细数台达PLC基本指令Word版
最新台达PLC-指令大全

台达PLC 指令大全指令列表中所列适用机种ES 包含ES/EX/SS;SA 包含SA/SX/SC;EH2 包含EH2/SV;EH3 包含EH3/SV2。
指令表ES/EX/SS 机种不支持脉冲执行型指令(P 指令)。
如果您想要了解更多关于台达PLC 指令大全方面的信息,成都永浩机电工程技术有限公司就是一个不错的选择!成都永浩机电工程技术有限公司引进德国先进的技术,开发了艾拓利尔品牌系列流量、液位、压力产品,长期与德国许多大型仪表企业技术合作,产品不断更新换代。
研发的AP200系列压力变送器采用了先进的模块一体化设计,独立菜单操作,液晶背光显示。
产品变送器防护等级达到IP65~IP68,适应于潮湿、浸泡等恶劣环境下的使用。
成都永浩机电工程技术有限公司成立于2006年,是专注于自动化技术的领导厂商。
面对日益严峻的环境问题以及工业自动化落后的现状,永浩长期致力于自控仪表及自控系统的研发、集成,秉乘“开创智能、环保新时代”的经营使命,整合国际先进自动化技术,持续开发创新节能产品及解决方案,不断努力提升自控技术在各行业的应用和转化,以减轻环境问题对经济发展的冲击以及劳动力成本攀升对工业制造的制约。
近年来,永浩已逐步从自控仪表的提供商成功转型为整体解决方案的服务商,深耕“传感层产品”、“控制层产品”及“行业解决方案”三大业务范畴。
成都永浩机电工程技术有限公司是台达产品经销商,专注于自动化过程控制,现场仪表设计、销售服务的现代化高新技术企业,公司引进德国先进的技术,开发艾拓利尔品牌系列流量、液位、压力产品,长期与德国许多大型仪表企业技术合作,产品不断更新换代,自投入市场以来,广泛应用于石油、化工、电力、冶金、环保、制药、水处理等行业,得到了广大用户的一致好评。
公司主要产品包括:流量仪表类:电磁流量计、涡街流量计、涡轮流量计、差压式流量计、超声波流量计、金属管浮子流量计、椭圆齿轮流量计、质量流量计及热式流量开关。
细数台达PLC基本指令

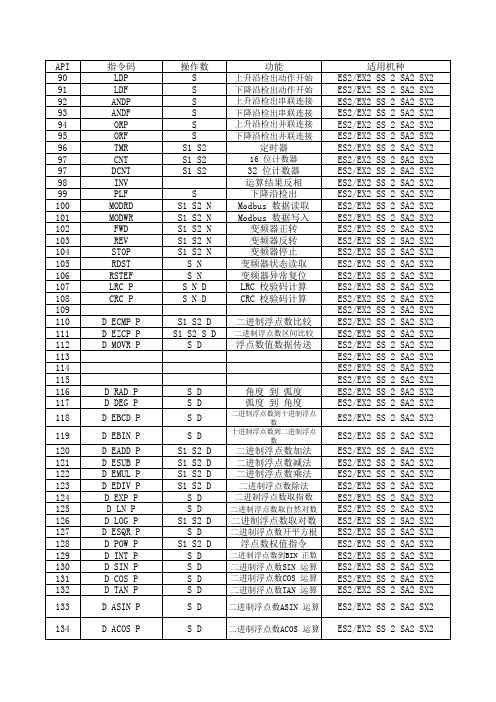
基本指令:一般指令:LD 载入A接点LDI 载入B接点AND 串联?A接点ANI 串联B接点OR 并联A接点ORI 并联B接点ANB 串联回路方块ORB 并联回路方块MPS 存入堆栈MRD 堆栈读取(指针不动) MPP 读出堆栈输出指令:OUT 驱动线圈SET 动作保持(ON)RST 接点或寄存器清除定时器,计数器:TMR 16位定时器CNT 16位计数器DCNT 32位计数器主控指令:MC 公共串联接点的连接MCR 公共串联接点的解除接点上升沿/下降沿输出指令:LDP 上升沿检出动作开始LDF 下降沿检出动作开始ANDP 上升沿检出串联连接ANDF 下降沿检出串联连接ORP 上升沿检出并联连接ORF 下降沿检出并联连接脉冲输出指令:PLS 上升沿检出PLF 下降沿检出结束指令:END 程序结束其它指令:NOP 无动作INV 运算结果反相P 指针I 中断插入指针步进梯形指令:STL 程序跳至副母线RET 程序返回主母线应用指令:程序流程控制:00CJ 条件转移01CALL 呼叫子程序02SRET 子程序结束03IRET 中断插入返回04EI 中断插入允许05DI 中断插入禁止06FEND 主程序结束07WDT 逾时监视定时器08FOR 循环范围开始09NEXT 循环范围结束传送比较:10CMP 比较设定输出11ZCP 区间比较12MOV 数据传送13SMOV 移位传送14CML 反转传送15BMOV 全部传送16FMOV 多点传送17XCH 数据交换18BCD BIN→BCD变换19BIN BCD→BIN变换四则逻辑运算:20ADD BIN加法21 SUB BIN减法22MUL BIN乘法23DIV BIN除法24INC BIN加一25DEC BIN减一26WAND/DAND 逻辑与?(AND)运算27WOR/DOR 逻辑或(OR)?运算28WXOR/DXOR 逻辑异或(XOR)?运算29NEG 取负数(取2的补码)循环移位与移位:30ROR 右循环31ROL 左循环32RCR 附进位标志右循环33RCL 附进位标志左循环34SFTR 位右移35SFTL 位左移36WSFR 字右移37WSFL 字左移38SFWR 位移写入39SFRD 位移读出数据处理:40ZRST 批次复位41DECO 译码42ENCO 编码43SUM On位数量44BON On位判定45MEAN 平均值46ANS 信号报警器置位47ANR 信号报警器复位48SQR BIN开平方49FLT BIN整数→二进制浮点数变换高速处理:50REF I/O状态即时刷新51REFF 输入滤波器时间调整52MTR 矩阵分时输入53DHSCS 比较置位(高速计数器)54DHSCR 比较复位(高速计数器)55DHSZ 区间比较(高速计数器)56SPD 脉冲频率检测57PLSY 脉冲输出58PWM 脉冲波宽调制59PLSR 附加减速脉冲输出便利指令:??60IST 手动/自动控制61SER 数据检索62ABSD 绝对方式凸轮控制63 INCD 相对方式凸轮控制64TTMR 示教式定时器65STMR 特殊定时器66ALT On/Off交替67RAMP 斜坡信号68 DTM 数据转换与搬移69SORT 数据整理排序外部设定显示:70TKY 十键键盘输入71 HKY 十六键键盘输入72DSW 数字开关73SEGD 七段显示器译码74SEGL 七段显示器分时显示75ARWS 方向开关控制76ASC ASCII码变换77PR ASCII码打印外部SER设备:78FROM 扩展模块CR数据读出79TO 扩展模块CR数据写入80RS 串行数据传送81PRUN 8进制位传送82ASCI HEX?转为ASCII83HEX ASCII转为HEX84CCD 校验码85VRRD 电位器值读出86VRSC 电位器刻度读出87ABS 绝对值运算88PID PID运算台达变频器通讯:100MODRD MODBUS数据读取101MODWR MODBUS数据写入102FWD 变频器正转指令103REV 变频器反转指令104STOP 变频器停止指令105RDST 变频器状态读取106 RSTEF 变频器异常复位107LRC LRC校验码计算108CRC CRC校验码计算150 MODRW MODBUS资料读出/?入206 ASDRW 台达伺服器通?浮点运算:110DECMP 二进制浮点数比较112DMOVR 浮点数值数据移动111DEZCP 二进制浮点数区间比较116 DRAD 角度→弧度117DDEG 弧度→角度118DEBCD 二进制浮点数→十进制浮点数119DEBIN 十进制浮点数→二进制浮点数120DEADD 二进制浮点数加法121DESUB 二进制浮点数法122DEMUL 二进制浮点数乘法123DEDIV 二进制浮点数除法124DEXP 二进制浮点数取指数125DLN 二进制浮点数取自然对数126DLOG 二进制浮点数取对数127DESQR 二进制浮点数平方128DPOW 浮点数乘方129INT 二进制浮点数→BIN整数变换130DSIN 二进制浮点数SIN运算131DCOS 二进制浮点数COS运算132DTAN 二进制浮点数TAN运算133DASIN 二进制浮点数ASIN运算134DACOS 二进制浮点数ACOS运算135DATAN 二进制浮点数ATAN运算136DSINH 二进制浮点数SINH运算137DCOSH 二进制浮点数COSH运算138DTANH 二进制浮点数TANH运算172DADDR 浮点数值加法173DSUBR 浮点数值减法174DMULR 浮点数值乘法175DDIVR 浮点数值除法数据处理?II:143DELAY 延迟指令144 GPWM 一般用脉冲波宽调变145 FTC 模糊化温度控制147 SWAP 上/下字节交换148MEMR 文件寄存器读出149MEMW 文件寄存器写入151PWD 输入脉宽检测152RTMU I中断子程序执行时间测量开始153RTMD I中断子程序执行时间测量结束154RAND 随机数值产生109SWRD 数字开关读取196 HST 高速定时器176 MMOV 16 32位数值转换177 GPS (GPS)接收通讯指令178 DSPA 太阳能板位置指令179WSUM求和202SCAL比例值运算203SCLP参数型比例值运算205CMPT表格比较指令207CSFO撷取速度与追随输出指令定位控制:155DABSR ABS?