自适应滤波器设计及Matlab实现
自适应滤波器原理及matlab实现

自适应滤波器原理及matlab实现一、自适应滤波器概述自适应滤波器是一种特殊的滤波器,它能够根据信号的变化自动调整自身的特性,以更好地处理信号。
自适应滤波器在许多领域都有广泛的应用,例如通信、信号处理、语音识别等。
二、自适应滤波器原理自适应滤波器的原理基于最小均方误差(MMSE)准则。
它通过不断调整自身的系数,使得输出信号的误差最小,从而更好地匹配输入信号。
自适应滤波器的性能取决于其系数和输入信号的特点,因此需要根据不同的应用场景选择合适的滤波器。
三、MATLAB实现以下是一个简单的自适应滤波器的MATLAB实现示例:```matlab%定义系统参数n=100;%信号长度alpha=0.01;%学习率w=randn(1,n);%滤波器系数x=randn(n+1,1);%输入信号y=zeros(n+1,1);%输出信号e=zeros(n+1,1);%误差信号%自适应滤波器算法fori=1:ny(i)=w*x(i+1)+e(i);%输出信号e(i)=x(i+1)-y(i);%误差信号w=w+alpha*(x(i+1).^2-y(i).^2)*w-alpha*x(i+1)*e(i);%更新滤波器系数end%绘制滤波器系数随时间变化曲线plot(real(w),'b');holdon;plot([min(x),max(x)],[min(y)-3*std(y),max(y)+3*std(y)],'r');holdoff;xlabel('Time');ylabel( 'FilterCoefficient');legend('FilterCoefficient','SignalError' );gridon;```这段代码实现了一个简单的自适应滤波器,它根据输入信号不断调整自身的系数,以达到更好的匹配效果。
在代码中,我们使用了MATLAB的内置函数和矩阵运算来实现自适应滤波器的算法。
自适应滤波器的设计与实现

自适应滤波器的设计与实现1. 系统建模与参数估计:首先需要对待处理的信号和滤波器进行建模,可以使用线性波段信号模型或者非线性模型。
然后通过参数估计算法,如最小均方差(least mean squares,LMS)算法或最小均方(recursive least squares,RLS)算法,估计滤波器的参数。
2.误差计算与权重调整:根据实际输出和期望输出的差异,计算滤波器的误差。
在LMS算法中,通过误差梯度下降的方法,对滤波器的权重进行调整,使误差最小化。
在RLS算法中,通过计算误差协方差矩阵的逆矩阵,更新滤波器的权重。
3.收敛判据:为了使自适应滤波器能够收敛到期望的滤波效果,需要设置适当的收敛判据。
常用的收敛判据包括均方误差的变化率、权重变化率等。
当收敛判据满足一定条件时,认为滤波器已经收敛,可以停止调整权重。
4.实时更新:自适应滤波器通常需要在实时系统中应用,因此需要实现数据流的处理和滤波参数的更新。
可以使用中断或循环运行的方式,根据实时输入信号,计算滤波输出,并更新滤波器的参数。
在自适应滤波器实现的过程中,还需要考虑一些问题,例如滤波器的稳定性、收敛速度、选择合适的算法和参数等。
稳定性是指滤波器的输出是否会发散或发生振荡,可以通过控制步长和增加限制条件等方式来保证滤波器的稳定性。
收敛速度可以通过选择合适的学习因子或更新参数等方式来提高。
总结起来,自适应滤波器的设计与实现需要进行系统建模、参数估计、误差计算与权重调整、收敛判据的设置以及实时更新等步骤。
同时需要考虑滤波器的稳定性和收敛速度等问题。
随着数字信号处理和控制技术的不断发展,自适应滤波器在实际应用中发挥着重要的作用,具有广阔的应用前景。
LMS算法MatLab实现

LMS算法MatLab实现LMS算法MatLab实现LMS⾃适应滤波器是使滤波器的输出信号与期望响应之间的误差的均⽅值为最⼩,因此称为最⼩均⽅(LMS)⾃适应滤波器。
其原理及推导见function [yn,W,en]=LMS(xn,dn,M,mu,itr)% LMS(Least Mean Squre)算法% 输⼊参数:% xn 输⼊的信号序列 (列向量)% dn 所期望的响应序列 (列向量)% M 滤波器的阶数 (标量)% mu 收敛因⼦(步长) (标量) 要求⼤于0,⼩于xn的相关矩阵最⼤特征值的倒数% itr 迭代次数 (标量) 默认为xn的长度,M<itr<length(xn)% 输出参数:% W 滤波器的权值矩阵 (矩阵)% ⼤⼩为M x itr,% en 误差序列(itr x 1) (列向量)% yn 实际输出序列 (列向量)% 参数个数必须为4个或5个if nargin == 4 % 4个时递归迭代的次数为xn的长度itr = length(xn);elseif nargin == 5 % 5个时满⾜M<itr<length(xn)if itr>length(xn) | itr<Merror('迭代次数过⼤或过⼩!');endelseerror('请检查输⼊参数的个数!');end% 初始化参数en = zeros(itr,1); % 误差序列,en(k)表⽰第k次迭代时预期输出与实际输⼊的误差W = zeros(M,itr); % 每⼀⾏代表⼀个加权参量,每⼀列代表-次迭代,初始为0% 迭代计算for k = M:itr % 第k次迭代x = xn(k:-1:k-M+1); % 滤波器M个抽头的输⼊y = W(:,k-1).' * x; % 滤波器的输出en(k) = dn(k) - y ; % 第k次迭代的误差% 滤波器权值计算的迭代式W(:,k) = W(:,k-1) + 2*mu*en(k)*x;end% 求最优时滤波器的输出序列yn = inf * ones(size(xn));for k = M:length(xn)x = xn(k:-1:k-M+1);yn(k) = W(:,end).'