基于STM32的测量定位系统设计说明
基于STM32的GPS定位信息显示终端设计
基于STM32的GPS定位信息显示终端设计【摘要】基于STM32F103微控制器、GPS模块和TFT显示屏的硬件平台,介绍了一种利用串口DMA(Direct Memory Access,直接内存存取,STM32F103内部外设的一种)的GPS定位信息解析和显示设计方案。
本方案详细介绍了STM32F103串口DMA初始化过程以及GPS定位信息中GPRMC字符帧的解析和存储。
【关键词】GPS;STM32;DMA;USART;GPRMCSTM32-based GPS Positioning Information Display TerminalCAO Wen-tao(Mechanical & Electrical Engineering College of Jiaxing University,Jiaxing Zhejiang 314033)【Abstract】Based on the STM32F103 MCU,GPS module and TFT display hardware platform,a USART DMA(Direct Memory Access)based for positioning information analysis and display design was introduced. The design details STM32F103 USART DMA initialization process and GPS positioning information GPRMC character frame analysis and storage.【Key words】GPS;STM32;DMA;USART;GPRMC0 前言现今,我们对移动定位的需求越来越重视。
GPS作为经典的定位手段已广泛应用于智能手机、交通导航、军事武器、智慧物流、安防监控等领域。
基于STM32单片机的高精度超声波测距系统的设计

基于STM32单片机的高精度超声波测距系统的设计一、本文概述超声波测距技术因其非接触、高精度、实时性强等特点,在机器人导航、车辆避障、工业测量等领域得到了广泛应用。
STM32单片机作为一种高性能、低功耗的嵌入式系统核心,为超声波测距系统的设计提供了强大的硬件支持。
本文旨在设计一种基于STM32单片机的高精度超声波测距系统,以满足不同应用场景的需求。
二、超声波测距原理本部分将介绍超声波测距的基本原理,包括超声波的产生、传播、接收以及距离的计算方法。
同时,分析影响超声波测距精度的主要因素,为后续系统设计提供理论基础。
三、系统硬件设计3、1在设计基于STM32单片机的高精度超声波测距系统时,我们遵循了“精确测量、稳定传输、易于扩展”的总体设计思路。
我们选用了STM32系列单片机作为系统的核心控制器,利用其强大的处理能力和丰富的外设接口,实现了对超声波发射和接收的精确控制。
在具体设计中,我们采用了回波测距法,即发射超声波并检测其回波,通过测量发射与接收之间的时间差来计算距离。
这种方法对硬件的精度和稳定性要求很高,因此我们选用了高精度的超声波传感器和计时器,以确保测量结果的准确性。
我们还考虑到了系统的可扩展性。
通过STM32的串口通信功能,我们可以将测量数据上传至计算机或其他设备进行分析和处理,为后续的应用开发提供了便利。
我们还预留了多个IO接口,以便在需要时添加更多的传感器或功能模块。
本系统的设计思路是在保证精度的前提下,实现稳定、可靠的超声波测距功能,并兼顾系统的可扩展性和易用性。
31、1.1随着物联网、机器人技术和自动化控制的快速发展,精确的距离测量技术在各个领域的应用越来越广泛。
超声波测距技术作为一种非接触式的距离测量方式,因其具有测量精度高、稳定性好、成本相对较低等优点,在工业自动化、智能家居、机器人导航、安防监控等领域得到了广泛应用。
STM32单片机作为一款高性价比、低功耗、高性能的嵌入式微控制器,在智能设备开发中占据重要地位。
基于STM32的测量定位系统设计

第一章绪论1.1概述1.1.1研究现状在地质勘探或是油田勘探的过程中,常会用到地震勘探。
爆炸震源是地震勘探中广泛采用的非人工震源。
虽然目前已发展了重锤、连续震动源、气动震源等一系列地面震源,但陆地地震勘探经常采用的重要震源仍为炸药。
炸药安放的过程中需要测量起爆电缆的长度,准确的测定线路的长度是勘探顺利进行的前提和保证。
但是由于炸药安放在地面下的竖井中,难以直接测量线缆的长度。
目前勘测中常使用的方法是利用电阻表测量电缆的电阻值,再通过换算得出导线的长度。
测量过程中需要人工对测量结果进行换算和记录,不仅增加了勘探的工作量,在换算和记录过程中还容易产生错误。
在地址勘测中,勘测地点往往都在野外,缺乏固定的标记物和指示。
尤其在密林和荒漠等环境中,必须借助仪器来定位。
目前最常用定位仪器通常都要使用到GPS。
GPS是Global Positioning System(全球定位系统)的缩写,是美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
该系统的建立从根本上解决了人类在陆地、海洋、航空、航天等各个方面的导航和定位问题, 具有很高的实用价值。
在电力系统通信和电力系统自动化等领域也有广泛的应用。
当初,设计GPS系统的主要目的是用于导航,收集情报等军事目的。
但是,后来的应用开发表明,GPS系统不仅能够达到上述目的,而且用GPS卫星发来的导航定位信号能够进行厘米级甚至毫米级精度的静态相对定位,米级至亚米级精度的动态定位,亚米级至厘米级精度的速度测量和毫微秒级精度的时间测量。
因此,GPS系统展现了极其广泛的用途。
用GPS信号可以进行海、空和陆地的导航,导弹的制导,大地测量和工程测量的精密定位,时间的传递和速度的测量等。
对于测绘领域,GPS卫星定位技术已经用于建立高精度的全国性的大地测量控制网,测定全球性的地球动态参数;用于建立陆地海洋大地测量基准,进行高精度的海岛陆地联测以及海洋测绘;用于监测地球板块运动状态和地壳形变;用于工程测量,成为建立城市与工程控制网的主要手段。
