轨道摆渡车的研发使用图纸
合集下载
轨检图纸分析及应用课件
向,向左为正; 车体垂向加速度:垂直于车体地板,向上为正。
7
六、地面标志
图纸上的地面标志对 于我们现场人员来说 作用就是找准超限里 程,减小对标误差。
目前轨检车检测出常 见的地面标志有公里 标、半公里标、道岔 标志、道口标志、桥 梁护轨标志等
8
9
10
七、波型的判读
“长度”是指该项目超过I级以上的长度,轨检车记录超限项目的长度是从该项目值 达到超过Ⅰ级开始,到其值回到Ⅰ级以下结束。其最大峰值达到Ⅱ级而低于Ⅲ级 时就判定该超限为Ⅱ级。Ⅲ级Ⅳ级的判定同理。
1663+069.23,尺量 距离后为
19mm×2.5m=47.5m m,则病害点里程为
1663+116.73m处
20
21
九、多波不平顺
多波不平顺,轨向、水平、复合不平顺危害: 多波不平顺、轨向、水平复合产生的加速度易 与车体固有频率叠加,引起车体谐振,危及行 车安全。下图为多波和轨向复合不平顺引起车 体加速度异常。
15
在设备综合图中找出与轨道动态检查图纸的里程,用轨道动态检查图纸 中的地面标志具体里程(如道岔、道口、桥梁、曲线头、尾等)于综合 图中显示的具体里程进行比对,以顺里程方向错前的为“+”,以顺里程 方向错后的为“-”,并将比对值记录在轨道动态检查图纸上。
16
1、利用曲线头尾,确定病害点里程
判定左高低里程
30
31
2、轨向超限查找:
先跨在钢轨上采用目测上股轨向,查找超限处所。 找出疑似病害处所后,再采用弦测线路轨向的方法,在该处的前后钢轨内侧拉10m长的弦线,
在顶面下16mm处测量轨头与弦线间的水平距离;确定超限处所。 曲线地段用20m弦测量曲线正矢,找出超限处所。
7
六、地面标志
图纸上的地面标志对 于我们现场人员来说 作用就是找准超限里 程,减小对标误差。
目前轨检车检测出常 见的地面标志有公里 标、半公里标、道岔 标志、道口标志、桥 梁护轨标志等
8
9
10
七、波型的判读
“长度”是指该项目超过I级以上的长度,轨检车记录超限项目的长度是从该项目值 达到超过Ⅰ级开始,到其值回到Ⅰ级以下结束。其最大峰值达到Ⅱ级而低于Ⅲ级 时就判定该超限为Ⅱ级。Ⅲ级Ⅳ级的判定同理。
1663+069.23,尺量 距离后为
19mm×2.5m=47.5m m,则病害点里程为
1663+116.73m处
20
21
九、多波不平顺
多波不平顺,轨向、水平、复合不平顺危害: 多波不平顺、轨向、水平复合产生的加速度易 与车体固有频率叠加,引起车体谐振,危及行 车安全。下图为多波和轨向复合不平顺引起车 体加速度异常。
15
在设备综合图中找出与轨道动态检查图纸的里程,用轨道动态检查图纸 中的地面标志具体里程(如道岔、道口、桥梁、曲线头、尾等)于综合 图中显示的具体里程进行比对,以顺里程方向错前的为“+”,以顺里程 方向错后的为“-”,并将比对值记录在轨道动态检查图纸上。
16
1、利用曲线头尾,确定病害点里程
判定左高低里程
30
31
2、轨向超限查找:
先跨在钢轨上采用目测上股轨向,查找超限处所。 找出疑似病害处所后,再采用弦测线路轨向的方法,在该处的前后钢轨内侧拉10m长的弦线,
在顶面下16mm处测量轨头与弦线间的水平距离;确定超限处所。 曲线地段用20m弦测量曲线正矢,找出超限处所。
摆渡车设计
9
工程案例分析
摆渡车主电路的设计分析
摆渡车的控制目标: 摆渡车左右运行的实现是通过电机的正反转实现;摆渡车 的速度变化是通过电机的调速实现。
从摆渡车的控制目标可以分析摆渡车主电路的设计要求: 1)摆渡车的主电路需要实现电机的正反转; 2)摆渡车需要在运行过程实现变速。
实现方案分析: A)需要使用变频器; B)思考:是否需要接触器; C)是否需要其他的保护装置?