现在值读出156ZRN 原点回归157PLSV 附旋转方向脉冲输出158 DRVI 相对定位159DRVA 绝对定位191DPPMR 双轴相对点运动192DPPMA 双轴绝对点运动193DCIMR 双轴相对圆弧插补194DCIMA 双轴绝对圆弧插补195DPTPO 单轴建表式脉冲输出197 DCLLM 闭回路定位控制198 DVSPO 可变速度脉波输出199 DICF 立即变更频率指令万年历:160TCMP 万年历数据比较161 TZCP 万年历数据取间比较162TADD 万年历数据加法163TSUB 万年历数据减法166TRD 万年历数据读出167TWR 万年历数据写入169 HOUR 时间表格雷码:170GRY BIN→GRY码变换171GBIN GRY码→BIN变换矩阵:180MAND 矩阵与(AND)运算181MOR 矩阵或(OR)运算182MXOR 矩阵异或(XOR)运算183 MXNR 矩阵同或(XNR)运算184MINV 矩阵反相185MCMP 矩阵比较186MBRD 矩阵位读出187MBWR 矩阵位写入188MBS 矩阵位位移189MBR 矩阵位循环移位190 MBC 矩阵位状态计数接点型态逻辑运算:215LD&S1&S2216LD|S1|S2217LD^S1^S2218AND&S1&S2219AND|S1|S2220AND^S1^S2221OR&S1&S2222OR|S1|S2223OR^S1^S2接点型态比较指令:224LD=S1=S2225LD>S1>S2226LD<S1<S2228LD<>S1≠S2229LD<=S1≦S2230LD>=S1≧S2232AND=S1=S2233AND>S1>S2234AND<S1<S2236AND<>S1≠S2237AND<=S1≦S2238AND>=S1≧S2240OR=S1=S2241OR>S1>S2242OR<S1<S2244OR<>S1≠S2245OR<=S1≦S2246OR>=S1≧S2。
台达PLC MODRD MODRW指令
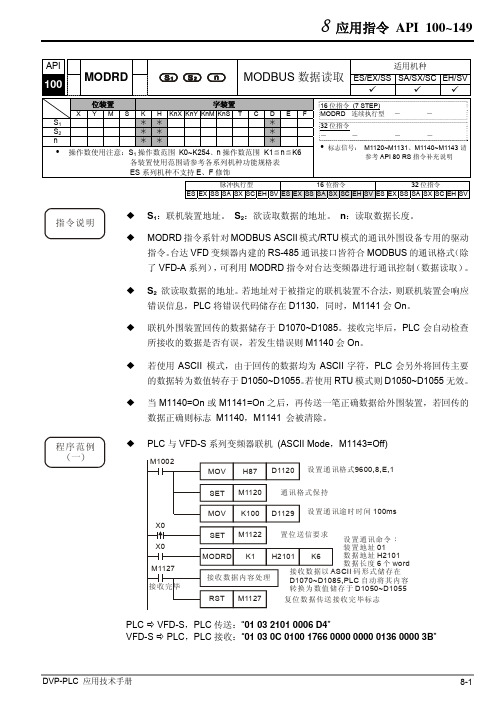
当 M1140=On 或 M1141=On 之后,再传送一笔正确数据给外围装置,若回传的 数据正确则标志 M1140,M1141 会被清除。
程序范例 (一)
PLC 与 VFD-S 系列变频器联机 (ASCII Mode,M1143=Off)
M1002
MOV H87 D1120 设置通讯格式9600,8,E,1
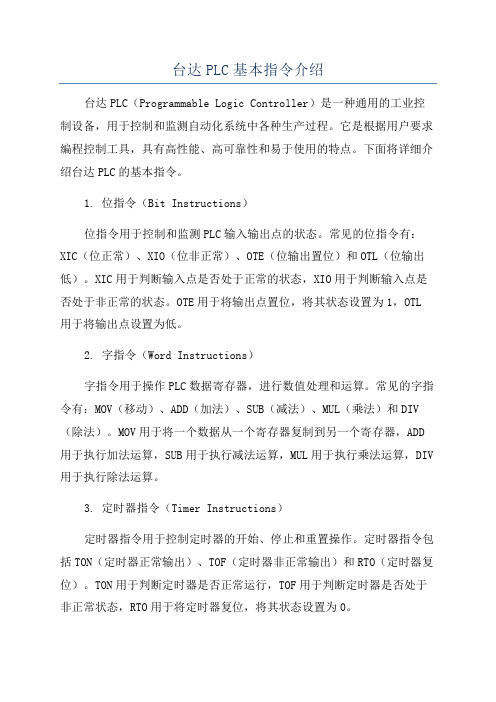
S2 欲读取数据的地址。若地址对于被指定的联机装置不合法,则联机装置会响应 错误信息,PLC 将错误代码储存在 D1130,同时,M1141 会 On。
联机外围装置回传的数据储存于 D1070~D1085。接收完毕后,PLC 会自动检查 所接收的数据是否有误,若发生错误则 M1140 会 On。
若使用 ASCII 模式,由于回传的数据均为 ASCII 字符,PLC 会另外将回传主要 的数据转为数值转存于 D1050~D1055。若使用 RTU 模式则 D1050~D1055 无效。
DVP-PLC 应用技术手册
8 应用指令 API 100~149
程序范例 (二)
PLC 与 VFD-S 系列变频器联机 (RTU Mode,M1143=On)
M1002
MOV H87 D1120 设置通讯格式 9600,8,E,1
SET M1120 通讯格式保持
MOV K100 D1129 设置通讯逾时时间 100ms
ES 系列机种不支持 E、F 修饰
16 位指令 (7 STEP)
MODWR 连续执行型 -
-
32 位指令
-
-
-
-
标志信号: M1120~M1131、M1140~M1143 请 参考 API 80 RS 指令补充说明
脉冲执行型
16 位指令
台达PLC指令[1]
![台达PLC指令[1]](https://img.taocdn.com/s3/m/f5159c61f5335a8102d22044.png)
,PLS上升沿检出,PLY,LDP上升沿检出动作开始,LDF
下降沿检出动作开始.SET 动作保持 (ON) ,RST复位,C,T,
STL程序跳至副母线 RET 程序返回主母线,FOR循环范围开始
NEXT 循环范围结束,CMP比较设定输出,ZCP区间比较,MOV 数据传送,ADDBIN 加法,SUB BIN 减法,MUL,DIV BIN 除法,FLTBIN 整数 → 二进制浮点数变换
浮点数值加法
173
DSUBR
浮点数值减法
174
DMULR
浮点数值乘法
175
DDIVR
浮点数值除法
数据处理 II :
143
DELAY
延迟指令
144
GPWM
一般用脉冲波宽调变
145
FTC
模糊化温度控制
随机数值产生
109
SWRD
数字开关读取
196
HST
高速定时器
176
MMOV
1632 位数值转换
177
GPS
(GPS) 接收通讯指令
178
DSPA
太阳能板位置指令
179
WSUM
求和
202
SCAL
比例值运算
134
DACOS
二进制浮点数ACOS 运算
135
DATAN
二进制浮点数ATAN 运算
136
DSINH
二进制浮点数SINH 运算
137
DCOSH
二进制浮点数COSH 运算
138
台达PLC指令集
S1 S2 D S1 S2 S D S D
浮点数值数据传送
D RAD P D DEG P D EBCD P D EBIN P D EADD P D ESUB P D EMUL P D EDIV P D EXP P D LN P D LOG P D ESQR P D POW P D INT P D SIN P D COS P D TAN P D ASIN P D ACOS P
D D D D S1 S2 S1 S2 S1 S2 S1 S2 S D S D S1 S2 S D S1 S2 S D S D S D S D S D S D
S S S S
角度 到 弧度 弧度 到 角度
二进制浮点数到十进制浮点数 十进制浮点数到二进制浮点数
D D D
二进制浮点数加法 二进制浮点数减法 二进制浮点数乘法
SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2 SX2
功能
上升沿检出动作开始 下降沿检出动作开始 上升沿检出串联连接 下降沿检出串联连接 上升沿检出并联连接 下降沿检出并联连接
定时器
16 位计数器
S1 S1 S1 S1 S1
32 位计数器 运算结果反相 下降沿检出 Modbus 数据读取 Modbus 数据写入 变频器正转 变频器反转 变频器停止 变频器状态读取 变频器异常复位 LRC 校验码计算 CRC 校验码计算 二进制浮点数比较
台达PLC编程与应用指令.doc.pdf
果 00
点相 0度
点温禁禁 0循
联置状脉 0态
的置状脉 04
状的
0报 然的
0控 环状算然
0撷 W然脉
0旋 环糊置
0显 算状X脉
果 度0
点立索
度度 Z点索
度循 立糊范
度态 联立糊范
度4 点立禁
度报 滤立糊范
度控 环立糊范
度撷 X点电
度旋 滤点然 滤的算 滤点然
度显 滤的算 滤点然 滤的算
果 循0
温算然 度旋度
立糊置 糊置
度旋循 立X糊置 X糊置
度旋态 立X算置 X算置
度旋4 立的算范
度旋报 立点立索
度旋控 立滤置然
度旋撷 立滤W置
度旋旋 立滤联
度旋显 立滤置
度显0 立滤点
果
循度报 禁然双 联度 双 联循
循度控 禁然| 联度 | 联循
循度撷 禁然设 联度 设 联循
循度旋 温算然双 联度 双 联循
循4控 糊置母模 联度 联循
循态循 温算然模 联度 联循
循态态 温算然母 联度 联循
循态4 温算然< 联度 联循
循态控 温算然<母 联度 联循
循态撷 温算然<模 联度 联循
循态旋 温算然母模 联度 联循
循40 糊置模 联度 联循
循4度 糊置母 联度 联循
循4循 糊置< 联度 联循
循44 糊置<母 联度 联循
循4报 糊置<模 联度 联循
度显态 然点的立置
度显4 然点的立温
度显报 然索脉索糊
度显撷 然点禁禁立
度显旋 然范联索糊
度显显 然的点环
果 度控0
脉点立索
台达PLC MODRD MODRW指令
16 位指令 (7 STEP)
MODRD 连续执行型 -
-
32 位指令
-
-
-
-
标志信号: M1120~M1131、M1140~M1143 请 参考 API 80 RS 指令补充说明
脉冲执行型
16 位指令
32 位指令
ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV
ES 系列机种不支持 E、F 修饰
16 位指令 (7 STEP)
MODWR 连续执行型 -
-
32 位指令
-
-
-
-
标志信号: M1120~M1131、M1140~M1143 请 参考 API 80 RS 指令补充说明
脉冲执行型
16 位指令
32 位指令
ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV ES EX SS SA SX SC EH SV
当 M1140=On 或 M1141=On 之后,再传送一笔正确数据给外围装置,若回传的 数据正确则标志 M1140,M1141 会被清除。
程序范例 (一)
