数字图像处理(冈萨雷斯)-2 数字图像处理基础
数字图像处理 第三版 (冈萨雷斯,自己整理的2)
1. 数字数据传输通常用波特率度量,其定义为每秒钟传输的比特数。
通常的传输是以一个开始比特,一个字节(8 比特)的信息和一个停止比特组成的包完成的。
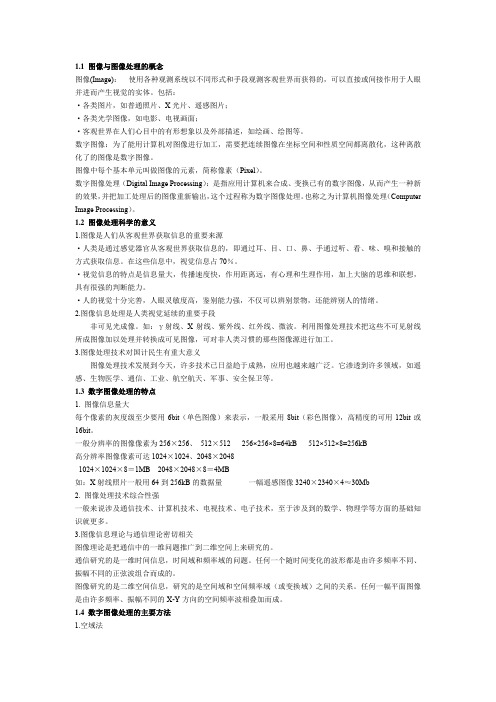
基于这个概念回答以下问题:(a) 用56K 波特的调制解调器传输一幅1024×1024、256 级灰度的图像需要用几分钟?(b) 以750K 波特[这是典型的电话DSL(数字用户线)连接的速度]传输要用多少时间?解:(a)T=M/56000=(1024×1024)×(8+2)/56000=187.25s=3.1min(b) T=M/56000=(1024×1024)×(8+2)/750000=14s2.两个图像子集S1和S2图下图所示。
对于V={1},确定这两个子集是(a)4-邻接,(b)8-邻接,(c)m-邻接。
a) S1 和S2 不是4 连接,因为q 不在N4(p)集中。
(b) S1 和S2 是8 连接,因为q 在N8(p)集中。
(c) S1 和S2 是m 连接,因为q 在集合N D(p)中,且N4(p)∩ N4(q)没有V 值的像素3. 考虑如下所示的图像分割(a) 令V={0,1}并计算p 和q 间的4,8,m 通路的最短长度。
如果在这两点间不存在特殊通路,试解释原因。
(b) 对于V={1,2}重复上题。
解:(a) 当V={0,1}时,p 和q 之间不存在4 邻接路径,因为不同时存在从p 到q 像素的4 毗邻像素和具备V 的值,如图(a)p 不能到达q。
8 邻接最短路径如图(b),最短长度为4。
m邻接路径如图(b)虚线箭头所示,最短长度为5。
这两种最短长度路径在此例中均具有唯一性。
(b) 当V={1, 2}时,最短的4 邻接通路的一种情况如图(c)所示,其长度为6,另一种情况,其长度也为6;8 邻接通路的一种情况如图(d)实线箭头所示,其最短长度为4;m 邻接通路的一种情况如图(d)虚线箭头所示,其最短长度为6.或解: (1) 在V={0,1}时,p和q之间通路的D4距离为∞,D8距离为4,Dm距离为5。
数字图像处理第二章课后习题及中文版解答

数字图像处理(冈萨雷斯版,第二版)课后习题及解答(部分)Ch 22.1使用2.1节提供的背景信息,并采用纯几何方法,如果纸上的打印点离眼睛0.2m 远,估计眼睛能辨别的最小打印点的直径。
为了简明起见,假定当在黄斑处的像点变得远比视网膜区域的接收器(锥状体)直径小的时候,视觉系统已经不能检测到该点。
进一步假定黄斑可用1.5mm × 1.5mm 的方阵模型化,并且杆状体和锥状体间的空间在该阵列上的均匀分布。
解:对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即()()220.20.014d x = 解得x =0.07d 。
根据2.1节内容,我们知道:如果把黄斑想象为一个有337000个成像单元的正方形传感器阵列,它转换成一个大小580×580成像单元的阵列。
假设成像单元之间的间距相等,这表明在总长为1.5 mm 的一条线上有580个成像单元和579个成像单元间隔。
则每个成像单元和成像单元间隔的大小为s =[(1.5 mm)/1159]=1.3×10-6 m 。
如果在黄斑上的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。
换句话说,眼睛不能检测到以下直径的点:x =0.07d<1.3×10-6m ,即d <18.6×10-6 m 。
下图附带解释:因为眼睛对近处的物体聚焦时,肌肉会使晶状体变得较厚,折射能力也相对提高,此时物体离眼睛距离0.2 m ,相对较近。
而当晶状体的折射能力由最小变到最大时,晶状体的聚焦中心与视网膜的距离由17 mm 缩小到14 mm ,所以此图中选取14mm(原书图2.3选取的是17 mm)。
