深度图像的二值化
MATLAB图像处理基础教程
MATLAB图像处理基础教程第一章:MATLAB图像处理简介MATLAB(Matrix Laboratory)是一种强大的数值计算和数据可视化软件,广泛应用于各个领域,包括图像处理。
图像处理是一门研究如何对数字图像进行分析、增强、重建和压缩的学科。
本教程将引导读者逐步了解MATLAB图像处理的基本概念和技术。
第二章:MATLAB图像的读取与显示在MATLAB中,可以使用imread函数读取不同格式的图像文件,并使用imshow函数显示图像。
此外,还可以使用imfinfo函数获取图像的详细信息,如分辨率、颜色空间和位深度等。
第三章:图像的灰度处理灰度处理是一种常见的图像预处理方法。
通过将彩色图像转换为灰度图像,可以减少图像的数据量,简化图像处理的复杂性。
在MATLAB中,可以使用rgb2gray函数将彩色图像转换为灰度图像,并使用imhist函数查看灰度图像的直方图。
第四章:图像的滤波处理滤波是一种常用的图像处理操作,用于对图像进行平滑、增强或去噪。
MATLAB提供了各种滤波函数,如均值滤波、中值滤波和高斯滤波等。
可以根据具体需求选择合适的滤波方法,并使用imfilter函数进行滤波处理。
第五章:图像的二值化处理图像的二值化是将图像转换为黑白两色的过程,常用于物体检测、识别和分割等应用。
在MATLAB中,可以使用im2bw函数将灰度图像转换为二值图像,并可以调整阈值来控制二值化的效果。
第六章:图像的几何变换几何变换是一种常见的图像处理操作,用于对图像进行旋转、缩放、平移和翻转等操作。
MATLAB提供了imrotate、imresize、imtranslate和flip函数等实现各种几何变换。
通过组合这些函数,可以实现复杂的图像变换。
第七章:图像的特征提取图像的特征提取是图像处理中的重要步骤,用于从图像中提取出具有代表性的信息。
在MATLAB中,可以使用各种特征提取函数,如imgradient、imhistogram和imcontour等。
图像位深度的名词解释

图像位深度的名词解释图像是我们生活中常见的一种表现形式,它可以帮助我们记录和回顾美好的记忆,同时也成为许多专业领域中不可或缺的工具。
在数字图像处理中,图像位深度是一个重要的概念。
本文将对图像位深度进行详细解释,并探讨其在图像处理中的应用。
一、图像位深度的定义图像位深度,又称色彩深度或像素深度,用于描述一幅数字图像中每个像素所占的位数。
它反映了图像在色彩或灰度方面的表现能力。
通常用n位来表示一个像素的深度,其中n代表每个像素可以存储的不同值的数量。
位深度越高,图像能够表示的色彩或灰度级别也越多,图像的细节和质量就越高。
二、位深度的影响因素1. 像素色彩空间位深度的不同取决于像素颜色空间的选择。
在RGB色彩模式下,图像的每个像素可以由红、绿、蓝三原色组合而成,因此对于RGB图像,每个像素的位深度可以分别设定。
而在灰度图像中,像素只有一个通道,其位深度则是统一设定的。
2. 存储方式位深度还受到存储方式的限制。
在计算机中,图像可以以不同的格式进行存储,如位图、矢量图等。
每种存储方式都有其特定的表示规则和位深度设定。
三、常见的位深度常见的图像位深度有1位、8位、16位和32位等。
每种位深度都有其特定的应用领域和优劣势。
1. 1位位深度1位深度的图像仅能表达二值信息,即黑与白两种颜色。
由于其色彩表现能力极低,1位深度图像一般用于特定的领域,如二值化图像处理、印刷行业的制版等。
2. 8位位深度8位深度的图像可以表达256种不同的颜色或灰度级别。
这种位深度常用于网页图片、电子文档中的图片、个人摄影作品等。
由于其储存空间相对较小,8位图像在传输和保存时更为便捷。
3. 16位位深度16位深度的图像能够表现更多的细节和色彩层次,其色彩过渡更加平滑自然。
这使得16位图像在专业摄影、医学图像处理、计算机图形学等领域得到广泛应用。
4. 32位位深度32位深度的图像可以表达更多的色彩和图像信息,包括透明度、颜色饱和度等。
这种位深度常用于计算机生成图像、动画制作、特效合成等专业领域。
改进二值化算法在QR码识别中的应用

改进二值化算法在QR码识别中的应用随着移动支付和智能扫码的普及,二维码技术成为了现代社会中不可或缺的一部分。
QR码是一种常见的二维码,它可以存储大量信息,并且具有快速识别的特点。
然而在实际应用中,由于光照条件、摄像头质量等因素的影响,QR码识别的准确性和速度仍然存在一些问题。
如何改进二值化算法在QR码识别中的应用成为了研究的焦点之一。
1. 二值化算法的基本原理二值化是一种常见的图像处理方法,它将彩色图像转换为黑白图像,即将图像中的每个像素点的灰度值设定为黑色或白色。
其基本原理是通过设定一个阈值,将灰度值小于阈值的像素点设定为黑色,大于阈值的像素点设定为白色。
常用的二值化算法有全局阈值法、局部阈值法、自适应阈值法等。
2. 二值化算法在QR码识别中的应用在QR码识别过程中,首先需要对图像进行预处理,将彩色图像转换为黑白图像,然后再进行识别和解码。
而二值化算法在这一过程中起到了至关重要的作用。
通过合适的二值化算法,可以提高图像的质量,减少噪声干扰,从而提高QR码的识别准确性和速度。
3. 改进二值化算法在QR码识别中的意义传统的二值化算法往往是基于图像的全局信息进行处理的,当图像受到光照不均、噪声干扰等因素影响时,会导致二值化后的图像质量下降,从而影响QR码的识别效果。
如何改进二值化算法,使其能够更好地适应不同的光照条件和噪声干扰,成为了当前研究的主要方向之一。
4. 改进二值化算法的方法针对传统二值化算法存在的问题,研究者们提出了许多改进的方法,主要包括以下几种:(1)局部自适应阈值法局部自适应阈值法是一种基于图像局部信息进行二值化的方法,它可以根据不同区域的灰度值分布情况来调整阈值,从而提高图像质量。
这种方法能够有效地处理光照不均、噪声干扰等问题,对于QR码的识别具有较好的效果。
(2)多阈值法多阈值法是在传统二值化算法的基础上引入多个阈值,根据不同区域的灰度值来确定二值化的结果。
通过合理选择阈值,可以更好地适应光照变化和噪声干扰,提高图像质量。
改进二值化算法在QR码识别中的应用

改进二值化算法在QR码识别中的应用随着二维码技术的日益普及,人们对于二维码的识别和应用要求也越来越高。
而在二维码识别过程中,二值化算法起着至关重要的作用。
而如何改进二值化算法以提高在QR码识别中的应用效果,是目前亟需解决的问题之一。
二值化算法是将图像处理成二值图像的一种算法。
在QR码识别中,二值化算法可以将彩色图像转换成黑白图像,减少了数据量,提高了识别效率。