基于单片机的GPS设计

基于单片机的GPS设计随着科技的快速发展,单片机已经成为现代电子技术中不可或缺的一部分。
为了更好地了解单片机的发展和应用,我们需要研究相关的外文文献,对于非母语读者来说,中文翻译也是必不可少的。
本文将介绍一些重要的单片机的外文文献和对应的中文翻译。
"Microcontroller Fundamentals" by John M. Hughes. This book provides a comprehensive introduction to microcontrollers, including their history, architecture, programming, and applications. It is an excellent resource for anyone who wants to learn about microcontrollers."Embedded Systems: A Perspective on MCU and SoC" by Yatin Chaudhary. This book provides an overview of embedded systems, including a detailed discussion on microcontrollers and system-on-chip (SoC) technology. It is a valuable resource for engineers and researchers in the field of embedded systems. "8051 Microcontroller: Architecture, Programming, and Applications" by K.K. Ray and M.K. Dash. This book provides a comprehensive guide to the 8051 microcontroller, including itsarchitecture, programming, and applications. It is an essential resource for students and professionals who want to learn about the 8051 microcontroller.《单片机基础》——李晓明译。
基于STM32的GPSGPRS电子地图

摘要论文研究的GPS定位系统主要分为四大部分: GPS定位,STM32f103rbt6,GPRS 传输及PC机用户界面部分。
GPS定位使用的是NEO-6M模块,而GPRS数据传输部分的核心部件GPRS模块采用了Siimcom公司SIM900A模块,MCU则使用ST公司推出的基于ARM Cortex-M3内核的STM32f103rbt6。
在整个硬件系统中STM32f103rbt6作为系统的主控制芯片,接受由 GPS 模块采集到的位置信息并对 GPRS 模块进行控制,将坐标信息通过GPRS 模块发到 Internet 上的监控电脑主机。
利用UDP使用谷歌地图实时显示移动对象的位置信息,这样设计者可以在电脑上方便的监控移动对象的位置。
本文完成基于 GPS 和 GPRS轨迹记录系统的硬件电路和软件程序的设计。
硬件部分主要包括STM32f103rbt6外围电路设计,PCB 电路板设计制作。
软件部分则是包含了 STM32f103rbt6控制 GPS 和 GPRS 模块的程序,上位机部分主要对GPRS传送得到的数据的接收。
关键词:GPS;GPRS;STM32f103rbt6目录1 引言[3] (1)2 概述 (2)2.1GPS轨迹记录系统概述 (2)2.2系统设计方案思路 (2)2.3 研究方向及相关技术 (2)2.3.1研究方向 (2)2.3.2 GPS相关技术[29] (2)2.3.3 GPRS相关技术[19] (5)2.3.4上位机软件相关技术 (7)3 系统总体设计 (8)3.1 总体结构 (8)3.2 芯片的选择 (8)3.3.1 GPS模块:NEO-6M (8)3.3.2主控芯片:STM32f103rbt6 (8)3.3.3 数据传输模块:SIM900A[13] (8)3.3其他说明 (9)4 硬件电路设计 (10)4.1 STM32F103RBT6电路设计 (10)4.1.1 STM32F103RBT6介绍[6] (10)4.1.2 STM32F103RBT6外围电路 (10)4.2 GPS模块电路设计 (13)4.3 GPRS模块电路设计 (14)4.3.1 GPRS模块介绍[12] (14)4.3.2 GPRS模块外围电路 (15)5 软件设计 (18)5.1 软件总述 (18)5.2 单片机STM32F103RBT6软件设计 (19)5.2.1 单片机读取GPS数据 (19)5.2.2单片机发送GPS数据 (19)5.3 GPS软件设计 (20)5.4 GPRS软件设计 (20)5.5 PC机软件设计 (20)5.5.1数据的标注 (20)5.5.2数据的存储 (20)5.5.3数据的调用 (20)6 系统的总体组装与调试 (21)6.1系统组装 (21)6.2 实测 (22)7 结束语 (23)参考文献 (24)附录 (26)1原理图 (26)2源程序 (28)1 引言[3]GPS系统的前身是美军研制的一种子午仪卫星定位系统(Transit),最初的GPS计划在联合计划局的领导下诞生了,该方案将24颗卫星放置在互成120度的三个轨道上。
基于STM32的PT100温度测量

