基于PLC的直流电机测速系统
基于PLC的直流电机控制系统设计

基于PLC的直流电机控制系统设计摘要:本文提出了一种利用可编程逻辑控制器件(plc)对他励直流电机进行速度控制的方法。
该方法使plc工作在dc/dc斩波模式,通过将固定直流电压转变为可变直流电压提供给电机电枢。
pang-pang控制是依据参考速度来导通或关断直流电机的电源。
这种方法简单、迅速而且有效,能够在0至100%范围内调整电机转速。
该系统能够广泛应用于不同的工业应用场合。
关键词:直流电机可编程逻辑器件速度控制中图分类号:tm921.5 文献标识码:a 文章编号:1007-9416(2013)01-0010-021 引言直流电机的速度控制相对于交流电机来说更加的简单,成本也更低。
但是由于有换向器的存在,直流电机不太适用于转速要求较高的场合,而且也有维修成本。
固定交流电压通过可控整流器得到可变直流电压输出,而固定直流电压可以通过斩波器得到可变直流电压输出[1]。
由于以上两者能提供连续可变的直流电压,使得其在工业控制中的到广泛应用。
可编程逻辑器件(plc)是一种工业计算控制单元,它能够在各种处理过程和工况环境下执行离散或连续的控制[2]。
工业过程控制时plc应用最为广泛的场合。
本文利用plc工作在dc/dc斩波器模式下,提出一种基于plc的直流电机速度控制系统。
该系统避免了功率管的时间导数dv/dt或者di/dt。
该系统能广泛应用于各种环境下。
2 直流电机的经典斩波控制方法直流斩波器是用来改变电枢电压的一种器件,它连接在固定直流电压源与直流电机之间。
斩波器能提供电机的制动反馈能量,并能把能量反馈到电源[3,4]。
他励直流电机的斩波控制电路如图1所示。
电机电流是否连续取决于占空比和电枢电感。
图2所示为电机电流连续和不连续时的波形。
其中有三种可能的工作模式,下面将逐一介绍。
模式一:功率管t导通,在0<t<t1时电源给电机供电,ia=i1,此时电压方程为(1)转矩方程为(2)模式二:功率管t关断,在t1<t<t2时二极管续流,ia=i2,系统方程有(3)(4)模式三:t2<t<t电机处于惯性滑行阶段(5)(6)3 控制系统设计基于plc的直流电机控制系统框图如图3所示。
基于PLC控制的直流电动机调速系统的设计毕业设计
本科毕业设计说明书基于PLC控制的直流电动机调速系统的设计DESIGN OF DC SPEED CONTROL SYSTEM BASED ON PLC学院(部):电气与信息工程学院专业班级:自动化08-2学生姓名:#####指导教师:######副教授2012 年 5 月30 日毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
基于PLC的直流电机调速系统设计方案

基于PLC的直流电机调速系统设计方案
设计方案如下:
1. 硬件设计:
- 选择一块适配的PLC控制器作为主控制单元;
- 选择适配的直流电机作为驱动装置;
- 选择适配的输入输出模块,包括数字输入模块和模拟输出模块;
- 选择适配的传感器,如速度传感器和电流传感器。
2. 系统连接:
- 将输入模块与传感器连接,以便获取所需的输入信号; - 将输出模块与驱动装置连接,以控制电机的速度;
- 将PLC控制器与输入输出模块连接,以实现信号的采集和控制命令的输出。
3. 系统控制:
- 编写PLC控制程序,包括数据采集、数据处理和控制输出等部分;
- 设计调速算法,根据所需的速度控制要求,计算控制输出;
- 根据实际情况进行参数调整和校正,以达到较好的调速效果。
4. 系统测试:
- 对整个系统进行测试,包括信号采集、数据处理和控制输出等部分;
- 测试系统的响应速度、稳定性和精度,根据实际情况进行参数调整和校正。
5. 安全保护:
- 在设计中考虑安全保护措施,如过电流保护、过温保护等;
- 在控制程序中添加故障检测和报警功能,以及急停功能。
最后,根据具体的应用要求和实际情况,可以对设计方案
进行扩展和改进。
基于PLC电机测速系统的设计
件 C — mg mm r 控 功 能 进 行 数 据 读 取 。 X P a e监
()L 2 P C输 出显示 。P C输 出显示采 用动态扫描法 实现 , L 外接 4位 8段数码显示管 , 逐位输 出相 关进制位到各数显管 。
3 软 件设 计
本系统为 准确测量霍尔传 感器 的输 入脉 冲 ,快 速计算 出 电机转速 , 主要包括 下面 3个 大流程 : 计数初始 化 , 冲记数 , 脉 数据运算 存储 ( 如图 2所示 ) 。
了电机测 速 系统的基 本工作 原 理及硬件 构 成 , 并编 写 了相 应的程序 , 系统构 建成 本低 , 可获得 高精度 和 高 可靠性 的 电机速 度测 且
试数据 。
关 键 词 :L 电机 转 速 ; 尔传 感 器 P C; 霍 中图 分 类号 : 0 TM3 6 文 献 标 识 码 : A 文 章 编 号 :6 2 5 5 2 1 0 — 0 7 0 1 7 — 4 X( 0 8 0 6 — 1 0)
m
嗍∞ 柏g ∞ TO 00 0
I l
— PH1 ) ‘
# 9
60
2 硬 件结 构
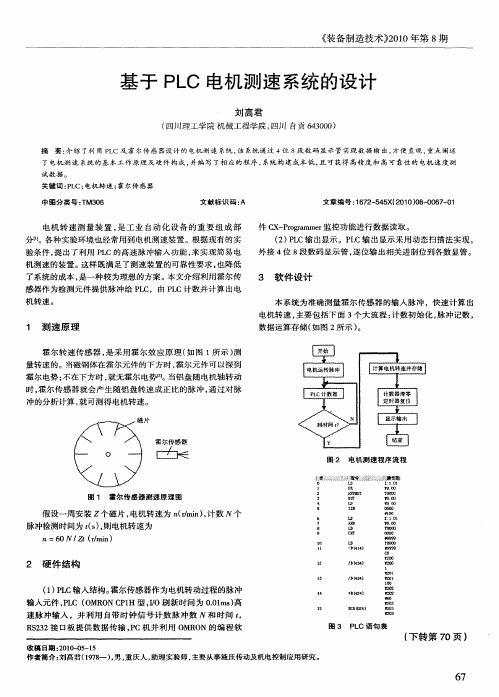
() L 1 P C输入结构 。 尔传感器作为 电机转 动过程 的脉 冲 霍 输入 元件 ,L ( MR NC 1 P C O O P H型 , O刷新时 间为 O0 m ) I / .1 s 高 速 脉 冲输人 ,并 利用 自带时 钟信 号计 数脉 冲数 Ⅳ 和时 问 t ,
f2 o3
图 3 P C 语 句 表 L
( 转第 7 下 0页 )
收稿 日期 :0 00 — 5 2 1 - 5 1 作者简介 : 高君( 9 8 )男 , 庆人 , 刘 17 一 , 重 助理 实验师 , 主要从 事液压传动及机 电控制 应用研究 。
一种基于PLC的电机速度检测和显示的新方法剖析
一种基于PLC的电机速度检测和显示的新方法剖析发表时间:2016-08-30T17:02:35.343Z 来源:《建筑建材装饰》2015年8月下作者:陈先鸿[导读] 原有的测速和显示方式要安装特殊的电子设备,通常其存在安装成本花费较大。
陈先鸿(安徽省产品质量监督检验研究院,安徽合肥230601)摘要:当前时期,PLC(可编程逻辑控制器)作为工业中重要的控制装置,提供给自动化控制相对安全且健全的控制途径。
电机转速的精准检测和显示非常关键,已经变成当前工业自动化中不可或缺的部分。
本文简要剖析了可以得到可靠性高,还可以减少运行成本的电机速度检测与显示新方式,力求为今后的相关工作提供参照。
关键词:PLC;转速检测;数字显示前言原有的测速和显示方式要安装特殊的电子设备,通常其存在安装成本花费较大,检测精度与可靠性不足、检测环节相对繁杂的问题。