通过二值化算法,可以将图像中的目标轮廓、信息提取出来,使得二维码的信息得以提取和识别。
改进二值化算法对于提高QR码识别的准确性和效率至关重要。
二、当前二值化算法的不足之处目前存在的二值化算法在应用于QR码识别中仍然存在一些问题。
主要表现在以下几个方面:1. 灰度图片二值化后的效果不佳。
在QR码识别中,由于拍摄环境和设备的不同,图像的光照、对比度、色彩等方面会有很大的差异,导致传统的二值化算法无法完全适应不同环境下的灰度图片。
2. 二值化结果过于依赖图像的对比度。
当前的二值化算法往往过于依赖图像的对比度,当图像的对比度较低时,二值化算法的效果会大打折扣,导致QR码的识别困难。
3. 对噪声和干扰不敏感。
在实际应用中,图像往往伴随着各种噪声和干扰,而当前的二值化算法对于这些噪声和干扰的处理能力较弱,识别效果不尽人意。
三、改进二值化算法的应用为了解决当前二值化算法存在的不足之处,提高在QR码识别中的应用效果,可以从以下几个方面进行改进:1. 基于深度学习的二值化算法。
深度学习在图像处理领域有着广泛的应用,通过训练神经网络,可以实现对图像的自适应二值化处理,更好地适应不同环境下的灰度图片,提高识别的准确性和稳定性。
2. 考虑图像的对比度不足的情况。
可以针对图像对比度不足的情况,改进二值化算法的算法流程,引入对比度的自适应调整,使得在不同对比度下都能获得良好的二值化效果。
3. 强化对噪声和干扰的处理能力。
可以通过引入图像处理技术,如滤波、降噪等手段,对图像进行预处理,去除噪声和干扰,提高二值化算法对于噪声和干扰的处理能力,从而提高QR码的识别效果。
可微分二值化
可微分二值化可微分二值化在很多计算机视觉领域的应用中,图像的二值化处理是一个至关重要的步骤。
而在深度学习的图像处理任务中,常常需要对真实图片进行二值化处理,以便更好地进行区分和分析。
可微分二值化是一种新的方法,用于将图像转换为黑白像素值为0和1,同时保留更多的信息,有助于提高图像处理的效率和准确性。
可微分二值化通过使用可微分的激活函数,将图像的灰度数据转换为二值化的数据形式。
与传统的阈值法相比,可微分二值化具有更好的可控性和鲁棒性。
它不仅可以通过调整阈值来灵活地控制图像的二值化效果,更可以根据实际任务需要,选择不同的激活函数来实现更好的结果。
可微分二值化的其中一个重要优势是,它能够在训练过程中自适应地学习最佳的阈值,并进行高效的优化。
传统的阈值法通常需要手动设置阈值,若选择的阈值有误,会直接导致图像处理结果的失真。
而可微分二值化通过计算出最小化训练误差的阈值,可以更加准确地进行二值化处理,大大降低了处理结果的误差和失真。
除了适用于普通的二值化任务之外,可微分二值化还可以广泛应用于其他图像处理及计算机视觉领域,例如文本检测、物体检测以及人脸识别等。
在文本检测任务中,将文本区域从背景区域中准确地分离出来是一个很困难的任务。
可微分二值化通过对文本图像的二值化处理,提取出文本的轮廓信息,有助于后期的文本检测及识别。
在物体检测任务中,通过将图像二值化来获取目标的轮廓信息,并进行特征提取和分类,能够实现高效的物体检测。
在实际应用中,可微分二值化可以解决传统方法中出现的过拟合和欠拟合等问题,具有更好的泛化能力和鲁棒性。
总的来说,可微分二值化是一种非常有用的图像处理方法,可以在不失精度的情况下,提高图像处理的效率和准确性。
它在许多计算机视觉领域中有着广泛的应用前景,未来将会有更多的研究和应用将其发展壮大。
opencv自适应二值化原理

opencv自适应二值化原理自适应二值化是指可以动态调整阈值的二值化方法。
与传统的全局固定阈值二值化方法不同,自适应二值化方法可以更好地处理图像中不同区域灰度值变化不同的情况。
在实际应用中,自适应二值化方法被广泛应用于数字图像处理、计算机视觉和机器学习等领域。
OpenCV是一个流行的计算机视觉库,其提供了自适应二值化的实现。
下面将介绍OpenCV自适应二值化的原理和使用方法。
1. 原理自适应二值化的原理就是在图像中划分若干个局部区域,对每个局部区域内像素灰度进行统计和分析,利用局部区域内像素灰度的均值或者中值来作为此区域的阈值进行二值化。
即对于同一幅图像的不同区域可以采用不同的二值化阈值。
自适应二值化的具体实现方法有两种:基于均值的方法和基于中值的方法。
两种方法都需要指定一个邻域大小,该大小通常为奇数,表示局部区域的大小。
2. OpenCV实现在OpenCV中,它提供了cv::adaptiveThreshold函数来实现自适应阈值二值化。
其函数原型如下:cv::adaptiveThreshold(InputArray src, OutputArray dst, double maxValue, int adaptiveMethod, int thresholdType, int blockSize, double C);函数说明:src: 输入图像,必须是单通道8位或32位浮点数。
dst: 输出图像,与源图像具有相同的大小和深度。
maxValue: 阈值的最大值,通常为255。
adaptiveMethod: 使用的自适应方法。
取值为:cv::ADAPTIVE_THRESH_MEAN_C:基于均值的方法。
cv::ADAPTIVE_THRESH_GAUSSIAN_C:基于高斯加权平均的方法。
thresholdType: 阈值的类型。
取值为:cv::THRESH_BINARY:二值化。
cv::THRESH_BINARY_INV:反二值化。
cv2.threshold 用法

文章标题:深度解析cv2.threshold的用法在图像处理和计算机视觉的领域中,cv2.threshold是一个非常重要的函数,它经常被用来进行图像的二值化处理。
在本文中,我们将从简单的用法开始,逐步探讨cv2.threshold在图像处理中的广泛应用和深层次的原理。
1. cv2.threshold的基本用法在图像处理中,我们经常需要将一幅灰度图像转换为二值图像,以便于后续处理和分析。
cv2.threshold函数能够帮助我们实现这一目的。
它的基本用法非常简单:```pythonret, binary_image = cv2.threshold(gray_image, threshold_value, max_value, threshold_type)```其中,gray_image是输入的灰度图像,threshold_value是设定的阈值,max_value是输出的最大值,threshold_type是阈值化的类型。
