雷达自动频率控制系统的设计
基于DDS的雷达中频信号模拟器设计

引言雷达中频信号模拟器在雷达领域具有广泛的应用,可以用作频率合成器的重要组成部分,还可以作为调试检测时的模拟雷达中频回波信号的生成。
直接数字合成技术(Direct Digital Frequency Synthesis)产生于上世纪七十年代初,与传统频率合成技术相比,DDS技术具有高的输出频率分辨率、高精度、低相噪、切换频率时保持相位连续等优点[1-6]。
传统的直接频率合成和锁相频率合成(PLL)已不能满足现代雷达频率捷变、波形参数捷变等快速跳频的需求[7]。
DDS技术是一种全数字技术[2-4],为满足现在雷达所需信号的要求,频率合成就是用一个高稳定度与高标准度的标准频率源作为参考,通过对该频率进行各项运算和滤波后得到相同稳定度和准确度的不同的频率信号,作为雷达发射的基准频率。
中频信号模拟器作为辅助调试检测雷达使用时,需要对雷达接收到的回波信号进行模拟,产生相同频率的雷达回波信号便于整个接收通道的检查,可以辅助雷达完成距离零位标定、角度零位标定、相位补偿等各项工作。
1 DDS基本工作原理图1是DDS的工作原理框图[6],在DDS内核中作为DDS的系统时钟,N位全加器对频率控制字F和相位寄存器的N位输出值进行叠加运算[2][4],相位寄存器后信号流向分为两路,主路与相位控制字P通过加法器再次叠加运算后生成D位的ROM表寻址地址码,通过该寻址码在ROM查找表中找出当前频率控制字F和相位控制字P所对应离散波形幅度值数据;反馈路的信号等待下一个时钟信号与下周期的频率控制字F继续叠加,实时更新。
当前系统时钟周期结束后,离散的波形幅度值数据构成了离散输出信号的波形,在DDS内核外幅度控制字A控制乘法器对输出信号的幅度值进行选取,后经DAC及低通滤波器组对信号进行D/A变换和滤波最终得到实际需要的波形信号fout。
2 中频信号模拟器的系统设计及实现2.1 核心器件的选型及主要功能DDS芯片选用成都振芯公司的GM4940,该芯片包含32位频率控制字F,16位相位控制字P,10位幅度控制字A,同时支持单点频、FSK、PSK、OSK、RAMP、混频、扫频等多种操作模式。
浅谈雷达伺服系统的设计
270理论研究浅谈雷达伺服系统的设计石小萍,刘兴兴,陈 丁(西安黄河机电有限公司设计研究所,西安 710043)摘 要:本文介绍了雷达伺服系统的主要作用,以及雷达中常用的传动机构、驱动元件、位置检测装置的工作原理、主要性能和设计及选用方法,最后介绍了雷达伺服系统装置的性能参数检测方法。
关键词:伺服系统;执行机构;位置检测;误差分析;驱动电机1 引言 伺服系统是控制雷达位置及各种运动参数的电子设备,是典型的机电自动控制技术。
“伺服系统”实际上是控制天线机械传动系统按设定的运动规律,去自动地转动天线去捕获、跟踪目标或使天线转动到某位置。
伺服系统也被称为“随动系统”。
伺服系统与其他控制系统的区别是被控制的输出量是机械位移(角位移)、速度(角速度)或加速度(角加速度)。
给定的输入量往往是小功率的信号。
2 伺服系统的设计 进行伺服系统的设计及分析时,一般采用图解法可以清楚地表明伺服系统的构成,各部分之间的相互关系,及其信号传递情况的系统方框图称为伺服系统的方框图,通常把某种功能的伺服系统称为“伺服回路”。
常规产品一般有速度回路、位置回路、稳定回路等等。
通过过方框图介绍了伺服系统中有关机电信息相互转换的主要通道,以及执行元件和位置检测元件的功能和设计要求。
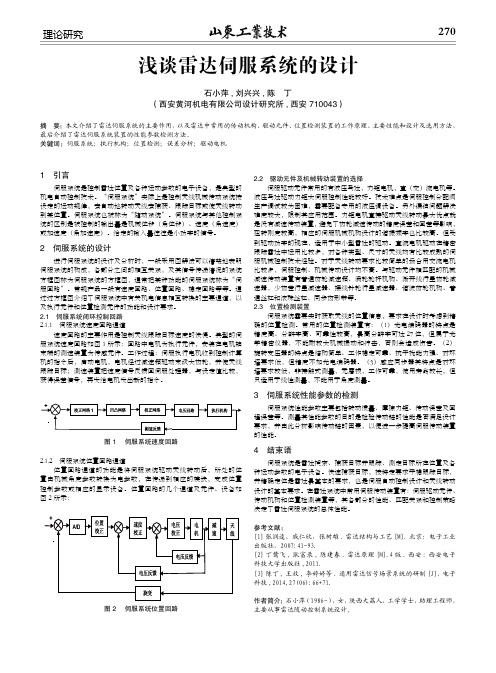
2.1 伺服系统闭环控制回路2.1.1 伺服系统速度回路通道 速度回路的主要作用是控制天线跟踪目标速度的快慢。
典型的伺服系统速度回路如图1所示:回路中电机为执行元件,安装在电机轴末端的测速装置为传感元件。
工作过程:伺服执行电机收到控制计算机的指令后,启动电机,电机经过减速箱驱动末级大齿轮,并使天线跟踪目标;测速装置把速度信号反馈回伺服处理器,与设定值比较,获得误差信号,再发给电机发出新的指令。
2.2 驱动元件及机械转动装置的选择 伺服驱动元件常用的有液压马达,力矩电机,直(交)流电机等。
液压马达驱动力矩大伺服控制性能较好。
技术难点是伺服控制分配阀生产调试较为困难,需要配备专用的液压调设备。
机电式雷达自动调平系统设计

机电式自动调平系统设计摘要:本文介绍了一种针对一机动雷达天线车自动调平系统的设计,该系统采用伺服电机作驱动源,通过减速器带动丝杆伸缩推动千斤顶动作,以水平传感器测取天线车倾斜信息,自动调平处理器以一单片机为核心,接收传感器信息判断并发出信号,控制相应调平腿动作直到天线车水平。
该系统实验证明,其调平精度及时间均能满足雷达整机的要求。
关键词:机电式PWM 自动调平1 引言随着现代战争中飞机、导弹等空中进攻性武器性能的快速发展,使军用地面雷达面临严峻挑战,在不断追求功能完善、性能先进、工作可靠的同时,对雷达的机动性提出了更高的要求。
