德国BALLUFF(巴鲁夫)
德国BALLUFF巴鲁夫位移传感器工作原理巴鲁夫位移传感器具有无

德国BALLUFF巴鲁夫位移传感器工作原理巴鲁夫位移传感器具有无滑动触点,工作时不受灰尘等非金属因素的影响,并且低功耗,长寿命,可使用在各种恶劣条件下。
位移传感器主要应用在自动化装备生产线对模拟量的智能控制。
位移是和物体的位置在运动过程中的移动有关的量,位移的测量方式所涉及的范围是相当广泛的。
小位移通常用应变式、电感式、差动变压器式、涡流式、霍尔传感器来检测,大的位移常用感应同步器、光栅、容栅、磁栅等传感技术来测量。
其中光栅传感器因具有易实现数字化、精度高(目前分辨率最高的可达到纳米级)、抗干扰能力强、没有人为读数误差、安装方便、使用可靠等优点,在机床加工、检测仪表等行业中得到日益广泛的应用。
巴鲁夫位移传感器的功能在于把直线机械位移量转换成电信号。
为了达到这一效果,通常将可变电阻滑轨定置在传感器的固定部位,通过滑片在滑轨上的位移来测量不同的阻值。
传感器滑轨连接稳态直流电压,允许流过微安培的小电流,滑片和始端之间的电压,与滑片移动的长度成正比。
将传感器用作分压器可最大限度降低对滑轨总阻值精确性的要求,因为由温度变化引起的阻值变化不会影响到测量结果。
德国BALLUFF巴鲁夫位移传感器工作原理产品优势:高分辨率、高重复性和高线性抗震动、抗干扰场探测液压驱动装置 (如风力发电设备) 的活塞位置监测注塑机或加工中心内的线性运动监控配料及混合单元内的料位德国BALLUFF巴鲁夫位移传感器部分产品型号:BTL0E1E BTL5-S171B-M0200-P-S32BTL0E30 BTL5-S172B-M1000-P-S32BTL0EM1 BTL5-S177B-M0225-P-KA05BTL0EWY BTL5-S112B-M0500-P-S32BTL0H8Y BTL5-S112B-M0300-P-S32BTL0HA1 BTL5-S112B-M1125-P-S32BTL0HA3 BTL5-S112B-M1535-P-S32BTL0HA4 BTL5-S112B-M1625-P-S32BTL0J0Y BTL5-S162-M4500-P-SA303-S32BTL0JR6 BTL5-S186-M2150-P-S32BTL0K2Z BTL5-S113B-M0250-P-S32BTL0L78 BTL5-S101B-M0300-P-S32BTL0LWK BTL5-S171B-M1500-P-SA244-S32BTL0M5C BTL5-S171B-M2000-P-S32德国BALLUFF巴鲁夫位移传感器工作原理BTL0N5E BTL5-S163-M2250-P-S32BTL0NPM BTL5-S113B-M2300-P-S32BTL0NRC BTL5-S101-M0600-P-SA243-S32BTL0P0L BTL5-S171B-M0900-P-KA15BTL0P10 BTL5-S111B-M0500-P-KA05SET00AA BTL5-S114-M0600-P-S32/KRUPP KAUTEX BTL00KJ BTL5-T110-M0450-P-S103BTL00NZ BTL5-T110-M0900-P-S103BTL00TL BTL5-T110-M0050-P-S103BTL00ZZ BTL5-T110-M0750-P-S103BTL0100 BTL5-T110-M1750-P-S103BTL0100 BTL5-T110-M1750-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL0137 BTL5-T110-M1000-P-S103BTL01N4 BTL5-T110-M0550-P-S103BTL01N8 BTL5-T110-M0175-P-S103BTL01RU BTL5-T110-M0400-P-S103BTL0284 BTL5-T110-M0100-P-S103BTL028J BTL5-T120-M1000-P-S103BTL02C4 BTL5-T110-M0130-P-S103BTL03A3 BTL5-T110-M0350-P-S103BTL03H0 BTL5-T110-M0150-P-S103BTL03H2 BTL5-T110-M0200-P-S103BTL03H3 BTL5-T110-M0225-P-S103BTL03H5 BTL5-T110-M0250-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03H9 BTL5-T110-M0300-P-S103BTL03HA BTL5-T110-M0300-P-SA268-S103BTL03HF BTL5-T110-M0400-P-SA160-S103BTL03HJ BTL5-T110-M0500-P-S103BTL03HM BTL5-T110-M0600-P-S103BTL03HP BTL5-T110-M0650-P-S103BTL03HT BTL5-T110-M0700-P-S103BTL03HW BTL5-T110-M0800-P-S103BTL03HZ BTL5-T110-M1400-P-S103BTL03J0 BTL5-T110-M1600-P-S103BTL03J1 BTL5-T110-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03J1 BTL5-T110-M2000-P-S103BTL03J2 BTL5-T110-M2050-P-S103BTL03J3 BTL5-T110-M2100-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J4 BTL5-T110-M2150-P-S103BTL03J5 BTL5-T110-M2200-P-S103BTL03J7 BTL5-T110-M3100-P-S103BTL03J9 BTL5-T120-M0700-P-S103BTL03JC BTL5-T120-M1750-P-S103BTL03JF BTL5-T120-M2000-P-S103德国BALLUFF巴鲁夫位移传感器工作原理BTL03JH BTL5-T120-M2250-P-S103BTL08R2 BTL5-T110-M1250-P-S103BTL09AL BTL5-T120-M4250-P-SA303-S103 BTL0JJ6 BTL5-T120-M2100-P-S103BTL0K77 BTL5-T110-M0930-P-S103BTL0K8F BTL5-T110-M4500-P-SA303-S103 BTL0N5C BTL5-T110-M2400-P-S103BTL5-T110-M0500-P-S103 (V2)BTL5-T110-M1800-P-S103 (V2)BTL5-T110-M0250-B-S103 (V2)BTL0469 BTL5-Q5020-M0508-P-S140BTL046K BTL5-Q5021-M0457-P-S140德国BALLUFF巴鲁夫位移传感器工作原理BTL049C BTL5-Q5222-M0203-P-S140BTL049E BTL5-Q5222-M1000-P-S140BTL049H BTL5-Q5231-M0051-P-S140BTL049K BTL5-Q5231-M0407-P-S140BTL04C4 BTL5-Q5621-M0077-P-S140BTL04C9 BTL5-Q5631-M0203-P-S140BTL04EF BTL5-Q5654-M0305-P-S140BTL00Z5 BTL5-D112-M0350-P-S93BTL03AM BTL5-D112-M0050-P-S93BTL03AN BTL5-D112-M0150-P-S93BTL03AP BTL5-D112-M0175-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03AR BTL5-D112-M0200-P-S93BTL03AT BTL5-D112-M0250-P-S93BTL03AU BTL5-D112-M0300-P-S93BTL03AW BTL5-D112-M0400-P-S93BTL03AY BTL5-D112-M0450-P-S93BTL03AZ BTL5-D112-M0600-P-S93BTL03C0 BTL5-D112-M0650-P-S93BTL03C1 BTL5-D112-M0700-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C2 BTL5-D112-M0850-P-S93BTL03C3 BTL5-D112-M1000-P-S93德国BALLUFF巴鲁夫位移传感器工作原理BTL03C4 BTL5-D112-M1200-P-S93BTL03C5 BTL5-D112-M1250-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C6 BTL5-D112-M1500-P-S93BTL03C7 BTL5-D112-M1600-P-S93BTL03C8 BTL5-D112-M1900-P-S93BTL03C9 BTL5-D112-M3250-P-S93BTL03CA BTL5-D114-M0500-P-S93BTL03CC BTL5-D114-M1200-P-S93BTL0CAH BTL5-D112-M1950-P-S93BTL0E91 BTL5-D112-M0500-P-S93BTL0JN1 BTL7-E170-M0075-B-NEX-S32 BTL00MR BTL5-A11-M0300-B-KA05BTL0150 