电机驱动及控制模块
l9110s电机驱动模块工作原理
l9110s电机驱动模块工作原理
L9110S电机驱动模块的工作原理基于集成电路,其设计主要用于控制和驱
动电机。
通过控制输入信号的高低电平,可以控制芯片内部的开关管的导通与截止,进而控制电机的正转、反转和停止。
L9110S具有两个输出端,可以直接驱动电机的正反向运动。
它具有较大的
电流驱动能力,每通道能通过800mA的持续电流,峰值电流能力可达。
同时,它具有较低的输出饱和压降,内置的钳位二极管能释放感性负载的反向冲击电流,使其在驱动继电器、直流电机、步进电机或开关功率管等场合使用时,安全可靠。
以上信息仅供参考,如需了解更多信息,建议查阅相关文献或咨询专业人士。
stm32电机驱动模块原理
stm32电机驱动模块原理
stm32电机驱动模块原理
引言
•介绍stm32电机驱动模块的背景和意义
STM32电机驱动模块概述
•简要描述stm32电机驱动模块的功能
STM32单片机
•介绍STM32单片机的基本特点和应用场景
电机驱动方式
•列举电机驱动的常见方式,如直流电机驱动、步进电机驱动等stm32电机驱动模块的原理
•介绍stm32电机驱动模块的工作原理及其优势
•解释STM32单片机如何进行电机控制
–输入电机参数和控制指令
–简述编码器的使用及其对电机控制的重要性
–通过PWM信号控制电机速度和方向
stm32电机驱动模块的架构
•分析stm32电机驱动模块的主要组成部分
–MCU单元:负责接收和处理来自主控的指令
–电机驱动芯片:负责将MCU的PWM信号转化为合适的电流输出到电机
–电源模块:提供适量的电流和电压以供电机正常工作
–通讯接口:与外部主控设备进行数据交互
stm32电机驱动模块的使用
•介绍如何使用stm32电机驱动模块
•给出示例代码以帮助读者快速上手
stm32电机驱动模块的应用领域
•讨论stm32电机驱动模块在各个领域中的应用案例
总结
•对stm32电机驱动模块进行总结
•强调stm32电机驱动模块的重要性和前景
通过以上标题和副标题的方式,可以清晰地展示出对stm32电机驱动模块原理的解释和介绍。
这样的文章结构将有助于读者更好地理解和掌握相关内容。
电机控制器

电机控制器电机控制器是一种用于控制电机的设备,它可以根据用户的需求,控制电机的速度、转向和启停等动作。
在工业控制、交通运输、家居电器等领域广泛应用。
一、电机控制器的基本原理电机控制器的基本原理是通过控制电压、电流和频率等参数,来实现对电机的控制。
电机控制器通常由电源模块、控制模块和驱动模块三部分组成。
1. 电源模块:电源模块为电机控制器提供所需的电力,通常包括直流电源和交流电源两种类型。
直流电源一般用于低功率电机的控制,交流电源则适用于高功率电机的控制。
2. 控制模块:控制模块是电机控制器的核心部分,它负责接收用户的操作指令,并将其转化为控制信号,以控制电机的运行状态。
控制模块通常由微处理器、传感器、编码器等组成,它能够实时监测电机的转速、转向和负载情况,并根据需求调整控制信号。
3. 驱动模块:驱动模块将控制信号转化为电机所需的电压、电流和频率等参数,以实现对电机的控制。
驱动模块通常由功率放大器、开关电路等组成,它能够提供足够的功率给电机,使其能够正常运转。
二、电机控制器的应用领域1. 工业控制:在工业生产中,电机控制器被广泛应用于各类生产设备和机械装置的控制系统中。
通过电机控制器,可以实现对生产设备的精确控制,提高生产效率和产品质量。
2. 交通运输:电机控制器在汽车、火车、飞机等交通工具中的应用十分常见。
它能够控制车辆的加速、减速和转向等动作,提高行驶的安全性和舒适性。
3. 家居电器:家用电器中的电机控制器主要用于控制洗衣机、冰箱、空调等电器设备的运行。
通过电机控制器的精确控制,可以调节设备的工作模式和运行参数,提升用户体验。
4. 智能机器人:电机控制器在智能机器人领域的应用也越来越广泛。
通过电机控制器,机器人可以实现精确的运动控制,完成各类任务,如搬运、装配、清洁等。
三、电机控制器的发展趋势随着科技的进步和物联网技术的快速发展,电机控制器也在不断创新和改进中。
未来的电机控制器将具有以下特点:1. 高效节能:电机控制器将通过优化控制算法和降低能量损耗,实现对电机的高效控制和节能运行。
新能源汽车驱动电机与控制技术 模块二 电机学基础知识

4000-6000
1.0 1.0 良 差 一般 4000-6000 最好 差 差 大、重 高 低
4000-10000
1.0-1.5 2.5 良 好 好 4000-15000 好 一般 一般 小、轻 高 高
