windows下搭建ARM开源开发环境
Windows 下OpenJtag OpenOCD Eclipse 集成环境安装

Windows 下OpenJtag OpenOCD Eclipse 集成环境安装windows下openjtagopenocdeclipse集成环境安装Windows下openjtag+openocd+eclipse集成环境的安装1.windows下的arm编程的集成环境有两种。
一种使用armcc编程的。
其汇编语言采用arm公司规定的标准。
使用其的集成环境有ads/realview/keilc等,一般与其集成的硬件调试器有简易的并口jtag调试,或基于usb的jlink调试器。
在硬件调试和集成环境起中介的调试软件有h-jtag/jlink-rdi.另一个主要架构是使用arm elf GCC编译程序。
其编译直接采用GNU编译。
使用的集成环境是eclipse。
集成硬件调试器是openjtag。
在集成环境和硬件中,调试器和中介功能是调试openocd等软件。
后者的一大优点,在linux/windows多个平台都能用使用,而且汇编与linux内核,u-boot一样的格式。
还是很有优点的。
有关eclipse的安装,请参阅我的文章()这里重点在于openocd/openjtag的安装,以及与eclipse的集成。
openjtag安装Openjtag是一个基于USB的硬件调试器,因此驱动程序主要在安装过程中安装。
Openocd安装openocd是一个开源的调试软件。
使用它首先安装openocd本身(openocd-r717-20210619.exe)arm-elf-gcc/arm-elf-gdb/newlib(02.yagarto-bu-2.18_gcc-4.2.2-c-c++_nl-1.16.0_gi-6.8.50_20220408.exe)make工具(03.yagarto-tools-20210303-setup.exe)openocd的配置这里,最常用的S3C2440用于处理和安装门配置cfg的openjtag。
Windows_CE_6.0搭建开发环境及模拟器的使用

Windows Embedded CE 6.0开发环境搭建过程1、先装Visual Studio 2005, 我拿到的是Professional Edition 英文版的。
需要使用虚拟光驱软件加载后再安装,公司目前存在的另一个以散装文件的方式提供的安装后无法安装升级,最后在编译和下载内核的时候会出现问题。
安装过程中最好别用DEFAULT安装,把组件CUSTOM一下,不然会花很多冤枉的磁盘空间。
WINCE600的Platform Builder不像WINCE500是独立的,而是作为VS2005的插件,以后建立和定制OS、编译调试全部在VS2005里完成。
在此之前如果你已经安装了Wince6.0 的话,建议你将它卸载干净,等第一步和第二步都顺利完成之后再重新安装。
因为Wince6.0的PB是作为VS的一个插件存在的。
2、安装Visual Studio 2005 Service Pack 1, 这是必须的装的, Release Note 里面提到SP1提供了Windows Embedded 6.0 platform and tools support。
不同的VS2005版本(Standard / Professional / Tem Edition) 会对应到不同的下载上,不过目前这个版本可以同吃以上多种版本,官方命名为:VS80sp1-KB926601-X86-ENU.exe,如果你的操作系统是Vista版本的话,你需要去微软的官方网站重新下载,因为这个版本只是针对XP操作系统升级的包。
安装升级包的时间比较长,需要耐心等待!3、安装MSDN,从VS2005的安装页里选择。
新版的MSDN界面功能看起来比较酷,但CE6的Product Documentation写得实在潦草,不少细节貌似没写清楚,所以这里建议选上CE5的产品文档留着以后作参考。
4、安装Windows Embedded CE 6.0。
应用程序开发人员可以不装,可以利用CE6生成的SDK 来工作;但是不装的话,恐怕无法在本地MSDN得到CE6的产品文档,另外还有PUBLIC 目录下丰富的application sample code了。
ARM开发环境搭建 eclipse for arm实验报告
实验报告实验题目ARM开发环境搭建 eclipse for arm姓名:学号:课程名称:所在学院:专业班级:任课教师:一、实验目的与要求:1、掌握 ARM 汇编语言的基本使用和一些伪指令的使用;2、熟悉 eclipse 开发工具建立汇编工程和仿真;四、实验过程、步骤及内容1、win7环境安装FS_JTAG工具(1)安装GCC 编译工具双击安装“华清远见-CORTEXA9 资料\工具软件\Windows\FS-JTAG\Yagarto 工具包”目录下的文件:yagarto-bu-2.21_gcc-4.6.2-c-c++_nl-1.190_gdb-7.3.1_eabi_20111119.exe(2)装Yagarto 工具包双击安装“华清远见-CORTEXA9 资料\工具软件\Windows\FS-JTAG\Yagarto 工具包”目录下的文件:yagarto-tools-20100703-setup.exe(3)安装FS_JTAG调试软件双击“x包”下的setup.exe安装FS_JTAG工具(4)安装FS_JTAG驱动将FS_JTAG通过USB线与PC连接,右键点击“我的电脑”选择“管理”,在左侧栏里选择“设备管理”选择“其他设备”右键点击选择“更新驱动”选择“浏览计算机以查询驱动程序软件(R)”;点击浏览选择“FS-JTAG 调试工具(安装包)\DRIVER”目录主要“包括子文件夹”必须选择,点击“下一步”。
安装过程出现上图提示,点击“始终安装此驱动程序软件(I)“继续安装点击“关闭“完成安装注意:此安装过程需要进行 3 次,直到设备管理器中没有叹号标记或未知设备。
这是设备管理器中会出现如下选项:如果下面选项没有全部出现,右键点击有黄色叹号的选项更新驱动,过程同上。
(5)安装JRE双击安装“华清远见-CORTEXA9 资料\ 工具软件\Windows\FS-JTAG\JRE ”目录下的文件: jre-6u7-windows-i586-p-s.exe2、连接硬件平台按下图所示,连接仿真器、USB 转串口线、电源。
第一章 ARM实验板硬件结构与开发环境
6
U15
ADC2
15
RP3
5
JP1 JP2 J1
