西门子6SE70参数
「西门子变频器6SE70整流单元6RA70440等调试参数」
「西门子变频器6SE70整流单元6RA70440等调试参数」西门子变频器6SE70和整流单元6RA70是西门子电气公司生产的一种用于控制和调节交流电动机运行的设备,广泛应用于工业控制领域。
在调试和设置这些设备的过程中,需要注意一些参数的调整和配置。
以下是一些常见的调试参数和配置方法,该文将对此进行详细介绍。
1.1输出频率和电压范围:在调试变频器时,需要确定输出频率和电压范围。
根据实际需求,一般需要设置变频器的输出频率和电压范围,以适应驱动电动机的运行需求。
1.2加速和减速时间:加速和减速时间是控制电动机启停过程中重要的参数。
通过调整变频器的加速和减速时间,可以达到良好的启停效果。
1.3控制模式:变频器可以采用多种不同的控制模式,如速度闭环控制、扭矩闭环控制等。
根据不同的应用场景,选择合适的控制模式。
1.4输出电流限制:为了保护电动机和变频器设备,可以设置输出电流限制。
通过限制输出电流,可以延长设备的使用寿命。
2.1输入电压和电流范围:整流单元负责将交流电压转换为直流电压供电动机使用。
因此,在调试整流单元时,需要设置输入电压和电流范围。
2.2输出电压和电流范围:整流单元将变频器输出的直流电压转换为合适的输出电压和电流供电动机使用。
在调试整流单元时,需要设置输出电压和电流范围。
2.3功率因数调整:整流单元可以通过调整功率因数来提高系统的功效。
在调试整流单元时,可以根据实际需求调整功率因数的大小。
3.调试参数的配置方法:3.1进入参数设置界面:根据设备型号和不同的操作界面,进入参数设置界面。
通常可以通过设备的显示屏和按键来完成此操作。
3.2参数选项的调整:在参数设置界面中,可以找到相应的参数选项,并进行调整。
根据调试需求,选择合适的参数值,并进行保存。
3.3调试实验和验证:在进行参数调整后,进行一系列的实验和验证,以确保参数设定的准确性和稳定性。
通过实时监测设备运行的状态和输出结果,对参数进行修正和优化。
西门子6se70变频器参数
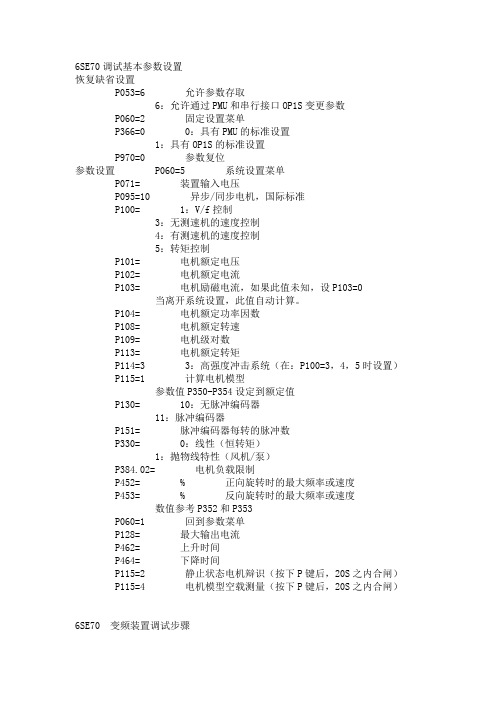
6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
1.2 简单参数设定P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数P071 进线电压(变频器400V AC / 逆变器540V DC)P95=10 IEC 电机P100=1 V/F 开环控制3 不带编码器的矢量控制4 带编码器的矢量控制P101 电机额定电压P102 电机额定电流P107 电机额定频率HZP108 电机额定速度RPMP114=0P368=0 设定和命令源为PMU+MOPP370=1 启动简单应用参数设置P60=0 结束简单应用参数设置执行上述参数设定后,变频器自动组合功能图连接和参数设定。
西门子6SE70参数

6SE70变频器参数详解摘取自网络P072:变频器进线电流P095:电机类型P100:选择开/闭环控制方式的功能参数P114:选择各种工艺边界调节启动控制系统的功能参数P115:选择各种启动环节和特殊功能的功能参数P101:电机额定电压P102:电机额定电流P103:电机励磁电流P104:功率因素P107:电机额定频率P108:电机额定转速P109:电机极对数P113:电机额定转矩P120:与电机额定阻抗相关的电机电感P121:设定定子与电缆电阻P122:根据电机额定阻抗设定的电机定子侧总漏抗P127:估算转子电阻温度影响P128:最大输出电流P130 编码器类型P151 编码器脉冲数P215:在一控制的采样时间(P357)内,设定所允许的转速实际值最大变法P216:设定n/f实际值预控滤波时间常数P223:设定接到速度调节器负输入端的n/f实际值滤波时间常数P235:速度调节器增益P235:速度调节环P参数P240:速度调节环I时间参数P240:速度调节器积分时间P258:最大允许电动的有功功率P259:运行回馈的最大有功功率P273:转矩平滑给定的滤波时间常数功能参数,它只在弱磁区使用P278:在低速范围内,无编码器速度控制(频率控制P100=3)过程中,所需最大附加动态转矩P279:在低速范围内,无编码器速度控制(频率控制P100=3)过程中最大附加动态转矩P283:在调制器异步调制范围内设定PI电流调节器调整增益P284:在调制器异步调制范围内设定PI电流调节器调整时间P303:设定磁通给定滤波时间常数P306:设定最大EMF的功能参数P313:电流模式切换位反EMF模式P315:设定电机额定电压反EMF模式的PI调节器积分增益P316:设定用于反EMF模式的PI调节器积分时间P319:输入电流提升P322:设定低频高加速转矩的附加电流给定P325:f=0Hz时的电压提升P326:设定电压提升结束频率P331:设定电流限幅(Imax调节器)PI调节器增益P334:设定定子电阻或长电缆上电压损耗补偿系数P335:设定转矩电流滤波时间常数P336:设定转差补偿比例增益P337:设定共振阻尼增益P347:校正逆变器IGBTs对称开关管P349:触发单元闭琐补偿时间P350:电流量参考值P351:电压量参考值P352:频率参考值P353:转速参考值P354:转矩参考值P357:采样时间P368:选择转子和定子阻抗温度适配P368:命令源来源P370:激活命令源来源配P380:电机热报警门槛值P381:电机热故障门槛值p383:电机热时间参数P384:电机负载限制P392:设定电机电损允许量P396:DC制动电流给定P397:DC制动持续时间P401:KK41百分比设定值P402:KK42百分比设定值P403:KK43百分比设定值P404:KK44百分比设定值P405:kk45频率设定值P406:kk46频率设定值P407:kk47频率设定值P408:kk48频率设定值P409:KK49转速设定值P410:KK50转速设定值P411:KK51转速设定值P412:KK52转速设定值P443:主给P433:附加给定1P438:附加给定2P486:力矩控制给定P452:正转时最大频率或速度P453:反转时最大频率或速度P462:加速时间从0到100%P464:减速时间从100%到0P471:n/f调节器预控增益P493 Torque-Hight limitP499 Torque-Low LimiP506 力矩附加给定P525:捕捉再启动在无测速机时输入到电机的电流给定值P587:速度环与电流环的连接P554:ON/OFFP555,P556,P557控制停车P558,P559,P560控制快速停车P602 :电机励滋时间P701 