图 题2.12.2 当在白天进入一个黑暗的剧场时,在能看清并找到空座位时要用一段时间适应,2.1节(视觉感知要素)描述的视觉过程在这种情况下起什么作用?解:根据人眼的亮度适应性,1)由于户外与剧场亮度差异很大,因此当人进入一个黑暗的剧场时,无法适应如此大的亮度差异,在剧场中什么也看不见;2)人眼不断调节亮度适应范围,逐渐的将视觉亮度中心调整到剧场的亮度范围,因此又可以看见、分清场景中的物体了。
数字图像处理课件(冈萨雷斯第三版)_图文

图像数据文件主要是用光栅形式,即图像是一些图像点 的集合,比较适合变化复杂的图像。它的主要缺点是缺少 对象和像素点之间的联系,且在伸缩图像的过程中图像会 改变。例如,常见的图象文件类型有bmp,jpg等等。图象 处理的程序必须考虑图象文件的格式,否则无法正确地打 开和保存图象文件。
pgm格式
美国的许多大学用pgm格式,避免使用压缩文件格式,对 初学者来说是很方便的。下面是一幅该格式的图象。
补充:图象和视觉基础
2.1 概论和综述 2.2 人眼与亮度视觉 2.3 颜色视觉 2.4 光度学和成象模型 2.5 成象变换 2.6 采样和量化 2.7 象素间联系 2.8 算术和逻辑运算 2.9 坐标变换
第2章 图象和视觉基础
2.1 概论和综述
该基础包括视觉基础、成像基础和图像基础三部分 :
0x36 0x34 0x30 0x20 0x34
0x38 0x30 0x0A 表示640(SP)480(LF);
0x32 0x35 0x35 0x0A ………………………………… 表示255(LF) ………………………………… 0x27 0x27 …
表示23, 23,…(像素灰度值)
这幅图象文件的解码:
下面是一个Matlab程序
% 打开蝴蝶图象,进行Fourier变换 h=imread('butterfly.jpg'); % open an image figure; imshow(h); % 因为图像的格式uint8不能做加减法, % 所以需要把格式uint8变成格式double h=double(h); [m,n,p]=size(h); hf=fftshift(fft2(h)); % 2D Fourier变换, 得到2D复数值图像 hfa=log(abs(hf)); % 模的图像,用log来调整灰度的对比度 % 求出模的灰度最大值,从而把其灰度的值域变为[0,255] m=max(max(max(hfa))); hfa=hfa*255/m; figure; imshow(uint8(hfa)); Imwrite(uint8(hfa),’butterfly_fft.jpg’,’jpg’);
数字图像处理-冈萨雷斯-课件英文02Eng数字图像基础

10 10 16 28
139525362124251655398655762950812440573689765496500533267659728594364476639723
78 67 92 99
Visual Perception: Human Eye
Output
Image Sensor: How CCD works
i hg f ed cba
Horizontal transport register
Image pixel
i hg f ed cba
i hg f ed
Vertical shift
Horizontal shift
c b a Output
Visible Spectrum
(Images from Rafael C. Gonzalez and Richard E. Wood, Digital Image Processing, 2nd Edition.
Image Sensors
Single sensor Line sensor
Array sensor
(Images from Rafael C. Gonzalez and Richard E. Wood, Digital Image Processing, 2nd Edition.
