无碳小车Matlab轨迹仿真及路径图教学内容
“S”形轨迹无碳小车的结构设计与运动仿真

将小车微分运动看作是绕其某一圆心的圆周运动,如
图 3 所示,则小车车身中线运动的圆弧长度为前轮运动距
离 Sf,圆弧半径为 Rf,小车车身中线在微分运动 i 内转过
的角度为:
(7)
图 4 小车微分运动原理图
方法 2: 将小车微分运动看作小车车身中线末端沿着上一个 微分运动结束时的中线方向直行,车身中线前端 (即前
(2) 式中:r———正弦机构的曲柄长度; l———正切机构的转向杆旋转轴心与导轨间距离; l0———导轨长度微调量; 琢0———前轮拐角微调量。 2 运动轨迹求解 由于小车运动机构的复杂性,难以直接利用数学方程 对小车前进的运动轨迹进行积分求解。利用 MATLAB 仿 真 软 件 ,将 小 车 的运 动 进 行 微 分 ,求 出 每 个 微 分 运 动 中 小 车转向及位移的变化量,最后将各个微分运动结果进行叠 加,即可求得小车总体的运动轨迹。 在每个微分运动内,当小车处于转弯状态时小车的三 个轮子可以看作是进行圆弧运动,如图 3 所示,小车左右 转运动时其主动轮右后轮分别处于运动轨迹圆弧的外侧 及内侧[2],不便于求解其微分运动结果后进行叠加运算,因 此为了方便计算选取小车前轮的运动轨迹进行求解。 图 3(a)中,当小车处于右转状态时,主动轮右后轮位于 运动轨迹弧线内侧,前轮的转弯半径 Rf1 大于右后轮的转弯 半径 Rr1,假设微分运动内前轮转角为定值 琢1,依据几何关 系列出前轮前进距离 Sf1 与绕线轴转角 兹1 之间关系方程:
(3)
Internal Combustion Engine & Parts
· 241 ·
轮)沿着前轮方向前行[3],如图 4 所示,则可得出微分运动 i 结束后小车车身中线相对跑道在微分运动内转过的角 度 茁(i)为:
8字形无碳小车的建模与Matlab仿真
8字形无碳小车的建模与Matlab仿真作者:武时会来源:《科技风》2017年第14期DOI:10.19392/ki.16717341.201714023摘要:针对第5届工程训练大赛“无碳小车”的要求,设计出一种利用重力使能转化为动能的三轮8字形“无碳小车”,利用转向机构改变运动方向以实现无碳小车行进路线沿8字形轨迹绕行。
运用Solidworks进行建模装配,并利用相关运动学公式计算出8字形曲线的理论轨迹,以便设计出结构更加合理的8字形无碳小车。
关键词:无碳小车;运动仿真;工程训练;Solidworks建模给定一重力势能,根据能量转换原理,设计一种可将该重力势能转换为机械能并可用来驱动小车行走的装置[1]。
该自行小车在前行时能够自动避开赛道上设置的障碍物,把他称为无碳小车。
设计出的8字形无碳小车需要合理转化重力势能,以求能走出更多8字绕行轨迹[2]。
本文基于Solidworks平台对小车进行零部件设计,然后进行装配。
并通过Matlab软件行走轨迹进行模拟仿真,得到结构合理、绕行次数加多的8字形无碳小车。
1 结构方案设计与建模根据大赛要求,需设计出结构合理,能完成绕行8字轨迹的要求,为方便设计这里讲整车运动结构划分为3个相关模块进行分别设计,3个模块分别为驱动行进模块、转向模块以及微调模块。
1.1 驱动行进模块设计驱动模块作用是将重块的重力势能转化为此8字形无碳小车的行进动能。
并将这一动能传递给驱动轮以带动整车沿8字轨迹绕行[3],驱动行进模块除实现这一功能要求外还需要达到以下几点额外要求:(1)重力势能产生的驱动动能应合理以避免整车在行进过程中产生过大的行进速度导致整车翻转,或整车在行进过程中产生额外偏载荷。
(2)行进过程中速度应先加速后减速,以保证整车行进稳定性。
(3)整车行至终点时,速度应逐渐减小至最小值以避免撞击。
(4)重物竖直下降速度随时间在增大,为增加重力势能转化率,应设法减小驱动过程中整车的内部耗能。
无碳小车与仿真设计
车架
三、仿真
小车仿真
圆柱凸轮
四、设计总结
创新之处:
气压动力转换装置中由于气压的作用 使转换的动力相对较平缓;
空间凸轮机构具有体积小、结构紧凑、 刚性好、转动扭矩大等优点; 小车模型全部在Adams中参数化建 立,Solidworks只是提供模型示意和 前期具体设计参数。
不足之处
汽缸模型单独建立,并没有固联在小 车上的齿条上提供源动力; 这次路线设计的杆距过大,接近 1.5m; 凸轮在仿真过程中虽然画出了廓线, 但是没有把凹槽建出,反转法建立后 小车运行一段距离后停止,具体原因 有待深入讨论。
传动比为4:1
转向装置——圆柱凸轮
圆柱凸轮转向示意图
总体设计方案的示意图
2.路径规划
开始规划最后采用来自实际路径3.理论计算
气压传动输出力
根据各个气室的体积、有效面积、活塞输 出力、物块下落过程中气室压强建立活塞 输出力模型
凸轮廓线
考虑到圆柱凸轮属于空间凸轮,其理论廓面、 实际廓面均为空间曲面,因此,如何构造 这些曲面是一个关键问题
无碳小车与仿真设计
指导教师:郭卫东 教授 团队:马 鑫 吕斗攀
张忠祥 涂修佳
一、方案设计 二、设计建模 三、仿真分析 四、设计总结
一、总体设计
动力装置 传动装置 转向装置
动力装置——气压传动装置
把重力势能转化为活塞水平方向的动能
物块
传动装置的物理模型简图
活塞
传动装置——齿轮齿条
小齿轮
齿条
大齿轮
Ti 为i室的温度,在此都大气温度
dx 为活塞的移动速度; dt Si 为活塞在ii室的有效面积
Pi 为i室内的气体压力
R 为气体常数,R=231.97;
matlab平面轨迹课程设计
matlab平面轨迹课程设计一、教学目标本课程的目标是使学生掌握MATLAB软件在平面轨迹绘制方面的基本应用。
通过本课程的学习,学生将能够:1.知识目标:理解MATLAB软件的基本操作和功能,掌握MATLAB在平面轨迹绘制中的常用命令和语法。
2.技能目标:能够独立使用MATLAB软件进行平面轨迹的绘制和分析,具备解决实际问题的能力。
3.情感态度价值观目标:培养学生对科学探究的兴趣,增强学生的实践能力和创新精神。