串口波特率P734:从变频器送给PLC的内容P918:DP地址U011:KK0411百分比设定值r550:K0030:控制字1r551:K0031:控制字2r552:K0032:状态字1r553:K0033:状态字2r646:数字输入输出端子转速:1)设定速度KK3002:从PLC上发送过来的转速设定值r447:kk0069:主给定设定值r451:KK0071:主给定与附加给定1叠加后的转速给定r460:KK0072:在斜坡函数发生器前的主给定设定值r480:KK0073:在斜坡函数发生器后的主给定设定值r481:KK0074:主给定与附加给定1,附加给定2叠加后的转速给定r482:KK0075:主给定与附加给定1,附加给定2叠加后再经过限幅后的转速给定KK0078:正方向速度设定值限幅KK0079:反方向速度设定值限幅r229:kk0150:在速度调节器的给定与实际值比较之前的经过滤波的速度给定2)实际速度kk0091:n/f(act,encod)r002:kk0020:经过滤波后的最终实际速度????r218:kk0148:在速度调节器的给定与实际值比较之前的在滤波前的速度实际值r230:kk0151:在速度调节器的给定与实际值比较之前的经过滤波的速度实际值r255:k0153:速度调节器速度输出值3)速度偏差KK152:速度调节器输入的给定与实际速度的偏差4)速度调节器r237:k0156:速度调节器的当前增益= p235速度调节器增益的值k0154:速度调节器的比例分量k0155:速度调节器的积分分量k0161:在速度调节器输出的转矩上限值k0162:在速度调节器输出的转矩下限值电流:K0242:从三相主接线输出的电流输出值r004:kk0022:从三相主接线输出的电流经过滤波后的输出值r272:K0167:经转矩和电流限幅后转矩电流分量的给定值(定子电流转矩分量设定值)K0168:电流调节器转矩限幅中的转矩电流分量给定(在K0167后)r129:k0175:电流限幅调节器最大电流限幅的当前有效值K0178:电机空载时低频滤波电流的给定r281:k0179:磁通电流分量的给定K0179:电流磁通分量的给定K0182:电流磁通分量的实际值K0184:电流转矩分量的实际值r511:k0085:附加电流给定r832.1:k0238:变频器U相电流输出瞬时值r832.2:k0239:变频器W相电流输出瞬时值K0204:从三相主接线输出的电压输出值r003:K0021:从三相主接线输出再经过滤波后的电压输出值K0240:直流母排的电压输出值r006:k0025:直流母排的电压经过滤波后的电压输出值转矩:r490:k0080:从动装置的转矩给定r510:k0086:从动装置的附加转矩给定r497:k0082:转矩固定设定值上限r503:k0084:转矩固定设定值下限k0161:在速度调节器输出的转矩上限值k0162:在速度调节器输出的转矩下限值r269:K0165:经过限幅后的转矩输出值r219:K0241:转矩实际值r007:显示转矩,显示值按参考转矩(P354)表称:K0172:速度限幅调节器转矩上限值:K0173:速度限幅调节器转矩下限值r496:k0081 固定转矩上限的最大设定值(这只是一个固定给定值,并非最终转矩上限值)r497:k0082 固定转矩下限的最大设定值(这只是一个固定给定值,并非最终转矩下限值)r005:实际输出的有功功率r833:变频器内部温度r949:Faultr272:K0167:定子电流转矩分量设定值kk0091:n/f(act,encod)r218:KK148:转速实际值r219:K0241:转矩实际值r004:K0242:电流输出值r003:K0021:电压输出值r001:变频器当前状态r002:实际速度值r005:实际输出的有功功率r007:显示转矩,显示值按参考转矩(P354)表称r006:K0025:中间直流母排电压值r550:K0030:控制字1r551:K0031:控制字2r552:K0032:状态字1r553:K0033:状态字2r833:变频器内部温度r949:FaultKK152:速度调节器输入的给定与实际速度的偏差r255:k0153:速度调节器的输出K0154:速度调节器的比例分量K0155:速度调节器的积分分量r237:k0156:速度调节器的当前增r481:KK007 主给定与附加给定1叠加后的转速给定r482:KK0075 主给定与附加给定1叠加后再经过限幅后的转速给定r496:k0081 转矩上限的最大值r497:k0082 转矩下限的最大值k3002:从PLC通过DP送过来的速度设定值。
西门子6SE70变频器参数设置步骤
1.(P060=4)3. (P060=5)4.1. (P060=2)2.(((P060=2)6-1P060=6 060=8)6SE70..P072P073P366)Select "Fixed settings" menuStart parameter reset0: Parameter reset1: No parameter changeSelect desired factory setting0: Standard1: Standard with OP1S2: Cabinet unit with OP1S (BICO1) or terminal strip (BICO2)3: Cabinet unit with PMU (BICO1) or terminal strip (BICO2)4: Cabinet unit with NAMUR terminal strip (SCI)Note:This parameter was correctly set prior todelivery of the unit and only needs to beGrant parameter access6:Parameter changes permitted via PMU and serial interfaceUnit carries out parameterreset and then leaves the"Fixed settings" menu6SCom1(OP1SOP1S(SCI)P366OP1S PMU(SCI)(Src=6-2()11=KKxxxx==(4000 0000h = 100 %)6.2.16-352(P366=0)SIMOVIS3.SIMATIC)SCom2(CBP)Automation unit(e. g. SIMATIC S7)LaptopOP1SOperating modeIndividual operationBus operationType of constructionCompact, chassisCompact, chassisTerminalOperating modeIndividual operationType of constructionCompact, chassisTerminalX300(SCom1)U SSUSS via RS232Operating modeBus operationType of constructionOptional board CBxe. g. CBP for ProfibusTerminale. g. X448for CBPb us-sp ec i f ic,,,X448RS485OP1S6-3P704))SIMOVISP060OP1S SIMOVISP0606CUVCP1096-4)P116, P128, P215, P216, P217, P223, P235, P236, P240, P259,P278, P279, P287, P295, P303, P313, P396, P471, P525, P602,P603.(P060=3)1. ()2.3.(P060=0)BICO1♦♦/(xxxr.m.sDC(VdmaxIEC()11/(v/f+(P130=11)1(f-)4(n-)(P130=11)5P151=1024/(P100=3,4,5).200kW.