 s对数幅频特性方程如下:令,得剪切频率。
相位裕度:由bode图中校正前的图像可知需采用超前补偿的方法,加入校正装置如下:可求得:,得哈尔滨工业大学所以校正后的传递函数:校正后的相位裕度:性能要求系统相位裕度为,而校正后的系统相位裕度为,符合要求. 令,得校正后的剪切频率::校正前与校正后的系统bode图如下哈尔滨工业大学四、计算机辅助设计观察系统的单位阶跃相应曲线:哈尔滨工业大学五、校正装置电路图电路元件参数为:R2=1.3kΩ R3=6.0kΩ C1=28.1μF C2=12.8μF六、结论校正后的传递函数:哈尔滨工业大学校正后的相位裕度::校正后的剪切频率七、设计后的心得体会经过本次大作业的设计,我深刻体会到了基础知识的重要性:熟练掌握相关基础知识有利于理解文献和软件的高级操作.哈尔滨工业大学。
哈工大PLC大作业教程文件

哈工大P L C大作业《可编程控制器》课程设计院系:天平学院专业:机械制造及其自动化班级: 0823姓名:李俊学号: 0730114326指导教师:郭丽华lihuaguo2008@目录目录………………………………………………………………第一章交通信号控制系统实况.................................1.1十字路口交通灯控制实际情况描述.............................1.2 结合十字路口交通灯的路况画出模拟图.........................第二章可编程控制器程序设计.................................2.1 十字路口交通灯模拟控制时序图.............................2.2可编程控制器I/O端口分配...................................2.3程序梯形图及语句表.......................................第三章总结.................................................3.1程序调试...............................................3.2 难点分析...............................................3.3 PLC智能化控制交通灯的方法................................3.4 收获与体会.............................................. 参考文献....................................................第一章 交通信号控制系统分析1.1十字路口交通灯控制实际情况描述(1)南北方向绿灯和东西方向的绿灯不能同时亮;如果同时亮,则应自动立即关闭信号灯系统,并立即发出报警信号。
哈工大1系自动控制原理大作业
哈工大自动控制原理大作业一、设计任务:在新材料的分析测试工作中,需要在较宽的参数范围内真实再现材料的实际 工作环境。
从控制系统的角度出发,可以认为,材料分析设备是一个能准确 跟踪参考输入的伺服系统。
该系统的框图如图所示。
7. 继续参考题6给出的系统,试设计一个合适的超前校正网络,使系统的相角裕度为50,调节时间小于4秒(按2%准则),稳态速度误差常数为2秒-1。
二、设计过程: 原传递函数 ()042(1)(2)(1)(1)2G s s s s s s s ==++++ 转折频率为11ω=和22ω=,剪切频率122c ωωω==Bode 图如下:系统的相位裕度218090arctan 2arctan02γ=---= 为了满足相位裕度50γ≥的条件,需要对系统进行超前补偿。
由于要求稳态速度误差常数为2秒-1,所以放大系数K=2,即K 保持不变。
取50γ=,11 1.3sin sin 50r M γ=== 22 1.5(1) 2.5(1)s r r c t M M πω⎡⎤=+-+-⎣⎦且要求s t 小于四秒。
求得 2.1c ω≥,Mr Mr c 12-≤ωω知50.02≤ω。
所以根据设计要求50.02≤ω在Bode 图上进行设计,取2.02=ω(为了计算方便)求得串联超前校正环节传递函数11012.0)(++=s ss Gc 并且作图如下:补偿之后的系统传递函数为)110)(12)(1()12.0(2)()()(++++==ss s s ss Go s Gc s G 相位裕度18090arctan 22.5arctan 4.5arctan 2.25arctan 0.4150.21γ=-+---=1 1.3sin 50.21r M ==,22 1.5(1) 2.5(1) 3.82s r r c t M M s πω⎡⎤=+-+-=⎣⎦ 均满足设计条件。