近几年来,为使雷达做到快速架设投入战斗、迅速拆收转移阵地,在设计时对以前许多由人工完成的动作都采用了自动控制完成,如雷达的架设、拆收、方位标定、调平等,本文介绍了一种雷达天线车的自动调平系统的设计。
雷达天线车自动调平系统是机、电设计紧密结合的一体化自动控制系统,一般包括执行、控制、传感等部分。
由于执行机构采用的驱动方式不同又可分成两大类,一种采用液压作为驱动源,称为机电液一体化系统,另一种采用电机产生原动力,通过减速器驱动丝杆动作,称为机电一体化系统。
本文介绍的自动调平系统是一种机电一体化系统。
2 系统简介本系统是针对一新型雷达进行设计的,该雷达进行高度的集成化设计,雷达天线、发射机、接收机、信号处理等均安装于一机动车的平台上,雷达天线采用轻型的双弯曲抛物面天线,工作时必须将天线车调平才能保证雷达的测量精度。
天线车的总重约18000公斤,有四只机电调平腿,调平腿工作时的跨距约为5×2.3米,调平过程中每只千斤顶载荷约8000公斤,静态载荷约12000公斤,千斤顶行程为500mm,具有自锁功能。
雷达系统对天线车自动调平的主要技术指标为:1、调平时间不大于3分钟2、调平精度,任意方向小于6¹本系统是机电一体化系统,调平执行机构采用交流伺服电机通过摆线减速器驱动梯形丝杆千斤顶来完成天线车四个支撑腿的升降,采用倾斜传感器来测取天线车纵轴与横轴的倾斜角,倾斜信号输入控制箱内微处理电路,对数据分析判断后分别输出脉冲串去驱动四路交流电机运转,从而控制调平执行机构对天线车调平。
雷达伺服系统设计与仿真
雷达伺服系统设计与仿真作者:陈静来源:《城市建设理论研究》2013年第29期摘要:雷达伺服系统是自动控制理论的典型应用,本文主要介绍了雷达伺服系统的论证、设计过程和方法,阐述了以传递函数为基础的经典控制理论和现代控制理论,基于对雷达伺服系统的设计研究,对伺服系统进行仿真和性能评估,总结了分析和提高伺服系统性能的方法。
关键词:伺服系统设计过程仿真和性能评估控制理论中图分类号:TN95 文献标识码:A伺服系统设计伺服系统的设计方法通常有时间响应分析方法、根轨迹法和频率响应分析法三种。
伺服系统设计的主要技术指标有:工作范围、稳定性、过渡过程品质、系统精度、动态响应能力等。
我们在实际应用过程中,可以分静态设计和动态设计两步进行,这里主要阐述动态设计。
伺服系统动态性能指标伺服系统的动态设计的目的是通过选择适当的控制算法,以使系统的闭环特性满足伺服系统的主要性能指标:稳定裕量。
伺服带宽和过渡过程品质、系统截至频率跟踪误差。
结构谐振特性。
机械传动间隙。
在实际雷达伺服系统中,采用最优控制尽可能的缩短伺服系统的过渡时间,由于最优控制基于的被控对象模型不准确,对框架角速度估计又存在误差,而PID控制对于稳态控制更占优势,因此,实际天线伺服控制中需要采用集成控制策略将最优控制器与经典PID控制器有机结合起来。
控制器交接策略:当小范围稳定时采用PID控制;大角度范围转移时采用了最优控制。
伺服系统固有环节伺服系统的固有环节主要是指执行元件及其负载,当执行元件及其负载的传递函数的输入是功率放大器的输入电压,输出是天线轴上的转角。
通常我们用动态分析仪来测试伺服系统固有环节的频率特性,通过Matlab对测得的数据进行频率特性分析。
得到系统固有环节传递函数:其中:为开环增益;为转折时间,为自然频率;为阻尼比经典PID控制设计系统模型建立伺服系统固有环节为“积分+一阶惯性+二阶振荡”形式,为保证系统的指令跟踪精度,控制器采用“一阶滞后超前+PI”形式。
雷达接收机相位鉴频器的设计
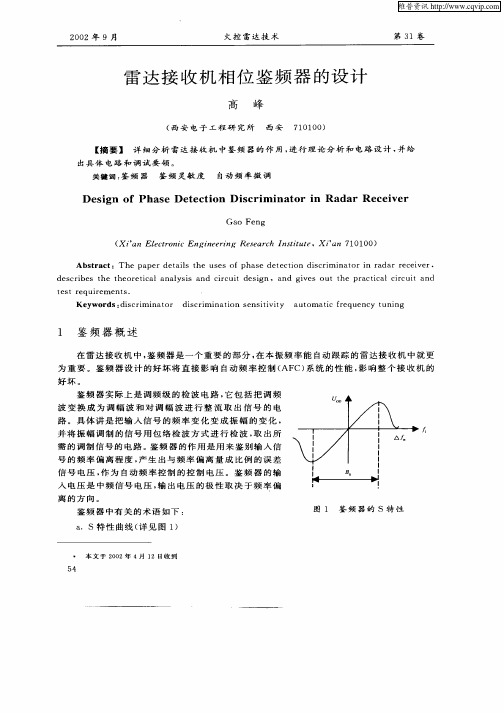
图 2 AFC 系 统 原 理 框 图
2鉴 频 器 的 种 类 及 理 论 分 析
2 1 斜 率 鉴 频 器 .
利 用 输 入 信 号 的 中心 频 率 ( 即载 波 频 率 ) 工 作 在 I 并 联 谐 振 电 路 谐 振 曲 线 的倾 斜 部 分 , , C 就 可 以用 调 频 信 号 变 成 调 幅信 号 的 原 理 来 实 现 检 波 。特 点是 电路 简单 , 频 带 不 宽 , 性 要 求 但 线
好坏 。
鉴 频 器 实 际 上 是 调 频 级 的 检 波 电路 , 包 括 把 调 频 它 波 变 换 成 为 调 幅 波 和 对 调 幅 波 进 行 整 流 取 出 信 号 的 电
uo .
路 。具 体 讲 是 把 输 入 信 号 的 频 率 变 化 变 成 振 幅 的 变 化 , 并 将 振 幅 调 制 的 信 号 用 包 络 检 波 方 式 进 行 检 波 , 出所 取 需 的 调 制 信 号 的 电路 。鉴 频 器 的 作 用 是 用 来 鉴 别 输 入 信
t s e e t r qui em e s r nt .