()IECNEMA Hp%rpm()1246UL1s.(P384.2)100%.(PMU+MOP123MOP4SIMATIC)5)6)7SCom1PMU)USSSIMOLINKPROFIBUSP366=0)1LA50632-6-10-1LA5063480780----1LA5070480600720---1LA5073480600720---1LA5080480600720---1LA5083600600720---1LA5090300540720720--1LA5096360660720840--1LA5106480720720960--1LA5107-720-960--1LA5113840660780720--1LA5130660600780600--1LA5131660600----1LA5133-600840600--1LA5134--960---1LA516390011401200720--1LA5164900-----1LA516690011401200840--1LA518315001800----1LA5186-180024002700--1LA52061800-2700---1LA52071800210027003000--1LA6220-2400-3300--1LA62232100240030003300--1LA62532400270030003600--1LA62802400300033003900--1LA62832400300033003900--1LA63102700330036004500--1LA6313-330036004500--1LA831.2100240027002700300030001LA835.240027003000300033003300 P383T11LA-/1LL4-8-12-1LA51PH6101PH6131PH6161PH6181PH6201PH622T1(s)150018002100240024002400n=1150rpm T1=1200n100132160180225T1(s)15001800210024002400180225T1(s)180018001LA71PH61PA61PL6(P351)(P353)(P060=5)P35350.00 Hz(P353=P352x60/P109)P113P113()A080!(P368)P368=+P368 = 2FSetp +P368 = 3MOP +P368 = 4USS P368 = 7OP1S +FSetpP554.1Src ON/OFF1B0005B0022B0022B0022B2100B2100P555.1Src OFF21B0020B0020B0020B21011P561.1Src InvRelease 1B00161111P565.1Src1 Fault Reset B2107B2107B2107B2107B2107B2107P567.1Src3 Fault Reset 0B0018B0018B001800P568.1Src Jog Bit00000B2108B2108P571.1Src FWD Speed 1111B2111B2111P572.1Src REV Speed 1111B2112B2112P573.1Src MOP Up B000800B001400P574.1Src MOP Down B000900B001600P580.1Src FixSetp Bit000B0014000P581.1Src FixSetp Bit100B0016000P590Src BICO DSet 000000P651.1Src DigOut1B0107B0107B0107B0107B0107B0107P652.1Src DigOut2B0104B0104B0104B0104B0104B0104P653.1Src DigOut30B01150000P654.1Src DigOut4(16-4000h=100%)KKxxxx=(32-4000 000h=100%)6.3.1CUVCSelect "Power section definition" menuReturn to parameter menuInput the code number for the unit concernedThe code number is allocated to the order numbers (MLFB).The order number can be read off the unit's rating plate.The list of units is on the following pages.P071(MLFB)In [A]PWE6SE7016-1EA61 6.136SE7018-0EA618.096SE7021-0EA6110.2116SE7021-3EB6113.2186SE7021-8EB6117.5256SE7022-6EC6125.5356SE7023-4EC6134.0426SE7023-8ED6137.5466SE7024-7ED6147.0526SE7026-0ED6159.0566SE7027-2ED6172.066 230 V3AC 380 V600 VIn [A]PWE6SE7016-1TA61 6.146SE7018-0TA618.0106SE7021-0TA6110.2126SE7021-3TB6113.2196SE7021-8TB6117.5266SE7022-6TC6125.5366SE7023-4TC6134.0436SE7023-8TD6137.5476SE7024-7TD6147.0536SE7026-0TD6159.0576SE7027-2TD6172.067 310 VDC 510 V810 VIn [A]PWE650 VIn [A]PWEIn [A]PWESelect "Board configuration" menuSCB protocol0: SCI1: USS 4-wire2: USS 2-wire3: Peer-to-PeerSCB inserted ?noEnter the CB parameters 1 to 11 necessary for the insertedcommunications boards CBxThe necessary CB parameters and their significance can be CBx inserted ?SCI12311CBCBxms2340 m7.5.SIMOLINK(CBxr8263Br8265Dr8267FT300SCB13901101291391491691()121SCB2131T300134CBX1151EB2(V/f()♦S1(n(M4%♦P103%)P103(P101)(800kW)(22kW)(U=P101n=P108♦P107P109))♦(1-P108 / 60xP109/P107)(800 kW)(22 kW )10%(P115=2)20()100%(±10%)P1078HzP101P108P108=((8Hz-P107old )x60/P109)+P108old0=dv/dtDC10NEMA()12()/v/f2)3(f)4(n)5200 kW(P100A)(%)P103=0(IECNEMA Hp)NEMAHzP107)()1)2)41112132150)1(/(FLM)4-/)V()P353P352T1 (19)T0UL?