2、计算机辅助设计: (1)校正前伯德图M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 3.52 dB (at 1.41 rad/sec) , P m = 11.4 deg (at 1.14 rad/sec)Frequency (rad/sec)(2)校正后伯德图-200-150-100-50050M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 34.2 dB (at 14.1 rad/sec) , P m = 50.9 deg (at 1.57 rad/sec)Frequency (rad/sec)(3)三个伯德图Bode DiagramFrequency (rad/sec)10101010101010P h a s e (d e g )M a g n i t u d e (d B )3、单位阶跃响应曲线以及单位速度响应曲线01234567891012345678910Linear Simulation ResultsTime (sec)A m p l i t u d eStep ResponseTime (sec)A m p l i t u d e0123456789100.20.40.60.811.21.44、校正后阶跃响应图三、校正装置电路图C1 1uFC210pF+-OU TR1 1M R2 1MR0100k三、设计结论:校正后的系统相位裕度为50.9,调节时间为3秒,稳态速度误差常数为2,符合要求。
哈工大自动控制原理大作业
自动控制原理大作业(设计任务书):院系:班级:学号:5. 参考图 5 所示的系统。
试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60度,幅值裕度不小于8 分贝。
利用MATLAB 画出 已校正系统的单位阶跃和单位斜坡响应曲线。
+一.人工设计过程1.计算数据确定校正装置传递函数为满足设计要求,这里将超前滞后装置的形式选为)1)(()1)(1()(2121T s T s T s T s K s G cc ββ++++= 于是,校正后系统的开环传递函数为)()(s G s G c 。
这样就有)5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205==cK所以100=c K这里我们令100=K ,1=c K ,则为校正系统开环传函)5)(1(100)(++=s s s s G首先绘制未校正系统的Bode 图由图1可知,增益已调整但尚校正的系统的相角裕度为︒23.6504-,这表明系统是不稳定的。
超前滞后校正装置设计的下一步是选择一个新的增益穿越频率。
由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s ,将新的增益穿越频率仍选为2rad/s ,但要求2=ωrad/s 处的超前相角为︒60。
单个超前滞后装置能够轻易提供这一超前角。
一旦选定增益频率为2rad/s ,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。
将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。
要获得另一个转角频率)/(12T βω=,需要知道β的数值, 对于超前校正,最大的超前相角m φ由下式确定11sin +-=ββφm 因此选)79.64(20==m φβ,那么,对应校正装置相角滞后部分的极点的转角频率为)/(12T βω=就是01.0=ω,于是,超前滞后校正装置的相角滞后部分的传函为1100152001.02.0++=++s s s s 相角超前部分:由图1知dB j G 10|)4.2(|=。
哈工大机械系统自动控制大作业-伺服控制系统的控制特性研究

Harbin Institute of Technology机械系统自动控制技术大作业报告题目:伺服控制系统的控制特性研究班级:作者:学号:指导教师:郝明晖郝双晖时间:2015.5.6哈尔滨工业大学摘要交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。
本文主要以交流伺服系统为例进行伺服控制系统的控制特性分析。
一、引言“伺服系统”是指执行机构按照控制信号的要求而动作,即控制信号到来之前,被控对象时静止不动的;接收到控制信号后,被控对象则按要求动作;控制信号消失之后,被控对象应自行停止。
伺服系统的主要任务是按照控制命令要求,对信号进行变换、调控和功率放大等处理,使驱动装置输出的转矩、速度及位置都能灵活方便的控制。
图1 伺服系统构成二、伺服系统分类伺服系统的分类方法很多,常见的分类方法有以下三种.(1)按被控量参数特性分类;(2)按驱动元件的类型分类:伺服控制系统按所用控制元件的类型可分为机电伺服系统、液压伺服系统(液压控制系统)和气动伺服系统;(3)按控制原理分类.伺服系统可分为开环控制伺服系统、闭环控制伺服系统和半闭环控制伺服系统。