二、教学内容本课程的教学内容主要包括以下几个部分:1.MATLAB软件的基本操作和功能介绍。
2.MATLAB在平面轨迹绘制中的常用命令和语法讲解。
3.平面轨迹绘制和分析的实例演示和练习。
4.实际问题解决的案例分析和实践。
三、教学方法为了实现课程目标,我们将采用多种教学方法相结合的方式进行教学:1.讲授法:通过讲解MATLAB软件的基本操作和功能,让学生掌握MATLAB的基本使用方法。
2.案例分析法:通过分析实际问题,让学生学会使用MATLAB进行平面轨迹的绘制和分析。
3.实验法:通过上机实践,让学生独立完成平面轨迹的绘制和分析,提高学生的实际操作能力。
四、教学资源为了支持教学内容和教学方法的实施,我们将准备以下教学资源:1.教材:选用《MATLAB教程》作为主教材,系统地介绍MATLAB的基本操作和功能。
2.多媒体资料:制作PPT和视频教程,直观地展示MATLAB的使用方法和技巧。
3.实验设备:为学生提供计算机实验室,让学生能够随时进行上机实践。
4.网络资源:为学生提供在线学习平台,方便学生随时查阅资料和交流讨论。
五、教学评估为了全面、客观、公正地评估学生的学习成果,我们将采取以下评估方式:1.平时表现:通过观察学生在课堂上的参与程度、提问回答等情况,评估学生的学习态度和积极性。
2.作业:布置与课程内容相关的作业,评估学生的理解和应用能力。
3.考试:定期进行考试,全面测试学生对MATLAB平面轨迹绘制知识的掌握程度和实际操作能力。
8字形无碳小车的建模与Matlab仿真
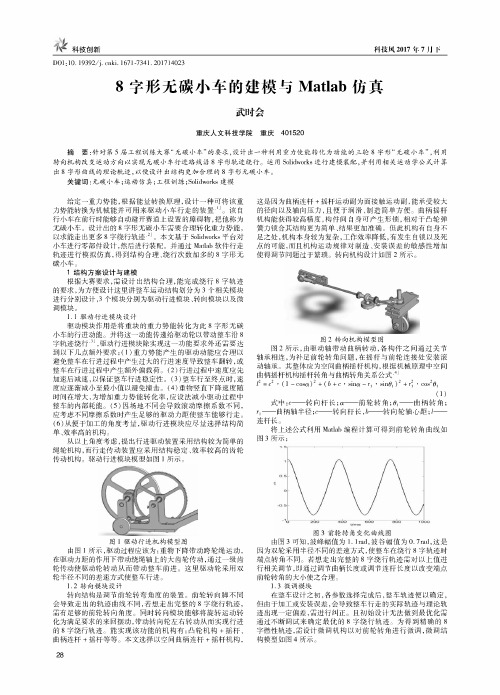
科技风2017年7月下科技创新DOI:10.19392/ki.1671-7341.2017140238字形无碳小车的建模与Matlab仿真武时会重庆人文科技学院重庆401520摘要:针对第5届工程训练大赛“无碳小车”的要求,设计出一种利用重力使能转化为动能的三轮8字形“无碳小车”,利用 转向机构改变运动方向以实现无碳小车行进路线沿8字形轨迹绕行。
运用Solidworks进行建模装配,并利用相关运动学公式计算 出8字形曲线的理论轨迹,以便设计出结构更加合理的8字形无碳小车。
关键词:无碳小车;运动仿真;工程训练;Solidworks建模给定一重力势能,根据能量转换原理,设计一种可将该重 力势能转换为机械能并可用来驱动小车行走的装置[1]。
该自 行小车在前行时能够自动避开赛道上设置的障碍物,把他称为 无碳小车。
设计出的8字形无碳小车需要合理转化重力势能,以求能走出更多8字绕行轨迹[2]。
本文基于SMdwoks平台对 小车进行零部件设计,然后进行装配。
并通过M Q Q软件行走 轨迹进行模拟仿真,得到结构合理、绕行次数加多的8字形无 碳小车。
1结构方案设计与建模根据大赛要求,需设计出结构合理,能完成绕行8字轨迹 的要求,为方便设计这里讲整车运动结构划分为3个相关模块 进行分别设计,3个模块分别为驱动行进模块、转向模块以及微 调模块。
1.1驱动行进模块设计驱动模块作用是将重块的重力势能转化为此8字形无碳 小车的行进动能。
并将这一动能传递给驱动轮以带动整车沿8 字轨迹绕行[3],驱动行进模块除实现这一功能要求外还需要达 到以下几点额外要求:(1)重力势能产生的驱动动能应合理以 避免整车在行进过程中产生过大的行进速度导致整车翻转,或 整车在行进过程中产生额外偏载荷。
(2)行进过程中速度应先 加速后减速,以保证整车行进稳定性。
(3)整车行至终点时,速 度应逐渐减小至最小值以避免撞击。
(4)重物竖直下降速度随 时间在增大,为增加重力势能转化率,应设法减小驱动过程中 整车的内部耗能。
基于MATLAB的“8”字绕障无碳小车的轨迹模拟
摘 要 :设计了一种数控激光切割机智能夹钳系统,这种智能夹钳系统能够实现板材加工过程中的固定,利用夹钳固定板 材时,保证夹钳使用的方便性,而且能使板材利用率达到最高。
关 键 词 :板材加工;激光切割;夹钳
中图分类号:1G 4S 5
文献标志码: B
文章编号:1〇〇2-2333( 2〇17 )〇1-〇〇98-〇2
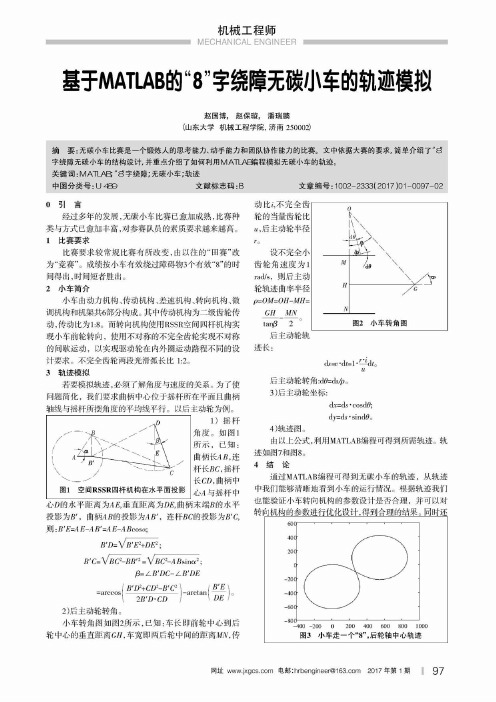
小车由动力机构、传 动 机 构 、差 速 机 构 、转向机构、微 调 机 构 和 机 架 共 6部 分 构 成 。其 中 传 动 机 构 为 二 级 齿 轮 传 动 ,传动比为1:8。而转向机构使用RSSR空间四杆机构实 现 小 车 前 轮 转 向 ,使用不对称的不完全齿轮实现不对称 的 间 歇 运 动 ,以 实 现 驱 动 轮 在 内 外 圈 运 动 路 程 不 同 的 设 计 要 求 。不 完 全 齿 轮 两 段 光 滑 弧 长 比 1:2 。 3 轨迹模拟
B'D='姨B'E1+ DE1 -
B 忆C='姨BC2-BB 忆2= V s C 2-ABsina2; 茁= 蚁B忆DC- 蚁B忆DE
=arccos I B 1D2+ CD2- B忆C2-arctan 蓸-B-’-E '
\ 2 B ’D-CD 蔀
' DE
2)后 主 动 轮 转 角 。
小 车 转 角图如图2所 示 ,已 知 :车长即前轮中心到后
轮中心的垂直距离GH,车宽即两后轮中间的距离M N 传
网址 电 邮 :hrbengineer@ 2017 年第 1 期
97
机械工程师 MECHANICAL ENGINEER
激光切割机智能夹钳系统
顾 春 \ 周 建 华 \ 周 庆 2, 岳俊强2, 陈林2 (1.扬州大学机械工程学院,江苏扬州225009;2.江苏金方圆数控机床有限公司,江 苏 扬 州 225127)
基于MATLAB的“长征”路线无碳小车设计与仿真

