第4章 嵌入式软件基础实验
嵌入式实验四实验报告
嵌入式实验四实验报告实验四:嵌入式编程设计
实验设计目的:
1. 学习使用嵌入式开发工具进行编程设计;
2. 学习使用C语言编写嵌入式程序;
3. 学习使用GPIO模块进行输入输出;
4. 学习使用中断处理函数。
实验器材:
1. 嵌入式开发板;
2. USB数据线;
3. 电脑;
4. LED灯;
5. 电阻;
6. 蜂鸣器;
7. 其他必要的电路元件。
实验步骤:
1. 连接开发板和计算机,安装开发板驱动程序;
2. 打开嵌入式开发工具,创建一个新的工程;
3. 在工程中添加一个C文件,编写程序;
4. 编写程序实现以下功能:
- 使用GPIO模块控制LED灯的亮、灭;
- 使用GPIO模块读取按键状态;
- 使用GPIO模块控制蜂鸣器的开、关;
- 使用Timer模块计时;
- 使用中断处理函数处理外部中断;
- 其他必要的功能;
5. 编译程序,下载到开发板;
6. 运行程序,测试功能是否正常。
实验结果与分析:
实验结果应当是LED灯、蜂鸣器、按键正常工作,可以通过按键控制LED灯的亮、灭、蜂鸣器的开、关。
实验总结:
通过本次实验,我学会了使用嵌入式开发工具进行编程设计,掌握了使用C语言编写
嵌入式程序的方法。
通过实验,我深入理解了嵌入式系统的原理和实现方法,对嵌入
式系统的应用有了更加深入的了解。
在今后的学习和工作中,我将能够更好地运用嵌
入式技术解决实际问题。
第4章 嵌入式软件基础实验共83页

图4-2 ULINK2仿真器
ULINK2的主要功能如下: (1)下载目标程序; (2)检查内存和寄存器; (3)片上调试,整个程序的单步执行; (4)插入多个断点; (5)运行实时程序; (6)对Flash存储器进行编程。
ULINK2的新特点包括: (1)标准Windows USB驱动支持,也就 是ULINK2即插即用; (2)支持基于ARM Cortex-M3的串行线 调试; (3)支持程序运行期间的存储器读写、 终端仿真和串行调试输出; (4)支持10/20针连接器。
图4-12 选择Flash编程算法
4.调试设置
Vision 3调试器提供了两种调试模式, 可以从Project→Options for Target对话框 的Debug页内进行选择,如图4-13所示。
图4-13 调试器的选择
图4-14 选择ULINK USB-JTAG仿真器调试
图4-15 读取设备ID
图4-1 MDK开发工具的组件
4.2 ULINK2仿真器简介
ULINK是Keil公司提供的USB-JTAG接口仿 真器,目前最新的版本是2.0。它支持诸多芯 片厂商的8051、ARM7、ARM9、Cortex-M3、 Infineon C16x、Infineon XC16x、 InfineonXC8xx、STMicroelectronics PSD 等多个系列的处理器。
图4-25 选择CPU
(3)添加启动代码。
图4-26 添加启动代码
(4)选择开发工具。
图4-27 选Байду номын сангаас开发工具
(5)建立源文件。 (6)添加源文件。
图4-28 添加源文件
(7)工程配置。
图4-29 基本配置Target
嵌入式技术及应用实验报告
嵌入式技术及应用实验报告嵌入式技术及应用实验报告一、实验目的本实验旨在通过学习嵌入式技术及应用,掌握嵌入式系统的基本原理和应用方法,培养学生的嵌入式系统设计和开发能力。
二、实验内容1. 嵌入式系统的概念和特点2. 嵌入式系统的硬件平台和软件开发环境3. 嵌入式系统的应用案例分析4. 嵌入式系统的设计和开发实践三、实验原理1. 嵌入式系统的概念和特点嵌入式系统是一种专门设计用于特定应用领域的计算机系统,它通常由硬件和软件两部分组成。
嵌入式系统的特点包括:实时性要求高、资源受限、功耗低、体积小、成本低等。
2. 嵌入式系统的硬件平台和软件开发环境嵌入式系统的硬件平台通常由处理器、存储器、输入输出设备等组成。
常用的处理器有ARM、MIPS等,存储器包括RAM、ROM、Flash等,输入输出设备有键盘、显示器、传感器等。
嵌入式系统的软件开发环境包括编译器、调试器、仿真器等工具。
3. 嵌入式系统的应用案例分析嵌入式系统广泛应用于各个领域,如智能手机、汽车电子、医疗设备、工业控制等。
以智能手机为例,它是一种集成了通信、计算、娱乐等功能的嵌入式系统,通过操作系统和应用软件实现各种功能。
4. 嵌入式系统的设计和开发实践嵌入式系统的设计和开发包括硬件设计和软件开发两个方面。
硬件设计主要包括电路设计、PCB设计等,软件开发主要包括驱动程序开发、应用程序开发等。
在设计和开发过程中,需要考虑系统的性能、可靠性、安全性等因素。
四、实验步骤1. 学习嵌入式系统的概念和特点,了解嵌入式系统的基本原理。
2. 学习嵌入式系统的硬件平台和软件开发环境,掌握常用的处理器、存储器和输入输出设备。
3. 分析嵌入式系统的应用案例,了解不同领域的嵌入式系统的设计和开发方法。
4. 进行嵌入式系统的设计和开发实践,包括硬件设计和软件开发两个方面。
5. 调试和测试嵌入式系统,验证系统的功能和性能。
6. 总结实验结果,撰写实验报告。
五、实验结果与分析通过本次实验,我对嵌入式系统的概念和特点有了更深入的了解。
《嵌入式软件设计》实验报告-动态库和静态库的制作和使用

host_serial host_serial.c Makefile serial.c serial.h
(1)将串口设置文件serial.c单独封装成动态库。
(2)参考Makefile,使用动态库编译生成host_serial应用程序,验证动态库的正确性
(3)将串口设置文件单独封装成静态库。
(4)参考Makefile,使用静态库编译生成host_serial应用程序,验证动态库的正确性
四、实验结果与数据处理
五、分析与讨论
1.如果制作好的动态库不拷贝到/usr/lib,而是放在当前目录,这种情况下怎样使用该动态库?
2.如何在目标机使用动态、静态库?