基于STM32的PT100温度测量目录一、前言 (1)二、系统描述 (1)2.1 综述 (1)2.2 系统框图 (1)2.3 功能实现 (1)三、硬件设计 (2)3.1 STM32 微控制器 (2)3.2 PT100温度传感器电路 (3)3.3 1602液晶屏 (4)四、软件设计 (4)4.1 ADC程序 (4)4.2 1602LCD显示程序 (5)4.3 主程序 (5)五、性能测试 (5)六、课程设计心得 (6)参考文献 (6)附录1:系统实物图 (7)附录2:系统主要程序 (7)一、前言Cortex-M3 是 ARM 公司为要求高性(1.25DhrystoneMIPS/MHz)、低成本、低功耗的嵌入式应用专门设计的内核。
STM32 系列产品得益于 Cortex-M3 在架构上进行的多项改进,包括提升性能的同时又提高了代码密度的 Thumb-2 指令集和大幅度提高中断响应的紧耦合嵌套向量中断控制器,所有新功能都同时具有业界最优的功耗水平。
本系统是基于 Cortex-M3 内核的 STM32 微控制器与PT100温度传感器的温度测量,在硬件方面主要有最小系统板、1602LCD 液晶屏以及PT100温度传感电路,在软件方面主要有 1602LCD 液晶屏的驱动,ADC 功能的驱动,及滤波算法设计。
整个设计过程包括电子系统的设计技术及调试技术,包括需求分析,原理图的绘制,器件采购,安装,焊接,硬件调试,软件模块编写,软件模块测试,系统整体测试等整个开发调试过程。
二、系统描述2.1综述本系统是基于 STM32微控制器所设计的多功能画板,该画板具有基本的绘画功能及画布颜色的选择,触摸屏校正等功能。
整个系统模块分为三个模块:ALIENTEK MiniSTM32开发板、液晶显示。
MiniSTM32开发板是ALIENTEK 开发的是一款迷你型的开发板,小巧而不小气,简约而不简单。
上面有芯片工作需要的资源,时钟控制电路、复位电路、JTAG 控制口以及与外围电路相连的接口。
基于STM32人员定位检测硬件系统设计
• 182•基于STM32人员定位检测硬件系统设计天津职业技术师范大学工程实训中心 戴健雄 王自有 刘卫华【摘要】针对室内检测人员传统方案,利用热释电元件检测静止人员或移动缓慢人员存在设计周期长、成本高等问题,基于STM32微处理器应用图像处理技术实现人员定位检测。
阐述基于STM32系统硬件电路构成、工作原理及软件设计。
数据通过TFTLCD显示,数据实时可通过串口传给计算机便于观测记录。
实验结果表明,人员定位检测可靠,电路结构简单。
【关键词】STM32;OV7670;人员检测;图像处理0 引言目前市场上室内检测人员的热释电传感器只能探测或感应移动体温人体的热源,必须要移动才能感知到有人的存在或者有人经过(自动门和红外放到就是运用了这个原理)。
因此运用这种传感器做出来的探测器只能探测到移动的人,而难以判别其侦测范围是否有人的存在(静止不动的人),因此无法直接使用这种传感器作为进行有人判定。
随着电子技术的发展和电路集成度及工艺的提高,基于嵌入式系统的图像采集处理平台的开发日益增多,它具有成本低廉、结构紧凑、功耗低的优点。
STM32为ST 公司生产的基于ARM Cortex-M3内核的32位微控制器,主频72MHz 。
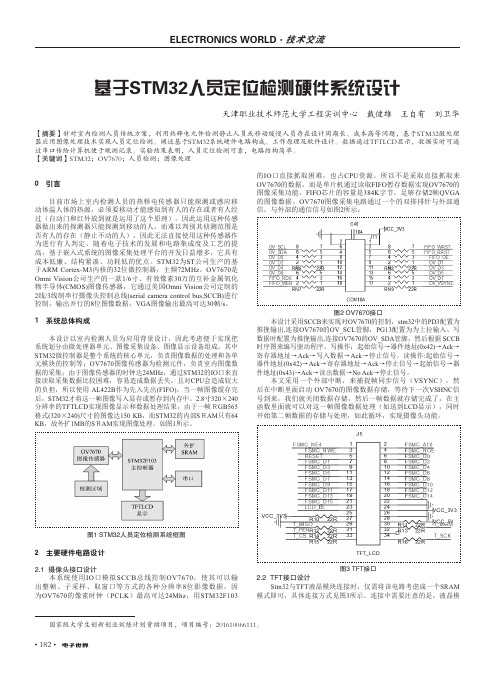
OV7670是Omni Vision 公司生产的一款1/6寸、有效像素30万的互补金属氧化物半导体(CMOS)图像传感器,它通过美国Omni Vision 公司定制的2线/3线制串行摄像头控制总线(serial camera control bus,SCCB)进行控制,输出并行的8位图像数据,VGA 图像输出最高可达30帧/s 。
1 系统总体构成本设计以室内检测人员为应用背景设计,因此考虑便于实现把系统划分由微处理器单元、图像采集设备、图像显示设备组成。
其中STM32微控制器是整个系统的核心单元,负责图像数据的处理和各单元模块的控制等;OV7670图像传感器为检测元件,负责室内图像数据的采集;由于图像传感器的时钟达24MHz ,通过STM32的IO 口来直接读取采集数据比较困难,容易造成数据丢失,且对CPU 会造成较大的负担,所以使用 AL422B 作为先入先出(FIFO),当一帧图像缓存完后,STM32才将这一帧图像写入显存或暂存到内存中。
基于STM32的可穿戴设备系统毕业设计说明书(可穿戴设备系统)

2016届毕业生毕业设计说明书题目: 基于STM32的可穿戴设备系统院系名称:学生姓名:指导教师:2016年05月16日摘要“可穿戴设备”是可穿戴技术在日常穿戴产品的设计中的应用,例如手表、眼镜、服装、鞋和手套。
广义的可穿戴设备是指功能全、尺寸大,不依赖于智能手机,实现了智能手机全部或部分功能,如智能手表和智能眼镜等,以及只专注于某一类型的应用功能,需要和其它设备如智能手机配合使用,如各类进行体征监测的智能手环、智能首饰等。
随着技术的进步以及用户需求的变迁,可穿戴式智能设备的形态也在不断的变化。
穿戴式技术在国际计算机学术界和工业界一直都备受关注,只不过由于造价成本高和技术复杂,很多相关设备仅仅停留在概念领域。
本系统以意法半导体公司的基于Cortex-M3 32位高性能单片机STM32F103ZET6为核心,由GSM模块、GPS模块、MPU6050六轴加速度传感器模块、TFT彩屏、SD卡等组成了一个可穿戴设备系统。
该系统实现了万年历、秒表、计步、闹钟、画板、日历、地图等功能。
地图获取的图片存放在SD卡中,GUI图片存放在8M的外置FLASH当中。
系统支持全触摸操作。