* x;endLMS函数的⼀个实例:%function main()close all% 周期信号的产⽣t=0:99;xs=10*sin(0.5*t);figure;subplot(2,1,1);plot(t,xs);grid;ylabel('幅值');title('it{输⼊周期性信号}');% 噪声信号的产⽣randn('state',sum(100*clock));xn=randn(1,100);subplot(2,1,2);plot(t,xn);grid;ylabel('幅值');xlabel('时间');title('it{随机噪声信号}');% 信号滤波xn = xs+xn;xn = xn.' ; % 输⼊信号序列dn = xs.' ; % 预期结果序列M = 20 ; % 滤波器的阶数rho_max = max(eig(xn*xn.')); % 输⼊信号相关矩阵的最⼤特征值mu = rand()*(1/rho_max) ; % 收敛因⼦ 0 < mu < 1/rho[yn,W,en] = LMS(xn,dn,M,mu);% 绘制滤波器输⼊信号figure;subplot(2,1,1);plot(t,xn);grid;ylabel('幅值');xlabel('时间');title('it{滤波器输⼊信号}');% 绘制⾃适应滤波器输出信号subplot(2,1,2);plot(t,yn);grid;ylabel('幅值');xlabel('时间');title('it{⾃适应滤波器输出信号}');% 绘制⾃适应滤波器输出信号,预期输出信号和两者的误差figureplot(t,yn,'b',t,dn,'g',t,dn-yn,'r');grid;legend('⾃适应滤波器输出','预期输出','误差');ylabel('幅值');xlabel('时间');title('it{⾃适应滤波器}');运⾏后的结果如下:。
自适应滤波器MATLAB仿真
自适应滤波器MATLAB仿真摘要:本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS(Least mean squares)算法。
以一个例子演示了自适应滤波器的滤波效果。
实验结果表明,该滤波器滤波效果较好。
关键词:自适应滤波器 MATLAB7.0 LMS算法Simulate of adaptive filter based on MATLAB7.0Abstract:This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single.Key words:LMS algorithm Adaptive Filter Matlab7.01 引言由Widrow B等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。
由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。
自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。
本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。
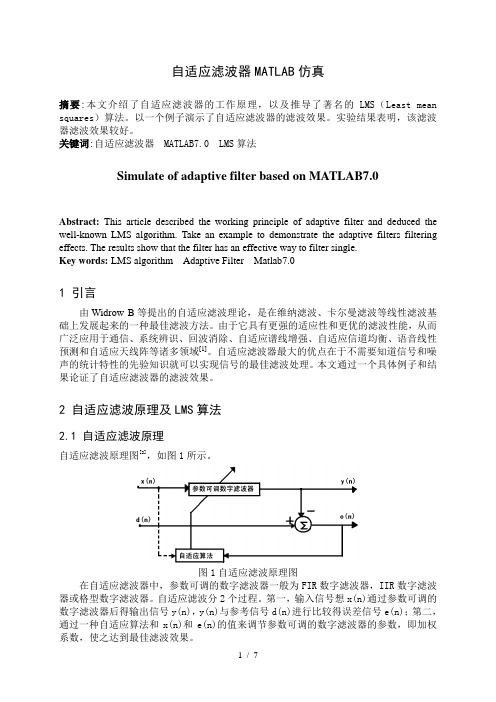
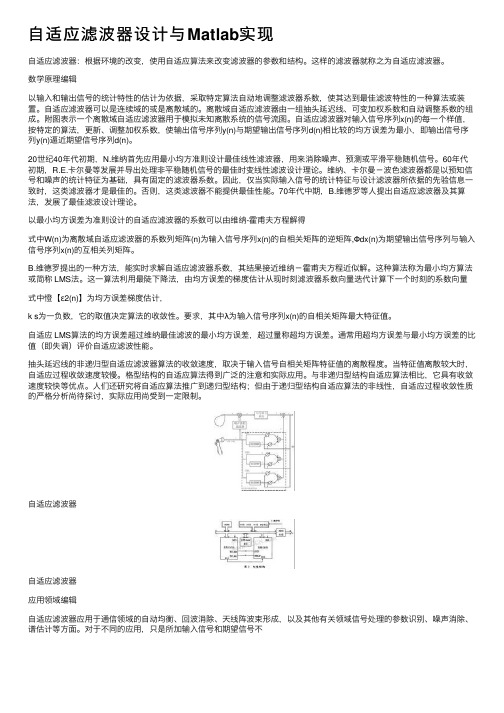
2 自适应滤波原理及LMS算法2.1 自适应滤波原理自适应滤波原理图[2],如图1所示。
图1自适应滤波原理图在自适应滤波器中,参数可调的数字滤波器一般为FIR数字滤波器,IIR数字滤波器或格型数字滤波器。
自适应滤波分2个过程。
第一,输入信号想x(n)通过参数可调的数字滤波器后得输出信号y(n),y(n)与参考信号d(n)进行比较得误差信号e(n);第二,通过一种自适应算法和x(n)和e(n)的值来调节参数可调的数字滤波器的参数,即加权系数,使之达到最佳滤波效果。
MATLAB课程设计自适应中值滤波
采用快速排序算法,提高滤波速度 引入自适应阈值,提高滤波效果 采用并行计算,提高滤波效率 引入图像分割技术,提高滤波精度
课程设计任务和要 求
提 高 M AT L A B 编 程 能 力 掌握自适应中值滤波算法 提高问题解决能力 培养团队合作精神
掌握MATLAB的基 本语法和编程技巧
理解自适应中值滤 波的原理和实现方 法
添加标题
M AT L A B 实 现 自 适 应 中 值 滤 波 : 可 以 使 用 M AT L A B 中 的 i m f i l t e r 函 数 来 实 现 自 适 应 中 值 滤 波 , 该 函数可以方便地实现各种类型的滤波操作。 A B 图 像 处 理 工 具 箱 广 泛 应 用 于 图 像 处 理 、 计 算 机 视 觉 、 模 式 识 别 等 领 域 。
自适应中值滤波算 法介绍
中值滤波是一种非线性滤波技术,通过计算像素邻域的中值来代替像素值,以消除噪 声和模糊图像。
中值滤波可以有效地消除椒盐噪声和随机噪声,但对高斯噪声和脉冲噪声的抑制效果 较差。
中值滤波的缺点是会导致图像细节的丢失,特别是在处理边缘和纹理区域时。
自适应中值滤波是一种改进的中值滤波算法,可以根据图像的局部特性自适应地调整 滤波器的参数,以更好地保留图像的细节和边缘。
添加项标题
函数定义:使用符号"function"进行函数定义,如 "function y = f(x)"
添加项标题
赋值语句:使用符号"="进行赋值,如"x = 1"
添加项标题
条件语句:使用符号"if"、"elseif"、"else"进行条件判断, 如"if x > 0"
自适应扩展卡尔曼滤波matlab

自适应扩展卡尔曼滤波matlab自适应扩展卡尔曼滤波(Adaptive Extended Kalman Filter,AEKF)是一种用于非线性系统状态估计的滤波算法。
本文将介绍AEKF算法的原理、步骤和实现方法,并结合MATLAB 编写代码进行演示。
一、扩展卡尔曼滤波原理扩展卡尔曼滤波(Extended Kalman Filter,EKF)是一种用于非线性系统状态估计的滤波算法。
