西门子1000MW机组闭环控制简介
叶祺贤----国产1000MW机组协调控制系统介绍
(2)协调控制方式将自动切切至汽机跟随方式,并且锅炉主控的输出将以RB 速率跟踪最大目标负荷率,达到快速减少燃料量的目的。 (3)除磨煤机外,其它辅机设备发生RUNBACK时,将按从下往上的顺序,每 隔10秒停一台磨煤机,一次风机每隔5秒停一台磨煤机,最终维持三台磨煤机 运行。 (4)一次风机RUNBACK时,相应的调节回路将自动提升另一侧风机动叶,一 次风机上限为95%,磨煤机的上限为85%。 (5)RUNBACK发生后,氧量控制切手动,热值修正停止。 (6)增加送风RB时引风机OVERRIDE信号。 (7)RB发生时减温水比例作用增强,以迅速关闭减温水。 (8)当发生RB时跳磨会引起主汽温急剧下降这时切除煤量到给水的惯性环节。 (9)一、二次风和给水流量等调节系统也将根据燃料量的变化进行相应的调 整,以维持锅炉的主要运行参数。
曲线三
2.3升负荷100MW、速率1.5%/min(8号机组) 2008年5月17日00:11开始升负荷700MW到800MW试验,负荷速率设定在 1.5%/min,当时负荷700MW、主汽压力17.86Mpa、给水流量2287T/h、燃 料量68%,到00:20升负荷试验结束,此时负荷797MW、主汽压力 20.48Mpa、给水流量2099T/h、燃料量77%。具体见曲线四。
曲线六
3.3 FCB试验过程(8号机组) 定义在300MW以上发生发电机开关GCB跳闸或50万开关与50万7#8#机组联 络开关全跳闸为FCB。FCB由RB信号通道快速跳磨煤机,保留三台磨运行。 5月21日21:55进行了FCB试验,试验时机组负荷1011MW,MCS自动全部投 入,主汽压力26.4MPa、煤量101%、给水量2628t/h、主汽温594℃、分离 器出口温度448℃、除氧器水位491mm、除氧器压力1014Kpa、凝汽器水位 697mm、凝水流量1800t/h,手动跳50万开关与50万7#8#机组联络开关, 发FCB信号,旁路快开,跳B/C磨煤机,煤量快速到53%,汽机到转速控制 方式,汽机转速飞升最高3161rpm,最低2995rpm,在100s内稳定在 2999rpm,主汽压力最高28.4Mpa,给水量最低1343t/h,主汽温最低 573℃,凝水流量快速到3537 t/h,炉膛负压最低到-467Pa,分离器出口 温度最低371℃,机组带厂用电负荷35MW,待机组稳定后,主汽压力 14.7Mpa、给水量1381t/h、除氧器水位615mm、除氧器压力474Kpa,凝汽 器水位765mm,试验圆满成功,见曲线七、曲线八。
西门子超超临界1000 MW机组DEH甩负荷控制功能异常分析及处理

D E H系统采用西 门子公 司的 S P P A — T 3 0 0 0控制 系统 , 液压部分是采用高压抗燃油的电液伺服控制系 统 。由 S P P A— T 3 0 0 0与液 压系 统组 成 的数字 电液 控制 系统通过数字计算机 、 电液转换机构 、 高压抗燃油系 统和 油 动机控 制 汽轮 机 主汽 门 、 调 节 汽 门和补 汽 阀 的 开度 , 实 现对 汽 轮 发 电 机组 的转 速 与 负荷 实 时 控制 。 该 系统 满 足 了高可 靠 性 、 可扩 展 性 、 有冗 余 的 汽轮 机 转 速/ 负荷 控制 器 的需要 。 1 事件 经 过 2 0 1 2年 7月 7日 7时 1 7分 , 双泗 变 电站 5 0 0 k V 母线 B相接 地故 障 、 母 差保护 动作跳 闸 , 引起徐 州 电厂 5 0 0 k V系统 电压 、 电流瞬 间波动 , 持续时 间约 5 0 m s 。 # 1机 组 D E H 控 制 系统 响 应 过 程 : 7时 1 7分 9 秒, D E H控制 系统监测 到发 电机 功率从 6 4 4 M W 突 变为 3 0 0 MW, 后又恢 复至 6 5 8 MW, 触发 D E H调 门快 关 指令 , 高、 中压调 门迅 速关 到 0 , 负荷 降 至一 1 3 0 MW。 7时 1 7 分1 1 秒, 调 门快关信号消失 , 调门开启 , 汽轮 机 负荷 逐渐恢 复 , 7时 l 7 分4 0秒达 到 6 4 4 MW。 样 2机 组 D E H 控 制 系统 响 应 过 程 : 7时 1 7分 9 秒, 群 2发 电机功 率从 6 4 5 MW 突变 为 3 0 0 MW, 后又恢 复为 6 6 2 MW , 触发 D E H调 门快 关 指 令 , 高、 中压 调 门迅速关到 0 , 负荷降至一 1 7 0 M W。 7 时1 7 分1 1 秒触 发汽 轮机长甩负荷 指令 , D E H控制系统执行甩负荷 工 况 时切 至带 负荷 下 的转速 控制 运 行方 式 , 此 时负荷 为一 1 2 MW。 7时 1 7分 4 3秒 “ 发变 组第 一套 保 护逆功
1000MW汽轮机控制保护系统

转速/负荷控制器功能
• 改变负荷功能 • 负荷可以由运行人员手动设定,或由外部系统(协 调控制器或负荷分配器)自动设定,在上述情况中, 如果需要,设定值受 TSE 限制,为了改善动态稳定 性,负荷设定值的比例系数可调,并对负荷控制器 直接进行控制。 • 从负荷控制切换到转速控制 • 在带负荷运行时转速设定值自动切到正常转速,因 而当甩负荷时可精确地控制在此转速。 • 当机组脱网时,负荷设定值切除并自动转到转速控 制。 • 当机组带负荷时,也可以从负荷控制切除为转速控 制,此切换为无扰的。
汽轮机组自启动
汽轮机主控程序在汽轮机启动冲转及带 负荷工程中,监视汽轮机的状态,如蒸汽温 度、阀门及汽缸的金属温度,并判断是否满 足机组启动冲转的条件(X准则)。在启动 过程中在适当的时机向汽轮机辅助系统及其 它相关系统发出指令并从这些系统接受反馈 信号,使这些系统的状态与汽轮机启动的要 求适应。
• 试验
– 检查活动情况 – 安全功能试验 – 最大关闭时间
• 提供操作员启动及监视
自动阀门试验
联合汽门的阀门试验
阀位[%] 100
主汽门
汽 轮 机 调 门
10
0
4
5
6
7
8
9
10
11
51
52
53
冷再热逆止阀
85
100
高排通风阀
ATT [step]
冷再热逆止阀和高排通风阀试验
AS417 FM458
AS417
AS417
B
A
ET200 ET200 ADDFUM 自启动 ETS 阀门控制 转子应力
ET200 卡件柜
ET200
ET200 继电器柜 电源
西门子1000MW机组闭环控制简介.