9000-15000
0.8-1.2 3.5 优 一般 好 9000-15000 好 好 好 一般、一般 低 高
<15000
0.6-1.0 4.5 优 一般 好 〉15000 好 好 好 小、轻 最低 一般
二、新能源汽车常用电机驱动系统 (七)各种电机的比较 各种电机在我国的发展现状:
(1)交流异步电机驱动系统我国已建立了具有自主知识产权异步电机驱动 系统的开发平台,形成了小批量生产的开发、制造、试验及服务体系;产品 性能基本满足整车需求,大功率异步电机系统已广泛应用于各类电动客车; 通过示范运行和小规模市场化应用,产品可靠性得到了初步验证。
二、新能源汽车常用电机驱动系统 (8)瞬时功率大,过载能力强,要保证汽车具有4~5倍的过载能力,以满足短 时内加速行驶与最大爬坡的要求。 (9)环境适应性好,要适应汽车本身行驶的不同区域环境,即使在较恶劣的环境 中也能够正常工作,具有良好的耐高温、耐潮湿性能。 (10)制动再生效率高,在汽车减速时,能够实现反馈制动,将能量回收并反馈 回电池,使得电动汽车具有最佳能量利用率。 (11)其他:结构简单,价格低廉,适合大批量生产,运行时噪声低,使用维修 方便。 (12)与一般工业用电机不同,用于汽车的驱动电机应具有调速范围宽、起动转 矩大、后备功率高、效率高的特性,此外,还要求可靠性高、耐高温及耐潮、结 构简单、成本低、维护简单、适合大规模生产等。未来我国电动汽车用驱动电机 系统将朝着永磁化、数字化和集成化方向发展。
电机驱动模块的原理
电机驱动模块的原理
电机驱动模块的原理是将来自控制器的电信号转换为电流或电压信号,驱动电机转动。
具体原理如下:
1. 电信号转换:控制器发出的电信号通常是低功率的数字信号,需要经过电信号转换模块将其转换为适合电机驱动的电流或电压信号。
常用的转换方式包括模拟信号转换(如DAC转换)和数字信号转换(如PWM信号转换)。
2. 电流控制:驱动电机通常需要提供稳定的电流信号作为动力源。
电流控制模块会根据电信号转换得到的电流信号,采用电流控制技术(如H桥电路、功率放大器等)将电流信号输出到电机,驱动电机转动。
3. 电压控制:有些电机驱动模块也可以提供电压输出,作为电机的驱动信号。
电压控制模块会将电信号转换得到的电压信号直接输出到电机,驱动电机转动。
4. 保护功能:电机驱动模块通常还会具备一些保护功能,用于保护电机和驱动模块的安全。
常见的保护功能包括过载保护、过热保护、过压保护和短路保护等。
综上所述,电机驱动模块的原理是将来自控制器的电信号转换为电流或电压信号,并通过电流或电压控制技术将信号输出到电机,驱动电机转动。
同时,还具备一些保护功能,以保证电机和驱动模块的安全运行。
基于直流电机控制与驱动模块的研究与应用
Re e r h & Ap l a i n Ba e sa c p i to s d c
o DC o o nt o n i e M o l s n M t r Co r la d Dr v du e
L IXue o g —d n ,ZHANG ng u , Pi —h a DENG i ui Zh —h
摘要 : 直流电机控制与驱动模块是基 于单片机技术和 PM w 驱动所实现的直流调速控制技术, 用 AR 运 V 编 程技术、 串口通信技术、 电子制版技术, 通过小型电子模块 的表现方式, 将小型直流电机 的驱动与控制功
能集成在一块小型的电路板上, 为各种小功率的直流电机和直流减速电机提J控制与驱动。 { 共
I H【 国 集成 电 路 … l 】
—_
na nt at r t C hi I egr ed C icui
田应用
李雪 东, 张平华 , 邓知辉
( 湖南信 息职业技 术 学院 湖 南 长 沙 4 0 0 ) 1 2 0
1 概 述
直 流 电机 控 制 与驱 动模 块 采 用 的是 脉 宽 调 制 ( WM) 流调 速 技 术 , 有 调 速 范 围宽 、 P 直 具 响应 速度
2 控 制 部 分 与通 讯 协 议
选用 一款 典型 驱动 芯片 L 9 N,根 据直 流 电机 28 控制原 理选择需 要用 到的单片机 型号和 P WM 芯
( ) 1 电机设 定 :o ad cmm n
I l【 II If lI3 ID iD ID ) 7 】 6 ) 5 ) 4 ) 2 1 O
通讯 协议 : 采用 9 0bs8 数 据位 、 位 停止 6 0p , 位 1
吸尘器电机控制系统
吸尘器电机控制系统引言吸尘器是一种常见的家用电器,它的主要功能是收集和清洁室内的尘埃和污垢。