六、教师评语
签名:
日:
成绩
《嵌入式系统软件设计》实验报告
实验序号:01实验项目名称:动态库和静态库的制作和使用
学 号
姓 名
专业、班
实验地点
指导教师
实验时间
一、实验目的
1.熟悉linux的编译方法
2.掌握动态库、静态库的制作和使用。
二、实验设备(环境)及要求
硬件:PC机;PXA270试验箱
软件:PC机操作系统linux
三、实验内容与步骤
嵌入式实习报告(共5篇)
嵌入式实习报告(共5篇)第一篇:嵌入式实习报告一、嵌入式系统开发与应用概述在今日,嵌入式ARM 技术已经成为了一门比较热门的学科,无论是在电子类的什么领域,你都可以看到嵌入式ARM 的影子。
如果你还停留在单片机级别的学习,那么实际上你已经落下时代脚步了,ARM 嵌入式技术正以几何的倍数高速发展,它几乎渗透到了几乎你所想到的领域。
本章节就是将你领入ARM 的学习大门,开始嵌入式开发之旅。
以嵌入式计算机为技术核心的嵌入式系统是继网络技术之后,又一个IT领域新的技术发展方向。
由于嵌入式系统具有体积小、性能强、功耗低、可靠性高以及面向行业具体应用等突出特征,目前已经广泛地应用于军事国防、消费电子、信息家电、网络通信、工业控制等各个领域。
嵌入式的广泛应用可以说是无所不在。
嵌入式微处理器技术的基础是通用计算机技术。
现在许多嵌入式处理器也是从早期的PC 机的应用发展演化过来的,如早期PC 诸如TRS-80、Apple II 和所用的Z80 和6502 处理器,至今仍为低端的嵌入式应用。
在应用中,嵌入式微处理器具有体积小、重量轻、成本低、可靠性高的优点。
嵌入式处理器目前主要有Am186/88、386EX、SC-400、Power PC、68000、MIPS、ARM 等系列。
在早期实际的嵌入式应用中,芯片选择时往往以某一种微处理器内核为核心,在芯片内部集成必要的ROM/EPROM/Flash/EEPROM、SRAM、接口总线及总线控制逻辑、定时/计数器、WatchDog、I/O、串行口、脉宽调制输出、A/D、D/A 等各种必要的功能和外设。
二、实习设备硬件:Embest EduKit-IV实验平台、ULINK2仿真器套件、PC机软件:μVision IDE for ARM集成开发环境、Windows 98/2000/NT/XP三、实习目的1.初步掌握液晶屏的使用及其电路设计方法;掌握S3C2410X处理器的LCD控制器的使用;掌握通过任务调用的方法把液晶显示函数添加到uC/OS-II中;通过实验掌握液晶显示文本及图形的方法与程序设计。
嵌入式实验报告
目录嵌入式系统实践实验报告1(使用GCC编译C语言程序) (1)嵌入式系统实践实验报告2(Linux 中通过minicom串口下载程序) (14)嵌入式系统实践实验报告1五、实验结果与分析(含程序、数据记录及分析和实验总结等):图5-1 实验结果截图1图5-2 实验结果截图2图5-3 实验结果截图3 图5-4 实验结果截图4图5-5 实验结果截图5 图5-6 实验结果截图6图5-7 实验结果截图7 图5-8 实验结果截图8图5-9 实验结果截图9图5-10 实验结果截图10本次实验按照实验步骤进行,完全符合实验要求,达到了实验预期。
嵌入式系统实践实验报告2二、实验环境:硬件:Mini6410嵌入式实验平台。
软件:PC机操作系统CentOS+Minicom+Arm-Linux 交叉编译环境。
图2-1 嵌入式开发板顶视图四、实验步骤:1.建立工作目录图4-1此时我们新建的hello工作目录,在home目录下,已出现,说明,我们此次操作成功(这里我们要注意,记清楚自己在创建目录时,所在的位置),如下图所示:图4-2编写程序源代码在Linux 下的文本编辑器有许多,常用的是vi 和Xwindow界面下的gedit 等,我们在开发过程中推荐使用vi。
hello.c 源代码较简单,如下:/*****hello.c*****/#include <stdio.h>int main(){printf("Hello,World!\n");return0;}我们可以是用下面的命令来编写hello.c 的源代码,进入hello 目录使用vi 命令来编辑代码(如果不会使用vi命令来编辑,我们也可以使用gedit命令来编辑hello.c文件,命令为:gedithello.c)vi命令中常用命令有: esc i :wq :q!图4-3按“i”或者“a”进入编辑模式,将上面的代码录入进去,完成后按Esc 键进入命令状态,再用命令“:wq”保存并退出。
嵌入式基础制作实训报告
一、引言随着物联网、智能家居等领域的快速发展,嵌入式系统在各个行业中的应用越来越广泛。
为了提高学生的实践能力和创新能力,我们开展了嵌入式基础制作实训。
本次实训旨在使学生掌握嵌入式系统的基本原理、硬件设计、软件开发等方面的知识,培养学生的动手能力和团队协作精神。
二、实训目的1. 熟悉嵌入式系统的基本原理和组成;2. 掌握嵌入式系统硬件设计方法,包括电路设计、PCB设计等;3. 掌握嵌入式系统软件开发方法,包括C语言编程、操作系统应用等;4. 培养学生的动手能力和团队协作精神;5. 提高学生对嵌入式系统领域的兴趣和认知。
三、实训内容1. 嵌入式系统基本原理及组成实训过程中,我们首先学习了嵌入式系统的基本原理和组成。
通过学习,我们了解到嵌入式系统由硬件和软件两部分组成。
硬件主要包括微控制器、存储器、输入输出设备等;软件主要包括操作系统、驱动程序、应用程序等。
2. 嵌入式系统硬件设计在硬件设计方面,我们学习了电路设计、PCB设计等知识。
首先,我们学习了电子元件的基本原理和特性,然后根据实际需求设计电路图。
在设计过程中,我们注重电路的稳定性和可靠性,同时考虑电路的功耗和成本。
设计完成后,我们使用Altium Designer等软件进行PCB设计,并制作出实物电路板。
3. 嵌入式系统软件开发在软件开发方面,我们学习了C语言编程、操作系统应用等知识。