16
S1
VIN2 VIN1
S2
S3
S4
S5
S6
S7
S8
4
S9 S10 S11 S12 S13 S14 S15 S16 Key
1. 电源插座 2. 外部电压测试端口 3. 按键区域(17个按键) 4. RS232接口 5. 4位数码管 6. 触摸屏接口 7. 液晶屏接口 8. 液晶屏亮度调节旋钮 9. 8个LED灯 10.核心板插座 11.喇叭接口 12.LED灯外部测试端口 13.蜂鸣器 14.电位器区域 15.AD采样源设置跳线 16.外部端口连接区域
DA
RS485
Count
ADC1
1
PWM
RP4 123
RP1
RP2
1
2
3
RS232
二、开发环境
ADS集成开发环境,其成熟版本为ADS1.2。支持软件调试及JTAG硬 件仿真调试,支持汇编、C和C++源程序,具有编译效率高,系统库功 能强等特点。
ADS1.2集成开发环境的组成
名称 代码生成工具 集成开发环境 调试器 指令模拟器 ARM开发包 ARM应用库 描述 ARM汇编器,ARM的C、C++编译器, Thumb的C、C++编译器,ARM连接器 Code Warrior IDE AXD,ADW/ADU,armsd ARMulator 一些底层的程序例子,使用程序 C、C++函数库等 使用方法 由Code Warrior IDE调用 工程管理,编译链接 仿真调试 由AXD调用 由Code Warrior IDE调用 用户程序使用
ARM常用开发环境

功能
声明和初始化一个全局算术变量,初始值为0
声明和初始化一个全局逻辑变量,初始值为{FALSE}
声明和初始化一个全局字符串变量,初始值为空
声明和初始化一个局部算术变量,初始值为0。局部算术变量只
能在宏中进行声明。
声明和初始化一个局部逻辑变量,初始值为{FALSE}。局部逻辑变 量只能在宏中进行声明。
(以上第2~4步任何一步有错都应返回到第1步重来)
汇编语言、汇编语言源程序、目标程序、可执行程序
助记符指令、伪指令
汇编、汇编器(汇编软件、汇编程序)
11/52
符号定义伪指令
符号类型
符号定义 伪指令
2021-8-17
指示符
GBLA GBLL GBLS LCLA
LCLL
LCLS
SETA SETL SETS RLIST
杯内壁,定量转移至250mL容量瓶中,用水稀释至刻度,摇匀。计算锌离子的准确浓 度,贴上标签备用。用移液管移取25.00mL锌离子标准溶液于250mL锥形瓶中,加5mL 缓冲溶液及少量铬黑T指示剂,摇匀,然后用EDTA滴定至溶液由酒红色变为纯蓝色, 即为终点。平行做3次,按下式计算EDTA溶液的物质的量浓度。
2. C/C++语言和汇编语言的混合编程
2021/8/17
ARM常用开发环境
一.基于Windows平台
– ADS ,目前已经基本被替代 – RealView Developer Suite(RVDS)
CodeWarrior IDE+RV Debugger – Embedded Workbench for ARM(EWARM) ,IAR
1.EDTA溶液的配制和标定 (1)0.01mol•L-1 EDTA溶液的配制
《Android应用开发教程 第2版》课后习题参考答案
《Android应用开发教程第2版》课后习题参考答案第一章1.主流的Android版本有哪些,各有何特点?Android最早的一个发布版本开始于2007年11月的Android 1.0 beta,其后发布了多个更新版本。
这些更新版本都在前一个版本的基础上修复了bug并且添加了前一个版本所没有的新功能。
从2009年4月开始,Android操作系统改用甜点来作为版本代号,这些版本按照大写字母的顺序来进行命名:纸杯蛋糕(Cupcake)、甜甜圈(Donut)、闪电泡芙(Éclair)、冻酸奶(Froyo)、姜饼(Gingerbread)、蜂巢(Honeycomb)﹑冰激凌三明治(Ice Cream Sandwich)、雷根糖(Jelly Bean)、奇巧(KitKat)、棒棒糖(Lollipop)、棉花糖(Marshmallow)、牛轧糖(Nougat)、奥利奥(Oreo )、馅饼(Pie)等。
此外,Android操作系统还有两个预发布的内部版本,它们分别是铁臂阿童木(Astro)和发条机器人(Bender)。
2.Android的系统结构如何?由里向外有如下几层:1.Linux Kernel(Linux内核)Android是在Linux2.6的内核基础之上运行的,提供核心系统服务:安全、内存管理、进程管理、网络组、驱动模型。
2.Android Runtime(Android运行时)内核之上是核心库和一个叫做Dalvik的JAVA虚拟机。
核心库提供了Java语言核心库中包含的大部分功能,虚拟机负责运行程序。
3.Libraries(库)Android提供了一组C/C++库,它们为平台的不同组件所使用。
开发人员通过Application Framework来使用这些库所提供的不同功能。
4.Application Framework(应用程序框架)无论Android提供的应用程序还是开发人员自己编写的应用程序,都需要使用到Application Framework。
ARM开发环境

第11章ARM开发环境ADS 1.2
11.1 ADS 1.2简介
ARM ADS全称为ARM Developer Suite,是ARM公司推出的新一代ARM集成开发工具。
现在ADS的最新版本是1.2,它取代了早期的1.1和1.0,除了可以安装在windows NT4、windows 2000、windows 98和windows95操作系统下,还支持windows ME和windows XP 操作系统。
ADS由命令行开发工具、ARM实时库、GUI开发环境(Code Warrior和AXD)、实用程序和支持软件组成。
有了这些部件,用户就可以为ARM系列的RISC处理器编写和调试自己开发的应用程序了。
下面介绍ADS的各个组成部分。
11.1.1 命令行开发工具
这些工具完成将源代码编译、链接成可执行代码的功能。
ADS提供以下命令行开发工具。
1.armcc
armcc是ARM C编译器。
这个编译器通过Plum Hall C V alidation Suite为ARSI C的一致性测试。
armcc用于将用ANSIC编写的程序编译成32位ARM指令代码。
因为armcc是我们最常用的编译器,下面对其进行详细的介绍。
在命令控制台环境下,输入命令:
armcc-help
《ARM嵌入式系统开发典型模块》免费样章。