常见的四种伺服控制系统有液压伺服控制系统、交流伺服控制系统、直流伺服控制系统、电液伺服控制系统,下面以交流伺服系统为例进行其控制特性分析。
图2 交流控制原理三、性能分析交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。
低档的伺服系统调速范围在1:1000以上,一般的在1:5000—1:10000,高性能的可以达到1:100000以上;定位精度一般都要达到±1个脉冲,稳速精度,尤其是低速下的稳速精度比如给定1rpm时,一般的在0. 1 rpm以内,高性能的可以达到±0.01 rpm 以内;动态响应方面,通常衡量的指标是系统最高响应频率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90或者幅值不小于50%。
哈工大自控实验报告

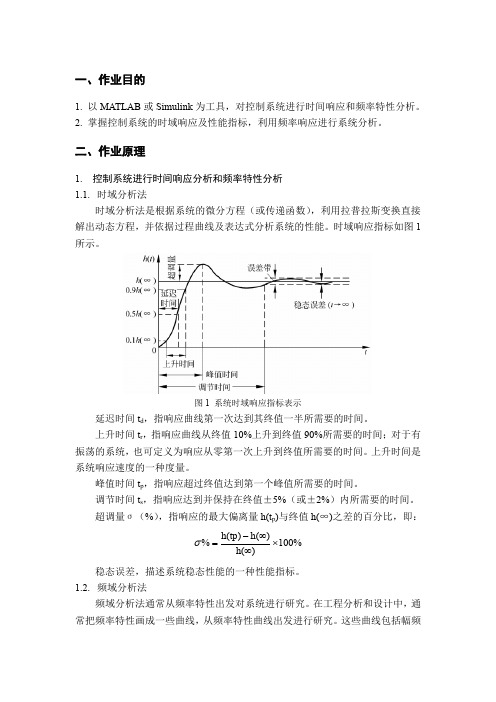
自动控制理论实验报告班号:1206161学号:1120610827姓名:郎秋生实验三 采用PI 的串联校正一、实验原理、内容及步骤1、原系统的原理方块图未校正系统的方块图如下所示:50(0.061)S S +()C S ()R S ×+-要求设计PI 串联校正装置,校正时使用期望特性开环传递函数为典型II 型并使系统满足下列指标:%25≤p σs t s 84.0≤校正网络的传递函数为:()101c R CS G s R CS+=校正后的方块图为:101R CS R CS+K50(0.061)S S +()C S ()R S ×+-2、系统校正前后的模拟电路图+-+-+-20K20K20K20K10K10K1u3u ()R t ()C t图1 校正前系统模拟电路图+-+-+-20K20K20K10K10K1u3u()C t +-+-3R 2R 6.47u1R 100K100K()R t图2 系统校正后的模拟电路图二、实验结果1、未校正系统的性能指标 理论分析:系统固有部分的分析: 原系统的开环传函:()()()502500/30.06150/3G s s s s s ==++对于二阶系统:()2=2nn G s s s ωζω+() 可得:12500328.87n s ω-==,50/30.292nζω==固有系统单位阶跃响应的超调量为:2exp()100%38.6%1p M ζπζ=-⨯=-调整时间:40.48s nt s ζω==实验中测得的未校正系统的阶跃响应曲线如下所示:由响应曲线可知:实测的系统的超调量为33.3% 调整时间为0.419s 。
实测值 理论值 超调量 33.3% 38.6% 调整时间 0.425s 0.48s由上表可知,对比理论值与实际值,相差不大,在误差允许的范围内,测量结果正确。
2、校正系统的性能指标 理论分析:校正参数设计如下:(1)对于具有中频宽系统,时域响应与频域响应的指标间的经验公式如下:()1s cK t πω=()0.160.41p r M σ=+-()()22 1.51 2.51r r K M M =+-+-(2)典型Ⅱ型系统的bode 图分析:aK cω1ω2ωh12h +开环传函:()1221111a K s G s s s ωω⎛⎫+ ⎪⎝⎭=⎛⎫+ ⎪⎝⎭,中频宽2111r r M h M ωω+==-,振荡度11rh M h +=- (3)系统要求的指标要求:25%p M ≤,0.84St s ≤。
哈工大自动控制原理大作业

哈工大自动控制原理大作业Harbin Institute of Technology课程设计说明书(论文)课程名称:自控控制原理大作业设计题目:控制系统的矫正院系:自动化测试与控制系班级:设计者:学号:指导教师:强盛设计时间: 2016.12.21哈尔滨工业大学题目88. 在德国柏林,磁悬浮列车已经开始试验运行,长度为 1600m的M-Bahn号实验线路系统代表了目前磁悬浮列车的发展水平。
自动化的磁悬浮列车可以在较短的时间内正常运行,而且具有较高的能量利用率。
车体悬浮控制系统的框图模型如图 8 所示,试设计一个合适的校正网络,使系统的相位裕度满足45°≤γ≤55°,并估算校正后系统的阶跃响应。
图 8 题 8 中磁悬浮列车悬浮控制系统一、人工设计利用半对数坐标纸手工绘制系统校正前后及校正装置的Bode图,并确定出校正装置的传递函数。
验算校正后系统是否满足性能指标要求。