BTL5-A11-M0300-B-S32BTL015U BTL5-A11-M0050-B-S32BTL015Y BTL5-A11-M0100-B-KA05BTL015Z BTL5-A11-M0100-B-S32BTL0160 BTL5-A11-M0120-B-SA225-KA01 BTL0161 BTL5-A11-M0125-B-S32BTL0162 BTL5-A11-M0150-B-S32BTL0163 BTL5-A11-M0175-B-KA05BTL0164 BTL5-A11-M0175-B-S32BTL0166 BTL5-A11-M0200-B-S32BTL0167 BTL5-A11-M0200-B-SA42-KA05 BTL0168 BTL5-A11-M0225-B-S32BTL0169 BTL5-A11-M0250-B-S32BTL016A BTL5-A11-M0275-B-S32BTL016E BTL5-A11-M0290-B-SA225-KA01 BTL016F BTL5-A11-M0300-B-SA56-S32 BTL016L BTL5-A11-M0340-B-SA56-S32 BTL016M BTL5-A11-M0350-B-S32BTL016P BTL5-A11-M0400-B-S32BTL016T BTL5-A11-M0450-B-S32BTL016U BTL5-A11-M0500-B-S32BTL016Z BTL5-A11-M0500-B-SA56-S32 BTL0170 BTL5-A11-M0550-B-S32BTL0171 BTL5-A11-M0580-B-SA56-S32 BTL0172 BTL5-A11-M0600-B-S32BTL0174 BTL5-A11-M0650-B-S32BTL0175 BTL5-A11-M0650-B-SA56-S32BTL0177 BTL5-A11-M0750-B-S32BTL0178 BTL5-A11-M0800-B-S32BTL0179 BTL5-A11-M0800-B-SA56-S32 BTL017A BTL5-A11-M0900-B-S32BTL017C BTL5-A11-M1000-B-S32BTL017E BTL5-A11-M1100-B-S32BTL017H BTL5-A11-M1500-B-S32BTL017K BTL5-A11-M4200-B-S32BTL017L BTL5-A11-M4300-B-S32BTL017M BTL5-A11-M4450-B-S32BTL0313 BTL5-A11-M0030-B-S32BTL0C83 BTL5-A11-M0325-B-S32BTL0F7U BTL5-A11-M2750-B-S32BTL0FNP BTL5-A11-M0400-B-KA05BTL0FNR BTL5-A11-M1800-B-KA05BTL0FNT BTL5-A11-M4000-B-S32BTL0L66 BTL5-A11-M0960-B-SA56-S32 BTL0NM7 BTL5-A11-M1535-B-S32BTL017U BTL5-C10-M0350-B-S32BTL017W BTL5-C17-M0100-B-S32BTL017Y BTL5-C17-M0750-B-KA05BTL017Z BTL5-C17-M0750-B-S32BTL0180 BTL5-C17-M0750-B-SA182-KA05 德国BALLUFF巴鲁夫位移传感器工作原理。
巴鲁夫电感传感器BES产品介绍

供电电压
对于使用直流电源的 开关,输出电路使用 高电容值的PNP(源 极)或NPN型(漏极 )的带保护电路的输 出电路。
对于使用交流电源的开关,使用带 整流桥和保护电路的耐用型晶体管 输出电路。
电感传感器
额定感应距离 sn
可靠动作区域
电感传感器
BES 温度曲线特征
Sensors Worldwide
温度漂移 环境温度
... 温度范围-25 °C 到 +70 °C 内,有效感应距离的变化 按照 EN 60 947-5-2 : sr/sr 10 %.
Ta …保证接近开关动作的感应范围。
电感传感器
BES 指定开关频率
非齐平式的接近开关安装 时(非齐平式)需要提供 一个自由区。 当并排安装,标靶的宽度b 必须:
• min. d • max. da
独立安装
铁
相邻安装
标靶
铁
最小空间尺寸:
感应面上方: 感应面下部: 到下一个开关的: 侧面:
独立安装
3 sn 2 sn
d
相邻安装
3 sn d 2d d
电感传感器
根据EN50 010的标准感应距离 BES
Sensors Worldwide
Sa 感应距离 在允许的工作条件下(包括温度,电压 )可以保证的感应距离。 滞后 Hy 接通动作点和断开动作点之间的距离。
[Hy[s(max)] > Hy[s(min)]].
标靶 可靠非动作区域 指定温度和电压条件下的有
效感应距离su (max)
额定温度和电压时的有效工 作距离sr (max)
微脉冲位移传感器在莱歇立磨系统中的应用及标定方法
微脉冲位移传感器在莱歇立磨系统中的应用及标定方法前言料层厚度是立磨操作非常重要的一个工艺参数。
莱歇在lm46.2+2cs立磨上采用德国巴鲁夫(balluff)btl5-e10-m0150-p-s32型微脉冲位移传感器,用于磨内物料厚度测量,取得了非常好的应用效果。
依据实际工作经验,在此对该传感器仪表在莱歇立磨中的应用及一些注意的问题浅加论述,供借鉴参考。
【中图分类号】tp212.91、巴鲁夫(balluff)btl5-e10-m0150-p-s32传感器安装及使用方法1.1 传感器介绍巴鲁夫(balluff)btl5-e10-m0150-p-s32传感器由电子部分(收发器)、波导管、定位磁铁组成。
检测原件由铝制挤压型材保护,检测元件(波导管)无需提供电源。
电子部分和波导管组成一体,定位磁铁安装在磨机摇臂上。
电子部分用于脉冲信号的发送与接收,以及信号处理和输出;波导管为脉冲信号的传送介质;磁环用于脉冲信号的反射。
工作时,电子部分和波导管保持静止状态,定位磁铁随磨辊摇臂移动,由于电子部分和定位磁铁的位置发生变化,脉冲信号发送和反射产生的延时也随之发生变化,根据不同的延时换算得到位移的变化量。
在微脉冲位移传感器的有效检测行程内,传感器输出信号与位置量成线性关系。
1.2微脉冲位移传感器在莱歇立磨上的安装和调试1.2.1 测量原理1.2.2 安装方法(1)安装时,先将传感器电子部分安装在磨辊轴承座侧面;然后将定位磁铁支架安装在主辊摇臂侧面;最后再定位磁铁用随机螺帽固定后装好保护罩螺栓即可。
(2)微脉冲位移传感器的电气信号连接要采用屏蔽电缆,按照传感器说明书和立磨电气接线图连接到液压系统本地控制盘上。
(3)电子部分防护罩螺栓要防止松动,禁止使用焊接的方法安装;定位磁铁的安装位置与波导管中心线的中心距保持在15~30mm。
1.2.3 传感器使用注意事项(1)在正常的环境条件下,气流和气压的变化对微脉冲位移传感器的工作影响很小;但当气流和气压变化较大时,会使微脉冲位移传感器产生测量误差。
数据驱动数字化创新——访巴鲁夫集团董事总经理florian hermle先生

工业经理人|Industrial Manager文[李峥数字化被视为实现产业转型,满足市场个性化定制需求的技术路径。
无论是工业4.0、数字挛生还是智能制造,技术融合改变了传统制造模式的定义,数据已成为重要的生产资料之一,实时反应设备与制造各环节的状态,基于数据的附加价值则成为应用创新的落脚点,全方位支持柔性生产、优化设计、产品追溯、预防性维护和企业决策。
传感器身处制造现场的数据采集起点,检测识别方案的易用性、可靠性、高精度已经成为基础性要求,开放互联与智能化将成为下一阶段的竞争焦点,变革就住当下。
更务si彩比扫掩二维田22B现代制造•新自和化与呃和Industrial Manager | 工业经理人巴鲁夫(Balluff) 1921年成立于德国诺伊豪森, 从最初的自行车、缝纫机维修,到汽车零部件生产,再到传感器产品的生产制造,百年时光荏苒让巴鲁夫 经历了从机械到电气化的转型发展,如何顺应市场需求把握数字化时代的新机遇?日前,本刊记者对巴鲁 夫集团董事总经理Florian Hermle 先生进行了专访,力求明晰企业发展思路,探究巴鲁夫所倡导的“创新 自动化”的深刻内涵。
创新先锋铸就百年传奇回顾百年征程,技术创新是巴鲁夫发展的源动力。
1968感应式接近开关BES 投产:首款非接触式传感器是机械制造控制技术领域的一大进步,同时也令巴鲁 夫成为全球市场的领导者 之一。
1978光电式传感器BOS 投产:巴鲁夫传感器自此可远距离探测非金属材料目标。
1983由数据载体、读/写磁头和分析单元组合而成工业RFID 识别系统。
2006依靠工业网络和IO-Link 连接垂直扩展产品系列:巴鲁夫进一步发展成为系统与解决方案提供商,附件变为拥有高营业额的业务范畴。
一个个重要的里程碑时刻,众多创新产品成就了巴鲁夫的品牌价值。
巴鲁夫提供创新型传感器、工业识别及网络技术以及用于集成式系统解决方案的软件产品。
除诺伊豪森的总部外,巴鲁夫在全球不同 地区设有生产及研发基地,包含全球68个国家内的各 代表处及38家分公司,能向客户保证产品在全球范围内的快速供应,同时确保本地支持及服务的高标准。
Balluff BSW819机械式旋转凸轮开关

顶杆
调整螺钉
沉头螺钉
图 11: 更换开关元件并且调整开关元件(以 BSE 44 为例)的开关接通点至槽 口C
Changing the Drive Side
更换旋转凸轮开关的拖动侧至另外 一侧,将刻度环按在轴的另一端(图 12)。
注意:
– 主轴的旋转方向
– 以下调整步骤:
刻度环主视 图
旋转180°
1. 将旋转凸轮开关放在一个平面上
注意: 根据开关脉冲长度正确连接开 关元件!