1000MW机组闭环控制简介汤益琛一、机组协调控制协调控制的目的可以简单描述为:在维持机、炉能量平衡的前提下快速响应系统负荷需求。
我厂1000MW机组的协调控制方式是以锅炉跟随为基础的机炉协调控制方式,即我们常说的锅炉控压力,汽机控负荷,特点是负荷响应快,主汽压力欠稳。
变负荷时的响应优化图1 协调控制示意图1、负荷控制回路通过查看DCS和DEH控制画面中可以发现,机组负荷指令N与汽轮发电机组最终响应的负荷指令是有区别的,因为协调控制是一种智能控制,是会根据自身特点和能力来灵活响应系统负荷需求的。
锅炉具有大惯性、大迟延的调节特性,压力拉回回路是当锅炉对主汽压力调节不足时,让响应速度快的汽轮机参与稳定主汽压力。
即当主汽压力偏差较大时,汽机加负荷,开调门,抑制汽压上涨;反之,则减负荷、关调门。
五号机的压力拉回回路的压力偏差动作值范围为0.35~0.8 MPa,六号机为0.15~0.8 MPa。
该回路示意图如图2:图2 压力拉回回路一次调频优化主要是针对投AGC时,AGC指令与一次调频方向不一致,引起调频效果差而设计。
简单说,就是当一次调频响应幅值>0.1MW时,暂停AGC指令响应,并增加1.5MW的一次调频效果。
信号补偿是因为DEH的负荷指令是通过硬接线从DCS模拟量输出的,存在信号衰减。
为了还原失真的信号,此处将DEH收到的信号通过跨服务器AP间通讯传回DCS,进行差额补偿。
2、锅炉主控指令主要由以下几部分组成:(1)、基本指令:单元负荷指令和频率校正叠加作为B-MASTER的基本指令,是机组稳定运行时的锅炉负荷,即汽机发多少,锅炉就烧多少。
(2)变负荷/压力速率:锅炉惯性、迟延大,加负荷若只靠基本指令作用,则变负荷、压力速度过慢,所以为了达到要求的变负荷/压力速率要求,必需增加额外的锅炉负荷。
这与汽车提速的道理类似,起步时加大油门实现快速提速,等接近目标速度时逐渐减小油门,减小加速度。
负荷和压力设定值产生的动态补偿就是为了实现这一过程,等到稳态时其输出为0.(3)锅炉蓄热补偿:锅炉压力的改变会引起锅炉蓄热的变化,变负荷(包括一次调频)初期都是通过增、耗锅炉蓄热来实现快速响应的。
西门子PID控制原理总结
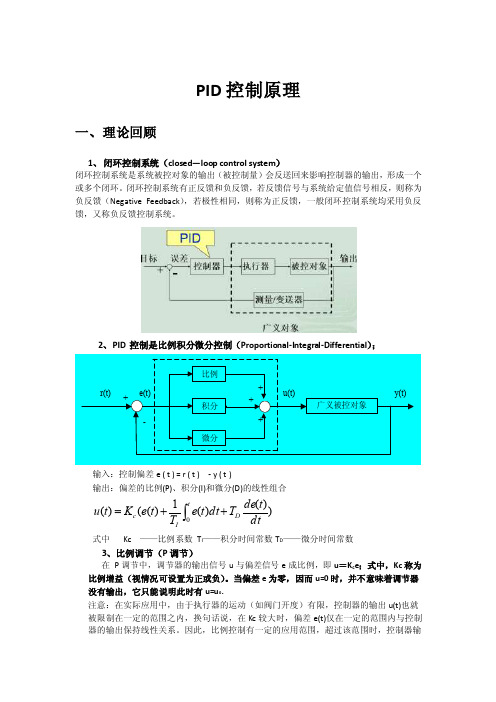
PID 控制原理一、 理论回顾1、 闭环控制系统(closed —loop control system )闭环控制系统是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
闭环控制系统有正反馈和负反馈,若反馈信号与系统给定值信号相反,则称为负反馈(Negative Feedback ),若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称负反馈控制系统。
2、PID 控制是比例积分微分控制(Proportional-Integral-Differential );输入:控制偏差e ( t ) = r ( t ) - y ( t )输出:偏差的比例(P)、积分(I)和微分(D)的线性组合式中 Kc ——比例系数 T I ——积分时间常数T D ——微分时间常数3、比例调节(P 调节)在 P 调节中,调节器的输出信号u 与偏差信号e 成比例,即u =K c e ;式中,Kc 称为比例增益(视情况可设置为正或负)。
当偏差e 为零,因而u=0时,并不意味着调节器没有输出,它只能说明此时有u=u 0.注意:在实际应用中,由于执行器的运动(如阀门开度)有限,控制器的输出u(t)也就被限制在一定的范围之内,换句话说,在Kc 较大时,偏差e(t)仅在一定的范围内与控制器的输出保持线性关系。
因此,比例控制有一定的应用范围,超过该范围时,控制器输))()(1)(()(0dt t de T dt t e T t e K t u D tIc ++=⎰出与输入之间不成比例关系。
3.1、比例控制的特点○1、P 调节对偏差信号能做出及时反应,没有丝毫的滞后。
○2、比例调节的显著特点就是有差调节。
如果采用比例调节,则在负荷扰动下的调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差。
因为根据比例调节的特点,只有调节器的输入有变化,即被调量和设定值之间有偏差,调节器的输出才会发生变化。
1000MW超超临界机组控制系统新技术的应用解析
1000MW超超临界机组 控制系统新技术的应用
姚 峻
华东电力试验研究院有限公司
外高桥三厂1000MW机组系统概况
超超临界, BMCR时,锅炉出口汽压27.9MPa,主汽温/再热汽 温605℃/603℃。
ALSTOM技术的塔式锅炉 + SIEMENS技术的单轴 四缸汽轮发电机。 100%高压旁路。
影响FCB成功是否的几条关键因素
保证工质平衡。关键是旁路需快开,必要时 包括中压安全门打开,且能保证凝汽器入口 不超温。 保证能量平衡。关键是锅炉在大幅快减负荷 后,燃烧稳定,煤/水比不明显失调。 汽机能维持住3000RMP,不超速,转速控制 动作精确。 小汽机汽源切换要成功,否则再发生汽泵跳 闸就比较困难了。
新型协调控制系统的设计与实施
外高桥三厂1000MW机组运行中汽机调门始终全开, 纯滑压运行的机组,无节流损失,经济性最优,但负 荷调节响应最差。 为了满足电网AGC变负荷的速率要求,外高桥三厂采 用了基于凝结水节流 的新型节能型的协调控制系统, 该技术在国内属于首次应用 ,并已在外三厂#7/#8机 组获得很大的成功。
(3) FCB工况下机组的控制
FCB功能是完全依赖于机组的控制系统而实现的。FCB工 况是发电机组最大的工况扰动,是对整个机组所有的保护、 调节和程控系统的综合检验。 FCB试验前,仔细梳理保护、调节和程控回路 。 “细节决定成败”,控制系统中的一些小细节往往决定了 FCB的成功是否。比如防止主要辅机出现跳闸或不正常动作, 比如防止信号坏质量或偏差大引起回路切手动,等等。 FCB主控制回路 DEH的主要任务是维持汽机3000rpm运行;DCS的协调控 制回路按RB控制方式执行,快速减负荷至50-55%左右;高 旁接受快开指令,几秒后转入与锅炉燃烧率相关的压力控 制。
超超临界及西门子核电1000MW介绍