基于工业生产条件下可靠性较高的特征,实行主要程序设计,能够满足电机转速检测与显示要求。
此举不仅可以提升电机速度检测与显示可靠性,还可以减少检测成本,属于一类相对合理的数字检测与显示模式。
1测速与数据传输变换原理数字检测过程中,转动脉冲发生器是电机转速或者转角测量的设备。
其和电动机同轴相连,电动机工作的时候,转动脉冲发生器一同转动,则产生转速信号。
转动脉冲发生器属于一类利用光电转化把输出轴的位移量转化为数字量的器件。
通过光电编码器检测电机速度的方式有很多,此处应用测频方式。
样本采集时间T之内收到脉冲数目为K,进而计算期间内电机的平均转速,通常称作M法速度检测方式,那么电动机的转速n(转/分钟)公式可以写成:N=k/tz (1)式中,n表示电动机转速,Z表示电动机转动每圈编码器发出的脉冲数目。
电动机速度检测成效通常由电动机转动每圈编码器发出的脉冲数目、加工精准度以及安装精准度来决定。
当电动机转动每圈编码器发出的脉冲数目比较都的时候适宜选取M测速法。
M测速法的电机速度测量量化误差1/M,这个量化误差取决于加工精准度和输出脉冲前沿以及速度检测时间内的样本采集脉冲前沿差异的因素,最多是一个脉冲的偏差。
课程设计基于单片机的直流电机测速调速及显示系统设计

基于单片机的直流电机测速、调速及显示系统设计课程设计报告题目:基于单片机的直流电机测速、调速及显示系统设计摘要本文要紧研究了利用Quick51系列单片机操纵PWM信号从而实现对直流电机转速进行操纵的方式。
单片机具有体积小、功能强、本钱低、应用面普遍等优势,能够说,智能操纵与自动操纵的核心确实是单片机。
目前,一个学习与应用单片机的高潮在全社会大规模地兴起。
学习单片机的最有效方式确实是理论与实践并重,本文用8051单片机自制了一个采纳了专门的芯片组成了PWM信号的发生系统,而且对PWM信号的原理、产生方式和如何通过软件编程对PWM信号占空比进行调剂,从而操纵其输入信号波形等均作了详细的论述。
还对直流电机的速度进行了测量和显示。
关键词:单片机、PWM、调速、测速、显示系统目录摘要 (1)目录 (2)第一章概述 (3)1.1概述 (3)Quick51的技术简介和进展前景 (3)1.2.1 SmartSOPC与Quick51 (3)1.2.2 Quick51特性 (4)第二章整体方案设计 (5)8051单片机简介 (6)PWM信号发生电路设计 (12)2.2.1 P WM的大体原理 (12)128*64液晶显示 (13)第三章硬件设计与连接 (13)传感器电路设计 (13)信号处置电路设计 (16)存储器电路设计 (17)I2C总线概述 (17)存储器电路 (18)显示电路设计 (18)PWM信号发生电路设计 (19)第四章软件设计 (20)系统软件总流程图 (20)程序清单 (21)答辩问题 (22)第一章概述1.1概述本文要紧研究了利用Quick51系列单片机,通过PWM方式操纵直流电机调速的方式。
冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其成效大体相同。
PWM操纵技术确实是以该结论为理论基础,使输出端取得一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形。
按必然的规那么对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
一种基于PLC的电机转速测量电路设计
毕业设计(论文)论文题目:一种基于PLC的电机转速测量电路设计教学点:指导老师:职称:学生姓名:学号:专业:学校成教院制20 年 1月 12 日题目:一种基于PLC的电机转速测量电路设计任务与要求:工业现场往往存在许多的干扰因素,因此工业测控系统中普遍采用数字式转速测量方法.目前plc因其高可靠性已经成为工业控制的一个重要设备。
采用plc测量电机转速可以保证测量的稳定性和高精度。
时间:2010 年 11 月 10 日至 2011 年 1 月 15 日共 9 周教学点:学生姓名:学号:专业:电气自动化技术指导单位或教研室:电气自动化教研室指导教师: 职称:讲师学校成教院制毕业设计(论文)进度计划表本表作评定学生平时成绩的依据之一。
摘要介绍电机转速测量电路的设计方案,对其软硬件的实现方法进行了介绍,该系统在实际工程应用中,具有较好的稳定性和精度。
转速是电动机重要的基本状态参数,在很多运动系统的测控中,都需要对电机的转速进行测量,测量的精度直接影响系统的控制情况,只有转速的高精度检测才能得到高精度的控制系统。
目前工业中测量转速的方式主要有两种。
一种是将转速转化为模拟信号,对模拟信号进行测量。
如测速发电机是将转速直接转换为电压信号,然后测量其电压。
这种方法的缺点是被测信号易受电磁干扰和温度变化的影响。
另一种是将转速信号转化为脉冲信号,然后用数字系统内部的时钟来对脉冲信号的频率进行测量.这种方法的优点在于抗干扰能力强、不受温度变化影响、稳定性好。
工业现场往往存在许多的干扰因素,因此工业测控系统中普遍采用数字式转速测量方法。
目前plc因其高可靠性已经成为工业控制的一个重要设备。
采用plc测量电机转速可以保证测量的稳定性和高精度。
关键词:PLC、转速测量、稳定性、高精度(基于PLC的电机转速测量电路设计)ABSTRACTThe paper presents a design to measure speed of motor based on PLC,and also introduces the project of the design and implementation method of the software and hardware.This systems applied to engineering and acquires a very good result.Start in the process,if a failure occurred,the protection PLC corresponding action. Start after the completion of "motor on / off indicator light" the electrical normal operation. Running process, PLC followed by motor cycle test whether there has been a phase short circuit,breaking phase,low-voltage, single—phase - to—ground, overload,over—current fault, and so, if occurred, PLC protection action accordingly. Shutdown, PLC received shutdown orders, tripping circuit breakers, "Motor on / off indicator light” eliminate. Fault sound and light alarm at the ”Alarm reset button” reset. This choice is based on the design of the motor PLC fault diagnosis system design。