设置举例 对应于左侧拖动、 向右旋转的凸轮开关 a) 对于脉冲长度 >180°: 设置槽口C到开关接通点位置 , 比如 0°. 设置槽口D到开关断开点位置, 比如 300°. a) 对于脉冲长度 <180°: 设置槽口A到开关接通点位置 , 比如 0°. 设置槽口B到开关断开点位置, 比如 90°.
注意如下规则: 总是看对应于主轴的旋转方向,角度值增加的刻度。(图 5).
图5: 看刻度环的哪一侧取决于主轴的旋转方向和拖动端
english
BSW 819-492, -493, -494 Mechanical Rotary Cam Switches
设置开关脉冲
根据开关脉冲长度,连接开关元件。 开关元件上面有如下的端子可供连 接: 开关元件 BSE 44.0 – 开关脉冲长度 >180°
Connections
危险! 开关工作时是带电的。 不要触摸,以防被电到。 在动开关元件之前,先切 断电源。更换或检测完开关元件 后,重新合上防护盖。
在凸轮开关外壳的3个面上开有M25 ×1.5的进线螺纹孔,以作电气连接 用。 根据开关脉冲长度(参见开关元件章 节及其电气参数)连接开关元件上的 接线端子。 通常情况下,使用保护接地端子将旋 转凸轮开关的外壳接地。
balluff接近限位开关

– 开关切换动作完成后 (推杆退动),达 到反向切换点,开关 复位。复位弹簧②将 推杆机构送回初始位 置。 – 脊 形 推 杆 的 角 度 是 120°。 – 楔形撞块和脊形推 杆之间的传动比是 2:1,即楔形撞块运 动2mm的行程(箭头 所指方向)与推杆 1mm的行程相对应。 为此,巴鲁夫楔形撞 块的操动斜面角为 26.5°。
基本位置
推杆到参考面的距离
开关切换点
释放位置
触头开关切换
常闭 常开 常闭 常开
辊形推杆 (R型) 仅46系列 – – – 推进速度 V最大 = 60 m/s 重复精度 ±0.05 mm 长楔形撞块
预行程
从基本位置到开关切换点的运 动距离
超行程
在持久应用中推杆达到切换点 后还允许运动的最大距离
定义 100系列新产品 61系列新产品 46系列新产品 用于槽板的撞块 铝制槽板 微动开关 安装说明
机电式限位开关
定义
原理 – 推杆①由控制楔形撞 块在其运动轴向推 动。 – 在预行程阶段,复位 弹簧②是受压的。 – 预行程阶段完成时, 伸缩自如的推杆机 构的开关销③触动微 动开关,到达规定的 开关点实现开关的切 换。销钉③的预行程 范围受导向架④限 制。此精密设定且伸 缩自如的弹簧系统避 免了操动系统发生堵 塞。
滚珠轴承推杆 (L型) 开关切换点 推杆至定义参考面的校正距离 – – – 推进速度 V最大 = 120 m/s 重复精度 ±0.05 mm 长楔形撞块
释放点
触头返回切换到正常接触位置 时推杆的位置
滞后
开关切换点至释放位置的距离
重复精度
持续保持开关切换点位置不变 的能力
Байду номын сангаас
机电式限位开关
巴鲁夫balluff传感器的工作原理

巴鲁夫balluff传感器的工作原理巴鲁夫(Balluff)传感器是一种常见的工业自动化设备,广泛应用于制造业、物流、机械加工等领域。
它的工作原理是基于物理量的测量和转换,实现对环境变化的感知和反馈。
巴鲁夫传感器的工作原理可以分为三个主要步骤:感知、转换和输出。
首先是感知阶段。
巴鲁夫传感器通过感知周围环境的物理量来实现对环境的感知。
常见的物理量包括温度、压力、光线、颜色、位置等。
巴鲁夫传感器通过内部的感知元件(如光敏元件、压力传感器、温度传感器等)来收集这些物理量的信息。
感知元件将环境中的物理量转化为电信号,传递给巴鲁夫传感器的控制电路。
接下来是转换阶段。
巴鲁夫传感器的控制电路会对收集到的电信号进行处理和转换。
首先,它会对电信号进行放大和滤波,以提高信号的稳定性和可靠性。
然后,根据传感器的类型和应用需求,控制电路会将电信号转换为数字信号或模拟信号。
这个过程一般通过模数转换器(ADC)或数字信号处理器(DSP)实现。
转换后的信号可以更方便地进行处理和分析。
最后是输出阶段。
巴鲁夫传感器的输出方式多种多样,常见的有数字信号输出、模拟信号输出和开关量输出。
数字信号输出一般是通过串行通信接口(如RS485、CAN等)将数据传输给控制系统。
模拟信号输出一般是通过模拟电压或电流的方式将信号传递给控制系统。
开关量输出一般是通过开关接点来实现,可以直接控制外部设备的开关状态。
除了这三个主要步骤,巴鲁夫传感器还具有一些特殊的功能和特点。
例如,巴鲁夫传感器可以具有自我诊断功能,能够监测自身的工作状态和故障情况,并及时报警。
巴鲁夫传感器的工作温度范围一般较广,可以适应各种恶劣的工作环境。
此外,巴鲁夫传感器还可以具有防护等级,以保护传感器免受尘埃、水分、冲击等外部环境的影响。
总体来说,巴鲁夫传感器的工作原理是基于物理量的测量和转换。
通过感知环境中的物理量,将其转换为电信号,并通过控制电路对其进行处理和转换,最终输出给控制系统。
巴鲁夫位移传感器BTL6-A110说明书,BALLUFF(巴鲁夫)成立
巴鲁夫位移传感器BTL6-A110说明书,BALLUFF(巴鲁夫)成立于1921年,是一个世界著名的传感器制造商‘BALLUFF提供创新和实际感测解决方案,为汽车行业、冶金行业、机床行业、风电行业提供广泛的应用和产业巴鲁夫BTL6-A110-M0050-A1-S115的技术参数结构型号系列,型面结构接口模拟接口,电压接口插接器, M12工作电压 20.0...28.0 V分辨率≤ 10 µm许可/一致性 CEcURus用于动态规则应用 No产品组别微脉冲位移传感器代数 Generation 6反极性保护最高36 V防护等级符合IEC 60529 IP67 (带插接器)许可/一致性 CE,cURus,巴鲁夫位移传感器BTL6-A110说明书BALLUFF位移传感器又称为线性传感器,它分为BALLUFF电感式位移传感器,BALLUFF电容式位移传感器,BALLUFF光电式位移传感器,BALLUFF位移传感器超声波式位移传感器,霍尔式位移传感器。
BALLUFF电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰减量的变化来完成无接触检测物体的目的。
德国巴鲁夫BALLUFF主营产品:德国BALLUFF编码器、BALLUFF传感器、BALLUFF 接近开关、BALLUFF光电开关、BALLUFF极限开关、BALLUFF限位开关、BALLUFF 位移传感器、BALLUFF连接器、BALLUFF磁环、BALLUFF发射器、BALLUFF接收器、BALLUFF位置开关、BALLUFF执行器、BALLUFF电子凸轮、BALLUFF位置开关、BALLUFF磁敏开关、BALLUFF电子识别系统BALLUFF编码器、接口。
BALLUFF编码器包括:BAW系列、BCS系列、BES系列、BFO系列、BGL系列、BHS系列、BIL 系列、BKS系列、BLE系列、BLS系列、BLT系列、BMF系列、BOS系列、BPN系列、BWL等,德国BALLUFF编码器、BALLUFF传感器、BALLUFF接近开关、BALLUFF 光电开关、BALLUFF极限开关、BALLUFF限位开关、BALLUFF位移传感器、BALLUFF 连接器、BALLUFF磁环、BALLUFF发射器、BALLUFF接收器、BALLUFF位置开关、BALLUFF执行器、BALLUFF电子凸轮、BALLUFF位置开关、BALLUFF磁敏开关、BALLUFF电子识别系统巴鲁夫位移传感器BTL6-A110说明书。
巴鲁夫BALLUFF传感器的工作原理_4
巴鲁夫BALLUFF传感器的工作原理一、BALLUFF巴鲁夫公司简介Balluff(巴鲁夫)成立于1921年,至今快成立一百周年了,是传感器制造商。
Balluff为汽车,冶金,机床和风力发电行业的广泛应用和行业提供创新和实用的传感解决方案。
总部位于德国斯图加特,挪因豪森,在自动化行业,能源行业中增长率最高,之一是德国、美国、瑞典、巴西、匈牙利、德国有生产基地。
市场遍及全球,专注于本地化和全球化的共同发展。
Balluff产品包括:BNS完整的电子和机电行程开关系列,BOS光电开关,BES感应接近开关,电容式开关,BMF磁性开关,BTL线性位移传感器,RFID识别系统以及各种连接器等待。
在广泛的工业应用领域,特别是在机械设备领域,为用户提供了创新且经验丰富的传感器应用。
Balluff巴鲁夫是电气领域的中型公司。
超过1,000名员工从事各种电子和机电传感器,位移传感器和识别系统的生产和销售。
合理的价格,完善的服务和遍布全球的分销网络。
该产品已成功应用于许多自动化领域。
Balluff巴鲁夫是定位控制组件。
巴鲁夫作为一家中型企业,成立于毗邻斯图加特市的诺伊豪森,经过家族四代人的经营,已发展成为面向全球的跨国集团。
企业富有悠久传统,多年来建立了良好的客户关系,同时也是客户眼中重要的创新合作伙伴与市场先驱。
他们为客户提供他们真正需要的:所有自动化领域的高品质传感器、识别、网络解决方案及整体系统软件解决方案。
二、巴鲁夫BALLUFF电容式传感器产品种类及产品介绍1、用于目标检测的电容式传感器①直径自6.5 mm起的紧凑型结构②扁平结构,例如开关距离达25 mm的片状结构③齐平安装④塑料和不锈钢规格⑤可提供价格低廉的规格⑥可通过电位计或电缆示教调节⑦插头和电缆类型⑧可选择带IO-Link2、不接触介质的电容式液位传感器①泡沫和残留物补偿②耐压规格③插头和电缆类型④可提供价格低廉的规格⑤可选择带IO-Link3、放大器用的电容式传感器头①适合集成电子装置的传感器无法运行的环境②适合温度或超高压力③结构紧凑,特别适合狭小空间④传感器头通过独立的放大器驱动4、巴鲁夫BALLUFF电容式传感器产品种类有哪些①巴鲁夫BALLUFF用于目标检测的电容式传感器②巴鲁夫BALLUFF不接触介质的电容式液位传感器③巴鲁夫BALLUFF接触介质的电容式液位传感器④巴鲁夫BALLUFF放大器用的电容式传感器头⑤巴鲁夫BALLUFF电容式传感器头的放大器⑥巴鲁夫BALLUFF带有特殊属性的电容式传感器三、巴鲁夫balluff电容式传感器特点优势,优点。
巴鲁夫 工业 RFID系统 产品手册说明书

