ARM仿真器用户手册
J-Link 仿真器 说明书 (本手册适 V6.0、V7.0、V8.0 版本的 J-LINK)
J-Link用户指南(本手册适用于V6.0、V7.0、V8.0版本的J-LINK)1.J-Link ARM JTAG 仿真器简介J-Link 是 SEGGER 公司为支持仿真 ARM 内核芯片推出的 JTAG仿真器。
配合 IAR EWARM,ADS,KEIL,WINARM,RealView 等集成开发环境支持所有 ARM7/ARM9 内核芯片的仿真,通过 RDI 接口和各集成开发环境无缝连接,操作方便、连接方便、简单易学,是学习开发 ARM 最好最实用的开发工具。
J-Link ARM 主要特点* IAR EWARM 集成开发环境无缝连接的JTAG 仿真器* 支持所有 ARM7/ARM9 内核的芯片,以及 cortex M3,包括 Thumb 模式* 支持 ADS,IAR,KEIL,WINARM,REALVIEW 等几乎所有的开发环境* 下载速度高达 ARM7:600kB/s,ARM9:550kB/s,通过 DCC 最高可达 800 kB/s* 最高 JTAG 速度 12 MHz* 目标板电压范围 1.2V –3.3V,兼容5V* 自动速度识别功能* 监测所有 JTAG 信号和目标板电压* 完全即插即用* 使用 USB 电源(但不对目标板供电)* 带 USB 连接线和 20 芯扁平电缆* 支持多 JTAG 器件串行连接* 标准 20 芯JTAG 仿真插头* 选配 14 芯 JTAG 仿真插头* 带J-Link TCP/IP server,允许通过 TCP/ IP 网络使用J-LinkJ-Link 支持 ARM 内核* ARM7TDMI(Rev 1)* ARM7TDMI(Rev 3)* ARM7TDMI-S(Rev 4)* ARM720T * ARM920T*ARM926EJ-S*ARM946E-S*ARM966E-S* ARM11* Cortex-M3速度信息RevisionARM7Memory downloadARM9Memory downloadJ-Link Rev. 1-4 150.0 kB/s(4MHz JTAG)75.0 kB/s(4MHz JTAG)J-Link Rev. 5-8720.0 kB/s(12MHz JTAG)550.0 kB/s(12MHz JTAG)J-Trace Rev. 1420.0 kB/s(12MHz JTAG)280.0 kB/s(12MHz JTAG2.J-LINK 驱动安装J-LINK 是本站开发的兼容产品,具有一样的性能,但是却只有十分之一的价格!首先到/download_jlink.html 下载最新的 J-LINK驱动软,J-Link ARM software and documentation pack ,内含USB driver, J-Mem, J-Link.exe and DLL for ARM, J-Flash and J-Link RDI。
ARM_JTAG实时仿真器安装使用指南131新

ARM JTAG实时仿真器安装使用指南Version 1.312003. 11. 12目录第一章 ARM JTAG介绍JTAG产品介绍 (3)ARM第二章 ARM开发系统安装硬件连接 (4)2.1软件安装 (4)2.2第三章 ARM JTAG简单使用3.1 硬件连接 (18)软件使用 (18)3.23.2.1 启动Multi-ICE Server (18)3.2.2 启动ADS (21)第四章 ARM JTAG使用详解Multi-ICEServer使用 (33)4.1Server菜单选项..... (33)Multi-ICE4.1.1Server状态 (34)4.1.2Multi-ICEServer中的JTAG参数设置.......... . (38)Multi-ICE4.1.34.1.4 Multi-ICE Server配置 .................... . (40)调试系统架构体系 (41)4.24.3 ADS V1.2与ARM JTAG连接 (42)4.3.1 连接AXD (42)4.3.2 连接CodeWarrior (43)第五章最终应用程序烧写5.1应用程序在ARM板上运行原理 (45)生成“Boot.bin ” (45)5.25.2.1系统初始化 (45)5.2.2生成BIN文件 (45)烧录“Boot.bin” (47)5.3第六章ARM JTAG硬件介绍JTAG接口定义 (48)6.1ARMARMJTAG接口电平 (49)6.2TCK信号频率设置 (49)6.3RTCK时钟 (49)6.514脚和20脚JTAG接口转换 (50)6.6附录1 TCK频率设置 (51)附录2 常见问题 (53)2第一章 ARM JTAG介绍ARM JTAG产品介绍JTAG是用于ARM处理器内核软件调试的专用工具,符合IEEE 1149.1规范,与ARM原装 ARMMulti-ICE完全兼容。
ARM开发板使用手册

ARM开发板使用手册PHILIP LPC2132ARM7TDMI第一章介绍LPC2132开发板是专门为arm 初学者开发的实验板,用户可以做基础的arm实验,也可以做基于ucos-ii的操作系统实验。
本系统的实验源代码全部开放,用户可以在此基础上开发产品,减少重复劳动。
由于LPC2132体积很小,并且功能强大,因此特别适合需要复杂智能控制的场合,其运行速度高于早期的80486计算机,而体积只有指甲大。
我们已经将LPC2132产品成功应用在干扰比较强的工业场合,经过6个月的运行,各项指标符合要求。
因此我们特别推荐这一款开发板作为ARM初学者入门。
由于此款开发板体积很小,非常适合直接应用在工业以及民用智能控制器的场合。
LPC2132 CPU介绍LPC2131/2132/2138 是基于一个支持实时仿真和跟踪的16/32 位ARM7TDMI-STM CPU,并带有32kB、64kB 和512kB 嵌入的高速Flash 存储器。
128 位宽度的存储器接口和独特的加速结构使32 位代码能够在最大时钟速率下运行。
对代码规模有严格控制的应用可使用16 位Thumb 模式将代码规模降低超过30%,而性能的损失却很小。
较小的封装和很低的功耗使LPC2131/2132/2138 特别适用于访问控制和POS 机等小型应用中;由于内置了宽范围的串行通信接口和8/16/32kB 的片内SRAM,它们也非常适合于通信网关、协议转换器、软件modem、语音识别、低端成像,为这些应用提供大规模的缓冲区和强大的处理功能。
多个32 位定时器、1个或2 个10 位8 路的ADC、10 位DAC、PWM 通道、47 个GPIO 以及多达9 个边沿或电平触发的外部中断使它们特别适用于工业控制应用以及医疗系统。
主要特性●●16/32 位ARM7TDMI-S 核,超小LQFP64 封装。
●●8/16/32kB 的片内静态RAM 和32/64/512kB 的片内Flash 程序存储器。
Proteus仿真ARM7实验手册
5
选择模板
File > New Design
Proteus 仿真 ARM7 实验手册
选择 Landscape A4 模板 > OK。
选择模板
保存(Save Design):counter
添加模板
中国科学院西安网络中心 © 2007 - ARM7 实验手册
选取元件
Library > Pick Devices/Symbol….。
Edit Component 对话框
单击 Program File 的浏览按钮 ,添加已经编译好的目标程序文件 counter.hex,OK。
中国科学院西安网络中心 © 2007 - 2008
12
单击启动仿真按钮
Proteus 仿真 ARM7 实验手册
,运行仿真,单击电路图中按键可观察到数码管数字增大或减小。
电路原理图
打开 Keil 项目
打开已有的项目:Project > Open Project…
ARM仿真器应用指导
ARM仿真器应用指导ARM仿真器应用指导本文提供了一些关于在线ARM 仿真器的信息,以及给作为嵌入式系统设计师的你带来的好处。
根据你的需要,你将在产品开发中对开发工具作出更恰当的选择。
一、嵌入式产品的开发周期典型的嵌入式微控制器开发项目的第一个阶段是用C编译器从源程序生成目标代码,生成的目标代码将包括物理地址和一些调试信息。
目前代码可以用软件模拟器、目标Monitor或在线仿真器来执行和调试。
软件模拟器是在PC机或工作站平台上,以其CPU(如x86)及其系统资源来模拟目标CPU(如P51XA),并执行用户的目标代码;而目标Monitor则是将生成的目标代码下载到用户目标板的程序存储器中,并在下载的代码中增加一个Monitor任务软件,用来监视和控制用户目标代码的执行,用户通过目标板上的串行口或其它调试端口,利用桌面计算机来调试程序。
程序的调试是通过设置断点、使程序在指定的指令位置停止运行来实现的。
在程序中止的时候,检查存储器和寄存器的内容,作为发现程序错误的线索。
程序经过调试、找到所有的错误后,修改源代码,重新编译,以一种标准格式生成目标代码文件,比如Intel HEX。
这个目标代码将被存储在最终产品的非挥发存储器,比如EPROM或FLASH中。
二、为什么需要仿真器软件模拟器和目标Monitor提供了一种经济的调试手段,对于很多设计来说已经足够。
但是也有很多场合,需要利用仿真器来找到程序错误。
无论在哪一种场合,仿真器都能够减少调试时间、简化系统集成、增加可靠性、优化测试步骤,从而使其物有所值。
更常见的情况是工程师在项目的不同阶段同时使用软件模拟器和仿真器,特别是在大的开发项目中。
软件模拟器和软件调试器在断点之外只提供了很少的几种功能,比如显示端口内容和代码覆盖。
没有检测事件和条件、然后作出反应的手段,也没有办法记录MCU的总线周期、然后判断程序的执行究竟发生了什么情况。
如果你的MCU有片上EPROM或FLASH存储器,并且运行在单片模式,则只有仿真器才能够对系统进行调试,而不严重占用和消耗MCU资源。
ARM HSSTP II Active Probe 用户手册说明书

User ManualV2.6, August 2023/startGeneral safety instructionsPlease read the following safety precautions carefully before putting this device to use to avoid any personal injuries, damage to the instrument, or to the target system. Use this instrument only for its intended purpose as specified by this manual to prevent potential hazards.Use included power cord and power supplyThe enclosed power supply has been approved for use by iSYSTEM. Please contact iSYSTEM if you need to consider an alternative power.Use grounding wirePrior to applying power to either the BlueBox or the target, connect the device and the target system together with the included grounding wire. This is to avoid potential damage caused by any voltage difference between the device and the target system.Use proper overvoltage protectionEnsure proper protection to avoid exposing the BlueBox device or the operator to overvoltage surges (e.g. caused by thunderstorm, mains power).Do not operate without coverDo not operate the device with cover removed.Avoid circuit and wire exposureDo not touch exposed components or wires when the device is powered.Do not operate with suspected damageIf you suspect damage may have occurred, the BlueBox device must be inspected by qualified service personnel before further operation.Do not operate the device outside its rated supply voltage or environmental rangeConsult with iSYSTEM before using equipment outside of the parameters provided in this manual.This symbol is used within the manual to highlight further safety notices.ContentsPackage content (4)Specifications (5)Operation (6)mDIO Cable (8)40-pin Samtec ERF8 to 20-pin 2.54mm ARM Converter (9)40-pin Samtec ERF8 to 10-pin 1.27mm CoreSight and 40-pin Samtec ERF8 HSSTP Converter (10)10-pin 1.27mm CoreSight to 20-pin 2.54mm ARM Converter (13)40-pin Samtec / USB-C to USB-C (HSSTP) Switch (14)Hardware Setup and Configuration (18)Accessories (19)Active Probe ARM HSSTP II allows debugging, tracing and testing ARM® Cortex™ architectures. It supports both the JTAG debug interface and ARM High-Speed Trace Port (HSSTP). Its small and compact hardware size allows for connecting to a target microcontroller in a confined space as far as 10 m away. The Active Probe supports up to 4 parallel HSSTP lanes, running at a maximum bitrate of 5Gbps.The ARM HSSTP II Active Probe kit is delivered with the following components:ARM HSSTP II Active Probe 1m FNet CableSamtec40 -to 20-pin JTAGARM AdapterOrdering code: IC57125-1Ordering code:BB-FNET-100Ordering code:IASAM40ARMPIN20Blue colored signals are trace signals.Signal direction definition:O - Output from the Active Probe to the target microcontrollerI - Input to the Active Probe from the target microcontrollerThe target microcontroller connector is a Samtec ERF8 series, rugged high-speed socket, part number ASP-130367-01.B – mDIO port marked as TRIG on the housingmDIO port provides two digital signals, which can interact with the embedded target. Each can be configured either for input or output operation.mDIO port on the Active ProbeC – The indicator light provides the status of the Active Probe as follows:Permanently green – Powered on and ready to use.Blinking green – Establishing connection with the BlueBox.Blinking blue – Reprogramming SPLASH.Permanently magenta – Golden image loaded and ready to use.D – FNet connector, that connects the Active Probe to the iC5700 BlueBox. The FNet cable is delivered with the Active Probe.When powering on the