链条输送式变量施肥抛撒机的设计与试验_张睿
厩肥施肥机的现状及发展趋势
8农机使用与维修2020年第9期厩肥施肥机的现状及发展趋势冯艳辉I,杨华S韩宏宇S王晋2(1.黑龙江省农垦科学院农业工程研究所,哈尔滨150038;2.黑龙江德沃科技开发有限公司,哈尔滨150086)摘要:在农业生产过程中,化学肥料的过量施用给土地带来严重影响与破坏,在大力提倡有机肥代替化肥的政策背景和实际需求下,成熟实用的有机肥抛撤装备亟待研究和开发。
针对2町L-9立轴后抛式厩肥施肥机在生产实践中实现液压马达无级变速调控,传送链实现有机肥料按照用户需求进行定量抛撒的技术问题,分析其特点,预测未来殳轴后抛式厩肥施肥机的发展趋势,为立轴后抛式厩肥施肥机领域的相关研究提供参考。
关键词:厩肥施肥机;现状;发展趋势中图分类号:S224.2文献标识码:A doi:10.14031/ki.njwx.2020.09.0030引言立轴后抛式厩肥施肥机是一种以拖拉机为动力,把禽畜粪便、派肥(发酵后的有机肥)、厩肥(包括堆肥)进行抛撒还田的农用新型机具。
该设备主要由机架、箱体、车桥系统、液压系统、传动系统、送肥装置、抛撒系统、重型双联轴链条驱动齿轮箱、驱动抛肥器齿轮箱等部件组成。
作业时,液压驱动链条,通过安装于拖拉机内的液压流量控制阀,控制链条速度,调节抛肥量,将厩肥抛撒于田间。
抛撒厩肥可提高土壤养分的有效性,改良土壤结构,提高土壤的保肥力和保水力,减少粪污环境污染。
作为大田农作物高效抛撒厩肥的农机具,从2015年提出化肥零增长行动目标开始,盲目施用化肥和过量施用化肥的现象有效减少,由于传统的施用厩肥方式,人工作业运输不便、抛撒效率低、抛撒不均匀、劳动强度大、工作条件差等弊端而深受局限,机械施肥逐渐受到重视,立轴后抛式厩肥施肥机弥补了以往人工抛撒厩肥的不足的问题。
同时,减轻了劳动强度,提高撒肥效率与质量,对农牧业禽畜粪便还田机械化应用具有重要的意义。
1国内外立轴后抛式厩肥施肥机发展现状1.1国外立轴后抛式厩肥施肥机发展现状意大利、法国等工农业发达国家非常重视农业机械现代化。
有机肥撒播机关键部件设计及参数优化
有机肥撒播机关键部件设计及参数优化作者:温翔牙星欢来源:《农机使用与维修》2019年第06期摘要:针对一种有机肥撒播机械的施撒锥盘进行了结构设计和参数优化。
关键词:农业机械;EDEM;施撒锥盘中图分类号:S224.2 ; ; ; ;文獻标识码:Adoi:10.14031/ki.njwx.2019.06.012现阶段我国在有机肥料的使用上还主要停留在人工撒施阶段,撒施效率过低,工作量繁重,最佳解决途径是实现机械化撒施。
目前,国外大多采用圆盘式撒肥机进行撒肥作业。
查阅相关文献,锥角形圆盘的撒播幅宽及撒播均匀度要优于传统的水平圆盘。
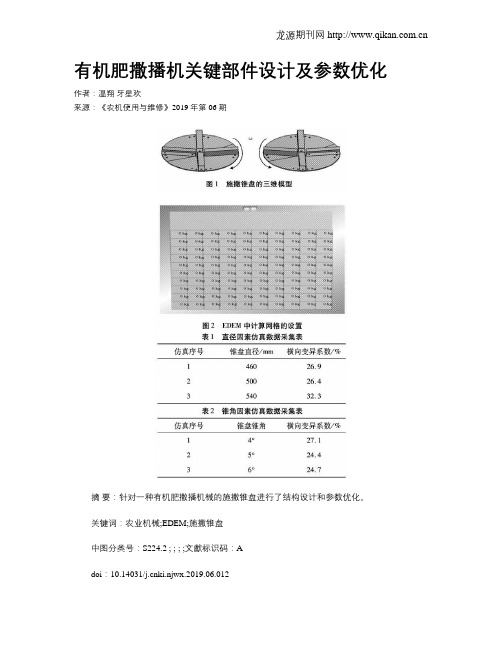
本文对施撒锥盘进行结构设计并利用EDEM进行仿真分析,得到其最优结构参数。
1 施撒锥盘的结构设计撒肥锥盘直径大小不同,肥料颗粒落在地面上位置不同。
参考文献资料和实践应用表明,撒肥锥盘的直径范围应为500~600 mm,厚度取5 mm。
圆盘结构采用倒锥形,预设锥盘离地800 mm。
锥盘上的刮肥板设计成导轨型结构,目的是在锥盘高速作业时,防止有机肥颗粒散落,可以沿着导轨槽进行撒抛。
同时刮肥板和撒肥盘均采用1Cr18Ni9Ti材料,以增强施肥部件的耐腐蚀性,增加机具使用寿命。
平键连接结构简单、拆装方便、对中性较好,广泛应用于各类机械中。
故在锥盘中央设计一厚度10 mm的凸台,其外径为30 mm,内径20 mm,并开槽以配合液压马达上12×8 mm的平头平键。
锥盘直径以及锥角为锥盘结构的关键参数,在运用EDEM进行单变量仿真实验实现优化设计(如图1所示)。