17
工程案例分析
摆渡车控制功能的实现方案
摆渡车控制功能的分析 3)能够实现摆渡车的变速运行。 含义:摆渡车运行过程希望运行时间越短越好, 这样运行效率可以提高; 含义:摆渡车上有负载,起动时过快的速度可能 导致货物倒塌; 含义:摆渡车快速停车时有较大的惯性,不易停 准位置。 含义:起动时以中等速度、运行时以最高速度、 停止时以较低速度运行。
29
工程案例分析
摆渡车控制功能的实现分析
4)摆渡车目标位置的设定方式 A)摆渡车目标车道:车道1、车道2、···车道6; B)目标车道的设定方式:可以采用模拟量、数 字量、触摸屏等形式; C)任何时候只能有一个目标车道有效; D)在运行中目标车道不能改变。
那么,哪种模式比较可取呢?如何判断?
30
工程案例分析 摆渡车控制功能的实现分析
4)摆渡车目标位置的设定方式
每一个目标车道选择占用一个位地址。 不同目标车道的地址表达了车道之间的关系。
31
工程案例分析 摆渡车控制功能的实现分析
4)摆渡车目标位置的设定方式
城市轨道交通车辆构造教案ppt课件

13
第六节 车 门
图2-9 南京地铁1号线车门示意图
1)客室门的位置及编号如图2-9所示。 2)客室门技术参数见表2-4。 2.驾驶室侧门
14
第六节 车 门
表2-4 客室门技术参数
表2-5 驾驶室侧门技术参数
15
第六节 车 门
3.驾驶室隔间门
表2-6 驾驶室隔间门技术参数
16
第六节 车 门
4.逃生门
21
第六节 车 门
图2-12 紧急解锁装置 a)正常位 上、下导轨 上部导轨被安装在门头机构上,托架上的 滚柱沿导轨滚动。 2.驾驶室侧门的组成 3.驾驶室隔间门的组成
23
第六节 车 门
图2-14 驾驶室侧门的组成 1—铝制门板 2—上部玻璃窗 3—下部玻璃窗 4—门窗橡胶条 5—防水橡胶条 6—门框密封橡胶条
城市轨道交通车辆构造
第二章 车 体
1
第三节 不锈钢车体
一、不锈钢车体的结构
1.车顶
图2-5 天津滨海轻轨车辆车体模型
2
第三节 不锈钢车体
2.侧墙 3.端墙 4.底架 二、不锈钢材料使用中应注意的问题 1.不锈钢材料的合理选择 1)价格便宜、通用性高,容易购买。 2)耐腐蚀性好。 3)具有足够的强度。 4)加工性好,在对其进行剪切、弯曲、拉延、焊接等加工 时,不会产生缺陷。
表2-8 客室车门的开关的电平信号
25
第六节 车 门
1)开门。 2)关门。 (3)警告灯/蜂鸣器 在每扇客室车门的上方车体内外部各 装设有一个警告灯,开关门时警告灯将会亮并闪烁。 (4)障碍物探测 1)关门防夹(关门时的障碍物探测)。 2)开门时障碍物探测。
26
第六节 车 门
(5)车门切除 一旦运营中有车门开关故障时,驾驶员可以 通过用方孔钥匙将故障车门切除(切除开关有方向性,车 外切除应是逆时针,车内切除应是顺时针,否则会造成切 除机构损坏)。 (6)主隔离开关 在每扇门的驱机构上安装有一个主隔离开 关。 (7)紧急解锁 1)在速度低于1.8km/h或3km/h时操作紧急解锁装置将导致:
第六节 车 门
图2-9 南京地铁1号线车门示意图
1)客室门的位置及编号如图2-9所示。 2)客室门技术参数见表2-4。 2.驾驶室侧门
14
第六节 车 门
表2-4 客室门技术参数
表2-5 驾驶室侧门技术参数
15
第六节 车 门
3.驾驶室隔间门
表2-6 驾驶室隔间门技术参数
16
第六节 车 门
4.逃生门
21
第六节 车 门
