基于优化蚁群算法的机器人路径规划
基于改进蚁群算法的农业机器人多田块路径规划方法与试验

基于改进蚁群算法的农业机器人多田块路径规划方法与试验在科技的大海里,每一项创新都像是一颗璀璨的星辰,照亮人类前行的道路。
今天,我要讲述的,是一个关于智慧农业和机器人技术的故事——一个如何利用改进的蚁群算法,为农业机器人在多田块环境中规划出一条高效、节能的路径的故事。
想象一下,一片广阔的农田,就像是一张巨大的棋盘,而农业机器人则是那些忙碌的小兵,它们需要在这棋盘上走出一条最优的路线。
传统的路径规划方法,就像是让这些小兵们在黑暗中摸索,不仅效率低下,而且容易走入死胡同。
但是,如果我们借鉴自然界中蚂蚁的智慧,又将是怎样一番景象呢?蚂蚁,这个看似微不足道的生物,却拥有着令人惊叹的寻路能力。
它们通过释放信息素来标记路径,并通过感知这些信息素的浓度来选择前进的方向。
这种群体智慧的结晶,被科学家们提炼为“蚁群算法”,并成功地应用于许多领域。
而如今,我们将其引入到农业机器人的路径规划中,无疑是一次大胆而富有创新的尝试。
改进后的蚁群算法,就像是为农业机器人装上了一双明亮的眼睛和一颗聪明的大脑。
它们能够实时地感知环境的变化,快速地计算出最优的路径。
这就好比是在一张复杂的迷宫图中,找到了一条从入口到出口的最短路线。
这样的路径规划,不仅提高了作业的效率,还大大减少了能源的消耗。
然而,任何一项技术的创新都不是一蹴而就的。
在实际应用中,我们还需要考虑诸多因素,比如地形的起伏、作物的生长状况、天气的变化等等。
这些不确定因素就像是道路上突然出现的障碍物,需要我们的农业机器人能够灵活应对。
因此,我们在改进蚁群算法的基础上,加入了自适应和学习能力,使得农业机器人能够在复杂多变的环境中游刃有余。
当然,任何一项技术的推广和应用都需要经过严格的测试和验证。
我们进行了一系列田间试验,将搭载了改进蚁群算法的农业机器人放入真实的农田环境中。
结果显示,这些机器人在多田块环境中的表现远超预期,它们能够准确地识别不同的田块,规划出合理的作业路径,并且在执行任务时几乎不留下任何遗漏或重复的区域。
基于改进蚁群算法的移动机器人路径规划
式中,$为起始节点,g为目标点,切为起始点$到节 点/之间的距离,血为节点/到目标点g之间的距离。这一 改进增强了蚂蚁搜索的目的性,降低了算法陷入局部最优解 的概率。
3.2信息素浓度更新规则的改进 传统蚁群算法是在蚂蚁遍历所有路径后再对信息素浓度
进行更新,并且信息素挥发因子是常数,这样容易导致蚂蚁 在前期搜索时的盲目性较大,在后期搜索时的收敛速度较慢。
作者简介:张小龙(1998-),男,河南周口人,硕士研究生。 研究方向:移动机器人路径规划研究。
63
信!g与电脑 China Computer & Communication
2021年第8期
1环境建模
移动机器人环境建模方法主要有栅格法、自由空间法、 构型空间法等,其中以栅格法最为常用。栅格法环境建模的 基本原理是将移动机器人的工作环境划分成很多小网格,每 个网格的大小是由机器人的步长决定的。机器人工作环境分 为可行区域与非可行区域,因此网格也是由可行网格与障碍 网格组成。可行网格用白色网格表示,非可行网格用黑色网 格表示。图1是20*20的机器人环境建模网格,机器人需要 从起始点(0, 0)到达终点(19, 19),中间每一段路径都 有8个方向可供选择,同时机器人也要躲避网格中的黑色障 碍物,以顺利到达终点。
Abstract: Aiming at the problems of traditional ant colony algorithm such as low efficiency, slow convergence speed, and easy to fall into local optimal solution, the author proposes an improved ant colony algorithm. The algorithm introduces a distance heuristic factor into the heuristic function, which makes the ants have the orientation in the path search process, and makes the algorithm not easy to fall into the local optimal solution. The research results show that the proposed improved ant colony algorithm can find the optimal path efficiently and quickly, and the quality of the path is better than the path planned by the traditional ant colony algorithm.
基于改进蚁群算法移动机器人的路径规划

煤矿机械Coal Mine Machinery Vol.30No.12 Dec.2009第30卷第12期2009年12月0引言移动机器人的路径规划是按照某一性能指标搜索一条从起点到目标点的最优或次最优的无碰撞路径。
机器人路径规划的研究始于20世纪70年代,目前国内外对这一问题的研究仍然十分活跃。
20世纪90年代Dorigo M最早提出来蚁群优化算法—蚂蚁系统(AS)并将其应用于解决计算机算法学中经典的旅行商问题(TSP)。
从蚂蚁系统开始,对蚁群算法得到了不断的发展和完善,并在TSP以及许多实际优化问题求解中进一步得到了验证。
本文针对基本蚁群算法存在收敛速度慢,计算周期长,易死锁等问题,在算法上进行了改进,通过多次仿真试验证明,改进后的算法增加了新路径的生成途径和提高了路径生成速度,从而能够快速得到较优解。
1蚁群算法的基本原理(1)环境建模环境模型表示是解决环境建模问题的第1步。
环境建模的本质属于环境特征提取与知识表示方法的范畴,决定了系统如何存储、利用和获取知识。
创建地图的目的是供机器人进行路径规划,因此地图必须便于机器理解和计算,而且当探测到新环境信息时,应该能够方便地添加到地图中。
移动机器人导航领域常用的环境模型分类情况如图1所示,其中尤以几种平面模型更为常见。
其中栅格模型在机器人系统中得到广泛应用,是目前使用较为成功的一种方法。
图1环境模型分类情况栅格模型是一种应用非常成功的度量地图构建方法,最早由Elfes于1985年提出,其思想是把移动机器人所处的环境分成许多大小相等的栅格,通过每个栅格被障碍占据或没有占据的概率值来进行空间状态描述。
(2)栅格标识的2种方法①直角坐标法如图2所示,以栅格阵左上角作为直角坐标系坐标原点,x轴正方向为水平向右,y轴正方向为竖直向下,坐标系的单位长度为栅格区间的一个单位长度。
某一栅格可用直角坐标(x,y)来标识。
图2栅格坐标与序号的关系基于改进蚁群算法移动机器人的路径规划*刘军,刘广瑞(郑州大学机械工程学院,郑州450001)摘要:针对基本蚁群算法存在收敛速度慢,计算周期长,易死锁等问题,提出了蚂蚁回退、蚂蚁相遇、带交叉点的路径交叉的改进算法。
基于蚁群算法全自主机器人路径规划研究
( l , nI l , n;, n 分别 是对 平 面工作 i , …, j , …,, 和 , — 2 = 2 n
环 境 的二 维划 分 维数 ) 为平 面环 境 中位 置 点 i j 与 之
1 蚁群算法 的原理
蚁群算 法f : 自然界 中蚂 蚁的寻食 过程进 行 3 对
间 的距离 ; i) t - 位于 位置 点 i 的蚂 蚁数 目; bt N刻 (为 处
刘祚 时 ,罗 爱华 ,彭建 云
LU Zu — h 。 UO . u . I o s i L Ai a PENG in y n h Ja . u
( 江西理工大学 , 赣州 3 0 0 41 0 )
摘
要 :蚁群 算法是一种源于大自然中生物世界的仿生类算 法 ,它模 仿昆虫王国中蚂蚁搜索食物的行
显然 ,有等 式w 一 b ( 。因为 在 初始 时刻 , 条 。t ) 每 路 径 的信 息素 轨迹 的量 都是 相 等的 , 有 预设 条件 所
,.; c
() C,C是一 定 常量 。 0=
收稿 日期 :2 0 —60 0 90 —1 作者简介:刘祚时 (9 3一) 16 ,男, 教授 ,博士 ,研究方向: 勾人工智能 、车 辆工程 、软件 工程 。
2 蚁群 算法的全 自主机器人路径规划
21 蚁 群 算法 的描述 .
在 求 解 的过 程 中 , 为 了对 蚁群 的 行 为 进 行仿
真 ,引入 以下 描 述符 号 :w 为 蚁群 中蚂蚁 的个数 ;
d
.