2. cv2.threshold的参数解释和实际应用接下来,我们将深入解释每个参数的含义和实际应用场景。
首先是threshold_value,它代表了设定的阈值。
这个阈值的选择对于图像的二值化效果至关重要。
如果选择的阈值过高或过低,可能会导致图像细节丢失或噪声过多。
在实际应用中,我们通常需要根据图像的特点和需求来选择合适的阈值。
3. cv2.threshold的应用举例以下是一个实际的应用举例:假设我们需要对一张印刷体的黑白照片进行二值化处理,以便于后续文字识别。
我们可以使用cv2.threshold 函数,根据图像的灰度分布特点,选择合适的阈值进行二值化处理。
4. cv2.threshold的深层次原理除了基本的二值化处理外,cv2.threshold还可以根据不同的threshold_type参数实现各种不同的阈值化效果,比如大津法、自适应阈值等。
这些深层次的原理需要我们深入理解图像处理和统计学知识,以便在实际应用中选择合适的阈值类型。
基于深度学习的图像边缘检测算法优化

基于深度学习的图像边缘检测算法优化深度学习是一种在计算机视觉领域中广泛应用的人工智能技术。
它通过建立复杂的神经网络模型,以从大量数据中学习,并在图像分类、目标检测和语义分割等任务中取得了显著的成果。
其中,图像边缘检测是计算机视觉领域中一个重要且有挑战性的任务。
在这篇文章中,我们将讨论基于深度学习的图像边缘检测算法优化的方法和技术。
在传统的图像边缘检测方法中,常用的算子包括Sobel、Canny和Laplacian等。
然而,这些传统方法往往对于复杂背景和噪声干扰较大的图像效果不佳。
而基于深度学习的边缘检测算法能够通过训练大规模数据集,自动学习图像中的特征,进而在各种复杂场景下进行更准确的边缘检测。
现如今,基于深度学习的图像边缘检测算法已经在一些任务中取得了令人瞩目的结果。
为了进一步改进这些算法的性能,研究者提出了许多优化方法。
以下是其中几种值得关注的方法:首先,网络结构的设计对算法性能有着重要的影响。
最初的深度学习边缘检测算法使用的是卷积神经网络(CNN)。
然而,由于CNN在处理前后景对比不明显的图像时效果较差,研究者们开始尝试使用全卷积神经网络(FCN)。
FCN能够在一次前向传播中输出整个图像的边缘信息,从而提高了边缘检测的准确性。
其次,数据集的选择和预处理对算法的性能至关重要。
一个好的数据集能够提供充足的训练样本,使得模型能够更好地学习到图像中的边缘信息。
同时,预处理技术如数据增强和图像归一化等也能够很大程度上改善算法的性能。
数据增强技术包括平移、旋转、缩放和翻转等操作,能够增加训练数据的多样性,提高模型的鲁棒性。
此外,损失函数的设计也是优化算法性能的关键。
传统的边缘检测算法通常使用二值化的交叉熵损失函数。
然而,这种损失函数在边缘像素数量较少的情况下容易产生类别不平衡问题。
为了解决这个问题,研究者们提出了基于Focal Loss和Dice Loss的损失函数。
这些损失函数能够有效平衡正负样本之间的数量差异,提高边缘检测的性能。
阈值抖动算法

阈值抖动算法阈值抖动算法是一种常用的图像处理算法,用于将一个较高的色彩深度图像转换为较低的色彩深度图像。
其原理是通过比较每一个像素的灰度值与一个预先设定的阈值,并根据比较结果将像素值转换为黑色或白色,从而实现图像的二值化。
阈值抖动算法的主要目的是在保留图像主要特征的同时,通过将灰度值分布范围较广的像素进行抖动处理,来近似表示较高色彩深度图像。
该算法常用于黑白打印或传真等情况下,可以有效减少颜色信息量,从而节省传输和存储空间。
阈值抖动算法的核心思想是将像素值与阈值进行比较,并根据比较结果决定像素值的最终结果。
具体操作步骤如下:1.像素灰度值获取:对于一个输入图像的每个像素,计算其灰度值。
灰度值的计算方式可以是简单的求和计算,也可以使用更复杂的颜色通道加权平均等方式。
2.阈值设定:设定一个阈值,该值可以是固定的常数,也可以是根据输入图像的特点进行动态调整。
阈值的设定直接影响到最终二值化图像的质量。
3.像素值比较:将每个像素的灰度值与阈值进行比较。
若灰度值大于等于阈值,则将像素值设为白色,否则设为黑色。
这一步实际上是将图像的连续灰度值映射为只有两种离散颜色,即黑色和白色。
4.误差传播:在将像素值设定为黑色或白色后,可以根据当前像素值与理论值之间的差异,将误差传播到周围的像素。
该过程有助于更好地保留原始图像的细节并减小抖动引起的伪影。
5.输出结果:将经过阈值比较和误差传播处理后的像素值输出为最终的二值化图像。
该图像只包含黑色和白色两种像素值,可用于后续处理或展示。
需要注意的是,阈值抖动算法的效果取决于阈值的选取以及误差传播的方式。
不同的阈值和传播方式会导致不同的图像质量和细节保留程度。
因此,在实际应用中,需要通过试验和评估来选择最适合的参数组合。
总结起来,阈值抖动算法是一种将高色彩深度图像转换为低色彩深度图像的图像处理算法。
其基本原理是通过设定阈值并比较像素灰度值,将图像像素转换为黑色或白色,并通过误差传播来减少抖动带来的伪影。
图像处理面试题

图像处理面试题在图像处理领域,面试官通常会问到一些基础知识和技术实践相关的问题。
以下是一些常见的图像处理面试题及其答案,供您参考。
1. 图像处理的定义是什么?图像处理是指对数字图像进行一系列的处理操作,以改善或增强图像的质量、提取感兴趣的信息、实现图像的压缩等目的。
图像处理可以应用于医学影像、数字摄影、计算机视觉等领域。
2. 什么是图像的灰度?图像的灰度是指每个像素点的亮度级别,也可以理解为图像的黑白程度。
在灰度图像中,亮度值通常从0(黑色)到255(白色)。
3. 图像处理中的直方图是什么?直方图是一种统计图表,用来表示图像中每个亮度级别的像素数量。
通过分析图像的直方图,可以了解图像的亮度分布情况,进而进行亮度调整、对比度增强等操作。
4. 图像的平滑处理是什么?图像的平滑处理是指通过一定的滤波方法,减少图像中的噪声并使图像变得更加光滑。
常用的平滑滤波器包括均值滤波器和高斯滤波器。
5. 图像的边缘检测是什么?图像的边缘检测是指通过一定的算法,找到图像中亮度变化较大的区域,即物体的边界。
常用的边缘检测算法包括Sobel、Canny等。
6. 什么是图像的二值化?图像的二值化是将图像转换为只有两个亮度值的图像,通常为黑色和白色。
二值化可以根据像素的亮度值进行阈值划分,对图像进行分割,常用于图像分割、目标提取等领域。
7. 什么是图像的缩放?图像的缩放是指改变图像的尺寸大小,包括放大和缩小。
缩放可以通过插值算法实现,常用的插值算法有最近邻插值、双线性插值等。