2 利用EDEM仿真进行结构参数优化使用Hertz-MindlinwithJKR模型,参考王晨在车载有机肥捡拾装置的研究中提供的EDEM 虚拟实验数据,将表面黏附能设定为30 J/m2。
简化施撒装置,将其保存为 stp 格式导入到EDEM 中(如图2所示)。
将左右锥盘的动态一栏设置为线性旋转 ;(Linear Rotation),定义材料为 steel,其余挡板为固定模型,同样定义材料为 steel。
果园挖坑施肥机与控制系统设计
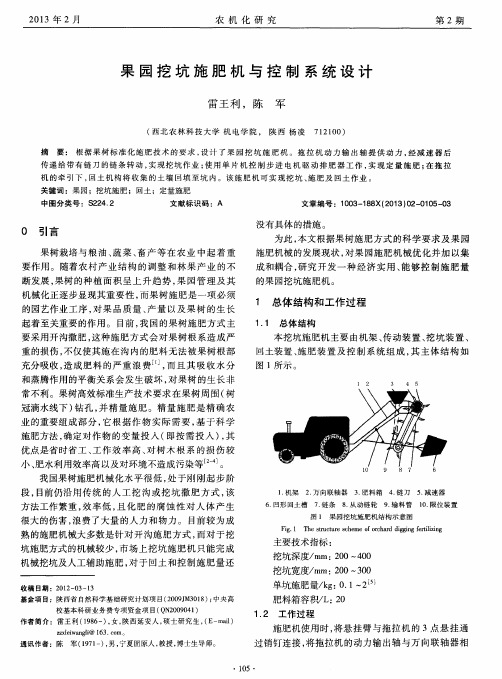
1 总体结构和工作过程
1 . 1 总 体结构
本 挖 坑施 肥 机 主要 由机 架 、 传动装置、 挖坑装置 、
回土装置 、 施肥装 置及控 制系统组 成 , 其 主体结 构如
图 1所 示 。
常不利。果树高效标准生产技术要求在果树周围( 树
主要 技术 指标 : 挖 坑深度/ mm: 2 0 0~ 4 0 0
机械挖坑及人工辅助施肥 , 对于 回土和控制施 肥量还
收稿 日期 :2 0 1 2 — 0 3 — 1 3
基 金项 目:陕西 省 自然科学基 础研究计划项 目( 2 0 0 9 J M3 0 1 8 ); 中央高
挖坑宽度/ m m: 2 0 0 ~ 3 0 0
冠滴水线下 ) 钻孔 , 并 精量施肥 。精量施肥是 精确农 业 的重要组成部分 , 它根 据作物 实际需要 , 基 于科学 施肥方法 , 确定对作 物的变量投入 ( 即按需投 入 ) , 其
优点是省时省工 、 工作效率 高 、 对树木 根系 的损 伤较
小、 肥水利用效率高以及对环境不造成污染等 。
没有具体的措施。
为此 , 本 文 根据 果 树 施 肥 方 式 的科 学 要 求 及 果 园
施肥机械 的发展现状 , 对果 园施肥机械优化并加 以集
成和耦合 , 研究开发一 种经济 实用 、 能够控制施 肥量
的果 园挖 坑 施肥 机 。
的园艺作业 工序 , 对果 品质量 、 产 量 以及果 树 的生 长 起着至关重要 的作用。 目前 , 我 国的果树施肥方式主 要采 用 开 沟撒 肥 , 这 种施 肥 方 式会 对 果 树 根 系造 成 严 重的损伤 , 不仅使其施 在沟 内的肥料无 法被果树根部 充分吸收 , 造成肥料 的严重浪 费¨ , 而且其 吸收水分
配肥撒肥机研究及发展现状
配肥撒肥机研究及发展现状韩守强;闫银发;宋占华;李法德;田富洋;宋华鲁;盖顺华;许荣浩【摘要】化肥能够为农作物提供生长所需的营养成分,施用化肥对于农作物增产增收有重要意义.使用配肥撒肥机撒施肥料有助于减少化肥使用量,提高化肥利用率,对农民节省开支和增加收入以及环境保护等有积极的影响.分析了国内外配肥撒肥机的研究和发展现状,并针对国内配肥撒肥机存在的问题提出了发展对策.【期刊名称】《农业工程》【年(卷),期】2017(007)006【总页数】5页(P5-8,13)【关键词】配肥撒肥机;化肥;增产增收【作者】韩守强;闫银发;宋占华;李法德;田富洋;宋华鲁;盖顺华;许荣浩【作者单位】山东农业大学机械与电子工程学院,泰安271018;山东农业大学机械与电子工程学院,泰安271018;山东省园艺机械与装备重点实验室,泰安271018;山东农业大学机械与电子工程学院,泰安271018;山东农业大学机械与电子工程学院,泰安271018;山东省园艺机械与装备重点实验室,泰安271018;山东农业大学机械与电子工程学院,泰安271018;山东农业大学机械与电子工程学院,泰安271018;山东农业大学机械与电子工程学院,泰安271018;山东农业大学机械与电子工程学院,泰安271018【正文语种】中文【中图分类】S224.22据联合国粮农组织统计,在其他生产因素不变的情况下,增施化肥可使农作物增产40%~60%。