(F020s300%%P352P352P4621=P4641=P20 sAT1A080!(°009)%A08020sFxxx(V/fP350(()P88;P155P312P354♦P115=2P115=2• P103P121P127P349P284P316♦4P103n/f P116P235P240(P115=2,3)P095=P100=P101 (109)P339=P340=P357=♦P0680)♦P340 2.5 kHzP34290%f-(P100=3)n-(P100=4)P315 = EMF Reg.Kp 2 x Kp KpP223 = Smooth.n/f(act)≥ 0 ms≥ 4 msP216 = Smooth. n/f(pre)≥ 4.8 ms≥ 0.0 msP222 = Src n/f(act)KK0000KK0000 (KK0091)Tn(P240))。
6SE70调试基本参数设置
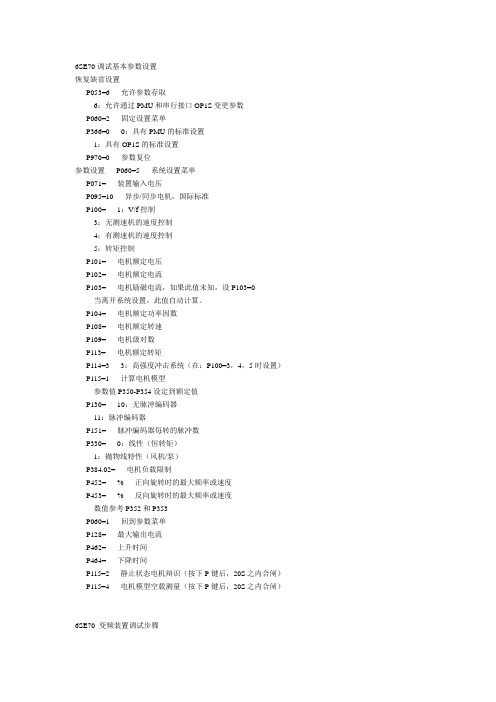
6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
1.2 简单参数设定P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数P071 进线电压(变频器400V AC / 逆变器540V DC)P95=10 IEC 电机P100=1 V/F 开环控制3 不带编码器的矢量控制4 带编码器的矢量控制P101 电机额定电压P102 电机额定电流P107 电机额定频率HZP108 电机额定速度RPMP114=0P368=0 设定和命令源为PMU+MOPP370=1 启动简单应用参数设置P60=0 结束简单应用参数设置执行上述参数设定后,变频器自动组合功能图连接和参数设定。
西门子变频器6SE70、整流单元、6RA70、440等调试参数

西门子变频器6SE70、整流单元、6RA70、440等调试参数6RA70直流装置的调试步骤一.送电前检查装置和电机辅助电源系统送电检查接地线和辅助电源零线检查电机绝缘检查和编码器安装检查电机电枢绕组和励磁绕组对地绝缘和电阻检查检查装置风机和柜顶风机电源和转向检查电机风机电源和转向装置电源和控制电源检查编码器电源和信号线检查二.基本参数设定(计算机或PMU单元完成)1.系统设定值复位及偏差调整用PMU执行功能P051= 21,调用缺省的工厂设置参数构成基本参数文件用P052=0显示那些与初始工厂设置不同的参数。
合上装置控制电源和操作控制电源执行P051=21,偏差调整(P051=22)同时进行,参数P825.02被设置。
2.整流装置参数设定P067=1-5 选择负载过负荷周期,见手册,当本参数大于1时,整流器额定直流电流R072.01将变为所选周期内的基本负载值,P075参数必须设定为1或2。
一般情况下,装置的计算的晶闸管温升包容上述过载周期P075=0 不允许装置过载,装置最大输出电流被限制在额定直流电流R072.01 =1 电枢电流最大值被限制在P077*1.8*整流器额定直流电流R072.01,当计算的晶闸管温升超过允许值时,报警A039激活,电枢电流给定自动自动减小到整流器额定电流R072.01。
=2 整流器电枢电流最大值被限制在P077*1.8*整流器额定直流电流R072.01当计算的晶闸管温升超过允许值时故障F039被激活。
本参数根据电机额定参数值和使用工况从保护装置过载的角度出发进行设置,本参数与P067共同作用,对装置的过负荷周期进行设定。
P078.01= 630V主回路进线交流电压作为判断电压故障的基准值P078.02= 380V,励磁进线电压作为欠压或过压的判断门槛电压,相关参数见P351,P352,P361-P364.3.电机参数设定P100(F)= 额定电动机电枢电流(A) P101(F)=额定电动机电枢电压(V) P102(F)= 额定电动机励磁电流(A) P103(F)=最小电机励磁电流(A)必须小于P102的50%.在弱磁调速场合一般设定到防止失磁的数值. P110电枢回路电阻,P111电枢回路电感,P112励磁回路电阻:在优化过程自动设定。
6se70调试参数及应用总结

Automation and Drives
70系列
调试与故障排除
A&D RN CS Wang Lihua 010-64765775
page 1
Automation and Drives
应用:预充电
A&D RN CS Wang Lihua 010-64765775
A&D RN CS Wang Lihua 010-64765775 page 28
Automation and Drives
应用:常用功能图
180/190:控制字 200/210:状态字 90:CUD板开关量输入/输出 120:DP通讯 80/114:CUVC板模拟量输入 81/116:CUVC帮模拟量输出 290/324:固定值设定 300/325:MOP设定 30:显示器(调试用) 317:斜坡函数发生器
page 10
Automation and Drives
6SE70运行调试:系统设置
1
A&D RN CS Wang Lihua 010-64765775
参见使用大全(上册)P6-59
page 11
Automation and Drives
A&D RN CS Wang Lihua 010-64765775
page 22
Automation and Drives
负载的分类
1. 风机、水泵负载:阻转矩与转速 的二次方成正比,如图中的曲线 ①所示。低速时的阻转矩比额定 转矩小得多。 2. 恒转矩负载:在不同的转速下, 负载的阻转矩基本不变,如图中 之曲线②所示。低速时的阻转矩 与额定转速时是基本相同的。如 传送带、搅拌机、挤压机等摩擦 类负载以及吊车、提升机等位能 负载。 3. 恒功率负载:在不同的转速下, 负载功率保持恒定,其机械特性 呈双曲线状(转矩与转速成反 比),如图中之曲线③所示。低 速时的阻转矩比额定转速时还要 大得多。如机床主轴和轧机、造 纸机、塑料薄膜生产线中的卷取 机、开卷机等。
02SIEMENS6SE70参数设置

Propared by Liu Jianyong 2011-Oct.
13
参数设定_简单应用
Electrical Training
Propared by Liu Jianyong -Oct.
14
参数设定_专家设置
电子箱及电子板的安装
Electrical Training
Propared by Liu Jianyong 2011-Oct.
M - Minimum and Maximum Speed
• 最大频率正向P452,反向P453
A - Accel Time 1 and Decel Time 1
• 加速时间 P462,加速时间单位P463 • 减速时间 P464,减速时间单位P465
R - Reference Source
28
参数设定_系统设置
Electrical Training
Propared by Liu Jianyong 2011-Oct.
