区域交通信号控制系统
区域交通信号控制系统课件
车流运行过程中的车队离散特性:
F a 1 bt
t 0.8T
式中:F 离散平滑系数
T 车队在连线上行驶时的平均行程时间(s)
a,b 曲线拟合参数
主要由仿真模型及优化两局部组成。
网络几何尺寸及网络交通流信息
新的信号配时
优化数据
初始信号配时
仿真模型
优化过程 最佳信号配时
网络内的延误及停车次数
性能指标PI 周期流量图
TRANSYT 基本原理图
TRANSYT仿真模型的几个主要环节
1〕交通网络构造图式:节点和连线来抽象网络 2〕周期流量变化图式 3〕车流在连线上运行状况的模拟 为描述车流在一条连线上运行的全过程,
SCATS在实行对假设干子系统的整体协 调控制的同时,也允许每个穿插口“各自 为政〞地实行车辆感应控制,前者称为 “战略控制〞,后者称为“战术控制〞。 这样可提高控制效率。
SCATS实际上是一种用感应控制对配时 方案可作局部调整的方案选择系统。
SCATS优选配时方案的各主要环 节
1.子系统的划分与合并 〔1〕子系统的划分由交通工程师根据交通流量
2. SCATS 参数优选算法简介:
SCATS把信号周期、绿信比及绿时差作为 各自独立的参数分别进展优化。优化过程中 使用的算法以所谓“综合流量〞及“饱和度〞 为主要依据。
〔1〕饱和度:SCATS所使用的饱和度指被 车流有效利用的绿灯时间与绿灯显示时间之 比。
〔2〕综合流量:为防止采用与车辆种类〔车身 长度〕直接相关的参量来表示车流流量, SCATS引入了一个虚拟的参量“综合流量来反 映通过停车线的混合车流的数量〞。
交通信号控制与SCATS系统

2019/10/23
28
国家精品课程:交通控制与管理
交通信号控制
控制基本原理
SCATS系统
2019/10/23
29
国家精品课程:交通控制与管理
交通信号控制
系统控制的核心理念
通过系统的合理配时“均衡”路网交通流量,达 到对车辆、路网的“平衡”控制,提高整体效率!
在系统控制时综合考虑路网交通,如“绿波”设 置也是有条件的,如考虑到绿波的下游是否有“消 化”能力。
2019/10/23
27
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——通讯
SCATS的通讯
中央管理级、区域管理控制、用户端、与集成平台 等之间的通信是通过TCP/IP协议通讯;
区域控制计算机与路口控制器之间的通讯可以根据 条件通过多种方式实现:
1、FSK调制电话线通讯(沈阳、上海…) 2、点对点光纤RS232通讯(杭州、宁波、广州、合 肥…) 3、TCP/IP网络通讯(重庆、苏州、上海(部分)….) 4、无线(GSM)网络通讯(广州(部分)…) 5、以上多种形式并存
交通信号控制
SCATS组成结构——路口控制器
SCATS路口控制器(ECLIPSE)
• RTA授权认证产品 • 针对路口特征的软件定义 • 多相位控制 • 特殊控制 • 高可靠性 • 高可维护性
2019/10/23
20
国家精品课程:交通控制与管理
交通信号控制
SCATS组成结构——路口控制器
SCATS 区域控制器
区域交通信号控制—— 上海的SCATS系统
上海市交警总队高工:韩如文老师
2019/10/23
1
国家精品课程:交通控制与管理
交通信号灯及控制系统设备安装与施工详解
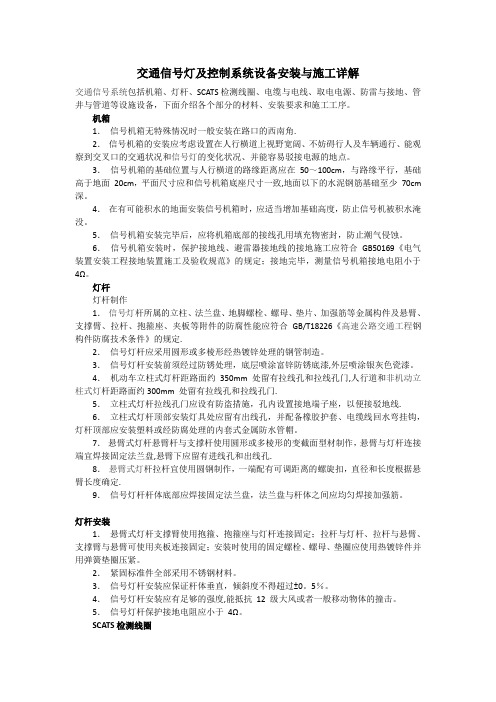
交通信号灯及控制系统设备安装与施工详解交通信号系统包括机箱、灯杆、SCATS检测线圈、电缆与电线、取电电源、防雷与接地、管井与管道等设施设备,下面介绍各个部分的材料、安装要求和施工工序。
机箱1.信号机箱无特殊情况时一般安装在路口的西南角.2.信号机箱的安装应考虑设置在人行横道上视野宽阔、不妨碍行人及车辆通行、能观察到交叉口的交通状况和信号灯的变化状况、并能容易驳接电源的地点。
3.信号机箱的基础位置与人行横道的路缘距离应在50~100cm,与路缘平行,基础高于地面20cm,平面尺寸应和信号机箱底座尺寸一致,地面以下的水泥钢筋基础至少70cm 深。
4.在有可能积水的地面安装信号机箱时,应适当增加基础高度,防止信号机被积水淹没。
5.信号机箱安装完毕后,应将机箱底部的接线孔用填充物密封,防止潮气侵蚀。
6.信号机箱安装时,保护接地线、避雷器接地线的接地施工应符合GB50169《电气装置安装工程接地装置施工及验收规范》的规定;接地完毕,测量信号机箱接地电阻小于4Ω。
灯杆灯杆制作1.信号灯杆所属的立柱、法兰盘、地脚螺栓、螺母、垫片、加强筋等金属构件及悬臂、支撑臂、拉杆、抱箍座、夹板等附件的防腐性能应符合GB/T18226《高速公路交通工程钢构件防腐技术条件》的规定.2.信号灯杆应采用圆形或多棱形经热镀锌处理的钢管制造。
3.信号灯杆安装前须经过防锈处理,底层喷涂富锌防锈底漆,外层喷涂银灰色瓷漆。
4.机动车立柱式灯杆距路面约350mm 处留有拉线孔和拉线孔门,人行道和非机动立柱式灯杆距路面约300mm 处留有拉线孔和拉线孔门.5.立柱式灯杆拉线孔门应设有防盗措施,孔内设置接地端子座,以便接驳地线.6.立柱式灯杆顶部安装灯具处应留有出线孔,并配备橡胶护套、电缆线回水弯挂钩,灯杆顶部应安装塑料或经防腐处理的内套式金属防水管帽。
7.悬臂式灯杆悬臂杆与支撑杆使用圆形或多棱形的变截面型材制作,悬臂与灯杆连接端宜焊接固定法兰盘,悬臂下应留有进线孔和出线孔.8.悬臂式灯杆拉杆宜使用圆钢制作,一端配有可调距离的螺旋扣,直径和长度根据悬臂长度确定.9.信号灯杆杆体底部应焊接固定法兰盘,法兰盘与杆体之间应均匀焊接加强筋。
城市交通信号控制系统介绍

全局式诱导屏
嵌入式光带诱导屏
城市交通信号控制系统-控制结构
采用三级分布式递阶控制结构:
中心控制级 区域控制级 路口控制级
城市交通信号控制系统-控制结构图
中心控制级
区域控制级
区域控制级
区域控制级
路口控制级
路口控制级
路口控制级
路口控制级
路口控制级
路口控制级
城市交通信号控制系统-系统配置
一台区域控制计算机可以控制128~256个 路口交通信号机。
城市交通信号控制系统-系统控制方式一
实时自适应优化控制
信号配时方案由优化算法软件根据实际交通 状况实时生成。
联机线控
信号配时方案由线控算法软件实时生成。
城市交通信号控制系统-系统控制方式二
公交优先
系统通过车载定位设备实时采集公交车车辆位置、 速度等信息 ,对公交车辆到达路口时间进行提前 预测 ,在保障交叉口交通畅通的前提下,实现公 交车辆优先放行 。
城市交通信号控制系统-发展历程
从上个世纪八十年代中期以来,就开始了城 市交通信号控制系统软件和路口交通信号机 的研制、开发工作; 参加了“七五” 《南京市交通控制系统》 和“八五” 《城市交通控制系统应用技术》 国家重点科技攻关项目的研制; 在系统总体设计、系统软件开发、系统设备 研制等方面积累了丰富的经验。
城市交通信号控制系统-主要功能
交通信号控制功能 交通信息采集功能 系统监测功能 系统配置功能 遥设信号机参数功能 交通诱导功能 自动捕捉交通违章 系统互联功能
城市交通信号控制系统-控制功能
按控制方式分为:
联机控制 单点控制 特殊控制 上述控制方式可以根据需要进行自动或 人工干预转换。
城市交通信号控制系统-路口级
UTC信号控制系统技术方案