我国的化肥用量一直处于世界第1位,化肥成本已占我国当前农业生产性支出的30%以上。
但我国化肥当季利用率普遍低于欧、美、日等发达国家,而这主要是由于我国农户多根据施肥经验采用“平均施肥”方式进行田间施肥[1]。
粗放施肥和过量偏施不仅浪费了资源,增加了农业生产成本,影响了农产品质量,而且未被作物吸收利用的化肥通过向大气挥发、向水体淋溶,造成了环境污染[2]。
国内配肥机械从人工称量发展到电脑自动计量,从混凝土搅拌机甚至人工搅拌发展到集配料、混料和包装的整机一体化。
变量施肥试验台的设计

1 变 量施肥 机械 现状 1 1 国外发 展现 状 . 、 美 国凯 斯公 司精 准农业 系 统 在世 界 上一 直 处 于
种子 或肥 料 的 比率 。可 完 成 多 种 作 物 的 作 业 , 玉 如 米、 大豆 、 麦 及 水 稻 等 。具 备 简 便 、 控制 、 确 、 小 易 精 可靠性高等优点 , 但价格昂贵, 成本较高。C s 公司 ae S 8 0型空 气 输 送 式 变 量 施 肥 播 种 机 j 施 肥 作 业 T2 ,
Absr t: oli s mp ra tr s u c fa rc lu a .e tl e si h tra a e t v lp n g tac S i samo ti o t n e o r e o g iu t r 1 f rii r St e mae i lb s ode e o i g a — z
r u u a. eo emoti o a tfcosfrtefr l e f c i frizree tr A rs n , ut g i h r 1On ft s mp r n a tr o e i zd ef t S e l e ico. tp ee tp t n c h t h t i e t i i
播种施肥机械实验报告(3篇)

第1篇一、实验目的1. 了解播种施肥机械的工作原理和结构特点。
2. 掌握播种施肥机械的操作方法。
3. 分析播种施肥机械的作业效果。
4. 为我国农业机械化发展提供理论依据。
二、实验材料1. 播种施肥机械:包括播种机、施肥机、输送带等。
2. 种子:小麦种子。
3. 肥料:尿素。
4. 土壤:沙壤土。
三、实验方法1. 实验步骤(1)组装播种施肥机械,确保各部件连接牢固。
(2)将种子和肥料按照一定比例混合,装入输送带。
(3)启动播种施肥机械,进行播种施肥作业。
(4)观察播种施肥机械的作业效果,记录相关数据。
(5)分析播种施肥机械的作业效果,提出改进意见。
2. 数据记录(1)播种量:每亩播种量。
(2)施肥量:每亩施肥量。
(3)播种均匀度:播种点间距的均匀性。
(4)施肥均匀度:施肥点间距的均匀性。
四、实验结果与分析1. 实验结果(1)播种量:每亩播种量为20kg。
(2)施肥量:每亩施肥量为10kg。
(3)播种均匀度:播种点间距均匀,误差小于5cm。
(4)施肥均匀度:施肥点间距均匀,误差小于5cm。
2. 分析(1)播种施肥机械的作业效果良好,播种均匀度、施肥均匀度均达到预期要求。
(2)播种施肥机械具有以下优点:①提高播种施肥效率,节省人力物力。
②实现播种施肥一体化,减少作业环节。
③播种施肥均匀,有利于作物生长。
(3)播种施肥机械存在以下不足:①对土壤适应性较差,易发生堵塞。
②结构复杂,维修难度较大。
③成本较高,推广应用受限。
五、实验结论1. 播种施肥机械在农业生产中具有重要作用,有利于提高播种施肥效率和质量。
2. 播种施肥机械在实际应用中存在一定问题,需进一步优化设计,提高适应性、可靠性和经济性。
3. 为推动我国农业机械化发展,应加大播种施肥机械的研发力度,提高其性能和推广应用水平。
六、实验建议1. 加强播种施肥机械的适应性研究,提高其在不同土壤条件下的作业性能。