吸尘器的核心部件是电机,它通过产生强大的吸力将尘埃吸入吸尘器内部。
为了实现吸尘器的高效工作,需要一个可靠的电机控制系统来控制电机的运行。
本文将介绍吸尘器电机控制系统的设计原理和工作流程,以及常见的控制方法和技术。
设计原理吸尘器电机控制系统的设计原理是通过控制电机的电压和电流来实现电机的启动、运行和停止。
一般来说,吸尘器电机控制系统由电源模块、电机驱动模块和控制模块组成。
电源模块负责提供电机所需的电源,电机驱动模块负责将控制信号转换为电机驱动信号,控制模块负责接收用户的操作指令并发送控制信号给电机驱动模块。
工作流程1.用户通过按下吸尘器的启动按钮来启动吸尘器。
2.启动按钮的信号被控制模块接收,控制模块发送控制信号给电机驱动模块。
3.电机驱动模块根据控制信号控制电机的电压和电流,从而启动电机。
4.电机开始运行后,吸尘器开始产生吸力,吸入尘埃和污垢。
5.当用户松开吸尘器的启动按钮时,控制模块发送控制信号给电机驱动模块,电机驱动模块降低电机的电压和电流,从而停止电机的运行。
控制方法和技术吸尘器电机控制系统常用的控制方法和技术有以下几种:1. 开关控制开关控制是最简单和常见的控制方法,通过手动开关来控制电机的启动和停止。
用户通过按下启动按钮来启动电机,松开按钮则停止电机的运行。
这种控制方法实现简单,但缺乏灵活性和精确性。
2. 脉宽调制(PWM)控制脉宽调制是一种通过调节开关信号的占空比来控制电机的电压和电流的方法。
通过改变脉冲的高电平时间和低电平时间的比例,可以实现对电机电压的调节,从而控制电机的转速和吸力。
这种控制方法具有灵活性和精确性,适用于不同工作情况下的吸尘器控制。
3. 电流反馈控制电流反馈控制是一种通过监测电机的电流来实现对电机的控制的方法。
通过检测电机的电流变化,可以判断电机的负载情况,从而调整电机的电压和电流,以实现吸尘器的稳定运行和自动保护。
电机控制器的结构组成和工作原理
电机控制器是现代电气设备中的重要组成部分,其结构组成和工作原理对于电机的运行和性能起着关键作用。
本文将对电机控制器的结构组成和工作原理进行详细介绍,以便读者对该领域有更深入的了解。
一、电机控制器的结构组成电机控制器通常由以下几个主要部分组成:1. 电源模块:电机控制器的电源模块用于提供稳定的电力供应,通常包括电源输入、整流、滤波和功率放大等部分,用于将电网或电池提供的电能转化为适合控制电机的电能。
2. 信号采集模块:该模块用于采集电机的运行状态、外部信号和控制指令等信息,通常包括传感器接口、模拟/数字转换器、滤波器等部分,用于实时监测电机的运行情况并反馈给控制器。
3. 控制逻辑模块:控制逻辑模块是电机控制器的核心部分,用于处理信号采集模块采集到的信息,计算电机的控制策略并生成控制指令,通常包括微处理器、程序存储器、数据总线等部分,用于实现电机的精准控制。
4. 驱动模块:驱动模块用于接收控制逻辑模块生成的控制指令,驱动电机的运行,通常包括功率放大器、输出级驱动电路等部分,用于将控制逻辑模块生成的低功率电信号转化为适合电机的高功率电能。
5. 保护模块:保护模块用于监测电机的运行状态,当出现异常情况时及时采取保护措施,通常包括过流保护、过压保护、短路保护等部分,用于保障电机和电机控制器的安全运行。
二、电机控制器的工作原理电机控制器的工作原理主要包括信号采集、控制逻辑处理、驱动输出和保护反馈四个方面。
1. 信号采集:电机控制器通过信号采集模块实时监测电机的转速、电流、温度等运行状态,同时接收外部控制指令和参数设定,将采集到的信息传输给控制逻辑模块。
2. 控制逻辑处理:控制逻辑模块接收信号采集模块传来的信息,根据预设的控制算法和逻辑进行处理,计算出电机的控制策略和控制指令,然后将处理后的指令传输给驱动模块。
3. 驱动输出:驱动模块接收控制逻辑模块生成的控制指令,根据指令进行功率放大和输出级驱动操作,将高功率电能输出给电机,驱动电机的运行并保持其稳定运行。
电机驱动模块
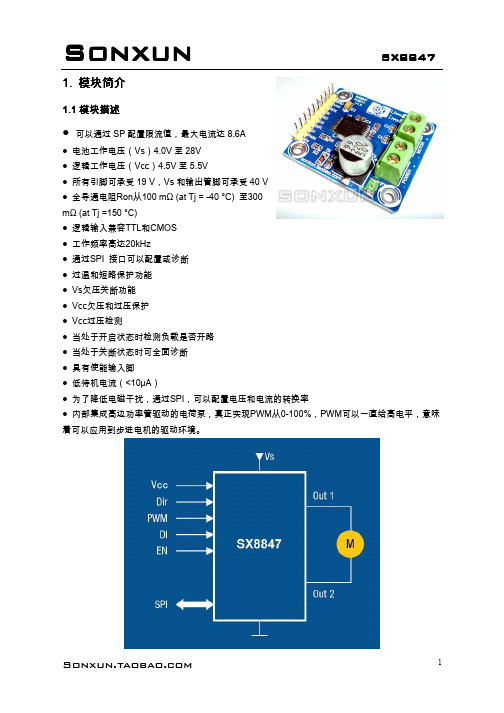
1. 模块简介模块简介模块描述描述1.1模块描述● 可以通过SP配置限流值,最大电流达8.6A● 电池工作电压(Vs)4.0V至28V● 逻辑工作电压(Vcc)4.5V至5.5V● 所有引脚可承受19 V,Vs和输出管脚可承受40 V● 全导通电阻Ron从100 mΩ (at Tj = -40 °C) 至300mΩ (at Tj =150 °C)● 逻辑输入兼容TTL和CMOS● 工作频率高达20kHz● 通过SPI 接口可以配置或诊断● 过温和短路保护功能● Vs欠压关断功能● Vcc欠压和过压保护● Vcc过压检测● 当处于开启状态时检测负载是否开路● 当处于关断状态时可全面诊断● 具有使能输入脚● 低待机电流(<10μA)● 为了降低电磁干扰,通过SPI,可以配置电压和电流的转换率● 内部集成高边功率管驱动的电荷泵,真正实现PWM从0-100%,PWM可以一直给高电平,意味着可以应用到步进电机的驱动环境。