1)未校正系统的开环频率特性函数应为:G0(jω)=1s2(s+10)1s2 (s 10)2)未校正系统的幅频特性曲线图如下:由图中可以得出:ωc=√K=0.316 rad/s 对应的相位裕度为:γ(ωc)=180°−180°−arctan(ωc10)=−1.81°3)超前校正提供∅(m)=50°4)a−1a+1=sin50°解得 a=7.55)−10lga=−8.75dB,得到ωm=0.523 rad/s6)1T =√aωm=1.43 rad/s 1aT=0.19 rad/s7)G C(s)=1+5.3s1+0.7s10-210-1100101102二、计算机辅助设计利用MATLAB语言对系统进行辅助设计、仿真和调试g = tf(1,[1 10 0 0]);gc = tf([5.3 1],[0.7 1]);ge = tf([5.3 1],conv([0.7 1],[1 10 0 0]));bode(g,gc,ge);gridlegend('uncompensated','compensator','compensated')[kg,r,wg,wc]=margin(ge)系统校正前后及校正装置的Bode图:性能指标:kg =18.3027 r =47.0334 wg =3.4822 wc =0.5273 满足题目要求。
自动控制原理E卷

考试科目:
题号 分数 评卷人 一
哈尔滨工程大学试卷
共 2 页;第 1 页
E卷
2. 控制系统结构图如下: 已知 G 1 ( s ) a s 2 b s c
G (s) 10 s ( 0 . 2 s 1)( 0 . 3 s 1)
第 2 页
自动控制原理
二 三 四 五 六 总分
试选择参数 a、b、c 的值,使系统响应速度信号时无稳态误差。(15 分)
G3(s) G1(s) H(s) G2(s) -
1. 绘制该系统的根轨迹。(8 分) 2. 绘制 K=50 时的开环频率特性(Nyquist 曲线草图),并应用 Nyquist 稳 定判据说明 K=50 时闭环系统的稳定性。(7 分) 五、(15 分)设单位负反馈系统的开环传递函数为: G ( s )
R(s) G1(s) + G2(s) C(s)
四、(共 15 分)已知负反馈控制系统开环传递函数为: G ( s )
K s ( s 2 )( s 3 )
姓名:
一、控制系统数学模型(共 20 分) 1. RLC 无源网络如图所示。试列写以 ui(t)为输入量, uo(t)为输出的 微分方程。并求网络的传递函数。(10 分) R1 ui(t) C R2 2. 控制系统结构图如下所示。 画出对应的信号流图, 并用梅森公式求 传递函数 C(s)/R(s)。(10 分)
订
学号:
线
R(s)
C(s)
二、(15 分)已知控制系统的结构图如下所示: 1. 当主反馈开路时,系统的单位阶跃响应为: 0 . 5 e t. 当 G ( s )
1 s3
,且 r ( t ) 10 1( t ) 时,求 t p 、 p 、 e ss 。
哈工大电工学大作业
电工大作业——运料小车的电气控制 作者:*** 班号:**** 学号:*****设计课题:运料小车的电气化控制设计背景:1.有一运料小车如右图示,动作过程要求如下:小车可在A 、B 两地分别启动。
A 地启动后,小车先返回限位开关ST1处,停车30s 装料;然后自动驶向B 地,到达限位开关ST2处停车,底门电磁铁动作,卸料30s ;然后返回A 地,停车30s 装料,如此往复。
控制要求:(1)手动操作:能手动控制小车向前运行,向后运行,并能打开小车底门。
(2)连续往返自动控制:当小车启动后,能够自动往返运行。
(3)停车控制:小车在自动往返运行过程中,均可用手动开关令其停车。
再次启动后,小车重复(2)中内容。
设计要求:1.设计该机床的电气控制主电路;2.设计该机床的控制电路;控制电路采用继电接触器控制或可编程控制器实现均可。
3.查阅相关资料,编写详细的电气系统设计说明书,注意规范。
实验器材:熔断器:FU按钮:SB0,SB1,SB2,SB3,SB4,SB5时间继电器:KT1,KT2接触器:KM1,KM2,KM3,KM4行程开关:ST1,ST2电磁铁:KM5说明书:自动操作:按下按钮SB1,KM2通电,并形成自锁。
小车返回行程开关ST1处,此时ST1的常开触点闭合,时间继电器KT2通电,30s 后KT2的延时闭合触点闭合(小车在这时间内装料),KM1通电,小车向ST2处运动。
当运动到ST2后,ST2的常开触点被压合,时间继电器KT1通电,此时,电磁铁KM5通电,底门打开,开始卸料,30s 后KT1的延时闭合触点闭合,小车向ST1运动,如此往复。
按下按钮SB0,机器停止。
手动操作:按下按钮SB2,小车返回ST1处。
按下按钮SB4,小车向ST2运动。
按下按钮SB5,底门打开,开始卸料。
按下按钮SB0,机器停止。
附加:KM1与KM3,KM2与KM4的功能是一样的。
只是一个是自动控制,一个是手动控制。
限位开关 限位开关控制电路:控制电路:请老师点评!如果您认为不可行,请指点一下。
哈工大机电系统控制基础大作业一指导书
函数实现,如图 3(b)所示。