2. 优化机械结构设计,提高机械的可靠性和维修性。
水平圆盘式撒肥部件的试验研究

为了能够简单方便的来测试撒施机的撒施分 布情况,人们又采用了一种静态测试模式— —切向圆柱式的撒肥模式,就是将撒施机固 定不动,用许多小盒子分布在撒施机周围接 收肥料,通过测量每个盒中肥料的质量来判 断肥料的撒施分布情况。
c,z m
zt
2.4 水平圆 盘式撒肥部 件的计算机
模拟
经过理论分析可知,有机肥质点脱离水平圆盘时的 撒肥速度如果已知,就可以建立数学模型,并可以 利用计算机进行仿真模拟,而影响的因素有以下四 个:叶片的偏心距p,叶片的半径r,有机肥颗粒位 于圆盘边缘时的绝对速度与此时圆盘直径间夹角φ 和有机肥颗粒位于圆盘边缘时径向与撒施机前进方 向间的夹角β,因此在计算机仿真模拟之前,需要 进行试验台的初步试验,确定以上各个参数。
撒肥盘的转 速
第一组叶片 的偏心距p1
第二组叶片 的偏心距p2
粪肥的含水 率
试验台设计 及均匀度测
试方法
水平圆盘式撒肥部 件试验台
前 进
1
方
向
2
ω
3
均匀度测试示意图 A
G
B C
F
E D
3.2 试验因 素水平的选定
在初步试验的基础上选取两组叶片,水平圆 盘的转速,有机肥的含水率,作为4个影响因 素,每个影响因素选取3个水平。
1
2
有机肥离开水平圆盘后的运动
分析
z x
前
进
方 向
y
φ ω
β
有机肥颗粒离开圆盘和叶片后 做平抛运动,若不考虑风及颗 粒自身的旋转的影响,可用以 下方程组表达其运动轨迹。
x ..
3c a 4d p
.
x
.2
x
.2
z
变量撒肥机设计参数研究及控制系统设计
sohu. com。
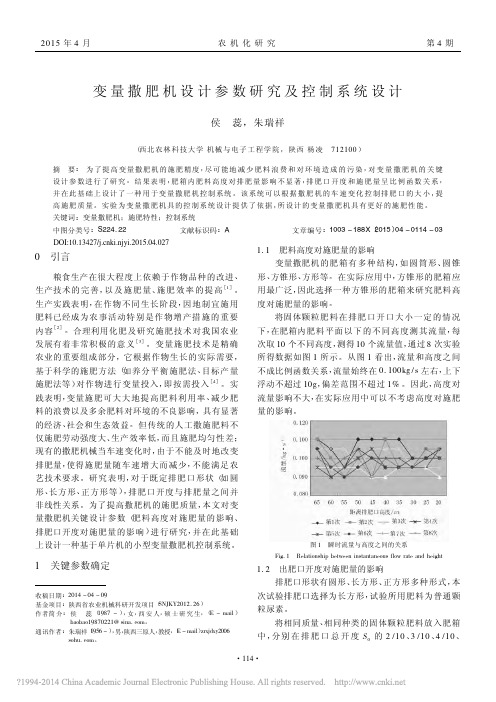
次试验排肥口选择为长方形,试验所用肥料为普通颗 粒尿素。
将相同质量 、相同 种 类 的 固 体 颗 粒 肥 料 放 入 肥 箱 中,分别 在 排 肥 口 总 开 度 S0 的 2 /10 、3 /10 、4 /10 、
图 1 瞬时流量与高度之间的关系 Fig. 1 Relationship between instantaneous flow rate and height
1. 2 出肥口开度对施肥量的影响
排肥口形状有圆 形 、长 方 形 、正 方 形 多 种 形 式 ,本
收稿日期: 2014 - 04 - 09 基金项目: 陕西省农业机械科研开发项目( SNJKY2012. 26) 作者简 介: 侯 蕊 ( 1987 - ) ,女,西 安 人,硕 士 研 究 生,( E - mail )
本设计以 C 语言为开发平台,开发变量施肥机控 制系统[6]。该系 统 可 根 据 车 速 的 变 化 而 改 变 施 肥 口
度对施肥量对施肥影响不大,在撒肥机设计中可以忽 略不计;但排 肥 口 开 度 对 施 肥 量 有 较 大 影 响,在 产 品
开度大小,并对不同施肥口开度施肥流量用所得修正 设计中应加以控制。
·115·
2015 年 4 月 器和比较器组成,应用电路如图 4 所示。
农机化研究
第4 期
图 4 行程和车速检测电路
Fig. 4 Distance and speed detection circuit
2. 2. 2 控制脉冲输出 由于步进电机的驱动电源具有功率放大电路和
肥料抛撒机颗粒肥料抛撒运动分析
2012年4月农机化研究第4期肥料抛撒机颗粒肥料抛撒运动分析张睿1,王秀1,孟志军1,自由蹿,陈立平1,翟长远3 (1.国家农业信息化工程技术研究中心。