超超临界及核电百万千瓦汽轮机技术介绍
高效洁净燃煤电厂的设计理念
热效率提高值
烟气余热回收 循环优化 0.9% 1.1% 回收60-80-MWe 给水温度提高58°等
超超临界参数
优化汽轮机 超低背压 减少辅助耗功
1.3%
1.7% 1.4% 1.3%
压力提高10MPa,温度提高 50°C
3D叶片等 5kPa到2.89/3.55kPa 厂用电6.3%下降到4.6%
超超临界及核电百万千瓦汽轮机技术介绍
超超临界及核电 百万千瓦汽轮机技术介绍
上海汽轮机有限公司
超超临界及核电百万千瓦汽轮机技术介绍
介绍内容
我国发展超超临界汽轮机的背景
唯一同时实现三大技术突破的“HMN”机型 独特的结构、独特的技术、独特的性能优势
STC-西门子超超临界1000MW汽轮机合作状况
* *
80-90年美国大规模的改造和优化,解决可靠性问题
参数回到超临界(温度小于566度,压力25MPa以下)
上海汽轮机有限公司
超超临界及核电百万千瓦汽轮机技术介绍
(2)世界超临界第二次大规模发展-1993年后德国及日本
新一轮超临界技术发展的动力
▲ 燃料资源结构:煤远超过气、油 ▲ 欧美环保政策、德国洁净燃煤及关闭核电能源政策 ▲ 京都议定书;减少CO2排放的经济杠杆 ▲ 目前唯一达到产业化要求的高效洁净燃煤技术
上海汽轮机有限公司
超超临界及核电百万千瓦汽轮机技术介绍
唯一同时实现超超临界三大技术突破的机型
欧洲电厂超超临界业绩(西门子为主)
电厂 KW SCHWARZE PUMPE 1 GERMANY(KWU) GERMANY(KWU) MW 874 874 415 414 910 933 933 600 1025 750 980 980 1000 1000 投运 1997 1997 1998 1998 1999 1999 1999 2002 2002 2002 2003 2004 2007 2007 压力 25.2 25.2 29 28.5 25.8 26. 26. 25.1 26.5 25 25 25 26.25 27.0 温度 542/562 542/562 582/580/580 580/580/580 541/578 550/5582 550/5582 600/610 576/600 575/595 538/566 538/566 600/600 600/600
1000MW超超临界机组热应力控制
1000MW 超超临界西门子汽轮机真正实现了汽轮机的自动启动(ATC ),其中难点就是对汽轮机热应力的监视和控制,这是确保汽轮机安全运行的根本。
依靠其本身设计的应力监视系统、温度准则系统,蒸汽参数与汽机各部件金属温度配合良好,使汽机快速启动又保证汽轮机的安全使用。
从暖阀、挂闸、冲转、暖机、升速至3000r /min 全过程自动。
机组并网后,控制机组负荷速率依然是以应力计算出的裕度为基准。
1热应力准则介绍及转子温度计算热应力监视系统的主要就是对汽机的高主门、调阀、高、中压转子和高压缸体等部件的温差进行监视,使蒸汽温度与金属温度匹配,减小热应力对金属部件的冲击,以免金属疲劳。
1.1X2准则在冷态冲转阶段,蒸汽凝结放热时的换热量极大,为避免高调门的冲击,X2准则根据主调门阀体温度确定了饱和温度的上限。
确保主汽压对应饱和温度小于高调阀温度。
X2=主汽压饱和温度-(高调50%处壁温+1.3×高调50%处壁温对应的f (x )函数)。
在启机顺控第13步检查蒸汽参数中需要满足确认,主要是准备开主汽门,对高压阀体进行暖阀。
1.2X4、X5、X6准则X4准则要求主汽温度不能过低。
确保主汽压对应饱和温度小于主汽温度。
X4=主汽温-主汽压饱和温度对应的f (x )函数。
在启机顺控第20步需要确认,主要是为了防止开调门后,饱和温度过低,防止湿蒸汽进入汽轮机。
X5准则确保进入避汽轮机高压缸部分温度不低,确保主汽温高于高压缸的壁温和高压转子的温度。
X5=主汽温-(高压转子表面温度和高压缸50%处壁温)取大后的f (x )函数。
在启机顺控第20步需要确认,防止开调门后高压缸冷却。
X6准则要求再热汽温不能过低。
确保再热汽温高于中压转子温度。
X6=再热汽温-中压转子表面温度的f (x )函数。
在启机顺控第20步需要确认,防止开调门后中压缸冷却。
1.3X7A 、X7B 准则X7A 准则保证高压汽轮机转子的暖机度,目的是使高压汽轮机充分暖机,一旦满足表示高压缸暖机完成。
1000MW超超临界机组控制介绍
目录目录一、国际上超临界机组的现状及发展方向二、国内500MW及以上超临界直流炉机组投运情况三、超临界直流炉的控制特点四、1000MW超(超)临界机组启动过程五、1000MW超(超)临界机组的控制方案一、国际上超临界机组的现状及发展方向我国一次能源以煤炭为主,火力发电占总发电量的75%全国平均煤耗为394g/(kWh),较发达国家高60~80g,年均多耗煤6000万吨,不仅浪费能源,而且造成了严重的环境污染,烟尘,SOx,NOx,CO2的排放量大大增加火电机组随着蒸汽参数的提高,效率相应地提高¾亚临界机组(17MPa,538/538℃),净效率约为37~38%,煤耗330~340g¾超临界机组(24MPa,538/538℃),净效率约为40~41%,煤耗310~320g¾超超临界机组(30MPa,566/566℃),净效率约为44~45%,煤耗290~300g(外三第一台机组2008.3.26投产,运行煤耗270g)由于效率提高,污染物排量也相应减少,经济效益十分明显。
一、国际上超临界机组的现状及发展方向1957年美国投运第一台超临界试验机组,截止1986年共166 台超临界机组投运,其中800MW以上的有107台,包括9台1300MW。
1963年原苏联投运第一台超临界300MW机组,截止1985年共187台超临界机组投运,包括500MW,800MW,1200MW。
1967年日本从美国引进第一台超临界600MW机组,截止1984年共73台超临界机组投运,其中31台600MW, 9台700MW,5台1000MW,在新增机组中超临界占80%。
一、国际上超临界机组的现状及发展方向¾目前超临界机组的发展方向90年代,日本投运的超临界机组蒸汽温度逐步由538/566℃提高到538/593℃,566/593℃及600/600℃,蒸汽压力保持在24~25MPa,容量以1000MW为多,参数为31MPa,566/566℃的两台700MW燃气机组于1989年和1990年在川越电厂投产。