system, switch the iC5700 on before powering on the target. When powering down the system, power off the target before powering off the iC5700!UseConsult with iSYSTEM before attempting to use any other accessory.Ordering code BB-AP-MDIO-20mDIO Cable is used to connect the Active Probe mDIO port with the signals around the debugged microcontroller, which can then be either read or controlled by the debugger. For example, the debugger can periodically service an external watchdog through the mDIO output or just read and record an external signal through the mDIO input. It must be ordered separately. Length of the cable is 20 cm.Ordering code IASAM40ARMPIN20In conjunction with this 40-pin Samtec ERF8 to 20-pin 2.54 ARM converter delivered in the package, the Active Probe can be connected to the target board featuring a 20-pin 2.54 mm ARM target debug connector providing the JTAG debug interface.This converter is required only when the Active Probe is to be connected to the embedded targetdebug interface without the ARM HSSTP tracethe Active Probe.Signal Direction is described from the BlueBox perspective.Ordering code IASAM40HSSTP-JTAGSAM Normally 40-pin ERF8 ARM HSSTP connector provides both, ARM HHSTP trace interface and JTAG or SWD debug interface. However, some targets for some reason don’t connect debug interface to this connector and provide the debug JTAG/SWD interface on a separate debug connector (10-pin 1.27mm CoreSight). Using this adapter, the Active Probe can be properly connected to such target.This converter is required only when the Active Probe is to be connected to the embedded targetJTAG/SWD interface physically connected but has10-pin 1.27 mm CoreSight target debug connector.The adapter doesn’t come along the Active Probe and has to be ordered separately.The converter has the following pinouts:A – 40-pin Samtec ERF8 connector providing merged JTAG/SWD debug signals (C on the image) and the HSSTP trace signals (B on the image) signals, to which the Active ProbeB – 40-pin Samtec ERF8 connector which connects to target development board with 40-pinBlue colored signals are trace signals.C – 10-pin CoreSight connector which connects to the target development board exposingSignal Direction is described from the BlueBox perspective.Related to the just described converter IASAM40HSSTP-JTAGSAM, the target development board can also feature a 20-pin 2.54 mm ARM target debug connector instead of the 10-pin 1.27 mm CoreSight. In order to connect the C part of the IASAM40HSSTP-JTAGSAM to this connector, another converter IA10PINCS20PINARM-1 is required, converting from ARM 20-pin 2.54mm to 10-pin 1.27 CoreSight. The IA10PINCS20PINARM-1 connects to the target and then the ‘C’ point of the IASAM40HSSTP-JTAGSAM connects on top of it.Ordering code IA10PINCS20PINARM-1This converter is required only when the Active Probe is to be connected to the embedded target providing the 20-pin 2.54 mm ARM target debug connector exposing only the debug interface without the ARM HSSTP trace interface. No trace interface (e.g. SWO, parallel) is supported with this converter. The converter is delivered along the Active Probe. Refer to ARM HSSTP II Active Probe User Manual for more information.* nTRST is permanently pulled upSignal Direction is described from the BlueBox perspective.Ordering code IEA-SWITCH-SAM40USBCThrough this hardware switch, you can conveniently connect·ARM HSSTP II Active Probe·and a host PC via a standard USB-C connectionto NVIDIA Orin device (connection marked as ORIN USB-C) at the same time. This switch is optional and must be ordered separately.A use case is that an application is programmed by the PC-based flash programming utility through the USB-C connection, and later, the application is debugged using the ARM HSSTP II Active Probe. Refer to the Technical Note NVIDIA Orin: USB port functionality switching for a use case where the switching can be automated.Switch configurationConnectorsThe switch features two USB-C connectors:·ORIN USB-C with a custom pinout for connection with the NVIDIA Orin device,·HOST USB-C for connection with the host PC (standard USB connection).Blue colored signals are trace signals.* Pulled down with 5k1 resistor.Blue colored signals are trace signals.Signal Direction is described from the BlueBox perspective.When connecting the BlueBox to a target for the first time, doubleadapterfailure.OrientationWhen connecting the switch ORIN USB-C connector to NVIDIA Orin target, make sure the connector is oriented correctly. Pay attention to the ORIENTATION LED indicator located on the Switch. The green LED lits when ORIN USB-C connector is properly connected to the NVIDIA target. If the red LED lits, rotate the ORIN USB-C connection.·Red – Wrong·Green – OKFor detailed visual presentation of the hardware setup and configuration, refer tostarted tutorial1. Connect the power supply cable. BlueBox should be switched off.2. First connect via USB. Later you can configure TCP/IP connection to work remotely.3. Connect the Grounding wire to the BlueBox and the Target.IfBlueBox and the Target can exceed well over 1000V even before any of the devices arepoweredleading to the possible destruction of electronic components.4. Connect FNet cable of Active Probe to the BlueBlux FNet port.Although it looks similar to the HDMI interface, theHDMI or any HDMI accessoriesConnecting iSYSTEM hardware to HDMI accessories will damage the hardware and willrender the iSYSTEM hardware warranty void.5. Power ON the hardware in the following order:a.BlueBoxb.Target6. Install winIDEA and create a new workspace.7. Configure Debug channel modes via Hardware / CPU Options / SoC.For troubleshooting refer to Knowledge Base - .More general settings are described in winIDEA Help.Please refer to the iC5700 BlueBox for all current iC5700 accessories.More information about our products onVisit our website for:·Support - /support ·Tutorials - /getting-started ·Knowledge Base - 。
仿真器使用说明书
1 ARM_STAR仿真器简介功能介绍ARM_Star 仿真器是一款为广大ARM工作者设计的高性能仿真器,ARM_Star仿真器完全实现ARM RDI 1.5和RDI 1.51协议,与ARM Multi-ICE™ 兼容,支持所有含有Embedded-ICE Logic的ARM 内核CPU, 在调试软件的控制下,ARM_Star仿真器可以停止、启动ARM CPU的运行,用户通过ARM_Star仿真器察看、修改寄存器,存储器,设置断点、单步执行,下载烧写Flash程序等。
主要特点:程序下载速度快与PC机的通信速度最高可达到12M, 下载速度达到100K---200Kbytes每秒,单步速度可达85步每秒。
支持调试软件多支持的调试软件有ADS、SDT、GreenHill Multi2000、IAREWARM等,极大地方便了用户。
支持CPU种类丰富支持几乎所有含ARM内核CPU, 如ARM7、ARM9、ARM10、Intel Xscale等JTAG口频率可编程,支持各类不同性能目标板开放式接口支持多个内核串联的CPU调试,极大的体现了JTAG调试器的优势。
无需外加电源ARM_Star仿真器功耗低,可以直接从目标板取电,和目标板共用一个电源系统,使用及外出携带方便免费升级由于ARM_Star的FirmWare是每次上电时直接下载到仿真器的,所以,用户可以随时使用最新版本。
2 ARM_STAR仿真器硬件使用方法2.1 ARM_STAR仿真器对PC机的配置要求:系统环境Win95, Win98, Windows Me, Win2000, Windows XP Windows NT 4.0 及以上版本。
硬件环境Pentium 200MHz 以上CPU64M 内存300M 硬盘空间计算机并行口2.2 ARM_STAR仿真器的功能框图DB25并行接口用于仿真器跟PC机的通信,连接线为普通并口延长线。
20针IDC20 JTAG接口用于连接仿真器和目标板的JTAG口。
E-LINK ARM 仿真器 JLINK使用手册及固件升级
E-Link用户指南编制支持:嵌入式联盟()2011年6月目录1. E-Link ARM JTAG仿真器简介 (3)2. E-LINK驱动安装 (5)3. E-LINK在各个主流开发环境下的设置 (8)3.1. K eilMDK开发环境 (8)3.2. A DS开发环境 (12)3.2.1 E-LINK 在ARM11 (Tiny6410/Mini6410)上的调试 (22)3.3. I AR开发环境下使用E-Link (26)4. J-FLASH ARM使用设置 (36)附录:E-LINK 与 J-LINK V8 对比 (43)1. E-Link FOR ARM仿真器简介E-Link FOR ARM(本文中简称E-Link), 是专为ARM开发设计爱好者调试、仿真以及下载(Debug & download )而推出的JTAG 仿真调试工具。
作为一款专用的ARM JTAG仿真器,E-LINK兼容目前市面大多数JLINK仿真器功能,可配合IAR EWARM,ADS,KEILMDK,WINARM,RealView 等集成开发环境,支持了几乎所有的ARM7/ARM9/ARM11 内核芯片的仿真,通过RDI 接口和各集成开发环境无缝连接,E-LINK突出的亮点之一——支持全自动固件升级,堪称完美地解决了困扰广大学习开发者的固件升级问题。
连接、操作极为方便,易于上手。
E-LINK适用于当前各类主流ARM开发板的仿真调试,是学习开发ARM最具实用价值的开发工具。
可直接使用于各类STM32,2440,6410系列开发板,能够与友善之臂 mini2440/micro2440/ mini6410/Tiny6410,飞凌FL2440/OK6410,华天正Real6410 等产品完美配合。
E-Link 基本介绍如下图所示:* E-LINK 的内部全部采用原装进口芯片,如 CPU,双缓冲,USB口保护电路,ESD ,自动恢复保险丝,包括3.3V电源芯片等; E-LINK的外部结构采用红色铝合金金属外壳。
ARM软件使用说明书