系统综述系统概述交通信号把握系统是公安交通指挥把握系统的重要根底应用系统,其主要功能是自动协调和把握区域内交通信号灯的配时方案,均衡路网内交通流运行,使停车次数、延误时间及环境污染等减至最小,充分发挥道路系统的交通效益。
必要时,可通过指挥中心人工干预,直接把握路口信号机执行指定相位,强制疏导交通。
通过安装在道路上的车辆检测器,交通信号把握系统可以优化交通信号灯网络的交通方案,使其适应交通流变化条件,从而使在控路网中运行的车辆的延误和停车次数到达最小。
系统选型目前国内交通信号把握领域常用的有两种信号机,一为多时段定时式信号机,其次为集中协调式交通信号机,多时段定时式交通信号机在早期一度占有主流市场,但是自身技术的局限性和交通把握领域的需求不断提高,多时段定时式交通信号机已满足不了我们国家大多数地方的城市交通治理的需要。
下面对其主要区别作简洁比较:表错误!文档中没有指定样式的文字。
-1 多时段定时式信号机与集中协调式信号机主要区分功能集中协调式信号机多时段定时式信号机通信功能有无车辆检测功能有局部有本地自适应把握有无把握方案优化可自行调整、优化无,只能执行定时方案远程把握方式有无区域协调把握有无指定相位把握有有无电缆协调把握有局部有多时段定时把握有有感应把握有无手动把握有有黄闪把握有有绿冲突保护有局部有全红有有所以本系统承受集中协调式信号机。
信号灯控路口设置依据主要依据GB14886-2023《道路交通信号灯设置与安装标准》确定设置依据。
1.相交道路均为干路当相交的两条道路均为干路时,应设置信号灯。
干路指在设计速度、机动车车道条数、道路宽度和断面形式等方面符合GB50220-1995 第7 章规定的快速路、主干路、次干路〔大中城市〕和干路〔小城市〕,以及双向四车道〔含〕以上的大路。
2.相交道路含有支路当相交的两个道路中有一条为支路时,应依据交通流量和交通事故状况等条件,确定信号灯的设置。
主要道路单向仅有一条机动车道时,由主要道路进入路口的双向机动车顶峰小时流量到达900 辆以上,且由流量较大的次要道路方向进入路口的单向机动车顶峰小时流量到达270 辆以上,应设置信号灯。
交通信号控制系统简介

控制器
接收检测器传来的交通流量 信息,根据预设的控制策略 对交通信号灯进行配时。
检测器
实时监测交通流量、车 速等参数,为控制器提
供决策依据。
通信网络
实现控制器与检测器、 上位机之间的数据传输
和信息交换。
上位机软件
提供人机交互界面,方便管 理人员对交通信号控制系统
进行远程监控和操作。
应用领域及意义
应用领域
推广智能化技术应用
引入先进的智能化技术,如人工智能、大数据等,实现交通信号控 制系统的自适应调整和优化配置。
https://
2023 WORK SUMMARY
THANKS
感谢观看
REPORTING
人行感应控制
通过检测器实时监测人行道上的行人 过街需求,根据行人过街需求调整人 行信号灯的配时方案,保通流模型的自适应控制
通过建立交通流模型,实时预测未来交通流的变化趋势,并根据预测结果动态调整信号灯 的配时方案。
基于机器学习的自适应控制
利用历史交通流数据和机器学习算法,训练出能够自动调整信号灯配时的模型,并根据实 时交通流数据进行在线学习和调整。
考察交通信号控制对减少车辆尾气排 放、降低噪音和节约能源等方面的贡 献。
安全性
分析交通事故发生率、违规行为和冲 突点数量等数据,评价交通信号控制 对交通安全的作用。
存在问题诊断及原因分析
信号配时不合理
部分路口信号配时方案未充分考 虑交通流量和道路设计,导致交 通拥堵和延误增加。
设备老化与维护不
足
部分交通信号控制设备使用年限 过长,维护不及时,影响系统正 常运行和交通安全。
基于协同控制的自适应控制
通过多个交叉口之间的协同控制,实现区域交通流的优化和均衡分配,提高整个区域的交 通运行效率。
泰尔文特公司实时自适应区域信号控制系统ITACA介绍

先进的实时自适应交通信号控制系统——ITAC A(Inte l l igent T raf f i c Adapt ive Contro l of Areas)系统泰尔文特控制系统(北京)有限公司崔梅交通是国民经济的基础产业,也是社会发展和人民生活水平提高的基本条件,是人民生存四大要素–衣食住行的主要组成部分。
同时交通运输的发达程度也是衡量一个国家现代化程度的标志之一。
随着经济与技术的发展,对交通运输的各种需求明显增长。
改革开放以来,城市道路一直是城市建设的重点之一,使城市的道路建设取得了迅猛的发展。
虽然中国的交通建设和运输取得了巨大的成绩,但是还面临着巨大的挑战。
中国是一个经济持续发展的发展中国家,改革开放以来,城市化与汽车化发展十分迅猛。
城市化的迅速推进特别是大城市规模的扩张,带来了城市交通需求特别是机动车数量的迅速增长,各大中城市承受着日益沉重的压力,城市道路交通的供需严重不平衡已经成为各大中城市所共同面临的严重问题。
随着经济与技术的发展,尽管仍将建设更多的基础设施,但它已不是解决交通运输紧张的唯一办法。
面对越来越拥挤的交通,有限的资源和财力以及环境压力,建设更多的基础设施将受到限制,充分利用现有的基础设施,通过改进管理方式,应用新技术提高运输的效率则是应当采取的一项重要措施。
在现有的新技术手段中包括了自适应交通信号控制系统,它是智能交通控制系统的核心。
采用先进的自适应交通信号控制系统所产生的效益最为明显。
通过采用自适应交通信号控制系统,可以在现有的道路中减少交通拥堵和行车延误,减少交通事故的发生率和死亡率,同时可以使能源的消耗量减少,降低污染程度。
Te lvent T ráf i co y T ransporte(原Sa inco Traf i co)作为一家长期从事交通控制的知名公司和西班牙Oviedo大学合作,在总结前人经验的基础上,于1990年开发研制了一套自适应交通信号控制系统–I TAC A (Inte l l igent Traf f i c Adapt ive Contro l of Areas)系统。
交通信号控制系统操作说明书

交通信号控制系统操作说明书.第一章系统简介 (4)一、系统体系 (4)二、系统功能 (4)1. 固定配时控制 (4)2. 手动实时控制功能 (5)3. 绿波控制功能 (5)4. 黄闪 (5)5. 关灯 (5)6. 单点控制 (5)7. 人工控制 (5)三、区域管理计算机功能 (5)第二章操作说明 (6)一、系统软件基本操作 (6)1.系统配置 (6)2.设置和查看信号机属性参数 (6)二、使用说明 (7)1. 用户登录 (7)2. 系统主界面 (7)3. 路口界面 (8)4. 添加删除用户 (9)5. 修改用户密码 (10)6. 重新登录 (11)7. 退出系统 (11)8. 方案管理 (12)9. 时段管理 (13)10. 特殊日管理 (14)11. 特勤方案管理 (15)12. 绿波参数管理 (16)13. 行人请求参数管理 (17)14. 绿冲参数管理 (18)15. 感应参数管理 (19)16. 故障检测参数管理 (20)17. 信号机密码管理 (21)18. 信号机时间管理 (22)19. 控制方式设置 (23)20. 路口管理 (26)21. 路段管理 (27)22. 子区管理 (29)23. 车流量查询 (30)24. 故障报警查询 (31)25. 信号机参数修改查询 (32)26. 当前系统日志 (32)27. 查看系统日志 (33)28. 编辑地图......................................................................... 错误!未定义书签。