1000MW火电机组热控控制系统解析

1000MW火电机组热工控制系统2015年10月目录第一部分 DCS总体情况介绍 2—7 第二部分超超临界锅炉启动系统说明 8—14第三部分机、炉、电主保护梳理 15—17 第四部分协调及启动系统控制说明 18—25 第五部分汽轮机调节器DTC 26—62 第六部分 DEH自启动逻辑 63—84第一部分 DCS总体情况介绍本工程锅炉采用哈尔滨锅炉厂生产的超超临界参数变压运行直流炉、单炉膛、双切圆燃烧、一次再热、平衡通风、露天布置、固态排渣、全钢构架、全悬吊结构Π型布置。
锅炉出口蒸汽参数为27.56 MPa(a)/605/603℃。
汽轮机采用上海汽轮机厂生产的超超临界、一次中间再热、单轴、四缸四排汽、双背压、凝汽式、八级回热抽汽。
最大连续功率(TMCR)下参数:额定功率1060.157 MW;额定主汽门前压力 26.25MPa(a);额定主汽门前温度 600℃;额定再热汽阀前温度600℃。
发电机采用上海电机厂生产的THDF125/67发电机组,额定功率1000MW,最大连续输出功率1100MW,额定电压27kV,额定功率因数0.9(滞后),额定转速3000r/min,冷却方式为水氢氢DCS系统采用爱默生公司OVATION400控制系统,工作站操作系统采用win3.2.x,组态工具为DELELOPER STUDIO。
两台机组共设置三个网络,分别为#7机组、#8机组、公用网络,网络之间信号交互采用硬接线。
单元机组共配置32对控制器(含2对MEH控制器),公用系统配备3对控制器。
控制器布置如下(每一系统项为一对控制器)DCS网络结构框架图如下:DCS系统总貌图如下:DCS电源原理示意图如下:MFT硬回路采用单回路设计,由DCS侧送三个常闭触点至跳闸表决回路和操作台硬按钮(双按钮串并联)并联后触发扩展继电器组动作。
MFT硬回路原理图如下:第二部分超超临界锅炉启动系统说明1.概述对于采用直流运行方式的超临界超超临界锅炉而言,水冷壁内的工质流量与锅炉负荷成正比变化,当锅炉负荷升高时、质量流速升高,当锅炉负荷降低时、质量流速也随之降低。
DEH功能介绍
操作,分别进行主汽门、调整汽门旳严密性试验。
试验功能
3 阀门活动试验 为确保发生事故时阀门能可靠关闭,DEH系统具有远方对高、
中压主汽门及高、中压调整汽门逐一进行在线试验旳功能。
一次调频
Primary Frequency Control
机组稳定运营后,DEH一般工作于开环旳运营方式下,由DCS完 毕功率回路闭环控制 ,由CCS直接输出阀位指令,DEH能够做到了开 环控制和闭环控制无扰切换,本地控制和远程控制旳无扰切换。DEH 能够根据电网要求,参加一次调频,且一次调频范围可调。系统旳 目旳负荷能够由运营人员设定或直接接受CCS系统来旳负荷指令。
主要调整参数有VP卡旳零和满旳参数值
阀位控制旳百分比带和积分时间系数
试验功能
1 超速试验 DEH中除了正常控制机组转速外,当转速无法维持时,还提供了
103%、110%超速保护控制。超速试验必须在3000RPM定速(转速不小 于2950RPM)、油开关未合闸旳情况下进行,它涉及OPC超速试验( 103%)、电气超速试验(110%)和机械超速试验。这三项试验在 逻辑上相互闭锁,即任何时候只有一项超速试验有效 。
负荷控制
并网后,DEH首先能够实现汽轮机自动带初始负荷,以预防逆 功率。DEH能够实现负荷旳开环和闭环两种控制方式。在开环控制时 ,在流程图中输入目旳功率值,然后由功率值换算成流量值,最终 经过阀门运营曲线换算成阀位开度。闭环控制时,DEH能够采用功率 控制回路和具有调整级压力回路旳功率控制。DEH计算出给定和实际 功率值旳偏差,根据PID控制器旳控制特征,调整系统旳功率值。因 为调整级压力反应较快,合用于要求负荷响应快旳场合。功率回路 反应较慢,但是能够实现功率旳精确调整。在功率回路中,为了提升 负荷对给定值变化旳响应速度,能够把给定值作为PID控制器旳前馈 。
1000MW机组锅炉闭环控制说明

1000MW机组锅炉闭环控制系统功能说明(锅炉本体)锅炉闭环控制系统功能说明(锅炉本体)目录页码1.0概述……………………………………………………………………………..空2.0控制回路的功能说明2.1机组协调控制 (1)⑴机组运行方式⑵机组主控⑶负荷增/减闭锁⑷汽机主控⑸锅炉主控⑹主汽压力控制⑺锅炉输入率需求⑻湿态与干态的切换⑼快速减负荷(RB)操作⑽交叉限制功能⑾协调控制回路的总体说明2.2给水控制⑴给水主控 (10)⑵锅炉给水泵流量控制…………………………………………………………(见注1)2.3水分离器控制 (11)⑴分离器的液位控制⑵锅炉再循环水量控制⑶WDC阀的控制⑷BCP热备用疏水排放调节阀⑸BCP喷水阀控制2.4汽机旁路控制……………………………………………………………(见注1)⑴概述⑵高压汽机旁路压力控制⑶高压汽机旁路温度控制⑷低压汽机旁路压力控制⑸低压汽机旁路温度控制2.5燃料控制⑴燃料量需求指令 (13)⑵水/燃料比控制 (13)⑶轻油控制 (14)⑷给煤机控制……………………………………………………………………(见注1)2.6磨煤机点火控制 (14)⑴一次风流量控制⑵磨煤机出口温度控制⑶磨煤机旋风分离器控制2.7风量和炉膛负压控制 (14)⑴风量控制⑵炉膛负压控制2.8一次风压控制 (15)2.9主蒸汽控制 (15)⑴一级过热器喷水控制⑵二级过热器喷水控制⑶三级过热器喷水控制2.10再热蒸汽温度控制 (16)⑴过热器/再热器旁通烟道出口烟气分配挡板控制⑵燃烧器摆动控制⑶再热器喷水控制2.11风箱挡板控制………………………………………………………………(见注2)注:1.详见图61110-1021-2《锅炉闭环控制系统功能说明(锅炉本体外)》2.详见图61120-1002《风箱挡板控制方法和控制要求》1.0概述空2.0控制回路的功能说明2.1 机组协调控制⑴机组运行方式机组协调控制就是用来根据机组运行工况形成一个下面所列的适合与锅炉和汽机要求的需求指令。
1000MW超超临界汽轮机控制系统(课题报告).