(Picture from Microsoft Encarta 2000)
Brightness Adaptation of Human Eye : Mach Band Effect
Digital Image Processing
Chapter 2: Digital Image Fundamental
6 June 2007
数字图像处理课件冈萨雷斯第三版
形状分析
介绍形状分析的方法和技术,如周长、面积、轮廓等,以量化和比较图像中的不同形状。
图像压缩基础
讲解图像压缩的基本原理和方法,如有损压缩、无损压缩等,以降低图像文件的大小。
离散傅立叶变换及其应用
探索离散傅立叶变换(DFT)的概念和应用,如频域滤波、图像复原等。
频域滤波
讨论频域滤波的方法和技巧,如低通滤波、高通滤波等,以增强或去除特定频率的图像信息。
灰度变换
介绍灰度变换的概念和方法,如对比度调整、亮度调整等,以改善图像的可视化效果。
直方图均衡化
讲解直方图均衡化的原理和应用,以增强图像的对比度和细节。
灰度变换的应用
探讨灰度变换在图像增强、图像分割和特征提取等方面的应用,以及潜在的 挑战。
线性滤波
介绍线性滤波的基本原理和常用滤波器,如平滑滤波器、锐化滤波器等。
数字图像处理课件冈萨雷 斯第三版
数字图像处理课件冈萨雷斯第三版PPT大纲:
数字图像基础知识
介绍数字图像的基本概念和背景,包括像素、色彩空间、图像分辨率等。
采样和量化
解释图像采样和量化的概念和方法,探讨图像质量和文件大小之间的平衡。
像素与分辨率
讨论像素和分辨率的关系,以及它们对图像质量和打印输出的影响。
非线性滤波
讲解非线性滤波的概念和应用,如中值滤波、自适应滤波等,以处理图像中 的噪声和模糊。
图像增强
探索图像增强的技术和方法,如直方图匹配、空域增强等,以提高图像的质 量和可视化效果。
边缘检测
讨论边缘检测的原理和常用算法,如Sobel算子、Canny边缘检测等。
霍夫变换
介绍霍夫变换的概念和应用,如直线检测、圆检测等,以在图像中检测特定的形状。
数字图像处理冈萨雷斯

数字图像处理冈萨雷斯引言数字图像处理是指对数字图像进行各种操作和处理的技术和方法的总称。
冈萨雷斯是指冈萨雷斯的数字图像处理体系结构,该体系结构包含了图像增强、图像滤波、图像变换等多个模块,可以对数字图像进行全方位的处理和分析。
本文将详细介绍数字图像处理冈萨雷斯的核心方法和技术。
图像增强图像增强是数字图像处理中的重要环节,旨在提高图像的质量和观感。
冈萨雷斯提供了多种图像增强方法,包括直方图均衡化、灰度变换、空域滤波等。
直方图均衡化直方图均衡化是一种通过重新分配图像像素值来增强图像对比度的方法。
它可以增强图像的细节和边缘,并提高图像的视觉效果。
冈萨雷斯提供了直方图均衡化的算法和实现,用户可以通过简单的调用来对图像进行直方图均衡化处理。
灰度变换灰度变换是一种通过对图像的灰度级进行调整来改变图像对比度和亮度的方法。
冈萨雷斯提供了多种灰度变换函数,包括线性变换、非线性变换等。
用户可以根据自己的需求选择适合的灰度变换函数,并通过简单的调用来实现图像的灰度变换。
空域滤波空域滤波是一种通过对图像进行局部像素操作来增强图像的方法。
冈萨雷斯提供了多种空域滤波算法,包括均值滤波、中值滤波、高斯滤波等。
用户可以根据图像的特点选择适合的滤波算法,并通过简单的调用来实现图像的空域滤波。
图像滤波图像滤波是指对数字图像进行平滑或增强处理的方法。
冈萨雷斯提供了多种图像滤波算法,包括线性滤波和非线性滤波。
线性滤波线性滤波是一种通过对图像进行卷积运算来实现的滤波方法。
冈萨雷斯提供了多种线性滤波算法,包括均值滤波、拉普拉斯滤波、Sobel滤波等。
用户可以根据图像的特点选择适合的线性滤波算法,并通过简单的调用来实现图像的线性滤波。
非线性滤波非线性滤波是一种通过对图像进行非线性操作来实现的滤波方法。
冈萨雷斯提供了多种非线性滤波算法,包括中值滤波、最大值滤波、最小值滤波等。
用户可以根据图像的特点选择适合的非线性滤波算法,并通过简单的调用来实现图像的非线性滤波。
冈萨雷斯数字图像处理中文版课件_第二章教程
11
2、灰度变换法
照片或电子方法得到的图像,常表现出低对比 度即整个图像偏亮或偏暗,为此需要对图像中 的每一像素的灰度级进行灰度变换,扩大图像 灰度范围,以达到改善图像质量的目的。
这一灰度调整过程可用imadjust( )函数实现。
2017/12/29
12
3、平滑滤波
平滑技术用于平滑图像中的噪声,基本采用在 空间域上的求平均值或中值。或在频域上采取 低通滤波,因在灰度连续变化的图像中,我们 通常认为与相邻像素灰度相差很大的突变点为 噪声点,灰度突变代表了一种高频分量,低通 滤波则可以削弱图像的高频成分,平滑了图像 信号,但也可能使图像目标区域的边界变得模 糊。
2017/12/29
8
四、图像增强功能
图像增强是数字图像处理过程中常用的 一种方法,目的是采用一系列技术去改 善图像的视觉效果或将图像转换成一种 更适合于人眼观察和机器自动分析的形 式。
2017/12/29
9
图像增强方法
灰度直方图均衡化。
灰度变换法。 平滑与锐化滤波。
2017/12/29
10
2017/12/29 26
3、灰度图像平滑与锐化处理(cont.)