研究 解决此 类问题 的蚁群算 法, 于扩 大蚁群 算法 的 对
应用 范 围具有 重要 意义 。
径 上 的信 息量却 会 随着 时 间的流 逝 而逐渐 消 减 ,最
基于蚁群算法的机器人全局路径规划的开题报告
基于蚁群算法的机器人全局路径规划的开题报告一、选题背景机器人在工业、农业、医疗等领域得到了广泛的应用。
机器人的路径规划是机器人移动的核心问题之一。
机器人路径规划技术主要分为局部路径规划和全局路径规划两种。
局部路径规划是指在已知的地图和机器人位置的情况下,通过运用不同的算法,生成机器人移动时的轨迹,保证机器人能够安全、高效地从当前位置移动向目标位置。
全局路径规划则是指在未知或部分未知环境下,机器人需要找到从起点到终点的全局最优路径。
蚁群算法是一种基于群体智能的优化算法,该算法的主要思想是通过模拟蚂蚁寻找食物的行为,使得种群中的个体在不断地移动和搜索中,最终找到全局最优解。
与其他基于群体智能算法相比,蚁群算法具有很强的全局搜索能力和优化能力。
因此,本文将研究基于蚁群算法的机器人全局路径规划方法,通过模拟蚂蚁寻找食物的行为,找到机器人从起点到终点的全局最优路径。
二、论文研究内容及意义2.1 研究内容本文主要研究在未知环境下基于蚁群算法的机器人全局路径规划,主要包括以下几个方面:1. 建立机器人运动的数学模型,确定机器人的运动方程和状态转移方程。
2. 基于蚁群算法,设计机器人的全局路径规划算法,通过模拟蚂蚁寻找食物的行为,找到机器人从起点到终点的全局最优路径。
3. 结合机器人的运动模型和路径规划算法,实现基于ROS的机器人路径规划系统,并对系统进行实验验证。
2.2 研究意义机器人路径规划技术与实际应用密切相关,对机器人的自主行动和任务执行具有重要意义。
本文基于蚁群算法研究机器人全局路径规划,将具有以下意义:1. 通过研究基于蚁群算法的机器人全局路径规划,使得机器人能够在未知环境中找到全局最优路径,提高了机器人的自主控制能力。
2. 设计基于ROS的机器人路径规划系统,有效地将理论研究应用到实际中去。
3. 本研究通过蚁群算法为机器人路径规划提供了一种新的思路和方法,具有一定的理论和实际参考价值。
三、研究方法本文主要采用以下几种研究方法:1. 理论分析法:分析机器人的运动模型和状态转移方程,推导蚁群算法应用于机器人路径规划的数学模型。
基于优化蚁群算法的机器人路径规划
( 1 . S h a n d o n g Y e l l o w R i v e r I n s t i t u t e o f Me t r o l o g y , J i n a n 2 5 0 0 0 0 C h i n a ; 2 . ME S N AC , Q i n g d a o 2 6 6 0 4 2 C h i n a )
Ab s t r a c t :I n o r d e r t o r e s o l v e t h e a n t c o l o n y a l g o r i t h m h a s s l o w c o n v e r g e n c e s p e e d a n d i s e a s y t o f a l l i n t o l o c a l o p t i mu m a n d s t a g n a t i o n , t h i s p a p e r p r e s e n t s a me t h o d f o r r o b o t p a t h p l a n ni n g b a s e d o n a n t c o l o n y o p t i mi z a t i o n a l g o r i t h m. T h i s me ho t d
b a s e d o n Ma x — Mi n A n t S y s t e m, e s t a b l i s h e s n a a d a p t i v e mo d e l or f p h e r o m o n e e v a p o r a t i o n c o e ic f i e n t a d j u s t e d a d a p t i v e l y
基于改进蚁群算法的移动机器人路径规划方法

基于改进蚁群算法的移动机器人路径规划方法移动机器人路径规划是指在给定环境中,通过合理的路径选择机制,使机器人能够从起始位置达到目标位置。
蚁群算法(Ant Colony Optimization,ACO)是一种仿生优化算法,通过模拟蚂蚁在寻找食物过程中的行为来解决组合优化问题。
本文将基于改进蚁群算法的移动机器人路径规划方法进行讨论。
首先,基本蚁群算法可以描述为:蚂蚁在过程中通过释放信息素来引导其他蚂蚁选择路径,蚂蚁选择路径的概率与路径上的信息素浓度有关。
因此,移动机器人路径规划可以将环境建模为一个图,图中的节点代表机器人可以经过的位置,边表示节点之间的连接关系,边上的信息素浓度表示该路径的选择概率。
然而,基本蚁群算法存在一些问题,如易陷入局部最优解、收敛速度慢等。
为了改进蚁群算法的性能,可以采取以下措施:1.引入启发式信息:在传统蚁群算法中,蚂蚁只通过信息素来选择路径,而没有考虑其他启发信息。
可以通过引入启发式信息,比如节点之间的距离、节点的拥挤程度等,来辅助蚂蚁选择路径。
启发式信息可以通过转化为边上的信息素浓度来体现,从而在路径选择过程中起到指导作用。
2.动态调整参数:传统蚁群算法中的参数,如信息素的挥发系数、信息素的增加量等,通常是固定的。
在移动机器人路径规划中,可以根据进程的需要,动态调整这些参数。
比如,可以根据过程中的信息素浓度变化情况来动态调整信息素的挥发系数,增强的全局性。
3.禁忌表策略:禁忌表策略是一种记忆性策略,通过记录已经过的路径信息,来避免蚂蚁陷入重复的情况。
在移动机器人路径规划中,可以采用禁忌表策略来记录已经探索过的路径,从而防止机器人陷入循环过程。
4.并行化计算:蚁群算法的过程涉及到大量的迭代计算,这些计算可以通过并行化来加速。
在移动机器人路径规划中,可以将蚁群算法的计算过程进行并行化处理,通过多个计算节点同时进行并交换信息,从而提高效率。
综上所述,基于改进蚁群算法的移动机器人路径规划方法可以引入启发式信息、动态调整参数、禁忌表策略和并行化计算来提高规划算法的性能。
基于改进蚁群算法的路径规划优化方法研究
基于改进蚁群算法的路径规划优化方法研究近年来,随着人工智能技术的不断发展,路径规划优化成为了一个备受关注的研究领域。
在实际生产与生活中,很多问题都需要最优的路径规划方法来解决。
而蚁群算法,作为一种优化搜索算法,已被广泛应用在路径规划领域中。
然而,传统的蚁群算法存在着某些缺陷,如易陷入局部最优等问题。
因此,基于改进蚁群算法的路径规划优化方法研究具有重要意义。
第一部分:蚁群算法原理及其应用蚁群算法是一种模拟蚁群觅食行为的人工智能算法。
蚂蚁寻找食物的过程类比为信息素分布和发现的过程。
在此过程中,蚂蚁在多次探测后,通过信息素的积累和挥发调整自身行为,最终找到最短路径。
蚁群算法的应用十分广泛,不仅可用于路径规划领域,还可以用于图像分割、物流调度、模式识别等领域。
而在路径规划领域中,蚁群算法可以有效地解决复杂的路径规划问题,特别是对于多目标优化问题,蚁群算法在贴近实际的应用中取得了良好的效果。
第二部分:蚁群算法的缺陷及其改进然而,传统的蚁群算法存在着一些缺陷,其中较为突出的是易陷入局部最优。
由于信息素的积累需要长时间的迭代更新,这个过程相当于一种漫无目的的搜索过程,容易被那些信息素较强的路径所吸引。
为了解决这个问题,研究人员提出了多种改进蚁群算法的方案。
例如,采用局部搜索策略或全局搜索策略、降低信息素挥发率等。
注重信息素挥发率的调节,可以使得信息素积累的路径更具有全局性。
这些改进方案都能够有效地提高算法的搜索能力,使得算法较少陷入局部最优,从而找寻出更优的路径。
第三部分:改进蚁群算法在路径规划中的应用基于改进蚁群算法的路径规划优化方法在实际应用中也得到了广泛的应用。
通过对多种路径规划算法进行对比实验,研究人员发现,相较于其他算法,改进的蚁群算法在搜索能力、路径质量等方面均表现出了优越的性能。
例如,在智能物流领域,改进蚁群算法被应用于物流路径优化。
该算法结合了蚁群算法的搜索能力和改进方案,有效地提高了物流路径的准确度和路程质量。
基于改进蚁群算法的智能机器人路径规划
从一开始就被该领域 的专家及学者所 看重 。 为了找 在智 能机 器人 的研 究领域 中, 机器人 的路径规划 指的是机 项核心内容 , 令智能机器人能够顺利无 阻的行进 , 碰到了 器人在它 的工作范 围内, 根据系统 内部的指令 来进行 最优化的 寻一种最优 路径 , 些问题需要解 决, 且做了诸多 准备工作 , 直 至找 到了这种 基 选择 , 包 括行 走路 径最 短或行 走 时间最少等 决策 都是 通过 路 借助 以往蚁群算 径规划指令 来引导 , 甚至在智能机器人 的行走过 程中遇 到障碍 于 改进 蚁群算法的智能机 器人 路径 规划方案 ,
择 问题的解决方案 。 从实践研 究中发觉 到, 针对蚁群 算法来搜
从而令智能机器人接 收到最佳路径行进的指令, 自从 2 0 世 纪5 0 年 代 中期, 世界 科研 领 域创 立了仿生学 以 索有效信息, 且非常可能陷入到局部最优 路径的困顿 之 来, 人们从 生物 进化 的机 理中受到极 大的启发 , 提 出了许 多用 这一过程较 为缓慢 , 中, 让智能机器人无所适 从, 并最 终选择一条欠佳的路径行进。 以解决复 杂优化 问题的新方 法, 蚁群算 法便是其 中的一种 。 现
实验研究 ・
基于改进 蚁群算法的智能机器人路径规划
朱长耀 曹 凤( 辽 宁 工业 大学, 辽宁 锦州 1 2 1 0 0 0 )
摘 要 : 从 以往 的研 究资料 中可以了解到 , 智能 机 器人 路 径 规 划是 机 器人 研 究领 域中的一项重要 分支 , 同时也是智 能机 器人 用 以执 行各 种
究其原 因在于, 狼群分配 原则会对信息 出有效 的路径 , 因为未知环境 下的智能机 器人只有极 少的经验 更具 科技感 与智 能化 , 从而让信息素遵循 一定的规律呈现 出信息集 与知识 , 尤其 是对于行 进 路径 的选 择 , 更是难 上 加难 , 需要科 素进行 适当更新,
(完整word版)基于蚁群算法的路径规划
MATLAB 实现基于蚁群算法的机器人路径规划1、问题描述移动机器人路径规划是机器人学的一个重要研究领域。
它要求机器人依据某个或某些优化原则(如最小能量消耗,最短行走路线,最短行走时间等),在其工作空间中找到一条从起始状态到目标状态的能避开障碍物的最优路径。
机器人路径规划问题可以建模为一个有约束的优化问题,都要完成路径规划、定位和避障等任务。
2 算法理论蚁群算法(Ant Colony Algorithm ,ACA ),最初是由意大利学者Dorigo M. 博士于1991 年首次提出,其本质是一个复杂的智能系统,且具有较强的鲁棒性,优良的分布式计算机制等优点。
该算法经过十多年的发展,已被广大的科学研究人员应用于各种问题的研究,如旅行商问题,二次规划问题,生产调度问题等。
但是算法本身性能的评价等算法理论研究方面进展较慢。
Dorigo 提出了精英蚁群模型(EAS ),在这一模型中信息素更新按照得到当前最优解的蚂蚁所构造的解来进行,但这样的策略往往使进化变得缓慢,并不能取得较好的效果。
次年Dorigo 博士给出改进模型(ACS ),文中改进了转移概率模型,并且应用了全局搜索与局部搜索策略,来得进行深度搜索。
Stützle 与Hoos 给出了最大-最小蚂蚁系统(MAX-MINAS ),所谓最大-最小即是为信息素设定上限与下限,设定上限避免搜索陷入局部最优,设定下限鼓励深度搜索。
蚂蚁作为一个生物个体其自身的能力是十分有限的,比如蚂蚁个体是没有视觉的,蚂蚁自身体积又是那么渺小,但是由这些能力有限的蚂蚁组成的蚁群却可以做出超越个体蚂蚁能力的超常行为。
蚂蚁没有视觉却可以寻觅食物,蚂蚁体积渺小而蚁群却可以搬运比它们个体大十倍甚至百倍的昆虫。
这些都说明蚂蚁群体内部的某种机制使得它们具有了群体智能,可以做到蚂蚁个体无法实现的事情。
经过生物学家的长时间观察发现,蚂蚁是通过分泌于空间中的信息素进行信息交流,进而实现群体行为的。
基于优化蚁群算法的机器人路径规划

定的性能指标搜 索一条从起 始点到 目标点近似最优的无碰路
l 概 述
智能移动机器人导航主要包括定位、避障和路径规划 等
任务 。路径 规划问题 是移 动机 器人工作最重要 的基本环节之
一
的路 径规 划中 。
2 问题描述及环境模型的建立
21 问题描 述 . 移动机器 人最基本的路径规划 问题是在完全 已知 的静态 障碍物之 间,为机 器人寻找一条从给定 的起始点到 目标点的
p t p miiga dp t mooh e s aho t zn a s i n h t n s.