图2-12 紧急解锁装置 a)正常位 上、下导轨 上部导轨被安装在门头机构上,托架上的 滚柱沿导轨滚动。 2.驾驶室侧门的组成 3.驾驶室隔间门的组成
23
第六节 车 门
图2-14 驾驶室侧门的组成 1—铝制门板 2—上部玻璃窗 3—下部玻璃窗 4—门窗橡胶条 5—防水橡胶条 6—门框密封橡胶条
城市轨道交通车辆构造
第二章 车 体
1
第三节 不锈钢车体
一、不锈钢车体的结构
1.车顶
图2-5 天津滨海轻轨车辆车体模型
2
第三节 不锈钢车体
2.侧墙 3.端墙 4.底架 二、不锈钢材料使用中应注意的问题 1.不锈钢材料的合理选择 1)价格便宜、通用性高,容易购买。 2)耐腐蚀性好。 3)具有足够的强度。 4)加工性好,在对其进行剪切、弯曲、拉延、焊接等加工 时,不会产生缺陷。
表2-8 客室车门的开关的电平信号
25
第六节 车 门
1)开门。 2)关门。 (3)警告灯/蜂鸣器 在每扇客室车门的上方车体内外部各 装设有一个警告灯,开关门时警告灯将会亮并闪烁。 (4)障碍物探测 1)关门防夹(关门时的障碍物探测)。 2)开门时障碍物探测。
26
第六节 车 门
(5)车门切除 一旦运营中有车门开关故障时,驾驶员可以 通过用方孔钥匙将故障车门切除(切除开关有方向性,车 外切除应是逆时针,车内切除应是顺时针,否则会造成切 除机构损坏)。 (6)主隔离开关 在每扇门的驱机构上安装有一个主隔离开 关。 (7)紧急解锁 1)在速度低于1.8km/h或3km/h时操作紧急解锁装置将导致:
城市轨道交通行车组织课件 7-1 全日列车运行方案图(粗图)编制

XC07 XC09
DC05
DC03
XC05
XC08
JD02
XC12 XC10
DC06 DC04 XC06
XC03 DC01
XC04 DC02
XC01 C-1
C站
C-2 XC02
XD01 D-1
D站
D-2 XD02
XE01 E 站
E-1
E-2
E站
XE02
XF05 F 站
F-1
DF01 XF03
F-2
F站
城市轨道交通行车组织
课题一 全日列车运行方案图(粗图)编制
上行出库 上行出库
下行出库 下行出库
上行入库
下行入库
下行入库
上行入库
城市轨道交通行车组织
课题一 全日列车运行方案图(粗图编制
8)首、末班车必须正点开行,运行图的均匀性是考核运营质量的一个重要指标。 9)早高峰结束后,A站和K站各保留一列备用车;A站的备用车作为末班车开行,C站晚高峰开 行的最后一列车开行至K站后接替之前的备用车;K站之前的备用车上正线运营后,作为接替的列车 一直保留至运行结束且于K站过夜,作为第二天早班车开行。
城市轨道交通行车组织
课题一 全日列车运行方案图(粗图)编制
10)车次号(即服务号及序列号的组合)按京州地铁《行车组织细则》编码,标注在运行线始 发车站的阳面上。
11)电动客车组的运行线须全部画成斜线且勾画出列车运行交路;进、出车辆段用箭头表示, 如图7-1所示,其它标注办法及颜色要求可参见京州地铁列车运行图的图例。
2)列车全部按长交路考虑,其周转时间为T周=56分钟(包含各站的停站时间及起停附加时间); 假定各站的站间距均相同,且上、下行运行时分也相同(不考虑区间线路的坡度和曲线半径对列车运 行的影响),列车在交路端点站的折返时间为4分钟。
城轨交通车辆构架、轮对与轴承轴箱装置

构架、轮对与轴承轴箱装置
图3-9 北京地铁10号线 车辆拖车用转向架构架
构架、轮对与轴承轴箱装置
1 构架
2.构架的分类
按制造工艺,构架分为铸钢和焊接构架两种形式,城轨车 辆一般采用焊接构架。一般焊接构架的梁为中空箱形,重量 轻,节省材料,又能满足强度和刚度的要求,应用比较广泛。