Eclipse+Keil MDK 3.5 stm32开发入门
Eclipse + Keil MDK 3.5 STM32 软件模拟LED 跑马灯开发入门本人原来一直做JavaEE开发,最近想转到嵌入式开发,经过多方了解,先后了解了ARM7/9,最后选定从Cortex‐M3入手学习,目前市面上Cortex‐M3核的开发板大部分都是意法半导体STM32系列MCU,就以STM32来入门学习,也因为一直做JavaEE开发,对eclipse IDE 开发环境比较熟悉,并且用起来比较顺手,其基于eclipse的C/C++开发工具也很出色,其在后面陆续介绍。
之所以要eclipse+MDK是要用eclipse强大的C开发功能和Keil的调试功能各自的优点。
这也是最近学习所得。
1、开发环境搭建:其开发环境包括eclipse和MDK 开发环境,下面是具体软件的获取和安装方法:Java环境:eclipse是基于java的开发平台,首先系统要安装了Java虚拟机(JRE),到官网下载JRE:/javase/downloads/index.jsp,入图中下载即可,然后默认安装即可。
Eclipse IDE for C/C++ Developers:然后下载eclipse C/C++ IDE,地址是:/downloads/注意要下载windows版的。
只需要下载Eclipse IDE for C/C++ Developers (68 MB),该包已经集成了C/C++插件的,把下载的压缩包接压到任何目录即可,运行解压目录中的eclipse.exe,然后指定其工作区(WorkSpace)目录即可。
Windows下面GCC编译器:适用于Eclipse IDE for C/C++ Developers常用的GCC编译器有Cygwin和MinGW,这里使用Cygwin,以下下载地址:ftp://mcu123:mcu123@ftp:///upload_上传目录/freertos/cygwin_osdev_2009.iso.au/sourceforge/j/ji/jinix/cygwin_osdev_2009.iso或者/project/showfiles.php?group_id=201649&package_i d=277469&release_id=651579以上提供的Cygwin的其GCC版本都是最新版4.3.3,也可以下载其他的但大部分gcc都是3.4的,在本文的使用中其并无影响,这里只使用Eclipse IDE for C/C++ Developers开发功能和Keil的ARM编译器和调试功能。
基于全志H3芯片的ARM开发环境搭建

基于全志H3芯⽚的ARM开发环境搭建基于全志H3芯⽚的ARM开发环境搭建最近买了个友善之臂的NanoPi M1板⼦,⼜在⽹上申请了个NanoPi NEO板⼦,这两个都是基于全志H3芯⽚的Crotex-A7四核ARM开发板,两个板⼦可以共⽤⼀套开发环境,本⽂就以NanoPi NEO为例,简单讲述基于全志H3芯⽚的ARM开发环境搭建。
1. 安装交叉编译⼯具1.1 获取交叉编译⼯具在百度⽹盘中,给出了Nanopi NEO的交叉编译⼯具:注意:第⼀个 gcc-linaro-arm.tar.xz 是⽤友善之臂给出的脚本编译⽣成固件的;如果需要交叉编译⼯具编译应⽤程序或者内核,需要使⽤第⼆个 arm-cortexa9-linux-gnueabihf-4.9.3-20160512.tar.xz ⼯具。
1.2 安装交叉编译⼯具解压:arm-cortexa9-linux-gnueabihf-4.9.3-20160512.tar.xz,得到 4.9.3 ⽬录,与其他平台搭建交叉编译环境⽅法⼀样,将该⽬录复制到 /usr/local/arm/ ⽬录下设置环境变量,在 ~/.bashrc 最后添加:# vim ~/.bashrcPATH=$PATH:/usr/local/arm/4.9.3/bin/export PATH重启或者注销⽤户再登录即可使⽤该交叉编译⼯具。
1.3 验证安装是否成功验证交叉编译⼯具是否安装成功:$ arm-cortexa9-linux-gnueabihf-gcc -vUsing built-in specs.COLLECT_GCC=arm-cortexa9-linux-gnueabihf-gccCOLLECT_LTO_WRAPPER=/usr/local/arm/4.9.3/bin/../libexec/gcc/arm-cortexa9-linux-gnueabihf/4.9.3/lto-wrapperTarget: arm-cortexa9-linux-gnueabihfConfigured with: /work/toolchain/build/src/gcc-4.9.3/configure --build=x86_64-build_pc-linux-gnu --host=x86_64-build_pc-linux-gnu --target=arm-cortexa9-linux-gnueabihf --prefix=/opt/FriendlyARM/toolchain/4.9.3 --with-sysroot=/opt/FriendlyARM/too Thread model: posixgcc version 4.9.3 (ctng-1.21.0-229g-FA)1.4 验证交叉编译⼯具是否能正常编译验证安装的交叉编译⼯具编译的程序在Nanopi NEO板⼦上能够运⾏:1)先写⼀个简单的验证程序,也就是程序员”家喻户晓“的 Hello world!$ cat hello.c#include <stdio.h>int main(void){printf("Hello world!\n");return 0;}2)将程序交叉编译为板⼦能运⾏的程序:$ arm-cortexa9-linux-gnueabihf-gcc hello.c -o hello3)编译完成后⽣成的hello程序,查看⽂件属性:$ file hellohello: ELF 32-bit LSB executable, ARM, EABI5 version 1 (SYSV), dynamically linked, interpreter /lib/ld-linux-armhf.so.3, for GNU/Linux 3.0.8, BuildID[sha1]=e471478037c7cf740dadac9ec82136aad38f0c4e, not stripped2. 