转速偏差的比例增益
X
转速设定 -
K4
转速控制器输出
实际转速 K
转速控制器原理
转速设定值和实际转速比较, 得到转速偏差。 转速偏差乘以一个比例增益后送到 PI 调节器的出口。 同时,又经过偏差比例 K4 送到 PI 调节器的入口,经 PI 运算后再相后得出转速控制器的输出指令,经 设定值形成模块后在送到阀位控制器, 通过电液转换器控制进汽阀的开度, 从而控制进入汽轮机的流量, 实行转速的闭环控制。 2.1.1.2 负荷控制 在汽轮机组并网后,机组控制即切换为负荷控制。 目标负荷一般通过协调控制系统给定,也可由运行人员通过操作员站给出。通过应力评估器 TSE 给 出的负荷增减变化率,将目标负荷转换为负荷设定值。负荷设定值和功率变送器测得的实际负荷比较, 得到负荷控制偏差。此偏差送到转速/负荷控制器的 PI 调节器,实现负荷的闭环控制。同时,引入有效 负荷设定值的前馈作用,可以消除电网引起的负荷波动,同时也可快速响应负荷设定值的变化。电网频 率对功率的影响直接作用在 PI 调节器入口,并且通过转速前馈增益作用于调节器的输出端,参与机组 的一次调频。 2.1.1.3 频率响应 运行人员可以通过操作员站对“频率响应”功能进行投入和切除。 频率影响只有在带有负荷控制器的负荷运行时才有效。 当从该模式切换到带有转速控制器负荷运行 或切换到带有初始压力控制器的运行,该影响会自动切除(如果先前投入) 。 如果电网频率太高,转速负控制偏差——降低机组的出力。 如果电网频率太低,转速正控制偏差——增加机组出力。 为在初始压力模式中,确保转速/负荷控制器和主蒸汽压力控制器断开,用初始压力模式的偏置值 调整有效负荷设定值。该值在限制压力模式中复置为零。 2.1.2 主蒸汽压力控制器 主蒸汽压力控制器实现两个不同的功能 在限压模式中,它用来防止主蒸汽压力实际值降到压力限制值水平之下。在初始压力控制模式中, 它控制主蒸汽压力。主蒸汽压力控制器有一个 PI 调节器。通过设定值形成模块的中央低选功能,它调 节汽轮机进汽流量直至另一控制器动作。 当主蒸汽压力控制器不动作时,控制器输出设置在中央低选功能加增加的主蒸汽压力控制偏差,以 将主蒸汽压力控制器从动作控制器中切除。
1000MW机组的协调控制
由于燃料、给水的动态响应特性不同,对给水适当地延缓, 对燃料增加动态解耦。
总风量指令=风煤比函数f2×氧量校正;燃料量指令=(锅炉主 控指令f4 +焓值调节的动态解耦)×热值校正;给水量指令=煤水比 函数f3(迟延)×焓值调节器的输出(或过热度调节器输出)。
在启动初期,采用APS系统启动机组时,带初负荷后升负 荷时,若旁路系统在调节主汽压力,则汽机跟踪方式下汽机并 不参与主汽压力调节,而是在当前的阀门开度基础上,随着负 荷指令的增加而慢慢开大,直到汽机旁路关闭后,才进入主汽 压力调节。
在发生RB工况时,也进入汽机跟踪方式,由汽机控制主汽 压力。
汽机跟踪方式(TF)控制示意图
1000MW机组的协调控制
2.2主要控制模式 (1)基本模式(BASE):锅炉主控手动控制,DEH处于本地限压控制方
式(转速或负荷控制)。 (2)汽轮机跟随模式(TF):锅炉主控手动控制, DEH处于初压控制方
式,通过调节汽轮机调门开度保证汽压。 (3)锅炉跟随模式(BF):锅炉主控自动控制汽压,DEH处于本地限压
减小
增大
减小
增大
微小变化 减小
微小变化 减小
增大
消除
减小
微小变化
PID控制器参数选择的次序:①比例系数;②积分系数;③ 微分系数。
1000MW机组的协调控制
一、超(超)临界直流炉机组的特点 1、给水的加热、蒸发和变成过热蒸汽是一次性连续完成的,汽水之
间没有一个明确的分界点,工质的流动,完全依靠给水泵产生的 压头。随着运行工况不同,锅炉将运行在亚临界、超临界压力下。 进入直流状态后, 当给水量、燃料量 和机组负荷等有扰 动时,蒸发点会自 发地在一个或多个 加热区段内移动。
西门子重型燃气轮机闭环控制策略

西门子重型燃气轮机闭环控制策略摘要:伴随着经济的发展和社会的进步,节能减排已经成为社会发展的根本要求,相关部门要对工业机械进行统筹性管理,积极建构绿色管理框架。
在西门子重型燃气轮机管理体系中,要对具体的控制过程予以重视,维护控制处理水平,实现最终的运行目标。
本文对西门子重型燃气轮机闭环控制内涵进行了简要分析,并集中讨论了控制措施,以供参考。
关键词:西门子重型燃气轮机;闭环控制;内涵;策略在节能减排的背景下,西门子重型燃气轮机的应用成为了社会热点,主要采取的是TELEPERM XP和T3000的控制系统,整体配备了414PG级别处理器,能在建立闭环控制逻辑的同时,维护相关数据的处理和存储问题,有效整合运维机制,为管理工作的优化奠定坚实基础。
一、西门子重型燃气轮机闭环控制内涵分析在西门子重型燃气轮机运行过程中,能实现启动过程、升速过程、并网过程以及负荷处理过程的自动化操作,且整体运行结构会利用闭环控制有效维护运行水平。