ARM软件使用说明书图像区域选择:点击区域,会出现一个黑色边框,代表已经被选中工具栏:1、扫描按钮,当点击扫描按钮后,启动CIS开始扫描2、停止按钮,当点击停止按钮后,停止CIS的扫描3、打开按钮,当点击打开按钮后,可以导入jpg或bmp图片4、保存按钮,当点击保存按钮后,针对当前选择图片进行保存替换5、另存为按钮,当点击另存为按钮后,针对当前选择图片进行另存为保存操作6、删除按钮,当点击删除按钮后,针对当前选择的图片删除7、放大按钮,当点击放大按钮后,针对当前选择的图片进行放大8、缩小按钮,当点击缩小按钮后,针对当前选择的图片进行缩小9、还原比例1:1按钮,当点击还原比例1:1按钮后,针对当前选择的图片进行还原大小10、打印按钮,当点击打印按钮后,针对当前选择的图片进行打印11、打印预览按钮,当点击打印预览按钮后,针对当前选的的图片进行相对应的操作,然后打印12、配置按钮,当点击配置按钮后,会弹出一个窗体,可以修改当前扫描的模式,例如:dpi、幅面右边框设置:1、扫描后自动对图片做的操作,可以选自动裁剪(自动裁剪是对图片多余的地方进行裁剪2、图片模式,扫描出来的图片需要保持的格式选择3、保存路径,扫描出来的图片保存的路径右边框操作:1、左转按钮,针对选择的图片进行左转操作2、右转按钮,针对选择的图片进行右转操作3、水平按钮,针对选择的图片进行水平操作4、垂直按钮,针对选择的图片进行垂直操作5、自动裁剪按钮,针对选择的图片进行图片多余的地方进行裁剪6、手动裁剪按钮,针对选择的图片在相对应的区域画出一个矩形,进行裁剪7、图像调节按钮,弹出一个窗体,针对当前选的图片进行亮度、对比度的操作。
普中ARM仿真器使用说明书

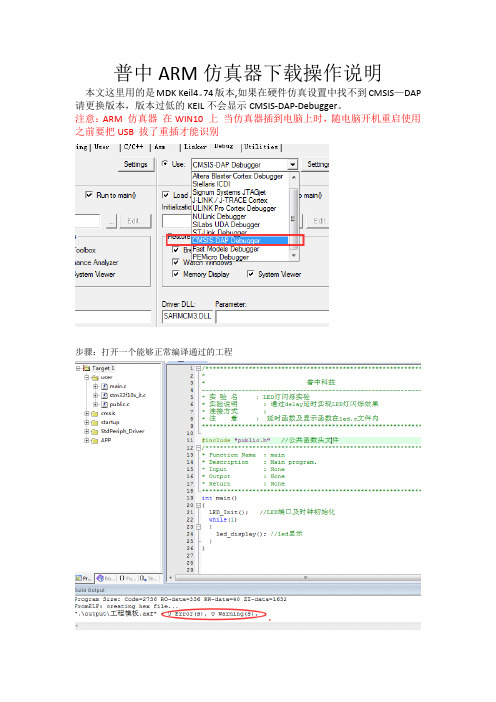
普中ARM仿真器下载操作说明本文这里用的是MDK Keil4.74版本,如果在硬件仿真设置中找不到CMSIS-DAP请更换版本,版本过低的KEIL不会显示CMSIS-DAP-Debugger。
注意:ARM 仿真器在WIN10 上当仿真器插到电脑上时,随电脑开机重启使用之前要把USB 拔了重插才能识别步骤:打开一个能够正常编译通过的工程1、进入KEIL硬件仿真设置2、设置好硬件仿真后我们点Settings进入更深入的设置,请按照我这个面板这样设置。
(PS:这里我们也可以选择SW模式,把SWJ勾上Port选择SW就是SW模式了)3、设置好debug页面。
我们点击Flash Download进入下载设置把Rese and Run勾上4、点击add我们就来到了这一个页面,找到STM32F10x High-density Flash 512k 选中点add添加就回到第4步页面,有显示STM32F10x High-density 512k 点ok完成设置。
6、完成以上设置后我们点Utilities页面,这里也选择CMSIS-DAP选择好之后我们点ok 完成设置(ps:如果这个界面没有Use Target for flash Programming选择CMSIS-DAP 就忽略这一项)7、(keil下载)设置好之后我们编译程序没问题我们点Download进行下载提示Verify OK 就说明已经下载成功了8、(在线仿真调试)我们可以直接在keil里面调试程序,点工具栏的start debug 开始调试,如果退出也是点这个按钮点击之后我们就来到了这个页面,RST是复位的意思、第二个是全速运行、第三个是停止运行,再过来就是我们程序检查程序中错误的时候会用到的功能的,第一个箭头是单步运行、第二个和第一个功能差不多,第三个是跳出这个函数,第四个是进入函数内部。
这四个功能大家可以自己运行体验一下效果就能理解是什么意思了。
ARM系统说明书V6.5
ARM系统操作说明菜单总图第一章操作说明1. 系统开机后显示第0屏(系统信息屏),见图1:图11)按“”键,机床回零位后,取参数默认值进入第1屏“主界面”。
2)按“”键,机床回零位后,参数取上次保留值进入第1屏“主界面”。
3) 按“”键,机床直接进入第1屏“主界面”,参数取上次保留值。
4) 按“”键,机床直接进入第1屏“主界面”,参数取系统默认值。
2. 进入第1屏(主界面屏),见图2:图2图中(M)表示当前X,Y,Z为机械坐标,(C)表示当前X,Y,Z为工件坐标。
在此屏中可通过按“”键切换;F××表示设定的加工速度是××mm/min;S××表示主轴转速为××转/min;L××表示当前运行的行号;T××表示当前文件加工的时间;(U)表示当前加工的是U盘中的文件。
或(F)表示当前加工的是内存中的文件;05/12/22 16:53表示当天日期和北京时间。
3.按“”键进入参数设定屏(第2屏),见图3:图3按键盘中的复用键' ',' ',' ',' '进入对应屏。
1)按' '键进入机床参数屏(第3屏),见图4:图4在此屏:a)按‘’键进入速度设定屏(第7屏),见图5:图5在第7屏中可以设定加工时的雕刻速度(进给速度),空跑速度(空程速度),手动对刀时的速度(手动速度),此系统的最大速度。
(单位:mm/s)注:在主界面屏,按‘’快捷方式直接进入此屏。
b)按‘’键进入机床设定屏(第8屏),见图6:图6在第8屏中可以设定加工时的起始速度(0.8mm/s),加速度(250mm/ss).螺距数(10mm)和脉冲数(3200转/圈)只能查看不能修改。
c)按‘’键进入原点设定屏(第10屏),见图7:图7在第10屏中可以设定当前加工文件的零点坐标(即原点坐标)。
ARM仿真器使用手册
上海勤旺电子技术有限公司 Intel XScale 实测芯片:PXA250,IXP420,IXP422,IOP321 80200 等 ARM7EJ-S ARM740T ARM9E-S ARM922T ARM966E-S ARM1020E 测试芯片:ARM 通用平台以及用户自己定制的 SoC 芯片 支持的操作平台: Windows 95、98、NT、2000、XP、MeRedHat Linux 6.2 / 7.1 支持的开发环境: IAR EWARM,MULTI2000,ADS1.2,ADS1.1,SDT2.51,MetaWare ARM Product 4.5a 等 所有支 RDI 协议调试的开发环境。 使用方法: 通过 20 芯带线 JTAG 连接目标板,目标板可以有一个 ARM 内核 CPU,或者几个 ARM 内核 CPU。witrace-ice 通过 DB25 连线连接计算机并口,同时计算机运行服务程序,开 发者可以 直接在这台计算机进行开发,也可以在网络中其他计算机上进行开发,可以同 时多人进 行开发,每个开发者可以同时对目标板上不同内核进行调试。
出现如下界面:
最新的 USB 接口仿真器,解决笔记本没有并口的问题
上海勤旺电子技术有限公司 导入配置文件。
最新的 USB 接口仿真器,解决笔记本没有并口的问题
上海勤旺电子技术有限公司 在出现的文件选择筐中选择 S3C2410 的配置文件。
点击打开。
最新的 USB 接口仿真器,解决笔记本没有并口的问题
上海勤旺电子技术有限公司 这时,打开 ADS,就可以开始你的 2410 的调试之旅啦。
最新的 USB 接口仿真器,解决笔记本没有并口的问题
点击红圈所示位置,出现如下界面:
iar arm 使用手册
IAR ARM是一款强大的嵌入式开发工具,它支持多种ARM处理器,并提供了一套完整的开发环境。
以下是IAR ARM的使用手册:
1.打开IAR ARM软件,选择合适的ARM处理器型号。
2.创建一个新的项目,选择合适的项目模板,并设置项目属性,如项目名称、
存储位置等。
3.在项目浏览器中,可以查看项目文件结构,包括源代码文件、头文件、链接
脚本等。
4.在代码编辑器中编写代码,可以使用IAR ARM提供的各种工具和功能,如代
码模板、代码补全、语法高亮等。
5.配置调试器,设置断点、观察点和跟踪等调试信息。
6.编译和烧写程序到目标板中,可以使用IAR ARM提供的各种工具和功能,如
一键烧写、ISP烧写等。
7.在仿真器中运行和调试程序,可以使用各种调试手段,如单步执行、观察变
量值等。
8.生成可执行文件或固件包,可以用于产品发布或升级。
Olimex TMS320-XDS100-V3 数字信号处理器和 ARM 仿真器和适配器用户手册说明
TMS320-XDS100-V3DSP and ARM emulator and adapter USER’S MANUALRevision F, March 2015Designed by OLIMEX Ltd, 2013All boards produced by Olimex LTD are ROHS compliantDISCLAIMER© 2015 Olimex Ltd. Olimex®, logo and combinations thereof, are registered trademarks of Olimex Ltd. Other product names may be trademarks of others and the rights belong to their respective owners.The information in this document is provided in connection with Olimex products. No license, express or implied or otherwise, to any intellectual property right is granted by this document or in connection with the sale of Olimex products.It is possible that the pictures in this manual differ from the latest revision of the board.The product described in this document is subject to continuous development and improvements. All particulars of the product and its use contained in this document are given by OLIMEX in good faith. However all warranties implied or expressed including but not limited to implied warranties of merchantability or fitness for purpose are excluded. This document is intended only to assist the reader in the use of the product. OLIMEX Ltd. shall not be liable for any loss or damage arising from the use of any information in this document or any error or omission in such information or any incorrect use of the product.This evaluation board/kit is intended for use for engineering development, demonstration, or evaluation purposes only and is not considered by OLIMEX to be a finished end-product fit for general consumer use. Persons handling the product must have electronics training and observe good engineering practice standards. As such, the goods being provided are not intended to be complete in terms of required design-, marketing-, and/or manufacturing-related protective considerations, including product safety and environmental measures typically found in end products that incorporate such semiconductor components or circuit boards.Olimex currently deals with a variety of customers for products, and therefore our arrangement with the user is not exclusive. Olimex assumes no liability for applications assistance, customer product design, software performance, or infringement of patents or services described herein.THERE IS NO WARRANTY FOR THE DESIGN MATERIALS AND THE COMPONENTS USED TO CREATE TMS320-XDS100-V3.THEY ARE CONSIDERED SUITABLE ONLY FOR TMS320-XDS100-V3.Table of Contents DISCLAIMER (2)CHAPTER 1 OVERVIEW (4)1. Introduction to the chapter (4)1.1 Features (4)1.2 Target market and purpose of the board (5)1.3 Organization (5)CHAPTER 2 SETTING UP THE TMS320-XDS100-V3 (6)2. Introduction to the chapter (6)2.1 Electrostatic warning (6)2.3 Requirements (6)2.4 Cables, layouts, connection (6)2.5 Powering the board and installation procedure for CCS v5 and CCS v6 (8)2.6 Powering the board and installation procedure for IAR EW for ARM 6 (9)CHAPTER 3 TMS320-XDS100-V3 DESCRIPTION (10)3. Introduction to the chapter (10)3.1 Layout (top view) (10)CHAPTER 4 INTERFACES AND HARDWARE (11)4. Introduction to the chapter (11)4.1 JTAG connectors (11)4.1.1 JTAG (11)4.1.2 TI_JTAG_14 (11)4.1.3 TI_JTAG_20 (11)4.1.4 ARM_JTAG_20 (11)4.2 USB mini (12)4.3 Test pads (12)4.4 LEDs (12)4.4.1 Power LEDs (12)4.4.2 D3 and D4 (12)4.5 Jumpers (12)4.5.1 Jumper ARM_JTAG_E (12)4.5.2 Jumpers J4 and J5 (12)CHAPTER 5 REVISION HISTORY AND SUPPORT (13)5. Introduction to the chapter (13)5.1 Document revision (13)5.2 Hardware revision (14)5.3 Useful web links and purchase codes (15)5.4 Product support (16)CHAPTER 1 OVERVIEW1. Introduction to the chapterThank you for choosing the TMS320-XDS100-V3 emulator from Olimex!TMS320-XDS100-V3 is an implementation of the Texas Instruments' ultra-low-cost USB-interface JTAG hardware reference design. This emulator provides JTAG access to Texas Instruments' JTAG-based devices.This document provides a user’s guide for the Olimex TMS320-XDS100-V3. As an overview, this chapter gives the scope of this document and lists the board’s features. The document’s organization is then detailed.1.1 FeaturesAmong the features of the Olimex implementation of the XDS100v3 design are:•TMS320-XDS100-V3 hardware is designed to work with CCS5 or CCS6 software•Grants free license for TI's Code Composer Studio 5 and TI's Code Composer Studio 6•Supported in IAR EW for ARM (for IAR versions after 6.40)•Equipped with three JTAG connectors for different JTAG layouts: TI 14-pin JTAG; TI 20-pin JTAG and standard ARM 20-pin JTAG layout•All plastic headers have 0.1" pin step for easier access•Two compatible female-female cables included – 14-pin and 20-pin ones.