8. 图像的旋转是什么?图像的旋转是指改变图像的角度,使图像在平面内进行旋转变换。
旋转可以通过旋转矩阵实现,通过矩阵运算将原始图像的像素点映射到旋转后的位置。
9. 图像的特征提取是什么?图像的特征提取是指从图像中提取出具有代表性的特征,用于图像分类、目标识别等任务。
常用的图像特征包括颜色直方图、纹理特征、形状特征等。
10. 什么是卷积神经网络(CNN)?卷积神经网络是一种基于深度学习的图像处理算法,通过多层卷积和池化层进行图像特征提取和分类。
mmsegmentation 阈值

mmsegmentation 阈值【原创版】目录1.阈值的概念2.MMsegmentation 的概述3.MMsegmentation 中阈值的作用4.如何选择合适的阈值5.阈值对 MMsegmentation 效果的影响6.结论正文1.阈值的概念在图像处理领域,阈值是指一个数值,将图像中的像素点分为两个或多个区域。
这些区域通常具有不同的特征,如颜色、纹理等。
阈值处理是图像分割的一种方法,可以将图像中具有相似特征的像素点归为一类。
2.MMsegmentation 的概述MMsegmentation(多模态图像分割)是一种基于深度学习的图像分割方法。
它通过结合不同模态的图像信息(如 RGB、深度、纹理等),实现对图像的高精度分割。
相较于传统的图像分割方法,MMsegmentation 具有更好的性能和鲁棒性。
3.MMsegmentation 中阈值的作用在 MMsegmentation 中,阈值主要用于对图像特征进行二值化处理,以便更好地进行像素级别的分割。
通过调整阈值,可以控制分割的精度和速度。
合适的阈值能够提高分割效果,而不合适的阈值可能导致过拟合或欠拟合问题。
4.如何选择合适的阈值选择合适的阈值是 MMsegmentation 中的关键步骤。
一般而言,可以选择以下几种方法:(1)经验阈值:根据实际需求和经验,直接设定一个阈值。
(2)Otsu"s 方法:根据图像的灰度分布,自动计算最优阈值。
(3)基于模型的方法:通过训练一个模型,如深度学习模型,自动学习合适的阈值。
5.阈值对 MMsegmentation 效果的影响阈值对 MMsegmentation 效果具有重要影响。
合适的阈值可以使分割结果更加精确,而不合适的阈值可能导致以下问题:(1)过拟合:当阈值设置过高时,可能导致分割结果过于复杂,无法反映实际场景。
(2)欠拟合:当阈值设置过低时,可能导致分割结果过于简单,无法捕捉到图像的细节信息。
图像变化检测方法

图像变化检测方法图像变化检测是指通过对图像序列进行分析和比较,找出其中发生变化的部分。
图像变化检测技术在实际应用中具有广泛的应用,比如视频监控、遥感图像分析、医疗影像等领域。
本文将介绍几种常见的图像变化检测方法。
传统的图像变化检测方法主要包括基于阈值的方法、基于差异图的方法和基于特征提取的方法。
基于阈值的方法是最简单和最直接的图像变化检测方法之一。
该方法首先将图像序列中的两幅图像进行灰度化处理,然后将它们进行像素级别的比较。
如果两个像素值之差超过设定的阈值,则认为该像素发生了变化。
这种方法适用于背景复杂的环境,但对光照变化和噪声比较敏感。
基于差异图的方法是将两个图像的差异性信息表示为一幅差异图。
该方法先将图像序列进行灰度化处理,然后进行像素级别的差值计算,得到差异图。
在差异图中,像素值较大的区域表示发生了较大的变化。
通过设定一个阈值,可以将变化和不变化的区域进行分割。
这种方法对光照变化和噪声具有一定的鲁棒性,但对于复杂背景下的图像变化检测效果不佳。
基于特征提取的方法是利用图像序列中的特征来进行变化检测。
特征可以是结构、纹理、颜色或运动等方面的特征。
该方法首先对图像序列进行特征提取,然后利用机器学习算法进行分类。
在训练阶段,通过对已知的变化和不变化样本进行学习,建立分类器。
在测试阶段,将待检测的图像序列输入分类器,即可得到变化和不变化的结果。
这种方法的优点是可以适应复杂的背景和光照变化,但需要大量的样本进行训练,并且计算复杂度较高。
近年来,随着深度学习的发展,基于深度学习的图像变化检测方法也逐渐受到关注。
深度学习通过多层神经网络的训练,可以自动地从图像数据中学习到特征表示,从而提高图像变化检测的准确性和鲁棒性。
目前,基于深度学习的图像变化检测方法主要有卷积神经网络(CNN)和循环神经网络(RNN)。
卷积神经网络在图像变化检测中的应用主要体现在特征提取方面。
它通过多层卷积和池化操作,可以从图像数据中提取出不同的特征层次。
灰度图像二值化处理
内蒙古科技大学本科毕业论文二〇一二年四月摘要本文介绍了图像及数字图像处理技术的一些概念和相关知识;还介绍了灰度图像和图像二值化的概念及其表示形式;对图像灰度化和图像二值化的优缺点作了简单的的介绍;重点介绍了灰度图像的二值化方法研究,其包括的内容有二值化研究动态和研究方法;对全局阈值法;局部阈值法这两种方法进行了研究讨论。
关键字:图像处理、二值化、图像、阈值AbstractThis paper introduces the image and digital image processing technology of some concepts and related knowledge; also introduced the gray-scale image and the images of the two values of the concept and its representation; grayscale images and images of the two values of the advantages and disadvantages to make simple introduction; mainly introduces two gray image binarization method, its includes the contents of two values of research and research methods; the global threshold method; local threshold method, the two methods are discussed. Keywords:image processing, image, threshold value of two,目录引言 (5)1.灰度图像与二值图像 (6)1.1图像 (6)1.2数字图像 (6)1.2.1彩色图像 (6)1.2.2灰度图像 (7)1.2.3二值图像 (7)2.灰度图像二值化方法研究 (8)2.1全局阈值法 (8)2.1.1全局阈值法的概念 (8)2.1.2全局阈值法的方法 (9)2.1.3全局阈值法的优缺点介绍及阈值选取 (11)2.2局部阈值法 (11)2.2.1局部阈值法的概念 (11)2.2.2局部阈值法的方法 (12)2.2.3局部阈值法的优缺点介绍 (12)3.灰度图像二值化的应用 (12)结束语 (14)参考文献 (15)致谢 (16)引言图像二值化是图像处理中的一项基本技术,也是很多图像处理技术的预处理过程。