[ ywod ]An ooyO t zt nAC ; Ke r s t ln p mia o ( O)GAAag rh pt l nn C i i lo tm; a pa ig i h n
径。根据环境信息 已知程度的不 同,路径规划可分为 2种类 型 :() 1环境信息已知的全 局路径规划 ;() 2环境信息未 知或部 分未 知,必须 用传感器进行实 时环境探测 以获取 障碍 物信息
的局部路径 规划 。路径规划算法 的计 算量取 决于 任务、环境 的复杂度 以及对规划路径 的质量要求 。 本文研究 的全局路径规划包括环境建模和路径搜 索策 略 2个方面 。环境建模 的主要方法有可视 图法 、 自由空间法和
ma igu eo i i i o .n ti e vr n n , t o o yOp mia o ( kn s fg d dvs n I s n i me t An ln t z t nACO) s s dt op t l nn . h O r v db e d ao r i h o C i i i u e d ahp a i g T eAC i i o e yt e f O n s mp hi G n t g rtm( A) GA ag r h i p e e td Smuain rs l h w a temeh d C f c v l r v es e d o ahs ac i g e e cAloi i h G , A lo i m r sn e . i l o ut s o t t to a e e t e i o et e f t e rh n , t s t e s h h n i y mp h p p
基于改进蚁群算法的机器人路径规划
基于改进蚁群算法的机器人路径规划牛治永;李炎;李晓岚【期刊名称】《自动化技术与应用》【年(卷),期】2011(030)007【摘要】本文主要结合蚁群算法对机器人路径规划进行了系统的研究.针对蚂蚁在搜索路径过程中落入障碍物陷阱而造成算法停滞的现象,提出了蚂蚁系统回退策略.为了检验改进型算法的性能,基于MATLAB软件设计了仿真程序.仿真结果表明:对基本蚁群算法的改进,提高了算法的有效性和鲁棒性,增强了蚁群算法在机器人路径规划中的适应能力.%The paper mainly combined ant colony algorithm to carry on the research of system to the robot path programming. Aiming at the phenomenon of ant declines in the process of searching path into stumbling block trap and resulting in the calculate way be held up, the paper proposes into ant system back strategy. To examine the capability of improvement strategies, it designs a simulation based on MATLAB. The result shows that the improvement strategies to ACA raises the validity and robustness of the algorithm. And it also strengthens the orientation ability of ACA robot path planning.【总页数】4页(P1-4)【作者】牛治永;李炎;李晓岚【作者单位】海军大连舰艇学院装备自动化系,辽宁大连116018;辽宁出入境检验检疫局,辽宁大连116001;辽宁出入境检验检疫局,辽宁大连116001【正文语种】中文【中图分类】TP182【相关文献】1.基于改进蚁群算法的移动机器人路径规划 [J], 李文振;李富康;蔡宗琰;杨嘉;杨新坤;赵宁宁2.基于改进蚁群算法的多农业机器人路径规划研究 [J], 罗智杰;黄子涛;许嘉志;潘仲宇;曹亮;刘双印3.基于改进蚁群算法的移动机器人路径规划方法 [J], 李燕;季建楠;沈葭栎;苏瑞4.基于改进蚁群算法的机器人路径规划研究 [J], 姜伟楠;杨理柱;李秀华;侯阿临5.割草机器人路径规划研究--基于改进蚁群算法和计算机视觉 [J], 孙伟;李文俊因版权原因,仅展示原文概要,查看原文内容请购买。
蚁群算法及其在移动机器人路径规划中的应用剖析

蚁群算法及其在移动机器人路径规划中的应用剖析蚁群算法(Ant Colony algorithm)是一种模拟蚂蚁行为的启发式优化算法,其主要应用于解决组合优化问题,特别是在路径规划问题中的应用较为突出。
蚁群算法的基本原理是基于蚂蚁在寻找食物时的行为规律,当一只蚂蚁找到食物后,会释放一种称为信息素的物质,同时返回巢穴。
其他蚂蚁会根据信息素的浓度来选择路径,浓度高的路径被选择的概率较大。
当蚂蚁返回巢穴时,会根据所选择路径上的信息素浓度来增加信息素的浓度,从而在路径上留下更多的信息素。
随着时间的推移,信息素浓度逐渐增加,最终蚂蚁群体会逐渐聚集在较优的路径上。
移动机器人路径规划是指根据机器人的起点和终点,找到一条最优的路径。
在移动机器人路径规划中,蚁群算法可以解决多目标、多约束的路径规划问题。
下面将从问题建模、蚁群算法实现、实际应用等方面对蚁群算法在移动机器人路径规划中的应用进行剖析。
首先,对问题进行建模。
在移动机器人路径规划中,路径可以表示为有向图,图的节点表示机器人可以到达的位置,边表示连接两个位置的路径。
节点之间的距离可以是直线距离、时间、能耗等。
起始节点表示机器人的起点,终止节点表示机器人的目标。
路径规划的目标是找到一条从起始节点到终止节点的最短路径,同时尽可能满足约束条件。
其次,实现蚁群算法。
蚁群算法包括初始化信息素、蚂蚁的移动、信息素更新等步骤。
初始化信息素是指在路径上的每条边上设置初始信息素的浓度。
蚂蚁的移动过程中,每只蚂蚁根据信息素浓度和启发式函数来选择下一步移动的节点。
启发式函数可以根据节点和目标节点的距离、路径上信息素的浓度等因素来计算。
当蚂蚁到达终点后,根据蚂蚁的路径长度来更新路径上的信息素浓度,即路径长度越短的蚂蚁路径上的信息素浓度越高。
同时,为了防止信息素过快蒸发,可以引入信息素的挥发系数。
蚂蚁算法一般通过多次迭代来寻找最优的路径。
最后,应用蚁群算法进行路径规划。
蚁群算法在移动机器人路径规划中可以实现多目标、多约束的优化。
基于改进蚁群算法的移动机器人路径规划研究

基于改进蚁群算法的移动机器人路径规划研究基于改进蚁群算法的移动机器人路径规划研究摘要:随着移动机器人的快速发展和广泛应用,路径规划成为了一个研究热点。
蚁群算法是一种仿生算法,由于其具有优秀的全局搜索能力而被广泛应用于路径规划问题中。
然而,传统的蚁群算法存在着收敛速度慢、易陷入局部最优等问题。
为了提高路径规划算法的性能,本文针对蚁群算法的不足之处进行了改进,结合局部信息和全局信息,提出了一种改进蚁群算法,并在移动机器人路径规划问题中进行了实验与分析。
关键词:移动机器人;路径规划;蚁群算法;全局搜索;局部信息1. 引言近年来,移动机器人的应用范围不断拓展,如自主导航、物流配送、环境监测等领域。
而移动机器人的路径规划是其中的关键问题之一。
路径规划算法要求机器人能够找到一条安全、高效的路径,以达到目标位置。
2. 蚁群算法简介蚁群算法是一种仿生算法,灵感来源于蚂蚁在觅食过程中的行为。
蚁群算法通过模拟蚂蚁的觅食行为,以信息素作为信息交流媒介,实现了全局搜索和局部搜索相结合的优化过程。
蚁群算法具有全局搜索能力强、鲁棒性好等优点,适用于解决复杂的路径规划问题。
3. 蚁群算法改进但是传统的蚁群算法在解决路径规划问题时存在一些不足之处,如收敛速度慢、易陷入局部最优等。
为了提升算法的性能,本文提出了一种改进的蚁群算法。
该算法在原有的蚁群算法基础上,引入了局部信息和全局信息,并优化了信息素更新策略。
具体步骤如下:首先,根据机器人的起始和目标位置,生成初始化的蚁群。
蚂蚁根据当前位置和信息素浓度决定下一步的移动方向。
其次,蚂蚁根据当前位置和目标位置之间的距离信息,在局部范围内引入启发式信息。
启发式信息可使蚂蚁更快地向目标位置靠近,有利于减少路径长度。
然后,蚂蚁根据局部信息和全局信息的综合评估,确定下一步移动的方向。
综合评估考虑了当前位置附近的信息素浓度和离目标位置的距离。
此举有助于克服传统蚁群算法易陷入局部最优的问题。
最后,蚂蚁根据选择的移动方向更新信息素,并通过信息素挥发策略控制信息素的衰减。
基于蚁群算法的移动机器人路径规划

汇报人:文小库 2023-12-21
目录
• 引言 • 基于蚁群算法的路径规划模型 • 移动机器人路径规划算法实现 • 实验结果与分析 • 结论与展望
