盘式刀库
链刀、盘式。斗笠式刀库
链式、盘式、斗笠刀库刀库系统是提供自动化加工过程中所需之储刀及换刀需求的一种装置;其自动换刀机构及可以储放多把刀具的刀库;改变了传统以人为主的生产方式。
藉由电脑程式的控制,可以完成各种不同的加工需求,如铣削、钻孔、搪孔、攻牙等。
一、圆盘式刀库圆盘式刀库应该称之为固定地址换刀刀库,即每个刀位上都有编号,一般从1编到12、18、20、24等,即为刀号地址。
操作者把一把刀具安装进某一刀位后,不管该刀具更换多少次,总是在该刀位内。
1. 制造成本低。
主要部件是刀库体及分度盘,只要这两样零件加工精度得到保证即可,运动部件中刀库的分度使用的是非常经典的“马氏机构”,前后、上下运动主要选用气缸。
装配调整比较方便,维护简单。
一般机床制造厂家都能自制。
2. 每次机床开机后刀库必须“回零”,刀库在旋转时,只要挡板靠近(距离为0.3mm左右)无触点开关,数控系统就默认为1号刀。
并以此为计数基准,“马氏机构”转过几次,当前就是几号刀。
只要机床不关机,当前刀号就被记忆。
刀具更换时,一般按最近距离旋转原则,刀号编号按逆时针方向,如果刀库数量是18,当前刀号位8,要换6号刀,按最近距离换刀原则,刀库是逆时针转。
如要换10号刀,刀库是顺时针转。
机床关机后刀具记忆清零。
3. 固定地址换刀刀库换刀时间比较长国内的机床一般要8秒以上(从一次切削到另一次切削)。
4. 圆盘式刀库的总刀具数量受限制,不宜过多,一般40#刀柄的不超过24把,50#的不超过20把,大型龙门机床也有把圆盘转变为链式结构,刀具数量多达60把。
)圆盘刀库。
如图7.1(b)-(g)所示,存刀量少则6把-8把,多则50把-60把,有多种形式。
图7.1(b)所示刀库,刀具径向布置,占有较大空间,一般置于机床立柱上端。
图7.1(c)所示刀库,刀具轴向布置,常置于主轴侧面,刀库轴心线可垂直放置,也可以水平放置,较多使用。
图7.1(d)所示刀库,刀具为伞状布置,多斜放于立柱上端。
数控加工中心盘式刀库设计

数控加工中心盘式刀库设计一、设计目标1.提高数控加工中心刀具管理效率,减少刀具更换时间,提高加工效率;2.提高数控加工中心的加工精度和质量;3.方便操作和维护。
二、设计方案1.刀库结构设计(1)刀库选用盘式刀库,能够同时存放多种刀具,提高刀具的配套程度,方便操作人员进行刀具更换;(2)采用旋转结构,可以通过旋转盘来选择所需刀具,同时盘式刀库还可以实现自动刀具更换,提高加工效率;(3)刀具位置间隔合理,避免相互干扰,保证刀具的整齐摆放。
2.刀库容量设计(1)根据加工中心的加工需求确定刀具种类和数量,根据需求确定刀库的容量大小,确保能够存放足够多的刀具;(2)根据加工需求,将相似的刀具进行归类,减少刀具种类的多样性,以便提高刀库的利用率;(3)合理规划刀库的存储空间,减少刀具占地空间,节省仓储成本。
3.刀具的标识和管理(1)为每个刀具设计明确的编号和标识,便于操作人员快速找到所需刀具;(2)建立刀具管理系统,对刀具进行清点和登记,记录刀具的使用寿命和更换次数,及时进行维护和更换;(3)对于长期不用或使用寿命超出的刀具,及时进行检修或报废。
4.刀具存放环境设计(1)为刀具提供干燥、清洁和稳定的环境,减少刀具的氧化和磨损;(2)设置恒温和湿度控制设备,以保持刀具的稳定性;(3)选择合适的材料和涂层,提高刀具的耐磨性和使用寿命。
5.刀库的维护和保养(1)定期对刀库进行清洁和检查,清除切屑和尘土,避免切削液对刀具的腐蚀和影响;(2)定期检查刀具的切削力和切削温度,根据使用情况调整刀具的加工参数;(3)定期检查刀具组件的磨损情况,及时更换磨损的零部件,保证刀库的正常运行。
三、设计方案的优势1.盘式刀库能够同时存放多种刀具,减少了刀具更换时间,提高了加工效率;2.盘式刀库的旋转结构和自动刀具更换功能,进一步提高了加工效率;3.刀库容量设计合理,充分考虑了加工需要和刀具种类,节省了仓储成本;4.刀具的标识和管理方便操作和维护,提高了刀具的使用寿命和维修周期;5.刀库的环境设计和维护保养能够保证刀具的稳定性和使用寿命。
加工中心16刀刀库(盘式刀库)
加工中心16刀刀库(盘式刀库)刀库是自动换刀装置中最主要的部件之一,其容量、布局以及具体结构对加工中心的设计有很大影响。
刀库是在小型加工中心应用最为广泛,根据使用的场合和实际运用的要求,设计了相应的刀的圆盘式刀库,并且对它的控制进行了一定的研究。
论文首先对刀库总体设计方案进行阐述,阐述其各部件的工作原理,然后就刀库的结构设计与控制分章节对各个部分进行计算与设计。
刀库的结构设计是本文研究的重点,传动部分为蜗杆蜗轮的一种减速装置,对于该装置中的蜗杆、蜗轮以及相关的轴都进行了详细的计算;控制部分为刀库送刀部分,由液压控制和PLC控制完成。
第一章绪论本章首先从数控机床的发展历程引出加工中心的发展趋势,再具体到本次设计针对的刀库的任务要求,明确了本设计任务的主要内容。
1.1 引言1952年世界上出现了第一台数控机床,使多品种、中小批量的机械加工设备在柔性、自动化和效率上产生了巨大变革。
1958年第一台加工中心问世,它将多工序(铣、钻、镗、铰、攻丝等)加工集于一身;适应加工多品种和大批量的工件;增加机床功能(自动换刀、自动换工件、自动检测等),使自动化程度和加工效率上了一个新台阶;使无人化(或长时间无人操作)加工成为现实。
加工中心已成为柔性制造系统、计算机集成制造系统和自动化工厂的基本单元。
加工中心是数控机床的代表,是高新技术集成度高的典型机电一体化机械加工设备,受到世界各工业发达国家的高度重视,技术迅速发展,品种和数量大幅度增加,成为当今世界机械加工设备中最引人注目的一类产品。
1.2 加工中心简介1.2.1加工中心的发展简史1952年世界上出现第一台数控机床,使多品种、中小批量的机械加工设备在柔性、自动化和效率上产生了巨大变革。
它用易于修改的数控加工程序进行控制,因而比大批量生产重使用组合机床生产线和凸轮、开关控制的专用机床有更大的柔性,容易适应加工件品种的变化,进行多品种加工。
它用数控系统对机床的工艺功能、几何图形运动功能和辅助功能实行全自动的数字控制,因为有更高的自动化程度和加工效率,大大改变了中小批量生产中普通机床占整个机械加工70%~80%的状况。
数控加工中心盘式刀库设计

摘要90年代以来,数控加工技术得到迅速的普及及发展,高速加工中心作为新时代数控机床的代表,已在机床领域广泛使用。
自动换刀刀库的发展俨然已超越其为数控加工中心配套的角色,在其特有的技术领域中发展出符合机床高精度、高效率、高可靠度及多任务复合等概念的独特产品。
刀库作为加工中心最重要的部分之一,它的发展也直接决定了加工中心的发展。
本论文完成的是盘式刀库的总体设计、传动设计、结构设计,在确定了整体设计方案后,运用UG对整个盘式刀库进行了实体建模和运动仿真分析。
分析结果显示,整个系统无干涉,且整体运行平稳。
运用 ANSYS 对系统的关键部件进行了受力和变形分析。
结果显示:系统关键部件设计合理,变形量在设计范围之内。
这种刀库在数控加工中心上应用非常广泛,其换刀过程简单,换刀时间短,定位精度高;总体结构简单、紧凑,动作准确可靠;维护方便,成本低。
本刀库传动部分分两级减速,一级传动部分采用直齿轮减速装置,二级传动部分采用蜗轮蜗杆减速装置,此种设计方案可提高输出轴的传动平稳性能,即提高刀盘的运转平稳性。
本刀库满载装刀24把,采用单环排列方式排放。
关键词:加工中心;刀库;数控加工AbstractSince the 1990s, CNC machining technology has been rapidly gaining popularity and development. As a new era of high-speed machining center CNC machine tools represent, have been widely used in the field of machine tools. Automatic tool changer magazine seems to have gone beyond the development of CNC machining centers supporting its role in the field of its unique technology developed to meet the machine precision, high efficiency, high reliability and multi-task complex concepts such unique products. Magazine as a processing center one of the most important parts, and its development is also directly determines the machining center.In this thesis, completed the disc magazine's overall design, transmission design, structural design, in determining the overall design, the use of UG to the entire disc magazine conducted a physical modeling and motion simulation analysis. The results showed that the system without interference and the overall smooth operation. Using ANSYS on the system key components of stress and deformation analysis. The results showed that: the system key component design is reasonable, the amount of deformation in the design range. This magazine in CNC machining center is widely used, its tool change process is simple, tool change time is short, high positioning accuracy; overall structure is simple, compact, accurate and reliable; easy maintenance, and low cost. The magazine drive part of two deceleration, a transmission part adopts straight gear reduction, two transmission part adopts worm gear unit, such a design can improve the output shaft of the transmission smooth performance, that is, raising the cutter smooth operation sex. The magazine full loaded knife 24, the use of single-ring arrangement emissions.Keywords: machining centers; magazine; CNC machining目录摘要 .............................................................................................. 错误!未定义书签。