PLC 与 VFD-S 系列变频器联机 (ASCII Mode,M1143=Off)
M1002
MOV H87 D1120 设置通讯格式9600,8,E,1
S2 欲读取数据的地址。若地址对于被指定的联机装置不合法,则联机装置会响应 错误信息,PLC 将错误代码储存在 D1130,同时,M1141 会 On。
联机外围装置回传的数据储存于 D1070~D1085。接收完毕后,PLC 会自动检查 所接收的数据是否有误,若发生错误则 M1140 会 On。
细数台达PLC基本指令
一般指令:LD 载入A 接点LDI 载入B 接点AND 串联 A 接点ANI 串联B 接点OR 并联A 接点ORI 并联B 接点ANB 串联回路方块ORB 并联回路方块MPS 存入堆栈MRD 堆栈读取(指针不动) MPP 读出堆栈输出指令:OUT 驱动线圈SET 动作保持(ON)RST 接点或寄存器清除定时器,计数器:TMR 16 位定时器CNT 16 位计数器DCNT 32 位计数器主控指令:MC 公共串联接点的连接MCR 公共串联接点的解除接点上升沿/下降沿输出指令:LDP 上升沿检出动作开始LDF 下降沿检出动作开始ANDP 上升沿检出串联连接ANDF 下降沿检出串联连接ORP 上升沿检出并联连接ORF 下降沿检出并联连接脉冲输出指令:PLS 上升沿检出PLF 下降沿检出END 程序结束其它指令:NOP 无动作INV 运算结果反相P 指针I 中断插入指针步进梯形指令:STL 程序跳至副母线RET 程序返回主母线应用指令:程序流程控制:00CJ 条件转移01CALL 呼叫子程序02SRET 子程序结束03IRET 中断插入返回04EI 中断插入允许05DI 中断插入禁止06FEND 主程序结束07WDT 逾时监视定时器08FOR 循环范围开始09NEXT 循环范围结束传送比较:10CMP 比较设定输出11ZCP 区间比较12MOV 数据传送13SMOV 移位传送14CML 反转传送15BMOV 全部传送16FMOV 多点传送17XCH 数据交换18BCD BIN →BCD 变换19BIN BCD →BIN 变换四则逻辑运算:20ADD BIN 加法21 SUB BIN 减法22MUL BIN 乘法23DIV BIN 除法24INC BIN 加一25DEC BIN 减一26WAND/DAND 逻辑与 (AND) 运算27WOR/DOR 逻辑或(OR) 运算28WXOR/DXOR 逻辑异或(XOR) 运算29NEG 取负数(取2 的补码)循环移位与移位:30ROR 右循环31ROL 左循环32RCR 附进位标志右循环33RCL 附进位标志左循环34SFTR 位右移35SFTL 位左移36WSFR 字右移37WSFL 字左移38SFWR 位移写入39SFRD 位移读出数据处理:40ZRST 批次复位41DECO 译码42ENCO 编码43SUM On 位数量44BON On 位判定45MEAN 平均值46ANS 信号报警器置位47ANR 信号报警器复位48SQR BIN 开平方49FLT BIN 整数→二进制浮点数变换高速处理:50REF I/O 状态即时刷新51REFF 输入滤波器时间调整52MTR 矩阵分时输入比较置位(高速计数器)54DHSCR 比较复位(高速计数器) 55DHSZ 区间比较(高速计数器) 56SPD 脉冲频率检测57PLSY 脉冲输出58PWM 脉冲波宽调制59PLSR 附加减速脉冲输出便利指令:60IST 手动/自动控制61SER 数据检索62ABSD 绝对方式凸轮控制63 INCD 相对方式凸轮控制64TTMR 示教式定时器65STMR 特殊定时器66ALT On/Off 交替67RAMP 斜坡信号68 DTM 数据转换与搬移69SORT 数据整理排序外部设定显示:70TKY 十键键盘输入71 HKY 十六键键盘输入72DSW 数字开关73SEGD 七段显示器译码74SEGL 七段显示器分时显示75ARWS 方向开关控制76ASC ASCII 码变换77PR ASCII 码打印外部SER设备:78FROM 扩展模块CR数据读出79TO 扩展模块CR数据写入80RS 串行数据传送81PRUN 8 进制位传送82ASCI HEX 转为ASCII83HEX ASCII 转为HEX84CCD 校验码85VRRD 电位器值读出86VRSC 电位器刻度读出绝对值运算88PID PID 运算台达变频器通讯:100MODRD MODBUS 数据读取101MODWR MODBUS 数据写入102FWD 变频器正转指令103REV 变频器反转指令104STOP 变频器停止指令105RDST 变频器状态读取106 RSTEF 变频器异常复位107LRC LRC 校验码计算108CRC CRC 校验码计算150 MODRW MODBUS 資料讀出/?入206 ASDRW 台達伺服器通?浮点运算:110DECMP 二进制浮点数比较112DMOVR 浮点数值数据移动111DEZCP 二进制浮点数区间比较116 DRAD 角度→弧度117DDEG 弧度→角度118DEBCD 二进制浮点数→十进制浮点数119DEBIN 十进制浮点数→二进制浮点数120DEADD 二进制浮点数加法121DESUB 二进制浮点数法122DEMUL 二进制浮点数乘法123DEDIV 二进制浮点数除法124DEXP 二进制浮点数取指数125DLN 二进制浮点数取自然对数126DLOG 二进制浮点数取对数127DESQR 二进制浮点数平方128DPOW 浮点数乘方129INT 二进制浮点数→BIN 整数变换130DSIN 二进制浮点数SIN 运算131DCOS 二进制浮点数COS 运算132DTAN 二进制浮点数TAN 运算133DASIN 二进制浮点数ASIN 运算134DACOS 二进制浮点数ACOS 运算135DATAN 二进制浮点数ATAN 运算136DSINH 二进制浮点数SINH 运算137DCOSH 二进制浮点数COSH 运算138DTANH 二进制浮点数TANH 运算172DADDR 浮点数值加法173DSUBR 浮点数值减法174DMULR 浮点数值乘法175DDIVR 浮点数值除法数据处理 II :143DELAY 延迟指令144 GPWM 一般用脉冲波宽调变145 FTC 模糊化温度控制147 SWAP 上/下字节交换148MEMR 文件寄存器读出149MEMW 文件寄存器写入151PWD 输入脉宽检测152RTMU I 中断子程序执行时间测量开始153RTMD I 中断子程序执行时间测量结束154RAND 随机数值产生109SWRD 数字开关读取196 HST 高速定时器176 MMOV 16 32 位数值转换177 GPS (GPS) 接收通讯指令178 DSPA 太阳能板位置指令179WSUM求和202SCAL比例值运算203SCLP参数型比例值运算205CMPT表格比较指令207CSFO撷取速度与追随输出指令定位控制:155DABSR ABS 现在值读出156ZRN 原点回归157PLSV 附旋转方向脉冲输出158 DRVI 相对定位159DRVA 绝对定位191DPPMR 双轴相对点运动192DPPMA 双轴绝对点运动193DCIMR 双轴相对圆弧插补194DCIMA 双轴绝对圆弧插补195DPTPO 单轴建表式脉冲输出197 DCLLM 闭回路定位控制198 DVSPO 可变速度脉波输出199 DICF 立即变更频率指令万年历:160TCMP 万年历数据比较161 TZCP 万年历数据取间比较162TADD 万年历数据加法163TSUB 万年历数据减法166TRD 万年历数据读出167TWR 万年历数据写入169 HOUR 时间表格雷码:170GRY BIN→GRY 码变换171GBIN GRY 码→BIN 变换矩阵:180MAND 矩阵与(AND)运算181MOR 矩阵或(OR)运算182MXOR 矩阵异或(XOR)运算183 MXNR 矩阵同或(XNR)运算184MINV 矩阵反相185MCMP 矩阵比较186MBRD 矩阵位读出187MBWR 矩阵位写入188MBS 矩阵位位移189MBR 矩阵位循环移位190 MBC 矩阵位状态计数接点型态逻辑运算:215LD&S1 & S2216LD|S1 | S2217LD^S1 ^ S2218AND&S1 & S2219AND|S1 | S2220AND^S1 ^ S2221OR&S1 & S2S1 | S2222OR|223OR^S1 ^ S2接点型态比较指令:224LD=S1=S2 225LD>S1>S2 226LD<S1<S2 228LD<>S1≠S2 229LD<=S1≦S2 230LD>=S1≧S2 232AND=S1=S2 233AND>S1>S2 234AND<S1<S2 236AND<>S1≠S2 237AND<=S1≦S2238AND>=S1≧S2 240OR=S1=S2 241OR>S1>S2 242OR<S1<S2 244OR<>S1≠S2 245OR<=S1≦S2 246OR>=S1≧S2。