基于PLC实现的电动机调速控制

综合实验实验报告实验名称:基于PLC实现的电动机调速控制基于PLC实现的电动机调速控制实验报告一、实验目的:通过综合实验的训练,学会独立的设计和处理问题的能力二、实验原理:1.PLC编程控制原则2.PLC工作手册3.光电编码器原理图三、实验步骤:1.设计答疑2.绘制系统原理图,接线图,系统流程图3.编写系统程序,调制4.按图接线,实现设计要求5.绘制各元件及PLC、变频器、编码器接线端口明细表四、实验器材本实验提供的元器件:PLC一台、变频器一台、三相电机一台、光电编码器五、实验要求效果六、实验结果报告1.系统原理图2.PLC与变频器接线3.接线图4.程序流程图开始正转/反转加 速=30HZ ?匀速5s加 速=50HZ ?匀速5s减 速匀速5s结 束=30HZ ?光电编码器光电编码器YYYNNN光电编码器5.PLC设置序号功能码功能定义设定值1 F100 用户密码82 F140 端子方向启动 13 F200 启动控制 14 F202 停机控制 15 F204 基本调速方式 26 F206 方向给定 27 F400 OP1端子输入信号08 F401 OP2端子输入信号09 F402 OP3端子输入信号010 F403 OP4端子输入信号011 F404 OP5端子输入信号012 F405 OP6端子输入信号013 F406 OP7端子输入信号014 F407 OP8端子输入信号015 F408 OP1功能设定1116 F409 OP2功能设定017 F410 OP3功能设定 118 F411 OP4功能设定1219 F412 OP5功能设定1320 F413 OP6功能设定1421 F414 OP7功能设定722 F415 OP8功能设定176.编码器原理图7.程序七、实验心得(见附页)。
基于PLC的直流电机调速控制器设计

基于PLC的直流电机调速控制器设计作者:郝结来谢军来源:《江苏理工学院学报》2018年第06期摘要:基于PLC的直流电机调速控制器以三菱FX2N为核心,通过定时器T246和T247实现了PWM波的输出功能,使PWM输出不受输出继电器的限制。
系统设置了启动开关自锁按键,三档位速度控制旋钮。
通过软件继电器M0实现了软件程序启动自锁,防止启动开关异常时程序无法启动的问题。
设置系统启动指示灯和电机启动指示灯,便于用户知晓系统工作是否正常。
通过对6 V小型直流电机的实验,论证了该控制器能够达到较好的控制效果。
关键词:PLC;PWM;定时器;电机调速中图分类号:TM925.11;TP273 文献标识码:A 文章编号2095-7394(2018)06-0047-05直流电机在生产生活中应用广泛,对直流电机的速度调控只需要控制电机的工作电压即可[1],这也是其应用广泛的一个重要原因。
利用PWM脉宽调制方法,可方便地控制负载端的平均电压,在脉冲的低电压趋近于0时,负载的平均电压与PWM的占空比成正比[2-4]。
三菱FX2N型PLC是一款小型高性能的超小程序裝置,具有配置固定灵活,编程简单,高性能与高运算速度等特点,具有丰富的软件定时器与软件继电器,可满足多样化广泛需求。
1 PWM输出与PLC配置1.1定时器PWM输出配置定时器PWM波输出配置PWM波是周期变化的方波信号,其占空比可调,通过调节占空比可实现不同平均电压的输出[5-7]。
PWM波形函数可表示为:在PLC中可使用高速定时器完成PWM波的输出功能,三菱FX2N型PLC内部集成有PWM输出功能[ PWM S1 S2 D],其中S1用于指定脉冲的宽度,S2用于指令脉冲的周期,单位都为 ms,取值范围为0~32767,S1应小于等于S2。
D用于指令脉冲输出端口,FX2N晶体管输出型PLC仅能使用Y0和Y1作为PWM输出口。
在保证PWM输出性能的情况下,选择使用高速定时器可克服上述缺陷。
基于PLC的直流电机测速系统
课程设计报告课程名称微机控制技术课程设计设计题目电机测速系统设计专业班级自动化0842姓名王晓明学号**********指导教师蔡长青、王瑾、张卓、王文涛起止时间2010.12.26—2011.01.06电气与信息学院课程设计考核和成绩评定办法1.课程设计的考核由指导教师根据设计表现、设计报告、设计成果、答辩等几个方面,给出各项权重,综合评定。
该设计考核教研室主任审核,主管院长审批备案。
2.成绩评定采用五级分制,即优、良、中、及格、不及格。
3.参加本次设计时间不足三分之二或旷课四天以上者,不得参加本次考核,按不及格处理。
4.课程设计结束一周内,指导教师提交成绩和设计总结。
5.设计过程考核和成绩在教师手册中有记载。
课程设计报告内容课程设计报告内容、格式各专业根据专业不同统一规范,经教研室主任审核、主管院长审批备案。
注:1.课程设计任务书和指导书在课程设计前发给学生,设计任务书放置在设计报告封面后和正文目录前。
2.为了节省纸张,保护环境,便于保管实习报告,统一采用A4纸打印(正文采用宋体五号字)或手写。
10/11学年第一学期微机控制技术课程设计任务书指导教师:蔡长青班级:自动0841、2 地点:3101、工训512课程设计题目:电机测速系统一、课程设计目的本课程设计的目的在于培养学生运用已学的微机控制技术的基础知识和基本理论,加以综合运用,进行微机控制系统设计的初等训练,掌握运用微机控制技术的原理、设计内容和设计步骤,为从事相关的毕业设计或今后的工作需要打下良好的基础。
二、课程设计内容(包括技术指标)1.用PLC设计并制作一个电机测速系统,上位机组态软件能够设定不同的电机转速并且显示实时速度。
具体如下:通过按键能设定3~5个电机转动速度,PLC和上位机组态软件连接,PLC 通过控制变频器输出不同频率三相电使电机转动起来,然后通过旋转编码器测量电机速度,旋转编码器输出接PLC高速计数输入通道,计算当前电机转速,并在上位机组态软件中上显示出来。
直流电机调速的PLC控制
直流电机调速的PLC控制背景:使用直流电机有许多优点如:电机调速经济,控制方便;机械特性较硬,稳定性较好;PLC电动机转速控制可以完成了液位控制、直流电动机旋转控制组态图,使得操作人员通过计算机屏幕对现场的运行情况一目了然。
