基于ADAMS的制动抖动现象仿真分析_高晓杰
基于ADAMS集装箱起重机防摇摆柔性系统仿真分析

吊具及 集装 箱 。结合 防摇性 能 仿真 分析 的 目的对模 型 进 行 了合理 的简 化 , 将具 有 相 同运 动 状 态 的所 有 模 型 简 化 为一个 整体 , 如 上 部 的小 车 钢 结 构 及其 上 所 附带 的 电机 、 减速机 、 卷 筒 以 及 所 有 定 滑 轮 等 建 为 一 个 整 体. 下部 的吊具 、 旋转 架 和集装 箱等 建为 一个整 体 。小 车 上 的定滑 轮 与滚筒 间钢 丝 绳 一 直处 于张 紧 状 态 , 下 端 集装 箱摆 动对 其影 响较 小 , 因此 分 析将 不 考 虑 定 滑 轮 与卷 筒 间钢丝 绳 。
一
柱 体 与滑轮 间 的接触 增 多 , 在 提 高 计算 精 度 的同 时会 降低仿 真速 度 , 计 算耗 时量 较大 。
该 门式 起重 机 防 摇 系 统 主要 由 8根钢 丝 绳 、 8个 动滑轮 、 1 6个 定滑轮 和 1个 卷筒 组 成 。为保 证 钢 丝绳 缠 绕部 分 与滑轮 相切 , 依 据 滑 轮 内槽 半 径 计 算 离 散 的 单 个小 圆柱 体 长 度 为 1 7 7 mm。防摇 摆计 算 高 度 ( 即
图 1 小 车整 体 几 何 模 型
图 2 吊具 、 转 向 架及 集 装 箱 整 体 几 何 模 型
统 的虚 拟样 机 , 系统 地研 究 了小 车 由额定 速 度 到静 止 过 程 中 吊具 及集 装箱 的动 态特性 和摆 动 幅度 。
1 虚 拟样 机建模 虚 拟样 机 主要 包 括 滑 动 小 车 、 8根 钢 丝 绳 、 滑轮、
1 . 1 创 建 几 何 模 型 在 N X 8 . 0中建 立 起 重 机 小 车 机 构 、 吊具 、 转向
1 . 2 创 建滑轮 绳 索机 构动 力学模 型 滑轮绳 索机 构是 防摇 系 统 的 重要 组 成 部 分 , 绳 索 的变形 及 振 动 性 能 直 接 影 响 着 整 个 系 统 的性 能 和运 作 。根 据不 同系 统 的需求 , 在 AD AMS软 件 中利 用 不 同的方 法进 行柔 索建模 , 以最快捷 、 最 省时 的方 式达 到 仿 真要 求 与研究 目标0 卜 。但 不 同绳 索建 模 方法 在 建 模难 易程度 、 仿 真 时 间 及 计 算 精 度 上 存 在 一 定 的差 异1 . { J , 本 文将 采用 衬套 连接 的方式 建立 柔索 模 型 , 其 基 本 思想 就是 将钢 丝绳 离 散 成 许 多小 圆柱 刚 性体 , 在 圆 柱刚性 体之 间通 过 轴 套 力 ( B u s h i n g ) 连 接 来 近 似模 拟 钢丝绳 。当单个 圆柱 体 相 对 整个 钢 丝 绳 长 度 很小 时 . 钢丝绳 就可 以视 作 是连 续 的 , 采 用 这种 方 法 可 以 比较 真实地 反 映钢丝 绳在 滑 轮 上 的缠 绕 , 以 及钢 丝 绳 的拉 伸 弯 曲等力 学性 能 , 仿 真精 度较 高 , 是 目前应 用 较多 的 种建 模方 法 ] , 但 是 当离散 刚性 圆柱体 很 多 时 , 圆
基于ADAMS的柔性传动轴系扭转振动分析

=
( 1)
确定发动机谐次 r 的范围采用以下公式 60 ωi 60 ωi ・ ≤r ≤ π・ π 2 nmax 2 nmin
( 2)
式中 , nmax 、 nmin分别为发动机最高 、 最低工作转速 。 通过式 ( 1) 、 式 ( 2) 可以看出 , 在动力传动轴系转动 过程中 , 当发动机升速或者降速时 , 轴系将会遇到多个 临界转速 , 即会发生多次共振 。但在升速或者降速过 程中短时间通过临界转速不会建立起共振工况 。因此 需要关注的是在发动机工作转速范围内出现的临界转 速 , 尤其是发动机激振力矩幅值较大的谐次对应的临
2. 2 仿真测试
由于机车传动轴的扭转振动在运转过程中属于强 迫振动 , 而且发动机内部激振很复杂 , 所以在仿真过程 中计算机不可能模拟发动机的激振过程 。本文在仿真 过程中采用的测试方法为给系统一单位力 δ, 然后测 试系统的自由扭转振动情况[ 7 ] 。通过仿真软件对系统
为了准确反映传动轴系各个部件的相互关系 , 根 据零件的二维图纸和技术参数 , 将它们的实际运动关 系简化成 ADAMS 中的理想约束 , 组装成一个完整的轴 系 。传动系统模型总成如图 4 所示 。
第 31 卷 第 6 期 基于 ADAMS 的柔性传动轴系扭转振动分析 79
①假设传动系统中各构件之间的装配误差为零 , 即忽略各构件之间的装配误差 。 ②假设传动系统各构件之间的摩擦力为零 , 即忽 略各构件之间的摩擦力 。 ③假设所有构件均为匀质构件 , 构件的轴心偏心 距为零 , 即忽略构件由于偏心引起的横向振动 。 ④假设液力变矩器端的阻尼为零 , 弹簧的阻尼为 零。 ⑤假设振源只有发动机 , 即忽略整车其余部分传 来的振动 。 1. 2. 3 建立构件柔性体模型 要在多体动力学分析中建立模型的柔性体 , 则必 须先对各个构件进行有限元分析 , 得到其各阶振型和 固有频率 ,然后利用模态中性文件 (MNF) ,导入多体系 统中 , 实现构件的柔性化 。本文采用 ADAMS/ Flex 模 块的构件网格模式 ( Geometry) ,首先定义好柔性体的附 着点 ,即柔性件与其它构件的连接点 。定义好附着点 后 ,需要在附着点的附近的网格结点上选取适当数量 结点作为力的作用点 , 作用点的数量和位置根据模型 精度 的 需 要 来 选 取 。最 后 , 将 选 取 的 结 点 转 换 成 ADAMS 的标识 ID , 就可以生成模态中性文件 。图 1 、 图 2、 图 3 所示为飞轮 、 前联轴节 、 齿轮轴有限元模型 , 表 1 为其构件的前 6 阶模态对应的固有频率 。
基于ADAMS振动仿真的动传系统振动问题整改

基于ADAMS振动仿真的动传系统振动问题整改摘要:某牵引车在重载10Km/h左右车速爬坡时出现变速箱抖动大问题,需要整改。
在ADAMS中建立仿真模型,复现了问题,并确定了整改目标。
通过仿真对比分析,确定最佳措施,实车整改验证显示整改措施有效,问题得以解决。
该案例是运用ADAMS仿真分析技术成功解决了该振动问题。
关键词:动力传动系统;ADAMS;振动前言*某牵引车在重载以10km/h左右车速爬坡时出现变速箱振动大的问题。
实车现场测试结果如下图1所示(变速箱上振动加速度,单位:m/s²,下同):图1故障工况测试结果结果显示故障工况下Z向的振动加速度有明显峰值,且远大于X、Y向振动峰值;相同车速下平路工况进行测试,结果显示振动峰值仅为爬坡时峰值的1/5~1/6。
1 理论分析此车型的传动轴采用不等速万向节连接,传动轴转动时会产生2阶振动,2阶振动大小跟传动轴夹角及传递的扭矩大小有关[2],在固有模态分析的基础上,进行激励频域响应分析,提取变速箱的振动各方向响应。
频率响应分析结果如下图2所示。
图2系统振动频域响应分析结果上图显示变速箱的z向振动在7.8Hz处出现了大的峰值,且Z向的响应远大于X、Y向响应;与实际测试结果(见图1)也一致。
采用如下计算公式可以计算出1阶频率。
式中,n传动轴理论平均转速;R驱动轮滚动半径 0.496 m;V行车速度10Km/h;i是驱动桥总传动比:4.11。