首先,我们学习了C语言的基本语法和数据结构,然后通过编写简单的程序,掌握C语言编程技巧。
接着,我们学习了嵌入式操作系统的基本原理和应用,例如Linux、FreeRTOS等。
在实际开发过程中,我们根据需求编写应用程序,并使用操作系统提供的API进行开发。
4. 团队协作在实训过程中,我们以小组为单位进行项目开发。
每个小组成员负责不同的任务,如硬件设计、软件开发等。
在项目开发过程中,我们通过讨论、分工、协作,共同完成项目。
这种团队协作方式提高了我们的沟通能力和团队协作精神。
嵌入式ADS实验指导书
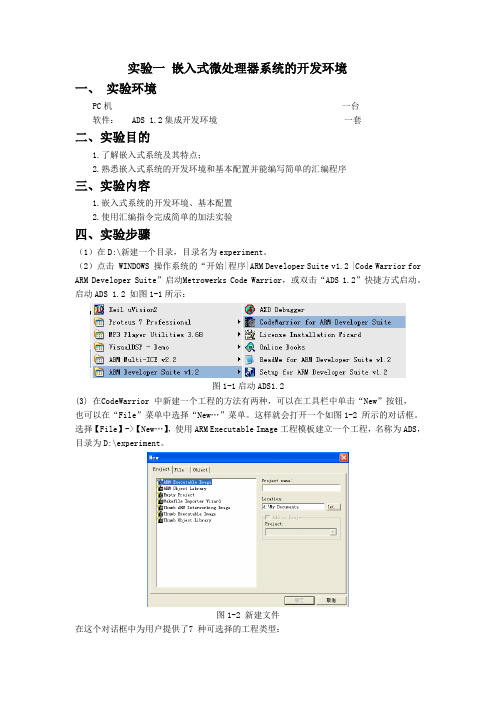
实验一嵌入式微处理器系统的开发环境一、实验环境PC机一台软件: ADS 1.2集成开发环境一套二、实验目的1.了解嵌入式系统及其特点;2.熟悉嵌入式系统的开发环境和基本配置并能编写简单的汇编程序三、实验内容1.嵌入式系统的开发环境、基本配置2.使用汇编指令完成简单的加法实验四、实验步骤(1)在D:\新建一个目录,目录名为experiment。
(2)点击 WINDOWS 操作系统的“开始|程序|ARM Developer Suite v1.2 |Code Warrior for ARM Developer Suite”启动Metrowerks Code Warrior,或双击“ADS 1.2”快捷方式启动。
启动ADS 1.2 如图1-1所示:图1-1启动ADS1.2(3) 在CodeWarrior 中新建一个工程的方法有两种,可以在工具栏中单击“New”按钮,也可以在“File”菜单中选择“New…”菜单。
这样就会打开一个如图1-2 所示的对话框。
选择【File】->【New…】,使用ARM Executable Image工程模板建立一个工程,名称为ADS,目录为D:\experiment。
图1-2 新建文件在这个对话框中为用户提供了7 种可选择的工程类型:1)ARM Executabl Image:用于由ARM 指令的代码生成一个ELF 格式的可执行映像文件;2)ARM Object Library:用于由ARM 指令的代码生成一个armar 格式的目标文件库;3)Empty Project:用于创建一个不包含任何库或源文件的工程;4)Make Wizard:用于将Visual C 的nmake 或GNU make 文件转入到CodeWarrior IDE 工程文件;5)Thumb ARM Executable Image:用于由ARM 指令和Thumb 指令的混和代码生成一个可执行的ELF 格式的映像文件;6)Thumb Executable image:用于由Thumb 指令创建一个可执行的ELF 格式的映像文件;7)Thumb Object Library:用于由Thumb 指令的代码生成一个armar 格式的目标文件库。
嵌入式实验报告
实验一 ARM汇编语言程序设计一、实验目的1.了解IAR Embedded Workbench 集成开发环境2.掌握ARM汇编指令程序的设计及调试二、实验设备1.PC操作系统WIN98或WIN2000或WINXP,ADSI.2集成开发环境,仿真驱动程序三、实验内容1.熟悉IAR Embedded Workbench 集成开发环境2.理解下列程序,新建工程,加入下面的程序,并观察实验结果,解释程序实现的功能分析:该程序实现的功能是程序功能:Y = A*B+C*D+E*F程序代码:AREA Examl, CODE,READONLY ;定义一个代码段ENTRY ;程序入口MOV R0,#0;设置R0寄存器的值为0MOV R8,#0;设置R8寄存器的值为0ADR R2,N;将R2寄存器的值设为数据域N的地址LDR R1,[R2];将以R2的值为地址的数据读入R1MOV R2,#0;设置R2的值为0ADR R3,C; 将R3寄存器的值设为数据域C的地址ADR R5,X; 将R5寄存器的值设为数据域X的地址LOOPLDR R4,[R3,R8];将R3+R8的数据读入R4LDR R6,[R5,R8];将R5+R8的数据读入R6MUL R9,R4,R6;R9 = R4*R6ADD R2,R2,R9;R2 = R2+R9ADD R8,R8,#4;R8 = R8+4ADD R0,R0,#1;R0 = R0+1CMP R0,R1;比较R0和R1的值BLT LOOP;R0<R1的话执行循环N DCD 0X03;C DCD 0X01,0X02,0X03,0X04,0X05,0X06;X DCD 0X01,0X02,0X03,0X04,0X05,0X06;END程序结果:各个寄存器的结果执行结果如下:3.实现1+2+3+4+····+100,求的值,并保存在地址0x90018的地址里面程序代码:MOV R0,#100;设置R0寄存器的值为100LDR R2,=0X90018;设置R2寄存器指向地址0x90018MOV R1,#0;设置R1的值为0MOV R3,#0;设置R3的值为0LOOPADD R3,R3,R0;R3 = R3+R0SUB R0,R0,#1;R0 = R0-1CMP R0,R1;将R0和R1的值比较BNE LOOP;不相等的话继续执行循环STR R3,[R2];将R3的值装入到R2指向的地址块中。
嵌入式教学实践案例(3篇)

第1篇一、案例背景随着科技的飞速发展,嵌入式系统在各个领域得到了广泛应用。
嵌入式系统涉及计算机科学、电子工程、自动化等多个学科,具有实践性强、技术更新快等特点。
为了提高学生的嵌入式系统设计能力和实际操作能力,我国高校纷纷开展了嵌入式教学实践。
本文以某高校嵌入式教学实践为例,探讨嵌入式教学实践的有效方法。
二、教学目标1. 使学生掌握嵌入式系统基本原理和设计方法;2. 培养学生动手实践能力和创新意识;3. 提高学生团队协作和沟通能力;4. 为学生未来从事嵌入式系统相关工作奠定基础。
三、教学实践内容1. 嵌入式系统概述(1)嵌入式系统定义及特点;(2)嵌入式系统发展历程;(3)嵌入式系统分类;(4)嵌入式系统应用领域。