如图3-10所示,构架按结构形式有开口式、封闭式,或 形、“日”字形、“目”字形等,主要根据横梁的数目与位置 而定。其中,开口式、形、“日”字形形式最常见。
车轮; 2—车轴
构架、轮对与轴承轴箱装置
2 轮对与轴承轴箱装置
1.轮对
(1)车轴
图3-12和图3-13分别为城轨车辆拖车 车轴和动车车轴的结构,它们的主要区别 是动车车轴配有齿轮箱与齿轮座。
构架、轮对与轴承轴箱装置
图3-12 城轨车辆拖车车轴的结构 1—轴颈; 2—防尘板座; 3—轮座
城轨交通车辆
项目 构架、轮对与
轴承轴箱装置
构架、轮对与轴承轴箱装置
1 构架
1.构架基础知识
构架是转向架的骨架,用于安装转向架上的各类部件并传 递各种作用力。图3-9为北京地铁10号线车辆拖车用转向架构 架。由图可知,构架主要由左、右侧梁,一根或几根横梁及前 后端梁组焊而成。构架上还设有空气弹簧座、中心座安装座、 轴箱吊框、电机安装座、齿轮箱吊座、制动吊座、牵引拉杆安 装座、高度控制阀座、抗侧滚扭杆座、减振器座、止挡等,用 于安装相关设备。
构架、轮对与轴承轴箱装置
图3-17 装ATP测速电机的轴箱
构架、轮对与轴承轴箱装置
2 轮对与轴承轴箱装置
2.轴承轴箱装置
(1)轴箱装置的基础知识
③轴承轴箱装置的作用。轴承轴箱装置将轮对 和构架联系在一起,使轮对沿钢轨的滚动转化为车 体沿轨道的直线运动,并把车辆的重量以及各种载 荷传递给轮对。
悬挂运输设备轨道节点标准图NGDJ3
I
II
II
I-I II-II
8,10吨悬挂葫芦轨道节点详图 The detail drawing of track joint
for 8t & 10t hanger block
编号 NO. 页/Page
NGDJ3 7
I
I
I-I
15吨悬挂葫芦轨道节点详图 The detail drawing of track joint
编号 NO.
页/Page
NGDJ3 10
5、当轨道顶离开混凝土梁底的距离20<H≤1500时,可按节点"E"进行施工。 6、轨道伸缩缝,仅在建筑物伸缩缝处设置。
7、本图集未考虑侵蚀性气体及较大温度对节点的影响。 8、X-N
节点号1、2、3 ……
A (与中间梁连接节点) B (与伸缩缝处连接节点) C (与端部梁连接节点) D1或D2 (与端部山墙连接节点) E (节点吊板放长的节点)
受剪螺栓相应钢管 允许型钢螺孔准距及直径表
说 明(二) Specification (2)
编号 NO.
页/Page
NGDJ3 2
I I
II
II
I-I II-II
0.5,1吨 悬挂葫芦轨道节 点详图
The detail drawing of track joint for 0.5t & 1t hanger block
编号 NO. 页/Page
NGDJ3 3
I I
II
II
I-I II-II
2吨悬挂葫芦轨道节点详图
The detail drawing of track joint for 2t hanger block
自动寻轨机器车.pdf
检测距离 D (cm)
输出
黑色
电压
Vb
5 4 3 2.5 2 1.5 1 0.5 0.2 4.47 4.47 4.47 4.48 4.0 4.2 4.1 3.4 3.2
Vout (V) 白 色 1.2 0.4 0.2 0.2 0.2 0.2 0.2 0.6 1.9
Vw
Vb---Vw (V)