Ke ywo ds: s r m i at r dic i i ton s ns tv t au om a i r que y t r dic i n o s r m na i e ii iy t tc f e nc uni ng
C .鉴 频 灵 敏 度
鉴 频 器 正 常 工 作 所 需 的输 入 调 频 波 的幅 度 , 值 越 小 鉴 频 灵 敏 度 越 高 。 其 d .鉴 频 频 带 带 宽 图 1鉴 频 器 的 S特 性 曲线 中 2 f 为 频 带 宽 度 , 般 要 求 2 f 大 于 输 入 调 频 波 频 偏 两 △ m 一 △ m
高速铁路雷达系统设计与性能分析
高速铁路雷达系统设计与性能分析随着现代交通技术的发展,高速铁路的建设和使用已经成为许多国家的优先发展项目。
为了确保高速铁路的运营安全和效率,高速铁路雷达系统设计和性能分析便显得尤为重要。
本文将就高速铁路雷达系统的设计原理、性能指标以及分析方法进行讨论,并提出一种基于雷达的高速铁路系统设计方案。
高速铁路雷达系统的设计原理是基于微波雷达技术,通过发射和接收微波信号来监测铁路线路上行驶的列车。
雷达系统主要由发射器、接收器、信号处理模块和控制模块组成。
发射器产生并发射微波信号,而接收器接收并处理返回的微波信号。
信号处理模块负责对返回信号进行处理和分析,从而提取有用信息。
控制模块用于控制雷达系统的运行和参数设置。
高速铁路雷达系统的设计需要考虑多个性能指标。
首先是雷达的探测距离和角度分辨率。
探测距离决定了雷达系统能够监测的范围,而角度分辨率则决定了雷达能够检测到的目标的精确位置。
其次是雷达的工作频率和脉宽。
工作频率影响着雷达信号在空间中的传播特性,脉宽则决定了雷达信号的时域特性。
此外,雷达的灵敏度和动态范围也是需要考虑的指标。
灵敏度决定了雷达系统对微弱信号的检测能力,而动态范围则决定了雷达系统在强信号存在的情况下的工作能力。
进行高速铁路雷达系统的性能分析时,可以采用多种方法。
首先是理论模拟和仿真。
通过建立雷达系统的数学模型,并运用数值计算的方法进行仿真,可以评估雷达系统在不同条件下的性能表现。
其次是实验测试。
利用实际设备进行测试,可以获取真实的性能数据。
通过对比实际测试数据和理论仿真结果,可以验证模型的准确性,并进一步优化设计方案。
此外,可以采用统计分析方法,从大量数据中提取有效信息,以评估和改进雷达系统的性能。
基于以上原理和分析方法,提出一种高速铁路雷达系统设计方案。
该方案采用多波束雷达技术,即在径向和方位上配置多个发射和接收波束,以提高雷达系统的探测精度和灵敏性。
同时,方案中采用自适应信号处理算法,实时对接收到的多波束信号进行处理和分析,从而提取有用信息。
浅谈频率步进雷达及其系统实现
浅谈频率步进雷达及其系统实现作者:张炜来源:《中小企业管理与科技·下旬刊》2015年第05期摘要:目前越来越多的宽频带雷达投入到空管监视领域,一次雷达经常采用CHIRP技术实现远距离探测并提高距离分辨率。
采用合成技术,将一串窄带脉冲合成大带宽信号从而实现高分辨力,该信号以波形易于生成、对接收机带宽要求低、ADC采样率容易满足等优点成为复杂目标探测的主要信号形式。
因此频率步进信号在新体制雷达中将会占有重要的位置,具有非常重要的意义。
关键词:频率步进信号1 频率步进信号理论采用矩形子脉冲合成频率进步信号是比较典型的做法,当频率进步信号的合成带宽一定时,其距离分辨率也就决定了,而矩形子脉冲模式下,脉冲重复频率决定了雷达的不模糊作用距离,重复频率越高,不模糊距离越大,相应数据率就很低,反之数据率就会很高,因此矩形脉冲的数据率与不模糊作用距离就成了一对矛盾。
用CHIRP子脉冲代替矩形脉冲,可以解决数据率与作用距离的关系,子脉冲为CHIRP的频率步进信号称为调频步进信号。
2 调频频率步进信号处理流程对于调频步进信号处理,首先要进行子脉冲匹配滤波得到压缩后的窄脉冲,其次对窄脉冲作脉间IFFT处理。
调频步进高分辨处理成像。
上述关于调频步进信号处理的方法是在目标静止的前提下,实际目标经常是运动的,其处理方法也会有所不同。
3 宽带频率步进雷达系统的设计3.1 参数设计本文参考CAMBER雷达的设计方法,采用脉冲压缩比为320的线性调频信号,脉冲宽度20微秒,占空比20%,重复频率10K。
权衡系统的各方面性能及同时能满足所需的距离分辨率要求(0.3米),信号的合成带宽定为1024M赫兹,调频点设计为128个,子脉冲带宽16M 赫兹。
3.2 系统总体组成及部件设计3.2.1 频率综合器设计频率综合器主要实现宽频带雷达信号的产生,包括中频信号生成和射频信号生成两个部分。
其中中频信号的产生采用直接数字频率合成原理(DDS),射频段则采用倍频器和混频器实现。
一种新体制的高频地波雷达设计与实现
雷达科学与技术Radar Science and Technology第1期2021年2月Vol. 19 No. 1February 2021DOI : 10. 3969/j. issn. 1672-2337. 2021. 01. 006一种新体制的高频地波雷达设计与实现杨钊,吴雄斌,张兰(武汉大学电子信息学院,湖北武汉430072)摘要:传统高频地波雷达接收机与天线阵列由长电缆连接,存在成本高、架设难、不易维护等问题。
本文提出了 一种新体制的高频地波雷达系统,该系统将多通道接收机分为多个装配在接收机天线附近的独立的单通道接收单元,接收单元与天线之间采用短电缆连接模式,各个接收单元之间通过GPS/北斗进行 时钟同步,通过无线方式进行参数配置和数据传输。
在完成单通道接收单元设计与实现后,通过闭环实验和海边现场实验对整个新系统进行了检测,得到了稳定的海洋回波,证明了新体制雷达系统的可行性。