圣杰原装斜盘式刀库安全操作及保养规程
圣杰原装斜盘式刀库安全操作及保养规程1. 前言圣杰原装斜盘式刀库是一款用于存储和管理刀具的设备。
在使用和保养刀库时,为确保操作安全以及延长设备寿命,我们制定了本规程。
请用户在使用刀库之前务必详细阅读并遵守以下操作和保养指南。
2. 操作指南2.1. 安装和调试安装圣杰原装斜盘式刀库需要专业人士进行,确保刀库安装平稳、牢固,不会发生倾斜或摇晃现象。
操作人员在使用刀库之前,必须接受相关设备操作培训,并具备相关操作证书。
2.2. 开关电源在操作刀库之前,确认电源是否接通,确保电源线没有损坏。
正确地开启和关闭刀库电源可以有效保护刀具和设备。
2.3. 操作平台在使用刀库之前,确认操作平台是否已清理干净,并保持干燥。
操作人员应保持操作平台的整洁,清除可能影响刀具的尘土和碎屑。
2.4. 刀具存放•存放刀具前,确认刀具是否干净并且完好无损。
如有磨损或损坏,请及时更换。
•在存放刀具之前,确认是否与其他刀具相撞或相互干扰。
合理摆放刀具,避免刀具之间的碰撞,可以延长刀具寿命。
•存放刀具时,保持刀具刃口朝下。
这样可避免误操作导致的刀具伤害。
2.5. 刀具选择和更换•根据加工需求,正确选择刀具类型和规格。
•切勿在刀具转动时更换刀具。
在更换刀具时,确保刀库处于关闭状态并停止刀具转动。
•更换刀具前,确保刀具存放平台干净。
如有油污或异物,请清洗干净。
2.6. 刀库启动和停止•启动刀库前,请确保操作人员远离刀库工作区域。
•启动刀库时,确保刀库处于稳定状态,确保工作平台干净。
•在停止刀库之前,等待刀具停止转动,并确保平台稳定。
2.7. 异常情况处理•在刀库工作过程中,如果发现刀具卡住或异常情况,请及时停机检查。
•在检查刀具和设备时,务必关闭电源并等待刀具完全停止。
3. 保养指南3.1. 常规保养•定期清洁刀库外壳,保持干净整洁。
•关注刀库传动部件的润滑情况,确保传动顺畅。
•注意检查电源线、插头等电器元件是否损坏。
3.2. 定期维护•按照设备使用说明书和维护手册的要求,定期维护设备。
盘式刀库
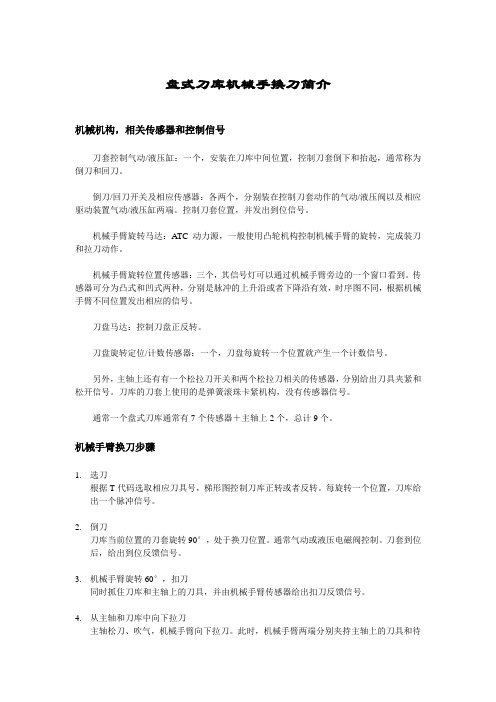
盘式刀库机械手换刀简介机械机构,相关传感器和控制信号刀套控制气动/液压缸:一个,安装在刀库中间位置,控制刀套倒下和抬起,通常称为倒刀和回刀。
倒刀/回刀开关及相应传感器:各两个,分别装在控制刀套动作的气动/液压阀以及相应驱动装置气动/液压缸两端。
控制刀套位置,并发出到位信号。
机械手臂旋转马达:A TC动力源,一般使用凸轮机构控制机械手臂的旋转,完成装刀和拉刀动作。
机械手臂旋转位置传感器:三个,其信号灯可以通过机械手臂旁边的一个窗口看到。
传感器可分为凸式和凹式两种,分别是脉冲的上升沿或者下降沿有效,时序图不同,根据机械手臂不同位置发出相应的信号。
刀盘马达:控制刀盘正反转。
刀盘旋转定位/计数传感器:一个,刀盘每旋转一个位置就产生一个计数信号。
另外,主轴上还有有一个松拉刀开关和两个松拉刀相关的传感器,分别给出刀具夹紧和松开信号。
刀库的刀套上使用的是弹簧滚珠卡紧机构,没有传感器信号。
通常一个盘式刀库通常有7个传感器+主轴上2个,总计9个。
机械手臂换刀步骤1.选刀根据T代码选取相应刀具号,梯形图控制刀库正转或者反转。
每旋转一个位置,刀库给出一个脉冲信号。
2.倒刀刀库当前位置的刀套旋转90°,处于换刀位置。
通常气动或液压电磁阀控制。
刀套到位后,给出到位反馈信号。
3.机械手臂旋转60°,扣刀同时抓住刀库和主轴上的刀具,并由机械手臂传感器给出扣刀反馈信号。
4.从主轴和刀库中向下拉刀主轴松刀、吹气,机械手臂向下拉刀。
此时,机械手臂两端分别夹持主轴上的刀具和待换目标刀具。
主轴端和刀库端同时完成动作。
5.机械手臂旋转180°,换刀机械手臂拉刀到位后,旋转180°,主轴上刀具和待换目标刀具交换,旋转到位后,机械手臂给出到位信号。
6.刀具向上插入主轴和刀库机械手臂向上,将刀具同时插入主轴和当前刀套,主轴将刀具卡紧。
主轴端和刀库端同时完成动作。
7.反向旋转60°机械手臂反向旋转回原位,完成一个换刀动作。
圆盘式刀库原装安全操作及保养规程
圆盘式刀库原装安全操作及保养规程随着现代化工业和生产技术的不断发展,机械设备逐渐普及,圆盘式刀库作为一种常用的工业切割工具,已经被广泛使用。
在使用过程中,圆盘式刀库的安全和维护都至关重要。
本文将介绍圆盘式刀库的原装安全操作及保养规程,以确保设备的高效、稳定和安全运行。
1. 圆盘式刀库的准确安装首先,我们必须尊重和遵守生产厂家提供的规程和建议。
在安装圆盘式刀库之前,必须先确定设备本身的方向和位置,然后把它放置在固定的地面上。
同时,应根据刀具直径和工作件的尺寸系数,选定装置。
设备的校准、对称和比配等也是非常重要的,必须确保刀具的精准性和稳定性,以减少由于安装问题而带来的危险。
2. 圆盘式刀库的操作规程在操作圆盘式刀库时,必须遵守以下操作规程:2.1 开机前检查在开启圆盘式刀库前,必须检查刀具、传动件、电气系统以及设备的安全防护系统是否正常。
检查过程必须由经过专业培训的人员进行。
2.2 引导方式在使用圆盘式刀库时,一定要明确加工件的状态和加工要求,并根据加工物体的状态选择合适的工装。
切割刀具选择也必须考虑到加工物料的特性、硬度和形态等因素。
在进行切割时,必须进行严格的折线引导和切割速度控制,以确保切割工作的安全和精确性。
2.3 停机操作在停机操作前,必须先将加工剩余件和废料清除。
同时,刀具应该完全停止后再进行停机操作。
2.4 加工过程中的异常处理在加工过程中,如出现异常情况,如烟雾、刀具噪音异常、加工精度下降等,应立即停机并排除异常情况。
如果无法解决,则必须寻求专业技术服务。
3. 圆盘式刀库的日常维护为了确保圆盘式刀库的安全和性能,必须定期进行以下维护:3.1 刀具的维护刀具的损耗是正常的,但也要做好及时更换工作。
同时,对每一次刀具使用后要获得的修整,确保其精度,并在处理后及时进行保护。
刀具对于圆盘式刀库及其使用者来说都是非常重要的,连续使用的刀具会使切割效果逐渐降低,于是及时的维护和保养会使其精度和品质达到更好的效果。
加工中心刀库分类、特点及典型故障分析
••AC..松装刀置机调构整回不退当故或障加。工误差过大而造成拨叉位置不正确。
••BD..限刀位具开超关重安。装不正确或调整不当而造成反馈信号错误。
5.刀具夹紧后松不开
•A.松锁的弹簧压合过紧或碟簧断裂,导致刀杆伸 缩量不够。
刀库故障
1.刀库不能转动的原因可能有:
•①联接电机轴与蜗杆轴的联轴器松动;
•②变频器故障,应检查变频器的输入、输出电压是 否正常; •2•.③ 刀库PL转C无不控到制位输的出原,因可可能能是有接:口板中的继电器失效; •3••.④ 刀电套动机不机械能转连夹动接紧故过刀障紧具,;原传因动可机能构是误差。 ••⑤A.电刀网套电上压的过调低整。螺钉松动。
⑷经常检查刀库的回零位置是否正确,检查机床主轴回换 刀点位置是否到位,发现问题要及时调整,否则不能完成换 刀动作。
⑸要注意保持刀具刀柄和刀套的清洁。 ⑹开机时,应先使刀库和机械手空运行,检查各部分工作 是否正常,特别是行程开关和电磁阀能否正常动作。检查机 械手液压系统的压力是否正常,刀具在机械手上锁紧是否可 靠,发现不正常时应及时处理。
(5)主轴系统有问题,刀具是靠碟簧通过拉杆和弹簧卡头而将刀具柄尾端 的拉钉拉紧的;松刀时,液压缸的活塞杆顶压顶杆,顶杆通过空心螺钉 推动拉杆,一方面使弹簧卡头松开刀具的拉钉,另一方面又顶动拉钉, 使刀具右移而在主轴锥孔中变“松”。
主轴系统不松刀的原因有以下5点: ①刀具尾部拉钉的长度不够,致使液压缸虽已运动到位,而仍未将刀具 顶“松”; ②拉杆尾部空心螺钉位置起了变化,使液压缸行程满足不了“松刀”的 要求; ③顶杆出了问题,已变形或磨损; ④弹簧卡头出故障,不能张开: ⑤主轴装配调整时,刀具移动量调得太小,致使在使用过程中一些综合 因素导致不能满足“松刀”条件。
三轴立式加工中心圆盘式刀库结构设计

三轴立式加工中心圆盘式刀库结构设计在三轴立式加工中心中,刀具库是非常关键的组成部分,其结构设计对于加工中心的性能和效率起着重要作用。
而圆盘式刀库是一种常见的刀库结构,其能够容纳多个刀具,实现快速刀具更换,提高加工效率。
本文将对圆盘式刀库的结构设计进行详细阐述。
首先,圆盘式刀库的设计需要考虑的重要因素是刀具的数目和种类。
根据加工中心的需求,需要确定刀具的数目以及每个刀具的类型。
常见的刀具有铣刀、钻头、螺纹刀等,可以根据加工需要进行选择。
在设计刀具库的时候,需要考虑到各个刀具之间的间距,以便于刀具的快速更换和存放。
其次,刀库的结构设计需要考虑到刀具的安全性和稳定性。
刀具的安全性是非常重要的,因为刀具在高速加工中会有较大的惯性力和振动力,如果刀具不稳定会导致加工精度下降甚至出现安全事故。
设计时可以考虑采用合理的刀具固定方式,如夹爪、弹簧等,确保刀具的稳定性。
另外,可以通过调整刀库的结构,提供刀具的支撑和减震装置,减少刀具的振动和冲击。
此外,刀库的结构设计还需要考虑到刀具的存放和取放的便捷性。
刀具库的设计需要确保刀具的存放和取放方便快捷,以便于加工中心的操作人员进行刀具的更换。
可以采用旋转结构,使得刀具可以快速转到操作人员的工作位置,方便操作人员进行刀具的更换。
此外,可以在刀库的外部设置RFID或者条码识别系统,方便刀具的管理和追溯。
最后,刀库的结构设计还可以考虑到刀具的自动检测和调整功能。
在刀具库的设计中,可以设置自动检测装置,实时监测刀具的磨损情况和刀具上的故障。
当刀具出现磨损或者故障时,可以通过刀库的自动调整装置,自动更换刀具或者调整刀具位置,保证加工质量和效率。
综上所述,圆盘式刀库的结构设计是三轴立式加工中心中非常重要的一个环节。
在设计时,需要考虑刀具的数目和种类、刀具的安全性和稳定性、刀具的存放和取放的便捷性以及刀具的自动检测和调整等因素。
通过合理的结构设计,可以提高加工中心的性能和效率。
刀库是数控机床中的重要组成部分

刀库是数控机床中的重要组成部分,主要用于存放加工过程中需要的刀具。
在使用时,刀库能够根据程序的指令自动更换刀具,从而提高加工效率。
本文将介绍刀库的基本知识,包括其分类、结构、工作原理以及维护方法。
一、刀库的分类刀库的分类方式有多种,根据其结构特点和使用方式,可以分为以下几类:1.链式刀库链式刀库是一种常见的刀库类型,其结构类似于链条式输送机。
刀具沿着链条上的插槽放置,通过链条的移动实现刀具的更换。
这种刀库的容量较大,适用于大型数控机床。
2.圆盘式刀库圆盘式刀库是一种较小的刀库,通常用于小型数控机床。
其结构类似于一个圆盘,刀具沿着圆周排列,通过圆盘的旋转实现刀具的更换。
3.机械手刀库机械手刀库是一种自动化程度较高的刀库,通过机械手或机器人等装置实现刀具的更换。
这种刀库的结构复杂,成本较高,但能够提高机床的自动化程度和加工精度。