北京100097;2.中国农业科学院,北京l O008l;3.西北农林科技大学,陕西杨凌712100)摘要:为探讨肥料抛撒机的撒肥性能,从理论上分析了颗粒肥料在撒肥盘和脱离撒肥盘后的运动机理和颗粒肥料脱离撤肥盘的条件,并通过分析颗粒肥料在撤肥盘和脱离撒肥盘后运动过程中的受力情况,建立了相应的运动方程,进一步得到了颗粒肥料离开撒肥盘时速度的函数关系以及颗粒抛撒幅宽的函数关系,可为肥料抛撤机设计优化和研究提供较好的参考。
关键词:肥料抛撒机构;颗粒肥料;运动分析中图分类号:s224.22文献标识码:A文章编号:1003—188×(2012)04—0054—040引言作为农业生产中调节土壤性状的重要手段,进行全层施肥是必不可少的环节。
目前,我国针对槽轮式小幅宽变量施肥机的研究探讨较多¨。
2j,但对于肥料抛撒机的研究还较缺乏【3。
J。
现有的外槽轮式等施肥机械存在作业效率较低等问题,而采用人工施肥不仅施肥效率低、费工、费时和劳动强度较大,且化肥的腐蚀作用对人的皮肤具有伤害。
在国外,该环节基本使用作业效率较高的圆盘抛撒机。
抛撒施肥机的研究怕。
81始于1962年,其针对肥料粒子在圆盘上的运动。
之后,研究者旧。
还对圆盘式变量施肥模型及田间试验等做了大量工作,并且能够基于处方图进行变量作业。
肥料抛撒机具有作业效率较高和撒肥均匀等特点,尤其在国有农场和农垦等大面积作业区域具有较广阔的应用前景。
然而,由于针对撒肥机性能的研究试验量大且较复杂,因此相关研究较少。
撒肥机构作为抛撒机重要的部件之一,直接影响到抛撒施肥的均匀性。
为此,本文对其初始半径、运动速度和抛撒幅宽等参数进行了较深入的探讨和分析,以求为肥料抛撒机的设计提供参考。
1肥料抛撒机构结构与工作原理本文所设计肥料抛撒机构主要由横梁、撒肥机构收稿日期:201l—08一08基金项目:北京市科委计划项日(D l O l l05046310003);精准农业智能关键装备技术引进与创新项目(20l l—G32)作者简介:张睿(1977一),男,山西临县人,博士研究生。
地轮驱动离心式化肥撒布机的设计与试验
2 2 月 0 年1 0
农 业 驱 动 离 心 式 化 肥 撒 布 机 的设 计 与试 验
宋卫堂 封 俊 刘 亚 佳
【 ■要】 设 计了一种 由地轮驱 动的离心式化 肥撤布 机 , 其撒 肥性能进 行了试 验 , 定 了撤 肥量 、 对 测 撒肥幅 宽 撤肥形状 、 撒肥均匀性 , 并进行了搭接撒施的均匀撤肥试验 , 该机与人工撤肥进行了比较 。结果表嘲 , 这种新型的地 轮驱动离心式化肥撒布机完垒能满足使用要求 。 瓤调 :离心式 化 肥撒 布机 设计 性 能试验
S n e a g F n u L uY j o gW i n e gJ n t i ai a
( ia Ag iu t r l Ch n rc lu a iest Un v ri y)
Ab t a t sr c
I h s p p r e c n rf g lt p f f r i z r b o d a t rd a y a t a t r o . 2 n t i a e .a n w e t i a y e o e tl e r a c s e r wn b r c o f 8 8 ~ u i
d ie r a c s e o m a u lo ea in r lo c r id o t Th etl i g q a t y c n b rv n b o d a trt n a p r t s we ea s a re u . o e f rizn u n i a e i t
c u d me t t e p a t ln e s i h i l s o l e h r c  ̄a e d n t e f d . e Ke o d Ce t iu a y e yw rs n rf g lt p ,F r i z r b o d a t r e tl r a c s e ,De i n,P ro ma c e t i e sg e f r n ets s