•Works with targets in 1.65V-5.0V range•No need for external power supply, all power is taken from USB and the target•IEEE 1149.7 capable emulator with a USB interface•Can function as an 1149.7 adapter for use with existing scan controllers.•Software compatible with XDS100v2 (except link delay and IEEE 1149.7 modes)•Physical jumper to select emulator or adapter mode•Operates in 1149.7 Class 4, up to 25MHz•LED to indicate IEEE 1149.7 Class 4 operation•LED to indicate operation in adapter mode•Supported devices: TMS320C28xx, TMS320C54xx, TMS320C55xx, TMS320C674x, TMS320C64x+, TMS320C66x, ARM9, ARM Cortex A9, ARM Cortex A8, ARM CortexM3, ARM Cortex R4•Board dimensions (4.15×1.8)" ~ (10.5×4.6)cmFor full list of XDS100v3 design features visit the TI's wiki address:/index.php/XDS100#What_is_the_XDS100.3F1.2 Target market and purpose of the boardThe main purpose of the board is programming and debugging Texas Instruments' JTAG-based devices. Typically, these are DSP (digital signal processing) targets AND high-speed ARM targets. The board can also act as adapter to existing scan controllers.The design of the board follows the schematics and the recommendations provided by Texas Instruments.1.3 OrganizationEach section in this document covers a separate topic, organized as follow:–Chapter 1 is an overview of the board usage and features–Chapter 2 provides a guide for quickly setting up the board–Chapter 3 contains the general board diagram and layout–Chapter 4 mentions the main software tools used with TMS320-XDS100-V3–Chapter 5 is an explanation of the interfaces, the LEDs, the jumpers position–Chapter 6 contains the revision history, useful links and support informationCHAPTER 2 SETTING UP THE TMS320-XDS100-V32. Introduction to the chapterThis section helps you set up the Olimex TMS320-XDS100-V3 emulator/adapter for the first time. Please consider first the electrostatic warning to avoid damaging the board, then discover the hardware and software required to operate the board.The procedure to power up the board is given, and a description of the default board behavior is detailed.2.1 Electrostatic warningTMS320-XDS100-V3 is shipped in a protective anti-static package. The board must not be exposed to high electrostatic potentials. A grounding strap or similar protective device should be worn when handling the board. Avoid touching the component pins or any other metallic element.2.3 RequirementsIn order to set up the TMS320-XDS100-V3 optimally, the following items are required:- USB-A to mini-USB cable- Set of software tools (preferably Code Composer Studio v5 or Code Composer Studio v6 – check the table – /index.php/XDS100#XDS100_Installation_Instructions)- a TARGET from the supported list (can be found here:/index.php/XDS100#Installation_for_Code_Composer_Studio_v5.1.x) Note that there are two ribbon cables included in the package – for the TI_JTAG_14 and theTI_JTAG_20 (or ARM_JTAG) connectors.2.4 Cables, layouts, connectionInitially there might be a slight confusion for the proper cable setup which is caused by the number of different connectors you might meet working with Texas Instruments ARM processors.The TMS320-XDS100-V3's 14pin JTAG connector named “TI_JTAG_14” has the exact layout of TI's 14pin JTAG. Both connectors have 0.1'' step.The 20pin TI JTAG connector is named “TI_JTAG_20”. It might be found next to the 14pin JTAG of TMS320-XDS100-V3. TI_JTAG_20 follows the signal layout proposed by Texas Instruments but it uses bigger connector with pin holes with 0.1'' step again (the original CTI design suggests 0.05''). The 20pin ARM JTAG connector is named “ARM_JTAG”. It is located at the edge of the top side of the board. ARM_JTAG is the official ARM 20-way 0.1'' pitch connector. The signal layout also follows the ARM recommendations. It can be used in either standard JTAG (IEEE 1149.1) mode or Serial Wire Debug (SWD) mode.Refer to the table below for the proper connections. The first 4 columns represent the TI layout of TI_JTAG_14 and TI_JTAG_20 connectors of TMS320-XDS100-V3, the last 2 show the 20-pin ARM_JTAG layout.*The entries NA means the standard signal was not routed (was not used for the JTAG connection). **The value of TDIS is controlled by the ARM_JTAG_E jumper. If you use ARM_JTAG connector keep the jumper closed. If you use TI_JTAG_14 or TI_JTAG_20 – open the ARM_JTAG_E jumper.A useful table for the relations of the signals might be found at the following web address: /index.php/JTAG_Connectors#Pinout2.5 Powering the board and installation procedure for CCS v5 and CCS v6 The XDS100v3 board is powered via the mini USB.A. Install Code Composer Studio 5.1.x (or newer) before connecting XDS100 USB hardware.B. Install the EmuPack with XDS100v3 support. It is usually downloaded via the update button.C. Connect the XDS100 hardware1. Make sure the Code Composer Studio v5.1.x (or newer) and EmuPack with XDS100v3support is installed FIRST before plugging in the XDS100 HW to the PC.2. Connect USB cable from the PC to the XDS100 hardware. Connect the JTAG to thetarget board (be careful to plug it in correctly: pin 1 should go to pin 1. Red strip usually indicates the side of pin 1)3. You will notice small popups to inform user that USB hardware is recognized andinstalled correctly. No input are required.D. Setup Code Composer Studio v5.1.x4. Start Code Composer Studio and create a new target configuration.5. Select XDS100v3 as connection type6. Select device (target).E. The configuration of the emulator in CCS v5.1.x is shown below (the one in CCS v6 is quite similar):2.6 Powering the board and installation procedure for IAR EW for ARM 6A. Install IAR EW for ARM (version 6.40 or newer) before connecting XDS100 USB hardware.B. Connect the TMS320-XDS100-V3 to the mini USB of a computer.C. Install the drivers for XDS100v3 hardware – there is an executable typically located in“C:\Program Files (x86)\IAR Systems\Embedded Workbench for ARM 6\arm\drivers\ti-xds”D. Load a demo project and right-click over the project in the “Workspace” window. Select “Options” and click the “Debugger” group then choose “TI XDS100” from the drop-down menu. Then in the tab under the “Debugger” group go to “TI XDS100” and from the emulator menu select “TI XDS100v3 USB Emulator”.E. You are now ready to debug your project!CHAPTER 3 TMS320-XDS100-V3 DESCRIPTION3. Introduction to the chapterHere you get acquainted with the main parts of the board. Note the names used on the board differ from the names used to describe them. For the actual names check the TMS320-XDS100-V3 board itself.3.1 Layout (top view)CHAPTER 4 INTERFACES AND HARDWARE4. Introduction to the chapterIn this chapter the connectors function will be pointed, the meaning of the LEDs states will be explained, and the function of the jumpers would be clarified.4.1 JTAG connectorsThere are four JTAG connectors on this board. Each of them has 0.1'' step between pins. They are in the sub-chapters below.4.1.1 JTAGThe JTAG connector (note the one WITHOUT any prefix or suffix to the name) is used during production to upload the firmware of TMS320-XDS100-V3. It has a 14-pin TI JTAG layout.You can not program targets using this connector! It is used to program the emulator itself!It can be used to restore the firmware of the the unit. The firmware is located inside the FPGA integrated circuit.4.1.2 TI_JTAG_14Used for 14-pin TI JTAG connection. The TI_JTAG_14 follows the JTAG layout of Texas Instruments. This interface might be used to communicate with Olimex TMS320-P28016 and Olimex TMX320-P28027. The