29. 信号控制主机管理 (34)30. 集成平台管理 (35)31. 帮助 (36)第三章注意事项 (36)一、系统运行环境 (36)二、系统工作环境 (36)三、故障判断及处理 (37)第一章系统简介一、系统体系杰瑞交通信号控制系统采用三级分布式阶梯结构:路口控制级、区域管理级和中央管理级。
区域信号协调控制

PI值上升
PI值下降
向“-”方向 试调成功
三、SCATS控制系统
SCATS系统属于响应式联机操作系统, 70年代开始研究,80年代投入使用。该 系统把信号周期、绿信比和相位差作为 各自独立的参数分别进行优选,优选过 程所使用的“算法”以饱和度和综合流 量为主要依据。它的优化过程并没有利 用数学模型,而是再各种预定的方案钟 进行优选,方法简单但配时方案的数量 是有限的。
一、 概述
(二)分类(4)
3.按控制结构分 (1)集中式控制:多个区域由一个中心控制 优点:研制与维护方便; 所需设备较少,维修方便。 缺点:通信复杂,存储数量大。 考虑因素: 需要监视和控制的实时单元的数量; 分配数据和指令所需通信线路的费用; 可选用的控制方法和执行能力的灵活性。
一、 概述
一、 概述
(二)分类(3)
2.按控制方式分 (1)方案选择式(SCATS) 通常要根据不同的交通流,事先求解出各 种配时方案,存储在中心计算机内,系统运行 时按实时采集的交通量数据,选取最适用的配 时方案,实施交通控制。 (2)方案生成式(SCOOT) 根据实时采集的交通量数据,在线算出最 优控制参数从而形成配时方案。
二、固定式脱机控制系统
TRANSYT是一种用于定周期信号控制系 统的设计方法。在该系统中,信号周期 是共用的,而且在一个确定的配时方案 执行阶段内,每个交叉口上的各个信号 阶段起迄时间点(相对于一个周期长度 的比例)是固定不变的。为了适应交通 量随时间而变化的客观情况,就要拟定 适合于不同交通状况的配时方案,以供 不同时段使用。对于已有控制方案的路 口,TRANSYT利用自身的交通模型对已有 方案进行优化。
(二)分类(5)
3.按控制结构分 (2)分层式控制 第一层:(微观层)交叉口层,一般由信号机 控制 功能包括:监视设备故障;收集检测数据 (时间占有率、流量、速度等);上传分控 中心;接受下达的指令并执行(或人工干 预)。 第二层:(中观层)分控中心 功能包括:接受信号机上传数据并上报中控 中心;形成方案并下达信号机执行。
SCATS系统简介

泰科公司
15
SCATS 交通信号控制系统
如果区域计算机出现故障或通讯中断,本地控制器则实施以时间为基础的协调运行,该模式 称为离线模式。在该模式中,相邻的路口信号依时钟协调运行,控制方案按时段选择。同时,本地 车感控制功能参与运行。时钟是由电源频率或晶振实现的。
3 SCATS 结构及通讯......................................................................................... 18
3.1 分布式、分层次控制系统 ..............................................................................................................18 3.2 系统容量 ...................................................................................................................................19 3.3 SCATS 的通讯...........................................................................................................................19
6.1 路口机机箱结构 ........................................................................................................................28 6.2 电气指标 ...................................................................................................................................28 6.3 环境指标: ...............................................................................................................................28 6.4 微处理器 ...................................................................................................................................29 6.5 功能控制模块化 ........................................................................................................................29 6.6 现场控制、编程 ........................................................................................................................29 6.7 极高的可靠性............................................................................................................................29 6.8 PD200 系列车辆检测器 ............................................................................................................29
交通信号控制系统简介

多时段定时控制 multiple intervals fixed-time control 根据交通需求变化情况,把一天的时间分成若干个控制时段,随时间的推移, 按预置的方案自动运行。
感应控制 vehicle actuated control 交叉路口信号机根据车辆检测器测得的交通流数据来调节信号显示时间的控 制方式。
周期 cycle time 信号灯色按设定的相位顺序显示一周所需的时间。