变量撒肥机肥料颗粒力学特性参数研究
变量撒肥机肥料颗粒力学特性参数研究
袁法晖;王琳;施印炎;汪小旵;王凤杰;刘慧
【期刊名称】《拖拉机与农用运输车》
【年(卷),期】2022(49)6
【摘要】为了确定离心式变量撒肥机离散元仿真所需的接触力学参数,利用离散单元法准确地模拟撒肥机撒肥作业过程和肥料颗粒运动规律。
通过对典型肥料的物理力学特性参数进行测定,建立颗粒肥料离散元仿真力学特性数据库。
为撒肥机的离散元仿真提供基础数据,从而为撒肥机构的设计提供依据。
【总页数】6页(P51-56)
【作者】袁法晖;王琳;施印炎;汪小旵;王凤杰;刘慧
【作者单位】南京农业大学工学院;拖拉机动力系统国家重点实验室
【正文语种】中文
【中图分类】S224.22
【相关文献】
1.变量撒肥机设计参数研究及控制系统设计
2.变量施肥抛撒机撒肥机构研究
3.SF-100摆动式颗粒肥料抛撒肥机的研究设计
4.SF-100摆动式颗粒肥料抛撒肥机的工作原理与使用维护
5.Can Africa Learn From China’s Anti-Epidemic Measures?
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Fig.5
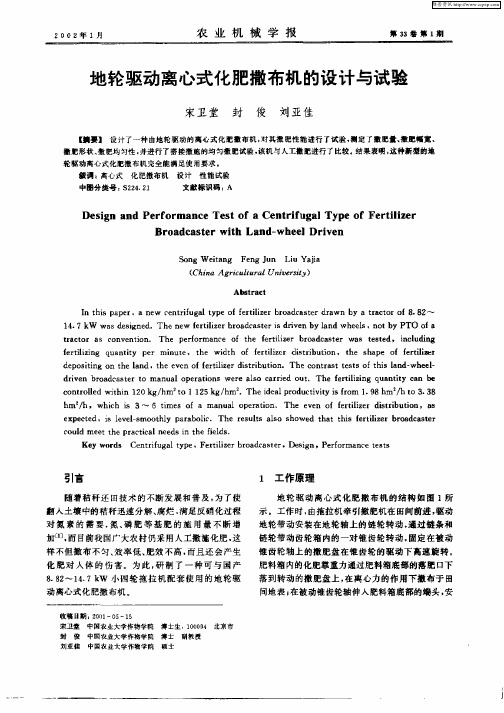
图 5 肥料颗粒沿拨肥叶片运动时的受力图 Force diagram during fertilizer granular moving along spread manure vane
22
农业工程学报
2012 年
根据分析,该肥料颗粒主要受力有重力、离心力、 惯性力、科里奥利力以及与圆盘和叶片间的摩擦力,这 里圆盘与叶片材料相同,因此摩擦系数相同。 如图 5 所示,当肥料颗粒从落肥口落到以角速度 ω 旋转的圆盘上时,肥料颗粒离圆盘圆心 O 距离为 r0,圆 盘的半径为 R, 当质量为 m 的肥料颗粒运动到距离圆心 O 为 r(m)时,假设当该肥料颗粒运动 dr,所用时间 dt, 由牛顿定律可得 F Fce Ff (2)
外形尺寸 (长×宽×高) / mm×mm×mm 4 400×2 170×2 070 肥箱 最大工 肥门 圆盘 链条转速 排肥 撒肥 容量/ 作幅宽 开度 直径 -1 /(r·min ) 方式 盘 m3 /m /mm /mm 链条 双圆 3.15 20 0~150 0~120 500 输送 盘
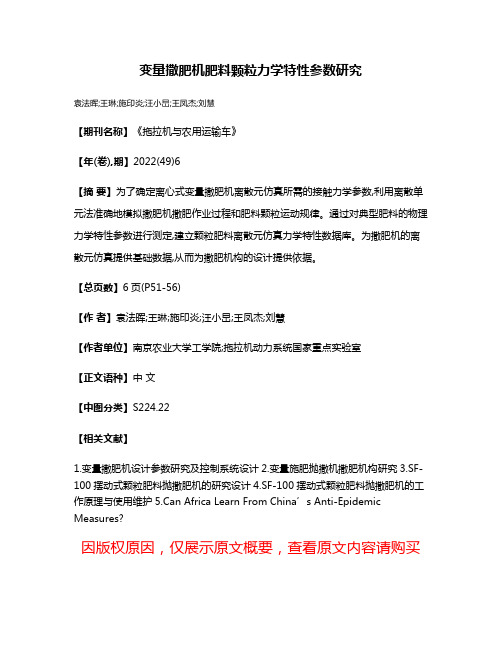
2.2 撒肥盘机构 撒肥盘是抛撒机重要的部件之一,直接影响到抛撒 施肥的均匀性。在肥料抛撒作业过程中,当肥料从落肥 口落到旋转的圆盘上时,由于旋转圆盘产生的离心力以 及肥料和圆盘间的摩擦力作用,使肥料在圆盘以及沿拨 肥叶片上经过滑动或滚动,最终通过叶片抛撒出去。 为方便分析肥料抛撒过程,假设作业过程中圆盘旋 转角速度 ω 保持恒定不变,落肥口与圆盘距离很近,肥 料束流入撒肥盘,所以忽略肥料落入圆盘产生的反弹, 忽略肥料间产生的相互作用力。 如图 4 所示,拨肥叶片安装偏置角为 0,以一个肥料 颗粒为研究对象,设该肥料颗粒质量为 m,在离心力作 用下沿撒肥盘的拨肥叶片向外运动,此过程中,该肥料 颗粒在拨肥叶片上受力如图 5 所示。
注:ω 为圆盘旋转角速度,rad/s;r0 为初始半径,mm;R 为圆盘半径,mm; θ 为肥料脱离角,rad;v 为肥料离开圆盘时速度,m/s,t 为肥料颗粒运动到 距圆盘中心 r 时所用时间, s; r 为 t 时刻肥料颗粒距离圆盘中心的距离, mm。 1. 肥料束落入圆盘区域 2. 撒肥盘(右) 3. 拨肥叶片 4.肥料颗粒