关键词:地波雷达;无线传输;新体制;单通道接收单元中图分类号:TN95& 93文献标志码:A 文章编号:1672-2337(2021)01-0035-05Design and Implementation of a New HF Ground Wave RadarYANG Zhao, WU Xiongbin, ZHANG Lan{School of Electronic Information ?Wuhan University j Wuhan 430072, China)Abstract : The receiver of the traditional high frequency (HF) surface wave radar (SWR) was usually con nected with the receiving array by long cables, which may increase the cost and difficulty of the installation and maintenance for the radar system. A novel HF SWR system is introduced in this paper. The receiving module of this system composes of several independent single-channel receiving units mounted near the receiving antennas, and a short cable connection mode is used between the receiving unit and the antenna. The clock synchronization between each receiving unit is realized through GPS/BDS )and parameter configuration, and data transition for the radar system are achieved through wireless transmission. The new radar system has been checked through the closed-loop experiments and field experiments and has received stable sea echoes 5 which demonstrates the feasi bility of the proposed radar system.Key words : ground wave radar ; wireless transmission ; new system ; single channel receiving unit0引言高频地波雷达可以实现对视距外海洋状态和海上目标的大范围、高精度和全天候的实时监 测m ,因此,高频地波雷达在海洋监测和国防等领 域具有独特的应用前景和优势,成为了立体化海洋信息监测的重要工具之一。
相控阵雷达系统的设计与实现

相控阵雷达系统的设计与实现近年来,相控阵雷达技术在国防、航空、航天等领域得到了广泛应用。
这种基于数字信号处理的雷达系统,可以通过控制阵元的相位和振幅,实现信号的形成和空间选择性的波束的旋转和电子扫描。
相对于传统的机械扫描雷达系统,相控阵雷达系统具有更高的目标探测、跟踪、分类和识别的能力、更快的响应速度、更广阔的探测范围等优势。
本文将介绍相控阵雷达系统的设计原理、技术指标和实现方法。
一、相控阵雷达系统的原理相控阵雷达系统由发射端和接收端两部分组成。
发射端通过相位和振幅控制阵元,将电磁波按照特定的相位和振幅发射,形成一个前沿斜面的波束。
接收端阵元接收回波信号,经过放大、滤波、混频、数字化等处理后,送入信号处理单元进行处理。
信号处理单元对接收到的多个波达进行相位和振幅的控制,形成反向波束,与前向波束合成,实现目标的方位角驻留和距离测量,从而确定目标的空间位置和运动状态。
二、相控阵雷达系统的技术指标相控阵雷达系统的性能指标主要包括探测距离、探测角度、探测精度、重复频率、带宽、增益、方向图等。
探测距离取决于雷达发射功率、天线高度和目标反射截面积等因素,一般为几百公里到千公里。
探测角度为雷达波束的宽度,一般为几度到十几度,与天线孔径和波长相关。
探测精度由雷达发射波形、接收滤波器带宽、信号处理算法等因素共同决定,一般在米级别。
重复频率为雷达发射脉冲频率,一般为几百赫兹到几千赫兹。
带宽为雷达脉冲的频带宽度,一般为几百兆赫兹到几千兆赫兹。
增益为雷达系统接收信号的增益,与天线增益、前置放大器增益等因素有关。
方向图为雷达天线在空间中的响应特性,与天线孔径的大小以及阵元排列方式相关。
三、相控阵雷达系统的实现方法相控阵雷达系统的实现方法主要包括阵元设计、天线阵列布局、发射电路、接收电路、信号处理算法等方面。
阵元设计是确定天线阵列参数的前提,它包括天线元的尺寸、频率响应、阻抗匹配等因素。
天线阵列布局是确定阵元排列方式的关键,不同的布局方式对雷达系统性能有很大的影响。
雷达的工程设计方案
雷达的工程设计方案一、引言雷达技术是现代通信和导航系统中不可或缺的组成部分。
雷达主要用于探测、跟踪和识别远距离目标,其应用领域涵盖军事、民用航空、气象预报、海上监测等多个领域。
随着科技的发展,雷达系统也在不断进行创新和升级,以满足日益增长的需求。
本文将详细介绍一种雷达的工程设计方案,包括系统架构、技术规格、主要构成部分、测试方法等内容,以期为雷达系统的设计和应用提供一定的参考。
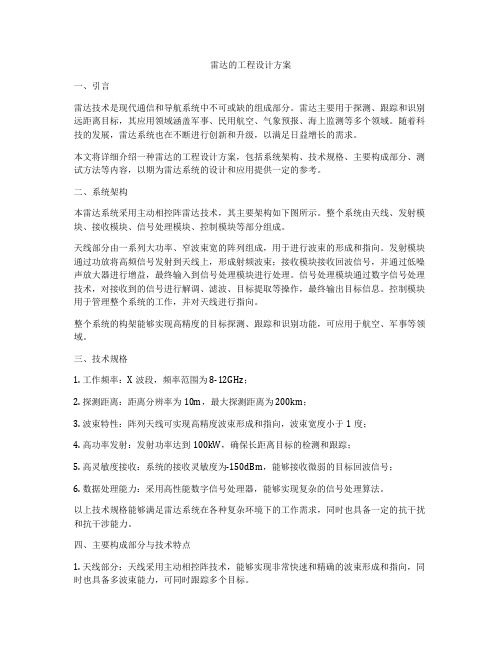
二、系统架构本雷达系统采用主动相控阵雷达技术,其主要架构如下图所示。
整个系统由天线、发射模块、接收模块、信号处理模块、控制模块等部分组成。
天线部分由一系列大功率、窄波束宽的阵列组成,用于进行波束的形成和指向。
发射模块通过功放将高频信号发射到天线上,形成射频波束;接收模块接收回波信号,并通过低噪声放大器进行增益,最终输入到信号处理模块进行处理。
信号处理模块通过数字信号处理技术,对接收到的信号进行解调、滤波、目标提取等操作,最终输出目标信息。
控制模块用于管理整个系统的工作,并对天线进行指向。
整个系统的构架能够实现高精度的目标探测、跟踪和识别功能,可应用于航空、军事等领域。
三、技术规格1. 工作频率:X波段,频率范围为8-12GHz;2. 探测距离:距离分辨率为10m,最大探测距离为200km;3. 波束特性:阵列天线可实现高精度波束形成和指向,波束宽度小于1度;4. 高功率发射:发射功率达到100kW,确保长距离目标的检测和跟踪;5. 高灵敏度接收:系统的接收灵敏度为-150dBm,能够接收微弱的目标回波信号;6. 数据处理能力:采用高性能数字信号处理器,能够实现复杂的信号处理算法。