用户可以通过组态图随时了解、观察并掌握整个控制系统的工作状态,必要时还可以通过界面向控制系统发出故障报警,进行人工干预。
一、硬件输入输出接口电路实际上是PLC与被控对象间传递输入输出信号的接口部件。
输入输出接口电路要有良好的电隔离和滤波作用。
1.输入接口电路输入输出信号分为开关量、模拟量及数字量。
可编程控制器的一个重要特点就是所有的输入输出信号全部经过了隔离,无论任何形式的输入输出最终都是经过光电偶合口或继电器将信号传入/送出PLC。
由于生产过程中使用的各种开关、按钮、传感器等输入器件直接接到PLC输入接口电路上,为防止由于触点抖动或干扰脉冲引起错误的输入信号,输入接口电路必须有很强的抗干扰能力[1]。
2.输出接口电路根据驱动负载元件不同可将输出接口电路分为三种形式:一种是继电器输出型,CPU接通继电器的线圈,继而吸合触点,而触点与外线路构成回路;另一种是晶体管输出,它是通过光偶合使开关晶体管通断以控制外电路;再一种就是可控硅输出型,这里的可控硅是采用光触发型的。
二、软件第一部分为系统监控程序。
它是每一个可编程控制器成品必须包括的部分,是由可编程控制器的制造者编制的,用于控制可编程控制器本身的运行。
另一部分为用户程序。
它是由可编程控制器的使用者编制的,用于控制被控装置的运行。
这里主要介绍监控程序。
系统管理程序是监控程序中最重要的部分,整个可编程控制器的运行都由它主管。
管理程序又分为三个部分:第一部分是运行管理,控制可编程控制器何时输入、何时输出、何时自检等等,进行时间上的分配管理。
第二部分进行存储空间的管理,即生成用户环境,由它规定各种参数、程序的存放地址,将用户使用的数据参数存储地址转化为实际的数据格式及物理存放地址。
基于PLC技术的直流电机转速控制系统设计

基于PLC技术的直流电机转速控制系统设计目录一、内容概括 (2)1.1 直流电机简介 (2)1.2 PLC技术概述 (3)二、系统需求分析 (4)2.1 控制要求 (6)2.2 性能指标 (6)三、系统设计 (7)3.1 系统结构设计 (9)3.2 PLC选型与配置 (10)3.3 传感器模块设计 (11)3.4 人机界面设计 (13)四、控制算法设计 (14)4.1 PID控制算法原理 (15)4.2 PID参数整定方法 (17)4.3 控制算法实现 (18)五、系统实现与调试 (20)5.1 系统搭建 (21)5.2 调试过程 (22)5.3 调试结果分析 (23)六、系统测试与应用 (24)6.1 测试环境与方法 (26)6.2 测试结果分析 (26)6.3 系统应用场景探讨 (28)七、总结与展望 (29)7.1 系统总结 (30)7.2 未来展望 (31)一、内容概括本文档主要探讨了基于PLC技术的直流电机转速控制系统的设计方案。
介绍了直流电机的基本原理和转速控制的重要性,以及PLC 技术在工业自动化中的广泛应用。
详细阐述了系统设计的目标、硬件选型、软件设计和实现方法。
在系统设计目标中,我们强调了高精度、高稳定性和实时性,以满足实际应用中对电机转速控制的高要求。
硬件选型部分,选择了功能强大的PLC作为控制核心,并配置了相应的输入输出模块和传感器,以实现对电机转速的实时监测和控制。
软件设计方面,采用了梯形图编程语言,编写了功能完善的控制程序,包括初始化、速度调节、故障处理等模块。
在实现方法上,我们描述了如何通过PLC编程实现对电机的速度控制,以及如何通过调试和优化,确保系统的稳定运行和高效性能。
本文档旨在为读者提供一个基于PLC技术的直流电机转速控制系统的设计思路和方法,具有一定的实用性和参考价值。
1.1 直流电机简介直流电机(DC Motor)是一种将电能转换为机械能的电动机,广泛应用于各种机械设备中。
PLC在电机转速测量中的应用

PLC在电机转速测量中的应用韩亮【摘要】针对电机的转速测量,提出基于PLC的数字测速方法,即使用光电编码器作为脉冲发生器,利用PLC的高速计数器捕捉光电编码器产生的脉冲数,然后采用定时中断控制时间间隔,再根据M法测速原理,由PLC实时计算电机转速。
实践表明,该数字测速方法实时性好、精度高,可用于需要精确控制电机转速的场合。
%As for the motor speed measurement, this paper presents a digital speed measurement method based on PLC. This method uses photoelectric encoder as pulse generator, high speed counter of PLC to capture the number of pulses, the timer interrupt to control time interval, and then calculates the real-time motor speed by PLC according to the principle of M method for motor speed measurement. It proves that this digital speed measuring method has good real-time and high accuracy, which can be used to accurately control motor speed.【期刊名称】《常州工学院学报》【年(卷),期】2012(025)003【总页数】3页(P36-38)【关键词】PLC;高速计数器;编码器;电机转速【作者】韩亮【作者单位】山西机电职业技术学院电子电气工程系,山西长治046011【正文语种】中文【中图分类】TM571.10 引言在异步电机调速系统中,经常采用转速闭环、磁通开环并带有速度传感器的矢量控制方式。
基于PLC的直流电机双环调速系统
摘要随着电力电子技术、计算机技术、自动控制技术的迅速发展,可编程控制器(PLC)的功能更加完善,应用更为广泛,基于PLC的控制系统渐渐成为工业控制系统的主流。
本文介绍了基于PLC的直流电机双环调速系统,根据直流调速理论及自动控制系统的理论,介绍了PLC控制的双闭环调速系统的组成、工作原理和动态性能。
本系统实现了对直流电机双闭环调速系统进行全数字化的改造,使电流环和速度环控制器都由PLC系统来实现。
重点讨论了用西门子S7-200系列PLC中的CPU222及其两个扩展模块来实现直流电机双闭环调速系统。
应用PLC的PID功能指令来实现直流电机速度的闭环控制。
系统易于扩展,便于扩展各种I/O模块和功能模块。