它通过使用线性化系统模型的方式将非线性系统转换为线性系统,在每个时间步骤中用线性卡尔曼滤波器进行状态估计。
然而,EKF仅限于具有凸多边形测量特性的问题,并且对线性化过程误差敏感。
为了解决这些问题,AEKF通过自适应更新协方差矩阵的方式提高了滤波器的性能。
AEKF通过测量残差的方差更新协方差矩阵,从而提高了滤波器对非线性系统的适应能力。
AEKF算法的步骤如下:1. 初始化状态向量和协方差矩阵。
2. 根据系统的非线性动力学方程和测量方程计算预测状态向量和协方差矩阵。
3. 计算测量残差,即测量值与预测值之间的差值。
4. 计算测量残差的方差。
5. 判断测量残差的方差是否超过预设阈值,如果超过,则更新协方差矩阵。
6. 利用更新后的协方差矩阵计算最优滤波增益。
7. 更新状态向量和协方差矩阵。
8. 返回第2步,进行下一次预测。
二、AEKF算法的MATLAB实现下面,我们将使用MATLAB编写AEKF算法的代码,并通过一个实例进行演示。
首先,定义非线性系统的动力学方程和测量方程。
在本例中,我们使用一个双摆系统作为非线性系统模型。
```matlabfunction x_next = nonlinear_dynamics(x_current, u)% Nonlinear system dynamicstheta1 = x_current(1);theta2 = x_current(2);d_theta1 = x_current(3);d_theta2 = x_current(4);g = 9.8; % Gravitational accelerationd_theta1_next = d_theta1 + dt * (-3*g*sin(theta1) - sin(theta1-theta2) ...+ 2*sin(theta1-theta2)*(d_theta2^2 + d_theta1^2*cos(theta1-theta2))) .../ (3 - cos(2*(theta1-theta2)));d_theta2_next = d_theta2 + dt * (2*sin(theta1-theta2)*(2*d_theta2^2 ...+ d_theta1^2*cos(theta1-theta2) + g*cos(theta1) +g*cos(theta1-theta2))) .../ (3 - cos(2*(theta1-theta2)));theta1_next = theta1 + dt * d_theta1_next;theta2_next = theta2 + dt * d_theta2_next;x_next = [theta1_next; theta2_next; d_theta1_next;d_theta2_next];endfunction y = measurement_model(x)% Measurement model, measure the angles of the double pendulumtheta1 = x(1);theta2 = x(2);y = [theta1; theta2];end```然后,定义AEKF算法的实现。
自适应滤波器原理及matlab仿真应用 相关代码

自适应滤波器原理及matlab仿真应用相关代码文章标题:深度解析自适应滤波器原理及matlab仿真应用1. 引言自适应滤波器是数字信号处理中的重要概念,它可以根据输入信号的特性动态地调整滤波器的参数,从而更好地适应信号的变化。
本文将深入探讨自适应滤波器的原理以及在matlab中的仿真应用,帮助读者深入理解这一重要的概念。
2. 自适应滤波器原理自适应滤波器的原理基于最小均方误差准则,它通过不断调整权值参数,使得滤波器输出与期望输出的误差达到最小。
这一原理可以应用在很多领域,如通信系统、雷达系统以及生物医学工程中。
自适应滤波器能够有效地抑制噪声,提高信号的质量。
3. Matlab仿真应用在matlab中,我们可以利用现成的自适应滤波器函数来进行仿真实验。
通过编写相应的matlab代码,我们可以模拟各种不同的信号输入,并观察自适应滤波器的输出效果。
这对于理论学习和工程应用都具有重要意义。
4. 深入理解自适应滤波器我们可以通过探讨自适应滤波器的各种类型、参数选择以及性能评价指标,来深入理解这一概念。
LMS算法、RLS算法以及SVD方法都是自适应滤波器中常见的算法,它们各自适用于不同的场景,并且有着各自的优缺点。
了解这些算法的原理及应用可以帮助我们更好地理解自适应滤波器的工作机制。
5. 个人观点和总结个人观点:自适应滤波器在现代信号处理中具有极其重要的应用价值,通过对其原理的深入理解和matlab中的仿真实验,我们可以更好地掌握这一概念。
在实际工程中,合理地选择自适应滤波器的类型和参数,并结合matlab仿真,可以提高工程设计的效率和准确性。
总结:通过本文对自适应滤波器原理的深入解析和matlab的仿真应用,希望读者能够更好地理解这一重要概念,并且能够在工程实践中灵活应用。
自适应滤波器是数字信号处理中不可或缺的工具,深入掌握其原理和应用对于提高工程设计的水平具有重要意义。
6. 结束语自适应滤波器原理及matlab仿真应用是一个复杂而又精彩的领域,相信通过不断地学习和实践,我们能够更好地理解和应用这一概念。
自适应中值滤波器的设计与实现

自适应中值滤波器的设计与实现自适应中值滤波器是一种基于信号的局部特性进行处理的滤波器。
它适用于在图像处理中去除椒盐噪声(salt and pepper noise)的任务。
椒盐噪声是一种随机噪声,它会在图像中产生亮或暗的像素点。
自适应中值滤波器的设计和实现可以分为以下几个步骤。
首先,我们需要定义一个滑动窗口的大小,以确定每次滤波的区域。
通常选择一个正方形的窗口,大小通常在3×3到7×7之间。
较小的窗口会导致噪声较少的图像细节损失,但也可能无法完全去除噪声。
较大的窗口可以去除更多的噪声,但可能会模糊图像。
接下来,我们需要确定中值滤波器的参数。