interface might be used with any target that follows the 14-pin TI JTAG layout.Jumper ARM_JTAG_E has to be open to be able to use TI_JTAG_14 successfully!4.1.3 TI_JTAG_20Used for 20-pin TI JTAG connection. The TI_JTAG_20 follows the JTAG layout of Texas Instruments. Note that the step is different from the original TI JTAG connector. The original connector has a 0.05'' step connector, while the one used by Olimex has 0.1''. The interface might be used with any target that follows the 20-pin TI JTAG layout.Jumper ARM_JTAG_E has to be open to be able to use TI_JTAG_20 successfully!4.1.4 ARM_JTAG_20ARM_JTAG_20 connector was added in hardware revision C. It is used for 20-pin ARM JTAG connection. The interface might be used with any TI target that follows the 20-pin ARM JTAG layout. For example, boards like “Stellaris EKS-LM3S3748” can be debugged externally only using tools with ARM JTAG layout.Jumper ARM_JTAG_E has to be closed to be able use ARM_JTAG_20 successfully!4.2 USB miniStandard USB mini cable connector. Used to connect the emulator to a personal computer.4.3 Test padsThere are six testpads provided (CTS; RXD; GND; RTS; RXD; 3.3V). They allow access to the FTDI chip of the board. They can be used for debugging purposes and also for direct communication with the FT2232HL IC. The names are easily visible near each pad.4.4 LEDsThere are four LEDs on TMS320-XDS100v3. Two for indicating power input and power output and two for the current board-mode.4.4.1 Power LEDsThe PWR_LED shows whether the board is powered. The PWR_EN shows whether the board can power the target.4.4.2 D3 and D4The D3 and D4 LEDs show the state of, respectively, J4 and J5 jumpers.4.5 JumpersThere are three PTH jumpers on TMS320-XDS100-V3: ARM_JTAG_E, J4, and J5.4.5.1 Jumper ARM_JTAG_EThe value of pin 4 (signal “TDIS”) of every JTAG interface is controlled by ARM_JTAG_E jumper. Important:In the Texas JTAG layouts TDIS is used to detect when the target is disconnected from the emulator. It is usually a pull-up in the emulator and GND on the target. The emulator senses the removal of GND. If you use TI_JTAG_14 or TI_JTAG_20 – open the ARM_JTAG_E jumper.Pin 4 needs to be pulled-down in the ARM JTAG layout. If you use ARM_JTAG connector keep the jumper closed.4.5.2 Jumpers J4 and J5They are responsible for the emulation – adapter configuration. When J4 and J5 are open – the chosen mode is emulator mode. When J4 an J5 are closed the chosen mode is adapter.For general use of the TMS320-XDS100-V3 as emulator and debugger, please, keep jumpers J4 and J5 open.CHAPTER 5 REVISION HISTORY AND SUPPORT5. Introduction to the chapterIn this chapter you will find the current and the previous version of the document you are reading. Also the web-page for your device is listed. Be sure to check it after a purchase for the latest available updates and examples.5.1 Document revision5.2 Hardware revisionRemember to check the schematics and the board design files to compare the differences.5.3 Useful web links and purchase codesThe web page you can visit for more info on your device ishttps:///Products/DSP/Emulators/TMS320-XDS100-V3/.ORDER CODES:TMS320-XDS100-V3 – completely assembled and tested JTAG emulatorHow to purchase?You can purchase directly from our online shop or from any of our distributors. Note that usually it might be faster and cheaper to purchase Olimex products from our distributors. List of confirmed Olimex LTD distributors and resellers: https:///Distributors.Please visit https:/// for more info.5.4 Product supportFor product support, hardware information and error reports mail to: ******************. All document or hardware feedback is welcome. Note that we are primarily a hardware company and our software support is limited. Please consider reading the paragraph below about the warranty of Olimex products.All goods are checked before they are sent out. In the unlikely event that goods are faulty, they must be returned, to OLIMEX at the address listed on your order invoice.OLIMEX will not accept goods that have clearly been used more than the amount needed to evaluate their functionality.If the goods are found to be in working condition, and the lack of functionality is a result of lack of knowledge on the customers part, no refund will be made, but the goods will be returned to the user at their expense.******************************************************************************* number before shipping back any merchandise. Please include your name, phone number and order number in your email request.Returns for any unaffected development board, programmer, tools, and cables permitted within 7 days from the date of receipt of merchandise. After such time, all sales are considered final. Returns of incorrect ordered items are allowed subject to a10%restocking fee.What is unaffected? If you hooked it to power, you affected it. To be clear, this includes items that have been soldered to,or have had their firmware changed.Because of the nature of the products we deal with (prototyping electronic tools) we cannot allow returns of items that have been programmed, powered up, or otherwise changed post shipment from our warehouse.All returned merchandise must be in its original mint and clean condition. Returns on damaged, scratched, programmed, burnt, or otherwise 'played with' merchandise will not be accepted.All returns must include all the factory accessories which come with the item. This includes any In-Circuit-Serial-Programming cables, anti-static packing, boxes, etc.With your return, enclose your PO#. Also include a brief letter of explanation of why the merchandise is being returned and state your request for either a refund or an exchange. Include the authorization number on this letter, and on the outside of the shipping box.Please note: It is your responsibility to ensure that returned goods reach us. Please use a reliable form of shipping. If we do not receive your package we will not be held liable. Shipping and handling charges are not refundable.We are not responsible for any shipping charges of merchandise being returned to us or returning working items to you.The full text might be found at https:///wiki/GTC#Warranty for future reference.。
仿真器使用说明
Hardware User’s Manual目錄1.硬體配件.2.可支援的MCU型號3.安裝步驟.4. 面板的使用說明.1.硬體配件:1.1 ICE 一台.1.2 writer board 一台.1.3 DC Adaptor 一台.1.4Printer port cable 一條.1.5 Bus line(40pin) 二條.1.6Bus line(16pin)一條.1.7 硬體安裝說明一份.2.可支援的MCU型號:本發展系統可以支援下列四位元的MCU 產品:TM8704,TM8705,TM8706,TM8712,TM8713,TM8740 (note 1),TM6811,TM6814,TM6820,TM6840,TM6841,TM8795,TM87P08(note 2).Note 1: 客戶如需開發TM8740的產品時,需配合TX9010 EV Board一起使用,請洽本公司之業務部門。
Note2: TM8795,TM87P08 是OTP的產品, 需配合Writer Board一起使用才可以做programming.3.安裝步驟:3.1 Step1:請確定電腦上的printer port 是設定在EPP Mode上。
3.2Step2:將printer port cable分別連接到電腦與ICE的printer port如Figure 1。
Figure 13.3 Step3:將ICE插上DC Adaptor如Figure 2.Figure 23.4Step4:將Power切至 ON.3.5硬體安裝完成.3.6接下來軟體安裝請上十速公司網站下載,依指示安裝軟體程式後即可使用。