关键词:可编程控制器;直流电动机;双闭环;控制目录第1章绪论 (1)1.1 直流电动机简介 (1)1.2 双闭环调速系统 (1)1.3 PLC在电机调速中的应用 (2)第2章系统总体设计及算法模型确定 (4)2.1 系统总体设计 (4)2.2 双闭环调速系统常用控制方法介绍 (5)2.3 控制方法的确定 (6)2.3.1 PID控制的结构 (7)2.3.2 PID参数的调整 (9)2.3.3 PID模块 (9)2.4 系统参数计算 (11)2.4.1 主电路参数计算 (11)2.4.2 电流环节(ACR)的设计 (11)2.4.3 转速环(ASR)的设计 (13)2.4.4 按转速环(ASR)退饱和重新计算超调量 (14)第3章硬件设计 (16)3.1 系统总体结构 (16)3.1.1 CPU主机部分 (16)3.1.2 电机驱动部分 (16)3.2 检测部分 (17)3.2.1 电流检测部分 (17)3.2.2 速度检测部分 (18)3.3 数据采集模块 (19)3.3.1 PLC输入/输出端口 (20)3.3.2 用于PLC的输入/输出模块 (22)3.3.3 采集时序控制电路 (23)3.3.4 正交采用 (23)3.3.5 模块量混合模块EM235 (24)3.4 晶体管驱动、触发电路的设计 (24)3.4.1 驱动电路原理 (24)3.4.2 触发电路原理 (24)3.5 稳压电源 (25)第4章软件设计 (26)4.1 系统程序设计方案 (26)4.2 主程序设计 (26)4.3 速度初始化子程序 (27)4.4 转速检测子程序 (29)4.5 电流检测子程序 (29)4.6 PID控制子程序 (30)4.7 电流环及转速换子程序 (31)参考文献 (33)附录A 程序清单 (34)附录B 系统原理图 (38)附录C 元器件清单 (38)总结 (40)第1章绪论1.1直流电动机简介直流电动机调速系统在当前的工业生产中应用相当广泛。
基于PLC电机速度监测的程序设计
基于PLC电机速度监测的程序设计耿博望;祁霞;俞竣瀚【摘要】电机转速是判定电机运行状态的关键参数,也是电机事故频发的主要原因之一,所以对电机的转速进行监测至关重要,以光电编码器作为脉冲发生器,常规PLC 的定时器进行时间间隔,计数器对单位时间内电机高速脉冲进行记数.设计了一种对电机超速或欠速进行监测的应用程序,速度监测方法的优点是;实时性好,精度高.【期刊名称】《电气自动化》【年(卷),期】2016(038)001【总页数】2页(P82-83)【关键词】PLC程序;电机;故障检测;转速测量;光电编码器【作者】耿博望;祁霞;俞竣瀚【作者单位】长安大学电子与控制工程学院,陕西西安710064;长安大学电子与控制工程学院,陕西西安710064;长安大学电子与控制工程学院,陕西西安710064【正文语种】中文【中图分类】TP273电机作为重要的机械设备,在工业生产中大量使用,电机异常现象的发生,不仅影响了生产的持续进行,还对操作人员的安全造成了重大威胁,给工业生产和日常生活带来了巨大的隐患,甚至是灾难,所以严格控制转速是电动机重要的要求,在很多运动系统的测速中,都需要对电机的转速进行监测确保电机能够正常启动、运行。
目前,PLC实现脉冲信号的测量主要是用PLC的高速计数单元[1]来实现,但带有高速记数功能的PLC又相对昂贵,本文采用常规PLC,设计了一种可以进行高速脉冲记数功能的应用程序,实现对电机速度的监测以达到对电机有效的保护。
电机的正常运行对工业生产至关重要,所以对电机事故[2]的预防和排查是非常重要的,电动机在运行过程中的异常现象及处理方式为:电机转速异常的现象有电动机不能启动和启动后处于非正常转速两种情况。
造成电机不能启动的主要原因有:(1) 定子回路一相断线;(2) 转子回路断线或接触不良;(3) 电动机转子或被拖动机械被卡死;(4) 电动机定子回路接线错误。
根据上述可能的原因,首先检查电源是否正常,然后检查开关、闸刀、熔断器及一次回路接线。
用PLC实现电机速度的测量
机床电器 2004. 6
计算机·PLC 应用 ———用 PLC 实现电机速度的测量
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved.
计算机·PLC 应用 ———用 PLC 实现电机速度的测量
机床电器 200416
号和 B 相信号的相位关系进行递增或递减计数 。 若 A 相信号超前 B 相信号 1/ 4 周期 ,则进行递增 计数 ,递增脉冲 :A 相上升沿 →B 相上升沿 →A 相 下降沿 →B 相下降沿 。若 B 相信号超前 A 相信号 1/ 4 周期 ,则进行递减计数 ,递减脉冲 :B 相上升沿 →A 相上升沿 →B 相下降沿 →A 相下降沿 。计数 范围为 - 32767 ~ + 32767 。最高计数频率为 2. 5kHz 。
图 3 流程图
梯形图如图 4 所示 ,程序开始时先采集一次 数据 ,并将其保存在 DM0100 和 DM0101 中 ,接着 开始中断子程序 , 进行第二次数据采集 , 保存在 DM0102 和 DM0103 中 ,然后执行一个减法运算 , 用第二次采集的数据减去第一次采集的数据 ,结 果放在 DM0104 和 DM0105 中 。再进行一次除法 运算 ,除数为 DM0106 中的数据 20 ,速 (下转 46 页)
— 43 —
© 1994-2007 China Academic Journal Electronic Publishing House. All rights reserved.
基于PLC的直流电机调速系统设计
*******学院毕业设计基于PLC 的直流电机调速系统设计学生:学号:专业:班级:指导教师:****学院自动化与电子信息学院********年年摘 要设计选用日本三菱公司设计选用日本三菱公司设计选用日本三菱公司FX FX 2N -16MT -16MT基本单元和基本单元和基本单元和FX FX 2N -4AD -4AD,,FX 2N -2DA -2DA 模拟量输模拟量输/输出扩展模块,并利用其功能指令设计的直流脉宽双闭环调速系统,实现了调速过程速度快、精度高速过程速度快、精度高,,控制系统的参数便于调试和高工作可靠性,通过给定的调速系统硬件配置和梯形图,经模拟调试输出信号验证了各项指标均满足调速系统的要求。
统的要求。