1.2 模块模块说明说明说明● SX8847是一个SPI控制的H桥,专为应用在高可靠性和极端环境条件下设计的直流和步进电机控制芯片。
● 每个通道上的详细故障诊断是通过SPI提供的,包括电机短路,对地短路,过载,过温。
● 开启状态下,可以检测负载开路,应用范围广泛。
限流值可以通过SPI配置,从2.5A到8.6A。
在所有温度范围内保证±10%的精度。
● 当温度超过165℃,限流值线性降低,并通过SPI发出过温警告。
1.31.3模块接口模块接口模块接口类别引脚 名称 说明1 GND 逻辑电源地2 VCC 逻辑电源正(4.5-5.5V)3 SCK SPI时钟 4SI 串行数据输入 5 SO 串行数据输出 6 CS 片选 7 DIR 方向输入 8 DI 关断 9 PWM PWM输入 逻辑接口10 EN 使能 + 功率电源正 POWER- 功率电源地 + 电机+ 功率接口MOTOR-电机-1.41.4模块结构模块结构模块结构1.1.55模块尺寸模块尺寸43mmX38mmX12mm2. 使用说明使用说明2.1 电源电压范围电源电压范围 SX8847的电源电压范围是从欠压值到28V。
伺服电机驱动器原理图
伺服电机驱动器原理图伺服电机驱动器是一种控制装置,用于控制伺服电机的运动。
它通过接收控制信号,控制电机的速度、位置和转矩,从而实现精准的运动控制。
在工业自动化、机械加工、医疗设备等领域,伺服电机驱动器被广泛应用。
伺服电机驱动器的原理图主要包括电源模块、控制模块、驱动模块和保护模块。
首先,电源模块提供电压和电流给驱动器,保证其正常工作。
控制模块接收输入信号,经过信号处理后输出给驱动模块,控制电机的运动。
驱动模块根据控制信号驱动电机转动,并通过反馈信号调整控制参数,以实现精准的位置控制。
保护模块则用于监测电流、温度等参数,一旦出现异常情况,及时停止电机工作,保护设备和人员安全。
在伺服电机驱动器的原理图中,各个模块之间通过信号线、电源线等互相连接,形成一个完整的控制系统。
控制信号经过控制模块处理后,输出给驱动模块,驱动电机运动。
同时,反馈信号也通过信号线传回控制模块,用于调整控制参数,实现闭环控制。
伺服电机驱动器的工作原理可以简单描述为,控制模块接收输入信号,经过处理后输出给驱动模块,驱动电机转动。
同时,驱动模块通过反馈信号调整控制参数,实现精准的位置控制。
在整个过程中,保护模块不断监测电流、温度等参数,一旦出现异常情况,及时停止电机工作。
伺服电机驱动器的原理图设计需要考虑到各个模块之间的连接和信号传输,保证信号的稳定和可靠。
同时,对于控制模块的信号处理和驱动模块的输出功率也需要进行精确的设计和调试,以实现对电机的精准控制。
另外,保护模块的设计也至关重要,它可以保证设备和人员的安全,避免意外事故的发生。
总的来说,伺服电机驱动器的原理图设计涉及到电气、控制、信号处理等多个领域的知识,需要工程师们综合运用这些知识,设计出高性能、稳定可靠的控制系统。
只有这样,才能满足不同领域对于精准运动控制的需求,推动工业自动化、机械加工等领域的发展。
三相无刷电机驱动器原理
三相无刷电机驱动器原理
三相无刷电机驱动器是一种常见的电机控制器,它可以控制步进电机或直流电机的速度和方向。
无刷电机驱动器主要由三个模块组成:功率模块、控制模块和传感器模块。
功率模块:功率模块是无刷电机驱动器的核心部分,它主要由电源、MOS管驱动电路和三相电机组成。
无刷电机驱动器使用MOS管控制三相电机的通断,从而实现电机的速度和方向的控制。
控制模块:控制模块主要用于控制电机的转速和方向,它主要包括信号处理器、比较器、逆变器等部分。
信号处理器将输入的指令转换为电机控制信号,比较器将电机输出的实际速度与设定速度进行比较,逆变器改变输入信号的频率和幅度,从而实现电机的速度调节。
传感器模块:传感器模块主要用于检测电机的转速和位置,它主要由霍尔元件和磁铁组成。
霍尔元件可以检测电机的磁场变化,从而确定电机转速和位置。
磁铁则用于产生磁场,供霍尔元件检测。
无刷电机驱动器的控制原理是:首先,控制模块将输入的指令转换为电机控制信号,然后传感器模块检测电机的转速和位置,将结果反馈给控制模块。