01
引言
研究背景与意义
01
移动机器人路径规划问题
随着机器人技术的不断发展,移动机器人在许多领域得到广泛应用。路
径规划是移动机器人自主导航的核心问题,需要寻找从起点到目标点的
05
结论与展望
研究成果总结
蚁群算法的优化
通过实验验证,蚁群算法可以有 效优化移动机器人的路径规划问 题,在复杂的地图环境中寻找最
短路径。
算法鲁棒性
蚁群算法具有较好的鲁棒性,对于 不同复杂度的地图和任务需求,都 能提供较为满意的解决方案。
实时性
蚁群算法能够在短时间内给出路径 规划结果,满足移动机器人实时决 策的需求。
04
实验结果与分析
实验环境搭建与数据采集
实验环境
在实验室环境中,搭建了一个10m x 10m的地图,其中包含障碍物和目标 点。
数据采集
通过移动机器人搭载的传感器采集地 图数据、障碍物位置、距离等信息。
算法性能对比实验
01
02
03
对比算法
将蚁群算法与常见的路径 规划算法(如Dijkstra算 法、A*算法等)进行对比 。
实验过程
在相同的实验环境下,分 别使用不同的算法进行路 径规划,并记录规划时间 和路径长度等指标。
结果分析
通过对比实验结果,分析 蚁群算法在路径规划中的 性能表现。
不同场景下的路径规划结果展示
场景一
地图中存在多个障碍物,需要规划出一条从 起点到终点的最短路径。
基于改进蚁群算法的机器人路径规划
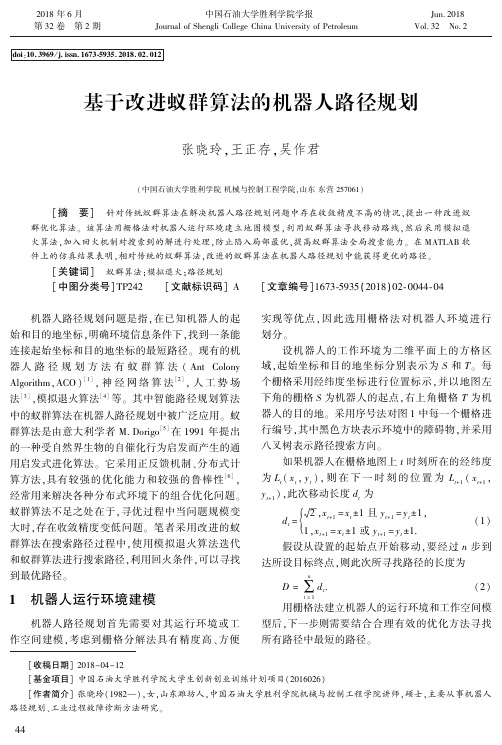
[收稿日期]2018-04-12[基金项目]中国石油大学胜利学院大学生创新创业训练计划项目(2016026)[作者简介]张晓玲(1982 ),女,山东潍坊人,中国石油大学胜利学院机械与控制工程学院讲师,硕士,主要从事机器人路径规划㊁工业过程故障诊断方法研究㊂doi :10.3969/j.issn.1673⁃5935.2018.02.012基于改进蚁群算法的机器人路径规划张晓玲,王正存,吴作君(中国石油大学胜利学院机械与控制工程学院,山东东营257061)[摘 要] 针对传统蚁群算法在解决机器人路径规划问题中存在收敛精度不高的情况,提出一种改进蚁群优化算法㊂该算法用栅格法对机器人运行环境建立地图模型,利用蚁群算法寻找移动路线,然后采用模拟退火算法,加入回火机制对搜索到的解进行处理,防止陷入局部最优,提高蚁群算法全局搜索能力㊂在MATLAB 软件上的仿真结果表明,相对传统的蚁群算法,改进的蚁群算法在机器人路径规划中能获得更优的路径㊂[关键词] 蚁群算法;模拟退火;路径规划[中图分类号]TP242 [文献标识码]A [文章编号]1673⁃5935(2018)02⁃0044⁃04 机器人路径规划问题是指,在已知机器人的起始和目的地坐标,明确环境信息条件下,找到一条能连接起始坐标和目的地坐标的最短路径㊂现有的机器人路径规划方法有蚁群算法(Ant Colony Algorithm,ACO )[1],神经网络算法[2],人工势场法[3],模拟退火算法[4]等㊂其中智能路径规划算法中的蚁群算法在机器人路径规划中被广泛应用㊂蚁群算法是由意大利学者M.Dorigo [5]在1991年提出的一种受自然界生物的自催化行为启发而产生的通用启发式进化算法㊂它采用正反馈机制㊁分布式计算方法,具有较强的优化能力和较强的鲁棒性[6],经常用来解决各种分布式环境下的组合优化问题㊂蚁群算法不足之处在于,寻优过程中当问题规模变大时,存在收敛精度变低问题㊂笔者采用改进的蚁群算法在搜索路径过程中,使用模拟退火算法迭代和蚁群算法进行搜索路径,利用回火条件,可以寻找到最优路径㊂1 机器人运行环境建模机器人路径规划首先需要对其运行环境或工作空间建模,考虑到栅格分解法具有精度高㊁方便实现等优点,因此选用栅格法对机器人环境进行划分㊂设机器人的工作环境为二维平面上的方格区域,起始坐标和目的地坐标分别表示为S 和T ㊂每个栅格采用经纬度坐标进行位置标示,并以地图左下角的栅格S 为机器人的起点,右上角栅格T 为机器人的目的地㊂采用序号法对图1中每一个栅格进行编号,其中黑色方块表示环境中的障碍物,并采用八叉树表示路径搜索方向㊂如果机器人在栅格地图上t 时刻所在的经纬度为L t (x t ,y t ),则在下一时刻的位置为L t +1(x t +1,y t +1),此次移动长度d t 为d t =2,x t +1=x t ±1且y t +1=y t ±1,1,x t +1=x t ±1或y t +1=y t ±1{.(1)假设从设置的起始点开始移动,要经过n 步到达所设目标终点,则此次所寻找路径的长度为D =∑nt =1d t .(2)用栅格法建立机器人的运行环境和工作空间模型后,下一步则需要结合合理有效的优化方法寻找所有路径中最短的路径㊂442018年6月中国石油大学胜利学院学报Jun.2018第32卷 第2期Journal of Shengli College China University of Petroleum Vol.32 No.2图1 栅格地图模型2 基于传统蚁群算法的路径规划2.1 蚁群觅食分析研究发现,每只蚂蚁觅食过程中在其行走路径上会留下一种为信息素的化学物质,一定范围内的其他蚂蚁能感觉到这种物质,且倾向于朝信息素浓度高的方向移动[7]㊂如果在某一条所走过的路径上被留下的信息素总量的浓度越高,则其他蚂蚁倾向选择这条路径的概率就会越大,因此有了信息素这种媒介物质,最终使得绝大多数蚂蚁选择最短的路径行走㊂2.2 基于传统蚁群算法的机器人路径规划步骤 步骤1:将算法中各类参数初始化,如蚁群中蚂蚁数量㊁最大迭代次数等;步骤2:在栅格地图初始化时,将机器人看做一只蚂蚁,蚂蚁运动时受到各路径上信息素浓度影响,根据每条路径上的信息浓度决定下一步方向㊂蚂蚁在t 时刻当前位置为i ,往位置j 移动的概率P ij (t )为P ij (t )=[τij (t )]α[ηij ]β∑k ∈allowed[τik (t )]α[ηik ]β,j ∈allowed ;0,其他ìîíïïïï.(3)式中,α,β为控制信息素和启发信息影响大小的参数;allowed 是可选的前进方向集合㊂步骤3:计算每个蚂蚁所产生的路径长度㊂步骤4:更新信息素浓度㊂τij (t +1)=ρτij (t )+Δτij (t ,t +1).(4)Δτij (t ,t +1)=∑mk =1Δτk ij (t ,t +1).(5)式中,τij (t +1)为在第t 次迭代时边ij 上的蚂蚁释放的信息素;ρ为信息素维持因子;Δτij (t ,t +1)为每个蚂蚁在某个边ij 上留下所产生信息素之和㊂步骤5:使所有蚂蚁执行步骤2,得到n 条路径,找出所有路径中最短的可行路径,并按式(4)更新信息素矩阵㊂步骤6:将当前迭代值与设定的最高迭代值进行比较,若超过限定值则终止循环迭代,否则回到步骤2,进入下一次迭代过程,直到满足该条件退出㊂3 基于改进蚁群算法的路径规划3.1 模拟退火算法模拟退火算法是对金属退火过程的模拟,先用高温将金属融化,然后逐渐冷却,直到形成良好的晶体结构,即进入一种具有最小能量的状态[8]㊂模拟退火算法也可用于路径规划算法以避免陷入局部最优㊂模拟退火算法迭代过程如下㊂第一步:某个温度T 下得到一个解(结合蚁群算法时,指用蚁群算法优化得到的解)㊂第二步:若当前温度T 下得到的解比前一时刻温度的解好,则采用这个新的解,否则转第三步㊂第三步:计算温度T 下接受劣解的概率㊂P =e dEkT .(6)其中,随机产生一个[0,1]区间的随机数X ,如果X <P ,那么接受这个劣解,转到第一步,否则放弃这个解,转到第一步㊂从P 的计算公式可以看到,随着温度T 的上升,P 的值是越来越小的,随着迭代的进行,接受劣解的概率下降,与自然界中晶体退火结晶的过程非常相似,从而实现了模拟退火算法㊂3.2 带回火的模拟退火-蚁群算法路径规划步骤 采用模拟退火-蚁群算法进行路径寻优时,加入回火,回火机制是指当温度低于设定回火下限温度时,温度慢慢升温到回火上限温度㊂回火本质上是在一段温度范围内反复循环降温过程,使得当前解不断得到优化,可以得到更好的解,消除快速降温时产生的局部最优[8]㊂因此带回火的模拟退火-蚁群算法的迭代步骤如下㊂步骤1:初始化算法中各类参数,如蚁群中蚂蚁的数量antnumber ,迭代次数maxgen ,冷却系数q ,初始温度T 0,回火温度下限T min ,回火温度上限T max ,54张晓玲,等:基于改进蚁群算法的机器人路径规划回火次数H max等㊂步骤2:设置蚁群算法的启发值和信息素浓度的初始大小进行模拟退火-蚁群算法的寻优㊂步骤3:进行蚂蚁搜索,设置起点并根据式(3)计算蚂蚁向各个方向移动的概率P