关键词:PLC PLC;调速系统;应用;调速系统;应用;调速系统;应用3 ABSTRACTThe The double double double closed-loop closed-loop closed-loop DC DC PWM speed speed system system system of of of direct direct direct motor motor motor uses uses uses the the FX 2N -16MT basic unit unit of Japanese Mitsubishi company and FX of Japanese Mitsubishi company and FX2N -4ADs, FX 2N -2DA emulation emulation input/ input/ input/ output expanding output expanding mold mold , , , making making making use use use of of of its its its function function function instruction. instruction. instruction. It It realizes fast adjust mend of the speed course , high precision, which make it easy to debug control procedure and work reliable, which is a development direction in the industrial control. Hardware disposition and ladder chart are given in this text. It can be adjusted adjusted by by by emulation emulation emulation and and and various various various index index index signs signs signs of of output output signal signal signal all all all satisfy satisfy satisfy the the requirements of the adjust system. Key words :PLC ;A djusting Speed System ;A pplication目录1.1 直流调速系统的发展史概述直流调速系统的发展史概述............................................................................................ 5 1.2 可编程控制器PLC .. (6)6 1.2.1 PLC 的发展概述 ..................................................................................................... 6 6 1.2.2 PLC 的特点 . (7)7 1.3 选题背景及论文主要内容选题背景及论文主要内容................................................................................................ 8 1.3.1 选题背景选题背景................................................................................................................. 8 1.3.2 论文的主要内容论文的主要内容..................................................................................................... 8 第 2 2 章章 直流调速系统直流调速系统............................................... ...............................................10 2.1 调速系统的性能指标调速系统的性能指标...................................................................................................... 10 2.1.1 稳态性能指标稳态性能指标....................................................................................................... 11 2.1.2 动态指标动态指标............................................................................................................. 12 2.2 PWM 直流调速系统 .. (14)14 2.2.1 直流电动机的PWM 控制原理 (14)14 2.2.2 PWM 直流调速系统的组成 (15)15 2.2.3 PWM 调速系统的主要参数 (21)21 2.3 双闭环直流脉宽调速系统双闭环直流脉宽调速系统.............................................................................................. 23 2.3.1 电流、转速反馈环节电流、转速反馈环节........................................................................................... 23 2.3.2 设计中的调节器计算设计中的调节器计算........................................................................................... 24 2.3.3 双闭环脉宽调速系统的起动过程双闭环脉宽调速系统的起动过程 ...................................................................... 29 第 3 3 章章 现代现代PLC 控制技术控制技术.......................................... ..........................................31 3.1 PLC 的组成和分类 (31)31 3.2 PLC 的工作原理 (31)31 3.3 PLC 电机控制系统设计的基本内容和步骤电机控制系统设计的基本内容和步骤................................................................... 33 3.3.1 PLC 的硬件设计的一般步骤 ............................................................................... 