29
参数设定_系统设置
Electrical Training
Propared by Liu Jianyong 2011-Oct.
30
参数设定_系统设置
Electrical Training
Electrical Training
Propared by Liu Jianyong 2011-Oct.
37
参数设定_功能块
Electrical Training
Propared by Liu Jianyong 2011-Oct.
38
参数设定_BICO连接
Electrical Training
Propared by Liu Jianyong 2011-Oct.
西门子变频器6SE70、整流单元、6RA70、440等调试参数
西门子变频器6SE70、整流单元、6RA70、440等调试参数参考资料:/s/blog_71facf000100pyy1.html6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
6SE70 参数表

参数说明 定义参数化接口的功能 选择当前功能菜单 选择PPO型 选择PROFIBUS地址 选择当前功能菜单 通讯卡监控 选择当前功能菜单
设定值 2 4 4 7--12 7 0 1
设定说明 PMU操作控制面板 电子板配置 PPO型:4 地址为7-12 读取随意使用 不监控 CBX通讯板
三,速度给定通道
P060 P443 控制字 P554 P558 P561 P562 P563 P564 P566 P571 P572 选择当前功能菜单 选择读入主给定 7 3003 读取随意使用 读入CBP的PZD WORD2
斜坡停车模式 快速停车 脉冲使能 斜坡使能 启动斜坡发生器 设定使能 故障复位 讯
二,电机参数设置
P060 P095 P101 P102 P107 P108 P462 P464 P466 控制模式 P100 选择当前功能菜单 选择电机类型 电机电压 电机电流 电机频率 电机速度 斜坡发生器加速时间 斜坡发生器减速时间 快停减速时间 选择变频器控制模式 3 10 400 50 15 15 5 3 斜坡发生器加速时间15秒 斜坡发生器减速时间15秒 快停减速时间5S(缺省值) 不带测速机的矢量控制(f-控制) 简单应用参数设置 IEC感应电机
3100 3102 3103 3104 3105 3106 3107 3111 3112
读入CBP的PZD WORD1 BIT 0 读入CBP的PZD WORD1 BIT 2 读入CBP的PZD WORD1 BIT 3 读入CBP的PZD WORD1 BIT 4 读入CBP的PZD WORD1 BIT 5 读入CBP的PZD WORD1 BIT 6 读入CBP的PZD WORD1 BIT 7 读入CBP的PZD WORD1 BIT 11 读入CBP的PZD WORD1 BIT 12
(整理)西门子6se70系列变频器参数设置
西门子6se70系列变频器参数设置一加减速时间加速时间就是输出频率从0 上升到最大频率所需时间,减速时间是指从最大频率下降到0 所需时间。
通常用频率设定信号上升、下降来确定加减速时间。
在电动机加速时须限制频率设定的上升率以防止过电流,减速时则限制下降率以防止过电压。
加速时间设定要求:将加速电流限制在变频器过电流容量以下,不使过流失速而引起变频器跳闸;减速时间设定要点是:防止平滑电路电压过大,不使再生过压失速而使变频器跳闸。
加减速时间可根据负载计算出来,但在调试中常采取按负载和经验先设定较长加减速时间,通过起、停电动机观察有无过电流、过电压报警;然后将加减速设定时间逐渐缩短,以运转中不发生报警为原则,重复操作几次,便可确定出最佳加减速时间。
二转矩提升转矩提升又叫转矩补偿,是为补偿因电动机定子绕组电阻所引起的低速时转矩降低,而把低频率范围f/V 增大的方法。
设定为自动时,可使加速时的电压自动提升以补偿起动转矩,使电动机加速顺利进行。
如采用手动补偿时,根据负载特性,尤其是负载的起动特性,通过试验可选出较佳曲线。
对于变转矩负载,如选择不当会出现低速时的输出电压过高,而浪费电能的现象,甚至还会出现电动机带负载起动时电流大,而转速上不去的现象。
三电子热过载保护本功能为保护电动机过热而设置,它是变频器内CPU 根据运转电流值和频率计算出电动机的温升,从而进行过热保护。
本功能只适用于“一拖一”场合,而在“一拖多”时,则应在各台电动机上加装热继电器。
电子热保护设定值(%)=[电动机额定电流(A)/变频器额定输出电流(A)]×100%。
四频率限制即变频器输出频率的上、下限幅值。
频率限制是为防止误操作或外接频率设定信号源出故障,而引起输出频率的过高或过低,以防损坏设备的一种保护功能。
在应用中按实际情况设定即可。
此功能还可作限速使用,如有的皮带输送机,由于输送物料不太多,为减少机械和皮带的磨损,可采用变频器驱动,并将变频器上限频率设定为某一频率值,这样就可使皮带输送机运行在一个固定、较低的工作速度上。
西门子6SE70系列变频器调试指南

西门子6SE70系列变频器调试指南一. 参数复位出厂设定值步骤1:P053=6 (选择“允许通过PMU 和串行接口SCom1 (OP1S)和PC)变更参数”);步骤2:P060=2 (选择“固定设置”菜单);步骤3:P366=0 (选择“具有PMU 的标准,通过MOP (BICO1)的设定值”);步骤4:P970=0 (选择“启动参数复位”)。
步骤5:P060=0 (选择“用户参数”)参数复位后,变频器通过PMU操作。
二. 快速调试步骤1:P060=3 (菜单选择“简单应用的参数”);步骤2:P071=380 (输入装置进线电压,单位为V);步骤3:P095=10 (选择输入类型为IEC标准异步电动机);步骤4:P100=1 (选择“V/f开环控制方式”);步骤5:P101=?(输入电机额定电压,单位为V,见电机铭牌);步骤6:P102=?(输入电机额定电流,单位为A,见电机铭牌);步骤7:P104=?(输入电机功率因数,见电机铭牌);步骤8:P107=?(输入电机额定频率,单位为Hz,见电机铭牌);步骤9:P108=?(输入电机额定转速,单位为r/min,见电机铭牌);步骤10:P=109=?(输入电机极对数,见电机铭牌);步骤11:P368=?(选择设定值和命令源:0:通过PMU+MOP1操作面板进行操作1:通过端子排上的模拟量/数字量输入2:通过端子排上的固定设定值和数字量输入3:通过端子排上的MOP 和数字量输入);步骤12:P370=1 (启动简单应用的参数设置);之后变频器开始自检,完成后面板将显示008,将X101端子1和8短接,此时面板显示009,代表准备运行,这样变频器就可以通过P368设定的控制源进行控制了。
下面具体介绍P368为不同值时变频器的接线和操作方法。
1.P368=0,通过PMU操作(面板操作)P368=0时,变频器只通过PMU可以操作,操作方法如图1所示。