“board_new.bmp”的 灰度化图像(原图)
2017/12/29
采用自适应滤波平滑
利用拉氏算子卷积锐化
27
一、图像直方图 灰度直方图描述了一副图像的灰度级统计信息,主要应用于图像分 割和图像灰度变换等处理过程中。从数学角度来说,图像直方图描述图 像各个灰度级的统计特性,它是图像灰度值的函数,统计一幅图像中各 个灰度级出现的次数或概率。归一化直方图可以直接反映不同灰度级出 现的比率。横坐标为图像中各个像素点的灰度级别,纵坐标表示具有各 个灰度级别的像素在图像中出现的次数或概率。 图像直方图归一化
数字图像处理_第三版_知识总结及习题解答(冈萨雷斯版)
把图像看作是平面中各个像素组成的集合,然后直接对这一二维函数进行相应的处理。主要有两大类: · 域处理法:包括梯度运算,拉普拉斯算子运算,平滑算子运算和卷积运算。 · 点处理法:包括灰度处理,面积、周长、体积、重心运算等等。 2.变换域法 数字图像处理的变换域处理方法是首先对图像进行正交变换,然后在施行各种处理,处理后再反变换到空 间域,得到处理结果。 包括滤波、数据压缩、特征提取等处理。 1.5 数字图像处理的主要内容 完整的数字图像处理系统大体上可分为如下几个方面: 1.图像的信息的获取(Image information acquisition) 把一幅图像转换成适合输入计算机和数字设备的数字信号。需要两个部件以获取数字图像: (1)物理设备,该设备对我们希望成像的物体发射的能量很敏感。 (2)数字化器,是一种把物理感知装置的输出转化为数字形式的设备。 常见的图像输入设备有:扫描仪、摄像机、数码相机、图像采集卡等 2.图像信息的存储(Image information storage) 主要有三类: (1)处理过程中使用的快速存储器; ·计算机内存。 ·帧缓存,通常可存储多幅图像并可以视频速度读取。它可以允许对图像进行放大、缩小,以及垂直翻转 和水平翻转。 (2)用于比较快的重新调用的在线或联机存储器; ·磁盘,可存储几个 G byte 的数据; ·磁光存储器,可在 51/4 英寸的光片上存储上 G byte 的数据; ·光盘塔,一个光盘塔可放几十个到几百个光盘,利用机械装置插入或从光盘驱动器中抽取光盘。 (3)不经常使用的数据库(档案库)存储器。 ·磁带。长 13 英尺的磁带可存储近 1G byte 的数据,但储藏寿命较短。 · 一次写多次读 (WORM) 光盘。 可在 12 英寸的光盘上存储 6G byte 数据, 在 14 英寸的光盘上存储 10G byte 数据,并易于储藏。 3.图像信息的传送(Image information transmission) 可分为系统内部传送与远距离传送: (1)内部传送: 指在不同设备间交换图像数据。现在有许多用于局域通信的软件和硬件以及各种标准协议。多采用 DMA(Direct Memory Access)技术以解决速度问题。 (2)外部远距离传送: 主要问题是图像数据量大而传输通道比较窄。 这一状况由于光纤和其他宽带技术的发展,正在迅速得到改进。另一方面,解决这个问题需要依靠对图像 数据压缩。 4.图像的输出与显示 图像处理的最终目的是为人或机器提供一幅更便于解释和识别的图像。因此图像的输出也是图像处理的重 要内容之一。 主要分两类: (1)硬拷贝(记录图像) 。如激光打印机、胶片照相机、热敏装置、喷墨装置和数字单元(如 CD-ROM)等。 (2)软拷贝。如 CRT (Cathode Ray Tube)显示、液晶显示器(LCD) 、场致发光显示(FED) 。 5.数字图像处理(Digital image processin波特率度量,其定义为每秒中传输的比特数。通常的传输是以一 个开始比特、一个字节(8 比特)的信息和一个停止比特组成的包完成的。