2. 嵌入式处理器与硬件平台(1)ARM架构概述;(2)ARM处理器核心技术;(3)常用ARM处理器型号及特点;(4)硬件平台搭建与调试。
3. 嵌入式软件开发(1)嵌入式操作系统概述;(2)Linux操作系统原理与应用;(3)嵌入式C语言编程;(4)驱动程序开发。
4. 嵌入式系统设计实践(1)嵌入式系统设计流程;(2)项目选题与需求分析;(3)硬件电路设计与仿真;(4)软件编程与调试;(5)系统集成与测试。
四、教学实践方法1. 理论与实践相结合在教学过程中,注重理论知识与实际操作相结合,使学生能够在理论指导下进行实践,提高实践能力。
2. 项目驱动教学以项目为驱动,将教学内容融入项目中,让学生在实践中掌握知识,培养团队协作和沟通能力。
3. 多媒体教学运用多媒体技术,如PPT、视频等,丰富教学内容,提高学生的学习兴趣。
4. 案例教学通过分析实际嵌入式系统案例,让学生了解嵌入式系统在实际应用中的问题与解决方案。
5. 讨论式教学鼓励学生积极参与课堂讨论,激发学生的思维,提高课堂氛围。
五、教学实践效果1. 学生对嵌入式系统的理解更加深入,掌握了嵌入式系统基本原理和设计方法;2. 学生的动手实践能力和创新意识得到显著提高;3. 学生在团队协作和沟通方面取得明显进步;4. 学生对嵌入式系统相关岗位的就业竞争力得到提升。
嵌入式系统基础实验报告
本科实验报告课程名称:嵌入式系统基础实验项目:实验一双字节加法实验二数据排序程序实验三定时/计数器实验四外部中断实验地点:跨越机房专业班级:通信0903 学号:2009001385 学生姓名:指导教师:武娟萍2012年 5 月18 日实验一双字节加法一实验目的(1)熟悉MCS-51指令系统,掌握程序设计方法。
(2)掌握双字节加法的程序算法。
二实验设备计算机一台。
操作系统:Windows 98/2000/XP应用软件:WAVE 6000或其他。
三实验内容编写并调试一个双字节加法程序,设9930H存在R1R0中,6083H存在R2R3中,计算R1R0+R3R2,结果存在R5R4中。
四实验原理两数的低位相加后保留进位位,高位数相加时,将低位的进位加上。
五WAVE6000操作过程一、新建文件:选择菜单【文件/新建文件】功能,出现一个文件名为NONAME1的源程序窗口,在此窗口中输入编好的程序。
二、保存文件:输完程序后,选择菜单【文件/保存文件】或【文件/另存为】功能,给出文件要保存的位置保存文件,保存文件为MY.ASM。
三、新建项目选择菜单【文件/新建项目】功能,1)加入模块文件,选择刚才保存的文件,按打开键,可以打开多个文件2) 加入包含文件,选择所要加入的包含文件,如果没有包含文件,按取消键3)保存项目为MY,无需后缀。
将用户项目存盘,用户在编译项目时,自动存盘。
注意:当用项目仿真时,系统要求,项目文件,模块文件包含文件在同一个目录(文件夹)下五、项目复制复制项目,用户可以将项目中的所有模块(用户程序)备份到另一个地方。
在多模块项目中,用复制项目功能,可以避免用户因少复制某些模块,而造成编译不能通过,方便用户对程序进行管理六、项目设置选择菜单【设置/仿真器设置】,在仿真器设置栏中1)点击语言栏选择伟福汇编器。
2)仿真器选择栏选择80313)通信设置选择使用伟福软件模拟器七、编译程序:选择菜单【项目/编译】功能编译项目。
基于STM32的嵌入式软件开发基础-实验指导书(经典)

基于STM32的嵌⼊式软件开发基础-实验指导书(经典)实验⼀基于STM32的嵌⼊式软件开发基础实验⼀、实验⽬的1 、掌握嵌⼊式软件开发流程2 、学会使⽤嵌⼊式软件开发⼯具3 、学会使⽤⽆限循环架构开发简单的嵌⼊式应⽤程序4 、学会使⽤单步⁄全速运⾏、设置断点和观察变量⁄寄存器等⽅法调试嵌⼊式应⽤程序5 、掌握通⽤数字输⼊输出(GPIO)和系统定时器(SysTick)的软件开发⽅法6 、理解发光⼆极管(LED)和按键(Push Button)的驱动原理7 、掌握常⽤的延时(Delay)实现技巧⼆、实验环境1 、硬件:ALIENTEK STM32F103嵌⼊式开发板2 、软件:REALVIEW MDK或IAR EWARM三、实验内容1 、LED点亮实验:使⽤GPIO的相关知识,设计基于⽆限循环架构的嵌⼊式应⽤程序,点亮开发板上绿⾊LED和红⾊LED;2 、流⽔灯实验⼀:使⽤GPIO和延时循环,设计基于⽆限循环架构的嵌⼊式应⽤程序,使开发板上的绿⾊LED和红⾊LED先后轮流闪烁;3 、按键控制LED实验:使⽤GPIO的相关知识,设计基于⽆限循环架构的嵌⼊式应⽤程序,实现以下功能:1 )当按下WK_UP按键时,开发板上的绿⾊LED点亮;当释放WK_UP按键时,开发板上的绿⾊LED熄灭;2 )当按下KEY1按键时,开发板上的红⾊LED点亮;当释放KEY1按键时,开发板上的红⾊LED熄灭;3 )当同时按下WK_UP和KEY1按键时,开发板上的红⾊LED和黄⾊LED同时点亮;当同时释放WK_UP和KEY1按键时,开发板上的红⾊LED和黄⾊LED同时熄灭;4 、流⽔灯实验⼆:使⽤GPIO和SysTick的相关知识,设计基于⽆限循环架构的嵌⼊式应⽤程序,使开发板上的绿⾊LED和红⾊LED先后轮流闪烁,每个LED点亮和熄灭的时间各为1s,并在程序中定义⼀个8位⽆符号变量来记录红⾊LED闪烁的次数;调试程序,在REALVIEW MDK或IAR EWARM的调试界⾯中,通过在程序中设置断点,并打开变量观察窗⼝,加⼊对应的变量,全速运⾏,随着红⾊LED的闪烁,跟踪⽤来记录红⾊LED闪烁次数的8位⽆符号变量的变化情况;四、硬件设计1 、发光⼆极管(LED )与嵌⼊式微控制器(STM32F103)的接⼝电路2 、按键与嵌⼊式微控制器(STM32F103)的接⼝电路五、软件设计1 、LED 点亮实验程序:程序(略)2 、流⽔灯实验⼀程序:程序(略)3 、按键控制LED 实验程序:程序(略)4 、流⽔灯实验⼆程序:程序(略)六、实验结果1 、LED 