3.27 4.07 4.27 4.28 3.8 4.0 3.9 2.8 1.3
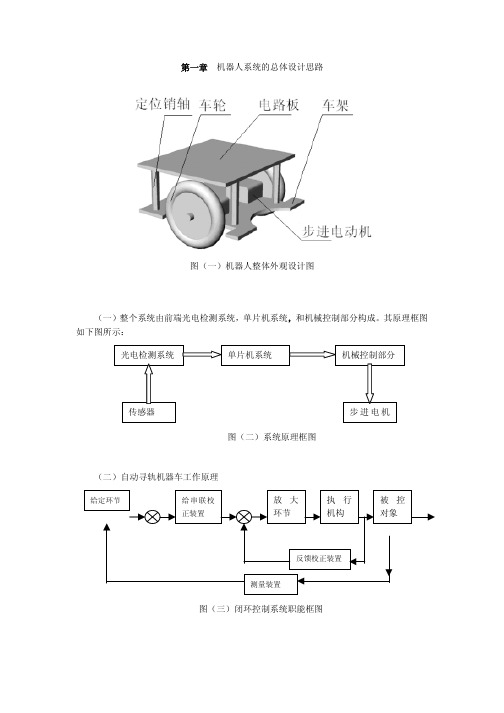
在小车的前后,左、右放置有四个反射式光电检测器,用于实时地检测小车当前的位置 是否已经偏离了预定轨迹,并产生相应的电压信号,经过比较器电路,处理后的高低电压信 号被输入到单片机 CPU 中,单片机对光电传感器采集的数据进行处理,并调用相应的子程序 处理。单片机通过端口输出相应的高低电平控制步进电机的运动,从而改变小车的位置,达 到了反馈控制的目的。
μs
-
5
-
μs
注:集电极亮电流 IL、饱和压降 VCE、电流比、响应时间是在红外光电传感器前端面与亮 检测面距离 5-10mm 处测得,其数值受亮检测面的表面光洁度及平整度影响。 一、ST-188 传感器特点 1. 采用高发射功率红外光电二极管和高灵敏度光电晶体管组成。 2. 检测距离可调整范围大,近距离 5-10mm 可用。
图(四)机器人小车结构图
第二章 机器人单片机的型号及相关参数 §4.1 单片机型号的选择 一、AT89C51 单片机简介 AT89C51 引脚图如下
AT89C51 是一种低功耗、高性能的片内含有 8KB 快闪可编程/擦除只读存储器(FPEROM ——FLASH PROGRAMMABLE AND ERASABLE READ ONLY MEMORY)的 8 位 CMOS 微控制器,使用 高密度、非易失存储技术制造,并且与 80C31 引脚和指令系统完全兼容。芯片上的 FPEROM 允许在线编程或采用通用的非易失存储编程器对程序存储器重复编程。
城市轨道交通车辆构造PPT课件(共8单元)项目4 城轨车辆转向架
(a)具有双排球形转盘的铰接转向架
(b)具有球心盘的铰接转向架
图4-6 铰接式转向架
1.3 转向架的类型
3)按车体与转向架的连接装置分类
(c)TGV高速列车式铰接转向架
图4-6 铰接式转向架
1.4 转向架的主要技术参数
转向架的主要技术参数直接决定了车辆的稳定性和车辆的乘坐舒适性,包括轨距、轴距、转 向架中心距、车轮直径、轴重、轮对内侧距、车轮踏面等。各转向架因其设计要求不同,技术参 数也不尽相同。表4-1为某转向架的主要技术参数。
2)按轴箱定位方式分类
图4-5 层叠式橡胶弹簧定位(b)锥形层叠橡胶弹簧定位
1.3 转向架的类型
3)按车体与转向架的连接装置分类
按车体与转向架的连接装置不同,转向架可分为有心盘(或有中心销)转向架、无心盘(或 无中心销)转向架和铰接式转向架。铰接式转向架又可分为具有双排球形转盘的铰接转向架、具 有球心盘的铰接转向架和TGV高速列车式铰接转向架,如图4-6所示。地铁车辆常采用有心盘转 向架,而轻轨车辆常采用铰接式转向架。
(3)转臂式定位:又称弹性铰定位,转臂的一端通过螺栓与轴箱固接,另一端通过橡胶节 点与构架连接。橡胶节点由弹性橡胶套、金属外套等组成,其允许轴箱和构架在上、下方向上有 较大的位移,在纵、横方向上有适宜的刚度,从而实现良好的弹性定位,如图4-4(c)所示。
图4-4 不同的轴箱定位方式(c)
1.3 转向架的类型
3.1 轮对装置
轮对是指由一根车轴和两根同型号 的车轮通过过盈配合组装而成的装置,如 图4-10所示。轮对在组装过程中采用了 冷压或热套工艺,以使车轮和车轴牢固地 结合在一起,避免轮对在使用过程中出现 脱落现象。
3.1 轮对装置
车辆轮对 设计要求
相关主题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