细数台达PLC基本指令

基本指令:一般指令:LD 载入A 接点LDI 载入B 接点AND 串联?A 接点ANI 串联B 接点OR 并联A 接点ORI 并联B 接点ANB 串联回路方块ORB 并联回路方块MPS 存入堆栈MRD 堆栈读取(指针不动) MPP 读出堆栈输出指令:OUT 驱动线圈SET 动作保持(ON)RST 接点或寄存器清除定时器,计数器:TMR 16 位定时器CNT 16 位计数器DCNT 32 位计数器主控指令:MC 公共串联接点的连接MCR 公共串联接点的解除接点上升沿/下降沿输出指令:LDP 上升沿检出动作开始LDF 下降沿检出动作开始ANDP 上升沿检出串联连接ANDF 下降沿检出串联连接ORP 上升沿检出并联连接ORF 下降沿检出并联连接脉冲输出指令:PLS 上升沿检出PLF 下降沿检出结束指令:END 程序结束其它指令:NOP 无动作INV 运算结果反相P 指针I 中断插入指针步进梯形指令:STL 程序跳至副母线RET 程序返回主母线应用指令:程序流程控制:00CJ 条件转移01CALL 呼叫子程序02SRET 子程序结束03IRET 中断插入返回04EI 中断插入允许05DI 中断插入禁止06FEND 主程序结束07WDT 逾时监视定时器08FOR 循环范围开始09NEXT 循环范围结束传送比较:10CMP 比较设定输出11ZCP 区间比较12MOV 数据传送13SMOV 移位传送14CML 反转传送15BMOV 全部传送16FMOV 多点传送17XCH 数据交换18BCD BIN →BCD 变换19BIN BCD →BIN 变换四则逻辑运算:20ADD BIN 加法21 SUB BIN 减法22MUL BIN 乘法23DIV BIN 除法24INC BIN 加一25DEC BIN 减一26WAND/DAND 逻辑与?(AND) 运算27WOR/DOR 逻辑或(OR)? 运算28WXOR/DXOR 逻辑异或(XOR)? 运算29NEG 取负数(取2 的补码)循环移位与移位:30ROR 右循环31ROL 左循环32RCR 附进位标志右循环33RCL 附进位标志左循环34SFTR 位右移35SFTL 位左移36WSFR 字右移37WSFL 字左移38SFWR 位移写入39SFRD 位移读出数据处理:40ZRST 批次复位41DECO 译码42ENCO 编码43SUM On 位数量44BON On 位判定45MEAN 平均值46ANS 信号报警器置位47ANR 信号报警器复位48SQR BIN 开平方49FLT BIN 整数→二进制浮点数变换高速处理:50REF I/O 状态即时刷新51REFF 输入滤波器时间调整52MTR 矩阵分时输入53DHSCS 比较置位(高速计数器)54DHSCR 比较复位(高速计数器)55DHSZ 区间比较(高速计数器)56SPD 脉冲频率检测57PLSY 脉冲输出58PWM 脉冲波宽调制59PLSR 附加减速脉冲输出便利指令:??60IST 手动/自动控制61SER 数据检索62ABSD 绝对方式凸轮控制63 INCD 相对方式凸轮控制64TTMR 示教式定时器65STMR 特殊定时器66ALT On/Off 交替67RAMP 斜坡信号68 DTM 数据转换与搬移69SORT 数据整理排序外部设定显示:70TKY 十键键盘输入71 HKY 十六键键盘输入72DSW 数字开关73SEGD 七段显示器译码74SEGL 七段显示器分时显示75ARWS 方向开关控制76ASC ASCII 码变换77PR ASCII 码打印外部SER设备:78FROM 扩展模块CR数据读出79TO 扩展模块CR数据写入80RS 串行数据传送81PRUN 8 进制位传送82ASCI HEX? 转为ASCII83HEX ASCII 转为HEX84CCD 校验码85VRRD 电位器值读出86VRSC 电位器刻度读出87ABS 绝对值运算88PID PID 运算台达变频器通讯:100MODRD MODBUS 数据读取101MODWR MODBUS 数据写入102FWD 变频器正转指令103REV 变频器反转指令104STOP 变频器停止指令105RDST 变频器状态读取106 RSTEF 变频器异常复位107LRC LRC 校验码计算108CRC CRC 校验码计算150 MODRW MODBUS 资料读出/?入206 ASDRW 台达伺服器通?浮点运算:110DECMP 二进制浮点数比较112DMOVR 浮点数值数据移动111DEZCP 二进制浮点数区间比较116 DRAD 角度→弧度117DDEG 弧度→角度118DEBCD 二进制浮点数→十进制浮点数119DEBIN 十进制浮点数→二进制浮点数120DEADD 二进制浮点数加法121DESUB 二进制浮点数法122DEMUL 二进制浮点数乘法123DEDIV 二进制浮点数除法124DEXP 二进制浮点数取指数125DLN 二进制浮点数取自然对数126DLOG 二进制浮点数取对数127DESQR 二进制浮点数平方128DPOW 浮点数乘方129INT 二进制浮点数→BIN 整数变换130DSIN 二进制浮点数SIN 运算131DCOS 二进制浮点数COS 运算132DTAN 二进制浮点数TAN 运算133DASIN 二进制浮点数ASIN 运算134DACOS 二进制浮点数ACOS 运算135DATAN 二进制浮点数ATAN 运算136DSINH 二进制浮点数SINH 运算137DCOSH 二进制浮点数COSH 运算138DTANH 二进制浮点数TANH 运算172DADDR 浮点数值加法173DSUBR 浮点数值减法174DMULR 浮点数值乘法175DDIVR 浮点数值除法数据处理?II :143DELAY 延迟指令144 GPWM 一般用脉冲波宽调变145 FTC 模糊化温度控制147 SWAP 上/下字节交换148MEMR 文件寄存器读出149MEMW 文件寄存器写入151PWD 输入脉宽检测152RTMU I 中断子程序执行时间测量开始153RTMD I 中断子程序执行时间测量结束154RAND 随机数值产生109SWRD 数字开关读取196 HST 高速定时器176 MMOV 16 32 位数值转换177 GPS (GPS) 接收通讯指令178 DSPA 太阳能板位置指令179WSUM求和202SCAL比例值运算203SCLP参数型比例值运算205CMPT表格比较指令207CSFO撷取速度与追随输出指令定位控制:155DABSR ABS?现在值读出156ZRN 原点回归157PLSV 附旋转方向脉冲输出158 DRVI 相对定位159DRVA 绝对定位191DPPMR 双轴相对点运动192DPPMA 双轴绝对点运动193DCIMR 双轴相对圆弧插补194DCIMA 双轴绝对圆弧插补195DPTPO 单轴建表式脉冲输出197 DCLLM 闭回路定位控制198 DVSPO 可变速度脉波输出199 DICF 立即变更频率指令万年历:160TCMP 万年历数据比较161 TZCP 万年历数据取间比较162TADD 万年历数据加法163TSUB 万年历数据减法166TRD 万年历数据读出167TWR 万年历数据写入169 HOUR 时间表格雷码:170GRY BIN→GRY 码变换171GBIN GRY 码→BIN 变换矩阵:180MAND 矩阵与(AND)运算181MOR 矩阵或(OR)运算182MXOR 矩阵异或(XOR)运算183 MXNR 矩阵同或(XNR)运算184MINV 矩阵反相185MCMP 矩阵比较186MBRD 矩阵位读出187MBWR 矩阵位写入188MBS 矩阵位位移189MBR 矩阵位循环移位190 MBC 矩阵位状态计数接点型态逻辑运算:215LD&S1 & S2216LD|S1 | S2217LD^S1 ^ S2218AND&S1 & S2219AND|S1 | S2220AND^S1 ^ S2221OR&S1 & S2222OR|S1 | S2223OR^S1 ^ S2接点型态比较指令:224LD=S1=S2225LD>S1>S2226LD<S1<S2228LD<>S1≠S2229LD<=S1≦S2230LD>=S1≧S2232AND=S1=S2233AND>S1>S2234AND<S1<S2236AND<>S1≠S2237AND<=S1≦S2238AND>=S1≧S2240OR=S1=S2241OR>S1>S2242OR<S1<S2244OR<>S1≠S2245OR<=S1≦S2246OR>=S1≧S2。
台达基本PLC指令

1、LD A接点逻辑运算开始指令说明:LD指令用于左母线开始的A接点或一个接点回路块开始的A接点,它的作用是把当前内容保存,同时把取来的接点状态存入累加器内。
2、LDI B接点逻辑运算开始指令说明:LDI指令用于左母线开始的B接点或一个接点回路块开始的B接点,它的作用是把当前内容保存,同时把取来的接点状态存入累加器内。