点亮实验结果:⽤⽂字或图⽚描述该程序运⾏的结果2 、流⽔灯实验⼀结果:⽤⽂字或图⽚描述该程序运⾏的结果3 、按键控制LED 实验结果:⽤⽂字或图⽚描述该程序运⾏的结果4 、流⽔灯实验⼆结果:⽤⽂字或图⽚描述该程序运⾏的结果(调试界⾯中断点设置和变量观察窗⼝的截图) PA8 PD2PA15 PA13实验⼆基于STM32的嵌⼊式软件开发⾼级实验⼀、实验⽬的1 、了解中断控制器(NVIC)的内部结构和⼯作原理2 、深⼊理解中断机制,学会编写中断服务函数3 、学会使⽤中断服务函数开发基于前后台架构的较复杂的嵌⼊式应⽤程序4 、掌握串⾏通信的原理,掌握通⽤同步串⾏收发器(USART)的软件开发⽅法5 、熟悉模数转换的过程和性能指标,掌握模数转换器(ADC)的软件开发⽅法⼆、实验环境1 、硬件:ALIENTEK STM32F103嵌⼊式开发板2 、软件:REALVIEW MDK或IAR EWARM三、实验内容1 、LED闪烁实验:使⽤NVIC(含SYSTICK)和GPIO的相关知识,编写中断服务函数,并开发基于前后台架构的嵌⼊式应⽤程序,使开发板上绿⾊LED每1s闪烁⼀次;2 、串⼝输出实验:使⽤USART的相关知识,设计基于⽆限循环架构的嵌⼊式应⽤程序,通过USART1向PC 的串⼝发送“Hello World!”,其中USART1和串⼝的波特率设置为115200bps,数据格式设置为8位数据位、⽆奇偶校验位、1位停⽌位和⽆数据流控制;在PC上运⾏串⼝调试助⼿,找到对应的COM⼝并作设置波特率和数据格式后打开,再运⾏开发板上的程序,观察串⼝调试助⼿中接收区的数据,验证程序的运⾏结果;3 、MCU温度检测实验:使⽤NVIC(含SYSTICK)、USART和ADC的相关知识编写程序,编写中断服务函数,并开发基于前后台架构的嵌⼊式应⽤程序,每隔1s通过⽚内温度传感器和模数转换器(ADC)检测MCU的温度并通过USART1将其输出到PC的串⼝上;在PC上运⾏串⼝调试助⼿,找到对应的COM⼝并作相应设置后打开,再运⾏开发板上的程序,观察PC上串⼝调试助⼿中接收区的数据变化情况,验证程序的运⾏结果;四、硬件设计1 、发光⼆极管(LED)与嵌⼊式微控制器(STM32F103)的接⼝电路PA8PD22 、按键与嵌⼊式微控制器(STM32F103)的接⼝电路3 、嵌⼊式微控制器(STM32F103)的温度传感器和ADC 的模块图五、软件设计1 、LED 闪烁实验:程序(包括主函数源⽂件和中断服务函数源⽂件)2 、串⼝输出实验:程序(略)3 、MCU 温度检测实验:程序(包括主函数源⽂件和中断服务函数源⽂件)六、实验结果 1 、LED 闪烁实验:⽤⽂字或图⽚描述该程序运⾏的结果2 、串⼝输出实验:⽤⽂字或图⽚描述该程序运⾏的结果(程序运⾏中PC 上串⼝调试助⼿的截图) 3 、MCU 温度检测实验:⽤⽂字或图⽚描述该程序运⾏的结果(程序运⾏中PC 上串⼝调试助⼿的截图)PA15。
嵌入式系统实验报告
嵌入式系统实验报告一、实验目的本次嵌入式系统实验的主要目的是深入了解嵌入式系统的基本原理和开发流程,通过实际操作和项目实践,提高对嵌入式系统的设计、编程和调试能力。
二、实验设备与环境1、硬件设备嵌入式开发板:_____计算机:_____调试工具:_____2、软件环境操作系统:_____开发工具:_____编译环境:_____三、实验内容1、基础实验熟悉开发板的硬件结构和接口,包括处理器、存储器、输入输出端口等。
学习使用开发工具进行程序编写、编译和下载。
2、中断实验了解中断的概念和工作原理。
编写中断处理程序,实现对外部中断的响应和处理。
3、定时器实验掌握定时器的配置和使用方法。
利用定时器实现定时功能,如周期性闪烁 LED 灯。
4、串口通信实验学习串口通信的协议和编程方法。
实现开发板与计算机之间的串口数据传输。
5、 ADC 转换实验了解 ADC 转换的原理和过程。
编写程序读取 ADC 转换结果,并进行数据处理和显示。
四、实验步骤1、基础实验连接开发板与计算机,打开开发工具。
创建新的项目,选择合适的芯片型号和编译选项。
编写简单的程序,如控制 LED 灯的亮灭,编译并下载到开发板上进行运行和调试。
2、中断实验配置中断相关的寄存器,设置中断触发方式和优先级。
编写中断服务函数,在函数中实现相应的处理逻辑。
连接外部中断源,观察中断的触发和响应情况。
3、定时器实验初始化定时器相关的寄存器,设置定时器的工作模式和定时周期。
在主程序中启动定时器,并通过中断或查询方式获取定时时间到达的标志。
根据定时标志控制 LED 灯的闪烁频率。
4、串口通信实验配置串口相关的寄存器,设置波特率、数据位、停止位等参数。
编写发送和接收数据的程序,实现开发板与计算机之间的双向通信。
使用串口调试助手在计算机上进行数据收发测试。
5、 ADC 转换实验配置 ADC 模块的相关寄存器,选择输入通道和转换精度。
启动 ADC 转换,并通过查询或中断方式获取转换结果。
嵌入式实验报告

嵌入式实验报告学院:信息工程学院专业:计算机科学与技术班级:计算机班姓名:学号:指导老师:实验目录实验一嵌入式系统开发环境实验 (2)实验二系统节拍定时器实验 (12)实验三 GPIO控制实验 (16)实验四外部中断实验 (19)实验五串口通讯实验 (23)实验一嵌入式系统开发环境实验【实验目的】1.熟悉RealView MDK集成开发环境以及使用方法。
2.熟悉嵌入式系统软件设计方法和流程。
【实验内容】1. 通过例程熟悉、掌握嵌入式系统的编辑、编译、调试、下载及运行过程。
2. 建立自己的工程文件,在开发板板上调试程序。
【实验步骤】(一)程序安装1. 建议在安装之前关闭所有的应用程序,双击安装文件,弹出如图对话框,Next2.默认选择C盘文件下安装。
3.这样就在c盘底下出现keil文件夹。
4.单击选择菜单“>"License Management" 将弹出下面一张图的界面:复制其中CID号,以便在粘贴到下一步中的破解软件。