R(S)
系统1 G1(s)
+
+
系统2 G2(s)
Y(S)
T (s) Y (s) num R(s) den
(a) num1
G1(s) den1
G2 (s)
num 2 den 2
仿真时间区段 三种τ值下的
系统模型 系统响应
生成图形
图 11 MATLAB 文本
对于任意输入,例如正弦输入,应用lsim函数可以求得 =0.025时系统的时 间响应及误差曲线,如图12所示。所用MATLAB文本如图13所示。
x(t)
1 0.8 0.6 0.4 0.2
0 -0.2 -0.4 -0.6 -0.8
t=[0:0.01:0.8];
nG=[50]; tao=0;dG=[0.05 1+50*tao 50];G1=tf(nG,dG); tao=0.0125;dG=[0.05 1+50*tao 50];G2=tf(nG,dG); tao=0.025;dG=[0.05 1+50*tao 50];G3=tf(nG,dG);
y:输出响应
sys:由tf,zpk
x:状态响应
或ss建立的
(仅用于状态空间模型) 模型
u : 输入
t : 仿真时间 区段(可选)
[y, x] lsim[sys, u, t]
图 8 lsim 函数
2.4. 利用 MATLAB 绘制 Bode 图 在MATLAB中,可以用不带输出参数bode函数自动生成Bode图。而用带输
自动控制原理大作业报告

背景:卫星通讯具有通讯距离远、覆盖范围大、通讯方式灵活、质量高、容量大、组网迅速基本不受地理和自然环境限制等一系列优点。
近来,采用小口径天线的车载卫星天线得到越来越广泛的应用。
系统采用8052单片机,对步进电动机运转和锁定进行有效控制。
在我做的大作业中选取了其中自动控制的部分进行分析和校正。
系统的提出:天线方位角位置随动系统建摸系统的原理图如图所示。
系统的任务是使输出的天线方位角θ0(t)跟踪输入方位角θi(t)的变化,试建立该系统的数学模型。
系统的参数值如下:电源电压V=10v;功率放大器的增益和时间常数K1=1,T1=0.01s;伺服电动机的电枢回路电阻Rd =8Ω,转动惯量Ja=0.02Kg m2,粘性摩擦系数f a=0.01N m s/rad,反电势系数C e=0.5V s/rad,转矩系数C m=0.5N m/A;减速器各齿轮的齿数为Z1=25,Z2= Z3=250;负载端的转动惯量JL=1 Kg m2粘性摩擦系数fL=1N m s/rad。
预定目标:阶跃响应的稳态误差为0,斜坡响应的稳态误差小于5%,阶跃响应的超调量小于25%,调节时间小于0.5s解:采用组合系统建摸法,根据原理图可以将系统划分为六个环节:输入电位器,差分放大器,功率放大器,电动机,减速器和输出电位器。
首先建立各个环节的数学模型,然后将它们组合起来则可得系统的数学摸型。
1环节的数学模型(1) 输入电位器与输出电位器由于输入电位器与输出电位器的线路和电位器的结构均相同,故这两个环节的传递函数是一样的。
对电位器环节的输出电压与输入角位移的特性进行线性化处理则可视其为一比例环节。
由图可知;当动触头位于电位器中心时其输出电压为零;朝前或朝后转动5圈其输出电压变化均为10V。
于是可得它们的传递函数为(2) 差分放大器与功率放大器放大器通常工作在放大状态,可不考虑饱和的影响。
差分放大器的时间常数比起功率放大器以及系统的其他环节的时间常数要小得多,可以忽视不计。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理大作业(设计任务书)姓名:院系:班级:学号:5、 参考图 5 所示的系统。
试设计一个滞后-超前校正装置,使得稳态速度误差常数为20 秒-1,相位裕度为60度,幅值裕度不小于8 分贝。
利用MATLAB 画出 已校正系统的单位阶跃与单位斜坡响应曲线。
+一.人工设计过程1、计算数据确定校正装置传递函数为满足设计要求,这里将超前滞后装置的形式选为)1)(()1)(1()(2121T s T s T s T s K s G cc ββ++++= 于就是,校正后系统的开环传递函数为)()(s G s G c 。
这样就有)5)(1()(lim )()(lim 00++==→→s s s K s sG s G s sG K c c s c s v 205==cK所以100=c K这里我们令100=K ,1=c K ,则为校正系统开环传函)5)(1(100)(++=s s s s G首先绘制未校正系统的Bode 图由图1可知,增益已调整但尚校正的系统的相角裕度为︒23.6504-,这表明系统就是不稳定的。
超前滞后校正装置设计的下一步就是选择一个新的增益穿越频率。
由)(ωj G 的相角曲线可知,相角穿越频率为2rad/s,将新的增益穿越频率仍选为2rad/s,但要求2=ωrad/s 处的超前相角为︒60。
单个超前滞后装置能够轻易提供这一超前角。