以上技术规格能够满足雷达系统在各种复杂环境下的工作需求,同时也具备一定的抗干扰和抗干涉能力。
四、主要构成部分与技术特点1. 天线部分:天线采用主动相控阵技术,能够实现非常快速和精确的波束形成和指向,同时也具备多波束能力,可同时跟踪多个目标。
2. 发射模块:发射模块采用高功率双向功放技术,能够输出高功率和稳定的射频信号,确保长距离目标的探测和跟踪。
AFC系统的设计
AFC系统的设计柴俊【摘要】提出了一种基于鉴相器的自动频率控制(AFC)系统,使用移相网络和鉴相器实现鉴频特性曲线,将各种因素造成的频率偏差转化为符号函数,结合频率合成技术,从而形成一种宽频率跟踪范围的AFC系统.【期刊名称】《舰船电子对抗》【年(卷),期】2010(033)003【总页数】3页(P93-95)【关键词】雷达接收机;鉴相器;自动频率控制;频率合成器【作者】柴俊【作者单位】船舶重工集团公司723所,扬州225001【正文语种】中文【中图分类】TN957.570 引言自动频率控制(AFC)电路是使用磁控管发射机的雷达接收机的重要辅助电路,一般雷达接收采用超外差式,雷达高频回波信号经过与本振混频变为额定中频,然后在该中频上进行放大和匹配滤波。
现在的本振频率稳定度可以做到10-7 以上,但是由于磁控管发射机本身存在预热漂移、温度漂移、负载变化以及电源变化而引起的缓慢的频率漂移,从而使得混频后的中频信号不能位于固定中频滤波器的中心,这样在接收机中采用AFC 电路就显得非常必要。
由于频率漂移的变化量随着发射机磁控管的工作频率升高而增大,当工作频率位于X 频段时,这种变化量可以高达十多兆到二十几兆赫兹。
另外由于发射机磁控管有一定的寿命,需要定期更换磁控管,而磁控管振荡频率为离散性,同一型号磁控管的振荡频率也会不同。
这就要求系统具有很宽的跟踪带宽,然而跟踪范围与跟踪精度是矛盾的,为了克服这个矛盾,保证跟踪精度而又使跟踪范围尽可能大。
本文提出使用移相网络和鉴相器实现中频鉴频器的鉴频特性,同时使用频率合成技术。
1 系统组成及工作原理雷达接收机的AFC 系统一般采用在中频实现的方案,接收机采用一次混频,在中频上实现AFC的系统如图1 所示。
图1 AFC 工作原理方框图磁控管振荡器产生的高频脉冲经过耦合器耦合很小一部分射频信号与频率合成器产生的本振信号混频产生中频信号,中频信号输入到AFC 系统,经过AFC 系统产生控制频率合成器的控制信号,使得频率合成器输出的本振信号与磁控管振荡器产生的高频脉冲的频率相差一个中频信号的频率。
自动频率控制
对于调频接收系统来说,都要用 调频解调器。由于噪声的存在,任何普通的调频解调器都有一个解调的门 限值。当调频解调器的输入信噪比高于解调门限值时,调频波解调后的输出信噪比将有所提高,并且其值与输入 信噪比成线形关系。
谢谢观看
1.自动频率微调电路
自动频率控制电路广泛用于接收机中作自动频率微调电路。图2是一个具有自动频率微调电路的调幅接收机 框图。与普通的接收机不同的是本级振荡器改为能进行调整频率的压控振荡器,同时增加了限幅鉴频器、中频放 大器和低通滤波器,与混频器和中频放大器组成一个自动频率控制电路。
图2调幅接收机ቤተ መጻሕፍቲ ባይዱAFC方框图
术语简介
术语简介
工作原理
实现自动频率控制功能的电路简称AFC环。AFC环主要由鉴频器和受控本地振荡器等部件构成。后者大多采 用压控振荡器,它能使中频在输入信号频率和本地受控震荡频率发生变化时尽量保持稳定。鉴频器的作用是检测 中频的频偏,并输出误差电压。闭环时,输出误差电压使受控震荡器的震荡频率偏离减小,从而把中频拉向额定 值。这种频率负反馈作用经过AFC环反复循环调节,最后达到平衡状态,从而使系统的工作频率保持稳定且偏差 较小。
应用举例
应用举例
早期的AFC环用于自动调谐接收机,以简化接收机的调谐手续,并使它在发射信号频率不稳定时也能进行稳 定接收。20世纪50年代初期,AFC环开始用于调频通信接收机,以提高抗干扰能力;用于雷达接收机以实现频率 微调;还用于调频发射机和其他电子设备,以提高主振频率的稳定度。下面以自动频率微调电路和调频负反馈解 调器为例简单说明。
自动频率控制
物理领域术语
目录
01 术语简介
02 应用举例
基本信息
自动频率控制(automatic frequency control),使输出信号频率与给定频率保持确定关系的自动控制方 法。实现这种功能的电路简称AFC环。AFC环主要由鉴频器和受控本地振荡器等部件构成。后者大多采用压控振荡 器,它能使中频fi在输入信号频率fc和本地受控振荡频率fi发生变化时尽量保持稳定。
雷达信号处理
雷达信号处理技术与系统设计第一章绪论1.1 论文的背景及其意义近年来,随着电子器件技术与计算机技术的迅速发展,各种雷达信号处理技术的理论与应用研究成为一大热门领域。
雷达信号的动目标检测(MAD)是利用动目标、地杂波、箔条和气象干扰在频谱上的差别,抑制来自建筑物、山、树、海和雨之类的固定或低速杂波信号。
区分运动目标和杂波的基础是它们在运动速度上的差别,运动速度不同会引起回波信号频率产生的多普勒频移不相等,这就可以从频率上区分不同速度目标的回波。
固定杂波的中心频率位于零频,很容易设计滤波器将其消除。
但对于运动杂波,由于其多普勒频移未知,不能像消除固定杂波那样很容易地设计滤波器,其抑制就变得困难了从本质上来讲,雷达信号的检测问题就是对某一坐标位置上目标信号“有”或“无”的判断问题。
最初,这一任务由雷达操作员根据雷达屏幕上的目标回波信号进行人工判断来完成。
后来,出现了自动检测技术,一开始为固定或半固定门限检测,这种体制下当干扰和杂波功率水平增加几分贝,虚警概率将急剧增加,以至于显示器画面饱和或数据处理过载,这时即使信噪比很大,也不能作出正确的判断。
为克服这些问题进而发展了自适应恒虚警(Constant FalseAlarm Rate,CFAR)检测。
CFAR 检测使得雷达在多变的背景信号中能够维持虚警概率的相对稳定,这种虚警概率的稳定性对于大多数的雷达,如搜索警戒雷达、跟踪雷达、火控雷达等。