基于这个概念回 答下列问题: (a)用 56K 波特的调制解调器传输一幅 1024×1024、256 级灰度的图像要花费几分钟? (b) 以750K 波特 [是典型的电话 DSL (数字用户线) 连接的速度] 传输要用多少时间? 解:(a)传输数据包(包括起始比特和终止比特)为:N=n+m=10bits 对于一幅1024×1024 大小的图像,其总的数据量为M=(1024)2×N, 故以56K 波特的速率传输所需时间为T=M/56000=(1024)2×(8+2)/56000=187.25s=3.1min (b) 以750K 波特的速率传输所需时间为T=M/56000=(1024)2×(8+2)/750000=14s (类似题目) 在串行通信中,常用波特率描述传输的速率,它被定义为每秒传输的数据 比特数。串行通信中,数据传输的单位是帧,也称字符。假如一帧数据由一个起始比特位、 8 个信息比特位和一个结束比特位构成。根据以上概念,请问: (1)如果要利用一个波特率为56kbps(1k=1000)的信道来传输一幅大小为1024×1024、 256级灰度的数字图像需要多长时间? (2)如果是用波特率为750kbps 的信道来传输上述图像,所需时间又是多少? (3)如果要传输的图像是512×512的真彩色图像(颜色数目是32 bit),则分别在上面两 种信道下传输,各需要多长时间? 解答: (1)传输的比特数为1024×1024×8×(1+8+1)/8=10485760,则在波特率为56kbps 的信道 上传输时,所需时间为10485760/56000=187.25 秒。
数字图像处理第二章(刚萨雷斯第三版)wzq-2
答: 存储一幅大小为M×N,有2k个不同灰度级的图像所用
的Bit数为: b=M×N×k (2.4-4)
因此,存储一幅512×512 ,有256个灰度级(k=8)的图 像需要 512×512×8=2097152(Bit) 或 512×512=256K(Byte)
2019年4月8日3时49分
2.4.3 空间和灰度级分辨率
韦伯定理说明:人眼视觉系统对亮度的对比度敏感而非对 亮度本身敏感; 低照度,韦伯比高,亮度辨别能力差;高照度,韦伯比低, 亮度辨别能力强; 2019年4月8日3时49分
2.1.3 亮度适应和辨别
(3)人眼感觉亮度并不是简单的强度函数
韦伯-费赫涅尔定理:亮度感觉S与实际亮度B的对数成 线性关系。
S k ln B k0
2019年4月8日3时49分
v( x ', y ') ax ' by ' cx ' y ' d
(2.4.6)
2.4.4 图像内插 3、图像放大的效果比较 用最近领内插法和双线性内插法得到的放大图像。分别将 128×128,64×64, 32×32放大到1024×1024
图 2019年4月8日3时 492.7 分
2.1.3 亮度适应和辨别 第二个现象称为同时对比现象,即,感觉的亮度区域不是 简单地取决于强度。
图2.8 同时对比例子,所有的中心方块都有相同的 强度,但是当背景变亮时,他们逐渐变暗
2019年4月8日3时49分
2.1.3 亮度适应和辨别 (4)视觉错觉 视觉错觉:人类感知 现象的另外一个例子 就是视觉错觉。在错 觉中,眼睛填充上了 不存在的信息或者错 误地感知物体的几何 特点。
2019年4月8日3时49分
数字图像处理 第三版 (冈萨雷斯,自己整理的2)
1. 数字数据传输通常用波特率度量,其定义为每秒钟传输的比特数。
通常的传输是以一个开始比特,一个字节(8 比特)的信息和一个停止比特组成的包完成的。
基于这个概念回答以下问题:(a) 用56K 波特的调制解调器传输一幅1024×1024、256 级灰度的图像需要用几分钟?(b) 以750K 波特[这是典型的电话DSL(数字用户线)连接的速度]传输要用多少时间?解:(a)T=M/56000=(1024×1024)×(8+2)/56000=187.25s=3.1min(b) T=M/56000=(1024×1024)×(8+2)/750000=14s2.两个图像子集S1和S2图下图所示。