Industrial RFID systems MANAGING ALL YOUR DATABalluff offers you a wide selection of data carriers and read/write heads for LF, HF and UHF applications. With the BIS V multi-frequency processor unit, all systems can be combined with each other. This adds flexibility and saves costs through lower inventory levels.Industrial RFID systems – managing all your dataAutomatic identification and tracking in productionTHE PERFORMANCE RANGEYour Balluff solutionsn HF RFID system (13.56 MHz) BIS M n LF RFID system (70/455 kHz) BIS C n LF RFID system (125 kHz) BIS L n UHF RFID system (860/960 MHz) BIS UGo online to individually configure your own system www.balluff.de/go/rfid-configuratorIO-LINK ALL-IN-ONE BIS V PROCESSOR UNIT1 Network block2 Read/write heads with IO-Link3 Data carriers4 Read/write heads with integrated processor unit5 Universal processor unit6 Read/write heads2266433315UHF by country-specific frequencies1 South Korea LF: 125 kHz HF: 13.56 MHzUHF: 917...920.8 MHz 2 JapanLF: 125 kHz HF: 13.56 MHzUHF: 916.7...920.8 MHz 3 ChinaLF: 125 kHz HF: 13.56 MHzUHF: 840.5...844.5 MHz 4 AustraliaLF: 125 kHz HF: 13.56 MHz UHF: 920...926 MHz5 South Africa LF: 125 kHz HF: 13.56 MHzUHF: 865.6...867.6 MHz 6 EuropeLF: 125 kHz HF: 13.56 MHzUHF: 865.6...867.6 MHz 7 USA/Canada/Mexico LF: 125 kHz HF: 13.56 MHz UHF: 902...928 MHz 8 BrazilLF: 125 kHz HF: 13.56 MHzUHF: 902...907.5 MHzWHAT ARE THECONSEQUENCES OF THE DIFFERENT FREQUENCIES?Briefly stated, different frequencies mean different working ranges, since the frequency determines the range. The frequency also affects the coupling behavior (see: How the system components communicate).LF is best suited for close range and for difficult conditions such as metallic surroundings. LF is therefore often used in tool identification.HF is ideal for parts tracking at close range up to 400 mm. With HF you can process and store larger quantities of data at high transmission speeds.UHF typically communicates at a range of 6 m distance. UHF allows simultaneous reading of multiple data carriers (multi-tagging).System frequenciesWorking range of the Balluff BIS RFID systemsSYSTEM STRUCTURERFID requires three main components. These form an RFID system:–■Data carrier (data storage)–■Read/write head (data transmission)–■Processor unit (data processing and communication)The system components in detail–■Data carrier (Tag/Data Carrier)Stores all kinds of data which is read or written by computers or automation equipment. The data carrier antenna sends and receives the signals. Read/write versions are available in various memory capacities and with various storage mechanisms.– Passive data carriers: without power supply – Active data carriers: with power supply–■Read/write headProvides power to the data carrier, reads its data and writes new data to it. It sends this data to the processor unit where the data is further processed. –■AntennaTransmits the power.– HF-/LF systems: Antenna is integrated in the read/write head– UHF systems: Usually passive antennas without read/write head electronics (integrated into the processor unit).–■Processor unitUsed for signal processing and preparation. It typically includes an integrated interface for connecting to the controller/PC system.UHF system: The read/write function can be integrated into the processor unit, so that only a passive antenna and the data carrier are required.How the system components communicateThe data carrier and read/write head connect via the frequency-dependent coupling.With UHF the coupling is via electromagnetic waves, and for LF and HF the coupling is inductive.Components of a HF/LF systemData carrier Read/write head Processor unitUsed at close range, the data carrier must be placed exactly within the read range of the read/write head.Components of a UHF systemData carrier Antenna withProcessor unitread/write head electronicsData carrier Passive antennaProcessor unit withread/write head electronicsIn UHF systems close placement of the data carrier in front of the antenna is not necessary because of the large working range. Still, there are a few rules (see: What to know about UHF systems).Various industry standards are in place both for theLF/HF range and for UHF for communication between the system components. These specify how the information is transmitted. There are also proprietary manufacturer-specific solutions available (see: What you need to know about LF/HF systems/UHF systems).SYSTEM CHARACTERISTICSWhy data storage is importantSelection of the data storage determines where data can be processed and with which components. You can use either of two storage concepts: the central database and decentralized data retention.Central data storage–■All data records are stored in a central database –■Data carrier is simply an identifier –■Mainly for reading informationCan be LF, HF or UHF systems, but mainly used with UHF systemsDecentralized data retention–■All data records are stored on data carriers –■The data carrier stores the identifier and all data records (no central database)–■For both reading and writing informationMainly used with HF/LF systemsWHAT YOU NEED TO KNOW ABOUT LF/HF SYSTEMSIn brief, the read/write distance in