ij,并根据概率公式移动到新位置后再进一步计算下一步移动的概率并移动,重复这个过程直到搜索到所设定的目的地或者找不到目的地直接退出㊂步骤4:计算目标函数,判断新路线是否优于原有路线,如果优于则接受新路线,转到步骤5;否则根据模拟退火机制按照式(6)计算接受较劣新线路(劣解)的概率,若概率满足条件则接受劣解,否则放弃㊂步骤5:根据式(4)㊁(5)进行信息素浓度更新,并更新温度(模拟退火冷却过程,温度逐渐降低),判断是否满足回火条件(回火次数未达到或者温度低于最小回火温度),满足则进行回火,回火次数自增1㊂步骤6:判断模拟退火算法迭代过程是否已经完成,若未完成则继续下一步迭代运算,相反,若完成则结束迭代循环㊂步骤7:输出结果,算法运行结束㊂4 仿真研究首先随机生成一个15×15的栅格地图仿真机器人路径搜索的运行环境,然后基于同一地图,分别运用传统蚁群算法和带回火的模拟退火-蚁群算法进行机器人路径规划的仿真研究,得到结果如图2 ~5所示㊂比较图2和图4的目标函数值(最优路径长度)可以看出,传统蚁群算法稳定在175左右,改进的带回火模拟退火-蚁群算法稳定在163左右㊂图3和图5的路径搜索线路也表明,相对传统的标准蚁群算法,本文提出改进后的优化方法查找到的移动路径明显更短㊂但通过观察图2和图4两种算法下的迭代次数,发现改进蚁群算法在迭代次数(63次)上稍逊于传统蚁群算法(57次)㊂为更合理地对比传统蚁群和改进蚁群算法,在不同大小的栅格地图上对两种算法进行多次仿真试验,结果如表1所示,分别记录了各自的迭代次数㊁最短路径值和平均运行时间㊂图2 传统蚁群算法优化过程图3 传统蚁群算法最优路径图4 改进蚁群算法优化过程64第32卷 中国石油大学胜利学院学报 2018年 第2期图5 改进蚁群算法最优路径表1 传统蚁群与改进蚁群算法在不同栅格地图环境下的对比栅格地图大小迭代次数传统算法改进算法最优路径长度传统算法改进算法运行时间/s传统算法改进算法11×114574165.8155.25.96.315×155763174.9163.214.914.420×205379191.2188.233.731.025×254759199.6182.682.880.630×307479200.0208.4195.0193.335×359196248.1208.7274.9257.040×407474222.7199.1452.1438.0对表1分析可得,改进算法在迭代次数上虽不占优势,略高于传统算法,但两种算法基于同一大小的栅格环境下实际运行时间相差无几,反而在栅格不断增多的情况下,改进算法的收敛速度要快于传统蚁群算法㊂从最优路径方面比较,除了在30×30大小的栅格地图上改进算法得到的最优路径相对传统算法稍长,其他结果均明显优于传统蚁群算法㊂因此,综合看来,在机器人寻找最优路径上,改进蚁群算法有一定的优越性㊂5 结束语针对基本的蚁群算法在解决移动机器人路径规划寻找最优搜索路径时存在收敛精度不够的问题,引入带回火的模拟退火原理处理蚁群算法得到的路径值,从而提出一种改进算法㊂最终的改进蚁群算法相比传统蚁群算法,具有更强的寻优能力,能够找到更好的机器人移动路径㊂[参考文献][1] LIM K K,YEW S O,LIM M H,et al.Hybrid ant colonyalgorithms for path planning in sparse graphs[J].SoftComputing,2008,12(10):981⁃994.[2] 魏冠伟,付梦印.基于神经网络的机器人路径规划算法[J].计算机仿真,2010,27(7):112⁃116.[3] 郑来芳,孙炜,欧阳明华,李飞.结合光流和人工势场的风管机器人避障方法[J].计算机工程与应用,2016,52(9):243⁃247 [4] 巩敦卫,曾现峰,张勇.基于改进模拟退火算法的机器人全局路径规划[J].系统仿真学报,2013,25(03):480⁃483. [5] COLORNI A,DORIGO M,MANIEZZO V,et al.Distributed op⁃timization by ant colonies[C]//Proceedings of European Conference onArtificial Life.Paris:Elsevier Publishing1991: 134⁃142.[6] 屈鸿,黄利伟,柯星.动态环境下基于改进蚁群算法的机器人路径规划研究[J].电子科技大学学报,2015,2:260⁃265 [7] BI X J,LUO G X.The improvement of ant colonyalgorithm basedon the inver⁃over operator[C]//IEEE International Conference onMechatronics and Automation.Harbin:IEEE Press,2007: 2383⁃2387.[8] 徐鹏.基于模拟退火算法的机器人路径规划与研究[J].科技广场,2011,1:42⁃44.[责任编辑] 董大伟74张晓玲,等:基于改进蚁群算法的机器人路径规划。
基于改进蚁群算法的多服务机器人路径规划
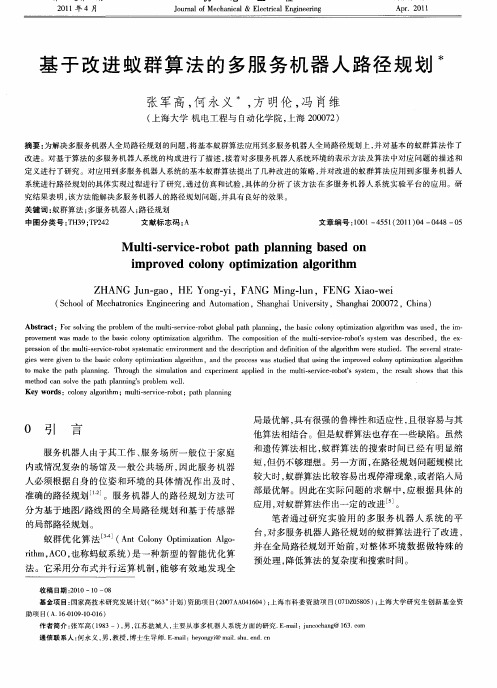
系统进行路径规划 的具体实现过程进行 了研究 , 通过仿 真和试验 , 具体 的分析 了该方 法在多 服务机器 人系统实 验平 台的应 用 。研
究结果表 明 , 该方法能解决多服务机器人的路径规划问题 , 并具有 良好 的效果。 关键 词 : 蚁群算法 ; 多服务机器人 ; 路径规划
中 图 分 类 号 :H 9 T 22 T 3 ;P 4 文献 标 志码 : A 文章 编 号 : 0 — 5 1 2 1 )4— 4 8— 5 1 1 4 5 (0 1 0 0 4 0 0
J un lo c a ia o ra fMe h ncl& E e tc lE gn e n lcr a n ie r g i i
A r 0 p .2 1 1
基 于 改进 蚁 群算 法 的 多服 务 机器 人 路 径规 划 术
张军 高 , 永 义 , 明伦 , 肖维 何 方 冯
M u t・e v c - o tp t l nn n s d o lis r ie- bo a h p a i g ba e n - r
i p o e o o y o tm ia i n a g r t m m r v d c l n p i z t l o ih o
( 上海 大学 机 电工程 与 自动化学 院 , 上海 2 0 7 ) 0 0 2
摘要 : 为解决多服务机器人全局路径 规划的问题 , 将基本蚁群算法应用到多服务机器人全 局路径规划 上 , 并对基 本的蚁群算 法作 了 改进 。对基 于算法 的多服务机器人系统 的构成进行 了描述 , 接着对 多服务机器人系统环境 的表示方法及算法 中对应问题 的描述和 定义进行 了研究 。对应用到多服务机器人系统 的基本蚁群算法提 出了几种改进的策略 , 并对改进 的蚁群算 法应 用到多服务 机器人
基于改进蚁群算法的移动机器人路径规划
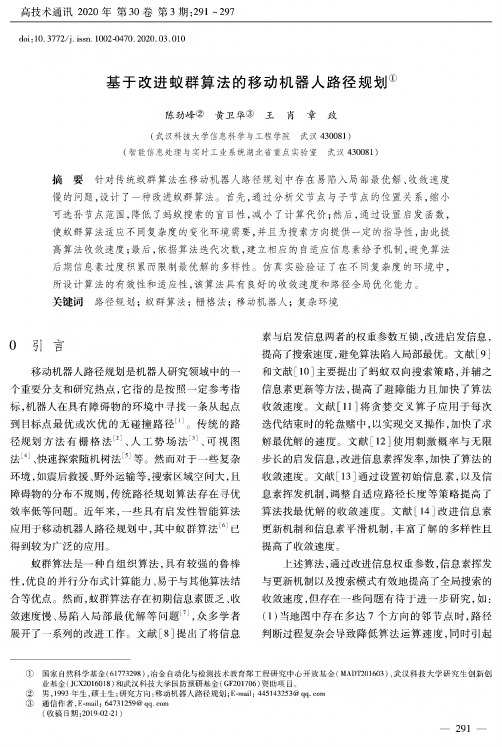
doi: 10. 3772/j. issn. 1002-0470. 2020.03.010
基于改进蚁群算法的移动机器人路径规划①
陈劲峰②黄卫华③王肖章政
(武汉科技大学信息科学与工程学院武汉430081) (智能信息处理与实时工业系统湖北省重点实验室武汉430081)
鉴于此,本文设计了一种改进的蚁群算法,并用 于解决复杂环境下的移动机器人路径规划问题 。首 先,通过精简可选孙节点策略,缩小传统蚁群算搜索 节点的范围,同时实现减小算法复杂度;其次,将环 境规模尺寸与目标点引入到启发函数,使得蚂蚁搜 索具有明确的方向性,并且适应不同环境规模;然 后,设置每代信息素总量按高斯函数下降趋势自适 应给予机制。最后,建立了移动机器人路径规划的 复杂环境模型,将本文设计的改进蚁群算法应用于 路径规划中,仿真结果证明了本文算法的有效性。
1问题描述及环境建模
本文中机器人工作环境为复杂的静态2维空 间,在全局路径规划中,设工作环境为nxn的栅格 环境,黑色栅格用1表示障碍物,白色栅格用0表示 自由可行区,不满一个栅格的障碍物仍按照一个栅 格处理。栅格序号按自上向下、从左到右的顺序编 为1,2,3,-,No以栅格图左下角为坐标原点,横轴 以从左至右为%轴正方向,纵轴以自下向上为y轴 正方向,每个栅格长度取为单位长度,每一个栅格记
0引言
移动机器人路径规划是机器人研究领域中的一 个重要分支和研究热点,它指的是按照一定参考指 标,机器人在具有障碍物的环境中寻找一条从起点 到目标点最优或次优的无碰撞路径⑴。传统的路 径规划方法有栅格法0、人工势场法⑶、可视图 法⑷、快速探索随机树法⑸等。然而对于一些复杂 环境,如震后救援、野外运输等,搜索区域空间大,且 障碍物的分布不规则,传统路径规划算法存在寻优 效率低等问题。近年来,一些具有启发性智能算法 应用于移动机器人路径规划中,其中蚁群算法⑷已 得到较为广泛的应用。
基于改进蚁群算法的机器人三维空间路径规划

original ant colon: algorithm.