33 33 3.3.2 PLC 软件设计的一般步骤 .. (34)34 3.3.3 设计中用到的模块设计中用到的模块 ............................................................................................... 35 第 4 4 章章 基于基于PLC 的直流电机调速系统设计的直流电机调速系统设计............................ ............................37 4.1 设计任务设计任务.......................................................................................................................... 37 4.2 脉宽调制系统特有部分设计脉宽调制系统特有部分设计 ......................................................................................... 37 4.3 PLC 硬件设计 (38)38 4.4 PLC 软件设计 ................................................................................................................. 40 40 结束语结束语............................................................. .............................................................43 致谢致谢............................................................... ...............................................................44 参考文献(主要及公开发表的文献)参考文献(主要及公开发表的文献).................................... ....................................2 附录附录................................................................ . (4)5 第 1 1 章章 引 言传统直流电动机双闭环调速系统采用的是继电器控制,加传统直流电动机双闭环调速系统采用的是继电器控制,加PI PI PI 调节器及校正调节器及校正装置,实现控制系统稳定运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计报告课程名称微机控制技术课程设计设计题目电机测速系统设计专业班级自动化0842姓名王晓明学号**********指导教师蔡长青、王瑾、张卓、王文涛起止时间2010.12.26—2011.01.06电气与信息学院课程设计考核和成绩评定办法1.课程设计的考核由指导教师根据设计表现、设计报告、设计成果、答辩等几个方面,给出各项权重,综合评定。
该设计考核教研室主任审核,主管院长审批备案。
2.成绩评定采用五级分制,即优、良、中、及格、不及格。
3.参加本次设计时间不足三分之二或旷课四天以上者,不得参加本次考核,按不及格处理。
4.课程设计结束一周内,指导教师提交成绩和设计总结。
5.设计过程考核和成绩在教师手册中有记载。
课程设计报告内容课程设计报告内容、格式各专业根据专业不同统一规范,经教研室主任审核、主管院长审批备案。
注:1.课程设计任务书和指导书在课程设计前发给学生,设计任务书放置在设计报告封面后和正文目录前。
2.为了节省纸张,保护环境,便于保管实习报告,统一采用A4纸打印(正文采用宋体五号字)或手写。
10/11学年第一学期微机控制技术课程设计任务书指导教师:蔡长青班级:自动0841、2 地点:3101、工训512课程设计题目:电机测速系统一、课程设计目的本课程设计的目的在于培养学生运用已学的微机控制技术的基础知识和基本理论,加以综合运用,进行微机控制系统设计的初等训练,掌握运用微机控制技术的原理、设计内容和设计步骤,为从事相关的毕业设计或今后的工作需要打下良好的基础。
二、课程设计内容(包括技术指标)1.用PLC设计并制作一个电机测速系统,上位机组态软件能够设定不同的电机转速并且显示实时速度。
具体如下:通过按键能设定3~5个电机转动速度,PLC和上位机组态软件连接,PLC 通过控制变频器输出不同频率三相电使电机转动起来,然后通过旋转编码器测量电机速度,旋转编码器输出接PLC高速计数输入通道,计算当前电机转速,并在上位机组态软件中上显示出来。
2.可以结合题目自己发挥,发挥部分须在所选题目的基本要求达到的前提下实现。
3.设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
完整的电路原理图、重要的源程序用附件给出。
三、课程设计原则1.尽可能地满足被控对象的控制要求;2.在满足控制的前提下,力求使控制系统简单、经济;3.保证控制系统安全可靠;四、课程设计步骤1.对控制系统任务和要求作深入的调查研究,明确控制任务;2.对多个可行方案进行比较,选出最佳方案3.进行详细的设计与论证4.给出理论分析与计算5.给出系统总体框图、6.给出核心电路原理图、7.给出主要流程图、8.给出程序清单及有关设计文件9.撰写设计说明书五、时间安排1.课程设计过程中保证出勤。
2.态度认真,积极动脑,主动工作。
3.最后按平时表现、报告质量、答辩成绩,其权重分别为0.2、0.4、0.4综合评定成绩,分优、良、中、及、不及格五个等级。
摘要在电气时代的今天,电动机在工农业生产与人们日常生活中都起着十分重要的作用。
直流电机作为最常见的一种电机,具有非常优秀的线性机械特性、较宽的调速范围、良好的起动性以及简单的控制电路等优点,因此在社会的各个领域中都得到了十分广泛的应用。
本文介绍了利用PLC 及旋转编码器设计的电机测速系统,利用PLC的高速脉冲输入功能实现脉冲计数,并发送至上位机组态王进行计算显示,从而得到电机实时转速。
系统构建成本低,且可获得高精度和高可靠性的电机速度测试数据。