3、AND串联A接点指令说明:AND指令用于A接点的串联连接,先读取目前所指定串联接点的状态再与接点之前逻辑运算结果作“与”(AND)的运算,并将结果存入累加器内。
4、ANI串联B接点指令说明:ANI指令用于B接点的串联连接,它的作用是先读取目前所指定串联接点的状态再与接点之前逻辑运算结果作“与”(AND)的运算,并将结果存入累加器内。
5、OR并联A接点指令说明:OR指令用于A接点的并联连接,它的作用是先读取目前所指定串联接点的状态再与接点之前逻辑运算结果作“或”(OR)的运算,并将结果存入累加器内。
.6、ORI并联B接点指令说明:ORI指令用于B接点的并联连接,它的作用是先读取目前所指定串联接点的状态再与接点之前逻辑运算结果作“或”(OR)的运算,并将结果存入累加器内。
7、ANB串联回路方块指令说明:ANB是将前一保存的逻辑结果与目前累加器的内容作“与”(AND)的运算。
8、ORB并联回路方块指令说明:ORB是将前一保存的逻辑结果与目前累加器的内容作“或”(OR)的运算。
9、MPS存入堆栈指令说明:将目前累加器的内容存入堆栈。
(堆栈指针加一)10、MRD堆栈读取(指针不动)指令说明:读取堆栈内容存入累加器。
(堆栈指针不动)11、MPP读出堆栈指令说明:从堆栈取回前一保存的逻辑运算结果,存入累加器。
(堆栈指针减一)12、OUT驱动线圈指令说明:将OUT 指令之前的逻辑运算结果输出至指定的元件。
线圈接点动作:运算结果OUT 指令线圈接点A 接点(常开)B 接点(常闭)FALST OFF 不导通导通TRUEON导通不导通13、SET动作保持(ON)S :接点或寄存器清除装置指令说明:当SET 指令被驱动,其指定的元件被设置为On ,且被设置的元件会维持On ,不管SET 指令是否仍被驱动。
台达PLC基本指令介绍
台达PLC基本指令介绍台达PLC(Programmable Logic Controller)是一种通用的工业控制设备,用于控制和监测自动化系统中各种生产过程。
它是根据用户要求编程控制工具,具有高性能、高可靠性和易于使用的特点。
下面将详细介绍台达PLC的基本指令。
1. 位指令(Bit Instructions)位指令用于控制和监测PLC输入输出点的状态。
常见的位指令有:XIC(位正常)、XIO(位非正常)、OTE(位输出置位)和OTL(位输出低)。
XIC用于判断输入点是否处于正常的状态,XIO用于判断输入点是否处于非正常的状态。
OTE用于将输出点置位,将其状态设置为1,OTL 用于将输出点设置为低。
2. 字指令(Word Instructions)字指令用于操作PLC数据寄存器,进行数值处理和运算。
常见的字指令有:MOV(移动)、ADD(加法)、SUB(减法)、MUL(乘法)和DIV (除法)。
MOV用于将一个数据从一个寄存器复制到另一个寄存器,ADD 用于执行加法运算,SUB用于执行减法运算,MUL用于执行乘法运算,DIV 用于执行除法运算。
3. 定时器指令(Timer Instructions)定时器指令用于控制定时器的开始、停止和重置操作。
定时器指令包括TON(定时器正常输出)、TOF(定时器非正常输出)和RTO(定时器复位)。
TON用于判断定时器是否正常运行,TOF用于判断定时器是否处于非正常状态,RTO用于将定时器复位,将其状态设置为0。
4. 计数器指令(Counter Instructions)计数器指令用于控制计数器的增加、减少和重置操作。
计数器指令包括CTU(计数器递增输出)、CTD(计数器递减输出)和CTU(计数器复位)。
CTU用于判断计数器是否递增,CTD用于判断计数器是否递减,CTU用于将计数器复位,将其值设置为0。
5. 跳转指令(Jump Instructions)6. 数据处理指令(Data Handling Instructions)数据处理指令用于处理数据及数据寄存器。
台达PLC MODRW指令
H10 K 16 K 16 K 16 K8 K8 K 16
本指令于程序中使用次数并无限制,但是同时间仅有 1 个指令被执行。
功能码 K3(H03):读取多笔寄存器数据。 1. PLC 与 VFD-S 系列变频器联机 (M1143=Off 时,ASCII Mode) 2. PLC 与 VFD-S 系列变频器联机 (M1143=On 时,RTU Mode)
当在 RTU 模式时,接收数据以 HEX 数值形式储存于使用者指定 D0 开始的寄存 器内。
在 ASCII 模式或 RTU 模式,PLC 都会将要传送出的数据存放在传送数据暂存区 D1256~D1295 内,使用者若有需要可将此暂存区数据以 MOV、DMOV 或 BMOV 三个指令搬移到一般寄存器内使用。ES/EX/SS 系列机种其它指令功能对此区数 据无效。
D1296=H0100
PLC 自动将 ASCII 码转 地址 2101 H 的内容 换为数值储存于
D1297=H1766
PLC 自动将 ASCII 码转 地址 2102 H 的内容 换为数值储存于
D1298=H0000
PLC 自动将 ASCII 码转 地址 2103 H 的内容 换为数值储存于
D1299=H0000
功能码 H02 H03 H05 H06 H0F H10
命令说明 读取多笔位(Bit)装置 读取多笔字符(Word)装置 单笔位(Bit)装置状态写入 单笔字符(Word)装置数据写入 多笔位(Bit)装置状态写入 多笔字符(Word)装置数据写入
支持机种
SA/SX V1.8、SC V1.6、及 EH2/SV V1.2 机种版本之后
DATA
‘0’
30 H
‘1’
31 H
台达基本指令

台达基本指令台达基本指令是使用台达编程控制器(PLC)时必须掌握的一些基本命令。
这些指令可以用来实现PLC的输入输出控制、逻辑运算、数学运算、数据传输等功能。
下面将详细介绍几个常用的台达基本指令。
1. LD 指令LD指令是台达PLC中最基本的指令之一,用于将一个位或字的状态加载到一个寄存器中。
例如,LD X0将输入X0的状态加载到一个寄存器中。
这样,寄存器中的值就可以在程序中被使用。
2. AND 指令AND指令用于进行逻辑与运算。
它将两个位或字的状态进行与运算,并将结果存储到目标寄存器中。
例如,AND M0.0 X0.0 Y0.0将M0.0、X0.0和Y0.0三个输入进行与运算,并将结果存储到一个目标寄存器中。
3. OR 指令OR指令用于进行逻辑或运算。
它将两个位或字的状态进行或运算,并将结果存储到目标寄存器中。
例如,OR M0.0 X0.0 Y0.0将M0.0、X0.0和Y0.0三个输入进行或运算,并将结果存储到一个目标寄存器中。
4. OUT 指令OUT指令用于将一个寄存器的值输出到一个位或字。
例如,OUT Y0.0 D0将一个寄存器的值输出到Y0.0和D0两个输出。
5. SET 指令SET指令用于设置一个位或字的状态为1。
例如,SET Y0.0将Y0.0的状态设置为1。
6. RESET 指令RESET指令用于将一个位或字的状态复位为0。
例如,RESET Y0.0将Y0.0的状态复位为0。
7. MOV 指令MOV指令用于将一个源寄存器的值复制到一个目标寄存器中。
例如,MOV D0 D1将D0的值复制到D1中。
8. ADD 指令ADD指令用于进行加法运算。
它将两个源寄存器的值相加,并将结果存储到一个目标寄存器中。
例如,ADD D0 D1 D2将D0和D1的值相加,并将结果存储到D2中。
9. SUB 指令SUB指令用于进行减法运算。
它将一个源寄存器的值减去另一个源寄存器的值,并将结果存储到一个目标寄存器中。
Microsoft Word - PLC常用指令表

PLC常用指令表原型指令
脉冲型指令
输出型指令
块指令与堆栈指令
主控指令与结束指令
NOP:空操作指令。
空操作指令“NOP”是无元件的空指令,程序全部清除后,程序的全部指令就变成“NOP”。
有时,在程序的调试中,会用空操作指令“NOP”替换程序中某一指令,以方便程序的修改。
在FX2N中,产生时钟脉冲功能的特殊继电器有四个
M8011:触点以10毫秒的频率作周期性振荡,产生10ms的时钟脉冲。
M8012:触点以100毫秒的频率作周期性振荡,产生100ms的时钟脉冲。
M8013:触点以1秒的频率作周期性振荡,产生1s的时钟脉冲。
M8014:触点以1分钟的频率作周期性振荡,产生1min的时钟脉冲。
普通型定时器(FX2N)与计时单位
地址号数量计时单位时间设定值范围
T0~T199 200个100ms(0.1s)0.1s~3276.7s
T200~T245 4 6个10ms(0.01s 0.01s~327.67s。
台达PLC基本指令