Key words: industrial robot; collision free path planning; three-dimensional space; ant colon: algorithm;
artificial potential field
算 法 更 加 适 用 于 复 杂 环 境 ,解 的 质 量 和 搜 索 效 率 也 获 得 了 提 高 。在 UATLAB环 境 下 的 仿 真 结 果 表 明
了 文 中 方 法 与 原 始 蚁 群 算 法 相 比 ,能 够 更 快 地 搜 索 到 更 优 良 的 解 。
关 键 词 :工 业 机 器 人 ;无 碰 撞 路 径 规 划 ;三 维 空 间 ;蚁 群 算 法 ;人 工 势 场
中 图 分 类 号 :H U %%
文 献 标 识 码 :A
Path Planning and Simulation of Robot in Three-Dimensional
Space Based an Improved Ant Colony Algorithm
ZHANG Wen-qiang %ZHANG Yan
( School of Mechanical Engineering %Hefei University of Technology, Hefei 230009 %China)
பைடு நூலகம்
Abstract:For tlie
industrial
robot manipulator to complete
a
collision free patli
表面反复震荡而影响收敛速度等缺点。 本文提出了一种结合人工势场思想的改进蚁群算
基于改进蚁群算法的移动机器人路径规划方法
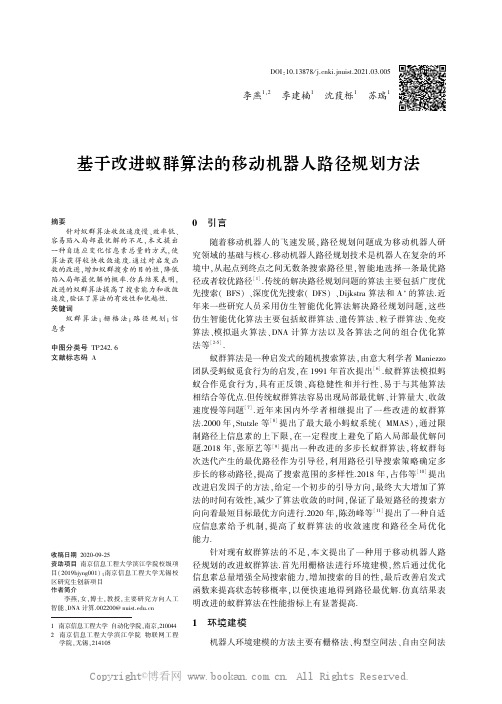
DOI:10.13878/j.cnki.jnuist.2021.03.005李燕1,2㊀季建楠1㊀沈葭栎1㊀苏瑞1基于改进蚁群算法的移动机器人路径规划方法摘要针对蚁群算法收敛速度慢㊁效率低㊁容易陷入局部最优解的不足,本文提出一种自适应变化信息素总量的方式,使算法获得较快收敛速度.通过对启发函数的改进,增加蚁群搜索的目的性,降低陷入局部最优解的概率.仿真结果表明,改进的蚁群算法提高了搜索能力和收敛速度,验证了算法的有效性和优越性.关键词蚁群算法;栅格法;路径规划;信息素中图分类号TP242 6文献标志码A收稿日期2020⁃09⁃25资助项目南京信息工程大学滨江学院校级项目(2019bjyng001);南京信息工程大学无锡校区研究生创新项目作者简介李燕,女,博士,教授,主要研究方向人工智能㊁DNA计算.002200@nuist.edu.cn1南京信息工程大学自动化学院,南京,2100442南京信息工程大学滨江学院物联网工程学院,无锡,2141050㊀引言㊀㊀随着移动机器人的飞速发展,路径规划问题成为移动机器人研究领域的基础与核心.移动机器人路径规划技术是机器人在复杂的环境中,从起点到终点之间无数条搜索路径里,智能地选择一条最优路径或者较优路径[1].传统的解决路径规划问题的算法主要包括广度优先搜索(BFS)㊁深度优先搜索(DFS)㊁Dijkstra算法和A∗的算法.近年来一些研究人员采用仿生智能优化算法解决路径规划问题,这些仿生智能优化算法主要包括蚁群算法㊁遗传算法㊁粒子群算法㊁免疫算法㊁模拟退火算法㊁DNA计算方法以及各算法之间的组合优化算法等[2⁃5].蚁群算法是一种启发式的随机搜索算法,由意大利学者Maniezzo团队受蚂蚁觅食行为的启发,在1991年首次提出[6].蚁群算法模拟蚂蚁合作觅食行为,具有正反馈㊁高稳健性和并行性㊁易于与其他算法相结合等优点.但传统蚁群算法容易出现局部最优解㊁计算量大㊁收敛速度慢等问题[7].近年来国内外学者相继提出了一些改进的蚁群算法.2000年,Stutzle等[8]提出了最大最小蚂蚁系统(MMAS),通过限制路径上信息素的上下限,在一定程度上避免了陷入局部最优解问题.2018年,张原艺等[9]提出一种改进的多步长蚁群算法,将蚁群每次迭代产生的最优路径作为引导径,利用路径引导搜索策略确定多步长的移动路径,提高了搜索范围的多样性.2018年,占伟等[10]提出改进启发因子的方法,给定一个初步的引导方向,最终大大增加了算法的时间有效性,减少了算法收敛的时间,保证了最短路径的搜索方向向着最短目标最优方向进行.2020年,陈劲峰等[11]提出了一种自适应信息素给予机制,提高了蚁群算法的收敛速度和路径全局优化能力.针对现有蚁群算法的不足,本文提出了一种用于移动机器人路径规划的改进蚁群算法.首先用栅格法进行环境建模,然后通过优化信息素总量增强全局搜索能力,增加搜索的目的性,最后改善启发式函数来提高状态转移概率,以便快速地得到路径最优解.仿真结果表明改进的蚁群算法在性能指标上有显著提高.1㊀环境建模机器人环境建模的方法主要有栅格法㊁构型空间法㊁自由空间法㊀㊀㊀㊀等几种.其中栅格法在机器人的环境建模上应用最多[12].栅格法主要任务是根据环境构建路径网格图,基本原理是将机器人的工作环境划分为许多微小的网格单元,每个网格的规格由机器人的步骤决定.网格由自由网格和障碍网格组成.白色的网格表示自由网格,黑色的网格表示障碍网格.图1是20ˑ20的网格节点图,每行的节点数Nx=20和每列的节点数Ny=20.坐标原点定在栅格空间的左下方,定义x轴正方向为从左到右,y轴正方向为从下到上.第1个点的坐标为(0,19),第2个点的坐标为(1,19),以此类推.假设S=1,2,3, ,N{}是一组节点的数量,第i个节点的坐标为(xi,yi),从起始点坐标(0,0)开始到终点坐标(19,19)结束.机器人只能在白色的自由网格中移动,需要避开黑色的障碍网格.根据网格的位置,网格可以分为中间网格和边界网格.对于中间网格,机器人的下一个动作可选择8个方向.当机器人运动到边界网格时,它的运动方向需舍去无法到达的方向.图1㊀20ˑ20的节点图Fig 1㊀20ˑ20nodegraph2㊀传统蚁群算法蚁群算法是一种群体智能仿生启发式算法,它通过模拟蚂蚁觅食的行为来找到食物源与其蚁巢之间的最佳路径.蚂蚁在通过的路径上会释放信息素.通过这些信息素,蚂蚁可以彼此交流并最终找到一条起点到终点的最短路径.在搜索过程中蚂蚁会随机选择前进的运动方向,信息素在路径上遗留的越多,对信息素浓度大的路径选择的概率就越大,在寻找路径的过程中蚁群个体之间的协作形成了一种正反馈机制.在寻找路径的过程中蚂蚁依据路径上的信息量和启发式信息计算转移概率:pkij(t)=τij(t)[]α㊃ηij(t)[]βðτis(t)[]α㊃ηis(t)[]β,㊀kɪAallowed,0,k∉Aallowed,ìîíïïïï(1)式(1)中:pkij(t)表示t时刻蚂蚁k从栅格i转移到栅格j的转移概率;τij表示栅格i到栅格j之间的信息素浓度;ηij表示栅格i,j之间的启发函数;α表示信息启发式因子;β表示期望启发因子;Aallowed表示禁忌表外可以走的节点.当蚂蚁在遍历了所有节点之后,需要对遗留的信息素进行更新处理,选用Ant⁃Cycle模型来更新信息素[13],由此t+Δt时刻在路径(i,j)上的信息素为τij(t+Δt)=(1-ρ)㊃τij(t)+Δτij(t),(2)Δτij(t)=ðmk=1Δτkij(t),(3)Δτkij(t)=QLk,㊀蚂蚁k经过(i,j),0,蚂蚁k未经过(i,j),ìîíïïïï(4)ηij(t)=1dij,(5)其中:ρ为挥发系数,ρɪ(0,1);Δτij(t)为本次循环后路径(i,j)上的信息素增量;Δτkij(t)表示第k只蚂蚁在本次循环中留在路径(i,j)上的信息量;Lk为第k只蚂蚁在本次循环中所走路径的总长度;Q是蚂蚁完成一次完整路径搜索后释放的信息素总量;dij表示节点i和j之间的欧式距离.3㊀改进的蚁群算法路径规划3 1㊀优化信息素总量对于传统的蚁群算法,完成一次完整路径搜索后所释放的信息素总量是一个定值.随着迭代次数的增加,后期路径上的信息素浓度易积累过高,导致蚂蚁一定程度上失去搜索优质解能力,信息素浓度在挥发因子的作用下降低,极可能增加陷入局部最优解的概率.本文提出了对信息素总量Q进行自适应调整的机制,随着迭代次数的增加Q逐步降低,大大降低陷入局部最优解的概率.方法如下:Q=2,㊀㊀㊀㊀㊀㊀㊀㊀Niter<50,0 004ˑQˑNc,iter,Niterȡ50,{(6)其中Niter表示迭代次数,Nc,iter是当前的迭代数.992学报(自然科学版),2021,13(3):298⁃303JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdition),2021,13(3):298⁃3033 2㊀启发函数的改进传统蚁群算法初始阶段在路径上没有遗留信息素,蚂蚁无法根据信息素浓度选择方向,搜索没有目的性,不能快速搜索到可行路径.针对这一问题,本文对迭代搜索的启发函数进行改进,采用当前节点到下一节点的距离与下一节点到目标节点距离之和的平方来优化启发函数,使得蚂蚁在搜索初期能够获得一个引导方向,增加目标节点对下一节点的影响,改进的启发函数如下:djD=(xj-xD)2+(yj-yD)2,(7)ηij=1(dij+djD)2,(8)其中djD表示节点j到目标点D的欧式距离.将传统的dij改为(dij+djD)2,增强了搜索的目的性,降低了陷入局部最优解的概率.3 3㊀蚁群算法相关参数蚁群算法中,参数的选取影响收敛速度和寻优结果,主要涉及的参数有蚂蚁数量㊁信息素挥发系数㊁启发因子α与期望启发因子β㊁迭代次数.具体分析如下:1)蚂蚁数量.算法中蚁群数量是一个关键的参数,蚁群数量过大,搜索路径上的信息素会趋于相等,无法确定最优路径;蚁群数量过小,有可能出现早熟,不能获取全局最优路径.本文蚂蚁数量M设置为50.2)信息素挥发系数.信息素反映蚂蚁搜索进程中积攒的信息量,指导蚁群搜索路径的方向.随着蚁群算法迭代的进行,节点上的信息素将逐渐挥发.信息素挥发系数ρ对蚁群算法的收敛速度和寻优能力都有着至关重要的影响.ρ增大信息素挥发加快,蚁群算法的随机性和搜索能力降低;ρ减小,全局搜索能力提高,但收敛速度也相应减慢.本文信息素挥发系数ρ设置为0.2.3)启发因子α与期望启发因子β.启发因子α表示路径上的信息素浓度对整个蚁群的指导作用;期望启发因子β表示路径相关信息对蚁群的影响.α的大小决定蚂蚁选择之前路径的概率大小,β的大小决定了算法的搜索效率.本文启发因子α设置为0.9㊁期望启发因子β设置为4.4)最大迭代次数.迭代次数主要根据执行的收敛轨迹来调整,迭代次数过小,会导致算法未收敛就已结束,过大会造成资源浪费.本文迭代次数设置为200.3 4㊀路径规划步骤为了实现改进的路径规划算法,本文对算法整体流程进行了设计.路径规划流程如图2所示,具体步骤如下:1)利用栅格法进行环境建模;2)对最大的迭代数㊁蚂蚁个数,以及其他参数如α,β,ρ等进行初始化;3)将所有蚂蚁放在起点处,计算启发信息;4)根据状态转移概率方程确定要选择的路径;5)蚁群遍历所有节点后根据信息素策略更新信息素;6)保存每个循环中每只蚂蚁的路径和路径长度;7)循环执行4)至6)直到获得最优解或者达到最大迭代数.图2㊀路径规划流程Fig 2㊀Pathplanning4㊀实验结果与分析为了检测改进的蚁群算法在机器人寻找最优路径中的效率,本文实验通过pycharm在Windows10的系统下进行了大量的仿真实验.