通常情况下,我们需要选择一个适当的阈值,来判断是否对像素进行滤波。
一个常用的阈值是像素值的标准差的倍数K,如果像素值与其领域的中值之间的差异超过K倍的标准差,则认为该像素是噪声。
为了更好地抑制噪声,阈值K通常选择较大的值。
然而,过大的阈值也可能会导致图像细节的损失。
一种常用的自适应中值滤波器算法是逐级嵌套。
首先使用较小的窗口进行滤波,然后根据滤波结果进行判断。
如果像素的灰度值与中值之间的差异大于阈值,则继续使用较大的窗口进行滤波,直到像素的灰度值与中值之间的差异小于阈值为止。
这种逐级嵌套的方法可以在保留图像细节的同时去除噪声。
在实现自适应中值滤波器时,可以使用编程语言如Python或MATLAB 来编写代码。
首先需要读取图像,并将图像转换为灰度图像。
然后,利用嵌套循环遍历每个像素,并在每个像素的领域内计算中值。
根据阈值判断是否对像素进行滤波,如果需要滤波,则继续使用较大的窗口进行滤波。
最后,将滤波结果保存为新的图像。
需要注意的是,自适应中值滤波器的设计和实现是一个复杂的任务,并且其性能和效果取决于所选择的参数和算法。
因此,在使用自适应中值滤波器时,需要根据具体的应用场景和需求进行适当的调整和优化,以达到较好的滤波效果。
基于MATLAB的自适应滤波器设计
基于MATLAB的自适应滤波器设计自适应滤波器是一种能够根据输入信号的特性自动调整滤波参数的滤波器。
它的核心思想是根据输入信号与期望输出信号之间的误差来更新滤波器的权值,从而实现对输入信号的准确滤波。
在MATLAB中,可以使用自适应滤波器工具箱来设计和实现自适应滤波器。
自适应滤波器工具箱提供了多种自适应滤波器算法的函数和工具,例如LMS(最小均方误差)算法、RLS(递归最小二乘)算法等。
下面以LMS算法为例,介绍如何基于MATLAB进行自适应滤波器设计。
首先,需要准备好输入信号和期望输出信号。
可以使用MATLAB的信号处理工具箱来生成具有特定频率和幅度的输入信号,或者使用已有的实验数据。
期望输出信号可以根据输入信号进行一定的处理得到,或者使用已有的实验数据。
然后,需要选择自适应滤波器的结构和算法。
在MATLAB中,可以使用`dsp.LMSFilter`类来实现LMS算法。
可以根据输入信号和期望输出信号的特性,选择自适应滤波器的阶数、步长等参数。
接下来,可以使用`dsp.LMSFilter`类的对象来进行自适应滤波器的初始化和更新。
可以通过调用`step`方法来实时更新滤波器的权值,并获取输出信号。
具体步骤如下:1. 创建`dsp.LMSFilter`对象,并指定滤波器的阶数和步长。
```matlablmsFilter = dsp.LMSFilter('Length', filterOrder, 'StepSize', stepSize);```2.初始化滤波器的权值。
```matlablmsFilter.Weights = initialWeights;```3.使用循环结构,依次读取输入信号的每个样本,并根据期望输出信号计算滤波器的权值,同时获取输出信号。
```matlabfor i = 1:length(inputSignal)[outputSignal, lmsFilter] = step(lmsFilter, inputSignal(i), desiredOutput(i));end```4.完成滤波器的更新后,可以获取最终的输出信号。
matlab中fir自适应滤波器使用方法
一、fir自适应滤波器简介fir自适应滤波器是一种常用的数字信号处理滤波器,用于对非线性和时变信号进行滤波处理。
它可以根据输入信号和期望输出信号的误差来实时调整滤波器的参数,从而不断优化滤波效果。
在matlab中,可以使用dsp库中的adaptiveFilter函数来实现fir自适应滤波器。
二、fir自适应滤波器的原理fir自适应滤波器的原理是基于最小均方误差准则,通过不断调整滤波器的权重系数,使得滤波器的输出信号尽可能接近期望输出信号。
具体来说,fir自适应滤波器采用LMS(最小均方)算法或RLS(递推最小二乘)算法来更新滤波器的权重系数,以达到滤波效果的优化。
三、fir自适应滤波器在matlab中的实现在matlab中,可以使用dsp库中的adaptiveFilter函数来实现fir 自适应滤波器。
该函数支持LMS算法和RLS算法,并提供了丰富的参数设置和功能选项,可以灵活地应用于各种信号处理场景。
下面将介绍在matlab中如何使用adaptiveFilter函数来实现fir自适应滤波器。
四、在matlab中使用LMS算法实现fir自适应滤波器1. 创建一个代表输入信号的向量x,和一个代表期望输出信号的向量d。
2. 调用adaptiveFilter函数,设置滤波器的参数和算法选择,如:fir1 = dsp.AdaptiveLMSFilter('Length',8,'Method','LMS');3. 接下来,使用fir1滤波器对输入信号x进行滤波处理,得到输出信号y = fir1(x,d)。
4. 根据滤波器的输出结果y和期望输出信号d,评估滤波效果并调整滤波器的参数。
五、在matlab中使用RLS算法实现fir自适应滤波器1. 类似地,首先创建输入信号向量x和期望输出信号向量d。
2. 调用adaptiveFilter函数,设置滤波器的参数和算法选择,如:fir2 = dsp.AdaptiveLMSFilter('Length',8,'Method','RLS');3. 使用fir2滤波器对输入信号x进行滤波处理,得到输出信号y = fir2(x,d)。
时域自适应滤波算法分析及Matlab实现

=
Ee nlE(( 一 ( ) [() [ = d ) )]
比较 短 ;
矩阵。 P=E ) ] Nx 互 相 关矩 阵 , 4结论 [ ()为 l