关键词:可穿戴设备;STM32单片机;TFT彩屏;文件系统;SD卡;GPS地图Title The Wearable Device System Based on the STM32 Abstract"The wearable devices" is the application of the Wearable Technology in the Daily wearable Product Design, such as the glasses, gloves, watches, clothes and shoes. Generally,The wearable smart devices including full-featured, large size, do not rely on smart phones to achieve a complete or partial functions, such as smart watches and smart glasses, etc., and only focus on a certain type of application functions, and other devices such as smart phones with the use of various types of conduct such as signs monitoring bracelet intelligent, smart jewelry. As technology advances and the change of user needs, application forms of wearable smart devices are constantly changing. Wearable computer technology has attracted wide attention in the international academia and industry, but due to the high construction cost and technical complexity, a lot of related equipment only is an idea. This system is based on the STM32F103ZET6 as the core which is produced by the STMicroelectronics Cortex-M3 32-bit high performance microcontroller,This system also use GSM module, GPS module, MPU6050 six-axis acceleration sensor module, TFT color screen, SD card and other components.The system has six functions such as the calendar, stopwatch, pedometer, alarm clock, Sketchpad, Calendar, Maps, and other functions. Map Get pictures stored in the SD card, GUI image stored in the external 8M FLASH.The system supports full-touch operation.Keywords: Wearable device; STM32 microcontroller;TFT color screen;The file system; SD card; GPS maps目次1 绪论........................................................ - 1 -1.1选题背景 (1)1.2国内外研究现状及意义 (1)2 设计要求.................................................... -3 -3 方案论证.................................................... - 4 - 3.1控制器方案 (4)3.2显示模块方案 (5)3.3加速度传感器方案 (5)4 硬件部分.................................................... - 6 - 4.1单片机. (6)4.2TFT彩屏 (9)4.3触摸屏控制芯片 (11)4.4MPU6050模块 (12)4.5SD卡 (14)4.6EEPROM存储器24C02 (15)4.7FLASH芯片W25Q64 (16)4.8蜂鸣器电路 (17)4.9GPS模块 (17)4.10GSM模块 (19)5 软件部分................................................... - 21 - 5.1开发工具介绍 (21)5.2程序框图 (21)5.3文件系统的移植 (22)5.4GUI程序的设计 (24)5.5主要功能的实现原理 (25)6 系统功能测试与分析......................................... - 38 -6.1开机主界面测试 (38)6.2万年历功能测试 (38)6.3秒表功能测试 (39)6.4闹钟功能测试 (40)6.5画板功能测试 (41)6.6计步功能测试 (41)6.8测试结果分析 (42)结论......................................................... - 45 - 致谢......................................................... - 46 - 参考文献..................................................... - 47 - 附录一:系统电路原理图....................................... - 48 - 附录二:部分源程序........................................... - 52 -1 绪论1.1选题背景随着科技的进步,用单片机开发的智能化产品在各个领域得到广泛地应用,它极大地提高了社会生产力水平。
基于stm32的超声波测距系统
基于stm32的超声波测距系统相比于传统的单片机,STM32单片机具有更高的时间测量分辨率,其主频与定时器频率高达72MHz,且该单片机在开启定时器的同时,会启动PWM通道驱动超声波发射器和通道捕捉回波信号,提高了测量的精度和准确性。