接着,控制模块将反馈信息与设定值进行比较,调整逆
变器的输出信号的频率和幅度,改变MOS管的通断状态,从而控制电机的速度和方向。
无刷电机驱动器具有响应速度快、控制精度高、效率高等优点,被广泛应用于工业自动化、家用电器等领域。
未来,随着新材料和技术的发展,无刷电机驱动器的性能和应用范围将得到进一步提升。
简述电动汽车整车控制器的组成模块
简述电动汽车整车控制器的组成模块
电动汽车整车控制器主要由以下几个模块组成:
1. 电机驱动模块:负责控制电动汽车的电机,包括启动、停止、加速、制动等操作。
通过控制电机的转速、转向和扭矩输出,实现汽车的前进、倒车和转弯等功能。
2. 电池管理系统:用于监控和管理电动汽车的电池组。
包括电池的充放电控制、温度管理、电量监测、保护等功能,以提高电池的寿命和安全性。
3. 车辆控制单元(VCU):作为电动汽车整车控制的中枢,负责收集和处理车辆各个部件的数据,并根据车辆状态和用户操作提供相应的控制指令。
VCU还负责监控车辆系统的运行状况,并对异常情况进行处理和报警。
4. 故障诊断系统:用于检测和诊断电动汽车整车系统的故障。
通过采集和分析车辆各个部件的数据,判断是否存在故障,并提供相应的故障码和故障信息,以便修复车辆故障。
5. 通信模块:用于与其他车辆系统进行通信,包括车载终端、车载网络和远程监控平台等。
通过与外部系统的通信,实现车辆的远程控制、定位、数据传输等功能。
6. 辅助系统控制模块:包括空调系统、制动系统、转向系统等辅助系统的控制模块。
通过控制这些辅助系统的工作状态,实现对整车性能的调节和优化。
总之,电动汽车整车控制器是一个复杂的系统,由多个模块组成,每个模块都扮演着重要的角色,协同工作,以实现电动汽车的安全、高效和智能控制。
电机控制模块定制方案

电机控制模块定制方案引言电机控制模块是现代电子设备中广泛应用的重要组成部分。
它负责电机的驱动和控制,对于各种类型的电机(如直流电机、步进电机等)都起着关键作用。
为了满足不同应用场景的需求,定制化的电机控制模块方案逐渐受到市场的重视。
本文将介绍一种电机控制模块的定制方案,以满足客户的个性化需求。
设计目标1. 灵活性定制的电机控制模块方案应具有良好的灵活性,以适应不同类型电机的驱动和控制。
客户可以根据实际需求选择不同的控制算法、接口和参数配置,以实现最佳的电机性能。
2. 高性能电机控制模块应具备高性能的驱动能力和精确的控制能力。
它应能够通过高效的电流控制和闭环反馈机制,实现电机的平滑运行和精确定位。
3. 可靠性可靠性是定制电机控制模块的基本要求。
通过优质的材料和可靠的设计,模块应能够长时间稳定工作,避免故障和损坏。
方案设计1. 硬件设计1.1 控制芯片选择控制芯片是电机控制模块的核心组件,它负责实时控制电机的运行状态。
根据设计目标,我们选择了一款高性能的控制芯片,具备强大的计算能力和丰富的接口资源。
1.2 电源电路设计电源电路是电机控制模块不可或缺的一部分。
我们选择了高效稳定的开关电源芯片,确保模块在不同输入电压范围内都能正常工作。
1.3 驱动电路设计驱动电路是电机控制模块的关键组成部分。
我们根据客户的需求选择了适合不同类型电机的驱动芯片,并根据电机的特性进行了精确匹配和配置。
1.4 接口设计为了提高模块的兼容性,我们设计了丰富的接口,包括数字接口和模拟接口。
这些接口可以与其他外部设备进行数据交互,并且支持常见的通信协议。
2. 软件设计2.1 控制算法定制化的电机控制模块方案需要根据实际应用场景选择合适的控制算法。
我们提供了多种算法选项,如PID控制算法、模糊控制算法等。
客户可以根据自己的需求选择最合适的算法。
2.2 参数配置为了满足不同电机的需求,我们设计了灵活的参数配置模块。
客户可以通过配置参数来调整电机的速度、加速度、位置等属性,以实现最佳的运动性能。
简述电机控制器的组成
简述电机控制器的组成
电机控制器是一种用于控制电机旋转速度、转矩和方向的电子控制器,通常由以下几个部分组成:
1. 输入模块:输入模块用于接收传感器和执行器输入信号,例如电压、电流、传感器数据、开关信号等。
这些信号将用于控制电机控制器的算法和逻辑。
2. 微控制器:微控制器是电机控制器的核心,通常采用嵌入式系统设计,具有高性能、低功耗、可靠性高等特点。
微控制器通常由控制器芯片、存储器、输入输出接口、时钟等部分组成。
3. 电机驱动模块:电机驱动模块用于控制电机的旋转速度、转矩和方向。
通常由电机控制芯片、驱动器电路、控制逻辑等部分组成。
4. 输出模块:输出模块用于将电机控制信号输出给电机,通常由信号接口、电源接口等组成。