对于V={1},确定这两个子集是(a)4-邻接,(b)8-邻接,(c)m-邻接。
a) S1 和S2 不是4 连接,因为q 不在N4(p)集中。
(b) S1 和S2 是8 连接,因为q 在N8(p)集中。
(c) S1 和S2 是m 连接,因为q 在集合N D(p)中,且N4(p)∩ N4(q)没有V 值的像素3. 考虑如下所示的图像分割(a) 令V={0,1}并计算p 和q 间的4,8,m 通路的最短长度。
如果在这两点间不存在特殊通路,试解释原因。
(b) 对于V={1,2}重复上题。
解:(a) 当V={0,1}时,p 和q 之间不存在4 邻接路径,因为不同时存在从p 到q 像素的4 毗邻像素和具备V 的值,如图(a)p 不能到达q。
8 邻接最短路径如图(b),最短长度为4。
m邻接路径如图(b)虚线箭头所示,最短长度为5。
这两种最短长度路径在此例中均具有唯一性。
(b) 当V={1, 2}时,最短的4 邻接通路的一种情况如图(c)所示,其长度为6,另一种情况,其长度也为6;8 邻接通路的一种情况如图(d)实线箭头所示,其最短长度为4;m 邻接通路的一种情况如图(d)虚线箭头所示,其最短长度为6.或解: (1) 在V={0,1}时,p和q之间通路的D4距离为∞,D8距离为4,Dm距离为5。
数字图像处理第三版中文答案解析冈萨雷斯
数字图像处理第三版中文答案解析引言《数字图像处理》是一本经典的图像处理教材,目前已经出版了第三版。
本文是对该书答案解析的总结,将分析和解释书中的问题和答案。
目录•第一章:绪论•第二章:数字图像基础•第三章:灰度变换•第四章:空间滤波•第五章:频域滤波•第六章:图像复原•第七章:几何校正•第八章:彩色图像处理•第九章:小波与多分辨率处理第一章:绪论本章主要介绍了数字图像处理的概念和基本步骤。
答案解析中包括对一些基本概念和术语的解释,以及相关的数学公式和图像处理方法的应用。
第二章:数字图像基础本章介绍了数字图像的表示和存储方法,以及图像的采样和量化过程。
答案解析中详细解释了图像的像素值和灰度级之间的关系,以及采样频率和量化步长对图像质量的影响。
第三章:灰度变换本章讲述了图像的灰度变换方法,包括线性和非线性变换。
答案解析中对不同灰度变换函数的作用和效果进行了解释,并给出了一些实例和应用。
第四章:空间滤波本章介绍了图像的空间滤波方法,包括平滑和锐化滤波。
答案解析中解释了不同滤波器的原理和效果,并给出了滤波器设计的步骤和实例。
第五章:频域滤波本章讲述了图像的频域滤波方法,包括傅里叶变换和滤波器设计。
答案解析中详细解释了傅里叶变换的原理和应用,以及频域滤波器的设计方法和实例。
第六章:图像复原本章介绍了图像的复原方法,包括退化模型和复原滤波。
答案解析中详细解释了退化模型的建立和复原滤波器的设计方法,以及如何根据退化模型进行图像复原的实例。
第七章:几何校正本章讲述了图像的几何校正方法,包括图像的旋转、缩放和平移等操作。
答案解析中给出了不同几何变换的矩阵表示和变换规则,以及几何校正的应用实例。
第八章:彩色图像处理本章介绍了彩色图像的表示和处理方法,包括RGB和HSV 等颜色模型的转换和处理。
答案解析中详细解释了不同颜色模型的表示和转换方法,以及彩色图像处理的实例和应用。
第九章:小波与多分辨率处理本章讲述了小波和多分辨率处理的方法和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
思考: 1、为什么图像经常用512×512、256×256、128×128 等形式表述; 答: 因为当图像的大小是2的次幂时,图像的许多计算 可以得到简化。 2、存储一幅512×512,有256个灰度级的图像需要多 少比特?