基于MATLAB的“长征”路线无碳小车设计与仿真目录1. 项目概述 (3)1.1 项目背景 (3)1.2 目标与意义 (4)1.3 项目范围与限制 (5)2. 理论基础 (7)2.1 电动汽车技术 (8)2.2 MATLAB在控制系统设计中的应用 (9)2.3 长征路线特点分析 (10)3. 设计原则与要求 (11)3.1 性能指标 (12)3.2 安全性要求 (13)3.3 环保与可持续性 (14)4. 长征路线小车设计 (16)4.1 总体设计方案 (17)4.2 动力系统设计 (18)4.3 控制系统设计 (20)4.4 车身结构设计 (22)4.5 电气系统设计 (23)4.6 传感器与执行器设计 (25)5. MATLAB仿真与验证 (26)5.1 仿真模型建立 (28)5.2 动力学仿真 (29)5.3 控制策略仿真 (30)5.4 稳定性与性能分析 (32)5.5 优化与仿真结果对比 (33)6. 测试方案与实验 (34)6.1 测试设备与环境 (36)6.2 测试流程设计 (38)6.3 数据采集与分析 (39)6.4 测试结果与讨论 (40)7. 环境影响评估 (42)7.1 碳排放分析 (44)7.2 能源效率 (45)7.3 生态影响 (46)7.4 社会经济影响 (47)8. 结论与展望 (48)8.1 项目总结 (49)8.2 设计创新点 (51)8.3 存在的问题 (52)8.4 未来发展方向 (53)1. 项目概述本项目旨在设计与仿真一款基于的无碳小车,其任务是在模拟的“长征”路线环境中进行导航和避障。
“长征”路线被定义为一个复杂的道路场景,包括不同类型的路面、交通标志、行人以及其他道路使用者。
该小车的目标是自主导航,并能够在模拟环境中实现无碳行驶,即采用电力作为其动力源,摒弃传统的化石燃料发动机。
设计目标包括确保小车的稳定性、动力性能、转向控制以及传感器的准确性和可靠性。
基于MATLAB的无碳小车轨迹优化
0引言
全国大学生工程训练综合能力竞赛[1]已经成功举办
四届,吸引全国众多重点院校参与其中,有效地培养了大
学生动手实践、运用理论知识的能力。由于“8”字形小车[2],
对尺寸设计、机械加工的精度要求较高,为避免主要尺寸
误差对小车运行轨迹造成较大误差,本文在利用解析法[3]
建立小车转向以及运行轨迹的数学模型[4],并利用MATLAB
车内部结构并阐述其工作原理,并利用解析法得到小车转向机构以及运行轨迹的数学模型。为对小车参数进行优化以得出
最优值,根据建立的数学模型,利用MATLAB对小车单周期以及多周期运行轨迹进行运动仿真,得出最优值结果r=0.005
35m,b=0.01345m。
关键词:无碳小车;运动方程;轨迹仿真;参数优化
中图分类号:TH 122;TP 391.9
car is illustrated. The mathematical model of the steering shaft and running track which is based on the analytical
method is completed. According to the established model, the simulation of the running track with multicycle is
对小车运行轨迹进行仿真[5],在得出单周期小车最优尺寸
的前提下,为减小累积误差,对小车进行多周期仿真,最
终得出小车参数最优值,为无碳小车的设计提供了有效
的参考。
1 工作原理分析
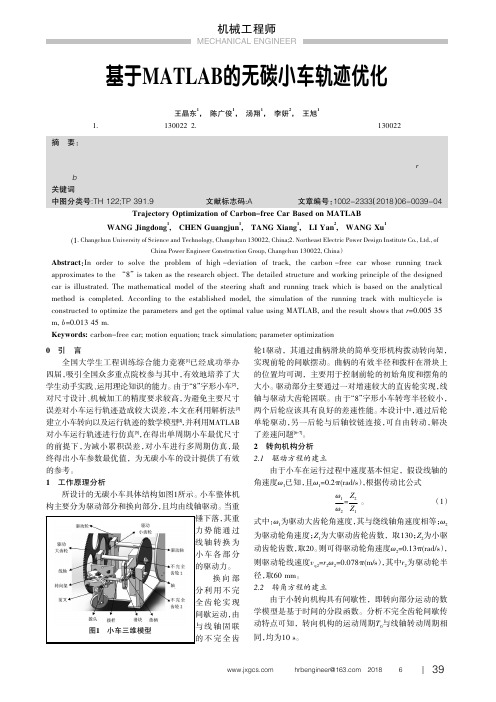
所设计的无碳小车具体结构如图1所示。小车整体机
构主要分为驱动部分和换向部分,且均由线轴驱动。当重
一种基于matlab计算的无碳小车设计

科学技术创新一种基于m at l ab 计算的无碳小车设计李海华何宗志张毅李文慧李秋妍(河南科技大学机电工程学院,河南洛阳471003)1比赛形式及场地规格1.1比赛形式势能驱动车(以下称为无碳小车)所使用的能量均由重物重力势能转换而得,不得使用任何其它形式的能量。
重力势能由自行设计制造的1kg ±10g 重物下降300±2mm 高度获得。
比赛方式,比赛形式由环形S 、八字S 、综合(环形+八字)三种运行方式组成,不同的运行方式使用不同的难度系数(即记录的分值不同)。
比赛路线见图1环形赛道。
图1环形S 赛道1.2场地规格无碳小车运行场地为5200mm*2200mm 的长方形平面区域。
如图所示,图中粗实线为边界挡板和中间隔板,中间有长1000mm 的缺口,缺口处的隔板中心线可以放一块活动隔板(如图1所示),活动隔板和中间隔板的厚度不超过12mm ;赛道上的点画线为赛道中心线,用于计量运行成绩以及判定有效成功绕桩;驱动车必须放置在发车区域内,并在发车线后按照规定的出发方向发车,前行方向为逆时针方向;在赛道中心线上放置有障碍物(桩)(如图1所示的圆点),障碍桩为直径20mm 、高200mm 的圆棒,障碍桩间距指两个障碍桩中心线之间的距离2无碳小车的主要结构形式2.1能量来源2.1.1重锤的制造:选用不锈钢棒料通过密度计算出所需体积,通过车床加工出1Kg ±10g 的重锤(已计入固定铝支座及螺丝的重量),并车倒角,防止在装拆时被重锤划伤。
重力势能通过自主设计制造的1kg ±10g 重锤下降300±2mm 高度获得。
2.1.2重锤上绕线方式的创新点设计:重锤上的导线轮采用单边固定(见图2中的重锤),目的是方便绕线,重锤上加导线轮[1],增长绕线长度(根据动滑轮原理,理论上可增长一倍绕线长度,即原来的300mm 的线长可增加到600mm ),增加绕线长度的好处就是当主动轮走的圈数过多时(即行驶长度足够长),若线的长度有限(仅有300mm ),则固定线的绕线轮的直径需要做的较小,但是绕线轮的直径越小越不好加工且有可能出现比绕线轮所在轴直径还小。
无碳小车的创新设计及仿真