2阶为一阶频率的2倍:约为7.34Hz,此频率与测试出现的振动频率7.5Hz非常接近。
经计算在相同车速下,爬坡时传动轴输出扭矩是平路工况11倍左右,因此会导致爬坡时变速箱振动加速度明显加大。
同时由于在此频率下出现了振动峰值,判断动力传动的悬置系统某一阶固有频率可能接近于此7.5Hz。
2 系统固有模态仿真分析在ADAMS中建立如下的振动仿真分析模型如图3所示。
图3动力传动系统振动仿真分析模型如上图所示,在ADAMS中建仿真分析模型已经实际的动力传动及模型参数(发动机、变速箱、传动轴质量及惯性参数和悬置参数,及传动轴夹角)。
基于ADAMS的汽车制动性能的仿真研究
基于ADAMS 的汽车制动性能的仿真研究罗文水,谷正气,海贵春(湖南大学汽车车身先进设计制造国家重点实验室,湖南长沙410082)Simulation Research on Braking Stability of Vehicle on ADAMSL U O Wen 2shui ,GU Zheng 2qi ,HAI G ui 2chun(State Key Laboratory of Advanced Design and Manufacture for Vehicle Body ,Hunan University ,Changsha 410082,China ) 摘要:在CA TIA 数模的基础上,应用机械系统分析软件ADAMS ,在A/CAR 模块里建立了整车动力学仿真模型,并根据标准要求的实车试验方法设置了仿真条件,以不同的制动强度进行了直线制动和转弯制动仿真试验,对该车的制动性能进行了预测和评价,为该车的制动性能分析提供了参考.关键词:ADAMS ;制动性能;仿真;分析中图分类号:T H135文献标识码:A文章编号:100122257(2007)0420017204收稿日期:2006209225Abstract :A f ull vehicle multi 2body model was established in ADAMS/CA R by using t he mechan 2ical system simulation software ADAMS.And sim 2ulation conditions basing on t he vehicle test ways of standard request was set up.Then t he simula 2tion of braking in line and t he simulation of bra 2king in t urn were carried t hrough.The braking quality of t he vehicle can be estimated and forecas 2ted well t hrough t he result s of simulating analysis ,and it provided some reference to t he analysis of vehicle ’s braking stability.K ey w ords :ADAMS ;braking stability ;simula 2tion ;analysis0 引言汽车的制动性是汽车的主要性能之一,它直接关系到交通安全,对车辆的操纵控制有重要影响,而制动稳定性实车试验十分危险,所以对制动稳定性的计算机仿真研究尤其关注,已成为车辆制动稳定性理论研究与样车性能预测的重要手段[1].制动稳定性本身是一个十分复杂的问题,较为简单的模型只能用于理论的定性分析,很难指导具体的产品设计与开发,产品的设计与开发需要更加精确的模型,适合采用虚拟样机的仿真试验进行研究.笔者在某跑车的设计过程中,运用虚拟样机分析软件ADAMS 中的A/CA R 模块,针对该跑车的结构特点,建立了整车动力学模型,对其制动性能进行了仿真分析[2].1 整车模型的建立1.1 前悬架系统该车的前悬架为双横臂独立悬架,简化后的前悬架系统模型由上横臂、下横臂、立柱、动力输出轴、驱动轴、前横向稳定杆、连杆、转向横拉杆、减震器支座、轮心轴、前副车架以及减震器的上、下端组成.减震器上端与车身由弹性衬套(不考虑弹性衬套时为万向节铰链)相连,减震器的上、下端由圆柱副和弹簧、阻尼器力元相连;上横臂与车身由2个弹性衬套(不考虑弹性衬套时为转动铰链)相连,上横臂与立柱由球铰相连;连杆和减震器支座由球铰相连;转向横拉杆与转向齿条由恒速副相连,转向横拉杆与立柱由球铰相连;轮心轴与立柱由转动铰链相连;下横臂与立柱由球铰相连;轮心轴与驱动轴由恒速副相连;驱动轴和发动机动力输出轴由恒速副相连;下横臂与前副车架由2个弹性衬套(不考虑弹性衬套时为转动铰链)相连;前副车架与车身由6个弹性衬套(不考虑弹性衬套时为固定铰链)相连;动力输出轴与驱动轴由恒速副相连;减震器支座与下横臂由弹性衬套(不考虑弹性衬套时为万向节铰链)相连,减震器支座与减震器下端由固定副相连.前横向稳定杆分成左、右对称的2个部分,2部分之间由1个旋转副和1个扭转弹簧2阻尼器相连,以该扭转弹簧2阻尼器的扭转刚度和阻尼来模拟实际横向稳定杆的扭转刚度和阻尼.横向稳定杆与连杆由恒速副相连,横向稳定杆与前副车架由2个弹性衬套相连,如图1所示.图1 前悬架系统1.2 后悬架系统该车的后悬架系统为多连杆独立悬架,简化后的后悬架模型由上摆臂、下摆臂、立柱、纵向推力杆、轮心轴、后横向稳定杆、连杆、后副车架、稳定杆以及减震器的上、下端组成,如图2所示.图2 后悬架系统上摆臂与副车架由弹性衬套(不考虑弹性衬套时为转动铰链)相连,上摆臂与立柱由弹性衬套(不考虑弹性衬套时为球铰链)相连;下摆臂与副车架由弹性衬套(不考虑弹性衬套时为转动铰链)相连,下摆臂与立柱由弹性衬套(不考虑弹性衬套时为球铰链)相连,下摆臂与车身由弹簧相连;稳定杆与副车架由弹性衬套(不考虑弹性衬套时为球铰链)相连,稳定杆与立柱由弹性衬套(不考虑弹性衬套时为球铰链)相连;纵向推力杆与车身由弹性衬套(不考虑弹性衬套时为万向节铰链)相连,纵向推力杆与立柱由固定铰链相连;减震器下端与立柱由弹性衬套(不考虑弹性衬套时为万向节铰链)相连,减震器上端与车身由弹性衬套(不考虑弹性衬套时为万向节铰链)相连,减震器的上、下端由圆柱副和阻尼器力元相连;轮心轴与立柱由转动铰链相连;后副车架与车身由4个弹性衬套(不考虑弹性衬套时为固定铰链)相连.后横向稳定杆分成左、右对称的2个部分,2部分之间由1个旋转副和1个扭转弹簧2阻尼器相连,以该扭转弹簧2阻尼器的扭转刚度和阻尼来模拟实际横向稳定杆的扭转刚度和阻尼.横向稳定杆与连杆由球铰相连,连杆与立柱由球铰相连,横向稳定杆与后副车架由2个弹性衬套相连.1.3 转向系统该车的转向系统是一个齿轮2齿条式液压助力转向系统,简化后的转向系统由方向盘、转向轴、转向传动轴、转向输出轴、转向齿轮、转向齿条以及转向齿条套组成.当转向齿轮转过一个角度时,液压动力活塞上会产生压强差,从而产生帮助转向的助力.该液压系统输出的动力是通过编辑特性文件来实现的.方向盘与转向轴间为旋转副,转向轴与车身间为旋转副,这2个旋转副之间为复合铰链;转向传动轴与转向轴之间为万向节铰链,转向输出轴与转向传动轴之间为万向节铰链;转向输出轴与转向齿条套间为旋转副,转向齿轮与转向齿条套间为旋转副,这2个旋转副之间为复合铰链;转向齿条与转向齿条套间为滑动副,该约束副和转向齿轮与转向齿条套间为旋转副之间为复合铰链;转向齿轮与转向输出轴由弹性衬套相连,转向齿条套与车身之间由2个衬套(不考虑弹性衬套时为固定铰链)相连;转向齿条与转向横拉杆之间为球副.1.4 发动机系统由于发动机模块仅用于控制车速,这里采用了ADAMS/CA R 数据库中内置的发动机模块,动力传递系统进行相应简化,只考虑传动半轴以后的动力传递,即驱动力矩直接加在等速万向节处.