二值化

用于显示的灰度图像通常用每个采样像素8 bits的非线性尺度来保存,这样可以有256种灰度(8bits就是2 的8次方=256)。这种精度刚刚能够避免可见的条带失真,并且非常易于编程。在医学图像与遥感图像这些技术 应用中经常采用更多的级数以充分利用每个采样10或12 bits的传感器精度,并且避免计算时的近似误差。在这 样的应用领域流行使用16 bits即个组合(或种颜色)。
根据阈值选取的不同,二值化的算法分为固定阈值和自适应阈值。比较常用的二值化方法则有:双峰法、P 参数法、迭代法和OTSU法等。
图像分割
图像分割
在计算机视觉领域,图像分割(Segmentation)指的是将数字图像细分为多个图像子区域(像素的集合) (也被称作超像素)的过程。图像分割的目的是简化或改变图像的表示形式,使得图像更容易理解和分析。图像 分割通常用于定位图像中的物体和边界(线,曲线等)。更精确的,图像分割是对图像中的每个像素加标签的一 个过程,这一过程使得具有相同标签的像素具有某种共同视觉特性。
二值图像
二值图像
二值图像是每个像素只有两个可能值的数字图像。人们经常用黑白、B&W、单色图像表示二值图像,但是也 可以用来表示每个像素只有一个采样值的任何图像,例如灰度图像等。
二值图像经常出现在数字图像处理中作为图像掩码或者在图像如激光打印机、传真机、单色计算机显示器等都可以处理二值图像。
图像分割的结果是图像上子区域的集合(这些子区域的全体覆盖了整个图像),或是从图像中提取的轮廓线 的集合(例如边缘检测)。一个子区域中的每个像素在某种特性的度量下或是由计算得出的特性都是相似的,例 如颜色、亮度、纹理。邻接区域在某种特性的度量下有很大的不同。
基于飞行时间深度图像变化率的火焰识别方法

基于飞行时间深度图像变化率的火焰识别方法韩郁翀,秦俊,马兴鸣,赵兰明,李雨农(中国科学技术大学火灾科学国家重点实验室,安徽合肥230027)摘要:为开发飞行时间算法在火灾探测中的应用,简化算法,提高检测速率和准确性,根据飞行时间法,结合火焰的深度图特征,设计了基于深度图像变化率的火焰识别算法。
以三维深度相机为主要图像捕获设备,进行了多组火焰识别实验,包括正庚烷火焰、乙醇火焰、纸张火焰、灯光干扰、行人干扰实验,对捕获的图像进行了处理与计算,提出了识别火焰的简化算法和火焰像素估计模型。
采用该方法分析了火焰深度图特征,火焰识别结果图像的频谱图特征、集中度特征以及面积变化特征。
研究结果表明,采用文中提出的算法的实验识准率大于91.5%,误识率小于3.8%,能有效识别火焰。
关键词:火焰识别;深度图;飞行时间;火灾探测中图分类号:X913.4;T P391.41文献标志码:A文章编号:1007-2276(2014)01-0338-07Identification of fire flame based on variation rate oftime-of-flight-depth-map methodHan Yu ch on g,Qin Jun,M a Xin g mi ng,Zh ao L an min g,Li Yu no ng(Stat e Key Labo rato ry of Fi re Sci en ce,Univ ersity of S cie nc e and Te ch nology of China,He fei230027,China)Ab s tr act: In ord er t o dev e l op t he ap plication of t im e-of-f l ight al gorith m in fire d e t e ct ion an d simplify t he al gorith m t o im pr ov e de t e ct ion r at e an d accu r acy,accor din g t o t he t im e-of-f l ight-depth-m ap m e t hod, co nsid erin g with t he ch ar act eristics of d epth m ap of fire f l am e,fire f l am e identificatio n al go rith m b as ed on variation r at e of t im e-of-f l ight-depth-m ap was desig n ed.Sever al grou ps of fire f l am e identification ex p eri m ents,incl udin g n-h ept an e f l ame,e t h an ol f l ame,pap er f l ame, l am plight interf eren ce and ped estrian interf eren ce t est,were carri ed out with3-D depth cam er a act ed as m ai n equip m ent.T h e capt ured m aps were pro cess ed an d co m put ed.A sim plified al go rith m was pro p osed fo r fire f l am e identification which was used t o anal yze t he ch ar act eristics of d ept h m ap,fr eq u en cy spe ct rog r am,co n centr at ion r at io an d ar e a f l uct uatio n of fire f l am e.Th e res ul t s indi cat e t hat t he identification pr ecision r at e is gre at er t han91.5%, an d t h e misr eco gnition r at e i s l ess t han3.8%.Fire f l am e coul d b e effi cient l y identified wit h t his al g orithm. Key wo r ds: fire f l am e id entification;depth m ap;t ime of f l ight;fire de t e ct ion收稿日期:2013-05-12;修订日期:2013-06-19基金项目:国家自然科学基金(51276176);国家科技支撑计划(2011B AK03B02)作者简介:韩郁翀(1989-),女,硕士生,主要从事火灾科学与技术方面的研究。