图1 P368=0,PMU操作方法2.P368=1,通过端子排上的模拟量输入(电位计操作)此时变频器端子接线如图2所示。
6SE70调试基本参数设置
6SE70调试基本参数设置1恢复缺省设置:P053=6 允许参数存取6:允许通过PMU变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置P970=0 参数复位1.1出厂参数设定P052=1 选定建立工厂设置功能按下“P”键,运行显示“001”,根据P077 对所有参数进行工厂设置。
结束工厂设置后,显示“008”或“009”。
1.2 标准应用设置P051=2 存取级“标准模式”P053=7 参数设置权限使能“CB+PMU+SST1&OP”P052=5 传动系统设置P071=400 电源电压P052=21 选择电路识别功能在PMU 按下“I”键,进行电路识别,约需10s。
如果出现故障,则必须重新识别。
(r947,r949 显示故障码和故障值)P052=0 选定返回功能。
1.3 其他设置P554.1=P555.1=1010 由PMU 输出分闸指令,在分闸前不等待中间回路电压放电至1.35×P071 的20%。
P603.1=1001 端子17/18 故障输出P555.1=1005 端子13 急停P70 设置MLFB2 26SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
1.2 简单参数设定P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数P071 进线电压(变频器400V AC / 逆变器540V DC)P95=10 IEC 电机P100=1 V/F 开环控制3 不带编码器的矢量控制4 带编码器的矢量控制P101 电机额定电压P102 电机额定电流P107 电机额定频率HZP108 电机额定速度RPMP114=0P368=0 设定和命令源为PMU+MOPP370=1 启动简单应用参数设置P60=0 结束简单应用参数设置执行上述参数设定后,变频器自动组合功能图连接和参数设定。
(整理)西门子6se70系列变频器参数设置
西门子6se70系列变频器参数设置一加减速时间加速时间就是输出频率从0 上升到最大频率所需时间,减速时间是指从最大频率下降到0 所需时间。
通常用频率设定信号上升、下降来确定加减速时间。
在电动机加速时须限制频率设定的上升率以防止过电流,减速时则限制下降率以防止过电压。
加速时间设定要求:将加速电流限制在变频器过电流容量以下,不使过流失速而引起变频器跳闸;减速时间设定要点是:防止平滑电路电压过大,不使再生过压失速而使变频器跳闸。
加减速时间可根据负载计算出来,但在调试中常采取按负载和经验先设定较长加减速时间,通过起、停电动机观察有无过电流、过电压报警;然后将加减速设定时间逐渐缩短,以运转中不发生报警为原则,重复操作几次,便可确定出最佳加减速时间。
二转矩提升转矩提升又叫转矩补偿,是为补偿因电动机定子绕组电阻所引起的低速时转矩降低,而把低频率范围f/V 增大的方法。
设定为自动时,可使加速时的电压自动提升以补偿起动转矩,使电动机加速顺利进行。
如采用手动补偿时,根据负载特性,尤其是负载的起动特性,通过试验可选出较佳曲线。
对于变转矩负载,如选择不当会出现低速时的输出电压过高,而浪费电能的现象,甚至还会出现电动机带负载起动时电流大,而转速上不去的现象。
三电子热过载保护本功能为保护电动机过热而设置,它是变频器内CPU 根据运转电流值和频率计算出电动机的温升,从而进行过热保护。
本功能只适用于“一拖一”场合,而在“一拖多”时,则应在各台电动机上加装热继电器。
电子热保护设定值(%)=[电动机额定电流(A)/变频器额定输出电流(A)]×100%。
四频率限制即变频器输出频率的上、下限幅值。
频率限制是为防止误操作或外接频率设定信号源出故障,而引起输出频率的过高或过低,以防损坏设备的一种保护功能。
在应用中按实际情况设定即可。
此功能还可作限速使用,如有的皮带输送机,由于输送物料不太多,为减少机械和皮带的磨损,可采用变频器驱动,并将变频器上限频率设定为某一频率值,这样就可使皮带输送机运行在一个固定、较低的工作速度上。
6SE70参数表
整流单元调试步骤1.1 出厂参数设定P052=1 选定建立工厂设置功能按下“P”键,运行显示“001”,根据P077 对所有参数进行工厂设置。
结束工厂设置后,显示“008”或“009”。
1.2 标准应用设置P051=2 存取级“标准模式”P053=7 参数设置权限使能“CB+PMU+SST1&OP”P052=5 传动系统设置P071=400 电源电压P052=21 选择电路识别功能在PMU 按下“I”键,进行电路识别,约需10s。
如果出现故障,则必须重新识别。
(r947,r949 显示故障码和故障值)P052=0 选定返回功能。
1.3 其他设置P554.1=P555.1=1010 由PMU 输出分闸指令,在分闸前不等待中间回路电压放电至1.35×P071 的20%。
P603.1=1001 端子17/18 故障输出P555.1=1005 端子13 急停P70 设置MLFB2 26SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
1.2 简单参数设定P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数P071 进线电压(变频器400V AC / 逆变器540V DC)P95=10 IEC 电机P100=1 V/F 开环控制3 不带编码器的矢量控制4 带编码器的矢量控制P101 电机额定电压P102 电机额定电流P107 电机额定频率HZP108 电机额定速度RPMP114=0P368=0 设定和命令源为PMU+MOPP370=1 启动简单应用参数设置P60=0 结束简单应用参数设置执行上述参数设定后,变频器自动组合功能图连接和参数设定。
西门子变频6SE70调试基本参数设置

6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置 P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置) P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸) P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
6SE70变频器参数设置