而发动机简化成一个具有相应的质量特征参数的六自由度刚体,并通过4个非线性橡胶衬套分别连接到车身和副车架[3].1.5 车身系统车身简化成一刚体,其质量参数为簧载部分的质量,其转动惯量通过如下公式估算得到[4]:I y =m 1a 2+m 2b 2(1)I z ≈I y(2)I x ≈2(BL)I y(3)其中,L 为汽车外形总长度;B 为汽车的车辙宽度,取前后轴的最大轮距;a ,b 分别为汽车质心至前、后轴的距离;m 1,m 2分别为前、后轴上的轴载质量.1.6 轮胎系统ADAMS 软件提供了4种用于动力学仿真计算的轮胎模型,即默认的Fiala 模型、UA 模型、Smit h 2ers 模型和DEL ET 模型,此外还可由用户自定义模型.UA 模型是由Arizona 大学的Nikravesh 和G im 等人研制开发的,其特点是各方向的力和力矩由耦合的侧偏角、滑移率、外倾角及垂直方向变形等参数形式表达,因而准确、全面,轮胎建模时只需输入相应的参数即可.该整车模型中采用的是UA 轮胎模型[5].1.7 制动系统该车前、后轮制动器都是盘式制动器,在这将它简化成制动钳和制动盘2部分,其中制动钳和悬架的立柱固定连接,制动盘和轮胎固定连接.制动系统产生的制动力矩由如下公式计算得到:T =2A P μR (4)P =F Dηλ(5)其中,A 为制动面积;P 为制动压强;μ为摩擦系数;R 为有效制动半径;F D 为输入的踏板力;η为制动力分配系数;λ为踏板力到制动压强的转换系数.整车的各个子系统建立后,对其进行装配,即可完成整车模型的建立,如图3所示.图3 整车模型整车建模时,根据实车轮胎、弹簧、减震器和衬套的试验参数和国家标准规定试验路面的特性参数,编制了ADAMS/CAR 中相应的轮胎特性、变刚度弹簧力2位移曲线、减震器速度2力特性曲线、衬套力(力矩)2变形曲线和仿真路面特性文件.2 制动性能的评价标准及仿真条件的设置 制动稳定性的仿真试验研究方法,主要包括直线制动仿真试验和转弯制动仿真试验[6].2.1 直线制动仿真试验试验方法:在进行直线制动时,脱开发动机制动,制动初速度为80km/h ;从减速度1.5m/s 2起,以级差1±0.2m/s 2的间距逐次做制动试验,直到测出汽车的极限制动性能为止.绘制“制动距离2踏板力"关系曲线图.MFDD =v 2b -v 2c25.92(S c -S b )(6)其中,v 为试验车制动初速度;v b 为0.8v 试验车速;v c 为0.1v 试验车速;S b 为试验车速从v 到v b 行驶的距离;S c 为试验车速从v 到v c 行驶的距离.评价标准:G B1267621999.标准要求:制动距离S max =50.7m ,充分发出的平均减速度M FDD min =5.8m/s 2,最大控制力F max =500N ,不偏出3.7m 的通道.仿真条件:踏板力以阶跃的形式输入,输入的踏板力从30N 起,以级差30N 的间距逐次做制动仿真分析,直到前轮达到抱死状态为止;汽车先以80km/h 的车速匀速行驶,第1s 开始制动.路面的峰值摩擦系数为0.85,滑动摩擦系数为0.68.2.2 转弯制动仿真试验试验方法:车速以约40km/h 初始车速,在半径为42m 的圆周上稳态回转,这时车辆获得0.3g 左右的侧向加速度,然后保持转向盘不动,踏下离合器后迅速制动,测得车辆制动过程的运动参数变化过程.评价标准:目前主要参考ISO/TC22CS9标准.仿真条件:汽车先以40km/h 的车速匀速直线行驶50m ,然后给一个转向盘角阶跃输入,并保持车速不变,一段时间后汽车在半径为42m 的弯道上处于稳态回转状态,保持方向盘转角不变,第40s 时开始制动;以阶跃的形式施加踏板力,分别对不同的踏板力进行仿真计算,先施加30N 的踏板力,然后以级差30N 逐次增大,直至前轮抱死为止,得到不同制动强度下汽车响应的重要参数仿真结果.路面的峰值摩擦系数为0.85,滑动摩擦系数为0.68.3 仿真结果及评价3.1 直线制动仿真结果当踏板力从30N 开始,以级差30N 的间距逐次做制动仿真分析,可拟合出制动距离2踏板力关系曲线(见图4).图4 制动距离2踏板力曲线从图4可以看出,当踏板力为148N 时,该车的制动距离即满足了国标“最大制动距离为50.7m"的要求;当踏板力等于209N 时,制动距离达到最小值38.7m.汽车在脱开发动机直线制动时,产生了较小的侧偏,当踏板力较小时,左偏的量较大,并有随着踏板力的增大而减小的趋势.综上所述,可知该车的直线制动性能是符合国标要求的.3.2 转弯制动仿真结果通过对该车转变制动性能的仿真分析,由图5和图6可知:当踏板力小于205N ,前轮未发生抱死时,该车在转弯制动时具有少量的过度转向量.这是因为:汽车在正常圆周行驶情况下,后轮具有不足图5 横摆角速度响应曲线图6 侧向加速度响应曲线转向倾向的设计,在转弯制动时反而有过度转向倾向;后悬的变形在制动时与正常圆周行驶时不同,制动时由于车身前倾使后悬架大幅度伸张,致使前轮轮荷增大、后轮轮荷减小,当侧向加速度不变(即前后轮侧向力不变)的情况下,使得前轮侧偏角减小,后轮侧偏角增大,因而有减小不足转向的倾向.当踏板力大于205N 时,前轮发生抱死,该车失去转向能力,但是仍具有较好的维持圆周行驶的能力,具有很小的不足转向量.所以,该车具有较好的转弯制动性能.4 结束语针对该跑车的结构特点,建立了包含悬架、车身、制动等7个子系统的整车动力学模型,根据实车的试验方法设置了仿真条件,以不同的制动强度进行了直线制动仿真和转弯制动仿真.从仿真结果可以知道,该车具有较好的行车制动性能.研究表明,利用虚拟样机技术可以快速准确地对车辆的制动性能进行仿真,从而对其性能做出预测和评估,为汽车的设计和改进提供了重要的借鉴和指导作用.它可以减少开发费用,缩短设计周期,提高产品竞争力,具有重要的现实和工程意义.但是,这个整车模型将汽车的所有零部件都设置为刚体,没有考虑到某些部件本身的弹性特性,若进一步考虑到更多的影响因素,建立更为精确的模型,进行整车的制动性能的仿真研究,从而更为全面地对车辆的制动性能进行预测和评价.参考文献:[1] 余志生.汽车理论[M ].北京:机械工业出版社,2004.[2] 陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS 应用教程[M ].北京:清华大学出版社,2005.[3] 周 均,徐 进,李芹英.ADAMS 在汽车制动分析中的应用研究[J ].轻型汽车技术,2005,(6):15-17.[4] 郭正康.汽车整车转动惯量的计算与选取[J ].汽车研究与开发,1993,(6):42-44.[5] 王 晶,吕 浩.运用虚拟技术对夏利TJ 7101U 轿车进行制动分析[J ].天津汽车,2002,(2):11-14.[6] Using ADAMS/Car ,Mechanical Dynamics ,1nc.[Z].2002.作者简介:罗文水 (1981-),男,湖南邵阳人,硕士研究生,研究方向为汽车的操纵稳定性和制动性能.。
基于ADAMS与MATLAB的一种七自由度机械手轨迹跟踪控制仿真研究