答: 存储一幅大小为M×N,有2k个不同灰度级的图像所用的Bit数 为: b=M×N×k (2.4-4)
(2)辨别光强度变化的能力
2.1.3亮度适应和鉴别
当背景光保持恒定时,改变其他光源亮度,从不能察觉到可以察觉 间变化,一般观察者可以辨别12到24级不同强度的变化. 图2.5 亮度辨 别特性的基本 实验
韦伯定理说明: 人眼视觉系统对亮度的对比度敏 感而非对亮度本身敏感; 图2.6 作为强 度函数 的典型 韦伯比
在错觉中,眼睛 填上了不存在的 信息或错误地感 知物体的几何特 点。
2.2 光和电磁波谱
电磁波谱可以用波长( )、频率( )或能量( E ) 来描述
c v (2.2 1)
E hv (2.2 2)
h--普朗克常量
c--光速
光 —— 可以被人眼感知的电磁波。
2.2 光和电磁波谱
背景变亮,相同强度的方块变暗。
2.1.3亮度适应和鉴别
马赫带效应
感觉亮度不是简单的
强度函数的;视觉系 统有趋于过高或过低 估计不同亮度区域边 界值的效应。 图中各色带亮度恒定, 但实际感觉条带边缘亮 度有变化:边缘处,亮 的一边更亮,暗的一边 更暗;
2.1.3亮度适应和鉴别
(4)视觉错觉(Optical Illusions)
1、两个像素p和q邻接的条件 (1)位置相邻 p(m,n)和q(s,t)位置上满足相邻,即
(2)灰度值相近,即称为灰度值相近(似)准则。 称为灰度值相近(似)准则。
2、邻接性
2.5 像素间的一些基本关系
令V是用于定义邻接性的灰度值集合(相似性准则),存 在三种类型的邻接性:
(1)4邻接:若像素p和q的灰度值均属于V中的元素,且q在 N4(p)中,则p和q是4邻接的.
( x, y)
( x , y )
( x, y)
双线性内插方法
v( x ', y ') ax ' by ' cx ' y ' d (2.4.6)
2.4.5 (2)图像放大的效果比较(例2.4)
图像的收缩与放大
用最近领域内插法(上一行)和双线性内插法(下一行)得到的放大图像 分别将128×128,64×64, 32×32放大到1024×1024
在原理上,如果可以开发出一种传感器,能够检测由 一种电磁波谱发射的能量,就可以在那一段波长上对 感兴趣的物体成像。
2.2 光和电磁波谱
灰度和色彩:
彩色模型: RGB 加色法 CMY,CMYK 减色法 HSB(色泽,饱和度,明亮度)
2.2 光和电磁波谱
彩色光源的三个基本属性:
①发光强度——从光源流出的能量的总量。单位:瓦特(W) ②光通量——观察者从光源感受到的能量。单位:流明(lm)
韦伯-费赫涅尔定理:亮度感觉S与实际亮度B的对数 成线性关系。 S k ln B k0 因此, 重现景物的亮度范围无需与实际景物的亮度范围相 同,只需保持二者的对比度相同; 人眼不能辨别的亮度差别也无需重现出来,只需保 持二者的亮度差别级数相同即可;
2.1.3亮度适应和鉴别
同时对比效应(Simultaneous Contrast) 即人眼对某个区域感觉的亮度(主观亮度)不 仅依赖于他自身的亮度,还与它的背景有关;
因此,存储一幅512×512 ,有256个灰度级(k=8)的图像需要 512×512×8=2097152(Bit) 或 512×512=256K(Byte)
2.4.3 空间和灰度分辨率
空间分辨率(spatial resolution)
图像中可分辨的最小细节,主要由采样间隔值决定
采样间隔值越小,空间分辨率越高
2.4 图像取样和量化
获取图像的目标是从感知的数据中产生数字图 像,但是传感器的输出是连续的电压波形,因此需 要把连续的感知数据转换为数字形式。
这一过程由图像的取样与量化来完成。
数字化坐标值称为取样
数字化幅度值称为量化。
图像的取样率:单位距离的取样数目(在两个空间方 向上)
2.4
图像取样和量化
2.4
(1)视觉适应性
亮度适应范围:1010量级(10-6mL(夜视域)~104mL(强闪光));
与整个适应范围相比,人眼在某一时刻能鉴别的亮度级别范围很 小(以该环境的平均亮度为中心的一个小的亮度范围); 亮度适应级(视觉系统当前的灵敏度级别): 人眼适应了某一环境后,该环境的平均亮度; 亮度适应现象:人眼并不能同时在整个范围内 工作,而是利用改变灵敏度来实现大的动态范围 内的变动; 当平均亮度适中时,能分辨的最大亮度和最小 亮度之比为1000:1;当平均亮度很低时,这个比 值只有10:1 主观亮度是进入人眼的光强度的对数函数;
a)20 km/pixel; b)10 km/pixel
空间分辨率
1 pixel km (低) 20
空间分辨率
1 pixel km (高) 10
灰度级L不变
空间分辨率变化对图像视觉效果的影响
(a)原始图像(256×256) (b)采样图像(128×128) (c)采样图像(64×64)
(d)采样图像(32×32)
M,N必须为正数,L为灰度级,灰度的取值范围为[0,L-1]。 灰度级的取值范围一般称为图像的动态范围。 一般,M、N和L取值为2的整数次幂。 L=2k,称为k位图像
2.4.2.数字图象的表示
(3)像素坐标系(显示)
1、坐标原点位于左上角
2、数据先沿x轴增加
3、然后再沿y轴增加
4、坐标轴为整数
2.4.2.数字图象的表示
函数,按总的量化误差最小的原则来进行量化.具体做法是对
图像中像素灰度值频繁出现的灰度值范围,量化间隔取小一些, 而对那些像素灰度值极少出现的范围,则量化间隔取大一些.