通过20ˑ20的栅格环境,0表示障碍节点,1表示自由节点,环境中的所有障碍的范围都可以由各章障碍节点组合形成.对传统蚁群算法[14]㊁文献[10]中改进的蚁群算法和本文改进的蚁群算法在相同的障碍环境下进行仿真003李燕,等.基于改进蚁群算法的移动机器人路径规划方法.LIYan,etal.Mobilerobotpathplanningbasedonimprovedantcolonyalgorithm.比较.3种蚁群算法初始设置为蚂蚁的个数M=50,最大迭代数为200,α=0 9,β=4,ρ=0 2,Q=2.图3a 3c分别为传统蚁群算法㊁文献[10]蚁群算法以及本文改进蚁群算法的最优路径搜寻图,可以发现图3a和3b都能够在起始点到目标节点之间找到一条最短的移动路径,但传统的蚁群算法在初始环境相同的情况下明显比文献[10]蚁群算法得到的可行路径长.图3b和图3c相比,图3c中的最优路径长度优于图3b中的最优路径长度.图4a 4c分别为传统蚁群算法㊁文献[10]蚁群算法以及本文算法的收敛曲线.由图4a可以看出传统蚁群算法在复杂环境下收敛曲线波动较大,寻优能力极不理想,在大规模的环境中其缺点暴露得非常明显,在迭代第82次找到最优路径并逐渐趋于稳定.图4b显示文献[10]算法在迭代第69次找到最优路径,在迭代第69次后趋于稳定.本文算法收敛曲线(图4c)显示在迭代第59次找到最优路径,在此之后趋于稳定.通过3个算法收敛曲线的对比,明显可以看出:传统蚁群算法收敛曲线波动较大㊁转折点过多;文献[10]中的蚁群算法和改进的蚁群算法在达到最大迭代数时虽都已收敛,但本文改进的蚁群算法收敛速度更快㊁更稳定,寻优的效果更好.3种算法多次仿真实验的数据对比结果如表1所示.表1㊀仿真结果对比Table1㊀Simulationresults算法最优路径长度平均路径长度转折点数量收敛速度传统算法33 7989981 6988515较慢文献[10]算法31 2132061 6021814较快本文算法29 2132051 639559很快从表1中的实验数据可以看出,本文改进的蚁群算法相对于传统算法和文献[10]中的算法最优路径长度缩短,收敛的速度也更迅速,且在各代路线的平均长度也优于其他两种算法.本文改进的蚁群算法从起点到终点规划轨迹有9个转折点,而传统的蚁群算法转折点有15个,说明改进的算法具有更好的路径搜索效率.仿真结果表明本文改进的算法具有更好的路径规划效果.5㊀结束语本文利用栅格法的便捷性对环境进行建模,对每个栅格进行标记,应用改进的蚁群算法从初始栅格移动到目标栅格进行路径搜索,找到最优路径.本图3㊀最优路径搜寻效果对比Fig 3㊀Optimalpathsobtainedbytraditionalantcolony(a),algorithminRef.[10](b),andtheimprovedantcolonyalgorithm(c)103学报(自然科学版),2021,13(3):298⁃303JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdition),2021,13(3):298⁃303图4㊀收敛曲线Fig 4㊀Convergencecomparisonbetweentraditionalantcolony(a),algorithminRef.[10](b),andtheimprovedantcolonyalgorithm(c)文主要创新在于:1)针对传统算法搜索的目的性弱㊁不能快速搜索到可行路径的问题,通过改进启发函数,增加蚁群搜索的目的性,降低陷入局部最优解的概率;2)本文提出了一种自适应变化信息素总量的方式,通过迭代次数的增加对信息素总量进行调整,提高全局搜索能力,使算法获得较快收敛速度.通过实验仿真验证了改进后的蚁群算法的优越性和有效性.参考文献References[1]㊀陈志,韩兴国.改进蚁群算法在移动机器人路径规划上的应用[J].计算机工程与设计,2020,41(8):2388⁃2395CHENZhi,HANXingguo.Applicationofimprovedantcolonyalgorithminmobilerobotpathplanning[J].Com⁃puterEngineeringandDesign,2020,41(8):2388⁃2395[2]㊀刘泽,金世俊,王庆.基于改进蚁群算法的移动机器人二维路径规划[J].传感器与微系统,2020,39(10):149⁃152LIUZe,JINShijun,WANGQing.2Dpathplanningofmobilerobotsbasedonimprovedantcolonyalgorithm[J].TransducerandMicrosystemTechnologies,2020,39(10):149⁃152[3]㊀曹新亮,王智文,冯晶,等.基于改进蚁群算法的机器人全局路径规划研究[J].计算机工程与科学,2020,42(3):564⁃570CAOXinliang,WANGZhiwen,FENGJing,etal.Globalpathplanningofrobotsbasedonimprovedantcolonyal⁃gorithm[J].ComputerEngineeringandScience,2020,42(3):564⁃570[4]㊀李燕,钟磊.基于分子生物技术的DNA计算系统[J].淮海工学院学报(自然科学版),2014,23(4):9⁃13LIYan,ZHONGLei.DNAcomputingsystembasedonmolecularbiologytechnology[J].JournalofHuaihaiIn⁃stituteofTechnology(NaturalScienceEdition),2014,23(4):9⁃13[5]㊀洪越,殷利平.基于遗传算法的非高斯系统随机分布控制[J].南京信息工程大学学报(自然科学版),2020,12(4):504⁃509HONGYue,YINLiping.Geneticalgorithm⁃basedstochasticdistributioncontrolfornon⁃Gaussiansystems[J].JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdition),2020,12(4):504⁃509[6]㊀ColorniA,DorigoM,ManiezzoV.Distributedoptimizationbyantcolonies[C]ʊProceedingsofECAL91⁃EuropeanConferenceonArtificialLife,1991:124⁃142[7]㊀官娟,刘国华,刘天祺,等.基于MIMIC算法和RPCA的混合蚁群优化算法[J].南京信息工程大学学报(自然科学版),2020,12(5):569⁃576GUANJuan,LIUGuohua,LIUTianqi,etal.AhybridantcolonyoptimizationalgorithmbasedonMIMICalgorithmandRPCA[J].JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdi⁃tion),2020,12(5):569⁃576[8]㊀StützleT,HoosHH.MAX⁃MINantsystem[J].FutureGenerationComputerSystems,2000,16(8):889⁃914[9]㊀张原艺,章政,王泉.基于改进多步长蚁群算法的机器人路径规划[J].计算机工程与设计,2018,39(12):3829⁃3834,3866ZHANGYuanyi,ZHANGZheng,WANGQuan.Robotpathplanningbasedonimprovedmulti⁃stepantcolonyalgorithm[J].ComputerEngineeringandDesign,2018,39(12):3829⁃3834,3866[10]㊀占伟,屈军锁,芦鑫,等.基于改进蚁群算法的移动机器人全局路径规划[J].现代电子技术,2018,41(24):170⁃173ZHANWei,QUJunsuo,LUXin,etal.Globalpathplanningbasedonimprovedantcolonyalgorithmformo⁃bilerobot[J].ModernElectronicsTechnique,2018,41(24):170⁃173[11]㊀陈劲峰,黄卫华,王肖,等.基于改进蚁群算法的移动203李燕,等.基于改进蚁群算法的移动机器人路径规划方法.LIYan,etal.Mobilerobotpathplanningbasedonimprovedantcolonyalgorithm.机器人路径规划[J].高技术通讯,2020,30(3):291⁃297CHENJinfeng,HUANGWeihua,WANGXiao,etal.Re⁃searchonpathplanningbasedonanimprovedantcolonyalgorithmformobilerobot[J].ChineseHighTechnologyLetters,2020,30(3):291⁃297[12]㊀杜玉红,张岩,赵焕峰.基于参数优化蚁群算法的机器人路径规划研究[J].现代制造工程,2020(9):7⁃14DUYuhong,ZHANGYan,ZHAOHuanfeng.Researchonrobotpathplanningbasedonparametersoptimizedantcolonyoptimization[J].ModernManufacturingEngineer⁃ing,2020(9):7⁃14[13]㊀肖艳秋,焦建强,乔东平,等.蚁群算法的基本原理及应用综述[J].轻工科技,2018,34(3):69⁃72XIAOYanqiu,JIAOJianqiang,QIAODongping,etal.Summaryofthebasicprinciplesandapplicationsofantcolonyalgorithm[J].LightIndustryScienceandTech⁃nology,2018,34(3):69⁃72[14]㊀刘泽,金世俊,王庆.基于改进蚁群算法的移动机器人二维路径规划[J].