无碳小车的创新设计及仿真樊晓帅;廖显羲;马坤武;李晓舟;纪思国【摘要】教育部高等教育司为了加强全国大学生的动手能力,创新意识,知识运用,开展了第五届全国大学生工程训练综合能力竞赛.基于第五届全国大学生综合能力竞赛,设计了一种以重力驱动且可走‘S’轨迹的无碳小车.针对小车设计思路、基本原理来进行讲解说明,并运用Matlab、CATIA、Solid Works等软件对小车进行模拟仿真.验证了设计理论,为小车的加工、装配提供理论依据.【期刊名称】《机械工程师》【年(卷),期】2018(000)004【总页数】3页(P76-78)【关键词】无碳小车;传动;转向;轨迹;仿真【作者】樊晓帅;廖显羲;马坤武;李晓舟;纪思国【作者单位】长春理工大学机电工程学院,长春130022;长春理工大学机电工程学院,长春130022;长春理工大学机电工程学院,长春130022;长春理工大学机电工程学院,长春130022;长春理工大学机电工程学院,长春130022【正文语种】中文【中图分类】TH1220 引言根据第五届全国大学生工程训练综合能力竞赛命题一,设计一种无碳小车,驱动其行驶及转向的能量均来源于1 kg重物的垂直下落(400±2)mm的能量[1]。
要求小车在行走过程中完成所有动作所需的能量均由此给定重力势能转换而得,不可以使用任何其他来源的能量。
要求小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地[2]。
要求小车为三轮结构。
其中一轮为转向轮,另外二轮为行进轮,允许二行进轮中的一个轮为从动轮。
具体设计、材料选用及加工制作均由参赛学生自主完成。
经现场公开抽签,在200~300 mm范围内产生一个“S”型赛道第一轮障碍物间距变化值和变化方向。
竞赛小车在前行时能够自动绕过赛道上设置的障碍物,见图1。
赛道宽度为2 m,障碍物为直径20 mm、高200 mm的圆柱棒,沿赛道中线从距出发线1 m处开始按间距1 m摆放,摆放完成后,将偶数位置的障碍物按抽签得到的碍物间距变化值和变化方向进行移动(正值远离,负值移近),形成的即为竞赛时的赛道。
“双8”字无碳小车的轨迹分析和结构设计
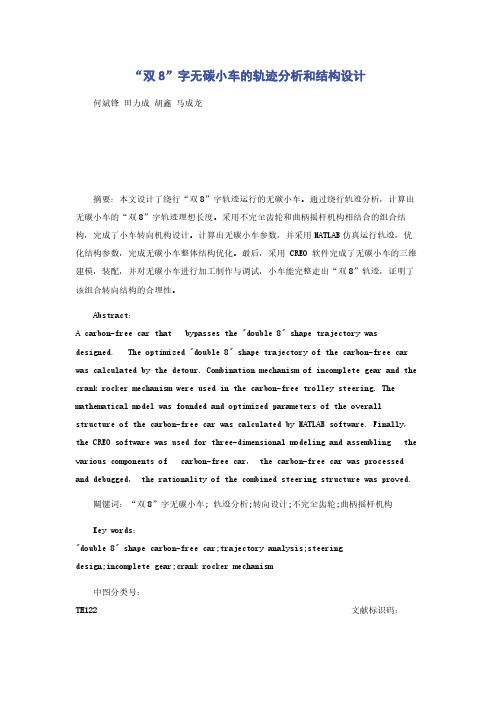
“双8”字无碳小车的轨迹分析和结构设计何斌锋田力成胡鑫马成龙摘要:本文设计了绕行“双8”字轨迹运行的无碳小车。
通过绕行轨迹分析,计算出无碳小车的“双8”字轨迹理想长度。
采用不完全齿轮和曲柄摇杆机构相结合的组合结构,完成了小车转向机构设计。
计算出无碳小车参数,并采用MATLAB仿真运行轨迹,优化结构参数,完成无碳小车整体结构优化。
最后,采用CREO软件完成了无碳小车的三维建模,装配,并对无碳小车进行加工制作与调试,小车能完整走出“双8”轨迹,证明了该组合转向结构的合理性。
Abstract:A carbon-free car that bypasses the"double8"shape trajectory was designed.The optimized"double8"shape trajectory of the carbon-free car was calculated by the bination mechanism of incomplete gear and the crank rocker mechanism were used in the carbon-free trolley steering.The mathematical model was founded and optimized parameters of the overall structure of the carbon-free car was calculated by MATLAB software.Finally,the CREO software was used for three-dimensional modeling and assembling the various components of carbon-free car,the carbon-free car was processed and debugged,the rationality of the combined steering structure was proved.關键词:“双8”字无碳小车;轨迹分析;转向设计;不完全齿轮;曲柄摇杆机构Key words:"double8"shape carbon-free car;trajectory analysis;steeringdesign;incomplete gear;crank rocker mechanism中图分类号:TH122文献标识码:A文章编号:1006-4311(2020)15-0177-030引言根据第六届全国工程训练大赛规则,在半张标准乒乓球台(长1525mm、宽1370mm)上,有3个障碍桩沿中线放置,障碍桩为直径20mm、长200mm的3个圆棒,两端的桩至中心桩的距离为350±50mm,要求小车以“双8”轨迹交替绕过中线上的3个障碍桩,保证每个障碍桩在“双8”字形的一个封闭圈内,如图1所示。
MATLAB计算可视化

实验报告实验3: 二维和三维绘图该实验作业设计教会学生基本的绘图操作(二维、三维、二维半),多层图、双y图和子图等的做法,图形的线型、轴等的控制。
你会发现通过适当的可以很好的控制绘制出曲线或者曲面图以反映更加丰富的信息。
一、实验目的:1.掌握MATLAB基本的二维图形绘制函数。
2.掌握坐标轴的控制。
3.掌握图形的标注。
4. 掌握绘制三维曲线的方法;5. 掌握绘制三维网格图和三维曲面图的方法;二、实验内容1.用 hold on 命令在同一图形窗口绘制曲线 y1=sin(t),y2=sin(2t) y3=sin(3t),其中 t=[0 10]。
创建.m文件。
1)看t的数据点个数对后面绘图的影响(如11个、51个等,大概多少曲线看着是连续曲线)。
2)绘制线图,线型分别用实线、虚线、点划线,颜色粉笔使用红、绿、蓝,并且控制线的粗细为2。
%mt=linspace(0,10,199);y1=sin(t);y2=sin(2*t);y3=sin(3*t);plot(t,y1,'r-','LineWidth',2);hold on;plot(t,y2,'g--','LineWidth',2);hold on;plot(t,y3,'b.-','LineWidth',2);2.要求绘制2行2列的子图,在四个区间上分别绘制, , ,四条曲线。