闭环控制项目中,会借助启动升速控制器、速度控制器、负荷控制器以及排气温度测定控制器等相关元件,有效维护压比限制参数以及负荷限制参数等,建立正规化控制器独立运算模式,并且能将运算出的数值直接输入到相关设备中,借助综合控制回路就能对最小控制值的输出过程和应用效果予以分析,最终有效调节预混阀处理和IGV阀门处理效果,真正提升整体设备的运维水平[1]。
二、西门子重型燃气轮机闭环控制策略分析在对西门子重型燃气轮机闭环控制工作予以分析的过程中,要积极建立健全统筹性较强的控制机制,维护策略的同时,保证相关问题得到有效解决,也为后续操作项目的整合和优化提供保障。
(一)整合升速控制器为了有效升级管理效果和处理水平,要积极落实更加实体化的机组启动命令,并且在激活升速器后,将西门子重型燃气轮机的盘车速率直接上升到额定空载转速位置,有效对燃气轮机进行处理,确保变频器和燃气轮机自身燃烧效果能得到满足,且能在相关设备共同作用下对转子升速水平予以控制,有效维护其实际运行趋势,确保其速率能达到2100r/min,整体压气机空气质量流量参数和和输出燃料流量参数能维持在一致的水平线上[2]。
1000MW机组深度滑停过程控制及分析

1000MW机组深度滑停过程控制及分析摘要:本文详细介绍了1000MW超超临界机组的一次深度滑停操作,总结出操作思路和特点,给出了注意事项,为今后同类型机组的深度滑停提供了参考。
关键词:超超临界;滑停;超低排放;烧空仓1.引言某厂#1、2锅炉型号为DG3060/27.46-π1型,为东方锅炉厂制造的超超临界参数直流炉,制粉系统为前后墙对冲布置,再热汽温采用烟气档板调节。
#1、2汽轮机型号为N1000-26.25/600/600型,为单轴四缸四排汽、冲动凝汽式汽轮机,旁路容量能满足机组安全启停及保证主汽温度和汽轮机金属温度相匹配的要求。
2.滑停概述为了使汽轮机停机后缸温和转子温度在短时间内降到较低的水平,缩短检修工期,通常有两种办法:一是运用压缩空气快冷技术,是在停机后的高温阶段,向汽轮机内输送300℃-350℃左右干燥洁净的空气,通过对压力、流量、温度的控制,按比例降低汽缸温度,达到快速冷却及防腐保养的目的;二是运用滑参数停机的方法,是在运行中用锅炉降温降压的方式来逐步冷却汽轮机本体,操作简便,也不需要额外配置冷却设备。
3.滑停目标滑停目标是满足机组安全停机检修的各项要求的同时多发电量、避免考核,尤其是在环保要求日益严格的大形势下,一定要杜绝环保指标的长时间超标。
3.1 机组滑停过程中降负荷率≯15MW/min,降温速度≯1℃/min,降压速度≯0.08-0.1MPa/min,主、再热汽温过热度>80℃。
300MW以下降负荷率≯10MW/min,降温速度≯0.8℃/min,主、再热汽温过热度≥50℃。
同时密切监视汽缸上下缸、内外壁金属温差,汽轮机胀差、轴向位移、推力瓦温、各轴承振动及轴瓦温度、回油温度在规程规定的范围内。
3.2 汽机打闸时控制内上壁缸温300℃,主汽压力滑至3.0MPa左右,锅炉主、再热蒸汽降至300℃左右,锅炉各煤仓烧空仓,各环保参数达超低排放要求。
3.3 在燃料、汽压控制方面尽量平稳,减温水调节要避免大增大减,尤其在低负荷阶段,防止汽温剧烈波动造成锅炉氧化皮脱落,同时防止汽轮机发生异常。
两种1000MW超超临界机组协调控制典型控分析PPT课件
.
4
一、超临界机组的流派
二、超临界机组的动态特性
三、煤水比控制的分类
四、ALSTOM 1000MW机组的协调控制
五、西门子直流炉全程给水控制
六、三菱1000MW机组的协调控制
七、BIR指令
八、三菱机组的煤水比(WTR)控制
九、投运效果
.
5
超临界机组的动态特性
热力 学 理 论认为,在22.115MPa,温度374.15℃时,水的汽化会在一 瞬间完成,即在临界点时饱和水和饱和蒸汽之间不再有汽、水共存 的两相区存在,两者的参数不再有区别。当水蒸汽参数大于上述临 界状态的压力和温度值时,则称其为超临界参数。
.
9
超临界机组的动态特性
① 汽机调门开度扰动
汽机调
门
汽机扰动对锅炉是一种负荷扰动,对超临界机组
开度
的影响具有典型的耦合特性:汽机调门开度变化
不仅影响了锅炉出口压力,还影响了汽水流程的
主汽
加热段,导致了温度的变化。
压力
● 主汽流量迅速增加,随着主汽压力的下降而逐
渐下降直至等于给水流量;
主汽
● 主汽压力迅速下降,随着主汽流量和给水流量
超超临界参数的概念实际为一种商业性的称谓,以表示发电机组具 有更高的压力和温度。我国将超超临界机组的研究范围设定在蒸汽 压力大于25MPa或蒸汽温度高于593℃的范围。 由于在临界参数下汽水密度相等,因此在临界压力下无法维持自然 循环,只能采用直流炉。超临界直流炉的汽水行程如下图所示。
.
6
加热段
蒸发段
过热段
给水
过热蒸汽
W
D
超临界直流炉汽水行程示意图
.