输出模块的接口类型和规格通常根据电机类型和控制器型号来确定。
电机控制器的组成还包括一些外围元件,例如滤波器、时钟、校验和等,这些元件有助于确保电机控制器的性能和质量。
电机控制器的主要功能是将输入信号转换为电机所需的输出信号,以控制电机的旋转速度、转矩和方向。
随着电机控制技术和电机控制器的不断提高,电机控制器的功能和性能也在不断提升。
电机控制器的应用领域非常广泛,例如智能家居、工业自动化、电动汽车等。
电机控制器emc原理

电机控制器(EMC)的基本原理1. 电机控制器(EMC)的概述电机控制器(Electric Motor Controller,EMC)是一种用于控制电动机的装置,它通过对电机的电流、电压和频率进行控制,实现对电机的启动、停止、速度调节和方向控制等功能。
EMC通常由电源模块、控制模块和驱动模块组成,其中控制模块负责接收用户输入的控制信号,并根据信号进行处理后输出给驱动模块,驱动模块则根据控制信号驱动电机工作。
EMC的基本原理涉及到电机的控制技术、电路设计和信号处理等知识领域。
下面将详细介绍EMC的基本原理。
2. 电机控制的基本原理电机控制的基本原理是根据电机的特性和工作要求,通过合理控制电机的电流、电压和频率,实现对电机的启动、停止、速度调节和方向控制等功能。
2.1 电机的启动和停止控制电机的启动和停止控制是EMC最基本的功能之一。
在启动过程中,EMC会向电机施加逐渐增加的电流,使电机逐渐达到额定转速。
在停止过程中,EMC会逐渐减小电流,使电机逐渐停止转动。
启动和停止控制的关键是控制电机的电流。
在启动过程中,电机的起动电流会比稳定工作时的电流大很多。
EMC通过施加较大的起动电流,使电机能够克服惯性,达到启动转速。
在停止过程中,EMC逐渐减小电流,使电机逐渐停止转动。
2.2 电机的速度调节控制电机的速度调节控制是EMC的另一个重要功能。
通过调节电机的电流和电压,可以实现对电机转速的精确控制。
在速度调节控制中,EMC会根据用户输入的控制信号,计算出电机所需的电流和电压。
然后,EMC会根据计算结果输出相应的控制信号给驱动模块,驱动模块通过改变电机的电流和电压来调节电机的转速。
2.3 电机的方向控制电机的方向控制是EMC的另一个重要功能。
通过改变电机的相序,可以改变电机的旋转方向。
在方向控制中,EMC会根据用户输入的控制信号,判断电机所需的旋转方向。
然后,EMC会根据判断结果输出相应的控制信号给驱动模块,驱动模块通过改变电机的相序来改变电机的旋转方向。
用51单片机控制L298N电机驱动模块
⽤51单⽚机控制L298N电机驱动模块
参考视频:(听不懂,但是可以看的懂)
准备做⼀个智能⼩车,⽬前啥也不会,淘宝上买了⼀堆零件,组装了⼀个简易的⼩车,包括:单⽚机最⼩系统⼀个,L298N电机驱动模块⼀个,直流电机2个,红外循迹模块两个。
关于L298N,⾸先看下⾯的参考图
我使⽤的是⼀块9V的⼲电池进⾏供电,正极接12V供电这个位置,负极接GND。
5V供电这个接⼝此时不是输⼊,⽽是输出⼀个5V的电压,可以⽤来给单⽚机供电。
(当板载5v使能这个跳线帽是插下去的状态。
)
要想让电机动起来,
---⾸先电池接好,
---5V供电--》接单⽚机VCC,
---GND要和单⽚机的GND相连(重点)
---通道A使能这个跳线帽,插着,逻辑输⼊(共4个,上⾯两个控制A电机,下⾯两个控制B电机)IN1和IN2分别连线单⽚机的两个IO⼝,---输出A位置,接电机的两根线(没正反区别),
---然后写个简单程序,⼀个IO⼝=1,⼀个等于0,while(1);循环。
就能动起来了。
电机驱动模块原理
电机驱动模块原理
电机驱动模块是一种用于控制电机运转的电子模块。
它可以将电信号转换为机械运动,从而实现对电机的控制。
电机驱动模块的原理是基于电磁感应和电子控制技术的。
电机驱动模块通常由电源、控制电路和功率输出电路三部分组成。
电源提供电能,控制电路负责控制电机的运转,功率输出电路则将控制信号转换为电机的动力输出。
在电机驱动模块中,控制电路是关键部分。
它通过对电机的电流和电压进行控制,实现对电机的转速、转向和负载的控制。
控制电路通常由微控制器、驱动芯片、传感器和滤波电路等组成。
微控制器是控制电路的核心,它可以根据输入的控制信号,控制驱动芯片输出相应的电流和电压。
驱动芯片则负责将微控制器输出的信号转换为电机所需的电流和电压。
传感器可以检测电机的转速和位置,从而实现对电机的闭环控制。
滤波电路则可以消除电机输出的噪声和干扰信号,保证控制电路的稳定性和可靠性。
功率输出电路是电机驱动模块的另一个重要部分。