由于图像灰度值的概率分布函数因图像不同而异,所以不可能
找到可用于所有图像的最佳非等间隔量化方法.
2.4.2.数字图象的表示
f (0,1) f (0, N 1) f (0,0) f (1,0) f (1,1) f (1, N 1) f ( x, y ) f ( M 1,0) f ( M 1,1) f ( M 1, N 1) 这个表达式的右侧定义 了一幅数字图像。矩阵 中的每个 元素称为图像像素。
(2)8邻接:若像素p和q的灰度值均属于V中的元素,且q在 N8(p)集中,则p和q是8邻接的. (3)m邻接(混合邻接):若像素p和q的灰度值均属于V中的 元素,{①q在N4(p)中,或者②q在ND(p)中}且{集合 N4(p)∩N4(q)没有V值的像素},则具有V值的像素p和q 是m邻接的.
2.5 像素间的一些基本关系
主要内容
相邻像素
邻接性、连通性、区域和边界
距离度量
基于像素的图像操作
图像的代数运算性、连通性、区域和边界
2.5 像素间的一些基本关系
2.5.1 相邻像素
对于像素p(m,n)
4邻域 (m+1,n),(m-1,n),(m,n+1),(m,n-1) N4(p)
对角邻域 (m+1,n+1),(m+1,n-1),(m-1,n+1),(m-1,n-1) ND(p)
8邻域
N4(p) + ND(p)
N8(p)
4邻域
对角邻域
8邻域
2.5 像素间的一些基本关系
2.5.2 邻接性、连通性、区域和边界
像素的相邻仅说明了两个像素在位置上的关系,若 再加上取值相同或相近,则称两个像素邻接。
灰 度 图 像
彩 色 图 像
2.4
图像取样和量化
黑白图像的数字化
2.4
图像取样和量化
灰度图像的数字化
2.4
图像取样和量化
彩色图像的数字化
2.4
图像取样和量化
图像的非均匀采样:
在灰度级变化尖锐的区域,用细腻的采样,在灰度级比较
平滑的区域,用粗糙的采样。
图像的非均匀量化:
非均匀量化是依据一幅图像具体的灰度值分布的概率密度
图像取样和量化
2.4
图像取样和量化
模拟图像信号
0 I f ( x, y) A 0 I (i, j ) A
(1)空间采样
(2)灰度级(强度)量化
I [0, Lmax ]
坐标的数字化称为采样,幅度值的数字化称为量化。
1.均匀采样和量化
2.非均匀采样和量化
2.4
图像取样和量化
黑 白 图 像
成。
我们感兴趣的各类图像都是由“照射”源和形成图像 图像系统的线性模型 的“场景”元素对光能的反射或吸收相结合而产生的。
2.3.4 简单的图像成像模型
入射分量
反射分量
f ( x, y ) i ( x, y ) r ( x, y ) (2.3 2)
0<f(x,y)<∞ 0<i(x,y)<∞ 0<r(x,y)<1
掌握像素间的关系:相邻、领域、邻接性、 连通性、距离的度量 掌握图像的代数运算以及应用
2.1 视觉感知要素
2.1.1 人眼的构造(自学) 2.1.2 眼睛中图像的形成(自学) 2.1.3亮度适应和鉴别
人眼对不同亮度的适应和鉴别能力
亮 暗 适应慢 暗 亮 适应快
2.1.3亮度适应和鉴别
灰度(Intensity) 白光强度(illumination) 平均反射系数(reflectance)