信号灯组 signal light group 一个完整的车辆红、黄、绿三头灯或行人红、绿二头灯的组合。
信号组 signal group 具有同一灯色序列的所有信号灯组的集合。
相位 phase 在一个信号周期内,同时获得通行权的一个或多个交通流的信号显示状态。
上位机 control center 在交通信号控制系统中,能和多台信号机通信并对其进行控制和监视的上端 设备
无电缆协调控制 cableless linking control 信号机之间没有通信链路,根据时钟同步,通过设定相位差来实现交叉路口 交通信号协调的控制方式。
控制方案 control plan 路口关于相位设置、相位序列设置、信号配时的有序集合。
最小绿灯时间 minimum green time 相位绿灯信号必须开启的最短安全时间。
SCATS(Sydney Coordinated Adaptive Traffic System)系统未使用交通模型,是 一种用感应控制对配时方案作局部调整的方案选择系统,属于开环控制方法,限
制了配时方案的优化程度,另外,因检测器安装在停车线处,故相位差的优选可 靠性较差,但在国内以SCATS为代表引入过我国城市最多,因价格、技术支持以及 适应混合交通流状况差而未取得显著效果。
交通信号控制系统框图及相关说明
交通信号控制系统框图及相关说明
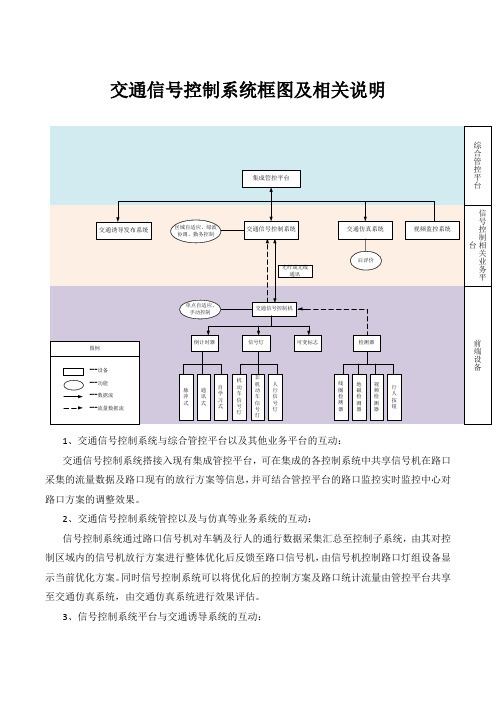
1、交通信号控制系统与综合管控平台以及其他业务平台的互动:
交通信号控制系统搭接入现有集成管控平台,可在集成的各控制系统中共享信号机在路口采集的流量数据及路口现有的放行方案等信息,并可结合管控平台的路口监控实时监控中心对路口方案的调整效果。
2、交通信号控制系统管控以及与仿真等业务系统的互动:
信号控制系统通过路口信号机对车辆及行人的通行数据采集汇总至控制子系统,由其对控制区域内的信号机放行方案进行整体优化后反馈至路口信号机,由信号机控制路口灯组设备显示当前优化方案。
同时信号控制系统可以将优化后的控制方案及路口统计流量由管控平台共享至交通仿真系统,由交通仿真系统进行效果评估。
3、信号控制系统平台与交通诱导系统的互动:
信号控制系统统计汇总的路口流量、车速、占有时间、排队长度等信息可以由管控平台共享给交通诱导发布系统,由其控制各交通诱导屏进行信息发布,可引导车辆流向进一步提升区域控制优化效果。
4、信号控制系统实施勤务控制时与视频监控系统的互动:
信号控制系统在进行勤务预案的下达及控制时,可以共享管控平台中的路口监控系统的实时传输数据,提升勤务控制效果并减少对社会车辆通行的延误。
交通信号灯及控制系统设备安装与施工详解
交通信号灯及控制系统设备安装与施工详解Newly compiled on November 23, 2020包括机箱、灯杆、SCATS检测线圈、电缆与电线、取电电源、防雷与接地、管井与管道等设施设备,下面介绍各个部分的材料、安装要求和施工工序。
机箱1.信号机箱无特殊情况时一般安装在路口的西南角。
2.信号机箱的安装应考虑设置在人行横道上视野宽阔、不妨碍行人及车辆通行、能观察到交叉口的交通状况和的变化状况、并能容易驳接电源的地点。
3.信号机箱的基础位置与人行横道的路缘距离应在 50~100cm,与路缘平行,基础高于地面 20cm,平面尺寸应和信号机箱底座尺寸一致,地面以下的水泥钢筋基础至少 70cm深。
4.在有可能积水的地面安装信号机箱时,应适当增加基础高度,防止信号机被积水淹没。
5.信号机箱安装完毕后,应将机箱底部的接线孔用填充物密封,防止潮气侵蚀。
6.信号机箱安装时,保护接地线、避雷器接地线的接地施工应符合 GB50169《电气装置安装工程接地装置施工及验收规范》的规定;接地完毕,测量信号机箱接地电阻小于 4Ω。
灯杆灯杆制作1.杆所属的立柱、法兰盘、地脚螺栓、螺母、垫片、加强筋等金属构件及悬臂、支撑臂、拉杆、抱箍座、夹板等附件的防腐性能应符合 GB/T18226《钢构件防腐技术条件》的规定。
2.信号灯杆应采用圆形或多棱形经热镀锌处理的钢管制造。
3.信号灯杆安装前须经过防锈处理,底层喷涂富锌防锈底漆,外层喷涂银灰色瓷漆。
4.机动车立柱式灯杆距路面约 350mm 处留有拉线孔和拉线孔门,人行道和杆距路面约300mm 处留有拉线孔和拉线孔门。
5.立柱式灯杆拉线孔门应设有防盗措施,孔内设置接地端子座,以便接驳地线。
6.立柱式灯杆顶部安装灯具处应留有出线孔,并配备橡胶护套、电缆线回水弯挂钩,灯杆顶部应安装塑料或经防腐处理的内套式金属防水管帽。
7.悬臂式灯杆悬臂杆与支撑杆使用圆形或多棱形的变截面型材制作,悬臂与灯杆连接端宜焊接固定法兰盘,悬臂下应留有进线孔和出线孔。
UTC信号控制系统技术方案

系统综述系统概述交通信号控制系统是公安交通指挥控制系统的重要基础应用系统,其主要功能是自动协调和控制区域内交通信号灯的配时方案,均衡路网内交通流运行,使停车次数、延误时间及环境污染等减至最小,充分发挥道路系统的交通效益。
必要时,可通过指挥中心人工干预,直接控制路口信号机执行指定相位,强制疏导交通。
通过安装在道路上的车辆检测器,交通信号控制系统可以优化交通信号灯网络的交通方案,使其适应交通流变化条件,从而使在控路网中运行的车辆的延误和停车次数达到最小。
系统选型目前国内交通信号控制领域常用的有两种信号机,一为多时段定时式信号机,其次为集中协调式交通信号机,多时段定时式交通信号机在早期一度占有主流市场,但是自身技术的局限性和交通控制领域的需求不断提高,多时段定时式交通信号机已满足不了我们国家大多数地方的城市交通管理的需要。
下面对其主要区别作简单比较:表错误!文档中没有指定样式的文字。
-1多时段定时式信号机与集中协调式信号机主要区别所以本系统采用集中协调式信号机。
信号灯控路口设置依据主要根据GB14886-2006《道路交通信号灯设置与安装规范》确定设置依据。
1.相交道路均为干路当相交的两条道路均为干路时,应设置信号灯。
干路指在设计速度、机动车车道条数、道路宽度和断面形式等方面符合GB50220-1995第7章规定的快速路、主干路、次干路(大中城市)和干路(小城市),以及双向四车道(含)以上的公路。
2.相交道路含有支路当相交的两个道路中有一条为支路时,应根据交通流量和交通事故状况等条件,确定信号灯的设置。
主要道路单向仅有一条机动车道时,由主要道路进入路口的双向机动车高峰小时流量达到900辆以上,且由流量较大的次要道路方向进入路口的单向机动车高峰小时流量达到270辆以上,应设置信号灯。
(主要道路指两条相交道路中流量较大的道路,次要道路指两条相交道路中流量较小的道路)。
主要道路单向具有两条或两条以上机动车道时,由主要道路进入路口的双向机动车高峰小时流量达到1050辆以上,且由流量较大的次要道路方向进入路口的单向机动车高峰小时流量达到300辆以上,应设置信号灯。
交通控制系统的分类

城市交通控制系统的分类2009-09-21 整理:中国智能交通网来源:中国智能交通网中国智能交通网作者:智能交通网浏览次数:706新闻投稿、合作信箱:tougao@核心提示:城市道路交通控制系统可以从空间关系、控制方式和控制理念上对城市道路交通控制系统分类。
城市交通控制系统的分类城市道路交通控制系统可以从空间关系、控制方式和控制理念上对城市道路交通控制系统简单分类。