4.面板的使用說明:Figure 3Figure 41.SW1,SW2,SW3SW1:設定Chip的工作電壓,設定方法請看Table 1.SW2:設定LCD BIAS,設定方法請看Table 2.SW3:設定LCD Pump voltage,設定方法請看Table 3.範例:如果客戶的 *.opt檔案中的設定為:工作電壓3v,1/4BIAS, SW1,SW2,SW3調法如 Figure 5.Figure 52.JP8,JP9:連接至外部測試板或LCD panel signal,請參考Figure 6.Figure 63.External clock外部接腳: Fast-R and Slow-R&C.(註1)3.1 範例:Fast-R接腳方式如Figure 7.Figure 73.2 範例:Slow-R&C接腳方式如Figure 8.Figure 84.RFC外部接腳: RR,RT,RH and CX.4.1範例:RR,RT,RH and CX接腳方式如Figure 9.Figure 95.Reset, INT按鍵 :5.1 Reset:chip reset request signal.5.2 INT:External interrupt request signal.5.3詳細的使用方法請參考各Chip user’s manual.6.LED Status Display:( Hi => 亮 ; Lo => 不亮 )VDDC :ICE POWER.(ON:Hi ; OFF:Lo)ECSF : Fast / Slow clock status.(Fast:Hi ; Slow:Lo)OU :STACK Over/Underflow status.(STACKOver/Underflow:Hi ; normal:Lo)HALT : HALT status.( HALT mode:Hi ; HALT release:Lo)STOP : STOP status.( STOP mode:Hi ; HALT release:Lo)STEP : Free run /Single step status.(Free run:Lo ; Single step:Hi) MATCH : Compare H/W(sw1,sw2,sw3) setup with S/W(.opt file) setup. (the same:Hi)TCK2,ICE,CONF :這三個LED status是工程驗證,所以客戶不需要理會.7.EXT-V,VDDC,GND :7.1 EXT-V:External VDDO接腳.(註2)7.2 VDDC:5 voltage.7.3 GND:接地點.8.DC-IN : 9V DC input.9.Printer port : connect PC.10.Power switch.11.JP7:TM8740外接板專用排線孔,請參考Figure 9.Figure 912.JP10: Writer PCB Board外接板專用排線孔,請參考Figure 10,Figure 11,Figure12. (註3)Figure 10:Writer Pcb Board V:1.0 and TICE87NBFigure 11: Writer Pcb Board V:2.0 and TICE87NBFigure12: Writer Pcb Board V:3.0 and TICE87NB13. Writer_Boare: 參考Figure13,Figure14. (註4)Figure 13: Writer Pcb Board V:2.0Figure14: Writer Pcb Board V:3.0Table1. POWER SETTINGSW1 of VDDO settintFunction Bit1 Bit2 Bit3 Bit4 Bit5 5v 1 0 0 0 0 3v 0 1 0 1 01.5v 0 0 1 1 0 EXT-V 0 0 0 0 1Table2. CUP0~CUP2 CAP SETTINGSW2 CAP of CUP0~CUP2 settingFunction Bit1 Bit2 Bit3 Bit4 DC 0 0 0 0 1/2 BIAS 0 0 1 1 1/3 BIAS 0 0 1 1 1/4 BIAS 1 1 1 1Table3. VDD1~VDD4 CAP SETTINGSW3 CAP of VDD1~VDD4 settingFunction Bit1 Bit2Bit3Bit4Bit5Bit6Bit7 Bit8DC 1 0 1 0 1 0 1 01.5V Ag 1/2 1 0 0 1 1 0 1 01.5V Ag 1/3 1 0 0 1 0 1 1 01.5V Ag 1/4 1 0 0 1 0 1 0 1 3V Li 1/2 0 1 1 0 1 0 1 0 3V Li 1/3 0 1 1 0 0 1 1 0 3V Li 1/4 0 1 1 0 0 1 0 1註: 1為 ON.0為 OFF.註1 : 在Debug mode(step, go)下,所有的clock都是由ICE內部提供, 所以External clock只有在執行Free run mode才會有效.註2: 需配合SW1調整為EXT-V才會有效.註3: WRITER BOARD 使用說明.a.將16 pin bus line 分別接到JP10(TICE87NB) 和JP1( WRITER PCB BOARD).b.將 JP2 上的信號分別連接到 TM8795,TM87P08IC,TM87P04(OTP).c.硬體完成.d.接下來由軟體控制.註4: Writer_Board 需要配合 TICE87NB 才可以燒錄.請注意下面條件:1. TM8795,TM87P08,TM87P04 POWER SOURCE只支持 3V.2. 在燒錄過程中週邊元件不要焊上去.3. programmed pin assignment: VDD(VDD2), VPP , INT,RESET, GND4. 燒錄成功後請將IC的VDD and VPP short.5. JP3不用理會(Irrelevant).。
ARMice使用手册
² 5V 输入,用来给 ARMice 和内部 standalone 系统供电,请注
意其输入电源为 5V。
² IDC20(male type)用来与您的目标板上的 JTAG 调试口相连
接。
² D4 为一个 LED 指示灯,闪烁时表示对 EmbeddedICE 有操作。 ² D5 为 ARMice 的电源指示灯。
Standalone 系统的信息。 ² 以太网口是由内部 Standalone 系统的以太网接口,它具有
10/100M 自适应的特性。 ² D2,D3 分别为以太网口在 100M 或 10M 情况下的活动指示。
ARMice 对 ARM 内核支持
目前 ARMice 和 Multi-ICE Server 配合可以支持以下 ARM 的内
Yes
Yes
Windows XP
Yes
Yes
Solaris 2.6, 7.0, or 8.0
No
Yes
HP-UX 10 or 11
No
Yes
Redhat Linux 6.2 or 7.1
No
Yes
所以如果用户的调试器运行在非 Windows 系统下,就必须有另外一台
Windows 主机运行 Multi-ICE Server。
ARMice 申请购买 BSP 源代码 ü 请向 ATI 购买 Nucleus 后向 ARMice 申请购买 BSP 源代码 ü 提供在 MS-Windows 下的 GDB debugger,可在 windows 下进行
源程序调试 Linux/uClinux 中的应用程序 (免费) ü 可以向 ARMice 申请购买 GDB server 源代码 ü 可以向 ARMice 申请购买 GDB debugger 源代码 ü 可以向 ARMice 申请购买 uClinux BSP 源代码 ü 可以向 ARMice 申请购买 uC/OS-II 源代码
ARM JTAG实时仿真器安装使用指南

ARM JTAG实时仿真器安装使用指南Version 1.02003. 2. 5目 录第一章 ARM JTAG介绍1.1 ARM JTAG产品介绍 3 1.2 ARM JTAG硬件介绍 4 1.2.1 ARM JTAG接口定义 4 1.2.2 ARM JTAG接口电平 4 1.2.3 TCK信号频率设置 5 1.2.4 目标板JTAG接口设计 5 1.2.5 RTCK时钟 5 1.2.6 14脚和20脚JTAG接口转换 5第二章 ARM开发系统安装2.1 硬件连接 7 2.2 软件安装 7第三章 ARM JTAG使用3.1 Multi-ICE Server使用 9 3.1.1 Multi-ICE Server菜单选项 9 3.1.2 Multi-ICE Server状态 11 3.1.3 Multi-ICE Server中的JTAG参数设置 14 3.1.4 Multi-ICE Server配置 16 3.2 调试系统架构体系 17 3.3 ADS V1.2与ARM JTAG连接 18 3.3.1 连接AXD 18 3.3.2 连接CodeWarrior 19第四章 最终应用程序烧写4.1 应用程序在ARM板上运行原理 21 4.2 生成Boot.bin 21 4.2.1 系统初始化 21 4.2.2 生成BIN文件 21 4.3 烧录Boot.bin 23附录1 TCK频率设置 24 附录2 常见问题 26第一章 ARM JTAG介绍1.1 ARM JTAG产品介绍ARM JTAG是用于ARM处理器内核软件调试的专用工具符合IEEE 1149.1规范与ARM原装Multi-ICE完全兼容它可以很好的与ADS V1.2集成开发环境相结合支持全线ARM处理器内核可以满足更多用户对ARM处理器内核软件的开发调试需求图1-1 ARM JTAGARM JTAG主要特征如下□ 支持所有内建embedded-ICE逻辑单元的ARM处理器□ 支持多个内核系统□ 连接简便兼容不同电压的目标系统□ 除JTAG扫描链外不占用目标板上的其它任何资源□ 支持实时硬件断点□ 用户可通过JTAG修改寄存器存储器内容□ 支持程序下载及实时调试□ 通信速度快最高可达10Mbpps□ JTAG速度可配置以满足不同调试对象的需求□ 支持所有符合RDI 1.50或RDI 1.51规范的调试工具软件□ 提供丰富的例程和使用说明□ 支持多种目标平台如ATMELSamSungIntelPhilipsSharpCirrus LogicTricend等□ 体积轻巧性能稳定ARM7TDMI ARM710T ARM7TDMI-SARM7DMI ARM720T ARM740TARM7TDI-S ARM7EJ-S ARM926EJ-SARM9TDMI ARM9E-S ARM940TARM946E-S ARM920T ARM966E-SARM1020E ARM922T ARM966E-SIntel XScale PXA210 PXA250 80200表1-1 ARM JTAG支持的ARM内核支持的操作系统有□ Windows 95/98/NT/2000/ME/XP□ X86 RedHat Linux 6.2/7.1/7.21.2 ARM JTAG硬件介绍1.2.1 ARM JTAG接口定义图1-2 20脚JTAG接口定义管脚编号信号输入/输出方向信号说明1 VrefInput 接口信号电平参考电压一般直接连接Vsupply2 VsupplyInput 电源3 nTRST Output 可选项JTAG复位在目标端应加适当的上拉电阻以防止误触发4 GND 接地5 TDI Output Test Data In6 GND 接地7 TMS Output Test Mode Select8 GND 接地9 TCK Output Test Clock10 GND 接地11 RTCK Input 可选项Return Test Clock由目标端反馈给仿真器的时钟信号用来同步TCK信号的产生不使用时直接接地12 GND 接地13 TDO Input Test Data Out from target to仿真器14 GND 接地15 nSRST Input/Output 可选项System Reset与目标板上的系统复位信号相连可以直接对目标系统复位同时可以检测目标系统的复位情况为了防止误触发应在目标端加上适当的上拉电阻16 GND 接地17 NC 系统保留18 GND 接地19 NC 系统保留20 GND 接地表1-2 20脚JTAG接口说明1.2.2 ARM JTAG接口电平仿真器推荐的正常使用电压为2.5 – 5.0V最大不超过2.0 – 5.5V随着电源电压的变化接口的逻辑高电平和判决门限电平都将随之变化这使得仿真器能够与不同电压和目标系统在逻辑上兼容1.2.3 TCK信号频率设置为了与不同速率的目标对象相兼容JTAG口的通信速率应调整到一个合适的水平数据传输速率是由TCK信号的频率来决定的TCK信号的真实频率跟设置值之间的对应关系参见附录11.2.4 目标板JTAG接口设计目标板使用与仿真器一样的20脚针座RTCK和nTRST这两个信号根据目标RSIC是否提供对应的引脚来选用nSRST则根据目标系统的设计考虑来选择使用在目标系统的PCB设计中最好把JTAG接口放置的离目标RISC近一些如果这两者之间的连线过长会影响JTAG口的通信速率另外电源的连线也需要加以额外考虑因为仿真器要从目标板上吸取超过100mA的大电流1.2.5 RTCK时钟RTCK信号用来同步仿真器和目标板之间的通信而不用关心TCK信号的具体频率在没有收到目标系统的反馈时钟信号之前仿真器不会触发一个新的TCK如果不使用RTCK功能这个信号脚可以简单的接地处理如果使用了RTCK功能把这个脚直接连向ASIC中对应的管脚如果激活了RTCK功能但RISC并没有提供对应原管脚可以把RTCK和TCK这两个信号连在一起但在连线中最好遵循下面的原则这一点在边线比较长的时候尤其重要目的是确保在TCK时钟到达目标点的时候才产生反馈信号图1-4 RTCK连接图1.2.6 14脚和20脚JTAG接口转换有些系统采用一种14脚的JTAG插座这两类接口的信号排列如下图1-5 不同的JTAG接口这两类接口之间的信号电气特性一样因此可以把对应的信号直接相连进行转换第二章 ARM开发系统安装ARM JTAG物品清单□ ARM JTAG硬件实时仿真器□ 20针标准ARM JTAG接口扁平连接线缆一条□ 并口连接线缆一条□ 直流5V稳压电源一个□ ARM开发系统安装光盘及使用手册一套2.1 硬件连接ARM JTAG使用标准的25芯并口插座和20针的JTAG插座作为接口与PC的连接线缆使用标准的25芯并口连接线缆与目标板的连接线缆使用20芯的IDC宽带线缆有的目标板可能使用14脚的JTAG插座信号定义和JTAG接口的转换方法请参见1.2.6节内容图2-1 硬件连接示意图2.2 软件安装开发PC主机系统需求□ Pentium IBM兼容PC带有可用的并口和串口□ 200MHz以上CPU□ 32MBFor Win98或64MBFor Win2000以上内存空间□ 300MB以上空闲硬盘空间□ CD-ROM驱动器□ 建议使用Microsoft Windows 98或2000操作系统ARM开发系统安装步骤如下1 把ARM开发系统软件光盘插入CD-ROM系统自动运行进入如图2-2画面如若未出现此画面请手动运行光盘根目录下autorun.exe文件图2-2 ARM集成开发环境主界面2 单击上述画面进入ARM开发系统程序安装选择主界面在程序安装选择主界面中按顺序依次点击需要安装的程序系统会自动进行安装安装程序说明□ ARM JTAG Emulator 安装ARM JTAG驱动程序□ ARM Developer Suite 安装ADS V1.2集成开发环境□ ARM Update 运行注册程序注意在运行注册程序之前请确认已正确安装了ARM JTAG驱动程序和ADS V1.2集成开发环境图2-3 ARM开发系统程序安装选择界面3 程序全部安装完毕后点击EXIT退出第三章 ARM JTAG使用在使用ARM JTAG进行系统开发之前请先确定系统硬件连接正确并已连接好电源和软件安装正确3.1 Multi-ICE Server使用Multi-ICE是ARM JTAG的配置程序通过它可以使ARM JTAG与目标板建立通讯连接并能够反馈目标板上ARM处理器的硬件信息在PC开发主机上选择开始>程序>ARM Multi-ICE v2.2>Multi-ICE Server进入Multi-ICE Server主界面图3-1 Multi-ICE Server主界面3.1.1 Multi-ICE Server菜单选项这里介绍一下Multi-ICE程序中各个菜单及里面的每个选项1 工具栏在工具栏里总共有四个功能按钮图3-2 工具栏按钮2 File菜单□ Load Configuration 读取用户指定的配置文件对仿真器进行手动配置□ Auto-Configure 自动检测和配置目标系统□ Auto-Configure at 20KHz 自动检测和配置目标系统并且设置TCK信号的频率为20KHz □ Reset Target 对目标系统复位有效的复位信号在Setting/JTAG settings菜单或配置文件中设置□ Log 输出信息存储到指定的日志文件中□ Set Log File 用于指定日志文件的路径和名字□ Recent File List 显示最近调用过的配置文件路径□ Exit 退出程序图3-3 File菜单3 View菜单这个菜单用于控制Multi-ICE程序界面外观和显示信息□ Toolbar 关闭或打开工具栏□ Status Bar 关闭或打开状态栏□ RPC Calls 允许或屏蔽RPC信息在调试信息窗口中显示□ Clear Debug Window 清空调试信息窗口中的显示信息图3-4 View菜单4 Run Control菜单图3-5 Run Control菜单这个菜单中的选项控制各个处理器的运行和停止□ Independent 使每个目标系统直接相互独立不进行交互通信缺省状态有效□ All Run 启动所有的目标系统□ All Run/Stop 当收到一条启动指令时启动所有的目标系统当任何一个目标系统停止时其它的系统也一起停止□ Custom 执行用户自定义的设置□ Set-up Custom 打开用户自定义设置窗口设置各个目标系统之间的交互方式□ Load Settings 读取以前保存下来的设置文件□ Save Settings 把当前设置保存到文件5 Connection菜单这个菜单在调试程序和Server建立连接之后才有效它会给每一个TAP控制器分配一个菜单项为用户提供单独删除某个TAP控制器的选项图3-6 Connection菜单6 Settings菜单这个菜单用来设置各种接口信息□ Port Settings 显示并口设置对话框用来选择并口的地址和是否使用4-bit通信模式同时显示当前的并口类型设置在PC机的BIOS中要把并口模式选择为EPP□ User Output Bits 当然版本的Server程序保留使用□ JTAG Settings 显示JTAG口的设置对话框用来设置JTAG口相关的时序信息和复位行为如果调用了配置文件则相应的设置会在窗口中反映出来□ Start-up Options 显示设置启动选项的对话框图3-6 Settings菜单7 Help菜单□ Help Topics 启动Multi-ICE的帮助系统□ About Multi-ICE Server 显示软件版本信息图3-7 Help菜单3.1.2 Multi-ICE Server状态在Multi-ICE Server的TAP信息显示区可以直观的显示当前系统状态下面通过单内核目标系统为例进行说明1 配置后的状态Multi-ICE Server进行配置之后显示状态如图3-8所示通过自动检测显示目标是一个ARM7TDMI的单内核系统在TAP配置显示区用图形的方式直观的显示出了检测结果内核的类型名称ARM7TDMI显示为绿色并且前面有一个表示内核状态的字母这里字母X表示Multi-ICE Server目前还没有连接到任何调试程序中双击图3-8中的处理器类型名字会弹出目标处理器附加信息窗口图3-8 