它负责将控制信号转换为电机的动力输出。
功率输出电路通常由功率晶体管、电感和电容等组成。
功率晶体管可以控制电流的大小和方向,从而实现对电机的转速和转向的控制。
电感和电容则可以平滑电流和电压的波形,保证电机的稳定运转。
电机驱动模块是一种基于电磁感应和电子控制技术的电子模块。
它可以将电信号转换为机械运动,实现对电机的控制。
电机驱动模块的原理是基于控制电路和功率输出电路的相互作用,通过对电机的电流和电压进行控制,实现对电机的转速、转向和负载的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机驱动及控制模块3.3电机驱动及控制模块331 电机特性—小车前进的动力是通过直流电机来驱动的,直流电机是最早出现的电动机, 也是最早能实现调速的电动机。
长期以来,直流电动机一直占据着调速控制的 统治地位。
它具有良图7主、从单片机小系统应用电路好的线性调速特性,简单的控制性能, 较高的效率,优异的动态特性。
系统 选用的大谷基础车的260马达作为驱动电机。
其额定电压为 3-12V ,额定功率 0.02KW 额定转速 3000r/min 。
近年来,直流电动机的结构和控制方式都发生了很大变化,随着计算机进入控制领域,以及新型的电力电子功率元件的不断出现,使采用全控制型的开关 功率元件进行脉冲调制(Pulse Width Modulation 简称PWM 控制方式已经成 为主流,这种控制方式容易在单片机控制中实现。
BEyrCAPCAP 2+ CAP + CiP I * EP ZCAP bHT-OVTl rr-xrr:T-m TDU rae.-[tfiE-C'UTL 化UT2H山习4 F21TF匸曲~IF P22 vcc P22m酯TKX1WXIPi -?TTCZ'JPJL Pl« YT 11 T m 電XTALiP14 nffo/pss F13 D1TLJP3J P12 JP34 P1JPLD PA 回■! P 討TCAO PM时ow P 禹PIO Vcc P]1 FOCUADQ P32 POL/ADL E>JJ !Plfl Pt3(AD3P]5P 】6 f :^AD5 P17P0*'AD6PB7/AD7RSTTmjpsiEX LVD^ fiZRST2AL&FI 5曲朗 卜⑷PJ 4wwuTflrP34ri 郴PITPM廻p 北 F35 FiZiiP]!F24F33 xrAi.3 P]3 j^TALLP.3LPintr空【时LEDT 级, 厂:1巧处4打"卜单怜机VCC鱼TZ?IJ■'ll. a,. . J1. P ■■・一 ■■ ■ ■b w 1 ? 3 *・!>rr ・.1 L I I I I r —PF p p LpPW M 技术的具体有点:调速范围宽,可以使电机安全地工作在每分钟几转到全速运转; 效率高,电源能源损耗小; 易于数字量控制;应用广泛,PW M 技术不仅可以用在电机调速,还可以在直流电压、 交流变频控制等领域有很大应用。
332电路设计本系统直流电机驱动及控制模块采用 NEC 公司电机控制ASSP 芯片MMC-1以 及双H 驱动桥IC L298N 芯片。
MMC-1为多通道两相四线式步进电机 /直流电机控制芯片,通过 UART 或 SPI 串行接口,为主控MCU 扩展专用电机控制功能,可同时控制三路步进电机 或直流电机。
主要功能特点(直流电机控制部分)如下:三通道步进电机或直流电机控制,电机类型可以自由配置 主控MCU 通过UART 或者SPI 串型接口控制 直流电机的正反转控制 直流电机的速度控制256档 过电流检测功能两通道、三通道同步功能睡眠模式 供电电压:Vdd=2.7V~5.5V 芯片的封装如图8所示(1) (2) (3) (4) (5) (6) (7)(8)cm 沖UHMNT| HUNT riHINT ClilsTAl RESFTNTUART.-^Fo ~~■o—愠时 REEg VAI.TXD 冲 | RNTiSl 3CK1OWLT12SEN29—0 -JH3SEN3 23g4 T ■一-O V dJ 5 25 —CHI STB 1 (6—0.'E^yTAl■斗f 0 冲切Bl9LH I STA2fCH J DCPWM 9岂r-K)BHE 打匚UIIXTITR 1021—K)'bi :S I'A2 (.■HZ.H/PWi -J2Q[THSirrBZCHSEKBlR19门19 —*011r—*o i7H?STAL1516-K) 厂 HWIMCMo-3图8 MMC-1芯片外部引脚封装图通过单片机的TXD和RXD口分别与芯片的13(TXD/S0)管脚和14(RXD/SI)管脚进行数据通信,实现单片机对芯片的各个功能模块的设置。