关键词PLC 旋转编码器电机转速组态王AbstractToday at the age of electricity, the motor in industrial and agricultural production and people's daily life plays a very important role. The most common DC motor as a motor, has a very good linear mechanical properties, a wide speed range, the start of a good and simple control circuits, etc., so in all areas of society have been very widely the application.This paper describes the use of PLC and rotary encoder design of motor speed measuring system, the use of the high speed PLC input pulses function realization pulse count, and send the first a unit configuration state calculations show that and get a motor real-time speed. System construction cost low, and can get high precision and high reliability of the motor speed test data.Keywords: Programmable Logic Controller Rotary encoder Motor speed configuration目录1 引言 (1)1.1 研究背景 (1)1.2 设计目的 (1)1.3 设计内容 (1)1.4 设计要求 (1)2 系统方案设计 (2)2.1 方案选择 (2)2.2 系统方案确定 (3)3 系统组成简介 (4)3.1 PLC简介 (4)3.2 变频器简介 (6)3.3 旋转编码器简介 (6)4 系统硬件设计 (8)4.1 变频器的使用 (8)4.2 旋转编码器的使用 (9)4.3 PLC的设置 (10)4.4 组态王的监控 (11)5 系统软件设计 (15)5.1 I/O端子表 (15)5.2 程序流程图 (15)5.3 程序梯形图 (15)6 系统调试 (16)6.1 调试环境 (16)6.2 调试过程 (16)6.3 调试结果 (16)总结 (17)致谢 (18)参考文献 (19)附录一 (20)附录二 (21)1 引言1.1 研究背景在电气时代的今天,电动机为人们所熟知,电动机在工农业生产与人们日常生活中都起着十分重要的作用。
直流电机作为最常见的一种电机,具有非常优秀的线性机械特性、较宽的调速范围、良好的起动性以及简单的控制电路等优点,因此在社会的各个领域中都得到了十分广泛的应用。
电机转速测量装置,是工业自动化设备的重要组成部分。
各种实验环境也经常用到电机测速装置,例如在发电机、电动机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速和瞬时转速。
为了能精确地测量转速外,还要保证测量的实时性,要求能测得瞬时转速方法。
因此转速的检测具有重要的意义。
根据现有的实验条件,提出了利用PLC 的高速脉冲输入功能,来实现简易电机测速的装置。
这样既满足了测速装置的可靠性要求,也降低了系统的成本,是一种较为理想的方案。
本设计利用旋转编码器作为检测元件提供脉冲给PLC,由PLC 计数并由上位机计算出电机转速。
1.2 设计目的本课程设计的目的在于培养学生运用已学的微机控制技术的基础知识和基本理论,加以综合运用,进行微机控制系统设计的初等训练,掌握运用微机控制技术的原理、设计内容和设计步骤,为从事相关的毕业设计或今后的工作需要打下良好的基础。
1.3 设计内容用PLC设计并制作一个电机测速系统,上位机的组态软件通过按键能设定3~5个电机转动速度,PLC和上位机组态软件连接,PLC通过控制变频器输出不同频率三相电使电机转动起来,然后通过旋转编码器测量电机速度,旋转编码器输出接PLC高速计数输入通道,PLC通过计数脉冲数发送给上位机,通过上位机组态软件计算当前电机转速,并在上位机组态软件中上显示出来。
1.4 设计要求本设计要求能实现实时测量,并且测量准确;能用上位机实现电动机转速的控制,包括电动机的启动、停止控制,并且要求最少有三级调速;最后还能正确的显示出当前输出频率下的当前测量速度,实现比较的作用。
同时在满足控制的前提下,力求使控制系统简单、经济,保证控制系统安全可靠。
2 系统方案设计2.1 方案选择2.1.1 方案一图2-1 方案一单片机控制方框图方案一由传感器、处理器和显示三部分组成。
其方框图如图2-1所示。
此方案的测速系统主要是由开关型霍尔传感器以及磁钢配合来检测电机的转速。
工作方式为:将磁钢安装在电机的转轴上,而霍尔传感器则放在转轴的旁边,霍尔传感器连接在电路中,当磁钢随转轴经过霍尔传感器时,有开关型霍尔传感器的原理知,此时将输出一个低电平信号;而当磁钢厉害霍尔传感器后,又将输出一个高电平。
这样通过高低电平的转换,将其送入单片机后就可以测量它的转速。
2.1.2 方案二图2-2 方案二PLC控制方框图用PLC设计并制作一个电机测速系统,上位机组态软件能够设定不同的电机转速并且显示实时速度。
其方框图如图2-2所示。
具体如下:通过按键能设定3~5个电机转动速度,PLC和上位机组态软件连接,PLC通过控制变频器输出不同频率三相电使电机转动起来,然后通过旋转编码器测量电机速度,旋转编码器输出接PLC高速计数输入通道,计算当前电机转速,并在上位机组态软件中上显示出来。
2.2 系统方案确定通过比较两种方案的优缺点,根据现有的实验条件,方案二利用PLC可以实现简易的电机测速装置,同时可用上位机进行是实时监控,这样既满足了测速装置的可靠性要求,也降低了系统的成本,是一种较为理想的方案。
因此本设计采用方案二来实现电机的测速。
3 系统组成简介3.1 PLC简介可编程控制器(Programmable Controller)是计算机家族中的一员,是为工业控制应用而设计制造的。
早期的可编程控制器称作可编程逻辑控制器(Programmable Logic Controller),简称PLC,它主要用来代替继电器实现逻辑控制。
随着技术的发展,这种装置的功能已经大大超过了逻辑控制的范围,因此,今天这种装置称作可编程控制器,简称PC。
但是为了避免与个人计算机(Personal Computer)的简称混淆,所以将可编程控制器简称PLC。
PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。