基于ADAMS与MATLAB的一种七自由度机械手轨迹跟踪
控制仿真研究
梁喜凤;杨犇
【期刊名称】《科技通报》
【年(卷),期】2012(28)11
【摘要】针对多关节机械手轨迹跟踪控制精确的传递函数难以建立的问题,采用ADAMS与MATLAB联合仿真进行七自由度机械手轨迹跟踪控制研究。
结果表明:利用PID控制七自由度机械手具有较好的轨迹跟踪特性;利用ADAMS软件建立机械手系统虚拟样机可以取代传统的传递函数作为轨迹跟踪控制系统的被控对象。
【总页数】4页(P157-160)
【关键词】轨迹跟踪;PID;机械手;联合仿真;ADAMS
【作者】梁喜凤;杨犇
【作者单位】中国计量学院机电工程学院
【正文语种】中文
【中图分类】TP241.2
【相关文献】
1.基于ADAMS与MATLAB的机械手控制系统仿真研究 [J], 张骞
2.基于模糊补偿的七自由度机械手轨迹跟踪控制 [J], 杨犇;梁喜凤
3.基于Matlab的七自由度机械手逆运动学分析及仿真 [J], 宁祎;陈志苓
4.基于ADAMS与MATLAB的机械手控制系统仿真研究 [J], 张骞
5.基于LabVIEW的二自由度串联机械手轨迹跟踪控制 [J], 曾嘉煜;梁锐林;杨坤宏;王雪松;张立群;王宇林
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS_Vibration的曲轴受迫振动分析
河北科技师范学院学报 第25卷第2期,2011年6月Journa l of H ebe iN o r ma lU n i ve rs i ty o f Science&T echno l ogy V o.l25N o.2Jun,2011基于ADA M S/V ibrati on的曲轴受迫振动分析马淑英,陈立东,刘荣昌,陈建伟(河北科技师范学院机电工程学院,河北秦皇岛,066600)摘要:在对刚柔耦合曲轴系模型建立的基础上,给出了曲轴受迫振动的分析方法,利用A da m s/V i brati on软件对给定载荷条件下的曲轴扭转振动进行了动态仿真,仿真计算结果表明,在曲轴圆角处的位移和速度有一突变,说明在圆角处易产生变形,与实际相符。
关键词:曲轴;ADAM S;振动分析;振动模型中图分类号:TK422 文献标志码:A 文章编号:1672-7983(2011)02-0050-06曲轴系统作为发动机上主要的运动部件,它的性能优劣直接关系到发动机乃至整车的性能、可靠性和寿命。
曲轴系的振动是引发内燃机振动的主要因素。
曲轴上作用有大小、方向周期性变化的切向和法向作用力,故曲轴会产生扭转振动[1]。
由于曲轴较长,扭转刚度较小,且曲轴系的转动惯量较大,故曲轴扭转振动频率较低,在发动机工作转速范围内容易产生共振,从而引起较大噪声、加剧其它零件的磨损,甚至导致曲轴折断。
曲轴的振动本质上是三维形式的振动,不仅扭转振动是人们研究的主要内容之一,弯曲振动、纵向振动也成为研究的重要内容[2]。
因此,开展轴系多维振动的机理与控制方法的研究既有较高的学术价值,又有明确的工程应用意义。
1 曲轴的振动分析方法由于曲轴的结构和受力情况都比较复杂,在计算曲轴轴系的振动特性时,一般都要将轴系简化为比较简单的力学模型,以便于求解。
早期的曲轴振动研究主要采用离散化方法,并将曲轴振动作为纯扭转振动处理。
目前,多采用H o lzer法、传递矩阵法、有限元法、弹性波法、模态分析法等曲轴振动分析方法,其中传递矩阵法因计算方便快速应用最广,有限元法因计算精度高而受人青睐,弹性波传播法兼具上述两种方法的特点,开始被引入曲轴振动计算[3]。
基于ADAMS的盘式制动器振动分析
基于ADAMS的盘式制动器振动分析盘式制动器是一种常见的制动装置,广泛应用于汽车、摩托车等机动车辆中。
在制动过程中,由于制动器产生的摩擦力和摩擦产生的振动力,会导致制动器的振动,进而影响制动效果和驾驶安全。
因此,对盘式制动器的振动进行分析和优化是非常重要的。
为了对盘式制动器的振动进行分析,可以使用ADAMS(Advanced Dynamic Analysis System)这个动力学仿真软件。
ADAMS是一种基于多体动力学的仿真软件,可以模拟和分析机械系统的动力学行为,包括刚体运动、受力分析等。
以下是一种基于ADAMS的盘式制动器振动分析的步骤。
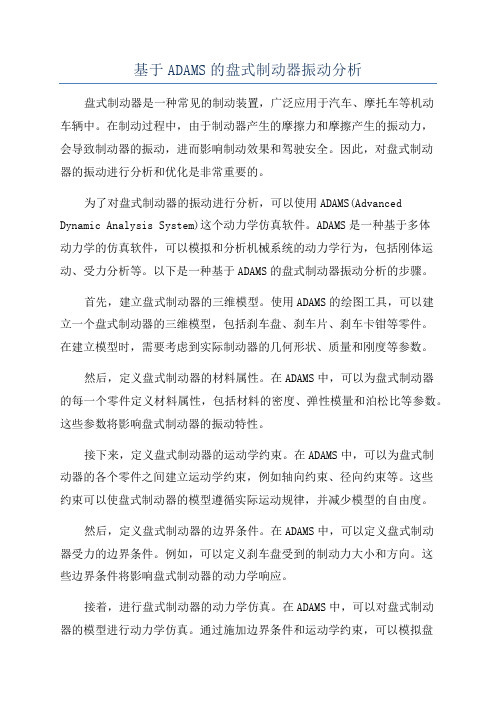
首先,建立盘式制动器的三维模型。
使用ADAMS的绘图工具,可以建立一个盘式制动器的三维模型,包括刹车盘、刹车片、刹车卡钳等零件。
在建立模型时,需要考虑到实际制动器的几何形状、质量和刚度等参数。
然后,定义盘式制动器的材料属性。
在ADAMS中,可以为盘式制动器的每一个零件定义材料属性,包括材料的密度、弹性模量和泊松比等参数。
这些参数将影响盘式制动器的振动特性。
接下来,定义盘式制动器的运动学约束。
在ADAMS中,可以为盘式制动器的各个零件之间建立运动学约束,例如轴向约束、径向约束等。
这些约束可以使盘式制动器的模型遵循实际运动规律,并减少模型的自由度。
然后,定义盘式制动器的边界条件。
在ADAMS中,可以定义盘式制动器受力的边界条件。
例如,可以定义刹车盘受到的制动力大小和方向。
这些边界条件将影响盘式制动器的动力学响应。
接着,进行盘式制动器的动力学仿真。
在ADAMS中,可以对盘式制动器的模型进行动力学仿真。
通过施加边界条件和运动学约束,可以模拟盘式制动器在制动过程中的振动响应。
仿真结果可以包括盘式制动器的位移、速度和加速度等信息。
最后,分析盘式制动器的振动响应。
根据仿真结果,可以对盘式制动器的振动进行分析。
例如,可以计算刹车盘的最大位移和振动频率,评估盘式制动器的振动稳定性和制动效果。
基于ADAMS与MATLAB的电磁制动器仿真分析
Hz ) , d 4 ( 6 2 . 5 Hz ~1 2 5 Hz ) , a 4 ( 0 Hz ~6 2 . 5 Hz ) 。原
方 向的加 速度 频域 图 的最 大 幅 值正 好相 吻合 , 并 且 这 个 频率 也 正处 于高频 细节信 号 频段 d ( 6 2 . 5 Hz ~1 2 5
Hz ) 中。
始信 号 S的离散 小波 变换 分解 可表示 为 :
S— d l +d 2 + d3 + d4 +a 4 。
各 分解 信号 的 横坐 标 均 为 时 间 , 等 于原 信 号 的 时
间历程 。从 图 8中可 以看 出在 频段 d ( 6 2 . 5 Hz ~1 2 5 Hz ) 上 的信号 明显 偏 离 振 动 中心 线 , 从 而 导 致 了 总振 动信 号 的非 对称 性分 布 。
c h i n e r y f a u l t d i a g n o s i s [ J ] .J o u r n a l o f S o u n d a n d Vi b r a —
t i o n,20 05. 284: 56 7 — 5 82 .
Ch e n g J u n s h e n g ,Yu De j i e ,Ya n g Yu .Ap p l i c a t i o n o f a n
北京 : 清 华 大 学 出版 社 。 2 0 0 5 .
何 正 嘉. 机 械 设 备 非 平 稳 信 号 的 故 障 诊 断 原 理 及 应 用 [ M] . 北京 : 高 等教 育 出版 社 . 2 0 0 0 . .