第二章 雷达信号数字脉冲压缩技术2.1 引言雷达脉冲压缩器的设计实际上就是匹配滤波器的设计。
根据脉冲压缩系统实 现时的器件不同,通常脉冲压缩的实现方法分为两类,一类是用模拟器件实现的 模拟方式,另一类是数字方式实现的,主要采用数字器件实现。
脉冲压缩处理时必须解决降低距离旁瓣的问题,否则强信号脉冲压缩的旁瓣 会掩盖或干扰附近的弱信号的反射回波。
这种情况在实际工作中是不允许的。
采 用加权的方法可以降低旁瓣,理论设计旁瓣可以达到小于-40dB 的量级。
题目雷达天线伺服控制系统设计与校正_实用模板
课程设计说明书
课程设计说明书
2.4.2 在前向通道中接入饱和非线性环节的Simulink模型及仿真分析
课程设计说明书
由图11与图13对比可得在校正后系统的前向通道中接入饱和非线性环节后超调量轻微减小
2.4.3在前向通道中接入回环非线性环节的Simulink模型及仿真分析 由图11与图15对比可得在接入回环非线性环节后超调量增大,调整时间变大
sys=tf(num,den) nyquist(sys) 由图3分析可知Nyquist轨迹包围点(-1,j0),故校正前 闭环系统不稳定 2.1.5未校正系统的根轨迹分析 用MATLAB进行编程,程序如下
clear;clc num=[2000 100000]
课程设计说明书
den=[1 35 350 1000 0] sys=tf(num,den) rlocus(sys) hold on grid hold on
20XX
题目:雷达天线伺服 控制系统设计与校正
汇报人:xxx
-
目录
课程设计说明书
题目:雷达天线伺服控制系统设计与校正
1PART 1
课程设计说明 书
课程设计说明书
1.课程设计简介 1.1课程设计任务 1. 使学生初步掌握控制系统数字仿真的基本方法 2. 学会利用利用MATLAB语言进行控制系统仿真和辅助设计的基本技能 1.2 课程设计内容 已知某雷达天线伺服反馈控制系统的开环传递函数为:。要求设计系统的校正装置,使系 统达到下列指标:(1)在单位斜坡信号作用下,系统的稳态误差ess≤1%(系统的速度误差 系数 Kv=100s-1;);(2)超调量 Mp<30%,调节时间 Ts<2秒;(3)相角稳定裕度在 Pm >45°,幅值定裕度Gm>20 1.3 课程设计任务要求 1. 画出未校正系统的根轨迹图,分析系统是否稳定
相控阵雷达波控系统的设计
本 功能 : 位控制 、 相 同步 控 制 、 据 传 输 、 自 数 对 检 信 号 的 检 测 和处 理 , 此 之 外 , 除 如果 条 件 允 许 还 应 有 其 它 一些 辅 助 功 能 , 随 机 馈 相 、 如 天
馈 线 相 位 误 差 的 补 偿 、 率 捷 变 后 天 线 波 束 频 的 指 向修 正 、 移 相 器 工 作 相 位 的 监 测 、 束 对 波 形 状 的变 化 、 场 测 试 等 。 近
级 的低 功 率数 字 移 相 器 实 现 发 射 波 束 的 形 成
1 引 言
相 控 阵 雷 达 天线 波 束 的 扫 描 由计 算 机 控
制 , 有 很 大 的 灵 活 性 , 束 在 空 间 的 扫 描 几 具 波
和 扫 描 , 此 , 天 线 波 束 定 位 是 波 控 系 统 的 因 对 基 本 任 务 , 时 根 据 不 同 的 波 束 指 向 计 算 并 同
De i n o a e rng Sys e s g f Be m St e i t m ofPha e r a da s d A r y Ra r
陈 之 涛
( 东 电子 工程研 究 所 , 肥 20 3 ) 华 合 30 1“
【 要 】 讨 论 了 相 控 阵 雷 达 波 控 系统 的 设 计 。 应 用 查 表 法 完 成 波 束 控 制 . 过 模 块 化 设 计 摘 通
维普资讯
2 0 第 7 2期 0 2年 第 ( 总 §期 )
现
代 电 子
M o e n Elc r n c d r eto is
No 2 2 .2 00 ( e i s No 7 ) S re . 9
相 控 阵 雷 达 波 控 系 统 的 设 计
(完整word版)相控阵雷达系统的设计与分析
第一章相控阵雷达系发射信号的设计与分析1.1 雷达工作原理雷达是Radar(RAdio Detection And Ranging)的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
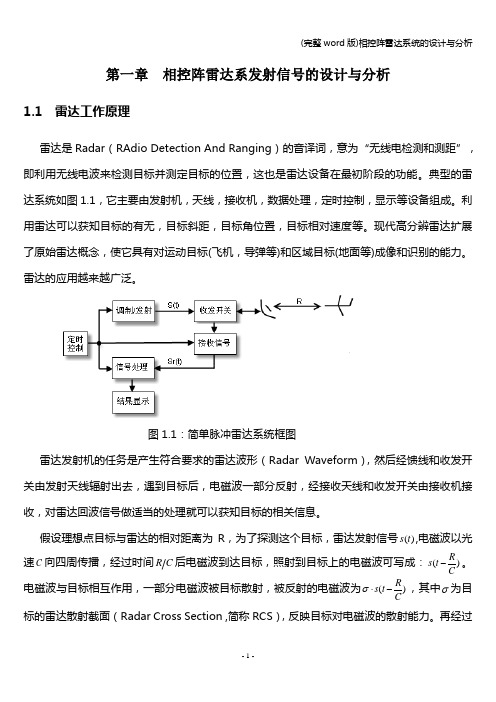
典型的雷达系统如图1.1,它主要由发射机,天线,接收机,数据处理,定时控制,显示等设备组成。
利用雷达可以获知目标的有无,目标斜距,目标角位置,目标相对速度等。
现代高分辨雷达扩展了原始雷达概念,使它具有对运动目标(飞机,导弹等)和区域目标(地面等)成像和识别的能力。
雷达的应用越来越广泛。
图1.1:简单脉冲雷达系统框图雷达发射机的任务是产生符合要求的雷达波形(Radar Waveform),然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由接收机接收,对雷达回波信号做适当的处理就可以获知目标的相关信息。
假设理想点目标与雷达的相对距离为R,为了探测这个目标,雷达发射信号()s t,电磁波以光速C向四周传播,经过时间R后电磁波到达目标,照射到目标上的电磁波可写成:()R-。
s tC电磁波与目标相互作用,一部分电磁波被目标散射,被反射的电磁波为()Rσ⋅-,其中σ为目s tC标的雷达散射截面(Radar Cross Section ,简称RCS),反映目标对电磁波的散射能力。
再经过时间R C 后,被雷达接收天线接收的信号为(2)R s t Cσ⋅-。
如果将雷达天线和目标看作一个系统,便得到如图1.2的等效,而且这是一个LTI (线性时不变)系统。
图1.2:雷达等效于LTI 系统等效LTI 系统的冲击响应可写成:1()()Mi i i h t t σδτ==-∑ (1.1)M 表示目标的个数,i σ是目标散射特性,i τ是光速在雷达与目标之间往返一次的时间,2ii R cτ=(1.2) 式中,i R 为第i 个目标与雷达的相对距离。