表示 理想信 号 力 与输入 信号矢量 的相关 性 。 ) 在 均 方 误 差 最 小 时 , 佳 权 系分 为 经典 滤 波 器 和 现 代 滤 波 器 , 典 滤 波 器 只 能 处 理 信 号 和 噪 声 的 频 经 谱 不 重 叠 的 情 况 , 果 信 号 和 噪 声 的 频 谱 如 重 叠 , 么经 典 滤 波 器将 无能 为 力 , 现 代 那 而 滤 波 器 是 将 信 号 和 噪 声都 视 为 随 机 信 号 , 利 用 他 们 的 特 征 , 含 有 噪 声 的 数 据 记 录 从 中 估 计 出信 号 的 某 些 特 征 或 信 号 本 身 。 自 适 应 滤 波 理论 是 现 代 信 号 处 理 理 论 的 重 要 组成部分 , 它对 复 杂 信 号 的 处 理 有 其 独 特 的功能 , 自适 应 滤 波 是 在 一 些 信 号 和 噪 声 特 性 无法 预 知 或 他 们 是 随 时 间 变 化 的 情 况 下, 自适 应 滤 波 器 通 过 自适 应 滤 波 算 法 调 整 滤 波 器 系 数 【 , 得 滤 波 器 的特 性 随 信 】 使 t 号 和 噪 声 的 变 化 而 变 化 , 达 到 最 优 滤 波 以 的 效 果 。 时 的 对 信 道 上 的 干 扰 进 行 自适 实 应 的滤 除 , 弱 干扰 的应 有 能 力 , 文 主要 消 本 分 析 在 一 定 的 信 噪 比 范 围 内 , MS自适 应 L 算 法 的 滤 波 效 果 , 通 过 Ma lb 真 对 算 并 ta 仿 法的滤波效果进行分析 。
自适应滤波器设计与Matlab实现
⾃适应滤波器设计与Matlab实现⾃适应滤波器:根据环境的改变,使⽤⾃适应算法来改变滤波器的参数和结构。
这样的滤波器就称之为⾃适应滤波器。
数学原理编辑以输⼊和输出信号的统计特性的估计为依据,采取特定算法⾃动地调整滤波器系数,使其达到最佳滤波特性的⼀种算法或装置。
⾃适应滤波器可以是连续域的或是离散域的。
离散域⾃适应滤波器由⼀组抽头延迟线、可变加权系数和⾃动调整系数的组成。
附图表⽰⼀个离散域⾃适应滤波器⽤于模拟未知离散系统的信号流图。
⾃适应滤波器对输⼊信号序列x(n)的每⼀个样值,按特定的算法,更新、调整加权系数,使输出信号序列y(n)与期望输出信号序列d(n)相⽐较的均⽅误差为最⼩,即输出信号序列y(n)逼近期望信号序列d(n)。
20世纪40年代初期,N.维纳⾸先应⽤最⼩均⽅准则设计最佳线性滤波器,⽤来消除噪声、预测或平滑平稳随机信号。
60年代初期,R.E.卡尔曼等发展并导出处理⾮平稳随机信号的最佳时变线性滤波设计理论。
维纳、卡尔曼-波⾊滤波器都是以预知信号和噪声的统计特征为基础,具有固定的滤波器系数。
因此,仅当实际输⼊信号的统计特征与设计滤波器所依据的先验信息⼀致时,这类滤波器才是最佳的。
否则,这类滤波器不能提供最佳性能。
70年代中期,B.维德罗等⼈提出⾃适应滤波器及其算法,发展了最佳滤波设计理论。
以最⼩均⽅误差为准则设计的⾃适应滤波器的系数可以由维纳-霍甫夫⽅程解得式中W(n)为离散域⾃适应滤波器的系数列矩阵(n)为输⼊信号序列x(n)的⾃相关矩阵的逆矩阵,Φdx(n)为期望输出信号序列与输⼊信号序列x(n)的互相关列矩阵。
B.维德罗提出的⼀种⽅法,能实时求解⾃适应滤波器系数,其结果接近维纳-霍甫夫⽅程近似解。
这种算法称为最⼩均⽅算法或简称 LMS法。
这⼀算法利⽤最陡下降法,由均⽅误差的梯度估计从现时刻滤波器系数向量迭代计算下⼀个时刻的系数向量式中憕【ε2(n)】为均⽅误差梯度估计,k s为⼀负数,它的取值决定算法的收敛性。
自适应中值滤波代码matlab

自适应中值滤波代码matlab自适应中值滤波是一种常用的图像处理方法,可以有效地去除图像中的噪声。
本文将介绍如何使用MATLAB实现自适应中值滤波,并对其原理进行解析。
自适应中值滤波是一种非线性滤波方法,它可以根据图像的不同区域对每个像素进行滤波处理。
与传统的中值滤波方法不同,自适应中值滤波方法可以根据像素的邻域灰度值的分布情况来动态地调整滤波窗口的大小,从而更好地保留图像的细节信息。
在MATLAB中,可以使用medfilt2函数来实现自适应中值滤波。
该函数的语法格式如下:B = medfilt2(A,[m n])其中,A表示待滤波的图像,[m n]表示滤波窗口的大小。
在自适应中值滤波中,滤波窗口的大小会根据像素的邻域灰度值的分布情况进行调整。
下面我们将通过一个实例来演示如何使用MATLAB实现自适应中值滤波。
假设我们有一张带有噪声的图像,我们首先读入该图像并显示出来:```matlabA = imread('noisy_image.jpg');imshow(A);```接下来,我们可以使用medfilt2函数对该图像进行自适应中值滤波:```matlabB = medfilt2(A,[3 3]);imshow(B);```在上述代码中,我们使用了一个3x3的滤波窗口对图像进行滤波处理。
可以根据实际情况调整滤波窗口的大小。
通过对比原始图像和滤波后的图像,我们可以清楚地看到滤波后的图像中的噪声明显减少,图像的细节信息得到了较好的保留。
自适应中值滤波是一种非常实用的图像处理方法,它可以在去除噪声的同时保持图像的细节信息。
MATLAB提供了方便的函数来实现自适应中值滤波,可以根据实际情况选择合适的滤波窗口大小。
需要注意的是,自适应中值滤波方法对噪声的去除效果受到滤波窗口大小的影响。
如果滤波窗口过小,可能无法有效去除噪声;如果滤波窗口过大,可能会模糊图像的细节信息。
因此,在使用自适应中值滤波方法时,需要根据实际情况选择合适的滤波窗口大小。
自适应滤波器原理及matlab仿真应用
自适应滤波器原理及matlab仿真应用自适应滤波器原理及MATLAB仿真应用一、引言自适应滤波器是一种能够自动调整参数以适应环境变化的滤波器。
它能够根据输入信号的特性和所需滤波效果,动态地调整滤波器的参数,从而实现对信号的优化处理。
自适应滤波器在许多领域都有广泛的应用,如通信系统、图像处理、声音处理等。
本文将介绍自适应滤波器的工作原理,并通过MATLAB仿真展示其在实际应用中的效果。
二、自适应滤波器原理自适应滤波器的核心思想是根据输入信号的统计特性以及期望输出信号的特性,通过调整滤波器的权值参数,使得滤波器输出信号尽可能接近期望输出信号。