7
超临界机组可看作一个3输入/3输出并具有 很强耦合特性的被控对象.且工质内部具有很 强的多参量非线性特性。
1000MW机组西门子DEH系统逻辑优化

1000MW机组西门子DEH系统逻辑优化一、西门子系统简介上汽厂1000MW机组的DEH系统采用西门子公司的SPPA-TXP3000 控制系统,液压部分是采用高压抗燃油的电液伺服控制系统。
由SPPA-TXP3000与液压系统组成的数字电液控制系统通过数字计算机、电液转换机构、高压抗燃油系统和油动机控制汽轮机主汽门、调节汽门和补汽阀的开度,实现对汽轮发电机组的转速与负荷实时控制。
该系统满足了高可靠性、可扩展性、有冗余的汽轮机转速/负荷控制器的需要。
DEH控制系统为SPPA-TXP3000系统,DEH岛采用大DEH方案,即将属于DCS的汽机油系统、发电机的氢油水系统及部分与汽机安全有关的抽汽逆止门等并入DEH 岛,同时将MEH系统及与小机相关系统也并入DEH岛。
二、逻辑优化第一条甩负荷逻辑优化西门子超超临界机组DEH逻辑中甩负荷识别模件LAW是把甩负荷分为两个阶段,第一阶段是瞬时负荷中断KU(所谓的短甩负荷),机组的功率信号出现二种情况,即可认为机组发生瞬时负荷中断KU:1、瞬时降低的负荷量超过甩负荷识别极限值GPLSP(约为70%)728MW;2、机组出力较低,此时瞬时降低的负荷量可能不会超过GPLSP(728MW),但同时满足以下四个条件:A、发电机出口开关和主变高压侧开关闭合(正常运行时GLSE=1)B、实际负荷低于两倍厂用电负荷的限值GP2EB(104MW)C、实际负荷高于逆功率值GPNEG(-26MW)D、有效负荷设定值PSW-实际负荷PEL的差值大于两倍厂用电负荷的限值GP2EB瞬时负荷中断信号KU马上发出2秒后,机组负荷还是很低(发生KU的条件2依然满足),则发出甩负荷信号LAW。
KU和LAW都送至转速/负荷调节器NPR,另外LAW还送至转速设定模块。
西门子超超临界机组DEH逻辑中“带负荷下的转速控制运行方式”的逻辑即为带厂用电孤岛运行的典型设计。
若机组未设计带厂用电孤岛运行的方式,当“长甩负荷”信号LAW被触发后,汽轮机控制方式切换到“带负荷下的转速控制运行方式”,机组在此控制方式下且未与电网解列,只能维持3000转/分运行无法正常带负荷,易触发发电机逆功率保护动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1000MW机组闭环控制简介汤益琛一、机组协调控制协调控制的目的可以简单描述为:在维持机、炉能量平衡的前提下快速响应系统负荷需求。
我厂1000MW机组的协调控制方式是以锅炉跟随为基础的机炉协调控制方式,即我们常说的锅炉控压力,汽机控负荷,特点是负荷响应快,主汽压力欠稳。
变负荷时的响应优化图1 协调控制示意图1、负荷控制回路通过查看DCS和DEH控制画面中可以发现,机组负荷指令N与汽轮发电机组最终响应的负荷指令是有区别的,因为协调控制是一种智能控制,是会根据自身特点和能力来灵活响应系统负荷需求的。
锅炉具有大惯性、大迟延的调节特性,压力拉回回路是当锅炉对主汽压力调节不足时,让响应速度快的汽轮机参与稳定主汽压力。
即当主汽压力偏差较大时,汽机加负荷,开调门,抑制汽压上涨;反之,则减负荷、关调门。
五号机的压力拉回回路的压力偏差动作值范围为0.35~0.8 MPa,六号机为0.15~0.8 MPa。
该回路示意图如图2:图2 压力拉回回路一次调频优化主要是针对投AGC时,AGC指令与一次调频方向不一致,引起调频效果差而设计。
简单说,就是当一次调频响应幅值>0.1MW时,暂停AGC指令响应,并增加1.5MW的一次调频效果。
信号补偿是因为DEH的负荷指令是通过硬接线从DCS模拟量输出的,存在信号衰减。
为了还原失真的信号,此处将DEH收到的信号通过跨服务器AP间通讯传回DCS,进行差额补偿。
2、锅炉主控指令主要由以下几部分组成:(1)、基本指令:单元负荷指令和频率校正叠加作为B-MASTER的基本指令,是机组稳定运行时的锅炉负荷,即汽机发多少,锅炉就烧多少。
(2)变负荷/压力速率:锅炉惯性、迟延大,加负荷若只靠基本指令作用,则变负荷、压力速度过慢,所以为了达到要求的变负荷/压力速率要求,必需增加额外的锅炉负荷。
这与汽车提速的道理类似,起步时加大油门实现快速提速,等接近目标速度时逐渐减小油门,减小加速度。
负荷和压力设定值产生的动态补偿就是为了实现这一过程,等到稳态时其输出为0.(3)锅炉蓄热补偿:锅炉压力的改变会引起锅炉蓄热的变化,变负荷(包括一次调频)初期都是通过增、耗锅炉蓄热来实现快速响应的。
负荷变化幅度越大,压力变化越大,需补偿的锅炉蓄热就越大;一次调频幅度越大,需补偿的蓄热也就越大。
六号机一次调频对锅炉蓄热的补偿是通过修正压力偏差实现的,五号机该回路未启用。
锅炉蓄热补偿的数值和作用时间都很短,运行人员基本感觉不到它的作用。
(4)压力调节:以上几部分指令实现了稳态或暂态过程中机、炉能量的基本平衡,实现粗调。
压力调节则实现了机、炉能量平衡的精细调节,维持了主汽压力的稳定。
简单说就是主汽压力低了就加点锅炉出力,反之就减点。
一、汽轮机控制汽轮机控制器是DEH的核心部分。
它通过控制一个或多个高、中压调门的开度来调整进入汽轮机的蒸汽量,达到调节汽轮机转速、负荷或主汽门前压力的目的。
除此以外,西门子汽轮机控制器还具有限制高压叶片压力、高排温度等保护汽轮机的调节功能,并在电网频率出现偏离时能及时增、减机组出力来调整电网频率;机组出现负荷大扰动甚至发生甩负荷后仍能带厂用电或维持汽轮机定速运行。
图3 汽轮机控制简图1、TAB回路TAB即汽机启动和升程限制器,该回路在闭环控制中主要起到一个上限作用。
并网前限制输出≤62%,并网后不再限制。
TAB将各汽轮机启动的操作步骤按先后顺序给予固定,可以认为是汽轮机启动逻辑中的操作票。
2、转速/负荷控制器转速与负荷的联系涉及到转速不等率概念,从调节系统静态特性曲线可以看到,单机运行从空负荷到额定负荷,汽轮机的转速由n2降到n1,该转速变化值与额定转速n0之比称为转速不等率,转速不等率过大,在甩负荷时容易超速,另一方面来说,转速不等率可以用来表征汽轮机转速与功率的对应关系。
我厂的转速不等率为5%,即0到1000MW转速变化为150rpm,因此我厂在100%甩负荷时出现的动态飞升值应该在150rpm左右,即最大转速3150rpm左右。