,图框box的on和off,均要有图名(表明轴是normal还是tight,box是on还是off),x、y轴标注'x''y';且绘制的图形可以导出pdf矢量图和分辨率200dpi 的tiff栅格图到当前目录(此要命令,不用插入图片到文档)。
x=linspace(0,12,9999);y1=0.1*exp(0.1*x)+sin(5*x);y2=0.2*exp(0.2*x)+sin(5*x+pi/4);y3=0.3*exp(0.3*x)+sin(5*x+3*pi/4);y4=0.4*exp(0.4*x)+sin(5*x+3*pi/4);subplot(2,2,1),plot(x,y1,'y-')%绘制2x2子图的第一张图axis('tight'),title('tight box off')%输出的图像轴为紧凑数据,图名为tight box offbox off%显示图形无四周边框xlabel('x'); %x轴名称为xylabel('y'); %y轴名称为ysubplot(2,2,2),plot(x,y2,'r-')axis('normal'),title('normal box off')box offxlabel('x');ylabel('y');subplot(2,2,3),plot(x,y3,'g-')axis('normal'),title('normal box off')box offxlabel('x');ylabel('y');subplot(2,2,4),plot(x,y4,'b-')axis('normal'),title('normal box off')xlabel('x');ylabel('y');box off;print('D:\MATLAB文件\p.pdf','-dpdf','-loose')%输出分辨率为pdf格式的矢量图像print('D:\MATLAB文件\j.jpeg','-djpeg','-r900','-loose')%输出分辨率为300dpi的jpeg栅格图像3. 根据MATLAB绘图环境,选择具体的命令绘制双y轴图。
无碳小车Matlab轨迹仿真及路径图
无碳小车Matlab轨迹仿真及路径图无碳小车Matlab仿真程序及路径图1.仿真程序clearclctic%符号定义%重物下降的高度h%驱动轴转过角度sd2%驱动轴传动比i%转向轮轴心距b%转向杆的长c%转向轮转过的角度af%驱动轮半径R%驱动轮A与转向轮横向偏距a1%驱动轮B与转向轮横向偏距a2%驱动轴与转向轮的距离d%小车行驶的路程s%小车x方向的位移x%小车y方向的位移y%轨迹曲率半径rou%曲柄半径r1%绳轮半径r2%参数输入n=1000;h=linspace(0,0.4,n);i1=0.5;i2=1.05;R=0.16;%驱动轮A与转向轮横向偏距a1a1=0.08;%驱动轮B与转向轮横向偏距a2a2=0.08;%曲柄半径r1r1=0.02;%绳轮半径r2r0=0.006;%驱动轴与转向轮的距离dd=0.2;%连杆与转向轮的距离cc=0.04;%算法g=-10;sd0=h/r0;sd1=sd0/i1;sd2=sd0/i2;af=atan(r1.*sin(sd2)/c);format longrou=a1+(d)./(tan(af));s=sd1*R;ds=s(2)-s(1);dy=ds*cos(af);dx=-ds*sin(af);x=cumsum(dx);y=cumsum(dy);xb=x-(a1+a2).*cos(af);yb=y-(a1+a2).*sin(af);xc=x-a1*cos(af)-d*sin(af);yc=y-a1*sin(af)+d*cos(af);plot(x,y,'b',xb,yb,'b',xc,yc,'r'); hold ongrid onfor i=1:20t=0:0.01:2*pi;xy=0.01.*cos(t)-0.23;yy=0.01.*sin(t)+i;plot(xy,yy);hold onend2.仿真路径。
“8”型路线无碳小车的设计(全套图纸)

摘要煤炭是大自然给予人类的一笔宝贵财富,可是由于人们对煤炭的巨大需求,煤炭资源日趋减少近于枯竭。
随着人们节能环保意识的提升,无碳理念也越来越被人们提上研究的课题。
更洁净,更环保,更节能,更高效的理念也深入人心。
本小车是对“无碳”理念的探索与开发,对未来“无碳”的憧憬,小车构思巧妙,在完成设计的要求下充分考虑了外观和成本等问题,方便以后的扩展和进一步的开发。
“无碳小车”系第二届全国大学生工程训练综合能力竞赛命题主题,目前实验阶段已经完成。
小车的设计分为三个阶段:方案设计、技术设计、制作调试。
方案设计阶段根据小车功能要求根据机器的构成(原动机构、传动机构、执行机构、控制部分、辅助部分)把小车分为车架、原动机构、传动机构、转向机构、行走机构、微调机构六个模块,进行模块化设计。
技术设计阶段采用了PROE等软件进行辅助设计。
小车大多是零件是标准件、可以购买,同时除部分要求加工精度高的部分需要特殊加工外,大多数都可以通过手工加工出来。
调试过程会通过微调等方式改变小车的参数进行试验,在试验的基础上验证小车的运动规律同时确定小车最优的参数。