二、刀库的结构不同类型的刀库结构有所不同,但通常包括以下组成部分:1.刀具存放部分:用于存放刀具的装置,如链条或圆盘上的插槽、机械手抓取刀具的夹具等。
2.驱动部分:用于驱动刀库运动的装置,如链条驱动器、电机、齿轮等。
3.换刀部分:用于实现刀具更换的装置,如机械手、换刀器等。
4.传感器部分:用于检测刀具位置和数量的传感器,如光电传感器、限位开关等。
三、刀库的工作原理不同类型的刀库工作原理也有所不同,以下是常见的几种刀库的工作原理:1.链式刀库链式刀库的工作原理是通过链条驱动器驱动链条转动,将需要更换的刀具移动到换刀位置。
然后,机械手或换刀器将旧刀具从主轴取下,再将新刀具装载到主轴上。
2.圆盘式刀库圆盘式刀库的工作原理是通过电机驱动圆盘旋转,将需要更换的刀具移动到换刀位置。
然后,机械手或换刀器将旧刀具从主轴取下,再将新刀具装载到主轴上。
3.机械手刀库机械手刀库的工作原理是通过机械手或机器人装置实现刀具的自动更换。
机械手能够自动识别和抓取刀具,通过高精度的定位和运动控制系统实现快速、准确的换刀操作。
盘式刀库机构分析

盘式刀库机构分析1盘式刀库机构组成盘式刀库机构主要由动力传动装置,刀盘,机械手等主要部件组成。
1.1动力传动装置主要由交流伺服电机经过减速机构,带动齿圈,使之与齿圈通过螺栓连结的12个工位刀盘旋转。
可以通过数控系统对电机进行控制,实现需要的转速。
1.2刀盘设计刀盘通过螺栓与齿圈连接固定,由刀库的传动装置驱动齿圈,带动刀盘旋转,实现自动换刀过程的选刀和定位。
刀盘有12个工位,每个工位安装一组2个刀夹定位块,每组定位块上均可放置所需的刀夹,刀具。
1.3机械手设计机械手由机械手臂和手指2部分组成。
机械手臂在液压的控制下带动机械手指进行工作。
推拉油缸右端的送刀进油口来油时,推动活塞带动机械手手臂将刀架所需更换的刀夹从刀库中送出,此时左端的取刀进油口回油。
同时,液压油经导向杆内的油孔作用于机械手手臂的小活塞上,推动手指钩,完成勾住刀夹的动作。
推拉油缸左端的取刀进油口来油时,推动活塞带动机械手臂将刀架不需要的刀夹取回刀库,此时右端的送刀进油口回油。
2工作原理盘式刀库的工作主要由机械手臂的3个位置(1.机械手臂在刀盘旋转的时候的位置;2.从刀盘取刀到将刀具送回刀盘的位置;3.将刀具从车床上取出及将刀具送到车床的位置)和机械手指的放松和夹紧2种状态来实现的。
机械手臂的定位通过位置判断开关来实现,通过无触点式接近开关来控制机械手臂的移动。
换刀过程开关包括机械手初始位置判断开关,取刀到位判断开关,送刀到位判断开关3部分,选用无触点式接近开关。
3个开关通过调整用安装支架固定在刀库连接板上,因结构需要,共用1个感应块,感应块分3个感应区域,每个区域对应1个开关。
在结构上,把3个开关固定在与机身相连的滑轨上,以螺栓连接固定。
需要调整时只需将螺栓松开将开关在滑轨上移动后再固定就可以实现初始位置,取刀位置和送刀位置的调整。
而且在取,送刀的过程中直接利用无触点式接近开关直接发出信号,配合反应迅速的液压系统,可以实现取,送刀动作在控制上的精确执行,完成整个换刀过程。
毕业设计:盘式刀库及其自动换刀装置的设计说明书
1 绪论1.1数控加工中心自动换刀装置概述机床是制造机器的机器,机床工业的技术水平决定着装备制造业乃至整个国民经济的技术水平。
当今社会,数控机床几乎已经扩展到了所有加工领域,许多工厂为了适应产品的频繁更新、提高加工精度、降低生产成本、缩短产品交货周期和减轻劳动强度,在中等批量、甚至大批量生产中应用数控机床,并取得了良好的经济效益。
数控加工中心带有刀库和自动换刀装置,是能对工件按预定程序进行多工序加工的高度自动化的多功能的数字控制机床。
自动换刀装置(ATC)是加工中心的重要组成单元,其设计质量的好坏,直接影响加工中心的质量。
ATC由刀库和机械手组成,它的机构和运动复杂、性能要求高。
刀库的功能是储存刀具,并且按程序指令,把即将要用的刀具迅速、准确地送到换刀位置,因此刀库的位置、体积大小能否适合加工中心的整体设计,刀库的运动机构能否使刀库平稳运转并准确地停在换刀位置,运动过程有无干涉、卡死等现象,都是设计人员非常关心的问题。
机械手的功能是把刀库上的刀具送到主轴上,再把主轴上已用过的刀具送回刀库。
它的动作要求迅速而准确,所以对机构的结构、定位、运动、夹持力的大小等都有很高的要求,一旦有运动故障或定位、运动误差过大,都会造成换刀动作失败,掉刀。
当今时代,高速加工中心已成为加工行业未来的发展趋势。
高速功能部件如电主轴、高速丝杠和直线电动机的发展应用极大地提高了切削效率。
为了配合机床的高效率,作为加工中心的重要部件之一的自动换刀装置的高速化也相应成为高速加工中心的重要技术内容。
未来机床产业的发展,均以追求高速、高精度、高效率为目标。
随着切削速度的提高,切削时间的不断缩短,对换刀时间的要求也在逐步提高;换刀的速度已成为高等级机床的一项重要指标。
因此,对数控机床的刀库及其自动换刀装置的研究和发展有着重要的意义。
1.2国内外自动换刀装置设计的发展情况自动换刀系统是数控机床的重要组成部分。
刀具夹持元件的结构特性及它与机床主轴的联结方式,将直接影响机床的加工性能。
圆盘式刀库圣杰安全操作及保养规程

圆盘式刀库圣杰安全操作及保养规程前言圆盘式刀库圣杰是一种常见于数控加工中心、车床等机床上的用于存放、切换刀具的设备。
在使用过程中,为了保证操作人员和设备的安全,以及保证设备的正常运转和寿命,需要制定相关的安全操作规程和保养规程。
本文将详细介绍圆盘式刀库圣杰的安全操作和保养规程。
安全操作规程1. 使用前检查每次使用前,都需要对圆盘式刀库圣杰进行检查。
首先要检查圆盘式刀库的固定螺丝有无松动情况,如果有松动情况需要拧紧螺丝;其次,要检查刀具有无异常情况,如刀具的锈蚀、损坏、过度磨损等问题。
如果出现这种情况需要按照相关规定将刀具更换后才能使用。
2. 空载试运转在正式使用之前,必须进行空载试运转。
试运转可进行停车、转盘调试、运转方向、刀位检查等操作,确保设备运转正常,安全和可靠。
试运转时必须关闭刀盘与工具刀头的交换程序,切勿将不符合标准的刀具调入运转。
3. 软件设置在进行设备的计算机软件设置时,必须仔细检查设备的数据传输口有无松动或接触不良现象,使用合格的数据传输线进行连接,确保设备的数据传输的准确性和可靠性。
软件设置需要按照预设的方法进行,禁止擅自更改系统程序。
4. 合理使用在实际使用中,必须按照规定使用圆盘式刀库。
应尽量避免刀具切割一段时间后不尽快将刀具取出,以免刀具产生变形,造成设备损伤或者制品质量下降。
同时,在操作过程中要尽可能减少因机床振动、油污等因素所产生的简直,以保证设备平稳运转。
5. 关机后的操作在使用结束后,必须关闭设备电源,并在规定时间内将设备内的刀具全部取出,并清理设备内部的残渣和油污等物质,以确保设备的清洁和保养。
6. 加油和清洁在使用中,要及时为圆盘式刀库加油,以免在运转中因缺油而造成设备的损坏。
同时,应定期对设备进行清洁,保证设备的卫生环境,减少因灰尘、残渣等因素所产生的设备损坏。
保养规程1.刀具的更换当出现刀具磨损、损坏或无法正常运作时,必须及时更换。
更换时应严格按照设备手册和标准进行操作。
圆盘式刀库工作原理

圆盘式刀库工作原理
圆盘式刀库是一种自动化的刀具储存和切换装置,它通常由一个圆盘、多个刀位和驱动装置组成。
其工作原理如下:
1. 初始状态:圆盘平放在工作台上,刀位都为空。
2. 刀具装载:操作员将要使用的刀具按照顺序插入到圆盘的刀位中,每个刀位只能容纳一个刀具。
3. 刀具固定:插入刀具后,圆盘上的夹持装置会自动夹住刀具,确保其牢固固定在刀位上。
4. 刀具识别:每个刀位通常都配备了一个刀具传感器,它能够检测到刀具的类型和属性。
在插入刀具后,传感器会将刀具的信息发送给控制系统进行识别和记录。
5. 旋转切换:当需要更换刀具时,控制系统会发出指令,驱动装置开始旋转圆盘。
旋转时,圆盘上的刀位会依次经过一个固定位置,该位置上配备了一个刀具取放装置。
6. 刀具取放:当刀位经过固定位置时,刀具取放装置会根据控制系统的指令,将需要更换的刀具从刀位上取下,同时将要放置的刀具插入刀位。
该过程通常需要非常精确的定位和夹持操作。
7. 完成更换:当控制系统确认刀具更换完成后,圆盘停止旋转,刀库恢复到初始状态。
新的刀具已经装载好,可以开始进行下
一次的切削加工。
总的来说,圆盘式刀库通过旋转圆盘和刀具取放装置的协调配合,实现了自动刀具的储存和切换。
它可以提高机床的生产效率和自动化程度,减少人工操作的错误和劳动强度。
983盘式刀库调试操作

983刀库(盘式)刀号调试操作过程
1:先按MDI键,程序开关钥匙拨到关方向。
2:按参数键
3:按屏幕下方扩展键(+)或(→)显示参数开关
4:把光标移到参数开关后面0上面输入1按下输入键,再按下确定(屏幕下方扩展键)5:控下返回,返回到参数界面,按下PLC扩展键,
6:按英文N再输入2101按下输入键
7:输入英文P ,输入刀库对应主轴刀号
8:按下输入键,再按下输入键
9:返回参数开关界面输入0,返回
10:完成
NC320-0
NC321-6
3002-10100001
3003-10000001
3006-01000000
3010-00000010
3011-11000000
2001-总刀数
2101刀库当前刀
4000-4016刀库数据表
1)手动状态:同时按下刀库调试和暂停(进入调试刀库状态)
2)同时按下刀库调试和多功能键(usru1)三秒,数据表初始化
3)同时按下刀库调试和机械手转动,(机械手就会转动)
4)刀库调试状态下,在刀套向上位置,按下唯一的(空白)按键,可点动刀盘正转,刀号向上。
BT40型圆盘式刀库

BT40型圆盘式刀库
产品特点:
1、刀库配置高强度复合材料刀套,耐腐蚀,外形美观,互换性好;
2、刀盘分度采用圆柱凸轮分度机构,分度精确,运转平稳无噪音;
3、倒刀采用连杆放大机构,动作平稳可靠;
4、换刀机构夹刀准确,夹持力强,绝不掉刀;
5、手爪与手臂用45#钢锻造制作,结构紧凑强度高;扣刀角度及
刀臂旋转直径可依机型设计,多规格备选;
6、刀库采用接近开关控制,确保动作准确无误;
7、功能部件名牌配置,性能更佳,可靠性更好;
8、刀库系列化、标准化、模块化设计,结构紧凑、外形美观,互
换性好,安装、调整、维修方便。
性能参数:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盘式刀库机械手换刀简介机械机构,相关传感器和控制信号刀套控制气动/液压缸:一个,安装在刀库中间位置,控制刀套倒下和抬起,通常称为倒刀和回刀。
倒刀/回刀开关及相应传感器:各两个,分别装在控制刀套动作的气动/液压阀以及相应驱动装置气动/液压缸两端。
控制刀套位置,并发出到位信号。
机械手臂旋转马达:A TC动力源,一般使用凸轮机构控制机械手臂的旋转,完成装刀和拉刀动作。
机械手臂旋转位置传感器:三个,其信号灯可以通过机械手臂旁边的一个窗口看到。
传感器可分为凸式和凹式两种,分别是脉冲的上升沿或者下降沿有效,时序图不同,根据机械手臂不同位置发出相应的信号。
刀盘马达:控制刀盘正反转。
刀盘旋转定位/计数传感器:一个,刀盘每旋转一个位置就产生一个计数信号。
另外,主轴上还有有一个松拉刀开关和两个松拉刀相关的传感器,分别给出刀具夹紧和松开信号。
刀库的刀套上使用的是弹簧滚珠卡紧机构,没有传感器信号。
通常一个盘式刀库通常有7个传感器+主轴上2个,总计9个。