一旦选定增益频率为2rad/s,就可以确定超前滞后校正装置中的相角滞后部分的转角频率。
将转角频率2/1T =ω选得低于新的增益穿越频率1个十倍频程,即选择2.0=ωrad/s 。
要获得另一个转角频率)/(12T βω=,需要知道β的数值,对于超前校正,最大的超前相角m φ由下式确定11sin +-=ββφm 因此选)79.64(20ο==m φβ,那么,对应校正装置相角滞后部分的极点的转角频率为)/(12T βω=就就是01.0=ω,于就是,超前滞后校正装置的相角滞后部分的传函为1100152001.02.0++=++s s s s 相角超前部分:由图1知dB j G 10|)4.2(|=。
因此,如果超前滞后校正装置在2=ωrad/s 处提供-10dB 的增益,新的增益穿越频率就就是所期望的增益穿越频率。
从这一要求出发,可以画一条斜率为-20dB 且穿过(2rad/s,-10dB)的直线。
这条直线与0dB 与-26dB 线的交点就确定了转角频率。
因此,超前部分的转角频率被确定为s rad s rad /10/5.021==ωω和。
因此,超前校正装置的超前部分传函为)11.012(201105.0++=++s s s s综合校正装置的超前与之后部分的传函,可以得到校正装置的传递函数)(S G c 。
即)1100)(11.0()15)(12(01.02.0105.0)(++++=++++=s s s s s s s s s G c校正后系统的开环传递函数为)5)(1(100)01.0()2.0()7()23.0()()(++++++=s s s s s s s s G s G css s s s s s 35.047.3513.4701.136.44310023452++++++=)12.0)(1()1100)(11.0()15)(12(20++++++=s s s s s s s)2100(tan )21.0(tan 90)22(tan )25(tan 1801111⨯-⨯--⨯+⨯+=----οογο99.63)22.0(tan )21(tan 11=⨯-⨯---满足条件。
二.计算机辅助设计过程MA TLAB 程序1 : >> num=[100];>> den=[1 6 5 0];>> w=logspace(-1,1,100); >> bode(num,den,w) >> grid>> title('Bode Diagram of G1(s)=100/[s(s+1)(s+5)]') >> [Gm,Pm,wcp,wcg]=margin(num,den);Warning: The closed-loop system is unstable 、 >> GmdB=20*log10(Gm); >> [GmdB,Pm,wcp,wcg] ans =-10、4576 -23、6504 2、2361 3、907 >> gtext('Phase margin= -23、6504 degrees') >> gtext('Gain margin=-10、4576 dB'-40-20204060M a g n i t u d e (d B )101010-270-225-180-135-90P h a s e (d e g )Bode Diagram of G(s)=100/[s(s+1)(s+5)]Frequency (rad/s)图1 G(S)的Bode 图MA TLAB 程序2>> numc=[1 0、7 0、1] >> denc=[1 10、01 0、1]>> grid>> title('Bode Diagram of Lag-Lead Compensator')-25-20-15-10-50M a g n i t u d e (d B)1010101010101010-90-454590P h a s e (d e g )Bode Diagram of Lag-Lead Compensator1110100115Frequency (rad/s)图2 所设计的超前滞后校正装置的Bode 图>> a=[1 7、01 0、07]; >> b=[1 6 5 0]; >> conv(a,b) ans =1、0000 13、0100 47、1300 35、4700 0、3500 0 校正后系统的开环传递函数为)5)(1(100)01.0()2.0()7()23.0()()(++++++=s s s s s s s s G s G css s s s s s 35.047.3513.4701.136.44310023452++++++=)12.0)(1()1100)(11.0()15)(12(20++++++=s s s s s s sMATLAB 程序3>> num1=[100 70 10];>> den1=[1 16、01 65、16 50、65 0、5 