其基本原理可以概括为以下几个步骤:1. 初始化滤波器的权值参数,一般可以设置为0或者随机值。
2. 输入信号通过滤波器后得到输出信号。
3. 根据输出信号与期望输出信号之间的误差,调整滤波器的权值参数。
4. 重复步骤2和步骤3,直到滤波器输出信号达到期望输出信号的要求。
自适应滤波器的关键在于如何调整滤波器的权值参数。
常用的调整算法有最小均方误差(LMS)算法、最小误差平方和(RLS)算法等。
这些算法通过不断迭代,逐渐调整权值参数,使得滤波器的输出信号与期望输出信号之间的误差逐渐减小,从而达到滤波的目的。
三、MATLAB仿真应用MATLAB是一种功能强大的数学计算和仿真软件,广泛应用于各个科学领域。
在自适应滤波器的仿真中,MATLAB提供了许多有用的函数和工具箱,可以方便地进行滤波器参数的计算和调整。
我们需要定义输入信号和期望输出信号。
可以使用MATLAB中的随机函数生成一组随机信号作为输入信号,然后根据需求定义期望输出信号。
在实际应用中,期望输出信号可以是某种理想信号或者已知的参考信号。
接下来,我们可以使用MATLAB中的自适应滤波器函数对输入信号进行滤波处理。
MATLAB提供了adapthfilt函数和nlms函数等用于自适应滤波的函数,可以根据需求选择合适的函数进行滤波处理。
在Matlab中实现自适应滤波算法的实践指南

在Matlab中实现自适应滤波算法的实践指南引言:自适应滤波算法是一种重要的信号处理技术,在许多领域都得到了广泛的应用。
它通过实时调整滤波器参数来适应信号的变化,从而提高信号去噪和信号恢复的效果。
本文将介绍如何使用Matlab实现自适应滤波算法,并给出一些实践指导。
一、自适应滤波的原理自适应滤波算法的核心思想是根据信号的统计特性来调整滤波器的参数。
常见的自适应滤波算法包括LMS(最小均方)算法和RLS(递推最小二乘)算法。
LMS算法通过不断地调整滤波器的权值来使预测误差最小化;RLS算法则通过递推最小化滤波器的误差代价函数来更新权值。
这两种算法都可以实现自适应滤波的目的,但是在不同的应用场景中可能有差异。
二、Matlab中的自适应滤波函数在Matlab中,提供了一些方便实现自适应滤波算法的函数。
其中最常用的是`nlms`函数和`rls`函数。
`nlms`函数实现了LMS算法,可以用于实时的自适应滤波;`rls`函数实现了RLS算法,适用于更复杂的信号恢复任务。
三、使用`nlms`函数实现自适应滤波下面以一个简单的例子来说明如何使用`nlms`函数实现自适应滤波。
假设我们有一个带噪声的正弦信号,我们可以通过自适应滤波来去除噪声。
首先,我们生成一个1000个采样点的正弦信号,并添加高斯白噪声。
```matlabt = 0:0.1:100;x = sin(t);noise = 0.5*randn(size(t));y = x + noise;```接下来,我们使用`nlms`函数进行自适应滤波。
首先,我们需要初始化滤波器权重。
通常可以将初始权重设置为0或者一个很小的值。
然后,我们使用一个循环来逐步更新滤波器权重,直到达到滤波的要求。
```matlaborder = 10; % 滤波器阶数mu = 0.1; % 步长参数w = zeros(order+1, 1); % 初始化滤波器权重for i = order+1:length(y)input = y(i:-1:i-order); % 输入信号output = input' * w; % 滤波输出error = x(i) - output; % 预测误差w = w + mu * input * error; % 权重更新end```最后,我们可以将滤波器的输出与原始信号进行对比,评估滤波效果。
自适应滤波器的MATLAB实现
3 自适应滤波器的应用
自适应滤波器具有在未知环境下良好运行并跟踪时变输入统计量的能力, 使得自适应滤波器成为信号 处理和自动控制应用的有力手段。实际上,自适应滤波器已经成功的应用与雷达、通信、声纳、地震学和 生物医学工程等领域。这些应用在特性方面千变万化,但有一个共同的基本特征,即用输入向量和期望响 应来计算估计误差,并用该误差依次控制一组可调滤波器系数。然而自适应滤波器各种应用之间的本质不 同在于其期望响应的获取方式不同,根据这一原则,可将自适应滤波器应用分为四种类型,如下:
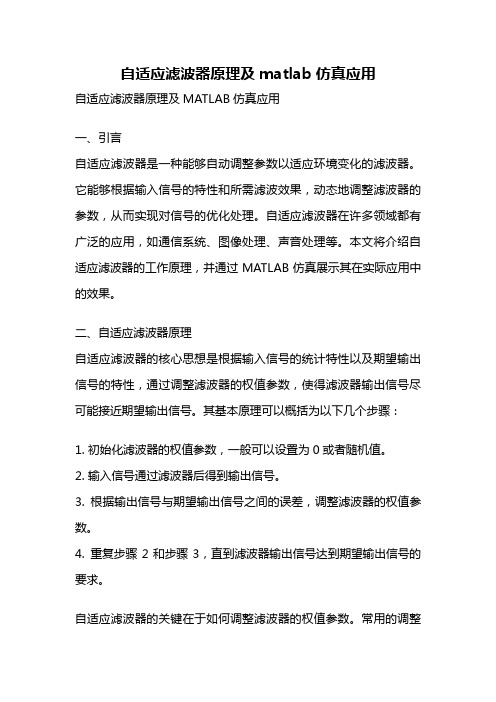
横向型滤波器
上图是横向型滤波器的结构示意图。其中:x(n)为自适应滤波器的输入;w(n)为自适应滤波器的冲激 响 应 ; w(n)={ w(0) , w(1) , … , w(N-1) } ; y(n) 为 自 适 应 滤 波 器 的 输 出 ; y(n)= x(n)* w(n) 。 即
N −1
y (n ) = W T ( n) X ( n) = ∑ wi ( n) x (n − i )
w = w+u*u3*conj(err);%权向量的更新 u3 = u4(n+N-1:-1:n);%更新输入向量 u3 = [u4(n+1) u4(n)] d = conj(w)*(u3.');%期望信号估计 err = u4(n+2)-d;%估计误差 Jn(n) = (abs(err)).^2;%均方误差 end Jn_aver = Jn_aver+Jn; W = W+w; end EJex_inf = u*var_v*(p1+p2)/(2-u*(p1+p2))%剩余均方误差统计平均值 E[Jex(inf)] M1 = EJex_inf/var_v%计算理论失调 W = W./K%权向量 Jn_aver = Jn_aver./K; Jex_n = Jn_aver(N2)-var_v%n 次迭代后的剩余均方误差值 M2 = Jex_n/var_v%n 次迭代后的失调 plot(Jn_aver); title(['LP(2)LMS 学习曲线 u=0.05, w=',num2str(W)]) grid on xlabel('n/迭代次数'); ylabel('E[Jn(n)]'); axis([1 512 0 1.5]);