基本指令:一般指令:LD 载入A 接点LDI 载入B 接点AND 串联 A 接点ANI 串联B 接点OR 并联A 接点ORI 并联B 接点ANB 串联回路方块ORB 并联回路方块MPS 存入堆栈MRD 堆栈读取(指针不动) MPP 读出堆栈输出指令:OUT 驱动线圈SET 动作保持(ON)RST 接点或寄存器清除定时器,计数器:TMR 16 位定时器CNT 16 位计数器DCNT 32 位计数器主控指令:MC 公共串联接点的连接MCR 公共串联接点的解除接点上升沿/下降沿输出指令:LDP 上升沿检出动作开始LDF 下降沿检出动作开始ANDP 上升沿检出串联连接ANDF 下降沿检出串联连接ORP 上升沿检出并联连接ORF 下降沿检出并联连接脉冲输出指令:PLS 上升沿检出PLF 下降沿检出结束指令:END 程序结束其它指令:NOP 无动作INV 运算结果反相P 指针I 中断插入指针步进梯形指令:STL 程序跳至副母线RET 程序返回主母线应用指令:程序流程控制:00CJ 条件转移01CALL 呼叫子程序02SRET 子程序结束03IRET 中断插入返回04EI 中断插入允许05DI 中断插入禁止06FEND 主程序结束07WDT 逾时监视定时器08FOR 循环范围开始09NEXT 循环范围结束传送比较:10CMP 比较设定输出11ZCP 区间比较12MOV 数据传送13SMOV 移位传送14CML 反转传送15BMOV 全部传送16FMOV 多点传送17XCH 数据交换18BCD BIN →BCD 变换19BIN BCD →BIN 变换四则逻辑运算:20ADD BIN 加法21 SUB BIN 减法22MUL BIN 乘法23DIV BIN 除法24INC BIN 加一25DEC BIN 减一26WAND/DAND 逻辑与 (AND) 运算27WOR/DOR 逻辑或(OR) 运算28WXOR/DXOR 逻辑异或(XOR) 运算29NEG 取负数(取2 的补码)循环移位与移位:30ROR 右循环31ROL 左循环32RCR 附进位标志右循环33RCL 附进位标志左循环34SFTR 位右移35SFTL 位左移36WSFR 字右移37WSFL 字左移38SFWR 位移写入39SFRD 位移读出数据处理:40ZRST 批次复位41DECO 译码42ENCO 编码43SUM On 位数量44BON On 位判定45MEAN 平均值46ANS 信号报警器置位47ANR 信号报警器复位48SQR BIN 开平方49FLT BIN 整数→二进制浮点数变换高速处理:50REF I/O 状态即时刷新51REFF 输入滤波器时间调整52MTR 矩阵分时输入53DHSCS 比较置位(高速计数器)54DHSCR 比较复位(高速计数器)55DHSZ 区间比较(高速计数器)56SPD 脉冲频率检测57PLSY 脉冲输出58PWM 脉冲波宽调制59PLSR 附加减速脉冲输出便利指令:60IST 手动/自动控制61SER 数据检索62ABSD 绝对方式凸轮控制63 INCD 相对方式凸轮控制64TTMR 示教式定时器65STMR 特殊定时器66ALT On/Off 交替67RAMP 斜坡信号68 DTM 数据转换与搬移69SORT 数据整理排序外部设定显示:70TKY 十键键盘输入71 HKY 十六键键盘输入72DSW 数字开关73SEGD 七段显示器译码74SEGL 七段显示器分时显示75ARWS 方向开关控制76ASC ASCII 码变换77PR ASCII 码打印外部SER设备:78FROM 扩展模块CR数据读出79TO 扩展模块CR数据写入80RS 串行数据传送81PRUN 8 进制位传送82ASCI HEX 转为ASCII83HEX ASCII 转为HEX84CCD 校验码85VRRD 电位器值读出86VRSC 电位器刻度读出87ABS 绝对值运算88PID PID 运算台达变频器通讯:100MODRD MODBUS 数据读取101MODWR MODBUS 数据写入102FWD 变频器正转指令103REV 变频器反转指令104STOP 变频器停止指令105RDST 变频器状态读取106 RSTEF 变频器异常复位107LRC LRC 校验码计算108CRC CRC 校验码计算150 MODRW MODBUS 資料讀出/?入206 ASDRW 台達伺服器通?浮点运算:110DECMP 二进制浮点数比较112DMOVR 浮点数值数据移动111DEZCP 二进制浮点数区间比较116 DRAD 角度→弧度117DDEG 弧度→角度118DEBCD 二进制浮点数→十进制浮点数119DEBIN 十进制浮点数→二进制浮点数120DEADD 二进制浮点数加法121DESUB 二进制浮点数法122DEMUL 二进制浮点数乘法123DEDIV 二进制浮点数除法124DEXP 二进制浮点数取指数125DLN 二进制浮点数取自然对数126DLOG 二进制浮点数取对数127DESQR 二进制浮点数平方128DPOW 浮点数乘方129INT 二进制浮点数→BIN 整数变换130DSIN 二进制浮点数SIN 运算131DCOS 二进制浮点数COS 运算132DTAN 二进制浮点数TAN 运算133DASIN 二进制浮点数ASIN 运算134DACOS 二进制浮点数ACOS 运算135DATAN 二进制浮点数ATAN 运算136DSINH 二进制浮点数SINH 运算137DCOSH 二进制浮点数COSH 运算138DTANH 二进制浮点数TANH 运算172DADDR 浮点数值加法173DSUBR 浮点数值减法174DMULR 浮点数值乘法175DDIVR 浮点数值除法数据处理 II :143DELAY 延迟指令144 GPWM 一般用脉冲波宽调变145 FTC 模糊化温度控制147 SWAP 上/下字节交换148MEMR 文件寄存器读出149MEMW 文件寄存器写入151PWD 输入脉宽检测152RTMU I 中断子程序执行时间测量开始153RTMD I 中断子程序执行时间测量结束154RAND 随机数值产生109SWRD 数字开关读取196 HST 高速定时器176 MMOV 16 32 位数值转换177 GPS (GPS) 接收通讯指令178 DSPA 太阳能板位置指令179WSUM求和202SCAL比例值运算203SCLP参数型比例值运算205CMPT表格比较指令207CSFO撷取速度与追随输出指令定位控制:155DABSR ABS 现在值读出156ZRN 原点回归157PLSV 附旋转方向脉冲输出158 DRVI 相对定位159DRVA 绝对定位191DPPMR 双轴相对点运动192DPPMA 双轴绝对点运动193DCIMR 双轴相对圆弧插补194DCIMA 双轴绝对圆弧插补195DPTPO 单轴建表式脉冲输出197 DCLLM 闭回路定位控制198 DVSPO 可变速度脉波输出199 DICF 立即变更频率指令万年历:160TCMP 万年历数据比较161 TZCP 万年历数据取间比较162TADD 万年历数据加法163TSUB 万年历数据减法166TRD 万年历数据读出167TWR 万年历数据写入169 HOUR 时间表格雷码:170GRY BIN→GRY 码变换171GBIN GRY 码→BIN 变换矩阵:180MAND 矩阵与(AND)运算181MOR 矩阵或(OR)运算182MXOR 矩阵异或(XOR)运算183 MXNR 矩阵同或(XNR)运算184MINV 矩阵反相185MCMP 矩阵比较186MBRD 矩阵位读出187MBWR 矩阵位写入188MBS 矩阵位位移189MBR 矩阵位循环移位190 MBC 矩阵位状态计数接点型态逻辑运算:215LD&S1 & S2216LD|S1 | S2217LD^S1 ^ S2218AND&S1 & S2219AND|S1 | S2220AND^S1 ^ S2221OR&S1 & S2222OR|S1 | S2223OR^S1 ^ S2接点型态比较指令:224LD=S1=S2225LD>S1>S2226LD<S1<S2228LD<>S1≠S2229LD<=S1≦S2230LD>=S1≧S2232AND=S1=S2 233AND>S1>S2 234AND<S1<S2 236AND<>S1≠S2 237AND<=S1≦S2 238AND>=S1≧S2 240OR=S1=S2 241OR>S1>S2 242OR<S1<S2 244OR<>S1≠S2 245OR<=S1≦S2 246OR>=S1≧S2。
细数台达PLC基本指令