将程序通过NFS⽂件系统复制到开发板2.1 先让板⼦连上⽹1)确保板⼦已经能够正常联⽹:# ifconfigeth0 Link encap:Ethernet HWaddr **:**:**:**:**:**inet addr:***.***.*.*** Bcast:***.***.*.255 Mask:255.255.255.0inet6 addr: ****::****:****:****:****/64 Scope:LinkUP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1RX packets:820 errors:0 dropped:0 overruns:0 frame:0TX packets:637 errors:0 dropped:0 overruns:0 carrier:0collisions:0 txqueuelen:1000RX bytes:513171 (501.1 KiB) TX bytes:49921 (48.7 KiB)Interrupt:114lo Link encap:Local Loopbackinet addr:127.0.0.1 Mask:255.0.0.0inet6 addr: ::1/128 Scope:HostUP LOOPBACK RUNNING MTU:16436 Metric:1RX packets:33 errors:0 dropped:0 overruns:0 frame:0TX packets:33 errors:0 dropped:0 overruns:0 carrier:0collisions:0 txqueuelen:0RX bytes:3304 (3.2 KiB) TX bytes:3304 (3.2 KiB)2)ping外⽹,检测是否能和外⽹通讯:# ping PING (163.177.151.110) 56(84) bytes of data.64 bytes from (163.177.151.110): icmp_seq=1 ttl=53 time=11.1 ms 64 bytes from (163.177.151.110): icmp_seq=2 ttl=53 time=10.3 ms 64 bytes from (163.177.151.110): icmp_seq=3 ttl=53 time=10.6 ms ^C--- ping statistics ---3 packets transmitted, 3 received, 0% packet loss, time 2003msrtt min/avg/max/mdev = 10.356/10.740/11.183/0.350 ms2.2 安装NFS服务器并配置NFS⽬录1)安装NFS服务器# sudo apt-get install nfs-kernel-server2)创建NFS⽬录:# vim /etc/exports添加:/mnt *(rw,sync,no_root_squash,no_subtree_check)3)重启NFS服务器:# systemctl restart nfs-kernel-server4)检查nfs是否启动:# ps -aux | grep nfsroot 39 0.0 0.0 0 0 ? S< 14:53 0:00 [nfsiod]root 29118 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29119 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29120 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29121 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29122 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29123 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29124 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29125 0.0 0.0 0 0 ? S 15:55 0:00 [nfsd]root 29142 0.0 0.1 4136 748 ttyS0 S+ 15:56 0:00 grep nfs2.3 通过NFS⽹络服务器传输⽂件通过NFS⽹络服务器挂载,将⽂件拷贝到板⼦上:1)在PC的虚拟机上安装NFS客户端:$ sudo apt-get install nfs-common2)将板⼦的 /mnt/nfs ⽬录挂载到PC虚拟机的 /mnt ⽬录:$ sudo mount -t nfs -o intr,nolock 192.168.4.113:/mnt/nfs /mnt3)将PC虚拟机上编译好的程序拷贝到板⼦上:$ sudo cp hello /mnt在板⼦上的/mnt/nfs⽬录下就可以看到拷贝过来的程序了:# ls /mnthello在开发板上运⾏程序,验证程序是否可以在板⼦上运⾏:# ./helloHello world!验证成功,由交叉编译⼯具编译的程序在板⼦上可以正常运⾏。
windows7下使用gnu工具编译cc 程序的环境搭建msys2
windows7下使用gnu工具编译cc++程序的环境搭建msys2!!!Windows 7下使用GNU工具编译C/C++程序的环境搭建MSYS2本文旨在介绍在Windows下搭建支持C/C++编码的开发环境。
1 概述/distrib/i686/msys2-i686-20161025.exe MSYS2是Windows下的类Unix命令行运行环境。
它提供了pacman包管理器,用pacman可以方便你安装其它程序包或者工具。
MINGW32 和MINGW64 包含GNU编译工具集合,可以用它编译C/C++,Fortran,和其它源代码。
它们的区别之处就是,分别是32位和64位系统下的版本。
它们编译的代码,即使没有MINGW32,MINGW64或者MSYS2提供的运行时库,也可以在Windows下运行。
GCC既可以被MSYS2也可以被Window原生CMD命令调用。
我乐意选择MSYS2,是因为它建立的环境,提供了包管理器,可以方便安装其它编码工具(例如,autoconf 和automake)。
当然了,MINGW32 和MINGW64 也可以单独安装,即使没有MSYS2。