根据转速不等率的概念可以得到我厂转速与负荷的对应关系如下:△n=△P×0.15DEH中的转速负荷控制回路比图3要复杂得多,但因为我厂并不需要考虑并网后转速控制(小电网系统)或甩负荷后带厂用电运行,所以我们将控制回路简化如图3,以下分析也仅针对我厂运行方式进行。
(1)并网前转速回路的选择开关选择不等率换算回路,调节转速偏差。
负荷回路将负荷设定为0,此时发电机实际负荷也为0,负荷回路偏差为0,实际不起作用,相当于只调节转速。
在此阶段里,程序通过改变转速设定值来满足机组启动需要。
转速设定值由程控自动设定暖机转速和同步转速,在同期并网时可以响应准同期装置请求的升、降转速信号。
当汽轮机出现跳闸、TAB小于50%、过临界时升速率小于100rpm或TSE故障时,转速设定值将变为转速跟踪模式,转速设定值为当前转速-60rpm,以保证调门可靠关闭。
汽轮机不在临界转速区出现TSE 故障时,转速设定值将保持当前值不变。
汽轮机甩负荷时转速设定会有约1秒跟踪实际转速的过渡过程,因为甩负荷的快速响应是通过开环回路快关调门来实现的,闭环回路跟踪即可。
甩负荷后的运行方式属于并网前的一种工况,其转速设定为3000rpm,负荷设定为0。
(2)并网后,限压模式转速回路的选择开关选择一次调频回路,转速设定值为3000rpm。
负荷回路上的初压模式选择开关选择0MW,负荷设定值通过手动设定或由DCS(协调提供)。
该模式下,汽轮机控制负荷并满足一次调频需要。
该模式下,转速回路实际为一次调频回路,即当汽轮机转速(与系统同步)偏差超出2rpm时,汽轮机主动增/减负荷来进行系统调频,其增/减负荷的幅度同样由转速偏差通过转速不等率计算得出。
其幅度不大于60MW,汽轮机功率在400MW到最大负荷限制之间有效。
图4 一次调频当系统频率偏差超出0.5HZ时,不论一次调频是否投入,汽轮机都将主动介入系统调频。
该回路和一次调频使能开关未在图3中标明,如此大频率偏差一般不会有。
在该模式下压力控制回路通过初压模式选择开关将压力设定值降低1MPa,使得压力控制器的输出较转速/负荷控制器要大而不起作用。
当加负荷过程中出现主汽压力低于设定压力0.8MPa时,将触发限压信号,负荷速率限制器将保持当前输出,不再加负荷。
当压力低于设定值1MPa以上时,压力控制器的输出将小于转速/负荷控制器,汽轮机开始调节主汽压力。
3、压力控制器压力控制器相对比较简单,就是维持压力的稳定。
当汽轮机运行于初压模式,压力控制器起作用,即TF运行方式时,一次调频回路自动退出,负荷设定值跟踪实际负荷,并且在负荷设定值基础上增加20.8MW,使得转速/负荷控制器输出大于压力控制器而不起作用。
此时的压力设定值是由DCS根据当前负荷通过滑压曲线计算出来的。
初压和限压的切换,实际就是通过改变负荷和压力设定值来实现控制回路的切换。
4、叶片压力控制器汽轮机冲转初期,蒸汽与汽机与高压缸金属接触,遇冷凝结形成剧烈的热交换,此时蒸汽的饱和温度决定了热交换的剧烈程度。
为了避免因剧烈换热造成缸体热应力过大,就需要对高压叶片压力进行限制,控制此阶段进汽的饱和温度。
叶片压力控制器根据高压缸50%点温度、高压转子温度和对应的许可温差计算出高压缸金属内壁的最高允许值,以此作为汽轮机进汽饱和温度上限值,即进汽压力限制值(第五级压力)。
随着高压缸整体温度的升高,它的介入逐渐减少。
该控制器在汽机自启动顺控第三步投入,在汽机转速超过402r/min时退出。
退出后,调节器的输出值始终是110%,不会对高调门进行限制。
图5 叶片压力控制器示意图5、高排温度控制器在汽轮机通流量较小时,蒸汽流量不足以带走汽轮机叶片与蒸汽摩擦产生的热量,而导致叶片温度上升,热应力增大,甚至超出叶片许用温度,即我们常说的鼓风摩擦。
鼓风热在汽轮机叶片转动线速度最大的末几级叶片最为明显。
高排温度控制器的作用就是在汽轮机总输出功率不变的情况下(如维持3000rpm ),通过降低中、低压缸通流量,增加高压缸通流量来降低高压缸末几级叶片温度。
高排温度控制器根据高压转子温度计算出高压缸叶片温度(12级蒸汽温度)值限制值,温度超出限制值时,高排温度控制器开始介入调节。
图6中,叶片温度超出蓝线进入控制运行区时,高排温度控制器开始调节。
当高压缸叶片温度与保护值的差值>-15K 时,ASD 报警,关高调门切高压缸,开高排通风阀; 差值>-10K 时报警;>0时,汽轮机跳闸。
100200300400500600370390410430450470490510530550正常运行区控制运行区禁止运行区高排温度控制值高压缸末级叶片温度高压转子温度汽轮机保护值图6 高压缸叶片温度限制6、进汽流量设定形成回路TAB 、转速/负荷控制器和压力控制器经中央小选后的输出值作为汽轮机各调门控制的总控制指令,由此指令分别计算出高压调门流量设定值、补气阀流量指令值和中压调门流量设定值。
高压调门流量设定值形成的计算公式为:Y=X/0.8,其中X 为当中央小选块输出值(受叶片压力控制器限制),即小选输出到80%以上时,高压调门全开。
补汽阀流量设定值形成的计算公式为:Y=(X-0.78)/(1-0.78),补汽阀在中央小选输出到78%以上时开启。
中压调门流量设定值的计算公式为:Y=(X-a)/(0.56-a),其中X为中央小选输出减去高排温度控制器输出后的值。
a为一个常数,当汽轮机转速大于1998rpm时,a=0.16;转速不大于1998rpm时,a=0.04。
由此可以看出,在汽轮机冲转初期,中调门在X输入达到4%即开启,这有利于在高压缸进汽压力受限时的汽轮机升速控制;汽轮机暖机结束后(>1998rpm),中调门即恢复到正常的16%以后开启。
当X值大于56%时,中调门全开。
7、调门阀位设定各调门进汽流量设定形成后,并不能直接作为阀位信号,因为绝大部分调阀的开度与通流量并不成正比。
所以流量指令还需通过阀门通流特性曲线转换成阀位指令,以实现精准调节。
各调门在ATT试验该阀或汽轮机投入快冷时,调阀直接由阀位限制控制,而不再接受流量设定指令。
各调门指令通过伺服阀来控制阀门油动机的活动,但伺服阀的控制并不能完全满足所有控制要求,在甩负荷等要求快速关闭调门的工况时,还需要通过跳闸电磁阀来实现快速关闭。
当以下条件同时满足时,控制系统将跳闸电磁阀失电实现调门快关:(1)调门实际阀位大于3%。
(2)根据调门实际阀位换算出来的调门通流量比调门的设定通流量超出30%以上,即调门关闭慢。
(3)调门阀位测量和监视器无故障。
(4)没有跳闸电磁阀已失电。
(5)不在EH油顺控第52步,强制阀位输出最大。
高调门的快关指令会发给中调门的阀位控制器子模块,引起中调门快关。