气象雷达自调节本振模块

气象雷达自调节本振模块
自调节本振模块通常包括以下几个方面的功能和特点:
1. 频率自校准,自调节本振模块能够通过内部的反馈机制对本振的频率进行自动校准,以确保其频率稳定性和准确性。
2. 环境适应,模块能够根据外部环境的温度、湿度等因素对本振进行动态调节,以适应不同的气象观测环境。
3. 故障诊断,自调节本振模块通常还具备故障诊断功能,能够监测本振工作状态,并在出现故障时进行自动切换或报警,以确保雷达系统的稳定运行。
4. 远程控制,部分自调节本振模块还支持远程控制和监测,可以通过网络实现对本振的远程调节和管理。
总的来说,气象雷达自调节本振模块是一种关键的技术装备,能够提高气象雷达系统的稳定性、准确性和可靠性,从而更好地为气象观测和预报提供支持。
该模块的研发和应用对于提升气象雷达技术水平具有重要意义。
一种基于FPGA的雷达波束控制系统设计
一种基于FPGA的雷达波束控制系统设计常慧玲;马莉;张健【摘要】为了达到波束控制高效、低成本和小型化的目标.在此介绍一种基于FPGA的相控阵雷达波束控制系统硬件平台及其软件设计.系统采用FPGA作为波束控制算法实现的核心,选用单片机实现阵面组件驱动部分的控制调试,在此硬件平台上,开发一种用硬件描述语言和单片机汇编语言与VB语言设计相结合实现的波束控制系统.设计的系统设备量少,控制和调试功能完善,适宜于推广到集中式运算、分布式驱动的波束控制体系.【期刊名称】《现代电子技术》【年(卷),期】2010(033)008【总页数】4页(P186-188,193)【关键词】雷达波束控制;FPGA;单片机;阵面阻件驱动【作者】常慧玲;马莉;张健【作者单位】南京电子技术研究所,江苏,南京,210013;南京电子技术研究所,江苏,南京,210013;南京电子技术研究所,江苏,南京,210013【正文语种】中文【中图分类】TP368.10 引言波束控制系统的基本功能是给天线阵列中各个移相器提供所需要的控制信号。
除此基本功能外,现代雷达还要求波束控制系统高速高效、低成本、小型化,并具有波束控制分系统的自检;根据工作频率,进行初相位在线补偿;天线相位码随机馈相等功能。
同时,在设计生产过程中,为了配合其他系统的检测,还需要在雷达的不同工作模式下完善调试功能。
另外,在雷达的长期使用过程中,要求单个组件维修时,波束控制组件驱动板能在脱机状态下正常工作[1-3]。
这里展开介绍一种有源相控阵雷达波束控制系统的硬件平台及软件设计。
1 系统原理为降低电路成本和增加系统可靠性,该系统采用设备量少、维修方便、可靠性高的集中式运算、分布式驱动体系。
也就是,波束控制算法用一块电路板(称之为运算板)实现。
对工作方式,运算板接收来自雷达控制台的控制指令(包括主天线的方位和俯仰增量代码、工作频率、工作模式代码等),进行波束控相位码的计算、传输、分配与格式重排。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达自动频率控制系统的设计汪叶拾摘要:论述了毫米波雷达自动频率微调系统设计的方法,及如何保证自动频率控制系统达到设计要求,着重讨论了自动频率微调系统的控制电路、振荡器(VCO)等设计的特点.关键词:自动频率微调(AFC);压控振荡器(VCO);鉴频器分类号:TN957.5文献标识码:A文章编号:1000-5889(2000)01-0086-04Design procedure of automatic frequency control system ofradarWANG Ye-shi(Changfeng Machine Factory, Lanzhou730070, China) Abstract:The design procedure of automatic frequency control (AFC) system of millimeter-wave radar and how to guarantee as design specifications are discussed. The design features of control circuit and volume control oscillator (VCO) of AFC system are taken as the discussion emphasis. The result shows that, by using searching-tracing AFC system, the frequency sieze region can be expanded and the frequency tracing accuracy improved.Key words:automatic frequency control; volume control oscillator; frequency detector▲雷达的发射机磁控管及本振频率稳定性不高,随着外界条件的变化而变化,因而经过混频后的中频信号的频率也随着变化.由于雷达接收机的频率带宽有限,这样就会导致中频落在系统的中频放大器最佳通频带之外,使中频增益下降,接收机灵敏度降低.为了保证混频后的中频不变,必须采用自动频率微调系统来保证接收机正常工作.对于毫米波雷达其工作频率很高,频率变化的数值更大,对AFC系统要求频率控制范围大,跟踪精度高,因而系统的设计有很大的难度.本AFC系统采用先进的搜索跟踪式系统,克服了跟踪式AFC系统的跟踪速度慢,跟踪范围窄的缺点.同时采用的压控振荡器(VCO)为注锁放大式(一级VCO与一级注锁放大器级联),具有体积小,输出功率大且平稳,温度稳定性好的特点,这些特点使AFC控制电路比较好实现.1 AFC系统的设计要求1) 频率跟踪精度高,即剩余失谐fε小.和本2)频率跟踪范围要大,跟踪速度要快,即在发射信号频率fs振频率ft 的可能变化范围(Δfs+Δft)内,应该能够跟踪得上其频率变化的速度,以保证正确的频率跟踪.3)频率搜索范围要大,搜索速度要快.即频率搜索范围应大于发射信号频率和本振的可能变化范围(Δfs +Δft),而且搜索时间应该小于允许的最大搜索时间.2 AFC系统的设计2.1 AFC系统的原理为了满足AFC系统的要求,采用的差频搜索式AFC系统,通过调整VCO的频率,来保证中频频率稳定.