超声波测距是一种典型的非接触测量方式,在不同的传播介质中具有不同的传播速度其系统结构简单、成本低。
只有了解超声波测距的原理、了解STM32单片机才能设计出性能良好的STM32单片机的高精度超声波测距系统。
超声波测距的原理及检测方法超声波检测技术是基于非接触测量方式而逐渐发展起来的一门技术,这种非接触测量方式会经常出现在材料学、电子科学、测量学等学科当中。
超声波的产生是通过机械振动而得到,其传播速庶会随着传播介质的变化而变化。
超声波测距的实现主要是通过超声波的产生、传播与接收回波这三个主要过程。
目前,声波幅值检测法、渡越时间检测法和相位检测法是超声波测距的三种主要检测方法。
声波幅值检测法,容易受到传播介质的干扰,所以其测量精度较差。
渡越时间检测法,与其他两种检测方法相比,成本较低,测量范围较广,且实现简单,因此本文高精度超声波测距系统的设计决定采用渡越时间检测法。
相位检测法,在实际测量过程中,其测量精度要高于其他两种检测方法,但测量范围具有一定的局限性田。
STM32单片机的高精度超声波测距系统设计一、系统组成STM32单片机的高精度超声波测距系统的设计主要由STM32 单片机、超声波发射电路、接受电路、补偿电路和软件等构成。
该系统将STM32单片机作为整个系统的核心,通过协调各部分电路工作,进而实现高精度的超声波测距口。
二、系统硬件设计1.超声波发射电路超声波发射电路两个最主要的组成部分就是超声波探头和超声波激励电路。
超声波探头不仅是超声波发射电路的一个重要组成部分,更是整个超声波测距系统的重要组成部分。
它是超声波测距系统中用以发射或接受超声波信号的主要器件。
超声波激励电路的基本工作原理是首先利用相应的机理信号对一特定形式的电压进行处理之后,将其加载到超声波探头上,然后再通过超声波探头压电晶片将其自身所具有的电能转化为超声波信号图。
基于STM32单片机的高精度超声波测距系统的设计

基于STM32单片机的高精度超声波测距系统的设计基于STM32单片机的高精度超声波测距系统的设计1. 引言超声波测距技术是一种常用的非接触性测量技术,具有测量范围广、分辨率高等优点,广泛应用于工业自动化、无人驾驶、智能家居等领域。
本文旨在设计一种基于STM32单片机的高精度超声波测距系统,以满足快速、准确、可靠的测距需求。
2. 系统设计2.1 硬件设计超声波测距系统主要由超声波发射器、接收器和信号处理模块组成。
其中,超声波发射器用于发射超声波信号,接收器用于接收反射回来的超声波信号,信号处理模块用于处理接收到的信号并计算出测距结果。
2.2 超声波发射器超声波发射器采用压电陶瓷传感器作为能量转换元件,通过驱动电路将驱动信号转化为超声波信号并发射出去。
为了实现高精度的测距,超声波发射器需要具备较高的频率响应和较窄的方向性。
2.3 超声波接收器超声波接收器采用同样的压电陶瓷传感器作为能量转换元件,利用其能够将接收到的超声波信号转化为电信号。
为了实现高灵敏度的接收,超声波接收器需要具备较高的响应灵敏度和较低的噪声。
2.4 信号处理模块信号处理模块采用STM32单片机作为核心处理器,通过多通道模数转换器(ADC)将接收到的电信号转化为数字信号。
然后,通过数字信号处理算法对信号进行滤波、增益控制和时域分析等操作。
最后,利用测量原理计算出测距结果,并将结果显示在液晶显示器上。
3. 系统工作原理3.1 发射信号超声波发射器以一定的频率发射超声波信号,信号经过传播并与目标物体相互作用后,被目标物体反射回来。
3.2 接收信号超声波接收器接收到反射回来的超声波信号,并将其转化为电信号。
信号经过放大、滤波等处理后,送入信号处理模块。
3.3 信号处理信号处理模块使用STM32单片机对接收到的信号进行处理。
首先,通过ADC转化为数字信号。
然后,进行信号滤波,去除噪声和回波干扰。
接着,采用增益控制技术,对信号进行放大或衰减,以适应不同距离的测量需求。
基于STM32单片机的金属物体探测定位器系统的设计与实现
Abstract:The inductive digital senor LDC1000 was used as the probe in the meta l object detection a nd locating 转 换 器 LDC1000为 目标 区域 金 属 物 体 探 测 定位 系统 的 探 头 ,为 感 测 系统 的 设 计 提 供 了低 功 耗 、
小封装 、低成本 的解决方案。设计的金属物体探 测定位 器基 于 STM32单片机 为核心微控 器,以 LDC1000传 感器为无线遥
控 小车的探 头 ,通过 扫描 探测 目标 区域 的金属 物体 ,当 LDC1000传感器在水 平或者垂直距 离检测 、运动检 测、金 属成分检
测 (合金检测 )到被 测物体 时,串行外设接 口 (SPI)将获取的检测信号传递 给微控 制器处理 ,通过 外围的声光 电路 指示 ,定
位金属 物体 的 实际位置 。该装 置适 用性强、检 测技 术稳定、性价 比高 ,可以应 用在 汽车、消费电子 、计算机 、工业 、通信和 医
2016拄
第 4期
仪 表 技 术 与 传 感 器
Instrument Technique and Sensor
2016 No.4
基 于 STM32单片 机 的金 属 物体 探测 定 位 器 系统 的设 计 与 实现
李艳 红 ,李 自成 ,孙仕 琪
(1.武 汉 工 程 大 学 邮 电 与信 息 工 程 学 院 ,湖 北 武 汉 430070;2.武 汉 工 程 大 学 电气 学 院 。湖 北 武 汉 430070)
stm32激光测距毕业设计__概述说明以及解释
stm32激光测距毕业设计概述说明以及解释1. 引言1.1 概述本篇长文介绍了关于stm32激光测距毕业设计的概述和说明。
激光测距技术作为一种精确测量目标距离的方法,在各个领域广泛应用。
通过将stm32微控制器与激光传感器相结合,可以实现高精度、快速且稳定的距离测量。
本文将详细介绍这一毕业设计项目的背景、设计要点以及硬件与软件平台选择。
1.2 文章结构本文分为五个部分进行论述。