1按空间关系划分从空间关系上可以把城市交通系统分划为单交叉口控制(点控制)、交通干线的协调控制(线控制)和区域交叉口的网络控制(面控制)三种形式。
l)单个交叉口的点控制单个交叉口的点控制是一种最基本的控制方式。
如果某个交叉口与其相邻的交又口相距较远,或路口之间存在较多的车辆分流与合流(如中间有大型商场、机关单位等),可以利用一台信号控制器控制交叉口的信号变化,此时相邻交叉口之间的信号配时不存在固定的协调关系。
孤立交叉口点控制的控制参数是信号周期和绿信比,控制的目标一般是车辆延误和交叉口的通行能力。
在理想的情况下,希望总延误时间最小和交叉口的通行能力得到最大的利用。
由于点控制的设备简单、投资省、维护方便,至今仍是应用较多的一种信号控制方式。
从技术上讲,它又分为离线点控制和在线点控制两种形式。
前者采用定时信号配时技术,目前仍然是其它控制方式的配时基础;后者是交通响应控制或车辆感应控制,它是根据交叉口各个入口交通流的实际分布情况,合理分配绿灯时间到各个相位,从而满足交通需求。
2)干线交通的协调控制城市路网中的交通干线承担着很重的交通负荷,保证干线的交通畅通对改善一个地区甚至一个城市的交通状况往往起着至关重要的作用。
在城市交通路网中,有时交叉口相距很近,两个相邻的交叉口之间的距离通常不足以使一小队车流在有限时间内完全疏散。
单个交叉口分别设置单点信号控制时,车辆经常遇到红灯,时停时开,行车不畅,环境污染严重。
为了减少车辆在各个交叉口的停车次数,特别是当干线的车辆比较畅通时,相邻交叉口之间的控制方案宜采用相互协调的控制策略。
交通信号控制系统
1.1 概述交通信号控制系统是智能交通管理系统的重要子系统,其主要功能是自动协调和控制整个控制区域内交通信号灯的配时方案,均衡路网内交通流运行,使停车次数、延误时间及环境污染减至最小,充分发挥道路系统的交通效益。
必要时,可通过控制中心人工干预,直接控制路口信号机执行指定相位,强制疏导交通。
NATS 交通信号控制系统用于城市道路交通的控制与管理,可以提高车速、减少延误、减少交通事故、降低能耗和减轻环境污染。
从上个世纪八十年代中期以来,中国电子科技集团公司第二十八研究所就开始了NATS 系统和路口交通信号控制机的研制开辟。
该系统通过了国家鉴定验收,获得了国家重大科技攻关成果奖、公安部科技进步一等奖和国家科技进步三等奖。
NATS 交通信号控制系统特点:适合中国城市混合交通的特点,具有自行车控制功能;系统支持多种硬件平台(微机、工作站以及大、中、小型计算机),多种软件平台(WINDOWS 98/NT/2000/XP);支持多种外部设备(动态地图板、室内信息板、室外信息板、违章记录仪…);支持多种系统互联(电视监视系统、地理信息系统、车辆定位系统、违章捕捉系统、信息管理系统… );系统配置灵便、裁剪方便;支持远程控制和维护;支持多种通信方式 (光缆、电话线、GPRS/CDMA 无线通信、城域网… );系统人机界面友好,显示内容丰富,操作使用方便;与国外同类系统相比,具有很高的性能价格比。
1.2 系统结构1.2.1 NATS 交通信号控制系统采用三级分布式递阶基本控制结构:中心控制级, 区域控制级,路口控制级(参见下图)。
1.2.2区域监控台 动态地图板 室内信息板 违章捕捉仪数据通信控制机(光端机)光纤光端机路口信号机 (光端机) 路口信号机 (光端机)室外情报板 (光端机)室外情报板车 辆 检 测 器交 通 信 号 灯 车 辆 检 测 器 交通信号灯 … … 中心控制级区域控制级 1 区域控制级 2 区域控制级 N路口控制级 路口控制级 路口控制级 路口控制级 路口控制级 路口控制级其中:区域控制计算机监视、控制、协调整个系统的运行,可同时控制128 个外部设备,如果外部设备超过128 路,可采用多台区域控制计算机。
交通信号控制系统技术方案

...智能交通信号控制系统技术方案目录一、交通信号控制系统综述................................................................................... - 3 -1.1系统设计原则.................................................................................................................. - 3 -1.2系统建设依据.................................................................................................................. - 5 -1.3交通信号控制系统组成 ............................................................................................... - 5 -二、交通信号控制系统功能指标.......................................................................... - 8 -2.1交通信号控制器............................................................................................................. - 8 -2.1.1交通信号控制器功能.................................................................... - 8 -2.1.2交通信号控制器指标.................................................................. - 10 -2.2交通信号控制系统....................................................................................................... - 12 -2.2.1交通信号控制系统组成 ............................................................. - 12 -2.2.2系统功能......................................................................................... - 14 -2.2.3区域自适应控制........................................................................... - 15 -三、交通信号远程控制系统................................................................................. - 17 -3.1详细配置信号机运行数据......................................................................................... - 