6SE70调试步骤P115参数说明:1 = 自动参数设置根据电机额定铭牌数据和触发单元的配置进行v/f进行开环控制和闭环控制参数计算(例如:P340 脉冲频率)2 = 静态电机辨识依据电机测量参数(不设定 n/f 调节器)进行闭环控制的参数设置;包括接地故障检测和功能1(仅对P095 = 10, 11 异步电机而言)3 = 完全电机参数辨识(包括功能 1, 2, 4, 5, 7)(仅对P100 = 3, 4, 5 矢量控制方式而言)(仅对 P095 = 10, 11 异步电机而言)注意:A078报警之后, 装置必须合闸及进行静态测试.静态测试完成之后, 报警信号A080出现,同时装置重新上电.然后空载测试速度调节器优化开始4 = 空载测试(仅对P100 = 3, 4, 5 矢量控制方式而言)(仅对 P095 = 10, 11 异步电机而言)5 = n/f 调节器优化(仅对P100 = 3, 4, 5 矢量控制方式而言)6 = 自检(对应功能 2,但没有参数改变)(仅对 P095 = 10, 11 异步电机而言)7 =测速机测试(仅对P100 = 3, 4, 5 矢量控制方式而言)控制字1说明:CONTROL WORD1 BIT0 ON/OFF1 启动/停止命令CONTROL WORD1 BIT1 自由停车命令CONTROL WORD1 BIT2 快速停车命令CONTROL WORD1 BIT3 调速器使能命令CONTROL WORD1 BIT4 斜坡功能使能命令CONTROL WORD1 BIT5 斜坡功能开始命令CONTROL WORD1 BIT6 给定有效命令CONTROL WORD1 BIT7 故障复位命令CONTROL WORD1 BIT8 点动BIT0CONTROL WORD1 BIT9 点动BIT1CONTROL WORD1 BIT10 LIFE CYCLE位CONTROL WORD1 BIT11 正转CONTROL WORD1 BIT12 反转CONTROL WORD1 BIT13电动电位计给定增加CONTROL WORD1 BIT14电动电位计给定减小CONTROL WORD1 BIT15外部故障1若设备启动时,先把参数切换到R550,显示为4个八段码,检查CONTROL WORD1的前七位是否都为1,若都为1,设备运行。
西门子变频器参数设置

西门子6SE70系列变频器参数设置参考参数号设定值释义P536格式化P602参数恢复出厂值软件程序P3660如果P366=10那么U800=1 P9700P608功率定义P70?例如:型号6SE7016-1TA61应设置为4,见附表5参数组切换P5901定义采用第2套BICO数据组P651.1.2 B0定义端子X101:3作为开关量输入1(默认为开关量输出1)开关量P652.1.2B0定义端子X101:4作为开关量输入2(默认为开关量输出2)设置P653.1.2 B0定义端子X101:5作为开关量输入3(默认为开关量输出3)P654.1.2 B0定义端子X101:6作为开关量输入4(默认为开关量输出4)U239.1B10U239.2B12定义端子X101:3开关量输入1和端子X101:4 U950.9010开关量输入2为“或”关系都可以on/off操作启动、正反转控制、外P554.2B619部故障、复P571.2B10定义端子X101:3开关量输入1为正向旋转位设置P572.2B12定义端子X101:4开关量输入2为反向旋转P558.2B20定义端子X101:8开关量输入6为外部故障P565.2B22定义端子X101:9开关量输入7为复位P418.2B0P417.2B14 定义端子X101:5开关量输入3为开关量速度给定P581.2B16 定义端子X101:6开关量输入4为开关量速度给定开关量速度给定P580.2B18定义端子X101:7开关量输入5为开关量速度给定P443.2KK40速度主给定连接参数P40110%固定给定值1(一档速度给定)P40225%固定给定值2(二档速度给定)P40340%固定给定值3(三档速度给定)P40850HZ固定给定值8(四档速度给定)P674.1B106EB2板开关量输出1为故障输出1WOIRD格式西门子6SE70系列变频器参数设置参考参数号设定值释义P795KK148P7965%P7970比较值处理P7980P0605选择系统设置P0680无输出滤波器P071380V装置输入电压P09510电机型式P1001V/F控制方式P101380V电机额定电压P102?电机额定电流之和P1030电机励磁电流———自动设定P1040.8电机功率因数P10750HZ电机额定频率P108?电机额定转速P109?电机极对数P113?电机额定转矩P1140选择工艺条件启动控制系统P1151计算电机模型P1281.5倍装置最大输出电流P13011测速机的连接方式P1511024脉冲编码器脉冲数P3300系统V/F模式功能参数:0为线性特性P350?电流参考值P351380V电压参考值P35250HZ频率参考值P353?转速参考值P354?转矩参考值P35710采样时间,如果报F042适量增加该参数P45250HZ 正向旋转时的最大频率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
6SE70变频器参数详解
摘取自网络
P072:变频器进线电流
P095:电机类型
P100:选择开/闭环控制方式的功能参数
P114:选择各种工艺边界调节启动控制系统的功能参数
P115:选择各种启动环节和特殊功能的功能参数
P101:电机额定电压
P102:电机额定电流
P103:电机励磁电流
P104:功率因素
P107:电机额定频率
P108:电机额定转速
P109:电机极对数
P113:电机额定转矩
P120:与电机额定阻抗相关的电机电感
P121:设定定子与电缆电阻
P122:根据电机额定阻抗设定的电机定子侧总漏抗
P127:估算转子电阻温度影响
P128:最大输出电流
P130 编码器类型
P151 编码器脉冲数
P215:在一控制的采样时间(P357)内,设定所允许的转速实际值最大变法
P216:设定n/f实际值预控滤波时间常数
P223:设定接到速度调节器负输入端的n/f实际值滤波时间常数
P235:速度调节器增益
P235:速度调节环P参数
P240:速度调节环I时间参数
P240:速度调节器积分时间
P258:最大允许电动的有功功率
P259:运行回馈的最大有功功率
P273:转矩平滑给定的滤波时间常数功能参数,它只在弱磁区使用
P278:在低速范围内,无编码器速度控制(频率控制P100=3)过程中,所需最大附加动态转矩P279:在低速范围内,无编码器速度控制(频率控制P100=3)过程中最大附加动态转矩
P283:在调制器异步调制范围内设定PI电流调节器调整增益
P284:在调制器异步调制范围内设定PI电流调节器调整时间
P303:设定磁通给定滤波时间常数
P306:设定最大EMF的功能参数
P313:电流模式切换位反EMF模式
P315:设定电机额定电压反EMF模式的PI调节器积分增益
P316:设定用于反EMF模式的PI调节器积分时间