引言部分主要对整个文章进行概述说明,以便读者能够有一个清晰的认识和理解。
第二部分将介绍stm32激光测距毕业设计的背景以及相关的设计要点,并探讨硬件与软件平台选择问题。
第三部分将详细阐述激光测距原理和技术,并解释stm32如何与激光传感器进行通信。
第四部分将详细叙述整个设计实现过程,并提供关键问题的解决方案,包括硬件设计流程和软件设计流程。
最后一部分是结论与展望,对实验结果进行分析总结,并提出存在问题的改进方向和对毕业设计的建议性意见。
1.3 目的本文的目的是为读者提供一个全面、系统的介绍和解释,使其能够深入了解stm32激光测距毕业设计的背景、原理以及实现过程。
通过对硬件设计和软件设计的流程以及关键问题解决方案进行详细说明,帮助读者理解整个项目的开发过程和技术要点。
最后,结合实验结果和总结评价,给出存在问题的改进方向和对毕业设计的建议性意见。
该篇长文旨在为相关领域研究人员提供有用的参考和指导,促进激光测距技术在更广泛范围内的应用与推广。
2. stm32激光测距毕业设计:2.1 背景介绍:在现代技术中,激光测距技术在很多领域得到广泛应用,例如自动驾驶、机器人导航、工业检测等。
本文旨在设计并实现一套基于STM32的激光测距系统,通过该系统可以准确、快速地测量目标物体的距离。
2.2 设计要点:针对激光测距系统的设计,我们需要考虑以下几个关键要点:- 精确性:设计一个精度高、误差小的激光测距系统是非常重要的。
在选择硬件和实施软件算法时要注重精确性。
基于STM32单片机的北斗GPS双模定位系统设计及测试

2021年第1期信懇与电胭China Computer & Communication获件开成与雇用基于STM32单片机的北斗/GPS双模定位系统设计及测试苏日古格于新海•国芳王睿聪(河套学院机电工程系,内蒙古巴彦淖尔015000)摘要:本文采用高性能STM32单片机作为控制系统,通过北斗/GPS双模定位模块及有源天线采集定位数据,并用 上位机显示PVT信息,最终实现了成本低、延展性强、可广泛应用的双模定位系统。
通过外场测试验证发现,该系统的 定位精度较高,具有较强的实用性。
关键词:测试;北斗/GPS;STM32单片机中图分类号:U463. 6 文献标识码:A文章编号:1003-9767 (2021) 01-123-03Design and Test of Beidou/GPS Dual-mode positioning System Based onSTM32 Single Chip MicrocomputerSU Riguge,YU Xinhai*,GUO Fang,WANG Ruicong(Department o f M echanical and E le ctrica l Engineering,Hetao U niversity,Bayannaoer Inner M ongolia015000, China)A b s tra c t:This article uses high-perform ance STM32 sin g le-c h ip m icrocom puter as the control system,collects positioning data through the Beidou/GPS dual-m ode positioning module and active antenna,and uses the host computer to display PVT inform ation, and fin a lly achieves low-cost,strong scalab ility,and w idely applicable dual-m ode positioning system.Through fie ld test verification, it is found that the system has high positioning accuracy and strong pra c tic a b ility.K e y w o rd s:test;Beidou/GPS;STM32 m icrocontroller〇引言北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)是中国自行研制的全球卫星导航系统,也是继GPS、GLONASS之后的第3个成熟的卫星导航系统。
基于STM32的PT100温度测量
基于STM32的PT100温度测量目录一、前言 (1)二、系统描述 (1)2.1 综述 (1)2.2 系统框图 (1)2.3 功能实现 (1)三、硬件设计 (2)3.1 STM32 微控制器 (2)3.2 PT100温度传感器电路 (3)3.3 1602液晶屏 (4)四、软件设计 (4)4.1 ADC程序 (4)4.2 1602LCD显示程序 (5)4.3 主程序 (5)五、性能测试 (5)六、课程设计心得 (6)参考文献 (6)附录1:系统实物图 (7)附录2:系统主要程序 (7)一、前言Cortex-M3 是 ARM 公司为要求高性(1.25DhrystoneMIPS/MHz)、低成本、低功耗的嵌入式应用专门设计的内核。
STM32 系列产品得益于 Cortex-M3 在架构上进行的多项改进,包括提升性能的同时又提高了代码密度的 Thumb-2 指令集和大幅度提高中断响应的紧耦合嵌套向量中断控制器,所有新功能都同时具有业界最优的功耗水平。
本系统是基于 Cortex-M3 内核的 STM32 微控制器与PT100温度传感器的温度测量,在硬件方面主要有最小系统板、1602LCD 液晶屏以及PT100温度传感电路,在软件方面主要有 1602LCD 液晶屏的驱动,ADC 功能的驱动,及滤波算法设计。
整个设计过程包括电子系统的设计技术及调试技术,包括需求分析,原理图的绘制,器件采购,安装,焊接,硬件调试,软件模块编写,软件模块测试,系统整体测试等整个开发调试过程。
二、系统描述2.1综述本系统是基于 STM32微控制器所设计的多功能画板,该画板具有基本的绘画功能及画布颜色的选择,触摸屏校正等功能。