5.复制CID6.运行破解软件,将出现下面一张图的界面,把上步复制的CID号粘贴到相应位置,其他选项如图,然后点击“Generate”按钮,然后复制产生的序列号,粘贴到上一步的下面一张图的LIC输入框中,然后点击右侧的Add LIC,即可完成破解。
7.安装文件夹中的jlink驱动。
(二)工程创建、编译使用Realview MDK创建、完成一个新的工程只需要以下几个环节:→创建工程并选择处理器→选择工具集→创建源文件→配置硬件选项→配置对应启动代码→编译链接→下载→调试。
1.创建工程并选择处理器选择Project→New Project…,输入创建的新工程的文件名,即可创建一个新的工程。
2.创建一个新工程时,需要为工程选择一款对应处理器,在NXP 列表下选择LPC1768 芯片。
然后点击OK。
接下来出现的对话框选择“是或者也可以通过单击Project→Select Device for Target…在本次课程中,我们选择3.点击上图的ok,在弹出的对话框中确定是否需要复制启动文件选择否,如果选择是,将使用keil自带的启动文件4.在工程区域单击鼠标右键,选择manage components5.在“Project Components”标签下根据需要建立目录,第一栏是工程的根目录,在这里可以修改目录名;第二栏是添加Groups,可以根据个人习惯建立不同的组来分别放置不同类型的文件;第三栏是为建立的组添加代码文件用的,点击“Add Files”添加。
嵌入式开发实验报告

嵌入式开发实验报告嵌入式开发实验报告一、引言嵌入式系统是一种集成了计算机硬件和软件的特殊计算机系统,它被嵌入到其他设备中,以完成特定的功能。
嵌入式系统广泛应用于家电、汽车、医疗设备等各个领域。
本实验旨在通过嵌入式开发,深入了解嵌入式系统的原理和应用。
二、实验目的本实验的主要目的是通过嵌入式开发,学习嵌入式系统的基本原理和应用技术。
具体目标包括:1. 理解嵌入式系统的基本概念和特点;2. 掌握嵌入式系统的开发流程和工具;3. 进行简单的嵌入式应用开发。
三、实验环境本实验使用了一款嵌入式开发板作为实验平台,该开发板配备了ARM Cortex-M4处理器和丰富的外设接口,适用于各种嵌入式应用开发。
开发板上预装了嵌入式操作系统,并提供了开发工具链和调试接口。
四、实验过程1. 硬件连接:将开发板与计算机通过USB线连接,确保开发板与计算机之间的通信正常。
2. 软件配置:在计算机上安装嵌入式开发工具,并进行相关配置,以便进行开发和调试。
3. 编写代码:使用嵌入式开发工具编写嵌入式应用程序的代码。
根据实验要求,可以选择使用C语言或汇编语言进行编程。
4. 编译和烧录:将编写好的代码进行编译,生成可执行文件。
然后,通过调试接口将可执行文件烧录到开发板上。
5. 调试和测试:在开发板上运行烧录好的程序,并进行调试和测试。
根据实验要求,可以使用调试工具对程序进行单步调试,以便观察程序的执行过程和结果。
五、实验结果通过以上实验步骤,我们成功地进行了嵌入式应用开发,并取得了如下实验结果:1. 实现了一个简单的LED灯控制程序,通过开发板上的按键控制LED灯的亮灭。
2. 编写了一个基于嵌入式系统的温度监测程序,通过开发板上的温度传感器获取环境温度,并在LCD屏幕上显示出来。
六、实验总结通过本次实验,我们深入了解了嵌入式系统的原理和应用技术。
通过实际的开发过程,我们掌握了嵌入式系统的开发流程和工具使用方法。
我们不仅学会了编写嵌入式应用程序的代码,还学会了进行调试和测试,以确保程序的正确性和稳定性。
嵌入式软件开发基础实验报告 中断实验
上海电力学院嵌入式软件开发基础实验报告题目:ARM 【实验4.3】中断实验专业:电子科学与技术年级:姓名:学号:一、实验目的(1)、学会使用 Embest IDE 编写简单的 C 语言程序并进行调试;(2)、了解不同中断触发方式对中断产生的影响;(3)、理解 S3C44B0X 处理器的中断响应过程;(4)、熟练掌握如何进行 ARM 处理器中断处理的软件编程方法。
二、实验设备硬件:Embest EduKit-III 实验平台,Embest ARM 标准/增强型仿真器套件,PC 机。
软件:Embest IDE Pro ARM 集成开发环境,Windows 98/2000/NT/XP。
三、实验步骤1. 准备实验环境使用 Embest 仿真器连接目标板,使用 Embest EduKit-III 实验板附带的串口线,连接实验板上的 UART0 和 PC 机的串口。
2. 串口接收设置在PC 机上运行windows 自带的超级终端串口通信程序(波特率115200、1 位停止位、无校验位、无硬件流控制);或者使用其它串口通信程序。
3. 打开实验例程1)拷贝光盘CD1\Software\EduKit44b0 文件夹到EmbestIDE\Examples\Samsung\ 目录下;2) 使用 Embest IDE 通过 Embest JTAG 仿真器连接实验板,打开实验例程目录 4.3_int_test 子目录下的 int_test.pjf 例程,编译链接工程;3) 点击 IDE 的 Debug 菜单,选择 Remote Connect 项或 F8 键,远程连接目标板;4) 点击 IDE 的 Debug 菜单,选择 Download 下载调试代码到目标系统的 RAM 中;5) 打开 View 菜单>Debug Windows>Register 寄存器观察窗口(快捷键Alt+5 ),在寄存器观察窗口下面选择外围寄存器(Peripheral),将 INTERRUPT 中断寄存器组展开,重点观察 INTPND 和 I_ISPR 寄存器值的变化。
嵌入式软件开发基础实验-实验原理