机械手臂换刀步骤1.选刀根据T代码选取相应刀具号,梯形图控制刀库正转或者反转。
每旋转一个位置,刀库给出一个脉冲信号。
2.倒刀刀库当前位置的刀套旋转90°,处于换刀位置。
通常气动或液压电磁阀控制。
刀套到位后,给出到位反馈信号。
3.机械手臂旋转60°,扣刀同时抓住刀库和主轴上的刀具,并由机械手臂传感器给出扣刀反馈信号。
4.从主轴和刀库中向下拉刀主轴松刀、吹气,机械手臂向下拉刀。
此时,机械手臂两端分别夹持主轴上的刀具和待换目标刀具。
主轴端和刀库端同时完成动作。
5.机械手臂旋转180°,换刀机械手臂拉刀到位后,旋转180°,主轴上刀具和待换目标刀具交换,旋转到位后,机械手臂给出到位信号。
6.刀具向上插入主轴和刀库机械手臂向上,将刀具同时插入主轴和当前刀套,主轴将刀具卡紧。
主轴端和刀库端同时完成动作。
7.反向旋转60°机械手臂反向旋转回原位,完成一个换刀动作。
更新数据表。
快速换刀目前各机床厂家通常使用两种换刀方式,一种是刀具交换后当前刀套向上翻转90°回原位,等待下次选刀,称为普通换刀;另一种是换刀后刀套不回原位,当得到下一个选刀指令时根据不同的情况再决定是否回刀,这种换刀方式称为快速换刀。
快速换刀的主要优点在于,当加工程序在固定的两把刀具之间切换时,可以省去一个倒刀和回刀的时间,特别是在反复使用两把刀的时候,效果明显。
而且相对于整个加工过程,并不增加换刀时间。
因此,这种快速换刀使用比较广泛。
梯形图编写机械手臂换刀动作完全由电机驱动凸轮机构控制,并可以根据不同位置给出三个传感器位置信号。
编梯形图时,只需根据这三个传感器信号时序图控制电机启动和停止即可。
刀具数据存储和数据交换,通常使用数据表完成。
相应D地址号作为刀套号,D地址中的数据作为刀具号。
判断换刀时机的方式我看到了两种:一种是通过SUB 6 / ROT计算刀盘需要转动的步数和方向,然后刀盘每旋转一格计数器减1,直到待换刀套到达换刀位置即执行动作;另一种是只需通过SUB 6 / ROT计算刀盘的转动方向,然后刀盘每旋转一格比较一次换刀位置刀号和换刀代码,如一致则执行换刀动作。
主轴上松刀的时候同时要有一个吹气动作,其目的应该是清除刀具安装位置的杂质,须和松刀动作同时完成。
数据交换流程图如下:****************************************************************************PMC Type PMC-SA1/RA1Date 2005年4月20日 9:56:39****************************************************************************| F0003.3 R0400.0 |*----||---*---------------------------------------------------------()---* 自动方式| MMDI | AUTOMO || | || F0003.4 | |*----||---* || MRMT | || | || F0003.5 | |*----||---* || MMEM || || F0003.2 R0400.1 |*----||---*---------------------------------------------------------()---* 手动方式| MJ | HANDMO || | || F0003.1 | |*----||---* || MH || || R0020.3 R0030.7 |*----||---*---------------------------------------------------------()---*| M06 | || | || R0021.0 | |*----||---* || M19 || || R0021.0 G0070.4 G0070.5 R0020.2 F0001.1 G0070.6 |*----||---*--------*---|/|------|/|------|/|------|/|---------------()---* 换刀时主轴进入 | M19 | | SRVA SFRA M05 RST | 准停状态| | | || R0020.3 | | |*----||---* | || M06 | || | || G0070.6 | |*----||------------* || || || X0011.6 R0090.1 R0090.0 |*----||-------|/|---------------------------------------------------()---*| K_MAGK || || X0011.6 R0090.1 |*----||-------------------------------------------------------------()---*| K_MAGK || || R0090.0 R0090.2 R0090.2 |*----||-------|/|--*--------------------------------------------*---()---* 选择刀库方式 | MAGKEY | | MAGKEY || | | || R0090.0 R0090.2 | |Y0006.4 |*----|/|------||---* *---()---*| MAGKEY MK_LED || || X0007.5 R0090.2 Y0007.4 |*----||-------||----------------------------------------------------()---* 手动旋转LED | MAGHD MAGKEY MHDLED || || X0008.7 ACT .--------.----------------. R0232.0 |*----|/|-----------*SUB24 |0018 *----------------------()---* 延时计数| TL_CNT | | | || | | | || |TMRB | | || | |0000000008 | || | | | || | | | || | | | || .--------.----------------. || || || R0232.0 R0232.2 R0232.1 |*----||-------|/|---------------------------------------------------()---* TOOL COUNT PULSE | CNT_PL || || R0232.0 R0232.2 |*----||-------------------------------------------------------------()---*| || || R9091.1 BYT .--------.----------------. |*----|/|-----------*SUB23 |0024 *---------------------------* C0000=24(BCD码) | LOG1 | | | | 24把刀| | | | || R9091.1 ACT |NUME | | |*----||------------* |C0000 | || LOG1 | | | || | | | || | | | || .--------.----------------. || || || R9091.1 CNO .--------.----------------. R0232.3 |*----||---------------------*SUB5 |0001 *-------------()---* 刀库正/反计数器| LOG1 | | | || | | | || K0010.1 UPDOWN |CTR | | |*----||---------------------* | | || TCCWHD | | | || | | | || R9091.1 RST | | | |*----|/|--------------------* | | || LOG1 | | | || | | | || K0010.0 R0232.1 ACT | | | |*----||---*---||------------* | | || TCWHD | CNT_PL | | | || | | | | || K0010.1 | | | | |*----||---* .--------.----------------. || TCCWHD || || R9091.1 BYT .--------.----------------. |*----|/|-----------*SUB23 |0099 *---------------------------* D32=99| LOG1 | | | || | | | || R0100.0 ACT |NUME | | |*----||------------* |D0032 | || IN_PLS | | | || | | | || | | | || .--------.----------------. || || || F0007.3 R0400.0 A0000.7 K0010.0 K0010.1 A0001.2 R0232.4 |*----||-------||-------|/|------|/|------|/|------|/|---------------()---* T CODE ARRIVE| TF AUTOMO TCWHD TCCWHD TCD_AR || || R0232.4 ACT .--------.----------------. R0240.2 |*----||------------*SUB24 |0019 *----------------------()---*| TCD_AR | | | T_FINI || | | | || |TMRB | | || | |0000000200 | || | | | || | | | || | | | || .--------.----------------. || || || R9091.1 BYT .--------.----------------. R0233.3 |*----|/|-----------*SUB14 |F0026 *----------------------()---* BCD -> BIN| LOG1 | |T(BIN) | || | | | || R9091.1 CNV |DCNV | | |*----|/|-----------* |D0028 | || LOG1 | |T(BCD) | || | | | || F0001.1 RST | | | |*----||------------* | | || RST | | | || | | | || R0232.4 ACT | | | |*----||------------* | | || TCD_AR | | | || | | | || | | | || .--------.----------------. || || || R9091.1 BYT .--------.