飞思 科 技 产 品研 究开 发 中心. 小 波 分 析 理 论 与 MAT —
参考文献 :
[ 1 ] 郑 建荣 . AD AMS虚 拟 样 机 技 术 入 门与 提 高 [ M] . 北京 : 机 图8 制动臂 D 在 Z方 向 的冲 击信 号 小 波 分 析 4层 分 解
基于ADAMS_的复杂路面下车辆行驶振动响应数值模拟
Modeling and Simulation 建模与仿真, 2023, 12(2), 1304-1311 Published Online March 2023 in Hans. https:///journal/mos https:///10.12677/mos.2023.122122基于ADAMS 的复杂路面下车辆行驶振动响应数值模拟金瑞琪,王 艳上海理工大学机械工程学院,上海收稿日期:2023年2月14日;录用日期:2023年3月14日;发布日期:2023年3月21日摘要随着我国社会经济的快速发展以及人们的生活水平的不断提升,人们对汽车的持有量也在不断增加。
脉冲路面如减速带、减速桩等作为车辆在驾驶过程中十分常见的路面,对其进行动力学仿真十分必要。
本文通过对简单四轮汽车模型在不同减速带地面模型下的振动进行分析得到了路面模型、车速以及车辆自身阻尼对车辆振动幅度的影响,并得到了其通过崎岖路面的振动幅度对比。
关键词动力学,冲击振动,ADAMS ,模态分析Numerical Simulation of Vehicle Vibration Response on Complex Road Surface Based on ADAMSRuiqi Jin, Yan WangSchool of Mechanical Engineering, University of Shanghai for Science and Technology, ShanghaiReceived: Feb. 14th , 2023; accepted: Mar. 14th , 2023; published: Mar. 21st , 2023AbstractWith the rapid development of China’s social economy and the improvement of people’s living standard, people’s ownership of cars is also increasing. Impulsive road surfaces such as speed bumps and speed piles are very common as vehicles in the driving process, and it is necessary to simulate their dynamics. In this paper, the vibration of a simple four-wheeled vehicle model under金瑞琪,王艳different speed bump ground models is analyzed to get the effect of road model, vehicle speed and vehicle’s own damping on the vibration amplitude of the vehicle, and the comparison of its vibra-tion amplitude through the rugged road surface is obtained.KeywordsDynamics, Impactvibration, ADAMS, Modal AnalysisThis work is licensed under the Creative Commons Attribution International License (CC BY 4.0)./licenses/by/4.0/1. 引言随着人们汽车保有量的日渐提升,人们越发关注车辆的乘坐舒适性和安全性。
基于ADAMS的汽车传动轴振动现象仿真分析

基于ADAMS的汽车传动轴振动现象仿真分析Chapter 1 IntroductionIn recent years, with the development of automotive technology, the design concept of cars has gradually shifted from performance-oriented to comfort-oriented. Improvements in ride comfort have become increasingly important for vehicle manufacturers, and the transmission shaft vibration phenomenon has received much attention. Vibration of the transmission shaft can cause not only noise and discomfort for passengers but also damage to the vehicle. Therefore, it is important to analyze the transmission shaft vibration using simulation methods. This paper aims to simulate and analyze the transmission shaft vibration phenomenon using the ADAMS software.Chapter 2 Transmission Shaft Dynamics AnalysisThe transmission shaft dynamics analysis is the foundation of the simulation and analysis of transmission shaft vibration. The dynamics analysis includes the determination of the natural frequency, modal shape, and mode of vibration of the transmission shaft. After the modal analysis of the transmission shaft, the dynamics model is established using the ADAMS software to simulate the vibration of the transmission shaft.Chapter 3 Simulation of Transmission Shaft VibrationIn this chapter, a simulation of the transmission shaft vibration is carried out using the ADAMS software. The simulation includes the determination of the vibration displacement, acceleration, and speed of the transmission shaft at different speeds. The simulation also includes the analysis of the vibration frequency and the transfer of force to other components. The results of the simulationare analyzed to determine the impact of the driving speed, load, and other factors on the transmission shaft vibration.Chapter 4 Analysis of Transmission Shaft VibrationIn this chapter, the results of the simulation are analyzed and the causes of the transmission shaft vibration are identified. The analysis includes the identification of the main factors affecting the vibration, such as the stiffness and mass of the transmission shaft, the balance of the propeller shaft, and the connection between the transmission shaft and other components. Solutions are proposed to reduce the vibration of the transmission shaft by adjusting the design parameters and improving the manufacturing process. Chapter 5 ConclusionThis paper comprehensively analyzes the transmission shaft vibration phenomenon using the ADAMS software. The simulation and analysis results provide a reference for the design and manufacturing of transmission shafts and can help improve the ride comfort and reliability of the vehicle. In the future, this method can be applied to the analysis of transmission shaft vibration in various types of vehicles, providing theoretical support for the optimization of the design and manufacturing process of automotive transmission systems.。