17 -3.2信号机实时控制........................................................................................................... - 23 -3.3信号机运行状态........................................................................................................... - 24 -3.4系统故障状态................................................................................................................ - 25 -3.5警卫线路......................................................................................................................... - 25 -3.6实时流量......................................................................................................................... - 25 -3.7流量查询......................................................................................................................... - 26 -四、区域自适应优化控制 ..................................................................................... - 28 -4.1系统控制策略................................................................................................................ - 28 -4.1.1单点感应控制................................................................................ - 29 -4.1.2单点自适应控制........................................................................... - 30 -4.1.3干道绿波控制................................................................................ - 30 -4.1.4感应式协调控制........................................................................... - 38 -4.1.5区域自适应控制........................................................................... - 39 -4.1.6拥堵控制......................................................................................... - 42 -4.1.7潮汐车道控制................................................................................ - 42 -4.1.8优先控制......................................................................................... - 43 -4.2路网组态模块................................................................................................................ - 44 -4.3参数配置模块................................................................................................................ - 45 -五、道路交通信息采集系统................................................................................. - 53 -5.1 系统总体设计............................................................................................................... - 53 -5.2信息采集分系统设计.................................................................................................. - 54 -5.3交通数据综合处理....................................................................................................... - 56 -六、交通信号控制器 .............................................................................................. - 58 -6.1故障检测......................................................................................................................... - 59 -6.2防雷措施......................................................................................................................... - 60 -6.3信号机机箱防护........................................................................................................... - 61 -6.4手持式交通信号控制器 ............................................................................................. - 61 -6.5信号机结构介绍........................................................................................................... - 63 -6.7安装说明图 .................................................................................................................... - 63 -6.8信号机实际效果........................................................................................................... - 71 -一、交通信号控制系统综述根据城市发展的一般规律,在城市发展与演变过程中,交通工具的增长速度通常远高于城市道路和其他交通设施的增长,在经济快速发展的年代,城市交通往往面临着巨大的压力与挑战。
基于PLC的智能交通信号控制系统

基于PLC的智能交通信号控制系统一、本文概述随着城市化进程的加速和交通需求的不断增长,传统的交通信号控制系统已经难以满足现代城市交通管理的需求。
为了应对日益复杂的交通状况,提高道路通行效率,减少交通拥堵和事故,基于PLC(可编程逻辑控制器)的智能交通信号控制系统应运而生。
本文旨在深入探讨基于PLC的智能交通信号控制系统的设计原理、实现方法以及实际应用效果,以期为我国城市交通管理水平的提升提供有益的参考和借鉴。
本文将简要介绍智能交通信号控制系统的发展历程和现状,分析传统交通信号控制系统存在的问题和不足,以及基于PLC的智能交通信号控制系统相比传统系统的优势。
本文将详细介绍基于PLC的智能交通信号控制系统的基本架构和核心技术,包括PLC的工作原理、硬件组成、软件系统设计以及信号控制算法等方面。
通过深入分析这些关键技术,读者可以更加清晰地了解该系统的核心思想和工作原理。
本文将结合具体案例,分析基于PLC的智能交通信号控制系统在实际应用中的效果,包括提高道路通行效率、减少交通拥堵和事故等方面的具体表现。
还将探讨该系统在未来城市交通管理中的发展前景和挑战,以期为未来智能交通信号控制系统的研究和发展提供有益的启示和思考。
通过本文的阐述,读者可以全面了解基于PLC的智能交通信号控制系统的设计理念、实现方法和实际应用效果,为我国城市交通管理水平的提升提供有益的参考和借鉴。
二、PLC技术基础PLC,全称可编程逻辑控制器(Programmable Logic Controller),是一种专为工业环境设计的数字运算电子系统。
自20世纪60年代末期诞生以来,PLC凭借其高可靠性、易于编程、适应性强等特点,已广泛应用于各种工业控制领域。
在智能交通信号控制系统中,PLC技术同样发挥着不可或缺的作用。
PLC的核心是中央处理器(CPU),它负责执行存储在存储器中的程序,以实现逻辑运算、顺序控制、定时、计数和算术运算等功能。
PLC还配备了多种输入输出接口,用于与各种外部设备(如传感器、执行器等)进行连接和通信。
智能交通信号控制系统方案
智能交通信号控制系统方案2.1系统概述交通信号控制系统是城市交通管理系统的一个重要子系统,是集现代计算机、通信和控制技术于一体的综合系统。
它依靠先进适用的交通模型和算法对交通信号控制参数(周期、绿信比和相位差)进行自动优化调整,运用电子、计算机、网络通信和GIS电子地图等技术手段对交通路口进行智能化、科学化交通控制,从而实现交叉口群交通信号的最佳协调控制。
其主要功能是自动调整控制区域内的配时方案,均衡路网内交通流运行,使停车次数、延误时间及环境污染等减至最小,充分发挥道路系统的交通效益,必要时,可通过指挥中心人工干预,强制疏导交通。
交通信号控制系统由交通信号灯、车辆检测设备、交通信号机、数据通信传输系统、区域控制机、中央控制机组成。
信号数据直接接入路口接入工业以太网交换机,实现信号数据接入和传输,与监控、电警等数据共享交换机实现远程传输。
本方案所采用的交通信号控制系统,依靠先进适用的交通模型和算法对交通信号控制参数(周期、绿信比和相位差)进行自动优化调整,运用电子、计算机、网络通信和GIS电子地图等技术手段对交通路口进行智能化、科学化交通控制,从而实现交叉口群交通信号的最佳协调控制。
具体来说,系统根据采集的交通流量信息和系统的优化方式,可以实现对控制区域内的所有路口进行有效的实时自适应优化控制;通过设置和调用交通信号配时方案,改变周期、绿信比和相位差,协调路口间的交通信号控制,可满足不断变化的交通需求,比如早高峰,晚高峰,公共节假日,夜间或特殊事件等。
同时,系统具有采集、处理、存储、提供控制区域内的车流量、占有率、饱和度、排队长度等交通信息的功能,以供交通信号配时优化软件使用,同时供交通疏导和交通组织与规划使用。
2.2点位分布本项目的交通信号控制系统分为两部分:新建点位和改造点位。
具体点位分布如下表所示:1)交通信号控制系统新建点位序布点具体位置方向车道数量1 九九路与山谷大道路口东往西3+1(非机)西往东3+1(非机)南往北3+1(非机)北往南3+1(非机)2 良塘大道与芦良西路交叉口东往西2+1(辅道)西往东2+1(辅道)南往北 2北往南 2东往西 23 承风路与幕阜大道路口西往东 2 南往北 2 北往南 24 宁红大道延长线与洋洲大道路口东往西2+1(辅道)西往东 3南往北 3北往南 15 良塘大道与江渡大道路口东往西3+1(非机)西往东3+1(非机)南往北3+1(非机)北往南3+1(非机)6 东盟佳苑路口东往西 1 西往东 1 南往北 1 北往南 17 柯龙线与黄田里大道东往西 3西往东 2南往北3+1(渠化道)2)交通信号控制系统改造点位序布点具体位置方备注1 宁红大桥南路口 4 换信号控制器,改联运2 英才中学路口3 换信号控制器,改联运3 山谷大道与散原路交4 换信号控制器,改联运4 XX汽运门口(汽车总 4 换信号控制器,改联运5 宁红大道秀水大道路 4 换信号控制器,改联运6 宁红大道山谷大道路 3 换信号控制器,改联运7 山谷大道与秀水大道 4 换信号控制器,改联运8 韩源路口(欧克科技 4 换信号控制器,改联运9 散原路与义宁大道 4 换信号控制器,改联运10 宁红市场路口 3 换信号控制器,改联运11 体育馆路口 4 换信号控制器,改联运12 南桥路口 4 换信号控制器,改联运13 妇幼保健医院 4 换信号控制器,改联运2.3系统结构设计2.3.1系统总体结构本交通信号控制系统应包括中心交通信号控制系统、交通信号控制机、道路交通信息采集系统和通信网络四个部分组成。
交通信号控制系统解决方案

二、海信信号系统产品组成
B/S版:UTC 6.0
UTC信号控 制中心平台
线圈、地磁 检测器
海信交通信 号控制系统
管理版:CMT 6.0
维护工具软 件
仿真软件及 建模
智能信号机:SC 6101 协调感应信号机:SC 3101 单点联网信号机:SC 1101 匝道机:SC7001 车道机:SC7002
自适应交通 信号机