----------------. R0232.5 |*----|/|-----------*SUB17 |0024 *----------------------()---* T CODE NOT FOUND | LOG1 | | | NO_TCD | IN DATA TABLE| | | | || F0001.1 RST |DSCH | | | 检索刀套号*----||------------* |D0001 | | 并写入D30| RST | | | || | | | || R0232.4 ACT | | | |*----||------------* |D0028 | || TCD_AR | |T(BCD) | || | | | || | | | || | |D0030 | || | | | || | | | || | | | || .--------.----------------. || || || R9091.1 BYT .--------.----------------. R0233.4 |*----|/|-----------*SUB19 |0000 *----------------------()---* D30+1 -> D32| LOG1 | | | || | | | || F0001.1 RST |ADD | | |*----||------------* |D0030 | || RST | | | || | | | || R0232.4 ACT | | | |*----||------------* |0001 | || TCD_AR | | | || | | | || | | | || | |D0032 | || | | | || | | | || | | | || .--------.----------------. || || || R9091.1 BYT .--------.----------------. R0232.6 |*----|/|-----------*SUB16 |0001 *----------------------()---* T CODE = SP TOOL CODE | LOG1 | | | TCD=SP || | | | | 判断T代码待换刀具| R9091.1 ACT |COIN | | | 是否在主轴上*----||------------* |D0028 | || LOG1 | |T(BCD) | || | | | || | | | || | |D0000 | || | |T(SP) | || | | | || | | | || .--------.----------------. || || || R9091.1 BYT .--------.----------------. R0232.7 |*----|/|-----------*SUB16 |0001 *----------------------()---* TOOL ON POSITION| LOG1 | | | T_RDY || | | | | 判断刀盘上待换| R9091.1 ACT |COIN | | | 刀具是否到位*----||------------* |D0032 | || LOG1 | | | || | | | || | | | || | |C0002 | || | | | || | | | || | | | || .--------.----------------. || || || A0000.7 A0001.3 A0001.6 A0003.4 A0003.5 R0236.0 G0008.4 R0233.2 |*----|/|------|/|------|/|------|/|------|/|------|/|------||-------()---* MAG ROTATE ENABLE| *EMGNC MAG_EN || || R0232.4 R0232.5 R0232.6 R0233.2 F0001.1 R0232.7 R0233.0 |*----||---*---|/|------|/|------||-------|/|------|/|---------------()---* MAG ROTATION| TCD_AR | NO_TCD TCD=SP MAG_EN RST T_RDY MAG_RO || | || R0233.0 | |*----||---* || MAG_RO || || R9091.1 RNO .--------.----------------. R0233.1 |*----||------------*SUB6 |0024 *----------------------()---* 计算旋转方向| LOG1 | | | CW/CCW | =0 CW; =1 CCW| | | | || R9091.1 BYT |ROT | | | 计算旋转步数*----|/|-----------* |C0002 | | 并写入D34| LOG1 | | | || | | | | 本例通过比较刀具| R9091.1 DIR | | | | 位置决定是否换刀*----||------------* |D0032 | | 故计算旋转步数没| LOG1 | | | | 什么用| | | | || R9091.1 POS | | | |*----|/|-----------* |D0034 | || LOG1 | | | || | | | || R9091.1 INC | | | |*----||------------* | | || LOG1 | | | || | | | || R0233.0 ACT | | | |*----||------------* | | || MAG_RO | | | || | | | || | | | || .--------.----------------. || || || R0400.0 R0233.0 R0233.1 R0232.7 R0230.2 R0233.2 K0010.1 Y0002.2 |*----||---*---||-------|/|------|/|--*---||-------||-------|/|------()---* MAG CW ROTATE | AUTOMO | MAG_RO CW/CCW T_RDY | C_UPFB MAG_EN TCCWHD MA_CW || | | || Y0002.2 | | |*----||---* | || MA_CW | || | || R0400.1 R0090.2 X1002.0 X1002.1 | |*----||-------||---*---||-------|/|--* || HANDMO MAGKEY | | || | | || |X0007.5 F0072.1 | || *---||-------|/|--* || | MAGHD OUT1 | || | | || |Y0002.2 R0233.5 | || *---||-------|/|--* || MA_CW 120MS | || | || Y0002.2 X0008.7 | |*----||-------|/|--------------------* || MA_CW TL_CNT || || R0400.0 R0233.0 R0233.1 R0232.7 R0230.2 R0233.2 K0010.0 Y0002.3 |*----||---*---||-------||-------|/|--*---||-------||-------|/|------()---* MAG CCW ROTATE | AUTOMO | MAG_RO CW/CCW T_RDY | C_UPFB MAG_EN TCWHD MA_CCW || | | || Y0002.3 | | |*----||---* | || MA_CCW | || | || R0400.1 R0090.2 X1002.0 X1002.1 | |*----||-------||---*---|/|------||---* || HANDMO MAGKEY | | || | | || |F0072.0 F0072.1 | || *---|/|------||---* || | OUT0 OUT1 | || | | || |Y0002.3 R0233.5 | || *---||-------|/|--* || MA_CCW 120MS | || | || Y0002.3 X0008.7 | |*----||-------|/|--------------------* || MA_CCW TL_CNT || || Y0002.2 X0008.7 ACT .--------.----------------. R0233.5 |*----||---*---|/|-----------*SUB24 |0020 *-------------()---* DELAY 120MS| MA_CW | TL_CNT | | | 120MS || | | | | | 刀库每转一格| Y0002.3 | |TMRB | | | 延时120ms*----||---* | |0000000120 | || MA_CCW | | | || | | | || | | | || .--------.----------------. || || || Y0002.2 K0010.1 K0010.0 |*----||---------------------*---|/|---------------------------------()---* 正转保持| MA_CW | TCCWHD TCWHD || | || K0010.0 Y0002.3 X0008.7 | |*----||-------|/|------|/|--* || TCWHD MA_CCW TL_CNT || || Y0002.3 K0010.0 K0010.1 |*----||---------------------*---|/|---------------------------------()---* 反转保持| MA_CCW | TCWHD TCCWHD || | || K0010.1 Y0002.2 X0008.7 | |*----||-------|/|------|/|--* || TCCWHD MA_CW TL_CNT || || X0008.7 A0000.7 R0230.0 G0008.4 Y0002.2 Y0002.3 R0233.7 |*----||---*---|/|------||---*---||-------|/|------|/|---------------()---* up/down enable| TL_CNT | T_CLFB | *EMGNC MA_CW MA_CCW UPDWEN || | | || |R0234.1 | || *---||------------* || M6_RDY || || X0008.5 X0008.2 R0100.0 R0229.6 |*----||-------|/|--*---||-------------------------------------------()---* KEEP CUP UP PULSE | C_U_SE C_D_SE | IN_PLS KPCUP || | | 