优势
操作简单,选用箱型梁结构,成本费用低,可根据需求添加排线器和导线装
置,实现人性化设计。平车可实现软启动,避免普通车型的急刹车,最大程度的
保护运送工件和操作人员的安全。表面油漆标准:设备内所有的钢结构、机械设
备及零部件均作防腐处理。制造钢结构的板材和型材要进行物理、化学处理。我
公司电动平车钢结构采用 GB/T5117 中 E4303 焊条焊接,立柱上的所有焊缝进
运 行 速 度 0-20
减速机采用硬齿
(m/min)
面减速机
续航里程(Km) 5.5
运行长度
50
最大轮压(KN) 174参Leabharlann 重量7.8交货期(天)
30
荐用道轨型号 P43
非标定制:1、载重量、台面尺寸 2、平车部件均可由客户指定
行探伤检验
车体框架进行时效处理以消除内应力。
技术参数表
平车型号 KPJ-50T 备注
额定载重量(t) 50
台面尺寸(mm) 5500*2500*700 车 架 部 分 全 部 为
钢板焊接而成,梁
式结构
轮距(mm)
4200
轨内侧距(mm) 1435
车轮直径(mm) Ф500
轴承为洛阳轴承
厂
车轮数量
4
离地间隙(mm) 50
1、电动平车钢结构采用箱梁结构
2、该系列电动平车承载能力强
3、该系列电动平车台面平整度较高
4、电动平车可两台车同步运行功能
电机
1、三相电机的防护等级为:IP44
2、三相电机为软启动电机
减速机
1、减速机的齿轮传动平稳
2、减速机采用 FLENDER
车轮
1、车轮的材质为:ZG55
2、车轮的表面硬度达到:HB320-380
轨道摆渡车成本比较低,操作安全方便,能有效解决生产车间因布局限制而 导致物料运输难题。此种也是在给客户解决运输难题的情况下研发出来的。因此, 广大客户在咨询轨道摆渡车的时候,尽管说出您的要求,我们将会用我们精心的 服务来让您满意。 选型参考
适合于任意吨位工件搬运,运输距离不超过 200m、工作时间不受限制的使 用场合。 频繁使用、中长距离运输、载重吨位为任意吨位的工厂车间内使用的 工作环境。 电缆卷筒供电电动平车操作系统为低压 36V 电源控制,由于机构简 单,成本也较低,是车间过跨较常见的轨道平车,对于运行距离可超过 50 米, 需要增加排线器来辅助卷线,最大运行距离可满足 200 米。 电缆卷筒分为:弹 簧驱动式电缆卷筒和电机驱动式电缆卷筒。 弹簧驱动式电缆卷筒用于控制电缆 的卷起和放出,主要用于起重机,堆垛装置或废水处理技术等场合 详细部件描述 总体
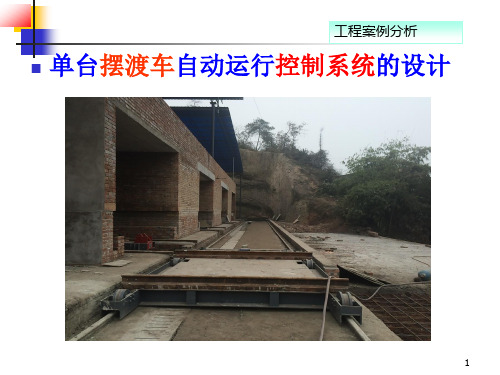
轨道摆渡车的研发使用图纸
轨道摆渡车是车间轨道平车的一种,简易原理是在横向运行的百分百电动平 车上方焊接有轨道连接,能够在底层百分百电动平车运行时,当底层平车上方轨 道与地面轨道对接时,上方电动平车可直接脱离底层百分百电动平车直接运行至 车间后重新回到底层电动平车上方继续运行可直接运行至多厂方车间同时使用, 因此也可称作横向移位转轨百分百电动平车,详情可以咨询:新乡市百分百机电 有限公司。
轨道摆渡车采用的是滑触线供电,在轨道上行驶,而且其台面上也铺设有轨 道,供其摆渡的电动转运车行驶,它的运行方向和所要摆渡的轨道平板车的运行 方向是十字交叉的。轨道摆渡车因其作用特点,一般是在地坑里行驶,其台面是 和地面平齐,台车行驶到一定位置,台面上的轨道和地面上的轨道能够准确对接, 相当于一个移动台面。台车一端设计随车操作平台,这样操作人员可以随车控制 任一台轨道平车,节省人力资源。