注:a 为链条小边宽,mm;b 为链条长边宽,mm;p 为链条节距,mm。 1. 穿销 2. 链节 3. 锁母
Fig.2
图 2 输送链条的结构图 Structure diagram of conveyor chain
考虑肥料颗粒尺寸、负荷、加工工艺以及设计,输 送链条采用 (厚×宽) 1 mm×12 mm 不锈钢片折压而成, 链 节 距 p=25.7 mm , 链 条 小 边 a=15 mm , 长 边 b=27.4 mm,链条宽 330 mm。 对于输送链条机构主要由链轮、链轮轴和网格链组 成,2 个主(从)动链轮固定链轮轴两端,并与网格链两 端的网格啮合。图 3 为链条输肥机构简图。 输送肥料机构的动力由液压马达提供,液压马达通 过柔性联轴器与链轮轴连接。该排肥机构在链轮旋转 1 周的排肥量 q 为 q πdWh (1) 式中,q 为链轮旋转一周排肥量,kg/r;d 为驱动链轮直 径,m;W 为肥门开口宽度,m;h 为肥门开口高度,m; ρ 为肥料体积质量,kg/m3。
1. 链轮 2. 链条
3.“V”型撑肥机构 4. 肥门
5. 肥料 6. 肥箱
Fig.3
图 3 链条输肥机构 Mechanism of deliver manure of conveyor chain
1. 横梁 2. 下肥口 3. 转速传感器 4. 链条 5. 肥门 6. 肥箱加强筋 7. 肥箱 8. 位移传感器 9. 监控器 10. 电动推拉杆 11. 撑肥部件固定 梁 12. 撑肥部件 13. 液压控制阀 14. 排肥马达 15. 撒肥盘和叶片 16. 行走轮 17. 撒肥盘马达 18. 撒肥盘马达固定梁
2.1 链条输送式排肥机构 为使肥料颗粒尽可能定量地输出到排肥口,肥料输 送链条采用了马蹄链结构,由扁金属片和圆金属销组成, 通过彼此相扣形成排式的网格结构(如图 2),在链条的 下方与输送链紧贴并固定有肥料托板,由此肥料颗粒便
第6期
张
睿等:链条输送式变量施肥抛撒机的设计与试验
21
可以通过网格结构链条将肥料从肥箱输送到排肥口。
Ff Ff 1 Ff 2 ( Fg Fco ) Fg m g
由此,可求得肥料颗粒离开圆盘时的绝对速度 v(m/s)为
v vt2 R
2
(15)
(3) (4) (5) (6)
Fce m r
2
Fi m
d r dt 2
2
Fco 2 m
1
结构与工作原理
链条输送式变量施肥抛撒机主要由横梁、下肥口, 转速传感器、链条、肥门、肥箱加强筋、肥箱、位移传 感器、监控器、电动推拉杆、撑肥部件固定梁、撑肥部 件、液压控制阀、排肥马达、行走轮、撒肥盘和叶片、 撒肥盘马达及固定梁等组成(如图 1 所示)。 作业中,链条输送式变量施肥抛撒机由拖拉机牵引, 通过 GPS 定位,当施肥控制系统接收到所处位置基于处 方图的施肥量信息后,通过安装在输肥链轴上测速传感 器测得输肥链条转速,结合速度传感器测得的机具作业 速度,从而控制驱动输肥链的液压马达转速,实现系统 变量施肥作业。主要技术参数如表 1 所示。
※
(1. 国家农业信息化工程技术研究中心,北京 100097;
2. 中国农业科学院农业资源与农业区划研究所,北京 100081)
摘 要:针对国内变量施肥机作业幅宽小,变量施肥抛撒机缺乏的问题,该文应用变量施肥技术,设计了一种基于处方 图的链条输送式变量施肥抛撒机。通过分析肥料颗粒在撒肥盘上的运动和受力,建立了肥料颗粒在脱离撒肥机圆盘过程 中的运动方程,设计并确定了变量抛撒控制系统、肥箱、肥门自动开启装置等关键部件的结构及参数。并进行了不同施 肥量和抛撒均匀性的试验,结果表明:链条输送式变量施肥抛撒机变量效果较好,且具有较好的抛撒均匀性,在拖拉机 速度 1.5 m/s,实际施肥量与预置施肥量相对误差最大值为 7.53%;拖拉机速度 2 m/s,目标施肥量 225 kg/hm2,抛撒幅宽 设定 30 m,有效幅宽抛撒变异系数为 14.90%,能够较好的满足实际生产要求。 