基于ADAMS的某4×4车辆振动响应仿真
基于ADAMS的某4×4车辆振动响应仿真谢广苏【摘要】4X4装甲车辆作为一种特种车辆,在设计时不但要考虑普通车辆考虑的振动问题,还需要考虑在遭受打击和车载武器开火情况下的振动问题.为此采用SolidWorks软件建立了简化的某4×4装甲车辆车体三维模型,导入ADAMS仿真软件中,添加车辆悬挂装置的弹簧原件和阻尼原件,并分别确定刚度和阻尼.进行仿真实验,模拟了车辆正面遭受炮击情况以及对侧面开火情况下的车身振动响应.随后进行了发动机启动、崎岖路面行驶的振动仿真实验.仿真结果表明装甲车辆在遭受炮击和开火状态下,乘员所处位置的振动加速度极大,需要设计专用的减震装置.【期刊名称】《农业装备与车辆工程》【年(卷),期】2019(057)005【总页数】4页(P45-48)【关键词】ADAMS;车辆;振动;仿真【作者】谢广苏【作者单位】200093上海上海理工大学机械工程学院【正文语种】中文【中图分类】E923.192;TJ811+.920 引言车辆的振动是典型的振动问题。
而对于装甲车辆,除了与普通车辆一样要考虑路面不平度和发动机振动等载荷对车辆振动的影响,还要考虑车载武器开火、受到攻击等冲击载荷下的振动响应[1-3]。
对于复杂的多自由度4×4车辆振动问题研究,采用软件仿真方法具有低成本、高效率的优点,可以在实际实验之前进行多次仿真实验,掌握实际振动系统的基本特征。
杨英[4]等利用ADAMS软件建立了四分之一汽车主动悬架的机械模型,在机械模型的基础上生成车辆主动悬架系统的动力学方程,该方法解决了主动悬架数学模型建立的难题。
杨振[5] 参照合肥工业大学方程式赛车,通过仿真软件ADAMS建立赛车模型,在ADAMS/Car模块中对模型进行稳态回转仿真实验,并对其结果进行评价,找出了赛车设计的优劣,大大提高了赛车设计的水平。
熊驰[6]以四轴商用车为原型,利用ADAMS多体动力学软件构建了双前桥转向车辆的虚拟样机模型,运用建立的虚拟样机模型进行标准蛇行仿真试验,对该双前桥转向车辆的响应进行了评分,分析了车辆的响应程度。
ADAMS软件在汽车制动仿真方面应用
ADAMS软件在汽车制动仿真方面应用1 前言机械系统动力学分析软件ADAMS(Automatic Dynamic Analysis of Mechanical System)以其强大的功能正迅速应用于各行各业,其中ADAMS/CAR 模块在汽车操纵稳定性和平顺性等性能仿真分析方面显示了突出的特点,已为广大汽车工程技术人员广泛应用。
但在制动性能仿真方面略嫌不足,如制动器只有钳盘式模型,且未引入制动力调节或ABS 等控制系统。
本文即以制动仿真为例,对ADAMS/CAR 仿真方面的应用扩展进行一些探讨,并重点研究具有制动力调节装置的制动仿真问题。
2 ADAMS/CAR 制动仿真2.1 ADAMS 简介ADAMS 集建模、求解和可视化于一体的数字化虚拟样机技术,可以有效地将三维实体模型及应用有限元分析软件描述的零部件模型有机地结合起来,准确地进行机械系统的各种模拟,以分析和评估系统的性能,从而为物理样机的设计和制造提供依据。
ADAMS 功能日益完善,所提供的ADAMS/Car、ADAMS/Engine、ADAMS/Chassis、ADAMS/Driveline、ADAMS/Driver、ADAMS/Tire、Suspension Design等汽车专业模块,能够帮助汽车工程师快速创建高精度的参数化数字样机和汽车的运动学和动力学仿真模型,进行汽车的操纵稳定性、制动性、乘坐舒适性和安全性等整车性能仿真分析。
2.2 ADAMS/CAR 的制动仿真功能ADAMS/CAR 模块的整车制动仿真中包括直线制动和转弯制动,直线制动仿真时需输入开始时间、初始速度、路面条件和档位等参数,转弯制动仿真时还需输入转弯半径、制动减速度、侧向加速度等参数。
制动仿真结果,可以通过结果的数据文件查看,也可以进入后处理窗口(Postprocessing Window)查看各种数据曲线[ ] 1 ,包括制动过程中的制动管路压力、制动力矩、制动距离、车速、减速度、轮速等制动性能参数以及整车和其他部件参数的变化曲线。
基于ADAMS的变速器虚拟样机仿真分析

基于ADAMS的变速器虚拟样机仿真分析陈福向广东粤电集团沙角A电厂, 511700王晓笋武汉大学动力与机械学院, 430072摘要:利用UG二次开发功能建立变速箱的CAD模型,在ADAMS/VIEW内通过装配建立模型的虚拟样机模型,通过编写接触力计算子程序实现了轮齿啮合力的计算,结合脚本控制语句实现了变速换挡过程的仿真。
关键词:变速器,虚拟样机,啮合力,换挡1.CAD模型的建立ADAMS/VIEW环境下需要借助外界CAD软件建立变速箱模型,采用Unigraphics(UG)[1]提供的Opengrip二次开发语言,编写了外啮合齿轮的参数化建模程序[2],通过调试编译生成可执行文件gear.grx。
在UG中齿轮的参数化建模程序的运行界面如下图1所示,需要提供的信息有齿轮的模数m、齿数Z、压力角A、齿顶高系数F、齿根高系数C、变位系数X 和齿厚B。
图1、UG内参数化齿轮建模对话框图2、在UG里建立的CAD模型图2所示的就是在UG中建立的变速箱CAD模型,对于造型复杂的齿轮可以很方便的建立,而且可以实现啮合齿轮对之间的轮齿精确咬合,从而为下一步向ADAMS中传输准确模型奠定了基础,ADAMS的SOLVER核心程序计算时,支持的基本三维模型格式是PARASOLID格式,因此,在UG中利用该软件提供的输出功能,输出所有独立刚体的PARASOLID格式文件。
2.虚拟样机模型的建立图3、变速箱的虚拟样机动力学模型(不含机架)利用ADAMS/VIEW进行组装,并根据各个部件之间的运动约束关系,在刚体上添加不同的铰约束和相互的接触力作用,其中接触力使用用户自编译的动态链接库文件计算,得到了变速箱的虚拟样机模型,如图3所示。
为了加快模型计算速度和计算的精确度,利用ADAMS软件提供的二次开发接口,利用FORTRAN编写了接触力的子程序,主要的ADAMS内部函数包括CNFSUB和CFFSUB,其中CNFSUB子函数用于计算接触力,其格式如下:SUBROUTINE CNFSUB(ID, TIME, PAR, NPAR, LOCI, NI, LOCJ, NJ,& GAP, GAPDOT, GAPDOTDOT, AREA, DFLAG, IFLAG, FORCE)其中PAR为程序输入参数,PAR被定义为一个列向量,其中K = P AR(1)表示接触刚度,E = P AR(2)表示刚性接触力指数,C = P AR(3)表示阻尼,D = P AR(4)默认穿透深度。
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析摘要:本文利用ADAMS软件对机械四连杆机构进行了运动仿真分析,通过对其运动性能、力学特性等方面的研究,为机械设计提供了理论基础和技术支持。
1.引言机械四连杆机构是一种常用的传动机构,在机械设计中起着重要作用。
其特点是结构简单、运动稳定、传动精度高,被广泛应用于各种机械装置中。
为了提高机械产品的设计效率和性能,需要对四连杆机构的运动特性进行充分分析和优化。
ADAMS软件是一种专业的运动仿真分析工具,可以对机械系统的运动行为进行较为精确的模拟和分析,具有很高的应用价值。
本文将利用ADAMS软件对机械四连杆机构进行运动仿真分析,以期为机械设计提供理论基础和技术支持。
2.机械四连杆机构的结构和原理机械四连杆机构是一种由四个连杆组成的传动机构,其结构简单,由四个连杆和四个铰链连接而成。
四连杆机构可以将输入运动转换为输出运动,并且通过连杆长度的设计可以调节输出运动的幅度和速度,具有广泛的应用价值。
机械四连杆机构的原理是通过各个连杆的相对运动,使得输出连杆实现期望的运动轨迹,并且不同的连杆长度和铰链布置可以实现不同的运动方式。
3.ADAMS软件的运动仿真分析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)软件是由美国麻省理工学院研发的一款专业的机械系统运动仿真分析工具,具有较高的精度和可靠性。
其建模简便,求解速度快,可以对机械系统的运动行为进行较为真实的模拟和分析。
利用ADAMS 软件可以实现对机械系统的运动学和动力学分析,可以得到系统的速度、加速度、力学特性等参数,为机械设计提供重要参考依据。
4.基于ADAMS的机械四连杆机构建模在ADAMS软件中建模机械四连杆机构,首先需要对其结构进行建模,包括连杆、铰链的参数化等。
其次对各个连杆和铰链的连接关系进行建立,可以根据实际情况进行参数化调整。
最后对系统施加输入运动条件,并设置输出参数,以便进行仿真分析。