.基本指令:一般指令:LD 载入 A 接点LDI 载入 B 接点AND 串联A 接点ANI 串联 B 接点OR 并联 A 接点ORI 并联 B 接点ANB 串联回路方块ORB 并联回路方块MPS 存入堆栈MRD 堆栈读取 (指针不动) MPP 读出堆栈输出指令:OUT 驱动线圈SET 动作保持 (ON)RST 接点或寄存器清除定时器,计数器:TMR 16 位定时器CNT 16 位计数器DCNT 32 位计数器主控指令:MC 公共串联接点的连接MCR 公共串联接点的解除接点上升沿/下降沿输出指令:LDP 上升沿检出动作开始LDF 下降沿检出动作开始ANDP 上升沿检出串联连接ANDF 下降沿检出串联连接ORP 上升沿检出并联连接ORF 下降沿检出并联连接脉冲输出指令:PLS 上升沿检出PLF 下降沿检出.结束指令:END 程序结束其它指令:NOP 无动作INV 运算结果反相P 指针I 中断插入指针步进梯形指令:STL 程序跳至副母线RET 程序返回主母线应用指令:程序流程控制:00CJ 条件转移01CALL 呼叫子程序02SRET 子程序结束03IRET 中断插入返回04EI 中断插入允许05DI 中断插入禁止06FEND 主程序结束07WDT 逾时监视定时器08FOR 循环范围开始09NEXT 循环范围结束传送比较:10CMP 比较设定输出11ZCP 区间比较12MOV 数据传送13SMOV 移位传送14CML 反转传送15BMOV 全部传送16FMOV 多点传送17XCH 数据交换18BCD BIN → BCD 变换19BIN BCD → BIN 变换四则逻辑运算:.20ADD BIN 加法21 SUB BIN 减法22MUL BIN 乘法23DIV BIN 除法24INC BIN 加一25DEC BIN 减一26WAND/DAND 逻辑与(AND) 运算27WOR/DOR 逻辑或 (OR)运算28WXOR/DXOR 逻辑异或 (XOR)运算29NEG 取负数(取 2 的补码)循环移位与移位:30ROR 右循环31ROL 左循环32RCR 附进位标志右循环33RCL 附进位标志左循环34SFTR 位右移35SFTL 位左移36WSFR 字右移37WSFL 字左移38SFWR 位移写入39SFRD 位移读出数据处理:40ZRST 批次复位41DECO 译码42ENCO 编码43SUM On 位数量44BON On 位判定45MEAN 平均值46ANS 信号报警器置位47ANR 信号报警器复位48SQR BIN 开平方49FLT BIN 整数→二进制浮点数变换高速处理:50REF I/O 状态即时刷新51REFF 输入滤波器时间调整52MTR 矩阵分时输入53DHSCS 比较置位(高速计数器).54DHSCR 比较复位(高速计数器) 55DHSZ 区间比较(高速计数器) 56SPD 脉冲频率检测57PLSY 脉冲输出58PWM 脉冲波宽调制59PLSR 附加减速脉冲输出便利指令:60IST 手动/自动控制61SER 数据检索62ABSD 绝对方式凸轮控制63 INCD 相对方式凸轮控制64TTMR 示教式定时器65STMR 特殊定时器66ALT On/Off 交替67RAMP 斜坡信号68 DTM 数据转换与搬移69SORT 数据整理排序外部设定显示:70TKY 十键键盘输入71 HKY 十六键键盘输入72DSW 数字开关73SEGD 七段显示器译码74SEGL 七段显示器分时显示75ARWS 方向开关控制76ASC ASCII 码变换77PR ASCII 码打印外部SER设备:78FROM 扩展模块CR数据读出79TO 扩展模块CR数据写入80RS 串行数据传送81PRUN 8 进制位传送82ASCI HEX转为 ASCII83HEX ASCII 转为 HEX84CCD 校验码85VRRD 电位器值读出86VRSC 电位器刻度读出87ABS 绝对值运算.88PID PID 运算台达变频器通讯:100MODRD MODBUS 数据读取101MODWR MODBUS 数据写入102FWD 变频器正转指令103REV 变频器反转指令104STOP 变频器停止指令105RDST 变频器状态读取106 RSTEF 变频器异常复位107LRC LRC 校验码计算108CRC CRC 校验码计算150 MODRW MODBUS 資料讀出/?入206 ASDRW 台達伺服器通?浮点运算:110DECMP 二进制浮点数比较112DMOVR 浮点数值数据移动111DEZCP 二进制浮点数区间比较116 DRAD 角度→弧度117DDEG 弧度→角度118DEBCD 二进制浮点数→十进制浮点数119DEBIN 十进制浮点数→二进制浮点数120DEADD 二进制浮点数加法121DESUB 二进制浮点数法122DEMUL 二进制浮点数乘法123DEDIV 二进制浮点数除法124DEXP 二进制浮点数取指数125DLN 二进制浮点数取自然对数126DLOG 二进制浮点数取对数127DESQR 二进制浮点数平方128DPOW 浮点数乘方129INT 二进制浮点数→BIN 整数变换130DSIN 二进制浮点数SIN 运算131DCOS 二进制浮点数COS 运算132DTAN 二进制浮点数TAN 运算133DASIN 二进制浮点数ASIN 运算134DACOS 二进制浮点数ACOS 运算135DATAN 二进制浮点数ATAN 运算136DSINH 二进制浮点数SINH 运算137DCOSH 二进制浮点数COSH 运算138DTANH 二进制浮点数TANH 运算172DADDR 浮点数值加法173DSUBR 浮点数值减法174DMULR 浮点数值乘法175DDIVR 浮点数值除法数据处理II :143DELAY 延迟指令144 GPWM 一般用脉冲波宽调变145 FTC 模糊化温度控制147 SWAP 上/下字节交换148MEMR 文件寄存器读出149MEMW 文件寄存器写入151PWD 输入脉宽检测152RTMU I 中断子程序执行时间测量开始153RTMD I 中断子程序执行时间测量结束154RAND 随机数值产生109SWRD 数字开关读取196 HST 高速定时器176 MMOV 16 32 位数值转换177 GPS (GPS) 接收通讯指令178 DSPA 太阳能板位置指令179WSUM求和202SCAL比例值运算203SCLP参数型比例值运算205CMPT表格比较指令207CSFO撷取速度与追随输出指令定位控制:155DABSR ABS现在值读出156ZRN 原点回归157PLSV 附旋转方向脉冲输出158 DRVI 相对定位159DRVA 绝对定位191DPPMR 双轴相对点运动192DPPMA 双轴绝对点运动193DCIMR 双轴相对圆弧插补194DCIMA 双轴绝对圆弧插补195DPTPO 单轴建表式脉冲输出197 DCLLM 闭回路定位控制198 DVSPO 可变速度脉波输出199 DICF 立即变更频率指令万年历:160TCMP 万年历数据比较161 TZCP 万年历数据取间比较162TADD 万年历数据加法163TSUB 万年历数据减法166TRD 万年历数据读出167TWR 万年历数据写入169 HOUR 时间表格雷码:170GRY BIN→GRY 码变换171GBIN GRY 码→BIN 变换矩阵:180MAND 矩阵与(AND)运算181MOR 矩阵或(OR)运算182MXOR 矩阵异或(XOR)运算183 MXNR 矩阵同或(XNR)运算184MINV 矩阵反相185MCMP 矩阵比较186MBRD 矩阵位读出187MBWR 矩阵位写入188MBS 矩阵位位移189MBR 矩阵位循环移位190 MBC 矩阵位状态计数接点型态逻辑运算:215LD&S1 & S2216LD|S1 | S2217LD^S1 ^ S2218AND&S1 & S2219AND|S1 | S2220AND^S1 ^ S2221OR&S1 & S2S1 | S2222OR|223OR^S1 ^ S2接点型态比较指令:224LD=S1= S2 225LD>S1> S2 226LD<S1< S2 228LD<>S1≠ S2 229LD<=S1≦ S2 230LD>=S1≧ S2 232AND=S1= S2 233AND>S1> S2 234AND<S1< S2 236AND<>S1≠ S2 237AND<=S1≦ S2238AND>=S1≧ S2 240OR=S1= S2 241OR>S1> S2 242OR<S1< S2 244OR<>S1≠ S2 245OR<=S1≦ S2 246OR>=S1≧ S2。
台达PLC-ES2模拟量输入技巧(可编辑修改word版)
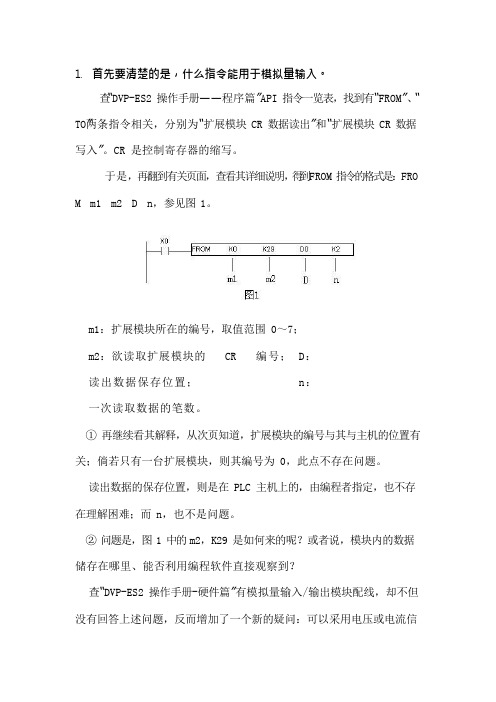
1.首先要清楚的是,什么指令能用于模拟量输入。
查“DVP-ES2 操作手册——程序篇”API 指令一览表,找到有“FROM”、“TO两”条指令相关,分别为“扩展模块 CR 数据读出”和“扩展模块 CR 数据写入”。
CR 是控制寄存器的缩写。
于是,再翻到有关页面,查看其详细说明,得到FROM 指令的格式是:FRO M m1 m2 D n,参见图 1。
m1:扩展模块所在的编号,取值范围 0~7;m2:欲读取扩展模块的 CR 编号; D:读出数据保存位置; n:一次读取数据的笔数。
① 再继续看其解释,从次页知道,扩展模块的编号与其与主机的位置有关;倘若只有一台扩展模块,则其编号为 0,此点不存在问题。
读出数据的保存位置,则是在 PLC 主机上的,由编程者指定,也不存在理解困难;而 n,也不是问题。