但是,我还是强烈建议使用MSYS2安装。
2 安装MSYS2确保系统上没有mingw 或msys,否则,请卸载它们;运行MSYS2 installer,或者使用sourceforge上的MSYS2 installer(根据自己系统选择对应的版本);安装完成后,请务必不要按照官网给出的步骤,避免产生以下错误。
错误:GPGME error: Invalid crypto engine错误:GPGME error: Invalid crypto engine错误:GPGME error: Invalid crypto engine错误:「mingw32」数据库不正确(数据库不正确或损毁(PGP 签名))错误:「mingw64」数据库不正确(数据库不正确或损毁(PGP 签名))错误:「msys」数据库不正确(数据库不正确或损毁(PGP 签名))按照C:\msys64\etc\pacman.conf 第45至47行的描述:# NOTE: You must run 'pacman-key --init' before first using pacman; the local# keyring can then be populated with the keys of all official Arch Linux# packagers with 'pacman-key --populate archlinux'.你必须先执行命令pacman-key --init接着,换掉C:\msys64\etc\pacman.d\ 的mirrorlist.mingw32,mirrorlist.mingw64 和mirrorlist.msys 里的默认源(这里,C:\msys64要对应于你安装的目录位置),改为以下源:## 32-bit Mingw-w64 repository mirrorlistServer =https:///msys2/mingw/i686/ Server = https:///msys2/mingw/i686/ Server = https:///msys2/mingw/i686/## 64-bit Mingw-w64 repository mirrorlistServer =https:///msys2/mingw/x86_64/ Server = https:///msys2/mingw/x86_64/ Server = https:///msys2/mingw/x86_64/## MSYS2 repository mirrorlistServer = https:///msys2/msys/$arch Server =https:///msys2/REPOS/MSYS2/$arch Server = https:///msys2/msys/$arch然后才能下命令来同步源,并更新pacman -Syuu接着,你就可以愉快地使用了。
Windows下STM32单片机的eclipse编译环境搭建
Windows下STM32单片机的eclipse编译环境搭建英创公司开发的ETA321单片机模块,是基于STM32F103RC单片机设计的实时任务处理单元模块。
ETA321模块作为客户端,使用USB与英创公司的ARM工控主板进行数据传输、通讯,根据工控主板应用程序发出来的指令,执行相应的实时任务处理,如实现:电机控制、数据采集、高速D/A输出、状态采集保护等。
另外,用户可以基于英创公司构建好的USB通讯结构,利用KEIL、IAR、eclipse等集成编译环境,在ETA321模块上编写自己特殊的应用程序。
英创公司推荐使用eclipse编译环境。
由于eclipse软件编译工具是开源、免费的工具,在windows环境下编译linux应用软件的用户也比较多,因此在windows环境中,搭建eclipse的STM32编译环境,就变得非常有意义:可以很好地与linux编译环境进行整合;不用担心开发软件的版权问题;eclipse编译环境也能支持各种调试工具。
因此,使用eclipse编译环境完全替换KEIL、IAR等需要授权才能使用工具,是非常好的选择。
但是榙建基于eclipse的STM32的开发环境,需要好几个软件与插件,且相应的版本需要能兼容,才能正确搭建好开发环境。
为了协助客户快速搭建eclipse编译环境,英创公司编写了这篇文章,详细说明了整个eclipse环境搭建、工程建立、目标代码烧写、以及使用JLink进行软件调试的方法。
所需要的软件或插件如下:●JAVA●eclipse C/C++●gcc-arm-none-eabi,交叉编译工具链●CDT,对cortex-M的支持的编译工具以及对J-Link调试工具的支持●J-LINK驱动开发/烧写STM32所需要的软件/工具:●STM32 Flashloader串口烧写工具为了方便客户更加简单、方便地搭建ETA321的开发环境,英创公司下载了所需的工具软件:JAVA、eclipse C/C++、gcc-arm-none-eabi、STM32-Flashloader等,可以直接利用。
arm开发环境搭建实验报告实验内容
ARM开发环境搭建实验报告一、实验目的本实验旨在帮助学生了解和掌握ARM开发环境的搭建过程,包括交叉编译环境的搭建、嵌入式系统开发环境的搭建、ARM Linux操作系统的搭建以及应用软件的开发与部署。
通过本次实验,学生将能够熟悉ARM开发的基本流程,为后续的ARM开发打下基础。
二、实验内容1. 开发环境介绍本部分将介绍ARM开发环境的基本概念、组成和搭建流程。
重点讲解ARM架构的特点、开发板的选择以及开发工具链的组成。
通过本部分的学习,学生将能够对ARM开发环境有基本的了解和认识。
2. 交叉编译环境搭建交叉编译是指在一种平台上生成另一种平台上的可执行文件。
本部分将介绍如何搭建ARM交叉编译环境,包括交叉编译工具链的安装、配置和使用。
同时,学生将通过实践操作,掌握交叉编译的基本方法。
3. 嵌入式系统开发环境搭建嵌入式系统是指专为特定应用而设计的计算机系统。
本部分将介绍如何搭建嵌入式系统开发环境,包括开发板的连接、调试工具的安装以及嵌入式操作系统的选择和烧写。
通过本部分的学习,学生将能够掌握嵌入式系统开发的基本流程。
4. ARM Linux 操作系统搭建ARM Linux操作系统是一种针对ARM架构的开源操作系统。
本部分将介绍如何搭建ARM Linux操作系统,包括操作系统的下载、烧写以及启动过程。
同时,学生将学习如何在ARM Linux上安装软件、配置网络等操作,以便进行后续的应用软件开发。