LF/HF systems is affected by the antenna shape and the traverse speed.When installing the data carriers the installation conditions and close proximity of metal play a role.Antenna shapeData carriers and read/write heads are constructedwith a rod or round antenna. To achieve the best results the antenna shape must be identical to that of the read/write head. This means: Use rod antenna with rod antenna or round antenna with round antenna.The antenna shape determines different field distributions and read distances. It also determines the active communication field.Ideal working rangeRound antenna–■The lobe of the antenna field is distributed evenly and symmetrically–■No polarization or directionality, even offset.This means the data carrier and read/write head Rod antenna–■The lobe of the antenna field is distributed unevenly and has additional sidelobes–■The is polarization and directionality, which allows greater read distances than with a round antenna–■Identical orientation of the data carrier and read/write head is important in order to achieve greater read distancesInstalling data carriersAccount for distance to metalTo reach the specified read/write distance, a data carrier in a metallic environment must be mounted at a certain distance from metal and within a certain metal-free clear zone. The exact specifications can be found in the data sheets. The following distinctions are made:–■Flush in metalThe sensing surface can be mounted flush on the surface of steel so that it is even with adjacent areas. The range here is less than for differently constructed/installed data carriers of the same size.–■On metalThe sensing surface must not be in contact or surrounded by steel.–■Metal-free (clear zone)The entire area of the data carrier must be kept clear of any type of metal.12365874Data carriers with various memory types are available Traditional memory chips are EEPROM and FRAM.Both types use inductive coupling for power supply and data transmission. They differ in the maximum number of write cycles.–■EEPROM (Electrical erasable programmableread only memory): 100,000 to 1,000,000 write cycles –■FRAM (Ferro-electrical random access memory): 1010 write cyclesHow traverse speed, read/write distance and data transmission time relate to each otherFor reliable data transfer between read/write head andDynamic read/write modeThe data carrier passes by the read/write head without stopping. This should be as close as possible to achieve a long read/write path.How to calculate the traverse speed for dynamic applications Traverse speed (v)Offset (s)=At least 315 mm of offset is required to read the data within a dwell time of 45 ms. Assuming the maximum offset is 340 mm, the read distance must be configured to be very short. The greater the offset of the read/write head, the greater the distance between data carrier and read/write head can be.Important industry standards–■ISO 15693International series of standards for non-contacting chip cards, identification systems and access controls. Operates at a frequency of 13.56 MHz and is the prevailing standard in automation.ISO 15693 defines the protocols for communication between data carrier and read/write head. The datacarriers and read/write heads from different suppliers are generally compatible if they adhere to the same standard. –■ISO 14443International series of standards for non-contact chipcards. These are used in identification systems and access controlling, but also for payment applications such as credit cards, public transportation tickets, etc. Operates at a frequency of 13.56 MHz.In contrast to the ISO 15693 standard, ISO 14443specifies that the data carrier and read/write head carry a manufacturer-specific identifier. Only if the identifiers agree can they communicate with each other.Balluff uses the most commonly accepted contactless chip technology NXP Mifare. This complies with ISO-Standards ISO 7816 and ISO 14443A.High performance solutions from BalluffIn addition to the industry standards there are proprietary systems that are not described by any standard. For example, high-performance solutions from Balluff that are faster and process more data than these industry standards allow. Here the following components are used:–■High-memory data carriers: Data carriers with a memory capacity > 8 kilobytes.–■High-speed data carriers: Combined with the associated read/write heads you can achieve up to eight times greater read speeds than applications that fall under DIN ISO 15693.WHAT YOU NEED TO KNOW ABOUT UHF SYSTEMSPower transmission between data carrier and read/write head is essential for optimal function of a UHF RFID system. Whether and how the antennas need to be aligned with each other depends on the type of polarization of the antennas.Relationship between antenna polarization and data carrier orientationThe polarization of a UHF antenna is determined by the direction of the electrical field of the wave.