本系统采用低差式混频,即发射信号的频率大于本振频率一个中频.当无发射信号fs 或者中频fs-ft=fi大于鉴频器通频带与额定中频之和时,电路处于搜索状态,输出的锯齿波加到VCO上,使VCO频率进行搜索.当VCO由低向高搜索,而中频由高向低变化,在大于额定中频fi0时(见图1 A点),鉴频器输出正电压通过视放倒相,产生一个负脉冲,由于不能使峰值检波器工作,搜索振荡继续进行.当VCO频率与信号频率之间的差频小于额定中频fi0时(见图1 B点),鉴频器输出负脉冲经视放倒相,使峰值检波器导通,该电压使锯齿波振荡器停振并保持其电位,也使VCO保持此电位,AFC进入跟踪状态.在跟踪状态,当本振或发射机的频率变化时,鉴频器输出幅度变化,通过峰值检波器反映到搜索振荡器的电位随之变化,反馈到VCO,使VCO的振荡频率进行调整,保证中频频率不变,此时系统处于跟踪状态.当fs 与ft的差值超出了鉴频器通频带时,峰值检波器无输出,进入搜索状态.图1 鉴频曲线及控制曲线2.2 AFC系统的结构图2为AFC系统的原理方框图,AFC系统由高频部分和控制部分组成,高频部分包括混频器、VCO,控制部分由中放、鉴频器、视放、锯齿波振荡器组成,它是一个闭环系统.本振信号与发射机信号通过混频器产生中频,产生的中频通过控制部分,根据差频fi 偏离额定中频fi0的大小与方向,产生出相应的控制电压,加入到VCO,调整VCO的频率,使中频接近额定中频.]图2 AFC系统方框图2.3 AFC控制电路的设计AFC控制电路由中放、鉴频器、视放及频率搜索电路组成.1)中放电路和AGC控制电路:由于混频器的输出功率比较小,而使鉴频器正常工作的输入信号应大于2 V,因此必须将中频信号进行放大,一般输入信号在200 mV左右,加上1~2倍增益余量,因而中频增益为40 dB.中放的带宽取决于信号的脉冲宽度,设脉冲宽度为τ,则中放的带宽为B=1.5/τ[1].用两级谐振放大器即可满足条件.为了保证鉴频器输入信号不因中频信号的幅度变化而变化,放大管工作在饱和状态,使鉴频器输出的误差信号电压只与中频频率的变化有关.但信号过大,中频放大器会发生饱和限幅,而产生谐波的错误控制,所以增加了自动增益控制电路(AGC电路).通过交流旁路控制输入信号的幅度.2) 鉴频器:鉴频器作为整个系统的核心,系统的跟踪精度及跟踪范围都取决于鉴频器的设计.为了提高鉴频器的效率并满足参数要求,本鉴频器采用了参差调谐式以适应工作频率高、鉴频器带宽较宽的要求.同时又能得到较大的鉴频系数,使系统的跟踪精度满足要求.3) 视放:视放的增益影响到系统的跟踪精度,为了保证跟踪精度,视放的增益应尽量大,但增益太大,系统的稳定性变差.适当的选择参数设计出一宽带放大器,一般取一级放大即可.4)搜索电压产生器及停振器:搜索电压产生器是由一双基极二级管产生,利用其负阻特性来产生锯齿波电压,并加到VCO上进行频率搜索.如图3所示.图3 搜索电压产生器及停振器二级管VD1、电容C1和晶体管T1组成峰值鉴波器,同时T1还作为停振器及直流放大器.T2,Rt和Ct组成锯齿波产生器,为了使频率跟踪精度高,要求锯齿波线性好,采用恒流源对电容充电,恒流源由T3,VD1和Rt组成(见图3).确定锯齿波电压的周期和幅度:为了使AFC系统能由频率搜索状态转为频率跟踪状态,在鉴频器通频带B之内至少应能搜索到n0个脉冲(一般n=6~15),否则由于峰值检波器的惰性,检波电压将很小.已知发射信号的重复频率为1/T,而锯齿波电压的扫掠时间ts <T,确定的频率搜索范围为fm,则锯齿电压的扫掠时间ts加上锯齿电压的回程时间(一般小于0.1ts),这就是锯齿波的重复周期.搜索电压的幅度(即范围)不能同时包含本振的镜像.已知VCO的斜率,就能计算出锯齿波的幅度.2.4 VCO及混频器VCO的初始温漂、温漂,及在机械调谐范围内功率的平坦度在系统中要求比较高.首先要求VCO的初始温漂、温漂之和不大于VCO的电调带宽,以保证AFC搜索时能捕捉到本振频率.考虑到发射机磁控管开机频漂及温度漂移,要求VCO的初始漂移及温度漂移与发射机同方向,大小尽可能接近.同时采用PTC材料对本振进行加热,产生简单的恒温,使本振温漂减小.但这种方法无法改善初始温漂,考虑到VCO的耿氏管偏压变化时,将产生推频,利用这一特性,对耿氏管开机时的电压进行自动控制,使在开机时其电源电压值的变化产生的推频与初始温漂方向相反,从而使初漂得到改善.VCO用体效应管作为振荡器.为了提高输出功率和频率的稳定度,采用注锁放大级联的方案,若用大功率体效应管,则电流也大,其温度稳定性就差,初漂、温漂都大,且在要求的频率带宽内功率起伏比较大.如果采用注锁放大级联方式,就可用较小功率的耿氏管,使VCO的初漂和温漂性能有所改善.同时增加校正网络,改善输出信号的频率线性.注锁放大器的原理(见图4)为:振荡器1是一个稳定性较高的小功率耿式管振荡器,其频率为f1;振荡器2是一个功率较大的振荡器,其频率为f2.振荡器1通过环行器把少量的功率注入振荡器2,只要f1和f2之差小于一定数值,则振荡器2接收到的振荡器1的频率牵引在f1上,并具有振荡器1的稳定度.图4 VCO的原理由于AFC系统的混频器可以不考虑本振噪声的影响,主要考虑混频器不过载与减小谐波混频成分.为了减小谐波混频成分,要正确选择本振功率及信号功率,加到混频器的信号功率Ps 和本振功率Pt相差大一些,则在较弱的那个信号的变化范围内变频互导可以看成是一个常数,因而由混频器产生的谐波成分就小[1].以上对整个AFC系统作了分析,随着元器件的高度集成化,AFC的控制电路会更简单,体积更小,跟踪精度更高.3 结论1) 采用搜索跟踪式AFC系统,可以增加频率捕捉范围,提高频率跟踪精度.2)对VCO的设计,使本振频率的稳定性更高,整个系统的温度稳定性也得到改善.3)以上AFC系统用在雷达上,其性能、温度稳定性、频率跟踪带宽很好地满足了雷达整机的要求.■作者简介:汪叶拾(1963-),女,安徽歙县人,兰州长风机械厂工程师.作者单位:汪叶拾(兰州长风机器厂,甘肃兰州730070)参考文献:[1]西北电讯工程学院编写组.雷达接收设备:下册.西安:西安西北电讯工程学院出版社,1974.124-231.收稿日期:1999-06-08。