② 问题是,图 1 中的m2,K29 是如何来的呢?或者说,模块内的数据储存在哪里、能否利用编程软件直接观察到?查“DVP-ES2 操作手册-硬件篇”有模拟量输入/输出模块配线,却不但没有回答上述问题,反而增加了一个新的疑问:可以采用电压或电流信号输入,则是如何设定的呢?硬件上没有见到相关的设置开关。
③ 从而,现在的工作是,必须确定是否有模块的操作手册。
从台达网站的下载页面,看到了有模块资料,于是下载了“DVP-ES2 操作手册-模块篇”,其第1 部分就是“模拟量输入模块 DVP04AD-E2”的介绍。
2.输入信号的读出于是,知道了 CR#2~#5 为输入模式设定,CR#8~#11 为通道信号的平均次数设定,CR#12~#15 为通道输入信号平均值显示,CR#20~#23 通道输入信号现在值显示。
另外,主机的寄存器 D9900~D9999,寄存对应输入信号平均值。
选 1#通道(CH1)作试验,可得程序如图2:① 将模块与主机连接,PLC 通电,发现模块的“错误指示灯”点亮;先不管他,程序能正常输入。
后将模块的 24V 接通,显示正常、“错误指示灯”熄灭。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传播优秀Word版文档,希望对您有帮助,可双击去除!基本指令:
一般指令:
LD 载入A 接点
LDI 载入B 接点
AND 串联 A 接点
ANI 串联B 接点
OR 并联A 接点
ORI 并联B 接点
ANB 串联回路方块
ORB 并联回路方块
MPS 存入堆栈
MRD 堆栈读取(指针不动)
MPP 读出堆栈
输出指令:
OUT 驱动线圈
SET 动作保持(ON)
RST 接点或寄存器清除
定时器,计数器:
TMR 16 位定时器
CNT 16 位计数器
DCNT 32 位计数器
主控指令:
MC 公共串联接点的连接
MCR 公共串联接点的解除
接点上升沿/下降沿输出指令:
LDP 上升沿检出动作开始
LDF 下降沿检出动作开始
ANDP 上升沿检出串联连接
ANDF 下降沿检出串联连接
ORP 上升沿检出并联连接
ORF 下降沿检出并联连接
脉冲输出指令:
PLS 上升沿检出
PLF 下降沿检出
传播优秀Word版文档,希望对您有帮助,可双击去除!
结束指令:
END 程序结束
其它指令:
NOP 无动作
INV 运算结果反相
P 指针
I 中断插入指针
步进梯形指令:
STL 程序跳至副母线
RET 程序返回主母线
应用指令:
程序流程控制:
00CJ 条件转移
01CALL 呼叫子程序
02SRET 子程序结束
03IRET 中断插入返回
04EI 中断插入允许
05DI 中断插入禁止
06FEND 主程序结束
07WDT 逾时监视定时器
08FOR 循环范围开始
09NEXT 循环范围结束
传送比较:
10CMP 比较设定输出
11ZCP 区间比较
12MOV 数据传送
13SMOV 移位传送
14CML 反转传送
15BMOV 全部传送
16FMOV 多点传送
17XCH 数据交换
18BCD BIN →BCD 变换
19BIN BCD →BIN 变换
四则逻辑运算:
传播优秀Word版文档,希望对您有帮助,可双击去除!
20ADD BIN 加法
21 SUB BIN 减法
22MUL BIN 乘法
23DIV BIN 除法
24INC BIN 加一
25DEC BIN 减一
26WAND/DAND 逻辑与 (AND) 运算
27WOR/DOR 逻辑或(OR) 运算
28WXOR/DXOR 逻辑异或(XOR) 运算
29NEG 取负数(取2 的补码)
循环移位与移位:
30ROR 右循环
31ROL 左循环
32RCR 附进位标志右循环
33RCL 附进位标志左循环
34SFTR 位右移
35SFTL 位左移
36WSFR 字右移
37WSFL 字左移
38SFWR 位移写入
39SFRD 位移读出
数据处理:
40ZRST 批次复位
41DECO 译码
42ENCO 编码
43SUM On 位数量
44BON On 位判定
45MEAN 平均值
46ANS 信号报警器置位
47ANR 信号报警器复位
48SQR BIN 开平方
49FLT BIN 整数→二进制浮点数变换
高速处理:
50REF I/O 状态即时刷新
51REFF 输入滤波器时间调整
52MTR 矩阵分时输入
53DHSCS 比较置位(高速计数器)
传播优秀Word版文档,希望对您有帮助,可双击去除!
54DHSCR 比较复位(高速计数器)
55DHSZ 区间比较(高速计数器)
56SPD 脉冲频率检测
57PLSY 脉冲输出
58PWM 脉冲波宽调制
59PLSR 附加减速脉冲输出
便利指令:
60IST 手动/自动控制
61SER 数据检索
62ABSD 绝对方式凸轮控制
63 INCD 相对方式凸轮控制
64TTMR 示教式定时器
65STMR 特殊定时器
66ALT On/Off 交替
67RAMP 斜坡信号
68 DTM 数据转换与搬移
69SORT 数据整理排序
外部设定显示:
70TKY 十键键盘输入
71 HKY 十六键键盘输入
72DSW 数字开关
73SEGD 七段显示器译码
74SEGL 七段显示器分时显示
75ARWS 方向开关控制
76ASC ASCII 码变换
77PR ASCII 码打印
外部SER设备:
78FROM 扩展模块CR数据读出
79TO 扩展模块CR数据写入
80RS 串行数据传送
81PRUN 8 进制位传送
82ASCI HEX 转为ASCII
83HEX ASCII 转为HEX
84CCD 校验码
85VRRD 电位器值读出
86VRSC 电位器刻度读出
87ABS 绝对值运算
传播优秀Word版文档,希望对您有帮助,可双击去除!88PID PID 运算
台达变频器通讯:
100MODRD MODBUS 数据读取
101MODWR MODBUS 数据写入
102FWD 变频器正转指令
103REV 变频器反转指令
104STOP 变频器停止指令
105RDST 变频器状态读取
106 RSTEF 变频器异常复位
107LRC LRC 校验码计算
108CRC CRC 校验码计算
150 MODRW MODBUS 資料讀出/?入
206 ASDRW 台達伺服器通?
浮点运算:
110DECMP 二进制浮点数比较
112DMOVR 浮点数值数据移动
111DEZCP 二进制浮点数区间比较
116 DRAD 角度→弧度
117DDEG 弧度→角度
118DEBCD 二进制浮点数→十进制浮点数
119DEBIN 十进制浮点数→二进制浮点数
120DEADD 二进制浮点数加法
121DESUB 二进制浮点数法
122DEMUL 二进制浮点数乘法
123DEDIV 二进制浮点数除法
124DEXP 二进制浮点数取指数
125DLN 二进制浮点数取自然对数
126DLOG 二进制浮点数取对数
127DESQR 二进制浮点数平方
128DPOW 浮点数乘方
129INT 二进制浮点数→BIN 整数变换
130DSIN 二进制浮点数SIN 运算
131DCOS 二进制浮点数COS 运算
132DTAN 二进制浮点数TAN 运算
133DASIN 二进制浮点数ASIN 运算
134DACOS 二进制浮点数ACOS 运算
135DATAN 二进制浮点数ATAN 运算
传播优秀Word版文档,希望对您有帮助,可双击去除!
136DSINH 二进制浮点数SINH 运算
137DCOSH 二进制浮点数COSH 运算
138DTANH 二进制浮点数TANH 运算
172DADDR 浮点数值加法
173DSUBR 浮点数值减法
174DMULR 浮点数值乘法
175DDIVR 浮点数值除法
数据处理 II :
143DELAY 延迟指令
144 GPWM 一般用脉冲波宽调变
145 FTC 模糊化温度控制
147 SWAP 上/下字节交换
148MEMR 文件寄存器读出
149MEMW 文件寄存器写入
151PWD 输入脉宽检测
152RTMU I 中断子程序执行时间测量开始
153RTMD I 中断子程序执行时间测量结束
154RAND 随机数值产生
109SWRD 数字开关读取
196 HST 高速定时器
176 MMOV 16 32 位数值转换
177 GPS (GPS) 接收通讯指令
178 DSPA 太阳能板位置指令
179WSUM求和
202SCAL比例值运算
203SCLP参数型比例值运算
205CMPT表格比较指令
207CSFO撷取速度与追随输出指令
定位控制:
155DABSR ABS 现在值读出
156ZRN 原点回归
157PLSV 附旋转方向脉冲输出
158 DRVI 相对定位
159DRVA 绝对定位
191DPPMR 双轴相对点运动
192DPPMA 双轴绝对点运动
193DCIMR 双轴相对圆弧插补
194DCIMA 双轴绝对圆弧插补。