自适应滤波器rls算法matlab

自适应滤波器中的递归最小二乘(RLS)算法是一种用于自适应滤波的算法,通常用于系统辨识和信号处理。
这个算法主要用于根据输入和输出信号的关系来自适应地更新滤波器的权重,以达到最小均方误差的目标。
下面是一个简单的 MATLAB 示例,演示如何使用 RLS 算法实现自适应滤波器:
在这个示例中,我们首先生成一个随机的输入信号input_signal,然后使用一个未知
系统unknown_system生成目标输出信号desired_output。
接着,我们使用 RLS 算法不断更新滤波器的权重w,并最终比较估计的系统与真实系统的系数。
请注意,RLS 算法是一种高级的自适应滤波器算法,其背后的数学原理较为复杂。
在实际应用中,可以根据具体情况调整算法参数和输入信号来满足特定的需求。
自适应滤波器matlab实现

自适应数字滤波器matlab实现利用自适应滤波法研究从宽带信号中提取单频信号的方法:1.设x(t)=s(t)+cos(2*pi*f*t), s(t)是宽带信号,f任选,要求提取cos(2*pi*f*t).、解:设单频信号频率f=1Hz,宽频信号s(t) 均值为0,方差为的白噪声。
以时间间隔Ts对输入信号进行采样,得到num个采样数据进行实验。
采用LMS准则的横向自适应滤波器W对x(t)进行自适应滤波,滤波器阶数(抽头数)为N,滤波器采用最陡下降法更新系数,调整步长为u。
将输入信号延迟delay个单位作为参考输入,因为宽频噪声延迟后的自相关值几乎为0,而单频周期信号仍有很强的相关性,因此通过递归调整,即可将宽频信号和单频信号分离。
通过取不同的实验参数,可以发现,调整步长越大,滤波器的抽头数越多,输出收敛于期望信号的速度越快,但与此同时,稳态误差却越大。
因此,应该选用合适的步长和阶数,在收敛速度和性能上取得权衡。
另外,延迟时间间隔越大,宽带信号的自相关性越弱,最终得到的输出稳态误差也越小,但所花费的时间也越长。
具体实验代码和实验结果如下:Ts=0.01; % 采样间隔num=1500; % 采样点数delay=100;% 延迟间隔N=10; % 滤波器抽头数u=0.001; % 调整步长k=1:num;f=cos(2*pi*k*Ts); % 单频信号s=0.5*randn(1,num);% 宽频信号x=s+f; % 输入信号x_in=[x zeros(1,delay)]; % 当前的输入信号x_delay=[zeros(1,delay),x]; % 延迟的输入信号M=num+delay;y=zeros(1,M); % 输出初始值w=zeros(1,N); % 滤波系数初始值for n=N:M-N+1xx=x_delay(n+N-1:-1:n); % 滤波器输入值y(n)=w*xx'; % 滤波器输出值e(n)=x_in(n)-y(n); % 误差值w=w+2*u.*e(n).*xx; % 系数调整endsubplot(4,1,1);plot(f(1:num));ylim([-2 2]);title('无噪声单频信号波形');subplot(4,1,2);plot(x(1:num));ylim([-2 2]);title('受宽带干扰的输入信号波形');subplot(4,1,3);plot(y(1:num));ylim([-2 2]);title('提取的单频信号波形');subplot(4,1,4);plot(e(1:num));ylim([-2 2]);title('滤去的宽带信号波形');程序运行输出:无噪声单频信号波形滤去的宽带信号波形。
自适应滤波器设计及MatLab实现研究

理 器后 产 生 输 出 信 号 , 然 后 和 作 为 参 考 的 输 入 信 号进 行 对 比 , 产生 误 差输 出信 号 , 通 过 设 计 的 自适 应 滤 波 算 法 的反 馈 调 节 调 整 滤 波器的参数 , 最 终 输 出误 差 信 号 均 方 差 的 最小值 。 自 适 应 滤 波 器的 算 法 决 定 着 滤 波 器参考信号 的处理能 力, 在 最 佳 准 则 条 件 下 算 法 能 够 大 大 提 高 其 输 出信 噪 比 。 自 适 应 算 法 通 常 可 以 分 为 最 小 均 方 算 法 ( L MS ) 和递推 最 小二 乘 算法 ( RL S ) , L MS 算 3 自适 应滤波器的M a t L a b 仿真分析 法简单 、 运算方便 、 易于实现 , 但 收 敛 的 速 在MAT L AB中 , 信号 处理 工具 箱可 以 度相对较慢 , 且 其 速 度 和输 入 信 号 的 统 计 看 作 工 具 集 合 , 包含生成 波 形 、 设 计 滤 波 特性直接相 关。 器、 参 数 模 型 以 及 频 谱 分 析 等 多 个 常见 功 能, 使 用MAT L A B 信号 处 理 工具 箱 , 可以很 2 自适应滤波器 的L MS 算法 方 便 地 求 解 数 字 滤 波 器 问题 , 同时 还 可 以 L MS 算 法 是 自适 应 滤 波 器 的 基 础 , 是 十 分 便 捷 地 在 图 形化 界 面 上 编 辑 和 修 改数 种 随 机性 递 推 算 法 , 该 算 法 主 要 包 含 下 字 滤波 。 对 设 计 的L Ms 算 法 在 Ma t L a b 上进 面 三个 方程 : y ( k ) :∑ w( i ) x ( k — i +1 ) 行 仿 真 实验 , 选 取 自适 应 步 长 为0 . 0 0 0 6 , 对 e ( k ) = d ( k ) 一 y ( k ) 比信噪 比分 别取 2 0 d B , 5 d B 和一 5 d B 时 自适
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 2研究目标及现状……………………………………………………………1