–■Linear polarized antennasThe electrical field runs either vertical or horizontal to be identically aligned in order to transmit power.–■Data carrier antennaIn UHF systems the coupling is electromagnetic. To transmit data the data carrier‘s antenna converts electromagnetic waves and high-frequency alternating current into each other. Here the polarization direction of the sending antenna and the orientation of the data carrier must be selected correctly. (See illustration for how to achieve optimal power transmission).Construction of a UHF data carrierUHF data carriers with a dipole antenna are often selected (see illustration above). Many other antenna shapes are available as well. These offer particular properties and determine the form factor of the data carrier.Other form factors for UHF data carriersTypical UHF industry standards–■ISO/IEC 18000-6:2013International series of standards that provide the general description of the air interface and signal transmission. The latest standard ISO 18000-63 was published in 2015.–■EPC Class1 Gen2Was published by the standardization organization EPC global, which develops voluntary standards. EPC Class 1 Gen2 Version 2.0.1 is fully compatible with ISO 18000-63.This compatibility mans you can use the same hardware infrastructure and the same data carriers both in an ISO standard environment and an EPC environment.Both standards are suitable for worldwide use. You must however take note of the various national RF regulations.UHF antenna field requires specific test scenariosIn brief: Since the surroundings affect the antenna field, you must perform the closest possible simulation of the ambient conditions.The UHF antenna beams its signal in a wide opening angle. Undesired reflections and absorption in a UHF RFID system Typical ideal antenna fieldin overlapping of wavetrains. Overall it can result in local fields with higher and lower field strengths, or even field collapses (read holes).If a data carrier finds itself in such a read hole, it can no longer communicate with the read/write head.Headquarters Balluff GmbHSchurwaldstrasse 973765 Neuhausen a. d. F.GermanyPhone +49 7158 173-0Fax +49 7158 5010******************D o c . n o . 949747E N · I 20 · S u b j e c t t o c h a n g e s .CONTACT OUR WORLDWIDE SUBSIDIARIES。
巴鲁夫BALLUFF行程开关819系列资料

巴鲁夫BALLUFF行程开关819系列资料下载BALLUFF巴鲁夫行程开关原厂技术资料,内附高清实物图!德国巴鲁夫公司BALLUFF GmbH)成立于1921年,在广阔的工业应用领域,尤其是机械装备领域为用户提供创新的、有经验的传感器运用方案。
是世界范围内首屈一指的传感器制造商,产品包括了一个完整的电子式和机电式行程开关系列、光电开关、感应式接近开关、电容开关、直线位移传感器,RFID识别系统,以及各种插接件产品。
【产品名称】:德国BALLUFF行程开关【原产地】: 德国【品牌】:德国巴鲁夫【产品型号】:★BNS819-B02-D12-61-12-3B两联【产品说明】★行程开关根据其用途的不同,可以分为两联,三联,四联,多联等等。
★我公司主要的产品是两联行程开关,一般应用于相对值的数控机床系列,用来反馈机床工作台的加工区域。
【特点说明】:★双向引线,出线方便★合金镍钢头,耐磨损★外表度碳钢,不生锈★加防油垫,不进油★触点感应精度高【详细说明】1.行程开关根据其用途的不同,可以分为两联,三联,四联,多联等等。
我公司主要的产品是两联行程开关,一般应用于相对值的数控机床系列,用来反馈机床工作台的加工区域。
2.打开其后盖,会看见两组接线端子排(6个端子),一个接地端子3.松开两头的接线封口蓝色螺丝帽(M20),就可以根据需要进行接线,线接好后,一定要把没有用到的那头螺丝帽(M20)以及后盖拧紧,以防止有异物进入,缩短使用寿命。
原装BALLUFF巴鲁夫行程开关型号列举BNS819-X512-B04-R08-46-13-FCBNS819-X512-B04-R08-46-13BNS819-X512-B04-R08-40-13BNS819-X512-B04-E12-61-12-10BNS819-X512-B04-D08-40-13BNS819-X512-B03-E08-40-13BNS819-X512-B03-D08-40-11BNS819-X512-B02-K08-40-12-FCBNS819-X512-B02-E12-61-24-10BNS819-X512-B02-D08-40-13BNS819-X512-B02-D08-40-11BNS819-X512-99-R-12-S4BNS819-X512-99-E-13BNS819-X512-100-R-12-S4BNS819-X512-100-R-10BNS819-X512-100-K-13BNS819-X512-100-E-13BNS819-X512-100-D-13-S4BNS819-X512-100-D-12-S4BNS819-X512-100-D-10BNS819-X511-99-D-10-S4BNS819-X510-99-R-10BNS819-X505-99-R-10BNS819-X505-99-K-10BNS819-X505-99-D-10BNS819-X499-100-R-11BNS819-X497-99-R-10BNS819-X497-99-K-10BNS819-X497-99-D-10BNS819-X496-99-R-11BNS819-X496-99-R-10BNS819-X496-99-P-11BNS819-X496-99-P-10BNS819-X495-B02-D16-72-10 BNS819-X492-D08-L12-100-10-FD BNS819-X492-D06-L12-100-10-FD BNS819-X492-D04-L12-100-10-FD BNS819-X481-B03-D08-40-11 BNS819-X481-B02-D08-40-11 BNS819-X481-99-R-10BNS819-X481-99-K-10BNS819-X481-99-D-10BNS819-X428-D04-D12-100-10。
BALLUFF 微脉冲位移传感器 说明书

– 处理卡的结构为欧洲插 卡规格,可用于19"组 件插座和插卡座/凸导 轨。
– 位置数据的刷新频率最 大为2 KHz。这样,即便 很快的运动速度,处理 卡都能捕捉到当前的位 置,滞后错误可基本忽 略。
– 微处理器的数字量化控 制,带来了非常高的分 辨率(小至 0.01 mm)。
– 可选择并行数据格式的 二进制码,格雷码和 BCD码。
接口: – InterBus – PROFIBUS-DP – CANopen – DeviceNet – Ethernet TCP/IP – MODBUS – CC-Link
分辨率:1 µm 定位磁块配置 (1...4)
更多技术详情及订货:
WAGO Kontakttechnik GmbH Hansastraße 27 32423 Minden 电话: +49/571/887-0 传真: +49/571/887-169 E-Mail: info@
– 绝缘的DIN面板安装外壳 (包含安装件)
– 8个可编程输出 – 可带8个方向开关点 – 14 mm长7段红色LED数码管显
示,6位显示 – 面板上LED开关位置显示 – 300 个开关点可分配给多达15个
程序
– 零点偏移调整 – 静态和动态开关点均带有空转时
间补偿
– 多个BDD-CC 08可并联 – 内置传感器供电电源300 mA, 24 V – 绝缘的DIN面板安装外壳
74 g
最大冲击加速度
200 g
210 g
最大正弦速度