Multi-ICE Server配置后状态图3-9 目标处理器附加信息窗口注意处理器类型名称前面的字母叫做状态位共有四种状态□ [S] 处理器处于暂停状态□ [R] 处理器忙运行状态□ [D] 处理器处于下载状态□ [X] 处理器类型未知或没有被调用2 连接后的状态如果有调试程序通过MultiICE.dll与Multi-ICE建立了连接则Multi-ICE的状态变成如图3-10所示此时处理器前面的状态字母变为S表明已建立连接但正处于空闲状态处理器名字变为红色同时信息窗口中的信息增加了相应的内容图3-10 Multi-ICE Server连接后的状态3 激活后的状态Multi-ICE的活动状态有下载和运行两种图3-11是代码下载时候的状态当下载操作完成后状态字母又马上变回X图3-12是代码运行中的状态当停止运行后状态字母会变回S图3-11 Multi-ICE Server代码下载时的状态图3-12 Multi-ICE Server代码运行中的状态3.1.3 Multi-ICE Server中的JTAG参数设置1 并口设置并口设置菜单位于Settings>Port Settings图3-13 并口设置□ Port Address 选择使用的并口地址有三个可选项• AUTO 自动选择系统默认选项• LPT1 选择LPT1• LPT2 选择LPT2□ Force 4-bit access 使用4-bit的数据传输方式□ Current port Mode 显示并口类型显示BIOS中并口设置状态为只读选项注意并口类型是在PC的BIOS中进行设置的通常提供四种类型□ Basic type部分BIOS提供值为Default或SPP等□ EPP□ ECP□ EPP + ECP由于ARM JTAG使用双向的并口数据总线通常ECP或EPP类型能够符合要求但在一些比较新的BIOS版本中可能要选用基本类型而不是ECP或其它增强型由于历史上的原因并口规范和IEEE1283协议的执行存在弹性所以不同计算机主板厂商在并口设计上存在一些差异当第一次使用ARM JTAG时需要对并口类型设置多作几次试验目前我们推荐用户选择EPP类型2 时钟设置时钟设置菜单位于Settings>JTAG settings图3-14 ARM JTAG时钟设置□ JTAG Bit Transfer Timing 设置TCK信号频率如果需要手动设置请参见附录1□ Behavior 选择使用RTCK功能□ Reset Behavior 选择哪组信号在按下复位按钮后有效3 启动选项设置启动选项设置菜单位于Settings>Start-up Options这部分用来设定Multi-ICE启动时的参数和选项□ Network Settings 提供两个选项• Allow Network Connections 使用网络连接功能启动时自动检测网络设置情况• Start Portmap Service 仅在上一项选中时有效□ Start-up Configuration 设置Multi-ICE Server程序启动后自动执行的操作图3-15 Multi-ICE启动选项设置3.1.4 Multi-ICE Server配置Multi-ICE Server在运行时需要目标处理器的配置信息比如内核类型和IR指令寄存器长度等等对Multi-ICE Server进行配置有自动配置和手动配置两种方式1 自动配置在Multi-ICE Server程序中选择File>Auto-configure菜单或者工具栏上的自动配置按钮如果目标处理器是ARM族的内核ARM JTAG能够自动检测到并进行相应配置并把结果显示在Multi-ICE Server的显示窗口中注意有时候检测ARM710T/720T/740T/940T这一系列内核时会返回一个UNKNOWN结果这是ARM 报告的一个硬件bug这时候就只能使用手动配置的方法经过自动配置后JTAG的通信速率会自动设置为10MHz用户可以在Settings>JTAG Settings 菜单中按自己的要求选择合适的速率2 手动配置手动配置是通过调用一个用户预先定义好的配置文件来完成对Multi-ICE Server的配置配置文件可以从File>Load configuration菜单中调入配置文件为文本格式文件文件后缀名为.cfg配置文件主要包括以下几个部分□ Title□ TAP controller□ Devices attached to each controller□ JTAG timing information□ Other options下面是配置文件的格式示范[TITLE]Double cores configuration demo 给配置方案命名[TAP0] 目标系统中包含TAP0控制器ARM7TDMI TAP0控制上连着一个ARM7TDMI核[TAP1] 目标系统中包含TAP1控制器ARM7TDMI-S TAP1上连着一个ARM7TDMI-S核如果有更多的TAP控制器和内核依次往下增加[Timing] JTAG口的时序设置High = 9 TCK信号的高电平时间Low = 9 TCK信号的低电平时间Adaptive = ON RTCK功能开关ON或OFF[TAPINFO]YES[Reset]nTRST通常情况下目标系统只有单内核仅使用 [TAP0] 就可以了对那些自动配置不能识别的内核需要在配置文件中指定好正确的内核类型然后在Multi-ICE Server中调入对应的配置文件就可以了TAPINFO选项主要是为RISC开发人员测试芯片时提供的当该选项打开时ARM JTAG完成正常的配置工作后会继续从目标RISC中读取内核的其它信息供设计人员分析这些附加信息可以从双击Multi-ICE Server的TAP显示窗口中的TAP控制器图标而弹出的信息窗口中得到使用自动配置时TAPINFO是一直打开的当调用用户自定义的配置文件时TAPINFO的默认状态时关闭Reset选项用来定义ARM JTAG的复位动作当用户按下Multi-ICE Server工具栏上的复位按钮时Reset选项内定义的信号就有效合法的选项包括nTRST或nSRST或者两者都选中Timing部分定义了JTAG端口的时序信息关于TCK时钟参数的设置请参见附录1在一个配置文件中只有TAP控制器和内核类型的定义是必需的其它部分都是可选项另外文件中用户的注释语句以分号开头3.2 调试系统架构体系整个调试系统包括集成调试环境和硬件仿真器它们组成了一个类似于客户服务器模型的系统服务器端把所有硬件封装起来给客户端只提供了一个虚拟的处理器接口客户端的调试工具软件通过一个动态链接库与服务器相连所以服务器一侧的硬件和客户端的调试工具软件是相互独立的在同一个动态链接库的基础上双方可以各自动行升级或替换同样也方便了用户选择不同的仿真器和调试软件来组合自己的调试平台一个具体的调试程序应该能够支持许多不同的链接库不同的链接库提供了不同的功能调用以ADS工具包为例ARMulate.dll提供了一个软ARM内核用作程序的逻辑验证若要把Multi-ICE Server程序连接在一起进行实时仿真则只要调入MultiICE.dll就可以了该动态库文件在Multi-ICE Server的安装目录下可以找到图3-16 调试系统架构3.3 ADS V1.2与ARM JTAG连接当Multi-ICE Server程序与目标板建立正确的连接之后下面要把调试软件连接进来组成完整的调试平台下面以ADS V1.2为例说明连接过程3.3.1 连接AXD在AXD的Options>Configure Target菜单中调入MultiICE.dll文件并完成目标处理器的设置只需在第一次使用之前进行设置图3-17 AXD的Options菜单图3-18 调入MultiICE.dll如图3-18所示如果第一次使用点击右边的Add按钮在Multi-ICE Server的安装目录下找到MultiICE.dll文件并添加到Target Environments中点击右边的Configure按钮弹出如图3-19所示的设置窗口并在Select a new processor中选择对应的处理器图3-19 目标处理器窗口3.3.2 连接CodeWarrior在CodeWarrior中打开或新建立一个工程点击Edit>DebugRel Setting菜单在CodeWarrior中进行设置图3-20 CodeWarrior的Edit菜单图3-21 DebugRel Settings窗口在这里注意一下图3-21中右边的RO Base和RW Base输入框它们分别为代码区和变量区的起始地址这些设置要与具体的目标系统中使用的存储器地址相对应第四章 最终应用程序烧写ARM开发板文档中介绍的应用程序都是执行在板卡的SDRAM中而用户开发的最终产品是必须要脱离ARM JTAG执行的本章介绍的是最终应用程序的烧写方法本章下面按步骤讲述如何使用Flash程序向板上烧录Boot程序4.1 应用程序在ARM板上运行原理要想在ARM板上正确的烧录应用程序必须了解应用程序在ARM上运行的原理首先板卡复位之后所有地址指针都被初始化为0系统指针自动指向0x0地址此时 SDRAM由于未被定义所以对于系统是不可见的即用户无法对SDRAM进行访问然后系统从0x0地址存放的用户应用程序开始执行用户程序内必须包含系统寄存器初始化代码并对外部SDRAM进行配置使系统可以进行访问此初始化代码一般用汇编语言编写最后系统把FLASH存储器中保存的用户程序复制到SDRAM的指定地址中复制完成后程序自动跳转到SDRAM的应用程序中全速运行4.2 生成Boot.bin4.2.1 系统初始化由于系统启动时从地址0x0开始执行所以程序boot必须装载在从地址0x0开始的Flash存储器中在Boot的初始化程序Boot.s中可以看到类似下面的语句ldr r0=COPY_START pointer to ROM codeldr r1=COPY_END end of ROM codeldr r2=_RAM_STARTADDRESS start of RAMldr PC=_RAM_STARTADDRESS jump to RAMB .这一小段程序指明了在Flash在存储器中存放应用程序的起始地址结束地址以及复制到SDRAM中的起始地址当复制完成后程序转入_RAM_STARTADDRESS入口开始全速运行在Boot程序的头文件中包含以下定义_RAM_STARTADDRESS EQU 0x8000 需根据用户板SDRAM地址配置修改BUSWIDTH SETA 32 需根据用户实际情况修改16或32COPY_START EQU 0x0COPY_END EQU 0x5000 需根据用户程序长度修改从以上定义可以看出在Flash存储器中存放的应用程序从地址0x0开始到0x5000结束复制到SDRAM的起始地址是0x8000当程序复制完成后程序转到0x8000地址开始执行4.2.2 生成BIN文件在生成BIN文件之前请先确认应用程序在DEBUG模式下运行正确1 在CodeWarrior中对当前的工程Boot.mcp进行设置进入Edit>DebugRel Settings菜单在Target Settings选项中的Post-Linker设置为ARM formELF在ARM Linker选项的Equivalent Command Line中写为-info totals –entry 0x0 –ro-base 0x0 –rw-base 0x5000图4-1 CodeWarrior中的DebugRel Settings设置2 对Boot.mcp进行Make生成Boot.bin文件此时需要烧录的Boot.bin文件已经生成可以进行烧录了4.3 烧录Boot.bin对烧录Boot.bin文件需要用户编写一个Flash程序进行具体烧录工作在Flash程序中仍然需要对系统进行初始化的代码一般根据不同的用户硬件板不同的Flash芯片对Flash存储器的操作方法也不同因此Flash程序也有所不同相关内容请查看硬件板使用手册和Flash芯片手册如果Flash程序调试正确就可以全速运行了如果在Flash程序内部调用了Boot.bin文件则Flash程序运行完毕后Boot.bin文件就烧录完毕了此时对硬件板进行复位Boot程序就开始在板上自动运行了附录1 TCK频率设置在Multi-ICE Server设置中TCK不是直接使用频率值来进行设置而是使用了一组整数它们之间的对应关系参见表附1-1用户只需要找到需要的频率把对应的设置数值填入设置窗口或是配置文件中即可TCK时钟信号的波形不一定要方波可以高低电平设置分别不同的值但是推荐用户使用方波波形特别是不要设置占空比太大的波形从表附1-1中可以看出频率值与对应的周期值不正好是倒数关系当高低电平的周期都是该设置值时对应的频率值才是信号频率若高低电平采用不同设置通常情况下没有必要则需要从表附1-1 中找出各自对应的周期值相加就是信号的周期再从周期算得频率频率kHz 周期ns数值频率kHz周期ns数值频率kHz周期ns数值10000 50 0 138.89 3600 81 18.38 27200 176 5000 100 1 131.58 3800 82 17.36 28800 177 3333.33 150 2 125 4000 83 16.45 30400 178 2500 200 3 119.05 4200 84 15.63 32000 179 2000 250 4 113.64 4400 85 14.88 33600 180 1666.67 300 5 108.7 4600 86 14.2 35200 181 1428.57 350 6 104.17 4800 87 13.59 36800 182 1250 400 7 100 5000 88 13.02 38400 183 1111.11 450 8 96.15 5200 89 12.5 40000 184 1000 500 9 92.59 5400 90 12.02 41600 185 909.9 550 10 89.29 5600 91 11.57 43200 186 833.33 600 11 86.21 5800 92 11.16 44800 187 769.23 650 12 83.33 6000 93 10.78 46400 188 714.29 700 13 80.65 6200 94 10.42 48000 189 666.67 750 14 78.13 6400 95 10.08 49600 190 625 800 15 73.53 6800 112 9.77 51200 191 588.24 850 16 69.44 7200 113 9.19 54400 208 555.56 900 17 65.79 7600 114 8.68 57600 209 526.32 950 18 62.5 8000 115 8.22 60800 210 500 1000 19 59.52 8400 116 7.44 67200 212 476.19 1050 20 56.82 8800 117 7.1 70400 213 454.55 1100 21 54.53 9200 118 6.79 73600 214 434.78 1150 22 52.08 9600 119 6.51 76800 215 416.67 1200 23 50 10000 120 6.25 80000 216 400 1250 24 40.08 10400 121 6.01 83200 217 384.62 1300 25 46.3 10800 122 5.79 86400 218 370.37 1350 26 44.64 11200 123 5.58 89600 219 357.14 1400 27 43.1 11600 124 5.39 92800 220 344.83 1450 28 41.67 12000 125 5.21 96000 221 333.33 1500 29 40.32 12400 126 5.04 99200 222 322.58 1550 30 39.06 12800 127 4.88 102400 223 312.5 1600 31 36.76 13600 144 4.6 108800 240294.12 1700 48 34.72 14400 145 4.34 115200 241 277.78 1800 49 32.89 15200 146 4.11 121600 242 263.16 1900 50 31.25 16000 147 3.91 128000 243 250 2000 51 29.76 16800 148 3.72 134400 244 238.1 2100 52 28.41 17600 149 3.55 140800 245 227.27 2200 53 27.17 18400 150 3.4 147200 246 217.39 2300 54 26.04 19200 151 3.26 153600 247 208.33 2400 55 25 20000 152 3.13 160000 248 200 2500 56 24.04 20800 153 3 164400 249 192.31 2600 57 23.15 21600 154 2.89 172800 250 185.19 2700 58 22.32 22400 155 2.79 179200 251 178.57 2800 59 21.55 23200 156 2.69 185600 252 172.41 2900 60 20.83 24000 157 2.6 192000 253 166.67 3000 61 20.16 24800 158 2.52 198400 254 147.06 3400 80 19.53 25600 159 2.44 204800 255表附1-1 TCK频率设置对应表附录2 常见问题随着当前系统设计复杂度的提升调试过程中碰到问题的几率大大增加在各种问题中我们需要分析问题的根源和实质以便去正确的解决ARM JTAG与目标板的连接仅限于JTAG接口两者之间的耦合度已降到最小不会对目标板的逻辑和电气性能产生影响对于一些刚开始使用ARM JTAG的客户我们总结了一些常见问题提供给用户希望能够有所帮助问题 Multi-ICE Server程序启动失败原因 