0];Grid>> title('Bode Diagram of Gc(s)G(s)') [Gm,Pm,wcp,wcg]=margin(num1,den1); GmdB=20*log10(Gm); [GmdB,Pm,wcp,wcg] ans =18、3255 69、4880 7、3877 1、6881 >> gtext('Phase margin=60、5377 degrees') >> gtext('Gain margin=14、1518 dB')M a g n i t u d e (d B )1010101010101010P h a s e (d e g )Bode Diagram of Gc(s)G(s)1110100115Frequency (rad/s)图3 校正后系统的开环传递函数)()(s G s G c 的Bode 图校正后系统的相角裕度69、488°,增益裕度为18、33dB,静态速度误差系数为201s ,所以要求均已满足。
单位阶跃响应:13Step ResponseTime (seconds)A m p l i t u d e图4 调整增益,但未加校正前单位阶跃响应曲线校正后因为)5)(1()01.0)(10()2.0)(5.0(100)()(++++++=s s s s s s s s G s G c 所以有)()(1)()()()(s G s G s G s G s R s C c c +==)2.0)(5.0(100)5)(1()01.0)(10()2.0)(5.0(100+++++++++s s s s s s s s s 1.001.10)01.0)(10()(2++=++=s s s s s a s s s s s s s b 56)5)(1()(23++=++=1070100)2.0)(5.0(100)(2++=++=s s s s s c于就是有a=[1 10、01 0、1] b=[1 6 5 0] c=[100 70 10 ]>> a=[1 10、01 0、1]; >> b=[1 6 5 0]; >> c=[100 70 10 ]; >> p=[conv(a,b)]+[0 0 0 c] p =1、0000 16、0100 65、1600 150、6500 70、5000 10、0000MATLAB 程序4>> num=[100 70 10];>> den=[ 1 16、01 65、16 150、65 70、5 10]; >>t=0:0、2:50;>> step(num,den,t) >> grid>> title('Unit-Step Response of Compensated Systerm')051015202530354045500.20.40.60.811.21.4Unit-Step Response of Compensated SystermTime (seconds)A m p l i t u d e图5 校正后系统的单位阶跃响应曲线单位斜坡响应:4图6 调整增益,但未加校正前单位斜坡响应曲线MA TLAB程序5>> num=[100 70 10];>> den=[ 1 16、01 65、16 150、65 70、5 10 0]>>t=0:0、05:20;>>c=step(num,den,t);>> plot(t,c,'-',t,t,'、')>> grid>> title('Unit-Ramp Response of Compensated Systerm')>> xlabel('Time(sec)')>> ylabel('Unit-Ramp Input and Output c(t)' )2468101214161820Unit-Ramp Response of Compensated SystermTime(sec)U n i t -R a m p I n p u t a n d O u t p u t c (t )图7 校正后系统的单位斜坡响应曲线Simulink 仿真框图0123456789101110100115wangsiyut/s y图(1)单位阶跃响应仿真图像01020304050600123456789101110100115wangsiyu图(2)单位斜坡响应图像三.校正装置电路图sr U sc U)1100)(11.0()15)(12(1])1([)1)(1()()(221122121++++=++++++=s s s s s T R R T s T T s T s T s U s U sr sc 5111==C R T 2222==C R T四.设计结论 设计的滞后超前校正装置为)1100)(11.0()15)(12()(++++=s s s s s G c ,经计算与仿真,校正后系统的相角裕度69、488°,增益裕度为18、33dB,静态速度误差系数为201-s ,所以要求均已满足。