关键词:无碳小车;方案设计;模块化设计;8型路线AbstractCoal is a valuable wealth of human nature, but because of the huge demand for coal and meager coal resources dwindling. As enhance awareness of energy saving and environmental protection, zero-carbon concept is increasingly being put on the research project. Cleaner, more environmentally friendly, more energy, more efficient idea is taking hold.Issue, later expanded and further developed. "Zero-carbon cars" of the second national students ' comprehensive ability of engineering training race in thesis theme, the current experimental phase has been completed.Car design is divided into three phases: design, technical design, making debugging. Programme design stage based on the car features under the machine's composition (original mechanism, actuator, actuator, control section, Assistant section) original car into the frame, body, transmission, steering agencies, travel agencies, fine-tune the bodies of six modules, modular design. Technical design stage using PROE software for aided design. Car most parts are standard parts, you can purchase, while some require high processing precision parts require special processing, most are available through the manual process. Debugging changes by way of fine tuning parameters of the car testing, experimental validation on the basis of the car in motion at the same time determine the optimal parameters for car.Key words:Carbon-free cares; design; modular design;8-courses目录摘要............................................................................................................... 错误!未定义书签。
双“8”字无碳小车轨迹仿真分析
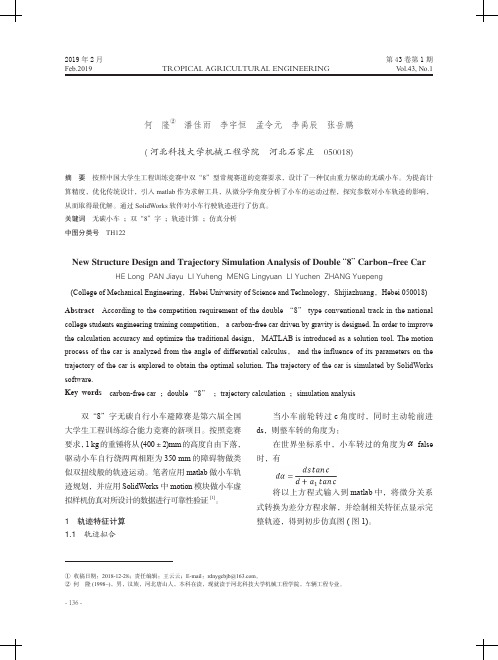
- 136 -2019年2月Feb.2019第43卷第1期V ol.43, No.1热 带 农 业 工 程TROPICAL AGRICULTURAL ENGINEERING双“8”字无碳自行小车避障赛是第六届全国大学生工程训练综合能力竞赛的新项目。
按照竞赛要求,1 kg 的重锤将从(400±2)mm 的高度自由下落,驱动小车自行绕两两相距为350 mm 的障碍物做类似双扭线般的轨迹运动。
笔者应用matlab 做小车轨迹规划,并应用SolidWorks 中motion 模块做小车虚拟样机仿真对所设计的数据进行可靠性验证[1]。
1 轨迹特征计算1.1 轨迹拟合当小车前轮转过c 角度时,同时主动轮前进ds ,则整车转的角度为:在世界坐标系中,小车转过的角度为αfalse 时,有将以上方程式输入到matlab 中,将微分关系式转换为差分方程求解,并绘制相关特征点显示完整轨迹,得到初步仿真图(图1)。
① 收稿日期:2018-12-28;责任编辑:王云云;E-mail :rdnygcbjb@ 。
② 何 隆(1998~),男,汉族,河北唐山人,本科在读,现就读于河北科技大学机械工程学院,车辆工程专业。
双“8”字无碳小车轨迹仿真分析①何 隆② 潘佳雨 李宇恒 孟令元 李禹辰 张岳鹏(河北科技大学机械工程学院 河北石家庄 050018)摘 要 按照中国大学生工程训练竞赛中双“8”型常规赛道的竞赛要求,设计了一种仅由重力驱动的无碳小车。
为提高计算精度,优化传统设计,引入matlab 作为求解工具,从微分学角度分析了小车的运动过程,探究参数对小车轨迹的影响,从而取得最优解。
通过SolidWorks 软件对小车行驶轨迹进行了仿真。
关键词 无碳小车 ;双“8”字 ;轨迹计算 ;仿真分析中图分类号 TH122New Structure Design and Trajectory Simulation Analysis of Double “8” Carbon-free CarHE Long PAN Jiayu LI Yuheng MENG Lingyuan LI Yuchen ZHANG Yuepeng(College of Mechanical Engineering ,Hebei University of Science and Technology ,Shijiazhuang ,Hebei 050018)Abstract According to the competition requirement of the double “8” type conventional track in the national college students engineering training competition , a carbon-free car driven by gravity is designed. In order to improve the calculation accuracy and optimize the traditional design , MATLAB is introduced as a solution tool. The motion process of the car is analyzed from the angle of differential calculus , and the influence of its parameters on the trajectory of the car is explored to obtain the optimal solution. The trajectory of the car is simulated by SolidWorks software.Key words carbon-free car ;double “8” ;trajectory calculation ;simulation analysis图1 小车完整轨迹仿真分析转向分析本设计采用的是空间四杆RSSR 机构,可实现前轮摆角大小的左右对称。
工创比赛无碳小车matlab轨迹代码编写

工创比赛无碳小车matlab轨迹代码编写无碳小车是一种绿色环保的交通工具,它采用电力驱动,不产生任何污染。
为了提高无碳小车的性能和控制精度,在工创比赛中,我们需要编写一些代码来控制无碳小车的运动轨迹。
此处我们使用Matlab编写轨迹控制代码,具体实现如下。
1.建立模型我们首先需要建立无碳小车的运动模型,以便控制它的行进。
无碳小车的运动模型可以表达为以下公式:x = (v*cos(theta))*ty = (v*sin(theta))*t其中,x、y分别为小车的位置坐标,theta为小车的方向角度,v为小车的速度,t为时间。
通过这个模型,我们可以根据小车的当前状态计算出它的下一个位置坐标。
2.控制轨迹为了让无碳小车按照我们想要的轨迹行进,我们需要对它进行控制。
我们可以采用PID控制算法,调整小车的速度和方向,使它沿着我们设定的轨迹运动。
以下是一个基本的PID控制算法实现:function [v,theta] = PIDControl(x,y,theta,x_d,y_d,theta_d,kp,kd,ki)error = [x_d-x;y_d-y;theta_d-theta];derivative = error - last_error;integral = integral + error;v = kp*error + kd*derivative + ki*integral;theta = atan2((y_d-y),(x_d-x));其中,x、y、theta是当前无碳小车的状态参数;x_d、y_d、theta_d是指定的目标位置和方向;kp、kd、ki是PID控制参数;v、theta是控制结果,即小车的速度和方向;error、derivative、integral是PID控制中的误差、微分和积分误差。
上述代码可以用于调节小车的速度和方向,并输出控制结果。
我们可以通过循环调用这个函数,不断更新小车的状态和方向,从而实现轨迹控制。
S型轨迹无碳小车的运动与仿真分析
S型轨迹无碳小车的运动与仿真分析作者:***来源:《价值工程》2019年第19期摘要:按照工程训练竞赛中“S”型赛道的竞赛要求,我们设计了一种仅由重力驱动的无碳小车。
为提高计算精度,优化设计,我们引入matlab作为求解工具,从微分学角度分析小车的运动过程。
通过对机构设计中的相关参量的赋值改变,探究其参数对小车轨迹的影响,从而取得最优解。
我们研制的小车在第六届全国大学生工训竞赛中荣获国家二等奖,本文所建立的算法为无碳小车的改进提供一种便捷的途径,对机构运动特性的相关研究也具有一定参考价值。
Abstract: In accordance with the requirements of the "S" track in the engineering training competition, we designed a carbon-free car driven only by gravity. In order to improve the calculation accuracy and optimize the design, matlab was introduced as the solving tool to analyze the car's motion process from the perspective of differential calculus. By changing the values of the relevant parameters in the mechanism design, the influence of the parameters on the trajectory of the car is explored, and the optimal solution is obtained. The car we developed won the second prize in the sixth national university student engineering training competition. The algorithm established in this paper provides a convenient way to improve the car without carbon, and has certain reference value for the research on the motion characteristics of the mechanism.关键词:无碳小车;matlab;轨迹计算;仿真分析Key words: carbon-free car;matlab;trajectory calculation;simulation analysis0; 引言S型无碳小车避障赛是第六届全国大学生工程训练综合能力竞赛的重要项目之一,是教育部高等教育司发文举办的全国性大学生科技创新实践竞赛活动,旨在提升大学生工程创新意识、实践能力和团队合作精神,促进创新人才培养。