8(USRT/SPI)管脚为串行通讯模式选择,高电平为UART莫式,低电平为SPI模式,本系统中使用UART模式,故使8管脚直接接电源正极。
MMC-1芯片的1 管脚(CH1SE N 30 管脚(CH2SEJN 和29 管脚(CH3SEJN 分别为3个电机通道的过流检测端,若不使用可通过10K电阻接地。
6(RESET为MMC-1复位管脚,低电平有效。
故本系统中把该端接高电平(电源正极串接一个10K电阻后接入该端)。
电源端Vdd=2.7V-5.5V。
9(SLEEP)管脚若输入逻辑低电平,MMC-进入睡眠模式,本系统中无需使用该功能,把该管脚直接接电源正极。
每一路直流电机需要CHnDCPWM CHnDCDIF两个弓|脚(n=1~3), CHnDCP用于PWM输出,CHnDCDI用于指定电机的转向,外接一个全桥驱动芯片就可以控制直流电机工作。
输出频率固定16KHz通过调节占空比控制电机转速。
本系统使用通道1和通道2分别控制2个直流电机。
如图9所示。
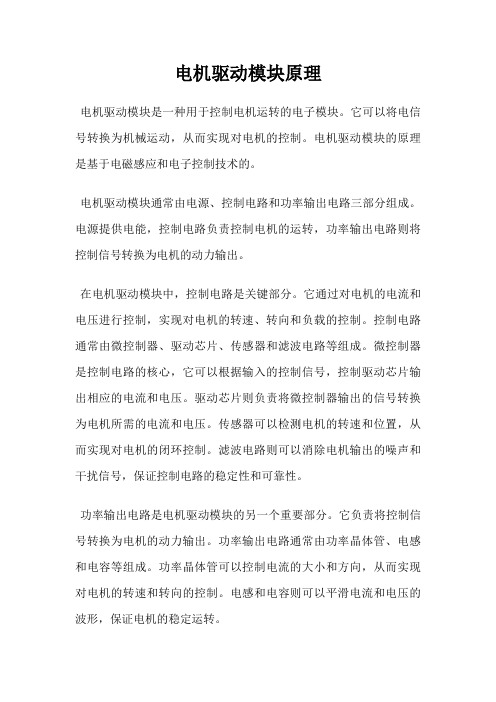
★描善陋H桥矩动K> L29B*Ril0K,C i0 47u(图9 MMC-1控制直流电机应用电路CUFi<?FNT SE^ihiG 6CdTPUT+CXJTPin 3IhPUT 4ENAE_= EINPUTSLOGIC SUF PL v VOLTAGE V fr.GNDINPUT 1ENABLE AIhPUT 1SUPPLY Si'DLTAGEVsOUTPUT 2CUTPUT 1CUR^F'JT SFNS^NGA WMTXD 皿CHIDCPWK1ir T ART SH CHtDCDIR RtStTSLEEPR1O/ST mTHR novsoRECCVss1图10 L298芯片管脚封装图双H桥驱动芯片L298内包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即2个H-Bridge的高电压大电流双全桥式驱动器,接收标准的TTL逻辑准位信号,可以驱动46V、2A以下的直流电机,且可以直接透过电源调节输出电压。
L298的芯片的管脚封装如图10所示。
1脚和15脚可单独引出连接电流采样电阻器,形成电流传感器,在本系统中未用到,因此直接接地,防止干扰。
L298可以驱动两个电极,OUT1 OUT2和OUT3 OUT4之间分别接2个电动机。
5、7、10、12脚接输入控制电平,控制电机的正反转。
ENA ENB接控制使能端,控制电机的停转,电机的转速控制也是通过L298 的这两个引脚(即ENA和ENB来实现的。
当ENA(ENB为逻辑1,电机可以运转,当ENA(ENB为逻辑0,电机停止运转。
当ENA(ENB引脚输入的是PWM&号,由于PWM信号有一定的频率,因此电机的启停状态都是在瞬间完成的。
但是由于电机的物理特性及电机转动的惯性的原因。
电机不可能在瞬间完成启动与停止。
因此,之歌时候可以等效的把加到电机两端的点啊等于VDD除以这个PWM波形的占空比。
占空比越大,电机运转地越快,占空比越小,电机运转地越慢,这样,我们只要调节输入到ENA(ENB的PWM波形的占空比,就可以轻松地条件电机的转速。
因此,结合MMC-1和L298,电机驱动及控制模块的电路如图7所示。
其中八个续流二极管防止电机线圈在突然断电时产生的感应电动势对L298的损害。
本系统是通过控制电机的转动时间来控制其转动速度,因此直接将ENA和ENB端接高电平,以全速运转。
电机驱动及控制模块如图11所示。
R2r~i 10KR1I1OK310口 ―CK1SEHCH25EN CH3INTOHB SEN£ JOINT 伽 CK1INT VddCK1STA1EESETWCWVpiCH1DCPWM 蛊应护CH1DCDIR RE 匏 CH2DCPWMVs?CH2DCDIRVddTXTFXI>/SISCKHEC I..OC-1<3£ 23 J1TT1 22 ____ TFT2 21 JHT3 30 HSTT419泗泗 AUT4 0UT5 EU EMAELEBDB LOGIC V (J NL> 叩 ENAFLE AINI SUPPLY V OUTi CUT ISEJT^ET Lm ccvcc8a JQT4OQ7严JIN4-O(J71: 14色二12 nm TT jo更JIN4OCT7"DMOO 了IWOOT] IN4007K" IN400i7| 1DBHT4007图11电机驱动及控制模块。