5. 应用软件开发与部署本部分将介绍如何进行ARM应用软件开发与部署。
首先,学生将学习如何使用交叉编译工具链编译应用程序;其次,学生将学习如何将应用程序部署到ARM设备上,并进行测试和调试。
通过本部分的学习,学生将能够掌握ARM应用软件开发的整个流程。
三、实验步骤1. 安装交叉编译工具链,并配置环境变量;2. 连接开发板,并安装调试工具;3. 下载并烧写嵌入式操作系统;4. 安装ARM Linux操作系统;5. 编写应用软件源代码;6. 使用交叉编译工具链编译应用软件;7. 将应用软件部署到ARM设备上;8. 进行测试和调试。
Windows CE嵌入式系统程序开发(基于ARM11)
2 搭建Windows CE 开发环境 2.3 定制DMA-6410 XP 系统
2.3.1 使用项目向导 2.3.2 构建新的平台 2.3.3 编辑和修改 Windows Embedded CE项目 2.3.4 添加必要的功能 2.3.5 Build
3 Windows CE应用程序开发
3.1 第一个 WinCE程序
位程序
D
7 GPS与Google Earth定位系统
7.1 GPS相关知识
7.1.1 卫星星座 7.1.2 地面监控系统 7.1.3 信号接收机
7 GPS与Google Earth 定位系统
7.2 搭建环境
7.2.1 解析GPS定位信息 7.2.2 下载并安装Google Earth
7 GPS与Google Earth定位 系统 7.4 GPS与Google Earth定位程序
7.4.1 Google Earth_Start程序 的建立 7.4.2 地图定位功能 7.4.3 在地图上新增地标
8 鲜奶配送系统
8.1 系统总体 设计
A
8.2 搭建开发 环境
B
8.3 系统数据 库设计
C
8.4 系统初始 化
D
8.5 终端应用 程序设计
E
8 鲜奶配送系统
8.5 终端应用程序设计
6.3 键盘接口及 驱动程序
6.6 GPRS接口 及驱动程序
6 接口驱动程序开发
6.7 直流电动机接口及驱 动程序
6.9 蓝牙接口及驱动程序
6.8 步进电动机接口及驱 动程序
6 接口驱动程 序开发
6.1 驱动架构分析
6.1.1 驱动程序分类
6.1.2 流接口驱动程序架 构
ARM嵌入式系统第8章ARMADS集成开发环境

创建工程
ADS中的CodeWarrior是集管理、编辑、编译、 链接于一体的集成开发环境。用户可以利用工 程管理的思想组织项目开发中的源文件、库文 件、头文件和其他相关的输入输出文件。
工程能够将所有的源码文件有机地组织在一起, 并决定最终生成文件存放的路径,输出的格式 等。
AXD调试环境_查看反汇编代码
•ARM嵌入式系统第8章ARMADS集 成开发环境
使用JTAG仿真器来调试程序
使用AXD可以完成对程序的软件仿真调 试,但要完成硬件仿真和调试功能,则 需要通过JTAG仿真器实现ARM处理器与 主机的通信联络。
•ARM嵌入式系统第8章ARMADS集 成开发环境
使用JTAG仿真器来调试程序
•ARM嵌入式系统第8章ARMADS集 成开发环境
初始化存储器
通常ARM处理器都集成有SDRAM控制器。程序的在线 调试实际上是要将程序代码通过JTAG仿真器下载到处 理器的SDRAM空间执行,但是SDRAM在初始化上电时 并不能直接访问,必须配置它的刷新计数值、刷新时 间、刷新使能等才可以访问。
初始化存储器就是设置ARM处理器的某些寄存器,实 现对SDRAM存储空间映射的初始化过程。
EELIOD系统硬件决定了在进行JTAG调试时,一上电 SDRAM并没有初始化,故不能直接访问,下载程序前 需要先进行SDRAM的初始化工作。
•ARM嵌入式系统第8章ARMADS集 成开发环境
初始化存储器
ARMulaor可以提供指令执行时内部寄存器状况 及执行周期,可以进行应用程序的性能分析, 这样就为软硬件并行开发提供了极大的方便。
•ARM嵌入式系统第8章ARMADS集 成开发环境
Qt-WinCE 在arm平台上搭建及程序自启动
Qt-WinCE 在armv4i平台上搭建及程序自启动全解编译步骤●Qt 嵌入式环境的搭建的准备1.首先,下载Qt的嵌入式开发包qt-embedded-wince-opensource-src-4.4.0.zip2.然后,下载VS2005和vs补丁VS80sp1-KB926604-X86-CHS.exe。
3.最后,下载一个嵌入式开发的SDK,如STANDARD_SDK.msi(可以根据自己平台的SDk,进行安装,如up_tech.pxa270.sdk.msi 2410mini_SDK.msi)4.还有一个是同步的软件 Microsoft ActiveSync4.5中文简体版,win7貌似需要6.0以上。
5.具体也可以看Qt 文档提供的Qt for Windows CE Requirements●编译安装1.首先安装VS2005,很简单,按照向导来,在自定义安装中务必选择“智能设备开发”。
2.关于Microsoft ActiveSync4.5的安装更是简单。
在此不再多说!3.然后,安装Windows Mobile或是其它版本的SDK,可以用自定义的SDK!简单,这里我们采用up_tech.pxa270.sdk.msi4.接下来的就是qt-embedded-wince的安装。
具体也而已看qt-embedded-wince软件解压后里面的安装文档INSTALL,这里面都集体了介绍安装的步骤,其实很简单的。
5.参照下面的步骤:解压,将解压后的文件夹放到一个不含空格的路径中,如我的:D:\Qt_WinCE即为此文件夹。
Pxa270开发板参照下面的步骤:解压,将解压后的文件夹放到一个不含空格的路径中,如我的:D:\Qt_WinCE,Qt_WinCE即为此文件夹。
在D:\Qt_WinCE\mkspecs ,下面,新建一个文件夹,名字改为wince50pxa270-armv4i-msvc2005将wince50standard-armv4i-msvc2005下面的文件复制到文件夹wince50pxa270-armv4i-msvc2005下,同时修改qmake.conf文件,将CE_SDK = STANDARDSDK_500CE_ARCH = ARMV4I改为CE_SDK = pxa270CE_ARCH = ARMV4I设置环境变量:右键“我的电脑”->“属性”->点“高级”标签->“环境变量”选项set PATH= D:\qt-everywhere-opensource-src-4.6.3\binset QMAKESPEC = win32-msvc2005set QTDIR= D:\qt-everywhere-opensource-src-4.6.3接下来就是开始执行configure 的命令,在“开始”->“程序”->Microsoft visual studio ->Microsoft visual stdio tools->Microsoft visual studio 命令行工作区,进去qt的解压目录D:\Qt_WinCE\。