2.0 m/s 1.9 m/s
最大冲击速度
5.1 m/s
3.5 m/s
最大振幅
51 mmp-p
0...20 mA, 20...0 mA
德国BALLUFF位移传感器

德国BALLUFF位移传感器信息参考来源:广州兰瑟电子科技德国BALLUFF位移传感器分类:BNS完整电子式、机电式行程开关系列、BOS光电开关、BES感应式接近开关、电容开关、BMF磁敏开关,BTL直线位移传感器,RFID识别系统,插接件等。
德国BALLUFF位移传感器型号描述:巴鲁夫(BALLUFF)电感式接近传感器BES 113-356-SA6-S4巴鲁夫(BALLUFF)电感式接近传感器BES 516-300-S 135-S 4-D 巴鲁夫(BALLUFF)电感式接近传感器BES M08MI-PSC20B-BV03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-05 巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-03巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-05巴鲁夫(BALLUFF)电感式接近传感器BESM08EC-PSC15B-S49G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PSC20B-S04G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PS0B-S04G巴鲁夫(BALLUFF)位移传感器BAW G06EE-UAF20B-EP03-K巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP015-GS04巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP03巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP05巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD25F-BP-03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP002-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP015-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP03巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP05巴鲁夫(BALLUFF)位移传感器BAW M12MI-UAC20B-S04G巴鲁夫(BALLUFF)位移传感器BAWM08EI-UAD15B-BP002-GS04 巴鲁夫(BALLUFF)电容式接近传感器BCS 010-PSB-1-L-P02巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PS-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S 4巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S4巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-NSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-PSC24G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-NSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-PSC18G-A V02巴鲁夫(BALLUFF)电容式接近传感器BCS-20GM10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BOS-18M-PA-1PD-E5-C-S4,巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B-03巴鲁夫(BALLUFF)微型断路器BES 516-114-S4-C 10-30V巴鲁夫(BALLUFF)微型断路器BES113-356-SA6-S4巴鲁夫(BALLUFF)微型断路器BES113356SA6-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S135-S4-D巴鲁夫(BALLUFF)微型断路器BES516-347-M0-C-03巴鲁夫(BALLUFF)微型断路器BES517-140-P5-H巴鲁夫(BALLUFF)微型断路器BESM12MI-PSC20B-S04G巴鲁夫(BALLUFF)微型断路器BESM12MI-PS0B-S04G巴鲁夫(BALLUFF)微型断路器BKS-S33M-00?巴鲁夫(BALLUFF)微型断路器BOS15K-S-E1-P-S75巴鲁夫(BALLUFF)微型断路器BRGB3-W AB12EP-P-R-K-SA8-0.3 巴鲁夫(BALLUFF)微型断路器BRGC5-W AP360-0P-G-0-SR巴鲁夫(BALLUFF)微型断路器BTL5-E10-M2000-B-S32巴鲁夫(BALLUFF)微型断路器BTL5-S173-M0206-P-S32巴鲁夫(BALLUFF)微型断路器dks-s20-2-05巴鲁夫(BALLUFF)微型断路器BES516-3005-E4-C-PU-05巴鲁夫(BALLUFF)微型断路器BES113-356-SA31-S4巴鲁夫(BALLUFF)微型断路器BES516-300-S-135-S4-D 36V巴鲁夫(BALLUFF)微型断路器BES516-3021-G-E4-C-PU-02巴鲁夫(BALLUFF)微型断路器BES516-3022-G-E5巴鲁夫(BALLUFF)微型断路器BES516-325-G-S4-C巴鲁夫(BALLUFF)微型断路器BES516-325-S4-C巴鲁夫(BALLUFF)微型断路器BES516-362-S4-CW巴鲁夫(BALLUFF)微型断路器BES516-371-SA10-S4-003巴鲁夫(BALLUFF)传感器控制器BKS-S32M-C-00巴鲁夫(BALLUFF)电感式接近传感器BTL5-S173-M0350-B-S32 巴鲁夫(BALLUFF)电感式接近传感器BTL-P-1012-4R巴鲁夫(BALLUFF)光电开关BOS18M-PS-1XB-E5-C-S4巴鲁夫(BALLUFF)电感式接近传感器BRGB3-W AB12-EP-P-R-K-SA8-03。
BALLUFF直线位移传感器选型手册
系列
冲击负载 振动 极性反接保护 过电压保护 绝缘强度 外壳防护等级 符合 IEC 60529 外壳材料 安装方式 10.2 mm 不锈钢管耐压强度 8 mm 不锈钢管耐压强度 连接方式 电磁兼容性测试: 无线电放射干扰 (RF) 静电干扰 (ESD) 电磁场干扰 (RFI) 瞬间高速干扰脉冲 (BURST) 因高频场感应干扰引起的 线路噪声 标准额定检测长度 [mm] 直径8 mm金属管 检测长度至1016 mm
微脉冲位移 传感器
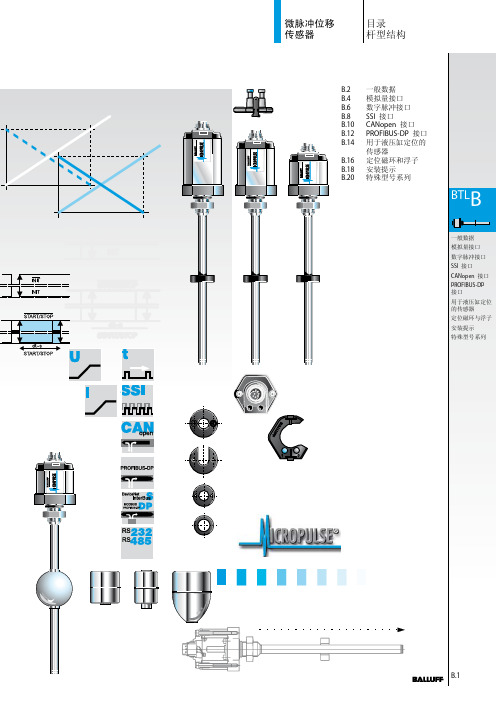
BTL5 杆型结构
一般数据 杆型结构
额定检测长度=检测区域 磁环
衰减区 (无效区)
螺纹 M18x1.5 安装面
额定检测长度=检测区域 磁环
螺孔 M4×4/6 深
衰减区 (无效区)
螺纹 3/4"x16 UNF 安装面
额定检测长度=检测区域
螺孔 M4×4/6 深
标准订货中包含 – 位移传感器 (从B.4 开始选取您所需的接口) – 简明用户手册
另请单独订购:
定位磁环 见 B.16 安装螺帽 见 B.16 浮子 见 B.17 插头 见 BKS.3
B.
系列
外壳 B BTL5_ _ _ _ -B-_ _ _ _ 公制安装螺纹 M18×1.5
B = 标准外壳
外壳 Z BTL5_ _ _ _ -Z-_ _ _ _ 3/4" UNF 安装螺纹
外壳 B8 BTL5_ _ _ _ -B8-_ _ _ _ 公制安装螺纹 M18×1.5 8 mm 直径金属杆 最大额定检测长度 1016 mm
外壳 Z8 BTL5_ _ _ _ -Z8-_ _ _ _ 3/4" UNF 安装螺纹 8 mm 直径金属杆 最大1016 mm 额定检测长度
BALLUF传感器(微脉冲位移传感器)_图文.
目录杆型结构微脉冲位移传感器接口系列冲击负载振动极性反接保护过电压保护绝缘强度外壳防护等级符合 IEC 60529外壳材料安装方式 0.2 mm 不锈钢管耐压强度8 mm 不锈钢管耐压强度连接方式电磁兼容性测试:无线电放射干扰 (RF静电干扰 (ESD电磁场干扰 (RFI瞬间高速干扰脉冲 (BURST因高频场感应干扰引起的线路噪声标准额定检测长度 [mm]直径8 mm 金属管检测长度至0 6 mm 一般数据杆型结构微脉冲位移传感器耐高压达 600 bar ,重复精度高非接触,坚固耐用BTL 微脉冲位移传感器是在严酷环境中经久耐用的位置反馈系统,检测范围从25到5500 mm 。
传感器的检测波导管安装在耐高压的不锈钢金属管中受到可靠的保护。
本系统非常适合于液压缸中的位置反馈或在食品化工领域中用于腐蚀性液体的液位控制。
标准订货中包含–位移传感器 (从B.4 开始选取您所需的接口–简明用户手册另请单独订购:定位磁环见 B. 6安装螺帽见 B. 6浮子见 B. 7插头见BKS.3B.2BTL5 杆型结构 00 g/6 ms 符合 IEC 60068-2-272 g, 0...2000 Hz 符合 IEC 60068-2-6有Transzorb 保护二极管500 V DC (外壳对地IP 67 (与防护等级为IP 67 的BKS-S...插头可靠连接时铝,经阳极氧化处理/ .457 不锈钢保护管, .3952 不锈钢精密铸造法兰盘外壳 B ,螺纹M 8× .5 ;外壳 Z , 3/4"-6UNF600 bar ,安装在液压缸中250 bar ,安装在液压缸中插头或电缆连接EN 550 第组,A 级IEC 6 000-4-2 ,锐度 3IEC 6 000-4-3 ,锐度 3IEC 6 000-4-4 ,锐度 4IEC 6 000-4-6 ,锐度 30025, 0050, 0075, 0 00, 0 25, 0 50, 0 75, 0200, 0225, 0250, 0275, 0300, 0325, 0350, 0375, 0400, 0425, 0450, 0475, 0500, 0550, 0600, 0650, 0700, 0750, 0800, 0850, 0900, 0950, 000, 00, 200, 300, 400, 500, 600, 700, 800, 900, 2000, 2250, 2500, 2750, 3000, 3250, 3500, 3750, 3850, 4000 或者以5 mm 步进订货,直至5500 mm (取决于步数系列BTL5杆型结构微脉冲位移传感器一般数据杆型结构模拟量接口杆型结构微脉冲位移传感器B.4标准订货中包含:–位移传感器–调节装置–简明用户手册另请单独订购:定位磁环见 B. 6安装螺帽见 B. 6 插头从BKS.3起00 % 量程范围内零点终点调节模拟信号的零点和终点可通过按压按键来调节。