C图片二值化处理位深度位深度
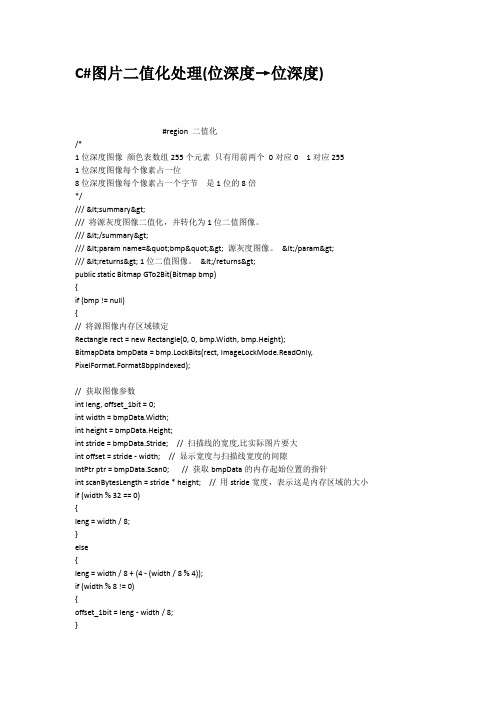
C#图片二值化处理(位深度→位深度)#region 二值化/*1位深度图像颜色表数组255个元素只有用前两个0对应0 1对应2551位深度图像每个像素占一位8位深度图像每个像素占一个字节是1位的8倍*//// <summary>/// 将源灰度图像二值化,并转化为1位二值图像。
/// </summary>/// <param name="bmp"> 源灰度图像。
</param>/// <returns> 1位二值图像。
</returns>public static Bitmap GTo2Bit(Bitmap bmp){if (bmp != null){// 将源图像内存区域锁定Rectangle rect = new Rectangle(0, 0, bmp.Width, bmp.Height);BitmapData bmpData = bmp.LockBits(rect, ImageLockMode.ReadOnly, PixelFormat.Format8bppIndexed);// 获取图像参数int leng, offset_1bit = 0;int width = bmpData.Width;int height = bmpData.Height;int stride = bmpData.Stride; // 扫描线的宽度,比实际图片要大int offset = stride - width; // 显示宽度与扫描线宽度的间隙IntPtr ptr = bmpData.Scan0; // 获取bmpData的内存起始位置的指针int scanBytesLength = stride * height; // 用stride宽度,表示这是内存区域的大小if (width % 32 == 0){leng = width / 8;}else{leng = width / 8 + (4 - (width / 8 % 4));if (width % 8 != 0){offset_1bit = leng - width / 8;}else{offset_1bit = leng - width / 8;}}// 分别设置两个位置指针,指向源数组和目标数组int posScan = 0, posDst = 0;byte[] rgbValues = new byte[scanBytesLength]; // 为目标数组分配内存Marshal.Copy(ptr, rgbValues, 0, scanBytesLength); // 将图像数据拷贝到rgbValues中// 分配二值数组byte[] grayValues = new byte[leng * height]; // 不含未用空间。
基于深度学习的图像分类研究综述

的突破,通过自动学习图像特征,深度学习技术能够显著提高图像分类的性 能。
文献综述
深度学习在图像分类中的应用主要包括神经网络、卷积神经网络和循环神经 网络等。下面将对这几种方法进行详细介绍。
1、神经网络
神经网络是一种广泛用于图像分类的深度学习方法。该方法通过组合简单的 人工神经元来构建复杂的模型,从而对图像进行分类。神经网络的优点在于它具 有强大的特征学习能力,能够自动提取图像中的关键特征。然而,神经网络也存 在着模型复杂度高、参数调整困难等问题。
一、引言
乳腺癌病理图像包含丰富的疾病信息,如肿瘤的大小、形态、细胞核染色质 变化等。传统的病理图像分析主要依赖于手动标注和经验判断,不仅耗时耗力, 而且容易引入主观误差。深度学习技术的出现,使得机器能够自动学习和识别病 理图像中的特征,提高图像分析的准确性和效率。
二、深度学习技术
深度学习是机器学习的一个分支,其基本原理是通过建立多层神经网络来模 拟人脑神经网络的运作方式。在图像处理中,深度学习通常采用卷积神经网络 (CNN)来提取图像特征。乳腺癌病理图像分类常用的深度学习模型包括卷积神 经网络(CNN)
、循环神经网络(RNN)、长短期记忆网络(LSTM)和生成对抗网络(GAN) 等。
三、基于深度学习的乳腺癌病理 图像分类研究
1、预处理与数据集
乳腺癌病理图像通常包含大量的背景和噪声,因此需要进行预处理,如灰度 化、二值化、分割等。此外,为了训练深度学习模型,需要构建大规模的高质量 标注数据集。常用的乳腺癌病理图像数据集包括ISBI、MICCAI、CAMDA等。
3、实验评估与对比
为了验证深度学习模型的有效性,需要进行实验评估与对比。常用的评估指 标包括准确率、召回率、F1分数等。同时,还需要与其他传统方法进行对比,以 证明深度学习在乳腺癌病理图像分类中的优越性。
图像分析:二值图像连通域标记
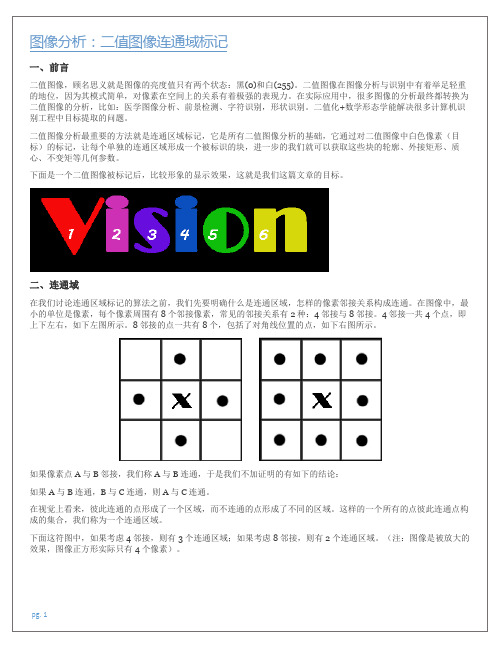
二、连通域
如果像素点A与B邻接,我们称A与B连通,于是我们不加证明的有如下的结论:
三、连通区域的标记
第一行,我们得到两个团:[2,6]和[10,13],同时给它们标记1和2。
下面是这个过程的C++实现,每个等价表用一个vector<int>来保存,等价对列表保存在map<pair<int,int>>里。
整个算法步骤,我们只扫描了一次图像,同时我们对图像中的像素进行标记,要么赋予一个新的标号,要么用它同行P点。
最后不要忘了把C的值加1。
这个过程如下面图像S1中所示。
情况3
1)如果P是外轮廓的起点,也就是说我们是从P点开始跟踪的,那么我们从7号(右上角)位置P1P1开始,看7号在L上标记为一个负值。
如下图所示,其中右图像标记的结果。
2)那么如果P是不是外轮廓的起点,即P是外轮廓路径上的一个点,那么它肯定是由一个点进入的,我们设置为P−