P319:输入电流提升
P322:设定低频高加速转矩的附加电流给定
P325:f=0Hz时的电压提升
P326:设定电压提升结束频率
P331:设定电流限幅(Imax调节器)PI调节器增益P334:设定定子电阻或长电缆上电压损耗补偿系数P335:设定转矩电流滤波时间常数
P336:设定转差补偿比例增益
P337:设定共振阻尼增益
P347:校正逆变器IGBTs对称开关管
P349:触发单元闭琐补偿时间
P350:电流量参考值
P351:电压量参考值
P352:频率参考值
P353:转速参考值
P354:转矩参考值
P357:采样时间
P368:选择转子和定子阻抗温度适配
P368:命令源来源
P370:激活命令源来源配
P380:电机热报警门槛值
P381:电机热故障门槛值
p383:电机热时间参数
P384:电机负载限制
P392:设定电机电损允许量
P396:DC制动电流给定
P397:DC制动持续时间
P401:KK41百分比设定值
P402:KK42百分比设定值
P403:KK43百分比设定值
P404:KK44百分比设定值
P405:kk45频率设定值
P406:kk46频率设定值
P407:kk47频率设定值
P408:kk48频率设定值
P409:KK49转速设定值
P410:KK50转速设定值
P411:KK51转速设定值
P412:KK52转速设定值
P443:主给
P433:附加给定1
P438:附加给定2
P486:力矩控制给定
P452:正转时最大频率或速度
P453:反转时最大频率或速度
P462:加速时间从0到100%
P464:减速时间从100%到0
P471:n/f调节器预控增益
P493 Torque-Hight limit
P499 Torque-Low Limi
P506 力矩附加给定
P525:捕捉再启动在无测速机时输入到电机的电流给定值
P587:速度环与电流环的连接
P554:ON/OFF
P555,P556,P557控制停车
P558,P559,P560控制快速停车
P602 :电机励滋时间
P701 串口波特率
P734:从变频器送给PLC的内容
P918:DP地址
U011:KK0411百分比设定值
r550:K0030:控制字1
r551:K0031:控制字2
r552:K0032:状态字1
r553:K0033:状态字2
r646:数字输入输出端子
转速:
1)设定速度
KK3002:从PLC上发送过来的转速设定值
r447:kk0069:主给定设定值
r451:KK0071:主给定与附加给定1叠加后的转速给定
r460:KK0072:在斜坡函数发生器前的主给定设定值
r480:KK0073:在斜坡函数发生器后的主给定设定值
r481:KK0074:主给定与附加给定1,附加给定2叠加后的转速给定
r482:KK0075:主给定与附加给定1,附加给定2叠加后再经过限幅后的转速给定KK0078:正方向速度设定值限幅
KK0079:反方向速度设定值限幅
r229:kk0150:在速度调节器的给定与实际值比较之前的经过滤波的速度给定2)实际速度
kk0091:n/f(act,encod)
r002:kk0020:经过滤波后的最终实际速度????
r218:kk0148:在速度调节器的给定与实际值比较之前的在滤波前的速度实际值r230:kk0151:在速度调节器的给定与实际值比较之前的经过滤波的速度实际值r255:k0153:速度调节器速度输出值
3)速度偏差
KK152:速度调节器输入的给定与实际速度的偏差
4)速度调节器
r237:k0156:速度调节器的当前增益= p235速度调节器增益的值k0154:速度调节器的比例分量
k0155:速度调节器的积分分量
k0161:在速度调节器输出的转矩上限值
k0162:在速度调节器输出的转矩下限值
电流:
K0242:从三相主接线输出的电流输出值
r004:kk0022:从三相主接线输出的电流经过滤波后的输出值
r272:K0167:经转矩和电流限幅后转矩电流分量的给定值(定子电流转矩分量设定值)K0168:电流调节器转矩限幅中的转矩电流分量给定(在K0167后)
r129:k0175:电流限幅调节器最大电流限幅的当前有效值
K0178:电机空载时低频滤波电流的给定
r281:k0179:磁通电流分量的给定
K0179:电流磁通分量的给定
K0182:电流磁通分量的实际值
K0184:电流转矩分量的实际值
r511:k0085:附加电流给定
r832.1:k0238:变频器U相电流输出瞬时值
r832.2:k0239:变频器W相电流输出瞬时值
K0204:从三相主接线输出的电压输出值
r003:K0021:从三相主接线输出再经过滤波后的电压输出值
K0240:直流母排的电压输出值
r006:k0025:直流母排的电压经过滤波后的电压输出值
转矩:
r490:k0080:从动装置的转矩给定
r510:k0086:从动装置的附加转矩给定
r497:k0082:转矩固定设定值上限
r503:k0084:转矩固定设定值下限
k0161:在速度调节器输出的转矩上限值
k0162:在速度调节器输出的转矩下限值
r269:K0165:经过限幅后的转矩输出值
r219:K0241:转矩实际值
r007:显示转矩,显示值按参考转矩(P354)表称
:K0172:速度限幅调节器转矩上限值
:K0173:速度限幅调节器转矩下限值
r496:k0081 固定转矩上限的最大设定值
(这只是一个固定给定值,并非最终转矩上限值)
r497:k0082 固定转矩下限的最大设定值
(这只是一个固定给定值,并非最终转矩下限值)
r005:实际输出的有功功率
r833:变频器内部温度
r949:Fault
r272:K0167:定子电流转矩分量设定值
kk0091:n/f(act,encod)
r218:KK148:转速实际值
r219:K0241:转矩实际值
r004:K0242:电流输出值
r003:K0021:电压输出值
r001:变频器当前状态
r002:实际速度值
r005:实际输出的有功功率
r007:显示转矩,显示值按参考转矩(P354)表称
r006:K0025:中间直流母排电压值
r550:K0030:控制字1
r551:K0031:控制字2
r552:K0032:状态字1
r553:K0033:状态字2
r833:变频器内部温度
r949:Fault
KK152:速度调节器输入的给定与实际速度的偏差
r255:k0153:速度调节器的输出
K0154:速度调节器的比例分量
K0155:速度调节器的积分分量
r237:k0156:速度调节器的当前增
r481:KK007 主给定与附加给定1叠加后的转速给定
r482:KK0075 主给定与附加给定1叠加后再经过限幅后的转速给定r496:k0081 转矩上限的最大值
r497:k0082 转矩下限的最大值
k3002:从PLC通过DP送过来的速度设定值。