VS2008+Windows Mobile 6开发环境配置

VS2008+Window Mobile开发环境的搭建Windows Mobile 6开发环境的配置过程需要的文件列表:1.Visual Studio 2008 (推荐用迅雷或者电骡下)。
2.Visual Studio 2008 的补丁SP1 (推荐用迅雷或者电骡下)3. ActiveSync版本4.5(/download/7/e/c/7ecbd388-7fb5-4e3e-b57f-12eaf7eb6136/setup.msi)4.Windows Mobile 6.0 Professional SDK(/download/f/2/3/f232f773-7edc-4300-be07-d3b76a5b3a91/Windows%20Mobile%206%20Professional%20SDK%20Refresh.msi)5. Windows Mobile 6 Professional 中文镜像(/download/0/1/2/012bfbba-9fe5-4e68-86c9-d434446d97dd/0804/Windows%20Mobile%206%20Professional%20Images %20(CHS).msi)开发环境安装顺序:首先安装Visual Studio 2008,然后安装Visual Studio 2008 SP1, 安装ActiveSync 版本4.5,安装Windows Mobile 6.0 Professional SDK ,安装Windows Mobile 6 Professional 中文镜像安装过程说明及其注意点:1. 默认状态下,安装Windows Mobile 6.0 Professional SDK会自动安装Windows Mobile 6.0的英文设备仿真器,而中文的设备仿真器(Windows Mobile 6 Professional 中文镜像)是需要我们单独下载的进行安装的。
STM32单片机开发Clion环境配置(windowslinux)

STM32单⽚机开发Clion环境配置(windowslinux)STM32单⽚机开发Clion环境配置最近开始接触STM32。
那个Keil编辑器实在不⾏,代码提⽰⼏乎没有。
偶尔在⽹上看到能⽤Clion开发STM32,并且三⼤平台都可以。
于是,折腾⼜开始了。
⼀、⼯具准备GNU Arm Embedded toolchainlinux:sudo apt install gdb-arm-none-eabisudo apt install gcc-arm-none-eabigcc编译⼯具(根据你的系统选择32位还是64位)windows下: mingwlinux下⼀般默认安装OpenOCDwindows下的地址linux下直接apt install即可STM32CubeMX直接去ST官⽹下载最新版即可。
下载完成直接就有三个系统下的版本。
linux:需要先安装Java环境:sudo apt install default-jre运⾏STM32CubeMX:可能需要加上运⾏权限:sudo chmod +x SetupSTM32CubeMX-6.1.1.linux./SetupSTM32CubeMX-6.1.1.linuxClion直接去官⽹下载,⽬前最新版2020.1学⽣和⽼师⽤教育⽹邮箱即可免费使⽤。
好像有期限:⼀年。
他的全家桶都可以⽤。
我反正⽤得很爽。
:这个东西也要备⼀个。
如果JLink烧写出现问题可能需要。
⽤这个⼯具你⼀定要知道你在⼲什么。
所以,我推荐⽤stlink.stLinkwindows下OpenOCD包中有这个驱动Linux下需要编译安装才⽐较保险。
⼆、安装注意事项1、基本按照上⾯的步骤安装。
尽量全部下载完毕再安装。
2、在Windows下能⽤管理员权限就⽤管理员权限。
3、OpenOCD只⽤解压即可。
但要注意在Windows系统变量⾥增加路径。
4、MinGW不要⽤线上安装⽅式,慢到你怀疑⼈⽣。
直接下载安装包即可。
ARM 环境搭建(自己总结)
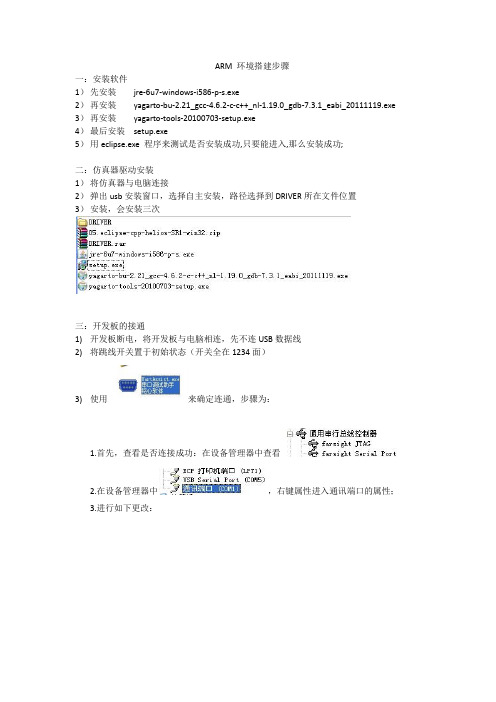
ARM 环境搭建步骤一:安装软件1)先安装jre-6u7-windows-i586-p-s.exe2)再安装yagarto-bu-2.21_gcc-4.6.2-c-c++_nl-1.19.0_gdb-7.3.1_eabi_20111119.exe 3)再安装yagarto-tools-20100703-setup.exe4)最后安装setup.exe5)用eclipse.exe 程序来测试是否安装成功,只要能进入,那么安装成功;二:仿真器驱动安装1)将仿真器与电脑连接2)弹出usb安装窗口,选择自主安装,路径选择到DRIVER所在文件位置3)安装,会安装三次三:开发板的接通1)开发板断电,将开发板与电脑相连,先不连USB数据线2)将跳线开关置于初始状态(开关全在1234面)3)使用来确定连通,步骤为:1.首先,查看是否连接成功:在设备管理器中查看2.在设备管理器中,右键属性进入通讯端口的属性;3.进行如下更改:4.进入,进行如下设置:5.点击打开,开发板上电,快速点击回车键,会看见未进行Uboot前的编号。
四:Uboot 步骤1)开发板断电,将初始状态最后的开关拨至英文边,连接USB数据线,上电,安装驱动;2)在windows 命令模式下输入arm-none-eabi-gcc-4.6.2 –v 查看安装成功状态。
3)进入4)开发板断电,设置,进入option,进行如下设置:5)开发板上电,进入,点击connect。
6)进入,点击transmat ->Transmat 选择Uboot的.bin 文件,顺序不能错,顺序为下图由下到上传送:1.先传送USB Installer_DDR2.bin2.再传送u-boot-dnw.bin 在倒计时结束之前快速点击回车, 输入:dnw 20008000回车3.最后传送u-boot.bin 输入nand erase 0 40000 回车;nand write 20008000 0 40000 回车。