上电时保持当前状态1 | X0008.5 X0008.2 | |*----|/|------|/|--* || C_U_SE C_D_SE || || K0011.0 R0229.5 |*----||---*---------------------------------------------------------()---*| | K KEEP || | || K0011.1 | |*----||---* || | || | || K0011.2 | |*----||---* || | || | || K0011.3 | |*----||---* || | || | || K0011.4 | |*----||---* || | || | || K0011.5 | |*----||---* || || || R0400.1 X0007.5 R0090.2 R0233.7 G0008.4 Y0002.2 R0229.5 Y0002.4 |*----||---*---||---*---||---*---||---*---||---*---|/|--*---|/|--*---()---* 刀套抬起| HANDMO | MAGHD | MAGKEY | UPDWEN | *EMGNC | MA_CW | K KEEP | C_UP || | | | | | | | || |F0072.1 | |R0230.2 | |Y0002.3 | | || *---||---* *---||---* *---|/|--* | || | OUT1 | | C_UPFB | | MA_CCW | || | | | | | | || |X1002.0 | | | | | || *---||---* | | | | || | | | | | | || | | | | | | || |X1002.1 | | | | | || *---||---* | | | | || | | | | || | | | | || R0400.0 R0233.0 A0002.6 | | | | |*----||-------||-------|/|--* | | | || AUTOMO MAG_RO | | | || | | | || Y0002.4 R0230.2 | | | |*----||-------|/|--------------------* | | || C_UP C_UPFB | | || | | || R0229.6 Y0002.5 | | |*----||-------|/|-----------------------------* 上电时 | || KPCUP C_DOWN | || | || R0023.0 | |*----||---------------------------------------------------------* || M40 || || X0008.5 X0008.2 R0100.0 R0229.7 |*----|/|------||-------||-------------------------------------------()---* KEEP CUP DOWN PULSE | C_U_SE C_D_SE IN_PLS KPCDW | 上电时保持当前状态2 | || R0400.0 R9091.1 R0233.7 G0008.4 Y0002.2 R0232.7 R0023.0 Y0002.5 |*----||---*---|/|--*---||---*---||---*---|/|--*---||-------|/|------()---*| AUTOMO | LOG1 | UPDWEN | *EMGNC | MA_CW | T_RDY M40 C_DOWN || | | | | | || |R0234.1 | | |Y0002.3 | || *---||---* | *---|/|--* || M6_RDY | | MA_CCW || | | || R0229.5 | | |*----||---------------------* | || K KEEP | || | || R0229.7 Y0002.4 | |*----||-------|/|--------------------* 上电时 || KPCDW C_UP | || | || Y0002.5 R0230.3 | |*----||-------|/|--------------------* 上电时 || C_DOWN C_DWFB || || R0020.3 R0240.2 R0233.0 R0232.6 R0230.4 R0234.0 |*----||-------|/|------|/|------||-------||-------------------------()---*| M06 T_FINI MAG_RO TCD=SP ARHMFB M6_FIN || || R0020.3 R0240.2 R0233.0 R0232.7 R0232.6 F0001.1 G0008.4 A0003.1 |*----||-------|/|------|/|------|/|--*---|/|------|/|------||-------()---*| M06 T_FINI MAG_RO T_RDY | TCD=SP RST *EMGNC || | || A0003.1 | |*----||------------------------------* || || || R0020.3 R0240.2 R0233.0 R0232.7 F0094.2 F0001.1 G0008.4 A0003.2 |*----||-------|/|------|/|------||-------|/|--*---|/|------||-------()---*| M06 T_FINI MAG_RO T_RDY ZP3 | RST *EMGNC || | || A0003.2 | |*----||---------------------------------------* || || || R0020.3 R0232.6 R0232.7 R0230.4 A0003.1 A0003.2 R0234.1 |*----||-------|/|------||-------||-------|/|------|/|---------------()---*| M06 TCD=SP T_RDY ARHMFB M6_RDY || || R0234.1 F0094.2 R0230.3 R0235.7 G0008.4 R0234.2 |*----||---*---||-------||-------|/|------||-------------------------()---*| M6_RDY | ZP3 C_DWFB MAGFIN *EMGNC ARMSTR || | || R0234.2 | |*----||---* || ARMSTR || || F0072.7 R0229.5 F0003.1 R0090.2 G0008.4 R0236.0 |*----||-------||-------||-------||-------||-------------------------()---* 刀库复位| OUT7 K KEEP MH MAGKEY *EMGNC || || F0072.0 R0236.0 R0230.3 R0236.1 R0236.2 |*----||-------||-------||-------|/|---------------------------------()---*| OUT0 C_DWFB MAGPLS || || F0072.0 R0236.0 R0230.3 R0236.1 |*----||-------||-------||-------------------------------------------()---*| OUT0 C_DWFB || || R0234.2 R0230.4 R0230.5 R0232.6 R0230.0 A0001.5 R0234.3 |*----||---*---||-------|/|--*--------*---|/|------||-------|/|------()---* 手臂旋转60° | ARMSTR | ARHMFB ARM_MI | | TCD=SP T_CLFB STP1 || | | | || |R0234.3 R0230.5 | | || *---||-------|/|--* | || STP1 ARM_MI | || | || R0236.0 R0236.2 R0230.5 K0011.0 | |*----||---*---||-------|/|------||---* || | MAGPLS ARM_MI | || | | || |R0234.3 R0230.5 | || *---||-------|/|-----------* || STP1 ARM_MI || || R0234.3 F0001.1 K0011.0 |*----||------------*---|/|------------------------------------------()---*| STP1 | RST || | || K0011.0 K0011.1 | |*----||-------|/|--* || || || R0234.2 K0011.0 R0230.0 R0230.5 R0234.3 Y0002.6 R0234.4 |*----||---*---||-------||---*---||------------*---|/|------|/|------()---* 主轴松刀| ARMSTR | T_CLFB | ARM_MI | STP1 ARM_MT STP2 || | | | || |R0234.4 R0230.1 | | || *---||-------|/|--* | || STP2 T_UCFB | || | || R0236.0 R0236.2 R0230.1 K0011.1 | |*----||---*---||-------|/|--*---||------------* 复位 || | MAGPLS T_UCFB | | || | | | || | |K0011.0 R0230.0 | || | *---||-------||---* || | T_CLFB | || | | || |R0234.4 R0230.1 | || *---||-------|/|--------------------* || STP2 T_UCFB || || R0234.4 F0001.1 K0011.1 |*----||------------*---|/|------------------------------------------()---*| STP2 | RST || | || K0011.1 K0011.2 | |*----||-------|/|--* || || || R0234.2 R0234.4 R0230.1 A0001.5 R0234.5 |*----||-------|/|------||-------|/|---------------------------------()---*| ARMSTR STP2 T_UCFB STP3EN || || R0234.5 K0011.1 R0230.5 R0234.4 R0234.6 |*----||---*---||------------*---||---*---|/|------------------------()---* 手臂旋转180° | STP3EN | | ARM_MI | STP2 STP3 || | | | || |R0234.6 R0234.7 | | || *---||-------|/|--* | || | STP3 TIM22 | || | | || |R0234.6 R0230.5 | || *---||-------|/|-----------* || STP3 ARM_MI | || | || R0236.0 R0236.2 K0011.2 R0230.1 | |*----||---*---||---*---||---*---||---* || | MAGPLS | | T_UCFB || | | | || | |K0011.1 | || | *---||---* || | | || | | || |R0234.6 R0234.7 | || *---||-------|/|--* || | STP3 TIM22 | || | | || |R0234.6 R0230.5 | || *---||-------|/|--* || STP3 ARM_MI || || R0234.6 R0230.5 ACT .