嵌入式软件开发实验原理目录嵌入式软件开发基础简述 (1)1. 硬件部分简述 11.1.开发板硬件特性 (1)1.2.硬件接口的连接 (3)2.软件部分简述 32.1.软件开发环境概述 (3)2.2.软件部分的安装 (4)2.2.1. 开发环境ADS 1.2的安装 (4)2.2.2. H-Jtag调试代理的安装 (9)2.2.3. 超级终端的安装 (12)2.2.4. 开发环境配置 (15)2.3.如何使用设置ADS1.2 工程环境 (16)2.4.添加文件,编译工程 (24)2.5.用AXD进行代码调试 (27)嵌入式软件开发基础简述1. 硬件部分简述1.1.开发板硬件特性序号名称描述1 CPU Samsung S3C2440A 300MHz主频,最高400Mhz2 ROM 1Mbytes SST Nor Flash ,64Mbytes Samsung Nand Flash3 RAM 64Mbytes SDRAM,133MHz刷新频率4 LAN 一个10M Ethernet,RJ-45接口;一个10/100M Ethernet,RJ-45接口5 SERIAL 一个DB9标准串口6 USB 一个USB Host A型接口(USB 1.1协议) ,一个USB Slave B型接口,(USB1.1协议 )7 Audio 一个音频接口(双声道,可直接接耳塞),一个音频输入口,自带驻机式话筒8 RTC 外接32.768KHz的晶振,带有备份电池,可保持时钟9 JTAG 一个20针标准的JTAG接口,可于仿真器连接自带LPT接口电路,主要用来下载bootloader10 SD Card 标准SD Card插座11 CF Card 标准CF Card插座标准PCMCIA Card插座12 PCMCIACard13 IDE 标准IDE接口14 LED 4个可编程用户LED15 Keypad 4个可编程用户按键(显示配板上带8个矩阵键盘)16 485 标准485两芯接口17 CAN 标准CAN两芯接口18 GPS/GPRS GPS/GPRS接口实现可与本公司设计的(GPS/GPRS)模块连接19 IrDA 红外接收/发送模块20 AD 4路AD转换可调电阻21 IIC 8K IIC 接口的EEPROM22 BEEP PWM控制BEEP一路23 Switch 一个电源开关24 Reset 一个复位按键25 扩展插针一个扩展50芯插针(用户可自由设计自己的扩展板与其连接进行扩展)26 Power 一个开关电源+12V 供电 27 LCD 8寸真彩液晶屏 28 触摸屏 8寸四线电阻式触摸屏 29VGA可驱动显示器1.2.硬件接口的连接1. 将并口线连接到如下图所示的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图4-19 链接配置页
8.输出文件设置
在Project→Option for Target的 Output页中配置输出文件,如图4-20所示。
图4-20 输出文件配置页
4.3.6 工程的编译链接
完成工程的设置后,就可以对工程进行编 译链接了。
嵌入式系统技术与设计
第4章 嵌入式软件基础实验
4.1
Realview MDK简介 ULINK2仿真器简介
使用Realview MDK创建一个工程 嵌入式软件开发基础实验
4.2
4.3
4.4
本章主要介绍Realview MDK软件的使用 方法及几个典型的嵌入式软件基础实验,通过 本章的学习,读者应熟悉MDK平台开发,并对 ARM编程有更深一步的认识。 本章主要内容: ● Realview MDK简介 ● ULINK2 仿真器简介 ● 使用Realview MDK创建一个工程 ● 嵌入式软件基础实验
3.实验内容
(1)熟悉开发环境的使用并使用ldr/str、 mov等指令访问寄存器或存储单元。 (2)使用add/sub/lsl/lsr/and/orr等指 令,完成基本算术/逻辑运算。
4.实验原理
图4-22 大端格式
图4-23建工程。
图4-24 新建工程
(2)为工程选择CPU。
图4-2 ULINK2仿真器
ULINK2的主要功能如下: (1)下载目标程序; (2)检查内存和寄存器; (3)片上调试,整个程序的单步执行; (4)插入多个断点; (5)运行实时程序; (6)对Flash存储器进行编程。
ULINK2的新特点包括: (1)标准Windows USB驱动支持,也就 是ULINK2即插即用; (2)支持基于ARM Cortex-M3的串行线 调试; (3)支持程序运行期间的存储器读写、 终端仿真和串行调试输出; (4)支持10/20针连接器。
图4-32 在软件仿真下调试程序
6.实验参考程序
(1)实验A。 (2)实验B。
4.4.2 ARM汇编指令实验二
1.实验目的
(1)通过实验掌握使用ldm/stm、b、bl 等指令完成较为复杂的存储区访问和程序分支。 (2)学习使用条件码,加强对CPSR的认识。
2.实验设备
(1)硬件:PC。 (2)软件:Vision3 IDE for ARM集成 开发环境。
1.实验目的
(1)阅读S3C2410启动代码,观察处理器 的启动过程。 (2)学会使用MDK集成开发环境辅助窗口 来分析判断调试过程和结果。 (3)学会在MDK集成开发环境中编写、编 译与调试汇编和C语言相互调用的程序。
2.实验设备
(1)硬件:PC。 (2)软件:Vision3 IDE for ARM集成 开发环境。
图4-12 选择Flash编程算法
4.调试设置
Vision 3调试器提供了两种调试模式, 可以从Project→Options for Target对话框 的Debug页内进行选择,如图4-13所示。
图4-13 调试器的选择
图4-14 选择ULINK USB-JTAG仿真器调试
图4-15 读取设备ID
3.实验内容
使用汇编完成一个随机数产生函数,通过C 语言调用该函数,产生一系列随机数,存放到 数组里面。
4.实验操作步骤 5.实验参考程序
(1)randtest.c 参考源代码。 (2)random.s参考源代码。
本章小结
本章重点是让读者通过实验掌握嵌入式软 件开发工具的使用及软件开发的基础知识。本 章的实验是对前几章理论内容的应用与巩固。 每个实验的设计都有不同的针对性,以便读者 掌握。