Qt-Windows搭建Qt5.12开发环境

Qt-Windows搭建Qt5.12开发环境下载Qt安装包⽹址 http://download.qt.io/archive/qt/5.12/5.12.2/上⾯的⽹站,估计下载很慢,这⾥贴上⼀个清华源的。
https:///qt/official_releases/qt/5.12/5.12.2/安装Qt双击exe可执⾏⽂件即可讲解 Qt 安装包⾥⾯各个组件“Qt 5.12.0”节点下⾯是 Qt 的功能模块,包括⽤于不同编译器和平台的模块,这些模块包括内容如下:1、MinGW 5.3.0 32 bit 编译器模块。
MinGW 是 Minimalist GNU for Windows 的缩写,MinGW是 Windows 平台上使⽤的 GNU ⼯具集导⼊库的集合。
2、⽤于 UWP 编译的模块。
UWP 是 Windows 10 中 Universal Windows Platform 的简称,有不同编译器类型的 UWP。
3、⽤于 windows 平台上的 MSVC 编译器模块,如 msvc2015 32-bit 和 msvc2015 64-bit 等。
要安装 MSVC 编译器的模块,需要计算机上已经安装相应版本的 Visual Studio。
4、⽤于 Android 平台的模块,如 Android x86 和 Android ARMv7。
5、Sources 模块是 Qt 的源程序。
6、Qt Charts 是⼆维图表模块,⽤于绘制柱状图、饼图、曲线图等常⽤⼆维图表。
7、Qt Data Visualization 是三维数据图表模块,⽤于数据的三维显⽰,如散点的三维空间分布、三维曲⾯等。
8、Qt Purchasing、Qt WebEngine、Qt Network Auth(TP)等其他模块,括号⾥的 TP 表⽰技术预览(Technology Preview)。
9、Qt Scritp(Deprecated)是脚本模块,括号⾥的“Deprecated”表⽰这是已经过时的模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Windows下搭建ARM开源开发环境
1.安装java环境:
到sun网站下载最新的JRE,目前最新的是JRE 6 Update 12。
/javase/downloads/index.jsp
下载后安装。
2.下载E clipse IDE for C/C++ Developers :
下载地址:/downloads/
E c lipse IDE for C/C++ Developers (68 MB)该版本已经集成了C/C++开发插件(CDT 5.x),不需要单独
下载CDT。
下载后解压到合适的目录即可,例如:d:/ide/eclipse_for_ar m。
3.下载WinARM(95M):
WinARM是以在windows系统下开发ARM 嵌入式软件的GNU和其他工具集合。
下载后解压,然后设置PATH环境变量,例如:
在Path中添加:C:\WinARM\bin;C:\WinARM\utils\bin;
下载地址:WinARM 20060606 zip
http://gandalf.arubi.uni-kl.de/avr_projects/arm_projects/WinARM-20060606.
zip
或者自解压包(7z格式):WinARM-20060606.exe
http://gandalf.arubi.uni-kl.de/avr_projects/arm_projects/WinARM-20060606.
exe
详细内容:http://gandalf.arubi.uni-kl.de/avr_projects/arm_projects/#winarm 详细安装方法:
http://gandalf.arubi.uni-kl.de/avr_projects/arm_projects/WinARM_20060606_ readme.html
4.下载Yagarto包:http://www.yagarto.de/
需要下载一下包:
Zylin plugin安装方法:
A:启动Eclipse IDE for C/C++程序
到第2步中Eclipse IDE for C/C++安装目录,eclipse双击eclipse.exe 启动Eclipse IDE for C/C++:
启动开始闪屏画面如下图:
如果不能启动,可能是JRE没有安装,参考第一步。
之后,设置工作空间路径(例如:D:\Projekte\EclipseWorkspace):
点击OK按钮,随后即启动完成进入"Welcome"欢迎界面:
点击右侧"Workbench" 图标,即如下:
B:安装Zylin CDT plugin(Zylin插件):
选择Help菜单"Help / Software Updates...":
启动eclipse插件安装界面:
点击 "Add Site..." 按钮,进入安装站点界面:
在Location:栏中输入:/zylincdt/,点击OK按钮,如下图,然后展开/zylincdt/地址前面的+,如下所示:
等一会儿,出现上图内容时,点击"Install..."按钮,开始安装,这时也需要下载相关的插件,等待下载完成后,依次点击“Next >”,“I accept”,“Finish”,“yes”等按钮,最后自动重启Eclipse IDE for C/C++即可安装成功。
5.安装GnuARM-Eclipse Plugin(6K):
下载该插件:org.eclipse.cdt.gnuarm_0.5.0_beta.jar
地址:/projects/gnuarmeclipse/
拷贝到Eclipse IDE for C/C++安装目录下的plugins目录,然后重启Eclipse IDE for C/C++。
重启时使用命名:start eclipse.exe -clean
6.使用:
依次“File 》C Project“,创建一个新项目:
如下图,
输入项目名称(Project Name:),myARM ;
在Project Types:中展开Executable,选择Hello World ANSI C Project,右侧ToolChain选择WinARM,yagarto,点击Next按钮,进入下一步设置:
如下图,设置相关的内容
继续点击,Next ,如下图:
点击Finish,完成新建项目。