--------.----------------. R0234.7 |*----||-------|/|-----------*SUB24 |0021 *-------------()---* 延时22ms| STP3 ARM_MI | | | TIM22 || | | | || |TMRB | | || | |0000000022 | || | | | || | | | || | | | || .--------.----------------. || || || STP3 | RST || | || K0011.2 K0011.3 | |*----||-------|/|--* || || || R0236.0 R0234.4 R0234.6 K0011.2 R0230.1 R0230.5 R0237.1 R0237.0 |*----||-------|/|------|/|------||-------||-------||-------|/|------()---* 复位脉冲,打断step3 | STP2 STP3 T_UCFB ARM_MI || || R0236.0 R0234.4 R0234.6 K0011.2 R0230.1 R0230.5 R0237.1 |*----||-------|/|------|/|------||-------||-------||----------------()---*| STP2 STP3 T_UCFB ARM_MI || || R0234.2 K0011.2 R0230.1 R0230.5 R0234.6 Y0002.6 R0235.0 |*----||---*---||-------||---*--------*---||-------|/|------|/|------()---* 刀具夹紧| ARMSTR | T_UCFB | | ARM_MI STP3 ARM_MT STP4 || | | | || |R0235.0 R0230.0 | | || *---||-------|/|--* | || STP4 T_CLFB | || | || R0236.0 R0236.2 R0230.1 K0011.3 | |*----||---*---||-------||---*---||---* || | MAGPLS T_UCFB | | || | | | || | |K0011.2 | || | *---||---* || | | || | | || |R0235.0 R0230.0 | || *---||-------|/|-----------* || STP4 T_CLFB || || R0235.0 F0001.1 K0011.3 |*----||---*--------*---|/|------------------------------------------()---*| STP4 | | RST || | | || R0237.0 | | |*----||---* | || | || | || K0011.3 K0011.4 | |*----||-------|/|--* || || || R0234.2 K0011.3 R0230.5 R0230.0 R0235.0 Y0002.6 R0235.1 |*----||---*---||------------*---||-------||-------|/|------|/|------()---* 数据表数据更新| ARMSTR | | ARM_MI T_CLFB STP4 ARM_MT STP5 || | | || |R0235.1 R0232.6 | || *---||-------|/|--* || STP5 TCD=SP | || | || R0236.0 R0236.2 K0011.3 | |*----||---*---||-------||---* || | MAGPLS | || | | || |R0235.1 R0232.6 | || *---||-------|/|--* || STP5 TCD=SP || || STP5 | RST || | || K0011.4 K0011.5 | |*----||-------|/|--* || || || R0235.1 R0235.3 R0235.2 |*----||-------|/|---------------------------------------------------()---* 数据更新脉冲| STP5 DA_PLS || || R0235.1 R0235.3 |*----||-------------------------------------------------------------()---*| STP5 || || R9091.1 BYT .--------.----------------. R0229.4 |*----|/|--------------------*SUB20 |0000 *-------------()---*| LOG1 | | | || | | | || F0001.1 RST |SUB | | |*----||---------------------* |C0002 | || RST | | | || | | | || K0011.4 R0235.2 ACT | | | |*----||-------||------------* |0001 | || DA_PLS | | | || | | | || | | | || | |D0040 | || | | | || | | | || | | | || .--------.----------------. || || || R9091.1 BYT .--------.----------------. R0235.4 |*----|/|--------------------*SUB18 |0024 *-------------()---* DATA TABLE ERROR | LOG1 | | | || | | | || R9091.1 RW |XMOV | | |*----||---------------------* |D0001 | || LOG1 | | | || | | | || R9091.1 RST | | | |*----|/|--------------------* |D0000 | || LOG1 | |T(SP) | || | | | || K0011.4 R0235.2 ACT | | | |*----||-------||------------* |D0040 | || DA_PLS | | | || | | | || | | | || .--------.----------------. || || || K0011.4 R0235.2 ACT .--------.----------------. |*----||-------||------------*SUB8 |1111 *------------------*| DA_PLS | | | || | | | || |MOVE | | || | |1111 | || | | | || | | | || | | | || | |D0028 | || | |T(BCD) | || | | | || | | | || | |D0000 | || | |T(SP) | || | | | || | | | || .--------.----------------. || || || R0236.0 R0235.1 K0011.4 R0232.6 R0237.3 R0237.2 |*----||-------||-------||-------||-------|/|------------------------()---* CUT K-STEP5| STP5 TCD=SP | 复位打断step5 | || R0236.0 R0235.1 K0011.4 R0232.6 R0237.3 |*----||-------||-------||-------||----------------------------------()---*| STP5 TCD=SP || || R0234.2 K0011.4 R0230.5 R0232.6 R0230.0 R0235.1 R0235.5 |*----||---*---||---*---||---*---||-------||-------|/|---------------()---* STEP6, ARM HOME | ARMSTR | | ARM_MI | TCD=SP T_CLFB STP5 || | | | | 机械手臂回原位 | |K0011.5 | | || *---||---* | || | | || | | || |R0235.5 R0230.4 | || *---||-------|/|--* || ARHMFB | || | || R0236.0 R0236.2 K0011.5 | |*----||---*---||---*---||---* || | MAGPLS | | || | | | || | |K0011.4 | || | *---||---* || | | || | | || |R0235.5 R0230.4 | || *---||-------|/|--* || ARHMFB || || R0235.5 F0001.1 K0011.5 |*----||---*--------*---|/|------------------------------------------()---*| | | RST || | | || R0237.2 | | |*----||---* | || | || | || K0011.5 R0230.4 | |*----||-------|/|--* || ARHMFB || || R0020.3 R0232.6 R0230.4 K0011.0 K0011.5 R0235.7 |*----||-------||-------||-------|/|------|/|------------------------()---*| M06 TCD=SP ARHMFB MAGFIN || || X0009.3 R0401.2 R0401.1 |*----||-------|/|---------------------------------------------------()---* 主轴手动松拉刀 | UNCLHD || || X0009.3 R0401.2 |*----||-------------------------------------------------------------()---*| UNCLHD || || R0401.1 R0401.0 R0401.0 |*----||-------|/|--*------------------------------------------------()---*| | || | || R0401.1 R0401.0 | |*----|/|------||---* || || || R0400.1 R0230.4 R0401.0 A0001.3 G0008.4 Y0002.0 |*----||-------||-------||---*--------*---|/|------||------------*---()---* 主轴刀具松开 | HANDMO ARHMFB | | *EMGNC | SP_UNC || | | | || R0234.2 K0011.0 K0011.1 | | |Y0002.1 |*----||---*---|/|------||---* | *---()---* 主轴吹气| ARMSTR | | | SP_AIR || | | | || |K0011.1 K0011.2 | | || *---|/|------||---* | || | | | || | | | || |Y0002.0 K0011.3 | | || *---||-------|/|--* | || SP_UNC | || | || R0236.0 R0236.2 K0011.0 K0011.1 | |*----||---*---||---*---|/|------||---* || | MAGPLS | | || | | | || | |K0011.1 K0011.2 | || | *---|/|------||---* || | | || | | || |Y0002.0 K0011.3 | || *---||-------|/|-----------* || SP_UNC || || A0001.5 A0003.6 G0008.4 R0235.6 |*----|/|------|/|------||-------------------------------------------()---*| *EMGNC ARMERR || || R0234.2 R0234.3 R0230.0 R0230.5 K0011.1 R0235.6 Y0002.6 |*----||---*---||-------||-------|/|------|/|--*---||---*------------()---* ARM MOTOR RUN | ARMSTR | STP1 T_CLFB ARM_MI | ARMERR | ARM_MT || | | | | 机械手臂电机 | R0236.0 |R0234.6 R0230.1 K0011.1 K0011.3 | | |*----||---*---||-------||-------|/|------|/|--* | || | STP3 T_UCFB | | || | | | || |R0235.5 R0230.0 K0011.4 R0230.4 | | || *---||-------||-------|/|------|/|--* | || T_CLFB ARHMFB | || | || X0002.4 K0002.0 | |*----||-------||---------------------------------------* 手动 || ARM_HD || || X0008.1 X0008.3 R0230.0 |*----|/|------||----------------------------------------------------()---*| UNCLAM CLAM T_CLFB || || X0008.1 X0008.3 ACT .--------.----------------. R0230.1 |*----||-------|/|-----------*SUB24 |0009 *-------------()---*| UNCLAM CLAM | | | T_UCFB || | | | || |TMRB | | || | |0000000100 | || | | | || | | | || | | | || .--------.----------------. || || || X0008.5 X0008.2 ACT .--------.----------------. R0230.2 |*----||-------|/|-----------*SUB24 |0015 *-------------()---* 刀套上位反馈| C_U_SE C_D_SE | | | C_UPFB || | | | || |TMRB | | || | |0000000200 | || | | | || | | | || | | | || .--------.----------------. || || || X0008.5 X0008.2 ACT .--------.----------------. R0230.3 |*----|/|------||------------*SUB24 |0016 *-------------()---* 刀套下位反馈| C_U_SE C_D_SE | | | C_DWFB || | | | || |TMRB | | || | |0000000200 | || | | | || | | | || | | | || .--------.----------------. || || || X0003.0 X0003.1 X0009.4 R0230.4 |*----|/|------||-------|/|------------------------------------------()---* 机械手臂原点反馈 | ATC_HO ARHMFB || || X0003.0 X0003.1 X0009.4 R0230.5 |*----||-------|/|------|/|------------------------------------------()---*| ATC_HO ARM_MI || || F0009.7 G0046.1 F0007.0 R0240.0 |*----||------------*---||---*---||---*------------------------------()---*| DM00 | SBK | MF | || | | | || F0009.6 R0001.0 | | | |*----||-------||---* | | || DM01 | | || | | || F0009.6 R0001.0 | | |*----||-------|/|-----------* | || DM01 | | || | | || R0020.0 G0070.5 F0045.3 | | |*----||-------||-------||---* | || M03 SFRA | | || | | || R0020.1 G0070.4 F0045.3 | | |*----||-------||-------||---* | || M04 SRVA | | || | | || R0020.2 G0070.4 G0070.5 | | |*----||-------|/|------|/|--* | || M05 SRVA SFRA | | || | | || R0021.0 F0045.7 | | |*----||-------||------------* | || M19 ORARA | | || | | || R0022.0 F0076.3 | | | *----||-------||------------* | | | M29 RTAP | | | | | | | | R0020.3 R0234.0 | | | *----||-------||------------* | | | M06 M6_FIN | | | | | | | | R0023.0 Y0002.4 Y0002.5 | | | *----||-------||-------|/|--* | | | M40 C_UP C_DOWN | | | | | | R0240.0 F0007.0 F0001.1 | | *----||-------|/|------|/|-----------* | | MF RST | | | | R0020.3 R0232.6 R0234.2 R0241.3 | *----||---*---||-------|/|--*---------------------------------------()---* | M06 | TCD=SP ARMSTR | | | | | | | |R0233.0 R0232.7 | | | *---|/|------|/|--* | | | MAG_RO T_RDY | | | | | | | |F0001.1 | | | *---||------------* | | RST | | | | F0007.0 F0007.0 F0007.2 F0007.3 G0004.3 | *----||---*---|/|--*---|/|--*---|/|--*------------------------------()---* | MF | MF | SF | TF | FIN | | | | | | | | F0007.2 |R0240.0 |R0240.1 |R0240.2 | | *----||---*---||---*---||---*---||---* | | SF | | T_FINI | | | | | | F0007.3 |R0241.3 | | *----||---*---||---* | | TF | | | | .--------. | *---------*SUB2 *-----------------------------------------------------* | | | | | | | | | |END2 | | | .--------. | | | | |。