巴鲁夫BTLI微脉冲位置传感器

K.H.1
Ex.4
Ex.6
Ex.8
i.3
巴鲁夫微脉冲直线位移传感 器是在严酷环境中应用的理 想选择。检测长度从25mm到 5500mm。
有多种输出信号形式可供选 择以匹配您的专用控制器。
此外,我们还提供带有多种 可编程功能的处理卡,为您 的控制器提供数字或模拟数 据信号。
滞后是到达并超过某一位 置,又以反方向从其他位置 返回该位置时所引起的信号 差异。
线性度
关断点
检测元件的线性度是一条线 性特征曲线。当输入值与输 出值之间的关系为一条直线 (一次函数)时,检测元件 的灵敏度恒定。线性范围在 X-Y轴平面内假定。当特征 曲线不是一条直线时为非线 性的。 非线性 非线性是围绕连接检测范围 的零点与终点的直线的最大 偏差量。 在位置(或检测点)与电 压、电流或数字量等输出信 号之间存在线性关系。磁致 伸缩传感器的线性度曲线在 系统使用寿命内保持不变, 并且,曲线能够被校正。
如果电路本身不产生会引燃 IIA, IIB 或IIC 组(测试环境满 足标准)爆炸环境的火花或 热效应,那么该电路被认为 是本质安全的。测试环境考 虑到正常的操作过程和某些 故障环境。 为了满足本质安全要求,对 电子和电气组件均有特定的 限制。 此外,相比普通的工业应 用,这里所使用的负载必须 减小: – 考虑到电压会影响绝缘常
i.5
装有微脉冲位 移传感器的液压缸
注塑机
挖掘机
i.6
切纸机
清洗机 装有微脉冲位 移传感器的液压缸
在危险环境中的定位 风力发电机
微脉冲位移传感器 应用
i
应用
巴鲁夫微脉冲位移传感器具 有在各种自动化和控制技术 领域应用的特点,甚至是在 极端恶劣的环境中。
BALLUFF巴鲁夫传感器的特点
BALLUFF巴鲁夫传感器的特点德国BALLUFF巴鲁夫传感器工作原理特点BALLUIFF巴鲁夫传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。
BALLUFF巴鲁夫传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。
它是实现自动检测和自动控制的首要环节。
BALLUFF巴鲁夫传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。
通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等类。
德国ba11uf巴鲁夫光电传感器是采用光电元件作为检测元件的传感器。
它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。
光电传感器一般由光源、光学通路和光电元件三部分组成。
光电检测方法具有精度高、反应快、非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此光电式传感器在检测和控制中应用非常广泛。
BALLUFF位移传感器又称为线性传感器,它分为电感式位移传感器,电容式位移传感器,光电式位移传感器,位移传感器超声波式位移传感器,霍尔式位移传感器。
电感式位移传感器是一种属于金属感应的线性器件,接通电源后,在开关的感应面将产生一个交变磁场,当金属物体接近此感应面时,金属中则产生涡流而吸取了振荡器的能量,使振荡器输出幅度线性衰减,然后根据衰诚量的变化来完成无接触检测物体的目的。
BALLUFF巴鲁大传感器光敏二极管是常见的光传感器。
光敏二极管的外型与一般二极管一样,只是它的管壳上开有一个嵌着玻璃的窗口,以便于光线射入,为增加受光面积,PN结的面积做得较大,光敏二极管工作在反向偏置的工作状态下,并与负载电阻相串联,当无光照时,它与普通二极管一样,反向电流很小(<?A),称为光敏二极管的暗电流,当有光照时,载流子被激发,产生电子-空穴,称为光电载流子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
德国BALLUFF(巴鲁夫)
信息来源:广州兰瑟电子科技公司
德国BALLUFF(巴鲁夫)分类:BNS完整电子式、机电式行程开关系列、BOS光电开关、BES感应式接近开关、电容开关、BMF磁敏开关,BTL直线位移传感器,RFID识别系统,各种插接件等。
德国BALLUFF(巴鲁夫)型号及描述:
巴鲁夫(BALLUFF)电感式接近传感器BES 113-356-SA6-S4
巴鲁夫(BALLUFF)电感式接近传感器BES 516-300-S 135-S 4-D 巴鲁夫(BALLUFF)电感式接近传感器BES M08MI-PSC20B-BV03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-03 巴鲁夫(BALLUFF)电感式接近传感器BES113-356-SA6-PU-05 巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-03
巴鲁夫(BALLUFF)电感式接近传感器BES516-329-14-C-05
巴鲁夫(BALLUFF)电感式接近传感器BESM08EC-PSC15B-S49G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PSC20B-S04G 巴鲁夫(BALLUFF)电感式接近传感器BESM12I-PS0B-S04G
巴鲁夫(BALLUFF)位移传感器BAW G06EE-UAF20B-EP03-K
巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP015-GS04
巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP03
巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD15B-BP05
巴鲁夫(BALLUFF)位移传感器BAW M08EI-UAD25F-BP-03
巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP002-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP015-GS04 巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP03
巴鲁夫(BALLUFF)位移传感器BAW M12MF2-UA0F-BP05
巴鲁夫(BALLUFF)位移传感器BAW M12MI-UAC20B-S04G
巴鲁夫(BALLUFF)位移传感器BAWM08EI-UAD15B-BP002-GS04 巴鲁夫(BALLUFF)电容式接近传感器BCS 010-PSB-1-L-P02
巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PS-1-L-S 4
巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S 4
巴鲁夫(BALLUFF)电容式接近传感器BCS 012-PSB-1-L-S4
巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-NSC24G-A V02
巴鲁夫(BALLUFF)电容式接近传感器BCS G34KN2-PSC24G-A V02
巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-NSC18G-A V02
巴鲁夫(BALLUFF)电容式接近传感器BCS M30KN2-PSC18G-A V02
巴鲁夫(BALLUFF)电容式接近传感器BCS-20GM10-XPA1Y-8B-03
巴鲁夫(BALLUFF)微型断路器BOS-18M-PA-1PD-E5-C-S4,
巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B
巴鲁夫(BALLUFF)微型断路器BCS20MG10-XPA1Y-8B-03
巴鲁夫(BALLUFF)微型断路器BES 516-114-S4-C 10-30V
巴鲁夫(BALLUFF)微型断路器BES113-356-SA6-S4
巴鲁夫(BALLUFF)微型断路器BES113356SA6-S4
巴鲁夫(BALLUFF)微型断路器BES516-300-S135-S4-D
巴鲁夫(BALLUFF)微型断路器BES516-347-M0-C-03
巴鲁夫(BALLUFF)微型断路器BES517-140-P5-H
巴鲁夫(BALLUFF)微型断路器BESM12MI-PSC20B-S04G
巴鲁夫(BALLUFF)微型断路器BESM12MI-PS0B-S04G
巴鲁夫(BALLUFF)微型断路器BKS-S33M-00?
巴鲁夫(BALLUFF)微型断路器BOS15K-S-E1-P-S75
巴鲁夫(BALLUFF)微型断路器BRGB3-W AB12EP-P-R-K-SA8-0.3 巴鲁夫(BALLUFF)微型断路器BRGC5-W AP360-0P-G-0-SR
巴鲁夫(BALLUFF)微型断路器BTL5-E10-M2000-B-S32
巴鲁夫(BALLUFF)微型断路器BTL5-S173-M0206-P-S32
巴鲁夫(BALLUFF)微型断路器dks-s20-2-05
巴鲁夫(BALLUFF)微型断路器BES516-3005-E4-C-PU-05
巴鲁夫(BALLUFF)微型断路器BES113-356-SA31-S4
巴鲁夫(BALLUFF)微型断路器BES516-300-S-135-S4-D 36V
巴鲁夫(BALLUFF)微型断路器BES516-3021-G-E4-C-PU-02
巴鲁夫(BALLUFF)微型断路器BES516-3022-G-E5
巴鲁夫(BALLUFF)微型断路器BES516-325-G-S4-C
巴鲁夫(BALLUFF)微型断路器BES516-325-S4-C
巴鲁夫(BALLUFF)微型断路器BES516-362-S4-CW
巴鲁夫(BALLUFF)微型断路器BES516-371-SA10-S4-003
巴鲁夫(BALLUFF)传感器控制器BKS-S32M-C-00
巴鲁夫(BALLUFF)电感式接近传感器BTL5-S173-M0350-B-S32 巴鲁夫(BALLUFF)电感式接近传感器BTL-P-1012-4R
巴鲁夫(BALLUFF)光电开关BOS18M-PS-1XB-E5-C-S4
巴鲁夫(BALLUFF)电感式接近传感器BRGB3-W AB12-EP-P-R-K-SA8-03。