整个系统模块分为三个模块:ALIENTEK MiniSTM32开发板、液晶显示。
MiniSTM32开发板是ALIENTEK 开发的是一款迷你型的开发板,小巧而不小气,简约而不简单。
上面有芯片工作需要的资源,时钟控制电路、复位电路、JTAG 控制口以及与外围电路相连的接口。
基于STM32的PT100温度测量

基于STM32的PT100温度测量目录一、前言 (1)二、系统描述 (1)2.1 综述 (1)2.2 系统框图 (1)2.3 功能实现 (1)三、硬件设计 (2)3.1 STM32 微控制器 (2)3.2 PT100温度传感器电路 (3)3.3 1602液晶屏 (4)四、软件设计 (4)4.1 ADC程序 (4)4.2 1602LCD显示程序 (5)4.3 主程序 (5)五、性能测试 (5)六、课程设计心得 (6)参考文献 (6)附录1:系统实物图 (7)附录2:系统主要程序 (7)一、前言Cortex-M3 是 ARM 公司为要求高性(1.25DhrystoneMIPS/MHz)、低成本、低功耗的嵌入式应用专门设计的内核。
STM32 系列产品得益于 Cortex-M3 在架构上进行的多项改进,包括提升性能的同时又提高了代码密度的 Thumb-2 指令集和大幅度提高中断响应的紧耦合嵌套向量中断控制器,所有新功能都同时具有业界最优的功耗水平。
本系统是基于 Cortex-M3 内核的 STM32 微控制器与PT100温度传感器的温度测量,在硬件方面主要有最小系统板、1602LCD 液晶屏以及PT100温度传感电路,在软件方面主要有 1602LCD 液晶屏的驱动,ADC 功能的驱动,及滤波算法设计。
整个设计过程包括电子系统的设计技术及调试技术,包括需求分析,原理图的绘制,器件采购,安装,焊接,硬件调试,软件模块编写,软件模块测试,系统整体测试等整个开发调试过程。
二、系统描述2.1综述本系统是基于 STM32微控制器所设计的多功能画板,该画板具有基本的绘画功能及画布颜色的选择,触摸屏校正等功能。
整个系统模块分为三个模块:ALIENTEK MiniSTM32开发板、液晶显示。
MiniSTM32开发板是ALIENTEK 开发的是一款迷你型的开发板,小巧而不小气,简约而不简单。
上面有芯片工作需要的资源,时钟控制电路、复位电路、JTAG 控制口以及与外围电路相连的接口。
基于STM32的雷达物位检测系统设计

基于STM32的雷达物位检测系统设计陈阿辉;黄继伟;柯玉山;邱菁【摘要】该文设计了一款雷达物位检测系统,用于检测工业场合大型罐体或储料仓的物料存储高度.该系统以STM32F407作为信号处理和控制的核心,通过ADC接口对雷达收发模块的差频输出信号进行数据采样,并对数据做FFT+Chirp-Z联合算法处理.系统根据计算得到的测距信息判断当前物位是否到达警戒物位,以及是否输出报警信号.该物位检测系统可以满足实际应用要求,并且结构简单,测距精度高.%A radar level detection system is designed to detect the height of material storage in large scale tanks or storage silo in the industrial occasions.This system takes STM32F407 as the core of signal processing and control,the data sampling of the differential frequency output signal of the radar transceiver module is realized by ADC interface,and the data are processed by FFT+Chirp-Z algorithm.According to the calculated distance information,the system judges whether the current level reaches the alert level and whether the alarm signal is output.The system meets the requirements of practical application,and has the characteristics of simple structure and high precision.【期刊名称】《自动化与仪表》【年(卷),期】2017(032)006【总页数】5页(P28-31,38)【关键词】物位检测;STM32F407;数据采样;FFT+Chirp-Z联合算法【作者】陈阿辉;黄继伟;柯玉山;邱菁【作者单位】福州大学物理与信息工程学院,福州350116;福州大学物理与信息工程学院,福州350116;福州大学物理与信息工程学院,福州350116;福州大学物理与信息工程学院,福州350116【正文语种】中文【中图分类】TP216;TB921物位检测仪表是在工业中广泛应用的智能测量仪表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第一章绪论1.1概述1.1.1研究现状在地质勘探或是油田勘探的过程中,常会用到地震勘探。
爆炸震源是地震勘探中广泛采用的非人工震源。
虽然目前已发展了重锤、连续震动源、气动震源等一系列地面震源,但陆地地震勘探经常采用的重要震源仍为炸药。
炸药安放的过程中需要测量起爆电缆的长度,准确的测定线路的长度是勘探顺利进行的前提和保证。
但是由于炸药安放在地面下的竖井中,难以直接测量线缆的长度。
目前勘测中常使用的方法是利用电阻表测量电缆的电阻值,再通过换算得出导线的长度。
测量过程中需要人工对测量结果进行换算和记录,不仅增加了勘探的工作量,在换算和记录过程中还容易产生错误。
在地址勘测中,勘测地点往往都在野外,缺乏固定的标记物和指示。