基于MATLAB和ADAMS的四连杆机构运动仿真
基于MATLAB和ADAMS的四连杆机构运动仿真
任泽凯
【期刊名称】《装备机械》
【年(卷),期】2016(000)003
【摘要】在MATLAB/Simulink和ADAMS两种软件中,对四连杆机构进行运动仿真,并对结果加以分析.首先用传统方法对四连杆机构进行数学分析建模,得到运动学微分方程,并在Simulink中建立相应的数学模型,进行运动学仿真,得到相关杆件的运动特性曲线;然后通过虚拟样机软件ADAMS建立同一四连杆机构仿真模型,并设置相关参数,进而仿真得到机构中相关杆件的运动学时间响应曲线;最后对比不同软件的仿真结果,发现吻合情况较好,从而验证了ADAMS运动学仿真的可靠性与方便性.
【总页数】5页(P55-58,65)
【作者】任泽凯
【作者单位】哈尔滨工业大学(威海)汽车工程学院山东威海264209
【正文语种】中文
【中图分类】TH122;TP391.9
【相关文献】
1.基于ADAMS和MATLAB的喷涂机器人运动仿真研究 [J], 袁安富;沈思思;余莉;曾晶晶
2.基于ADAMS和MATLAB的机器人联合运动仿真 [J], 胡蕴博
3.基于MATLAB的平面四连杆机构运动仿真 [J], 刘龙;黎炯宏
4.基于ADAMS+MATLAB的移动焊接机器人运动仿真 [J], 王帅;张华;叶艳辉
5.基于ADAMS的机械四连杆机构运动仿真分析 [J], 栾建举; 杜茂华
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS的碟式分离机主轴系统振动分析

维普资讯
边不均匀磨损等,都会造成 系统振 动 。但是 ,对于碟 J 式分离机影响最大 的是工作频率接近系统的 固有频 率所 引起 的系统共振 。共振导致轴承 、传动件的使用 寿命 急
剧下降 ,严 重的将破坏机 器。
的首要 步骤 。利用 A AMS的振动 分析模块 ,直接可 以 D
得到主轴 系统各 阶振 型。 分析发现这些模态频率 大都集 中在 0 50 z 间,是分 离机工作 的频率 范 围。如果 — 0H 之 工作频 率接近各阶 固有频率 ,则会 产生共振 ,大 大影 响
工作效率。
通过频幅响应图 6 ,得到一阶固有频率为 2 .H , 17 z
二、建立主轴系统的动力学模型
主轴 系统主要由主轴 、 承 、轴承座 、缓冲垫 、缓 轴 冲器 座 、 向弹簧 、轴 向弹簧 、螺 塞和转 鼓 组 件等 构 径 成 。图 1 为一种典型结构的分离机主轴系统。 为 了使动力学仿真运算快捷精确 ,在建模过 程中可 对实际结构进行简化 。如碟式 分离机转鼓部分是 由转 鼓
名 称 缓 冲垫 上 轴 承 主 轴 转 鼓 组
∞
名 称 大 地 蜗 杆 蜗 轮 下 轴 承
螺 塞
编 号 B 5 B 6 B 7 B 8
机的工作转 速。为了使工作转 速远 离二 阶转速 ,可通 过 改变系统参数来改变系统的固有频率。
l
一 - - - -
一 …
这种构件在受力 时,不会产生变形 。然而从分离机结构 可知其主轴是细长构件。在高速旋转 的情况下 ,转鼓产 生巨大的离心力 ,使主轴的变形 比较大 ,这在建模过程 中不能被忽视 。为保证仿真计算 的精 确性 ,将刚性主轴 替换成 可产生变形的柔性体 。
制动抖动引起的转向盘振动传递途径分析

原稿收到 7日。
维普资讯
汽
车
工
程
20 年 ( 2 卷 ) 3 06 第 8 第 期
心连线 中点 为原点 , 直 垂 向上为 z , 轴 水平向后为
- 、
2 2 齿轮齿条式转 向系 . 齿轮齿条式转 向子系 统采用 局部 坐标 系, 坐标 原点 位于 转 向盘 圆心 处 , Y z轴 的方 向分别 为转 、 向盘 的径 向 、 向 和法 向 。 切
T r u h s n l n l s n t n r q e c o i s h ir t n t n mi i n p t r m r k te i g w e l h o g i a ay i i i a d fe u n y d man ,t e vb ai r s s o a h fo b a e t s r h e g a s me o a s o e n
关键词 : 制动抖动 。 转向盘振动, 传递途径分析。 橡胶弹性元件
An An lsso rn miso ah fo B a eJ d e oSe r gW h e b ain ayi n T a s sin P t rm rk u d rt tei e lVirt n o
动, 制动力矩波动是引起制动时转向盘振 动现象 的 根本原因; 波动频率与车轮转速应满足
f= “ ・ / 0 m n 6 () 1
式中 nm为频率的阶次 , 为车轮转速 ; 向盘一 的 l t n 转 I -
振动和制动盘的转速主要呈 2阶关系。随着制动时
振动动力学仿真模型。该软件是一种参数化的基于 对象的多刚体动力学建模和仿 真工具 , 能够加速和
向盘、 制动踏板、 车身底板以及座椅等剧烈振动的现
基于ADAMS的SCARA机器人的振动特性分析

基于ADAMS的SCARA机器人的振动特性分析基于ADAMS的SCARA机器人的振动特性分析一、引言SCARA机器人作为一种常见的工业机器人,由于其结构独特、性能稳定而在现代制造业中得到广泛应用。
然而,在实际工作中,SCARA机器人的振动问题经常会影响其工作精度和性能。
为了解决这一问题,本文基于ADAMS软件对SCARA机器人的振动特性进行了分析,并探讨了振动对机器人性能的影响。
二、SCARA机器人的基本结构与工作原理SCARA机器人是一种具有水平手臂和垂直手腕的工业机器人,其结构类似于人类手臂。
它由两个旋转关节和一个伸缩关节组成,可以在平面内完成各种复杂操作。
其工作原理是通过电脑控制系统驱动电机,实现运动轨迹和工作任务的控制。
三、ADAMS软件在振动特性分析中的应用ADAMS是一种用于仿真多体动力学系统的软件工具,具有强大的建模和分析功能。
在SCARA机器人的振动特性分析中,ADAMS可以模拟机器人的运动过程,计算机器人各个部件的振动情况,并提供相关的参数和结果。
四、SCARA机器人振动特性的分析方法1. 机器人结构刚度的分析:机器人的结构刚度是影响振动的重要因素之一。
通过建立机器人的有限元模型,可以计算机器人各个部件的刚度,分析其对整个机器人振动的影响。
2. 负载对机器人振动的影响:SCARA机器人在工作时通常会承载一定的负载,而负载的大小和位置会对机器人的振动特性产生影响。
通过在ADAMS中设置不同的负载条件,可以模拟机器人在不同工作状态下的振动情况。
3. 控制系统的反馈调节:机器人的控制系统可以通过调节控制参数实现对机器人振动的控制。
通过在ADAMS中模拟机器人的控制系统并进行参数调节,可以分析控制系统对机器人振动特性的影响。
五、实验结果及讨论在ADAMS中建立了SCARA机器人的模型,并利用上述方法对其振动特性进行了分析。
实验结果显示,在相同工作条件下,机器人的振动幅度随负载的增加而增大,这与实际工作中的情况相符合。
转向系统NVH研究综述
转向系统NVH研究综述陈书明;王登峰;苏丽俐;昝建明【摘要】转向系统的NVH性能是影响整车NVH性能的重要因素之一,研究转向系统的NVH具有重要的意义.本文综述了转向系统NVH方面的研究,介绍了制动引起的方向盘抖动现象及其机理,阐述了制动力矩波动、制动压力波动以及制动盘端面跳动等对方向盘抖动产生影响的因素;对电动助力转向器助力电机产生的振动和液压动力转向器的振动导致转向系统的振动进行了回顾,重点介绍了液压助力转向泵引起的振动和噪声问题,以及改善其NVH性能的方法和途径;同时回顾了转向轮摆振现象及其机理,以及转向轮摆振的多体系统动力学研究方法,着重阐述了将转向轮摆振系统看成一个多输入多输出的复杂非线性系统的研究方法,并对其它原因引起的方向盘振动进行了介绍.最后,对未来的研究工作提出了一些展望.【期刊名称】《汽车工程学报》【年(卷),期】2011(001)005【总页数】13页(P429-441)【关键词】转向系统;制动抖动;转向泵;前轮摆振;噪声【作者】陈书明;王登峰;苏丽俐;昝建明【作者单位】吉林大学汽车仿真与控制国家重点实验室,吉林,长春130022;汽车噪声振动和安全技术国家重点实验室,重庆400039;吉林大学汽车仿真与控制国家重点实验室,吉林,长春130022;吉林大学汽车仿真与控制国家重点实验室,吉林,长春130022;汽车噪声振动和安全技术国家重点实验室,重庆400039【正文语种】中文【中图分类】U467.4转向系统的振动、噪声、声振粗糙度统称为转向系统NVH(Noise,Vibration and Harshness)问题,它可以被驾驶员直接感知,是影响整车NVH水平的重要组成部分。
转向系统中的NVH表现形式主要有以下几种:一是汽车在特定行驶工况下或发动机怠速时激起方向盘抖动,以及由于制动管路压力波动、制动器摩擦副受热蠕变和接触不均产生的制动力矩波动引起转向系统的振动;二是电动助力转向器助力电机产生的振动和液压动力转向器的振动导致转向系统的振动;三是汽车以一定的车速行驶时引起转向轮摆振。
悬架对汽车盘式制动器制动抖动的影响分析
悬架对汽车盘式制动器制动抖动的影响分析
姬永胜;冯金芝;林阳;杨晓俊;陆壮
【期刊名称】《农业装备与车辆工程》
【年(卷),期】2018(56)9
【摘要】在ADAMS仿真软件中创建悬架制动抖动的动力学模型.为了考虑悬架零部件模态对制动抖动信号的影响,对关键零部件进行模态试验及有限元模态分析,在此基础上搭建制动抖动的刚柔耦合模型.在时域和频域中分别进行仿真,考察各个测点处的振动加速度的RMS值,辨识出悬架在制动抖动过程中的传递路径以及共振频率,证明悬架的衬套刚度并非只对制动抖动起到衰减作用,随着振动频率的变化有时会起到放大的作用.