关键词:试验,农业机械,结构,变量施肥,链条输送,肥料抛撒机 doi:10.3969/j.issn.1002-6819.2012.06.004 中图分类号:S224.2 文献标志码:A 文章编号:1002-6819(2012)-06-0020-06 张 睿,王 秀,赵春江,等. 链条输送式变量施肥抛撒机的设计与试验[J]. 农业工程学报,2012,28(6):20-25. Zhang Rui, Wang Xiu, Zhao Chunjiang, et al. Design and experiment of variable rate fertilizer spreader with conveyor chain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(6): 20-25. (in Chinese with English abstract)
dr dt dr dt
(7) (8) (9)
Ff 1 Fco 2 m
Ff 2 m g
式(2)~(9)中,F 为该肥料颗粒所受合力,N;Fce 为肥 料颗粒所受离心力,N;Ff 为肥料颗粒所受摩擦力,N;Ff1 为肥料颗粒与拨肥叶片之间摩擦力,N;Ff2 为肥料颗粒与 撒肥盘之间摩擦力,N;Fg 为肥料颗粒所受重力,N;g 为 重力加速度,m/s2;Fi 为肥料颗粒所受惯性力,N;Fco 为肥 料颗粒所受科里奥利力,N;μ 为摩擦系数。 将式(3)~(9)代入式(2),整理可得微分方程
Fig.1
图 1 变量抛撒施肥机结构简图 Structure diagram of variable rate fertilizer spreader
表 1 链条输送式变量施肥抛撒机主要技术参数 Table 1 Main technical parameters of variable rate fertilizer spreader with conveyor chain
ห้องสมุดไป่ตู้
0
引
言
变量施肥技术是精准农业一个重要组成部分, 而变 量施肥机则是精准施肥最主要的实施手段。 对于农业生 产, 为调节土壤性状, 进行全层施肥是必不可少的环节。 目前, 中国已有较多针对槽轮式小幅宽变量施肥机的研 究, 王秀等根据田间土壤肥料不一致研制了一种基于处 方图作业的变量施肥机 [1];孟志军等基于 PC104 CPU 模块设计了机载作业终端, 通过电液比例阀控制液压马 达系统,设计了基于处方图的变量施肥作业系统 [2];付 卫强等开发了一种基于 CAN( controller area network) 耿向宇等基于 GPRS(general 总线变量施肥控制系统 [3]; packet radio service)进行了变量施肥机系统的研究 [4]。 对于肥料抛撒的研究, 秦朝民等针对离心式撒肥机推肥 板在撒肥盘上的布置进行了分析和研究 [5]; 宋卫堂等设 计了一种通过地轮驱动撒肥盘旋转的撒肥机 [6]; 吴辉针 对国外圆盘式施肥机进行了相关的抛撒试验及撒肥规 律研究 [7]。 然而所针对研究的肥料抛撒机主要是面向平 均施肥, 对于能够实现变量作业的肥料抛撒机方面研究 缺乏。 在国外,该环节基本使用作业效率较高的圆盘抛 撒机。而国外对于施肥抛撒机的研究,早在 1962 年就 针对肥料粒子在圆盘上的运动开始 [5-8] 。之后,许多研
Fig.4
图 4 肥料颗粒在撒肥盘抛出时刻的运动分析 Motion analysis of fertilizer granular at moment of thrown from disc border