1. 2 .1图像复原技术的目标……………………………………………1
1. 2 .2图像复原技术的研究现状………………………………………1
2理论基础…………………………………………………………………………3
维纳自适应滤波器设计及Matlab实现
(毕业论文课题设计)
姓名:
学号:
年级:
专业:
指导教师:
完成日期:
摘要
本文从随机噪声的特性出发,分析了传统滤波和自适应滤波基本工作原理和性能,以及滤波技术的现状和发展前景。然后系统阐述了基本维纳滤波原理和自适应滤波器的基本结构模型,接着在此基础上结合最陡下降法引出LMS算法。在MSE准则下,设计了一个定长的自适应最小均方横向滤波器,并通过MATLAB编程实现。接着用图像复原来验证该滤波器的性能,结果表明图像的质量在MSE准则下得到了明显的改善。最后分析比较了自适应LMS滤波和频域维纳递归滤波之间的性能。本文还对MATLAB里面的自适应维纳滤波函数wiener2进行了简单分析。
We also simply analyses the wiener2 () which is a adaptive filter in MATLAB.
Keywords:degrade image;wiener filter;adaptive filter;ADF;LMS algorithm
1绪论…………………………………………………………………………………1
4.2.LMS滤波器和频域迭代维纳滤波器的性能比较……………………16
5总结………………………………………………………………………………18
致谢…………………………………………………………………………………19
参考文献……………………………………………………………………………20
附录A ………………………………………………………………………………21
在图像的获取和传输过程中所混入的噪声,主要来源于通信系统中的各种各样的噪声,根据通信原理及统计方面的知识,可以知道在通信系统中所遇到的信号和噪声,大多数均可视为平稳的随机过程[15]。又有“高斯过程又称正态随机过程,它是一种普遍存在和重要的随机过程,在通信信道中的噪声,通常是一种高斯过程,故又称高斯噪声。因此,在大多数的情况下,我们可以把造成图像失真的噪声可视为广义平稳高斯过程。
3.1.2最陡下降算法稳定性……………………………………………10
3.2 LMS滤波原理及算法……………………………………………………11
3.2.1从最陡下降算法导出LMS算法………………………………11
3.2.2基本LMS算法的实现步骤……………………………………11
3.2.3基本LMS算法的实现流程图…………………………………12
2. 1基本自适应滤波器的模块结构……………………………………………3
2. 2基本维纳滤波原理…………………………………………………………4
3自适应滤波原理及算法………………………………………………………6
3.1横向滤波结构的最陡下降算法……………………………………………7
3.1.1最陡下降算法的原理……………………………………………7
附录B ………………………………………………………………………………22
附录C ………………………………………………………………………………27
1绪论
1.1引言
人类传递信息的主要媒介是语言和图像。据统计,在人类接受的信息中,听觉信息占20%,视觉信息占60%,其它如味觉、触觉、嗅觉总的加起来不过占20%,所以图像信息是十分重要的信息[1]。然而,在图像的获取和图像信号的传输过程中,图像信号中不可避免的混入各种各样的随机噪声,造成图像失真(图像退化)。造成人类所获取的信息和实际是有偏差的,成为人类从外界获取准确信息的障碍。因此,对图像信号中的随机噪声的抑制处理是图像处理中非常重要的一项工作。
3.2.4 LMS算法的Matlab实现………………………………………12
3.2.5 wiener2()的原理……………………………………………12
3.2.6 LMS性能分析——自适应收敛性……………………………13
4Matlab实验结果…………………………………………………………14
4.1.LMS滤波器的收敛性………………………ቤተ መጻሕፍቲ ባይዱ……………………14
关键字:退化图像维纳滤波自适应滤波最陡下降法LMS
Abstract
This paper analyses the basic work theory, performance of traditional filter and adaptive filter based on the property of random noise, and introduce the status quo and the foreground of filter technology. Then we explain basic theory of wiener filter and basic structure model of adaptive filter, and combine themethod of steepest descentto deduce the LMS. Afterward according to the MSE rule, we design a limited lengthtransversal filter, and implement by MATLAB. And then we validate performance of adaptive LMS filter by restoring images, Test result show that the quality of the degrade images were improved under the rule of MSE. Finally, we compare the performance of adaptive LMS filter and iterative wiener filter.