在OpenCV中查找轮廓的函数已经存在了,而且可以得到轮廓之间的层次关系。
这个函数按上面的算法实现起来并不。
图像处理算法与应用指南
图像处理算法与应用指南第一章:图像处理算法的基本概念与原理图像处理算法是指对图像进行数字化处理、分析和解释的方法和技术。
它涉及到图像的获取、预处理、特征提取、目标识别等多个方面。
本章将介绍图像处理算法的基本概念和原理。
1.1 图像处理算法的定义图像处理算法是一种将输入图像映射为输出图像的计算方法。
它根据图像的特征和要求,通过一系列的数学操作和计算,对图像进行处理和分析,从而提取出所需要的信息。
1.2 图像处理算法的流程图像处理算法的流程一般包括图像获取、图像预处理、特征提取、目标识别等步骤。
首先需要获取待处理的原始图像,然后对图像进行去噪、增强、滤波等预处理操作,接着提取图像的特征,通过特征匹配、边缘检测等方法实现目标的识别和分析。
1.3 常见的图像处理算法常见的图像处理算法包括二值化算法、灰度变换算法、直方图均衡化算法、边缘检测算法、形态学运算算法等。
二值化算法将图像转换为黑白两色,灰度变换算法用于调整图像的亮度和对比度,直方图均衡化算法用于优化图像的亮度分布,边缘检测算法用于提取图像中的轮廓和边缘特征,形态学运算算法用于图像的膨胀、腐蚀、开运算和闭运算等操作。
第二章:图像处理算法在图像增强中的应用图像增强是图像处理的一个重要领域,通过改善图像的质量和视觉效果,提高图像在后续处理和分析中的可用性。
本章将介绍图像处理算法在图像增强中的应用。
2.1 图像去噪算法图像去噪算法旨在消除图像中的噪声,提高图像的清晰度和细节保留能力。
常见的图像去噪算法包括均值滤波、中值滤波、高斯滤波等。
均值滤波算法通过计算像素周围区域的均值来平滑图像,中值滤波算法通过计算像素周围区域像素的中值来去除孤立的噪点,高斯滤波算法则通过卷积运算来模拟图像的模糊效果。
2.2 图像增强算法图像增强算法旨在提高图像的对比度、亮度和细节等方面的视觉效果。
常见的图像增强算法包括直方图均衡化算法、对比度拉伸算法、小波变换算法等。
直方图均衡化算法通过调整图像的像素值分布来增强图像的对比度,对比度拉伸算法通过调整图像的像素值范围来增强图像的亮度和对比度,小波变换算法将图像分解为多个频带进行增强。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.2 深度图像二值化图像二值化是图像处理中的一项基本技术,也是很多图像处理技术的预处理过程。
在颗粒分析、模式识别技术、光学字符识别(OCR)、医学数据可视化中的切片配准等应用中,图像二值化是它们进行数据预处理的重要技术。
由于图像二值化过程将会损失原图像的许多有用信息,因此在进行二值化预处理过程中,能否保留原图的主要特征非常关键。
在不同的应用中,图像二值化时阈值的选择是不同的。
因此,自适应图像阈值的选取方法非常值得研究。
研究者对图像二值化方法进行了讨论,在此基础上提出了一个新的图像二值化算法。
该算法基于数学形态学理论,较好地保留了图像二值化时原图的边缘特征。
本文主要研究二值化及灰度图像二值化方法。
3.2.1.灰度图像与二值图像数字图像是将连续的模拟图像经过离散化处理后得到的计算机能够辨识的点阵图像。
在严格意义上讲,数字图像是经过等距离矩形网格采样,对幅度进行等间隔量化的二维函数。
因此,数字图像实际上就是被量化的二维采样数组。
一幅数字图像都是由若干个数据点组成的,每个数据点称为像素(pixel)。
比如一幅256×400,就是指该图像是由水平方向上256列像素和垂直方向上400行像素组成的矩形图。
每一个像素具有自己的属性,如颜色(color)、灰度(grayscale)等,颜色和灰度是决定一幅图像表现里的关键因素。
数字图像又可分为彩色图像、灰度图像、二值图像。
3.2.1.1彩色图像彩色图像是多光谱图像的一种特殊情况,对应于人类视觉的三基色即红(R)、绿(G)、蓝(B)三个波段,是对人眼的光谱量化性质的近似。
彩色图像中的每个像素的颜色有R、G、B三个分量决定,而每个分量有255种值可取,这样一个像素点可以有1600多万的颜色的变化范围。
而灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,一个像素点的变化范围为255种。
图1-1为彩色图像。
图1-13.2.1.2灰度图像灰度图像是指只含亮度信息,不含色彩信息的图像。
单纯的看,灰度图也是黑白的,就像黑白电视显示的图像一样,但是点与点之间黑的程度是不一样的、这就是深度。
如果称不同深度的颜色为一色的话,灰度图像就不止只有黑色和白色两种颜色,一般使用的灰度图为256级灰度图,就是说图像由256种不同灰度级的颜色组成。
图像灰度化的效果如图1-2。
图1-2灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围为255种。
YUV是编译颜色空间的种类,“Y”表示明亮度“U”表示色度“V”表示浓度,根据YUV的颜色空间,Y的分量的物理意义是点的亮度,由该值反映亮度等级,根据RGB和YUV颜色空间的变化关系可建立亮度Y与R、G、B 三个颜色分量的对应:Y=0.3R+0.59G+0.11B (1-1)以这个亮度值表达图像的灰度值。
3.2.1.3二值图像二值图像就是指只有两个灰度级的图像,二值图像具有存储空间小,处理速度快,可以方便地对图像进行布尔逻辑运算等特点。
更重要的是,在二值图像的基础上,还可以进一步对图像处理,获得该图像的一些几何特征或者其他更多特征。
在图像相关方面,用二值图像进行相关比用灰度级图像进行相关有更好的相关性能和去噪作用。
在用硬件实现时可避免乘法运算,从而提高硬件系统的速度和降低成本。
在图像的符号匹配方面,二值图像比灰度级图像更适合于用符号来表达。
二值图既保留了原始图像的主要特征,又使信息量得到了极大的压缩。
图1-3为二值图像。
图1-33.2.2 灰度图像二值化方法研究图像二值化是图像处理中的一项基本技术,也是很多图像处理技术的预处理过程。
图像的预处理在进行图像二值化操作前要对图像进行预处理,包括彩色图像灰化和增强。
由于选取阈值需要参照直方图,因此在图像进行处理后,我们再获取图像的直方图以帮助选取阈值。
整个流程如下所示:读取图像→灰度图像→图像增强→图像直方图→二值化处理图像二值化是图像数据预处理的重要技术,如果二值化过程中阈值选取不当会损失原图像的许多有用信息。
图像二值化处理的方法包括全局阈值法、局部阈值法。
3.2.2.1全局阈值法3.2.2.2全局阈值法的概念全局阈值法是指在二值化过程中只使用一个全局阈值T的方法。