传感器与微系统,2020,39(10):149⁃152LIUZe,JINShijun,WANGQing.2Dpathplanningofmobilerobotsbasedonimprovedantcolonyalgorithm[J].TransducerandMicrosystemTechnologies,2020,39(10):149⁃152MobilerobotpathplanningbasedonimprovedantcolonyalgorithmLIYan1,2㊀JIJiannan1㊀SHENJiali1㊀SURui11SchoolofAutomation,NanjingUniversityofInformationScience&Technology,Nanjing㊀2100442SchooloftheInternetofThingsEngineering,BinjiangCollegeofNanjingUniversityofInformationScience&Technology,Wuxi㊀214105Abstract㊀Antcolonyalgorithmhasslowconvergencerate,lowefficiencyandoftengetslocaloptimalsolution.Weproposeanadaptivewaytochangetheamountofpheromones,whichcanspeeduptheconvergencerate.Wealsoim⁃provetheheuristicfunctiontoincreasethepurposeofantcolonysearch,aswellasreducetheprobabilityoffallingintolocaloptimalsolution.Simulationsarecarriedouttoverifytheeffectivenessoftheproposedalgorithm,andtheresultsshowthattheglobaloptimalsearchabilityandconvergenceratearegreatlyimproved.Keywords㊀antcolonyalgorithm;gridmethod;pathplanning;pheromones303学报(自然科学版),2021,13(3):298⁃303JournalofNanjingUniversityofInformationScience&Technology(NaturalScienceEdition),2021,13(3):298⁃303。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 概述
智能移动机器人导航主要包括定位、避障和路径规划等 任务。路径规划问题是移动机器人工作最重要的基本环节之 一。路径规划是在起始点和目标点已知的情况下,按某一给 定的性能指标搜索一条从起始点到目标点近似最优的无碰路 径。根据环境信息已知程度的不同,路径规划可分为 2 种类 型:(1)环境信息已知的全局路径规划;(2)环境信息未知或部 分未知,必须用传感器进行实时环境探测以获取障碍物信息 的局部路径规划。路径规划算法的计算量取决于任务、环境 的复杂度以及对规划路径的质量要求。
(1. 南开大学信息技术与科学学院,天津 300071;2. 天津财经大学信息科学与技术系,天津 300222)
摘 要:研究机器人导航中的路径规划问题,运用栅格法和图论思想建立环境模型,在该模型中通过蚁群算法进行路径寻优,提出用遗传 算法的思想改进已有蚁群算法,即 GAA 算法。仿真实验结果表明,该算法能有效地提高机器人的路径搜索速度及路径优化、路径平滑等 方面的指标。 关键词:优化蚁群算法;GAA 算法;路径规划
第 34 卷 第 15 期 Vol.34 No.15
计算机工程 Computer Engineering
2008 年 8 月 August 2008
·博士论文·
文章编号:1000—3428(2008)15—0001—03 文献标识码:A
中图分类号:TP24
基于优化蚁群算法的机器人路径规划
任春明 1,2,张建勋 1
一结点的概率,并根据
迭 迭 概率选择移动蚂蚁
代代
递递
归归
进行信息素的
局部更新
选出本次迭代中承载本次 迭代最优路径信息的蚂蚁
进行信息素的全局更新
GA
N
交叉所得
路径是否优于迭代
Y
最优路径
随
进行交叉操作
对交叉最 优的蚂蚁
ห้องสมุดไป่ตู้
机 选
赋予“外
Y
激素”
择
一
只
是否与本次
蚂
迭代最优的蚂蚁经
蚁
相同的栅格
N
输出最优路径
图 2 改进后蚁群算法进行路径寻优的流程
简单蚁群算法的流程如图 1 所示。
开始
设置参数,初始化
评价蚁群
信息素更新
满足终止条件
Y
输出最短路径
N
概率选择移动方向 t:=t+1
图 1 基本蚁群算法流程
3.2 蚁群算法的改进 3.2.1 改变“信息素”更新策略
“信息素”更新机制的选择直接影响算法性能。“信息素”
—2—
更新机制的选取首要考虑 2 个问题:加强正反馈和增强解的 多样性。
—1—
的静态障碍物 Obj1 , Obj2 ,…, Objn ;在 AS 中建立系统直角坐 标系 Σ0,且以 AS 左下角为坐标 0 点,以横向为 X 轴,以纵 向为 Y 轴。AS 在 X 方向、Y 方向的最大值分别为 xmax 和 ymax 。 假设保证机器人能自由运动的活动范围为[0, Rc ],以 Rc 为 步长将 X, Y 分别进行划分,由此形成一个个栅格。考虑 AS 为任意形状,因此,可在障碍物边界补以障碍栅格,将其补 为正方形或者长方形,其中, Obji (i=1,2,…,n)占一个或多个 栅格,当不满一个栅格时,算一个栅格。
本文借鉴精英蚂蚁的思想[5]:在每次搜索迭代过程中, 局部地更新信息素,同时,在完成一次循环后,选出全局最 优蚂蚁,进行信息素全局更新。这样,采取全局最优蚂蚁的 信息素不断地进行全局更新,增强了正反馈机制,提高蚁群 算法的收敛速度;同时,采取局部更新与全局更新相结合, 增加了解的多样性,避免了早熟收敛。 3.2.2 遗传算法与蚁群算法的融合(GAA 算法)
路径规划的起始位置为 gbegin ∈ A ,且 gbegin ∉ OS ,终止
点 gend ∈ A ,且 gbegin ∉ OS , beginΛend ∈ S , begin ≠ end 。
2.3 栅格环境与图的逻辑对应 在 AS 中建立的栅格环境模型可以逻辑对应到图结构中。 图 G=<V, E>;V 为图中结点的集合,E 为逻辑边的集合。 所有的栅格环境都可以对应到图,在图中可以显示栅格
障碍物之间,为机器人寻找一条从给定的起始点到目标点的 满足一定优化指标的无碰撞路径。以 AS 表示无碰撞的自由位 形空间,路径规划问题可以描述为:给定一个起始结点 gbegin
和目标结点 gend ,在 AS 中寻找一条连接这 2 点的连续曲线, 并满足某些性能指标,或者确定不存在这样的连接。
机器人的路径规划主要包括环境建模、路径搜索、路径 平滑等环节[2]。建立环境模型是机器人路径规划的一个重要 环节。机器人的工作空间是一个现实的物理空间,而路径规 划算法所处理的空间是环境的抽象空间,环境建模是实现物 理空间到算法处理抽象空间的一个映射。先选择栅格法对环 境信息进行提取、处理和描述,并将环境信息存储为像元阵 列,然后吸收图论思想,将像元阵列映射到具有拓扑意义的 图中。 2.2 栅格划分环境空间
交叉操作是在蚁群完成一次循环后,随机选择的 2 只蚂 蚁之间进行的,而考虑到蚁群系统在更新信息素时只考虑迭 代最优的蚂蚁,若随机选择的蚂蚁不包含迭代最优的蚂蚁, 则对一次搜索的贡献不大。交叉操作是在迭代最优蚂蚁与随 机选择的其他蚂蚁之间进行,也可以按概率 Pc (交叉概率)从 整个蚁群随机的抽选一定数量的蚂蚁与迭代最优蚂蚁之间进 行交叉操作。
例如,在 10×10 的栅格环境中,栅格的单位长度为 1, 序号为 1 的栅格为起始栅格,序号为 100 的栅格为目标栅格。 假如,某次迭代最优蚂蚁路径经过的栅格点为(1, 2, 13, 24, 35, 46, 57, 67, 77, 87, 98, 99, 100),其路径长度为 15.1;随机选择 另外一只蚂蚁搜索到路径经过的栅格点为(1, 2, 13, 14, 15, 26, 37, 47, 57, 67, 77, 87, 97, 98, 99, 100),其路径长度为 15.8。
2 只蚂蚁经过的相同的栅格序号的集合为(12, 13, 57, 67, 77, 98, 99, 100),随机选择一个交叉点为 57 号栅格,可得 2 条交叉路径:
Path1:(1, 2, 13, 24, 35, 46, 57, 67, 77, 87, 98, 99, 100), 其路径长度为 14.5。
3 基于优化蚁群算法的路径寻优
机器人的路径规划问题属于带约束条件的连续函数求最 优值问题。在上述讨论中,利用栅格法建立了算法所能处理 的抽象的量化环境模型,下文将论述在环境模型中利用改进 蚁群算法进行路径搜索的整体思路。 3.1 蚁群算法的原理与工作流程
为了更清晰地阐述蚁群算法的基本原理[4],以图论的思 想描述路径规划问题:给定图 G =< V , E > ,其中,V 为节点 集合;E 为相邻 2 个节点连接组成的边的集合,并且知道边 的权值。路径规划问题就是在赋权图 G 的 2 个节点之间,找 出一条权值最小的路径。对于本文研究的机器人路径规划问 题,它的赋权图 G 为有向图。
传统遗传算法与蚁群算法的结合,实质是在不同阶段使 用不同算法,而不是真正意义上的融合。在本课题中,将遗 传算法交叉与变异的思想融入蚁群算法中,使 2 种算法的交 融与合作始终贯穿于问题空间的求解。
具体工作流程如图 2 所示。
ACO
初始化参数,生成信 息素初始分布,将蚂 蚁置于初始结点
计算每只蚂蚁移动到下
本文研究的全局路径规划包括环境建模和路径搜索策略 2 个方面。环境建模的主要方法有可视图法、自由空间法和 栅格法等。与前 2 种方法相比,栅格法具有精度高、易于实 现等特点,因此,被广泛采用。路径规划的主要搜索策略有 人工势场法、遗传算法和模糊逻辑算法等。人工势场法结构 简单,便于低层的实时控制,在实时避障和平滑的轨迹控制 方面得到了广泛应用。但它容易产生局部最优解问题,导致 死锁。遗传算法可以克服这一缺点,但遗传算法运算速度慢, 进化众多的规划将占据较大存储空间和运算时间,实时性差。 基于实时传感信息的模糊逻辑算法模拟人的规划经验,通过 查表得到规划信息,实现局部路径规划,克服了势场法的局 部极小问题,适用于时变未知环境下的路径规划。其实时性 较好但通用性差、得到的规划路径通常不是最优或近似优化 的[1-2]。
蚁群算法是 1991 年意大利学者 Dorigo 受到自然界中真 实蚁群集体行为研究成果的启发而提出的一种蚁群的模拟优 化算法。目前已经成功解决了诸如 TSP, QAP, JSP 等典型的优 化问题。本文将一种改进的蚁群算法应用于智能移动机器人
的路径规划中。
2 问题描述及环境模型的建立
2.1 问题描述 移动机器人最基本的路径规划问题是在完全已知的静态
Robot Path Planning Based on Improved Ant Colony Optimization
REN Chun-ming1,2, ZHANG Jian-xun1
(1. College of Information Technical and Science, Nankai University, Tianjin 300071; 2. Department of Information Science and Technology, Tianjin University of Finance and Economics, Tianjin 300222)
下面,对机器人路径规划的有关问题给出相应的约定: 记 g 为 任 意 栅 格 , 设 AS 中 的 栅 格 构 成 集 合 A , 记 OS = {O1,O2,L,On}∈ A 为 障 碍 栅 格 集 , 其 中 , obji (i = 1, 2,L, n) ∈ OS , g ∈ A 在 Σ0 都有确定的坐标 (x, y) ,记 作 g(x, y) 。设 S={1,2,…,m}为 栅 格 序 号 集 。 gi ∈ A 的 坐 标 (xi , yi ) 与序号 i ∈ S 构成互为映射关系。