无碳小车Matlab轨迹仿真及路径图
无碳小车Matlab仿真程序及路径图1.仿真程序clearclctic%符号定义%重物下降的高度h%驱动轴转过角度sd2%驱动轴传动比i%转向轮轴心距b%转向杆的长c%转向轮转过的角度af%驱动轮半径R%驱动轮A与转向轮横向偏距a1%驱动轮B与转向轮横向偏距a2%驱动轴与转向轮的距离d%小车行驶的路程s%小车x方向的位移x%小车y方向的位移y%轨迹曲率半径rou%曲柄半径r1%绳轮半径r2%参数输入n=1000;h=linspace(0,0.4,n);i1=0.5;i2=1.05;R=0.16;%驱动轮A与转向轮横向偏距a1 a1=0.08;%驱动轮B与转向轮横向偏距a2 a2=0.08;%曲柄半径r1r1=0.02;%绳轮半径r2r0=0.006;%驱动轴与转向轮的距离dd=0.2;%连杆与转向轮的距离cc=0.04;%算法g=-10;sd0=h/r0;sd2=sd0/i2;af=atan(r1.*sin(sd2)/c);format longrou=a1+(d)./(tan(af));s=sd1*R;ds=s(2)-s(1);dy=ds*cos(af);dx=-ds*sin(af);x=cumsum(dx);y=cumsum(dy);xb=x-(a1+a2).*cos(af);yb=y-(a1+a2).*sin(af);xc=x-a1*cos(af)-d*sin(af);yc=y-a1*sin(af)+d*cos(af);plot(x,y,'b',xb,yb,'b',xc,yc,'r');hold ongrid onfor i=1:20t=0:0.01:2*pi;xy=0.01.*cos(t)-0.23;yy=0.01.*sin(t)+i;hold on end2.仿真路径Welcome To Download !!!欢迎您的下载,资料仅供参考!。
一种S 型无碳小车的轨迹及参数设计
假 设 p(x,y) 为 轨 迹 上 任 意 一 点, 由 微
分法
,
;车
身转过角度
,驱动轴转过角度
,行驶距离
。进一步
得出任意参考点处的运动关系方程式
(6)
从而完成了小车运动模型的建立。
4 运动轨迹仿真
利用 Matlab 编写程序对其经行仿真分析, 从而可定出具体各个参数的值。考虑到加工 制作误差与精度的保证有一定的较大的困难 性,因此应该选取最佳范围,结合实际加工 经行微调,从而最终达到理想的轨迹路线, 见图 6。
AUTOMOBILE DESIGN | 汽车设计
时代汽车
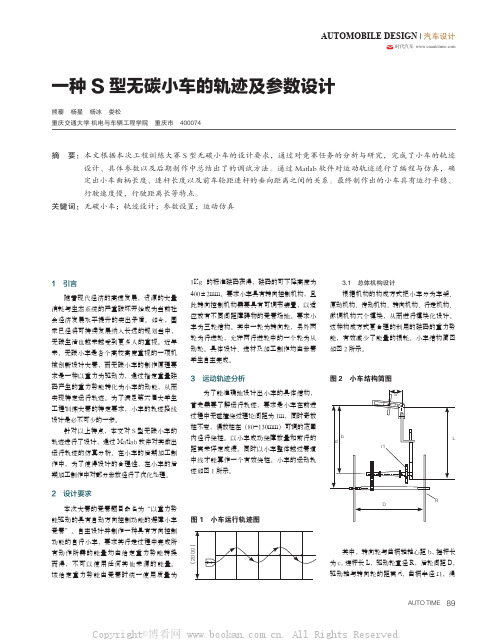
一种 S 型无碳小车的轨迹及参数设计
熊藜 杨星 杨冰 娄松 重庆交通大学 机电与车辆工程学院 重庆市 400074
摘 要:本文根据本次工程训练大赛 S 型无碳小车的设计要求,通过对竞赛任务的分析与研究,完成了小车的轨迹 设计、具体参数以及后期制作中总结出了的调试方法。通过 Matlab 软件对运动轨迹进行了编程与仿真,确 定出小车曲柄长度、连杆长度以及前车轮距连杆的垂向距离之间的关系。最终制作出的小车具有运行平稳、 行驶速度慢,行驶距离长等特点。
3.1 总体机构设计 根据机构的构成方式把小车分为车架、 原动机构、传动机构、转向机构、行走机构、 微调机构六个模块,从而进行模块化设计。 这种构成方式更合理的利用的砝码的重力势 能,有效减少了能量的损耗。小车结构简图 如图 2 所示。
图 2 小车结构简图ab dL来自r12 设计要求
本次大赛的竞赛题目命名为“以重力势 能驱动的具有自动方向控制功能的避障小车 竞赛”。自主设计并制作一种具有方向控制 功能的自行小车,要求其行走过程中完成所 有动作所需的能量均由给定重力势能转换 而 得, 不 可 以 使 用 任 何 其 他 来 源 的 能 量。 该给定重力势能由竞赛时统一使用质量为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无碳小车Matlab仿真程序及路径图1.仿真程序
clear
clc
tic
%符号定义
%重物下降的高度h
%驱动轴转过角度sd2
%驱动轴传动比i
%转向轮轴心距b
%转向杆的长c
%转向轮转过的角度af
%驱动轮半径R
%驱动轮A与转向轮横向偏距a1
%驱动轮B与转向轮横向偏距a2
%驱动轴与转向轮的距离d
%小车行驶的路程s
%小车x方向的位移x
%小车y方向的位移y
%轨迹曲率半径rou
%曲柄半径r1
%绳轮半径r2
%参数输入
n=1000;
h=linspace(0,0.4,n);
i1=0.5;
i2=1.05;
R=0.16;
%驱动轮A与转向轮横向偏距a1
a1=0.08;
%驱动轮B与转向轮横向偏距a2
a2=0.08;
%曲柄半径r1
r1=0.02;
%绳轮半径r2
r0=0.006;
%驱动轴与转向轮的距离d
d=0.2;
%连杆与转向轮的距离c
c=0.04;
%算法
g=-10;
sd0=h/r0;
sd1=sd0/i1;
sd2=sd0/i2;
af=atan(r1.*sin(sd2)/c);
format long
rou=a1+(d)./(tan(af));
s=sd1*R;
ds=s(2)-s(1);
dy=ds*cos(af);
dx=-ds*sin(af);
x=cumsum(dx);
y=cumsum(dy);
xb=x-(a1+a2).*cos(af);
yb=y-(a1+a2).*sin(af);
xc=x-a1*cos(af)-d*sin(af);
yc=y-a1*sin(af)+d*cos(af);
plot(x,y,'b',xb,yb,'b',xc,yc,'r'); hold on
grid on
for i=1:20
t=0:0.01:2*pi;
xy=0.01.*cos(t)-0.23;
yy=0.01.*sin(t)+i;
plot(xy,yy);
hold on
end
2.仿真路径。