【总页数】4页(P52-55)
【作者】姬永胜;冯金芝;林阳;杨晓俊;陆壮
【作者单位】200093 上海市上海理工大学机械工程学院;200093 上海市上海理工大学机械工程学院;200122 上海市上海汇众汽车制造有限公司;200122 上海市上海汇众汽车制造有限公司;200122 上海市上海汇众汽车制造有限公司
【正文语种】中文
【中图分类】U463
【相关文献】
1.基于制动器多点接触模型的初始SRO和DTV对制动抖动的影响分析 [J], 孟德建;张立军;余卓平
2.非独立悬架参数变化对悬架系统特性影响分析 [J], 王飞;李晓娜
3.汽车盘式制动器制动抖动问题的研究 [J], 陈红;陈永林
4.汽车盘式制动器制动抖动问题的研究 [J], 陈红;陈永林;
5.悬架下摆臂衬套刚度对制动抖动影响的试验研究 [J], 孙延伟;潘筱;秦全民
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
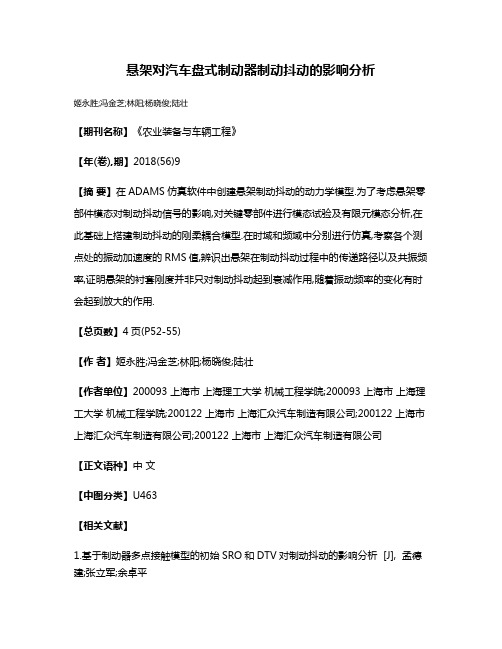
图 2 制动力矩时域的仿真结果
×10 4.5 4 3.5 3 2.5 2 1.5 1 0.5 0 50 150 100 频率 (Hz) 200 250
10
1000 800 转速(rpm) 600 400 200 0
图 3 制动力矩三维谱阵
Dz/dt (m/s ) Dz/dt (m/s )
2
2
2
2
8
9
横拉杆横向 加速度(m/s )
2
-2 7 2 0 -2 7 3 2 1 0 -1 7
7.5
8
8.5
9
9.5
10
10.5
11
11.5
12
方向盘纵向 加速度(m/s2)
3
7.5 8 8.5 9 9.5 10 10.5 11 11.5 12
结论
本文建立了盘式制动器仿真模型,通过计算发现,在制
方向盘垂向 加速度(m/s2)
15
20
25
频 率 (h z )
30
35
40
图 5(b) 制动盘到方向盘的传递函数仿真结果
2.4 传递途径分析
以右侧前悬架和转向系统为例,方向盘 z 向,横拉杆 y 向 及悬架 z 向的振动加速度信号的振幅在时域内都历经了小-大小的变化过程,表明了振动由弱变强再变弱。同时,采用相干 分析来确定信号间关系。相干系数表明输出与输入之间的相关 程度, 通过相干分析可以初步确定振动传递途径。 经数据处理, 得到相干分析结果的三维谱阵。由图 7 可知,振动频率和车轮 转速呈明显的线性关系,相干系数大于 0.9。据此可判断振动 信号传递途径为: 制动器→悬架→转向横拉杆→方向盘。 相应 的实车试验也验证了这一结论 [2] 。采用同样的分析方法发 现,振动信号也可能沿着:制动器→悬架→副车架→转向机 壳体→方向盘的路径传递,但这有待进一步试验的验证。
动盘装偏情况下会引起制动力矩的波动, 且波动频率随着车 轮转速的降低而降低,表现出扫频信号的特点,进而导致前 悬架和方向盘的剧烈振动。故正确的安装制动盘,尽可能减
7.5
8
8.5
9
9.5
10
10.5
11
11.5
12
小安装误差是消除制动抖动现象的根本方法; 1) 通过整车仿真分析找出了振动信号从制动器制动力矩 →悬架→转向横拉杆→方向盘的传递途径并为试验所证实,同 时发现了另一条可能的传递途径:制动器→悬架→副车架→转 向机壳体→方向盘,但这有待进行进一步试验加以验证; 2) 架下三角摇臂与副车架间及副车架与车身间的橡胶 元件是振动信号传递途径中的主要放大环节。 通过改变他们 的线刚度可以使得共振峰频率发生改变, 使得制动力矩的扫 频范围错开放大环节的共振频率, 从而削弱甚至消除制动时 方向盘发生抖动的现象。 综上所述,本文所建立的多刚体动力学模型、仿真分析 方法以及控制措施的分析是正确有效的。
[1]
图 1 制动盘装偏情况下的制动器仿真模型 表 1 铰接副及其约束自由度 铰链类型 移动副 转动副 固定副 铰接数量 2 1 3 约束自由度数 2*5 1*5 3*6
1
盘式制动器仿真模型建立及分析
为了更好地了解基于制动盘装偏情况下制动力矩波动
1.1 模型建立
1.2 仿真计算及结果分析
收稿日期:2005-04-05 修回日期:2006-03-03 作者简介: 高晓杰(1981-), 男, 上海人, 硕士生, 研究方向为汽车系统动 力学及控制; 余卓平(1960-), 男, 江西人, 教授, 院长, 博士, 研究方向 为汽车系统动力学及控制; 张立军(1972-), 男, 吉林人, 讲师, 博士, 研 究方向为汽车噪声振动控制。
2
整车仿真模型的建立及分析
从上述分析可知,制动过程中,在制动盘装偏条件下制
传递函数
2.1 整车仿真模型的建立
动力矩会产生明显的波动,表现为扫频信号的特点,通过轮 胎与地面的相互作用使得悬架部分发生明显的振动, 进而传 递到方向盘上。为了能够准确的分析振动信号的传递途径, 考察振动信号在传递过程中的放大和衰减情况,利用 ADAMS/car 模块建立了如下的整车模型。整个模型包括麦 弗逊式前悬架(包含横向稳定杆)、齿轮齿条式转向机总成、 方向盘、复合梁式后悬架、基于魔术公式的轮胎模型及简化 为质量球的车身。具体建模过程见参考文献[4]。
将整车平移惯量等效为制动盘的转动惯量, 在制动盘初 速度 1100rpm 时进行制动, 施加的制动力大小等于该制动器 系统在制动油压为 2.4Mpa 时计算得到的制动力。以右侧为
·1668·
第 18 卷第 6 期 2006 年 6 月
Vol. 18 No. 6
高晓杰, 等:基于 ADAMS 的制动抖动现象仿真分析
Simulation and Analysis of Brake Judder Phenomenon by Using ADAMS
GAO Xiao-jie, YU Zhuo-ping, ZHANG Li-jun, YIN Dong-xiao, NING Guo-bao
(College of Automotive Studies of Tongji University, shanghai 200092, China)
图 4 整车多刚体动力学仿真模型
2.2 仿真工况的确定
结合道路试验[2]及前述的仿真结果确定初始条件。采用直 线制动工况,制动初速度为 120km/h;对两前轮分别施加等幅 正弦扫频制动力矩,根据制动抖动的道路试验结果确定制动 力矩均值为 200Nm,波动幅度 40Nm,频率范围 50- 10Hz。
Jun., 2006
例,制动力矩仿真结果见图 2;同时利用 matlab 进行数据处 理,通过短时傅利叶变换 得到了制动力矩的三维谱阵见图 3。
240 230 制动力矩(Nm) 220 210 200 190 180 170 0 2
[3]
2.3 仿真结果的分析与验证
由图 5 看出,时域上振动加速度的幅值都经历了小-大小的变化过程, 频域上均在 25Hz 附近出现了明显的共振峰。 当车轮的转速降低到 860rpm,方向盘径向和法向振动加速 度的幅值开始增大;当转速为 720rpm,振动加速度达到最 大;当转速继续降低,幅值开始衰减。这说明只有在一定的 车速范围内, 也即一定的激振频率范围内才会发生制动抖动 现象。由图 5(b)可知,车辆在等幅扫频制动力矩的激励下,
DOI:10.16182/ki.joss.2006.06.065
第 18 卷第 6 期 2006 年 6 月
系 统 仿 真 学 报© Journal of System Simulation
Vol. 18 No. 6 Jun., 2006
基于 ADAMS 的制动抖动现象仿真分析
高晓杰,余卓平,张立军,尹东晓,宁国宝
4
பைடு நூலகம்
6
8
10 12 14 16 18 20 时间 (s)
方向盘在 25Hz 附近出现了明显的共振峰,这说明从制动器 到方向盘的传递路径上,存在频率在 25Hz 左右的放大环节,会 加剧制动抖动的负效应。随后的道路试验也验证了这一结论[2]。
转速(rpm) 1500 1000 500 0 7 2 1 0 7 3 2 1 0 -1 7 8 9 10 11 12
Abstract: By using ADAMS/view, a simulation model of disk brake system was established and the brake torque variation due to disc side face run-out was analyzed. Furthermore by using ADAMS/car, a full vehicle model was established, and through simulation, the vibration transmission path from brake system to steering wheel was confirmed and the source of magnifying role in the transmission process was made clear. In the end, the vibration control method by means of adjusting the rigidity of rubber bushing was put forward to eliminate the brake judder phenomenon. Key words: brake judder; side face run-out; brake torque variation; ADAMS
制动器制动力矩波动,以及由此引起的方向盘、制动踏板、车 身底板以及座椅等剧烈抖动的现象。制动抖动是制动系统的常 见故障之一, 严重影响车辆安全性和舒适性, 造成巨大损失 。 研究结果表明[2],制动引起的方向盘抖动的根源是制动 时制动力矩的波动, 制动盘安装后的端面跳动(Side face runout, SRO)是引起制动力矩波动的一个重要因素。 引起制动盘 安装后端面跳动的因素主要包括制动盘的加工误差、 轮毂的 加工误差、 制动盘的装配误差、 制动器的使用环境和热影响等。 本文通过振源形成及振动传递途径两方面从理论上分 析了制动抖动现象。 首先利用 ADAMS 软件分别建立了盘式 制动器和整车仿真模型, 考察了在制动盘装偏条件下制动力 矩波动的特点;进而对整车仿真模型施加相应的制动力矩, 通过仿真计算确定了从制动器到方向盘的振动传递途径, 分 析了传递途径中各零件对制动抖动的吸收与放大, 最后提出 了通过调节前悬架弹性衬套刚度的振动控制方法。
10
11
12
8
9
时 间 (s)