分析:大多信号系统都提
理论控制算法。现有成熟
供了一套基础的信号控制
的信号机控制算法大多是
算法。没有一种算法能适
建立在交通的非饱和状态
用所有场景的控制
5/61
第一部分 交通控制的现状与行业问题
二、交通控制的行业问题
3、标准化与开放性问题
系统无法互联、实现统一控制
用户选择产品的灵活性被限制
6/61
第一部分 交通控制的现状与行业问题
三、信号控制机
4、具备完备的机柜管理功能
机柜内设置水位、温湿度及烟雾传感器、门控开关及监控板,探测警报并上 传至中心。
机柜可实现智能刷卡开门,可单独设置开前门、后门、侧门。 机柜的智能电子锁可实现远程开门控制。
28/61
Байду номын сангаас
第三部分 海信信号控制系统介绍
三、信号控制机
5、支持远程升级及U盘一键升级
13/61
第二部分 海信的针对性解决方案
二、海信精细化的信号控制策略
3、针对公交优先的控制策略(续)
绿灯延长控制策略 红灯早断控制策略
在 福 州 、 烟 台 得 到 应 用
14/61
第二部分 海信的针对性解决方案
二、海信精细化的信号控制策略
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
15
车流运行过程中的车队离散特性:
F a 1bt
t 0.8T
式中: F离散平滑系数
T 车队在连线上行驶 平时 均的 行程时间 s)(
a,b曲线拟合参数
把上游连线“驶出”图式上的每一纵坐标值乘以F即 可得到下游停车线的“到达”图式。
综上所述,不难推算出第i个时段内被阻于停车线的 车辆数mi。
TRANSYT是一种脱机操作的定时控制系统,系统 主要由仿真模型及优化两部分组成。
可编辑ppt
13
网络几何尺寸及网络交通流信息
新的信号配时
优化数据
初始信号配时
仿真模型
优化过程 最佳信号配时
网络内的延误及停车次数
性能指标PI 周期流量图
TRANSYT 基本原理图
TRANSYT仿真模型的几个主要环节
第十一章 区域交通信号控制系统
本章内容:
第一节 概念与分类 第二节 定时式脱机操作系统 第三节 自适应式联机操作系统
可编辑ppt1源自第十一章 区域交通信号控制系统
主要内容:了解区域交通信号控制系统的 分类,定时式脱机操作系统和自适应式联 机操作系统的基本原理。
重 点 与 难 点 : TRANSYT 、 SCOOT 、 SCATS三种具有代表性的控制系统的控制 原理和基本思想。
可编辑ppt
7
3.按控制结构分
(1)集中式计算机控制结构 (2)分层式计算机控制结构
可编辑ppt
8
1)集中式计算机控制结构
将网络内所有信号联结起来,用一台中、小型计算 机或多台微机联网对整个系统进行集中控制。其原 理结构均较简单。
优点: (1)全部控制设备只位于一个中心,操作方便; (2)系统的研制和维护不太复杂; (3)所需设备较少,维修容易。
第二节 定时式脱机操作系统
TRANSYT(Traffic Network Study Tool) “交通网 络研究工具”。是英国交通与道路研究所(TRRL) 于1966年提出的脱机优化网络信号配时的一套程 序。最新版本是11版。
美国:TRANSYT-7F
法国:将TRANSYT改为THESEE和THEBES型
1)交通网络结构图式:节点和连线来抽象网络 2)周期流量变化图式 3)车流在连线上运行状况的模拟 为描述车流在一条连线上运行的全过程,
TRANSYT使用了如下的周期流量图式: (1)到达流量图式(“到达”图式) (2)驶出流量图式(“驶出”图式) (3)饱和驶出图式(“满流”图式)
可编辑ppt
可编辑ppt
6
2. 按控制方式分类:
(1)方案选择方式 对应于不同的交通流,事先做好各类交通模型和 相应的控制参数并存储在计算机内,按实时采集 的实际交通数据,选取最适用的交通模型与控制 参数,实施交通控制。
(2)方案形成方式 根据实时采集的交通流数据,实时算出最佳交通 控制参数形成信号配时控制方案,当场按此方案 操纵信号控制机运行交通信号灯。
可编辑ppt
2
第一节 概念与分类
区域交通信号控制(简称面控制)系统的对象是 城市或某个区域中所有交叉口的交通信号。
区域交通信号控制系统的正确的概念是:把城区 内的全部交通信号的监控,作为一个指挥控制中 心管理下的一套整体的控制系统,是单点信号、 干线信号系统和网络信号系统的综合控制系统。
建立这种概念的好处: 1)整体监视和控制 2)可因地制宜地选用合适的控制方法 3)可有效、经济地使用设备
上层控制主要执行全系统协调优化的战略控制任 务
下层控制主要执行个别交叉口合理配时的战术控
制任务
可编辑ppt
10
这种结构可以避免集中结构的缺点,可有降级 控制的功能,提高了系统的可靠性;但需增加 设备,投资较高。
例如一种三级分布式控制结构: 第一级 位于交叉口,由信号控制机控制 第二级 位于所控制区域的一个比较中心的地 点 第三级 位于城市内一个合理的中心位置,起 命令控制中心的作用
可编辑ppt
11
多级控制的优点 (1)通过数据的预处理和集中传输,能减少传输费用 (2)由于系统不依赖于一个中心控制或集中的传输机
构,系统具有较高的故障保护能力,提高了系统可 靠性。
(3)能处理实时单元的容量较大(检测器,交叉口信 号机等)
(4)控制方法和执行能力比较灵活 多级控制的缺点 (1)需要的设备多,投资高 (2)现场设备的维护比较复杂 (3)控制程序比较复杂 (4)要提供更多的控制地点
可编辑ppt
5
(2)适应式联机操作控制系统
是一种能够适应交通量变化的“自适应控制系 统”,也叫“动态响应控制系统”。在控制区 域中设置检测器,实时采集交通数据并实施联 机最优控制。
特点:自适应控制系统结构复杂、投资高、对 设备可靠性要求高,但能较好地适应交通流的 随机变化,提高了控制的效益。
区域控制系统可实施城市交通运输的策略,提高现有道路 的交通效率,改善道路交通安全,节省能源消耗,减少环 境污染,收集交通数据,提供交通情报,为整个社会提供 综合的经济效益。
是缓解城市交通问题的重要措施。
可编辑ppt
4
二、分类
1. 按控制策略分 (1)定时式脱机操作控制系统
利用交通流历史及现状统计数据,进行脱机优化 处理,得出多时段的最优信号配时方案,存入控 制器或控制计算机内,对整个区域交通实施多时 段定时控制。 特点:控制简单,可靠,效益投资比高,但不能 适应交通流的随机变化。
可编辑ppt
3
区域控制系统的发展
是随着交通控制理论的不断发展,通讯、检测、计算机技 术在交通控制领域的广泛应用而发展起来的。
早期的区域控制系统着重于对周期、绿信比和时差等交通 信号参数进行最优控制。
现代的交通控制系统是多种技术的综合体,它包括车辆检 测、数据采集与传输、信息处理与显示、信号控制与最优 化、电视监视、交通管理与决策等多个组成部分。
缺点: 大量数据的集中处理及整个系统的集中控制,
需要庞大的通信传输系统和巨大的存储容量,这就
极大地影响了控制的实时性,并限制了集中控制的 区域范围。
可编辑ppt
9
2)分层式计算机控制结构
整个控制系统分成上层控制与下层控制。
上层控制主要接受来自下层控制的决策信息,并 对这些决策信息进行整体协调分析,从全系统战 略目标考虑修改下层控制的决策。下层控制则根 据修改后的决策方案再做必要的调整。