BIOS中的并口类型设置不正确请修改后重试一般推荐用户选择EPP类型问题 Multi-ICE Server程序启动失败出现TCP/CP堆栈出错原因 开发PC机没有连接网络或没有安装网络服务程序如果不需要使用网络服务功能可以在Multi-ICE Server的Settings>Start-up Optinos菜单中关闭该功能如果程序因为该原因自动关闭而造成无法修改选项设置可以在Multi-ICE Server的安装目录下找到一个名为的文件并双击运行则在以后的Multi-ICE Server程序运行中就会跳过网络协议堆栈的检测问题 Multi-ICE Server程序自动识别目标失败原因 1 目标内核不能识别在本手册前面章节中详细列出了目前版本的ARM JTAG所支持的内核种类如果能够检测到正确的TAP控制器并建立起通信但不能返回内核ID号将在屏幕上显示UNKNOWN这时调试程序不能正常工作用户需要从厂家得知正确的ARM芯片内核类型并新建一个配置文件来进行手动配置配置方法参见第3.1.4小节内容2 信号问题最常遇到的信号问题包括□ Reset信号没有上拉电阻Reset包括nTRST和nSRST这两个信号应在目标板上用小于10K的电阻上拉□ TCK信号的频率太高该频率受制于TAP控制器目标板布线和连接电缆等因素有些TAP 控制器只支持到1MHz速率这时候需要调整TCK频率设置问题 同调试程序连接时提示Can’t stop processor原因 1 在当前环境下JTAG的时钟频率过高请尝试降低TCK的频率2 如果Multi-ICE Server程序是手动配置的则需要检查□ 配置错误处理器类型连接次序等设置错误□ JTAG问题进行手动配置时因先确保在自动时能够检测到UNKNOWN这样说明JTAG接口通信正确3 ARM芯片接口的DBGEN信号被不正确的拉低如果该信号有片外接口请检查4 目标处理器的时钟不正确问题 同调试程序连接时出现Data Abort提示原因 1 当调试程序启动时处理器将停在当前PC值指向的地方同时读取该PC值周围一部分地址的存储器值如果这些地址正好没有被使用或指向空就会出现上述提示此情况属于正常范围2 果使用了存储器RAM或ROM出现这种问题表明在存储器访问上可能存在数据错误请检查存储器3 当用户下载程序到目标板时下载的目标地址是在编译器中指定的如果编译器里设置的目标地址与目标板上可写存储器的物理地址不能对应也会出现上述提示因为调试程序试图往错误的物理地址写入用户程序而出错这时需要检查并重新设置编译器选项4JTAG的时钟速率过快问题 在调试过程中经常停止有时候甚至进不了调试程序原因 在排除了调试程序本身的问题后这一类带有随机性的问题可以考虑是硬件时序或逻辑问题引起的最主要的可能性是nTRST和系统Reset信号不可靠Reset信号的不可靠包含两方面正常工作时要求稳定的保持高电平复位状态时要求有足够时间的低电平Reset电路因为简单通常会被忽略但事实表明很多貌似奇怪的问题最后都归结在这里无论是从调试的角度还是最后稳定工作的要求我们都建议用户采用一个好的Reset电路或是IC来代替简单的RC电路问题 调试程序出现Hardware interface timeout提示原因 1 目标板与ARM JTAG的连接断开或ARM JTAG与PC之间的连接中断2 ARM JTAG供电中断或供电不足3 ARM JTAG与目标板的通信停顿一般都是因为打开了RTCK选项但是检测不到合适的RTCK信号此时用户可以不使用RTCK功能或检查该信号的布线问题 序提示Unable to set breakpoints on exception vecors原因 射表中的起始地址对应的存储器类型是ROMARM JTAG不能在ROM上设置断点。
ARM说明书
作品设计说明书烟台职业学院电子工程系设计者:邸平柱指导教师:王强作品设计摘要:本设计作品主要通过和按键空追,输出到STM32F207为芯片,采用按键模块,实现控制led数码管的显示的控制和led的控制,从而达到我们想要的效果,通过液晶屏显示我们要显示的字。
熟悉了EITP 平台的使用。
了解I2C总线的配置和工作原理、CH452芯片的工作原理并能操作数码管和按键、FSMC总线的配置方式和工作原理和掌握液晶显示器的使用方法。
关键字:STM32F207;液晶显示屏;按键;数码管;LED灯;电机。
作品设计 (2)一、项目背景 (1)概述 (1)2、作品简介 (1)二、方案设计 (1)1、总体设计方案 (1)2、系统模块设计方案 (2)2.1 主控模块: (2)和按键模块: (2)显示模块 (3)步进电机模块 (4)、系统总体结构 (4)三、原理阐述与分析 (5)1、系统主程序分析 (5)2、功能分析 (6)电源模块电路图 (6)2.2 LED电路原理图 (7)继电器模块图 (7)蜂鸣器模块图 (8)数码管电路控制原理图 (8)键盘电路原理 (9)步进电机驱动原理图 (9)2.8 复位电路原理图 (10)四、运行与测试 (10)1.硬件相关设置 (10)2.操作步骤 (10)五、常见故障排除 (11)1、常见故障排除 (11)2、常见故障排除 (11)3、常见故障排除 (11)4、常见故障排除 (11)5、常见故障排除 (11)六、总结 (11)七、参考文献 (12)八、附录 (12)附录一:系统框图 (12)附录二:C8051F020处理器内部结构 (13)一、项目背景概述1.熟悉EITp平台的使用2.了解I2C总线的配置和工作原理3.了解CH452芯片的工作原理并能操作数码管和按键4.掌握LCD液晶的显示原理5.掌握GBK字库操作方法6.掌握SD卡以及文件系统操作方法2、作品简介本作品主要是通过按键控制数码管的显示,LED灯的亮灭和蜂鸣器的工作,通过液晶显示屏显示我们要显示的文字.二、方案设计1、总体设计方案系统主要由主控板、按键、led、蜂鸣器、液晶显示显示五大部分组成。
普中ARM仿真器使用说明书
普中ARM仿真器下载操作说明本文这里用的是MDK Keil4。
74版本,如果在硬件仿真设置中找不到CMSIS—DAP 请更换版本,版本过低的KEIL不会显示CMSIS-DAP-Debugger。
注意:ARM 仿真器在WIN10 上当仿真器插到电脑上时,随电脑开机重启使用之前要把USB 拔了重插才能识别步骤:打开一个能够正常编译通过的工程1、进入KEIL硬件仿真设置2、设置好硬件仿真后我们点Settings进入更深入的设置,请按照我这个面板这样设置。
(PS:这里我们也可以选择SW模式,把SWJ勾上Port选择SW就是SW模式了)3、设置好debug页面。
我们点击Flash Download进入下载设置把Rese and Run勾上4、点击add我们就来到了这一个页面,找到STM32F10x High-density Flash 512k 选中点add 添加就回到第4步页面,有显示STM32F10x High-density 512k 点ok完成设置.6、完成以上设置后我们点Utilities页面,这里也选择CMSIS-DAP选择好之后我们点ok完成设置(ps:如果这个界面没有Use Target for flash Programming选择CMSIS—DAP就忽略这一项)7、(keil下载)设置好之后我们编译程序没问题我们点Download进行下载提示Verify OK 就说明已经下载成功了8、(在线仿真调试)我们可以直接在keil里面调试程序,点工具栏的start debug 开始调试,如果退出也是点这个按钮点击之后我们就来到了这个页面,RST是复位的意思、第二个是全速运行、第三个是停止运行,再过来就是我们程序检查程序中错误的时候会用到的功能的,第一个箭头是单步运行、第二个和第一个功能差不多,第三个是跳出这个函数,第四个是进入函数内部.这四个功能大家可以自己运行体验一下效果就能理解是什么意思了.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
techor ICE™ ARM仿真器用户手册(Version 2.0)深圳技创科技有限公司TECHNIQUE INNOVATOR INC.-© 2003,2004 -第一章概述 (3)1.1 系统配置要求 (3)1.2 设备连接 (4)1.3 电源的使用 (4)1.4 techor ICE™的优点 (4)1.5 内核支持 (5)第二章JTAG口介绍 (6)2.1 接口连接 (6)2.2 接口电平 (7)2.3 TCK信号频率设置 (8)2.4 目标系统设计指南 (9)2.5 RTCK时钟 (10)2.6 JTAG连接转换座 (10)第三章techorICE™介绍 (12)3.1 系统功能层次划分 (12)3.2 软件架构 (12)3.3 远程调试功能 (13)3.4 Server配置 (14)3.4.1自动配置 (14)3.4.2手动配置 (14)3.4.3 IR长度文件 (15)3.4.4配置过程 (16)3.5 多内核目标系统 (16)3.6 系统组成结构 (18)第四章Server program使用指南 (20)4.1 启动Server program (20)4.2Server program菜单介绍 (21)4.2.1工具栏 (21)4.2.2文件菜单 (22)4.2.3视图菜单 (22)4.2.4控制菜单 (23)4.2.5连接菜单 (24)4.2.6设置菜单 (24)4.3Server状态指示 (24)4.3.1配置后的状态 (25)4.3.2连接后的状态 (26)4.3.3激活时的状态 (27)4.4并口设置 (28)4.5时钟设置 (28)4.6运行控制 (29)4.6.1指定各个设备之间的交互方式 (29)4.6.2设置轮询频率 (31)4.7启动选项设置 (32)附录一 TCK频率与设置值转换表 (34)附录二TCK设置值与频率转换表 (37)附录三常见问题 (40)第一章概述本章简单介绍techor ICE™ ARM仿真器的一些基本概念。
系统配置要求设备连接电源的使用techor ICE™的优点内核支持1.1 系统配置要求支持的主机端操作系统:z Windows 95z Windows 98z Windows NTz Windows MEz Windows 2000z Windows XPPC硬件要求:z奔腾233MHz以上CPUz64MB以上内存z200MB以上的硬盘空间z并行端口注意:并口需要在计算机的CMOS中设置好正确的类型后才能正常工作,关于并口设置的相关说明可以参见4.4。
如果使用远程调试功能,计算机还需配置:网卡和相应的驱动程序TCP/IP协议1.2 设备连接图1-1 techor ICE™外观techor ICE™使用标准的25针并口插座与PC机的LPT口相连,到目标板的JTAG接口采用20针IDC宽带线(BT224型)插座。
有的目标板可能使用ARM旧标准的14针JTAG插座,则中间需要一个转换座,2.6专门介绍转换座的使用。
1.3 电源的使用techorICE™采用专用的5V(内正外负)500mA稳压电源供电,这样做的好处是能最大限度地降低目标板与techorICE™之间的相互干预。
JTAG接口数字信号的逻辑电平会随着目标板电源电压的变化而改变。
techorICE™在工作时的一般功耗在0.7W左右。
最大电流不超过300mA。
为了防止异常的电源波动,V2.0版本的techorICE仿真器内部设计了相应的保护电路。
1.4 techor ICE™的优点国内首创的高档内电路:采用高档FPGA+MCU+CPLD方式,逻辑元件与微控器协同工作,故能达到极高的下载速度(120KBytes~200KBytes)和单步执行能力(每秒钟可以单步80次)无限次的Firmware升级能力,通过刷新Firmware(Firmware程序提供免费下载)可以支持ARM的未来核心开放的接口,支持多内核系统,允许调试非ARM核心及DSP核心连接简便,兼容大范围使用电压的目标设备(可以支持低至1.2V的核心电压并在1.2V 到5V间自动适应)除JTAG扫描链以外,不占用目标板上的其他任何资源可编程的JTAG位传送速率(可以设置为5KHz~10MHz),以满足不同调试对象的要求完整实现ARM RDI 1.5和RDI 1.51标准,与ARM Multi-ICE™兼容,支持ARM SDT/ADS/RDS及其他遵从RDI接口标准的调试器,techorICE 支持集成开发调试环境有:9ARM SDT, ADS,RDS9EPI EDB9Green Hills MULTI-20009Intel XScale software toolkit9Mentor Graphics XRAY debugger9IAR EWARM9WinCE Platform Builder9特别支持GNU GDB Debugger调试嵌入式Linux(MontaVista/BlueCat/eCos/中科红旗嵌入式Linux/uClinux/SnapGear)采用ARM集成开发调试环境和techorICE™的配置,支持源代码级调试,ARM THUMB 指令混合编译,支持C、C++、汇编语言的交叉调用,支持ROM断点,多个RAM断点,条件断点,单步执行,随程序同步更新并可即时修改变量、寄存器、内存值。
最多可以支持2个硬件断点,硬件断点可以设置成断点(breakpoint)或者观测点(watchpoint)高速通信的调试功能,高达12Mbps,方便快速下载目标程序和调试程序;支持Flash 在线快速烧写功能(通过自编的脚本文件),可省去通用编程器烧写Flash的麻烦 techorICE™使用标准的25芯并口插座和20针的JTAG插座作为接口,并且提供 14针JTAG转20针JTAG的转换座;特设外部稳压电源供电,正常电压范围4.5V到 5.5V 采用JTAG口的菊花链级联方式,支持同一ASIC内多个不同类型的ARM核techorICE™支持所有ARM内核( ARM7,ARM9,ARM10 )和XScale内核的处理器,包括:Samsung、ATEMEL、Intel、Cirrus Logic、Sharp、Philips、OKI、Motorola、Infineon、NEC、Qualcomm、LSI Logic、Altera、Linkup、Hynix、Winbond、Triscend、Marvell、ZTEIC ZCP320A等等具有ARM内核的通用微处理器和ASIC等 支持多种操作系统:Windows95/98/NT/ME/2000/XP及Linux对ARM有丰富应用经验的工程师提供全方位的技术支持和软硬件参考设计,资深ARM系统设计师与您交流,使您事半功倍!体积轻巧,性能稳定1.5 内核支持当前版本(version 2.0)的techorICE™支持如下所有版本的ARM内核:ARM7全系列:ARM7TDMI /ARM7TDMI-S /ARM7EJ-S /ARM7TDI-S /ARM720T /ARM740T /SecurCore系列(SC100/SC110/SC200/SC210)ARM9全系列:ARM9TDMI /ARM9E-S /ARM9EJ-S /ARM920T /ARM922T /ARM925T /ARM940T /ARM926EJ-S /ARM946E-S /ARM966E-SARM10全系列:ARM1020T / ARM1020E /ARM10200 /ARM10200E /ARM10220E /ARM1022EIntel® XScale 微架构系列:IOP321 PXA210 PXA250 PXA255 IXP425 80200 80321 IR7所有使用上述一个或多个内核的ASIC和目标系统,都能使用techor ICE™来进行调试工作。
第二章JTAG口介绍这一章主要介绍跟techorICE™相关的JTAG接口知识。
具体的JTAG标准和协议,可以查阅IEEE 1149.1协议。
接口连接接口电平TCK信号频率设置目标系统设计指南RTCK时钟JTAG接口转换座2.1 接口连接这部分主要讲述JTAG口的信号功能及应用说明。
下图是JTAG接口的信号排列示意图:图2-1 JTAG口的信号排列图接口是一个20脚的IDC插座。
下表给出了具体的信号说明:引脚信号名相对仿真器的信号方向信号描述1 VTref 输入接口电平参考电压,通常可直接接电源2 Vsupply 输入电源3 nTRST 输出 TargetJTAG口复位-在目标端应当做上拉处理以防误复位4 GND -- 地5 TDI 输出 TestDataIn-从仿真器输出到目标板,目标板端应当做上拉或者下拉处理6 GND -- 地7 TMS 输出Test Mode Signal-目标板端应当做上拉处理8 GND -- 地9 TCK 输出 TestClock-目标板端应当做上拉或者下拉处理10 GND -- 地11 RTCK 输入 ReturnTestClock-由目标端反馈给仿真器的时钟信号,用来同步TCK信号的产生。
不使用时可以直接接地12 GND -- 地13 TDO 输入Test Data Out-14 GND -- 地15 nSRST 输出/输入Target System Reset-与目标板上的系统复位信号相连。
可以直接对目标系统复位,同时可以检测目标系统的复位情况。
为了防止误触发,目标板端应当做上拉处理16 GND -- 地17 DBGRQ -- 调试ARM内核时不使用18 GND -- 地19 DBGACK-- 调试ARM内核时不使用20 GND -- 地表2-1 JTAG引脚说明2.2 接口电平techorICE™推荐的正常使用电压为2.5 – 5.0V,最大不超过2.0 – 5.5V。
随着电源电压的变化,接口的逻辑高电平和判决门限电平都将随之变化,这使得techorICE™能够与不同电压的目标系统在逻辑上兼容。
下面一张图显示了这种变化关系:图2-2接口逻辑电平变化关系V oh是指techorICE™的输出逻辑高电平。
V i (th) 是输入信号的逻辑判决门限电平。
这两者之间存在下述关系:Vi (th) = 1/2(Voh)2.3 TCK信号频率设置为了与不同速率的目标对象相兼容,JTAG口的通信速率应调整到一个合适的水平。
数据传输速率是由TCK信号的频率来决定的,有两种方法可以调节TCK信号的频率。
(1) 在Server program中手动设置打开菜单设置->JTAG设置,在对应的栏中填入要求的数值。