它将图像的每个像素的灰度值与T进行比较,若大于T,则取为前景色(白色);否则,取为背景色。
根据文本图像的直方图或灰度空间分布确定一个阈值,以此实现灰度文本图像到二值图像的转化,其中全局阈值法又可分为基于点的阈值法和基于区域的阈值法。
阈值分割法的结果很大程度上依赖于对阈值的选择,因此该方法的关键是如何选择合适的阈值。
选择不同的初始灰度也会产生不一样的二值化图像,图2—1 所示3 幅图像则是分别采取T=109,T=127,T=155 三种初始值对Lena 进行基本全局门限二值化后的图像。
可以看出效果都不一样。
因此要获得最佳效果,必须要考虑选择一个好的初始T 值。
另外使用迭代法虽然能得到很精确的阈值,但是也占用了大量的时间,即时间复杂度比较高,效率较其他算法低。
图2—13.2.2.3全局阈值法的方法典型的全局阈值法包括Otsu方法、最大熵方法等。
全局阈值法算法简单,对于目标和背景明显分离、直方图分布呈双峰的图像效果良好,但对于由于光照不均匀、噪声干扰较大等原因使直方图分布不呈双峰的图像,二值化效果明显变差。
下面重点介绍Otsu方法:Otsu方法是一种全局化的动态二值化方法,又叫大津法,还称为最大类间差发,是基于整幅图像的统计征,实现阈值的自动选取。
其原理是把图像直方图用某一灰度值分割成两类,分别计算这两类的像素点数和灰度平均值,然后计算它们的类间方差。
当被分割成的两类间方差最大时,此灰度值就作为图像二值化处理的阈值。
大津法的使用范围比较广,不论图像的直方图有无明显的双峰,都能得到较满意的结果,在很多领域得到了应用和发展。
对图像Image ,记t 为目标与背景的分割阈值,目标像素数占图像比例为0ω,平均灰度为0μ;背景像素数占图像比例为1ω,平均灰度为1μ。
图像的总平均灰度为:)()()()(1100t t t t μωμωμ+=。
从最小灰度值到最大灰度值遍历t ,当t 使得值211200)()(μμωμμω-+-=g 最大时t 即为分割的最佳阈值。
对大津法可作如下理解:该式实际上就是类间方差值,阈值t 分割出的目标和背景两部分构成了整幅图像,而目标取值0μ,概率为 0ω,背景取值1μ,概率为1ω,总均值为μ,根据方差的定义即得该式。
因方差是灰度分布均匀性的一种度量,方差值越大说明构成图像的两部分差别越大,当部分目标点错分为背景或部分背景点错分为目标点都会导致两部分差别变小,因此使类间方差最大的分割意味着错分概率最小。
记),(j i f 为M N ⨯图像),(j i 点处的灰度值,灰度级为μ,不妨假设),(j i f 取值]1,0[-m 。
记)(k p 为灰度值为k 的频率,则有:∑==k j i f MN k p ),(11)( (2-1)假设用灰度值t 为阈值分割出的目标与背景分别为:}),({t j i f ≤和}),({t j i f >,于是目标部分比例:∑≤≤=t i i p t 00)()(ω, (2-2)目标部分点数:∑≤≤=ti i p MN t N 00)( )( (2-3)背景部分比例:∑-≤<=11)()(m i t i p t ω (2-4)背景部分点数:∑-≤<=11)()(m i t i P MNt N (2-5) 目标均值:∑≤≤=ti t i ip t 000)(/)()(ωμ (2-6) 背景均值:∑-≤<=111)(/)()(m i t t i ip t ωμ (2-7)总均值:)()()()(1100t t t t μωμωμ+= (2-8) 大津法指出求图像最佳阈值g 的公式为:]))(()())(()([ 2112001-m t 0μμωμμω-+-=≤≤t t t t Max Arg g (2-9) 该式右边括号内实际上就是类间方差值,阈值g 分割出的目标和背景两部分构成了整幅图像,而目标值)(0t μ,概率为)(1t ω,背景取值)(1t μ,概率为)(0t ω,总均值为μ,根据方差的定义即得该式。
因方差是灰度分布均匀性的一种度量,方差值越大,说明构成图像的两部分差别越大,当部分目标错分为背景或部分背景错分为目标都会导致两部分差别变小,因此使类间方差最大的分割意味着错分概率最小,这便是大津法的真正含义。
其实,换一种思想也能很好的理解大津方法。
)(0t μ和)(1t μ,可以分别代表目标和背景的中心灰度,μ则代表整幅图像的中心灰度,要使目标和背景得到最好的分割,当然希望分割出的目标尽量远离图像中心,即20))((μμ-t 或|)(|0μμ-t 尽量大,背景也尽量远离中心,即21))((μμ-t 或|)(|1μμ-t 尽量大,由于希望两者都大,于是有:(1) 两者之加权和最大:]))(()())(()([ 2112001-m t 0μμωμμω-+-=≤≤t t t t Max Arg g (2-10) (2) 两者之积最大:]))(())(([ 21201-m t 0μμμμ--=≤≤t t Max Arg g (2-11) 注意到有)()()()(1100t t t t μωμωμ+=,且)()(10t t μμμ≤≤,因此有:2120211200))(())(())(()())(()(μμμμμμωμμω--=-+-t t t t t t 。
可见是二者等价的。
图2-2为灰度图像由Otsu 方法得到的二值图像。
原图 Otsu 方法得到的二值图像 图2-23.2.2.4 全局阈值法的优缺点介绍及阈值选取全局阈值方法依然存在一些不足,主要表现在:若目标与背景之间灰度差不明显,可能出现大块黑色区域,甚至丢失整幅图像的信息;仅利用一维灰度直方图分布,没有结合图像的空间相关信息,处理效果不好;当图像中有断裂现象或者背景有一定噪声时,无法得到预期效果。
为了满足图像处理应用系统自动化及实时性要求,图像二值化的阈值的选择最好由计算机自动来完成。
下面列举几个阈值的自动选择算法;(1)平均灰度值法以图像中所有像素灰度值的平均值为阈值。
(2)大津法:又称最大类间差发,和上文中的Otsu 方法相同。
(3) 边缘算子法;采用Laplace 算子、Robert 算子、Sober 算子等对像素点进行灰度级增强或减弱的变换。
对于灰度均匀分布的区域内的像素点,这些算子对其进行灰度减弱;对于在边缘附近的像素点,这些算子对其进行灰度增强。
3.2.3 局部阈值法3.2.3.1局部阈值法的概念局部阈值法是用像素灰度值和此像素邻域的局部灰度特性来确定该像素的阈值的,当照明不均匀,有突发噪声,或者背景灰度变化较大时,局部阈值确定技术必须根据像素的坐标位置关系自动确定不同阈值,实施动态的自适应二值化处理。