图4-25 选择CPU
(3)添加启动代码。
图4-26 添加启动代码
(4)选择开发工具。
图4-27 选择开发工具
(5)建立源文件。 (6)添加源文件。
图4-28 添加源文件
(7)工程配置。
图4-29 基本配置Target
图4-30 基本配置 Linker
图4-31 基本配置Debug
(8)生成目标代码。 (9)调试。
图4-21 工程Project菜单和工具条
4.4 嵌入式软件开发基础实验
4.4.1 ARM汇编指令实验一 1.实验目的
(1)初步学会使用Vision 3 IDE for ARM开发环境及ARM软件模拟器。 (2)通过实验掌握简单ARM汇编指令的使 用方法。
2.实验设备
(1)硬件:PC。 (2)软件:Vision 3 IDE for ARM集成 开发环境。
4.3 使用Realview MDK创建一个工程
Realview MDK引入工程管理,使得基于 ARM处理器的应用程序设计开发变得越来越方 便。通常使用Realview MDK创建一个新的工程 需要以下几个环节: 选择工具集→创建工程并选择处理器→创 建源文件→配置硬件选项→配置对应启动代码 →编译链接生成HEX文件。
图4-5 加入启动代码后的工程
4.3.3 建立一个新的源文件
工程创建完成以后,就可以开始编写程序。
4.3.4 工程中文件的加入
图4-6 加入源文件到工程中
4.3.5 工程基本配置 1.硬件选项配置
Vision 3可根据目标硬件的实际情况对 工程进行配置。
图4-7 处理器配置对话框
2.处理器启动代码配置
5.编译配置
Vision IDE目前支持RealView、Keil CARM和GNU这三种编译器,
图4-16 选择编译器
图4-17 编译器配置页
6.汇编选项设置
打开Option for Target对话框的Asm页, 出现如图4-18所示的汇编属性配置界面。
图4-18 汇编配置界面
7.链接选项设置
4.1 Realview MDK简介
MDK(Microcontroller Development Kit)是Keil公司(现在已经被ARM公司收购) 开发的ARM开发工具,是用来开发基于ARM 核 的系列微控制器的嵌入式应用程序的开发工具。
图4-1 MDK开发工具的组件
4.2 ULINK2仿真器简介
通常情况下,ARM程序都需要初始化代码 用来配置所对应的目标硬件。
图4-8 仿真器驱动配置图
图4-9 仿真器下载应用程序配置图
3.工具配置
工具选项(Utilities)主要设置Flash 的下载选项,如图4-10所示。
图4-10 “Utilities”配置对话框
图4-11 Flash下载选项设置
3.实验内容
通过ARM汇编指令,在各种处理器模式下切 换并观察各种模式下寄存器的区别;掌握ARM 不同模式的进入与退出。
4.实验操作步骤 5.实验参考程序
4.4.5 C语言实例一
1.实验目的
(1)学会使用Vision IDE for ARM开 发环境编写简单的C语言程序。 (2)学会编写和使用调试脚本。 (3)掌握通过 memory/register/watch/variable窗口分析 判断运行结果。
2.实验设备
(1)硬件:PC。 (2)软件:Vision3 IDE for ARM集成 开发环境。
3.实验内容
用C语言编写延时函数,使用嵌入汇编。
4.实验原理 5.实验操作步骤 6.实验参考程序 7.Startup.S的源代码 8.Ctest.sct的源代码
4.4.7 汇编语言与C语言相互调用实例
4.4.6 C语言实验程序二
1.实验目的
(1)掌握建立基本ARM工程,包含启动代 码,连接属性的配置等。 (2)了解ARM9的启动过程,学会使用MDK 编写简单的C语言程序和汇编启动代码并进行 调试。 (3)掌握如何指定代码入口地址与入口 点。 (4)掌握通过memory、register、 watch、Local等窗口分析判断结果。
2.实验设备
(1)硬件:PC。 (2)软件:Vision IDE for ARM集成 开发环境。
3.实验内容
用函数初始化栈指针,并使用C语言完成延 时函数。
4.实验原理
(1)调试脚本。 (2)调试函数的执行方法。 (3)常用命令介绍。
5.实验操作步骤 6.实验参考程序
(1)C程序 (2)调试脚本DebugInRam.ini
3.实验内容
(1)熟悉开发环境的使用并完成一块存储 区的复制。 (2)完成分支程序设计,要求判断参数, 根据不同参数,调用不同的子程序。
4.实验操作步骤 5.实验参考程序
4.4.3 Thumb汇编指令实验
1.实验目的
通过实验掌握ARM处理器16位Thumb汇编指 令的使用方法。
2.实验设备
(1)硬件:PC。 (2)软件:MDK集成开发环境、Windows 98/2000/NT/XP。
1.实验目的
(1)通过实验,掌握学会使用msr/mrs指 令实现ARM处理器工作模式的切换;观察不同 模式下的寄存器,加深对CPU结构的理解。 (2)通过实验进一步熟悉ARM汇编指令。
2.实验设备
(1)硬件:Embest ARM教学实验系统、 PC。 (2)软件:Vision3 IDE for ARM集成 开发环境。
4.3.1 选择工具集
利用Vision 3创建一个基于处理器的应 用程序,首先要选择开发工具集。
图4-3 选择工具集
4.3.2 创建工程并选择处理器
选择Project→New Project…菜单项, Vision 3将打开一个标准对话框,输入工程 名,即可创建一个新的工程。
图4-4 选择处理器
ULINK是Keil公司提供的USB-JTAG接口仿 真器,目前最新的版本是2.0。它支持诸多芯 片厂商的8051、ARM7、ARM9、Cortex-M3、 Infineon C16x、Infineon XC16x、 InfineonXC8xx、STMicroelectronics PSD 等多个系列的处理器。