尤其在密林和荒漠等环境中,必须借助仪器来定位。
目前最常用定位仪器通常都要使用到GPS。
GPS是Global Positioning System(全球定位系统)的缩写,是美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
该系统的建立从根本上解决了人类在陆地、海洋、航空、航天等各个方面的导航和定位问题, 具有很高的实用价值。
在电力系统通信和电力系统自动化等领域也有广泛的应用。
当初,设计GPS系统的主要目的是用于导航,收集情报等军事目的。
但是,后来的应用开发表明,GPS系统不仅能够达到上述目的,而且用GPS卫星发来的导航定位信号能够进行厘米级甚至毫米级精度的静态相对定位,米级至亚米级精度的动态定位,亚米级至厘米级精度的速度测量和毫微秒级精度的时间测量。
因此,GPS系统展现了极其广泛的用途。
用GPS信号可以进行海、空和陆地的导航,导弹的制导,大地测量和工程测量的精密定位,时间的传递和速度的测量等。
对于测绘领域,GPS卫星定位技术已经用于建立高精度的全国性的大地测量控制网,测定全球性的地球动态参数;用于建立陆地海洋大地测量基准,进行高精度的海岛陆地联测以及海洋测绘;用于监测地球板块运动状态和地壳形变;用于工程测量,成为建立城市与工程控制网的主要手段。
用于测定航空航天摄影瞬间的相机位置,实现仅有少量地面控制或无地面控制的航测快速成图,导致地理信息系统、全球环境遥感监测的技术革命。
自从海湾战争中美军成功地使用了全球定位系统(GPS)后,GPS卫星导航技术及相关产品就成为全球军队武器装备追逐的对象。
与此同时,具有定位、测量、授时等功能的GPS技术被更多的行业所接受和采用,随着信息产业和现代交通工具的发展,GPS技术更渗透于工作与生活的各个方面。
近年来,水利事业中也频繁地应用到这项技术。
应用于水利部门,导航仪可以为防汛抗洪的指挥工作提供极大的方便和帮助。
大水之年,受灾地区已是水天一片,公路被淹没,通迅设施被冲毁,如何在没有任何参照物的情况下,将大量抢险物资运送到指定地点,将紧急救援人员准确调动到前线,"多用途卫星导航定位仪"可以担此重任。
它能为救援工作提供指导行进的电子地图,救援人员根据电子地图自行导航,借助卫星定位技术和电子地图显示自行判读,明确自己现在的地理位置和到达目的地的距离及所需时间。
为保障迅速到达目的地,救援人员还可以在电子地图中预设行进路线,并在重要的位置进行标定,当沿自选的路线行动,发生偏航时系统全自报警,保证正确地行动。
当前,对目的地及周边环境的查询需求带动了GPS导航市场的繁荣。
据相关统计,欧美国家导航设备普及率达到90%,日本更是超过95%。
一项对3G应用的展望和创意的专业调查显示,17.79%的被调查者选择了3G网络视频对话,15.34%的被调查者选择了GPS/地图搜索,在3G时代来临之际,人们对GPS/电子地图的关注,足以显现它对日常生活中的重要性。
2005年,我国民用汽车保有量就达到了3160万辆,但是装载导航设备的车辆,还不足2%。
尽管不少汽车厂家对其高端车型在出厂前就安装了导航系统,对其他低端车型也会有选装导航产品的服务,但价格不菲的车载导航仪让不少买车的人放弃了实用性很强的导航配置。
按照私人汽车拥有量年均增速20%测算,对导航产品的需求也是一个很大的增量。
1.1.2研究内容目前使用的导航仪或全站仪等仪器中大都带有GPS功能,但在地震勘测过程中,寻找的目标是事先安装好导线的目标,坐标是已知的,并不需要十分精确的目标定位,只需引导使用者找到目标即可。
因此使用全站仪之类的仪器虽然精度高,但是由于使用复杂,且使用者需要进行专门的培训,给勘测带来诸多不便。
而一般的导航仪采用的是电子地图导航,需要公路或其他标志物作为参考,显然不适合野外使用。
另外,由于仪器功能单一,使用者不得不携带多种仪器,更加重了使用者的负担,降低了工作的效率。
为解决上述问题,本设计将线路测量系统和导航系统集成在一起,并且在测量电阻的基础上增加了自动线长换算、换算参数标定和存储功能。
同时,系统在测量线长时会自动记录下测量点的坐标,系统可以通过手动输入坐标或调用系统内已存的坐标指引使用者到达目标点。
在实现功能的同时尽量减小使用的复杂程度,降低使用者的工作量。
第二章系统总体设计2.1功能分析本设计将导航仪和线路测量系统集成在一起,基本功能为两者功能的结合。
即线缆电阻测量和系统导航。
根据使用场合分析,由于系统测量的电缆为连接有雷管的起爆电缆,电流过大会造成危险。
根据工业电雷管的国家标准GB 8031—2005中规定电雷管的安全电流为0.18A,设计测量电流应远小于0.18A。
系统自动将测量得到的电阻换算成为线缆长度,由于线缆的长度不同将会导致换算系数的变化,系统需在更换线缆材料时能够对换算系数进行标定。
进行导航需了解系统本身的坐标和目标点的坐标。
系统本身的坐标需通过GPS定位实现,目标点的坐标可以通过手动输入,也可以通过选择系统曾经测试过的坐标点。
综上所述系统设计功能为:1.测量电缆电阻;2.测量电流不超过50mA;3.自动将电阻换算为长度;4.测量数据存储;5.换算系数标定;6.显示系统的GPS坐标;7.输入坐标定点导航;8.GPS坐标存储;9.存储坐标定点导航。
2.2方案选择2.2.1线路测量方案导线长度测量,主要用于各种电力电缆或电信电缆,为了找出适用于本设计的长度测量方法,有必要对己知的线路故障定位方法进行分析。
电力电缆故障探测的方法最早是在二战前提出的,发展至今己经出现了诸如:电桥法、驻波法等经典理论方法,以及五十年代的低压脉冲法、七十年代的脉冲电压法、八十年代的脉冲电流法等现代行波法。
下面简要介绍各种测量方法的原理,以便分析各种方法的优劣,分析更适合测量导线的长度的方法。
1.电桥法单相接地故障是最常见的电缆故障之一,通常占各类故障的总和的90%,传统的测试是用电桥法。
由于同一性质的单相接地故障,它的接地电阻可以从几欧姆至兆欧级,因此可用的电桥也稍有差别,但其原理均相同。
电桥法的基本原理和基本接线如图2-1所示。
图2-1 电桥法及接线当电桥平衡后,故障点距离用式(2-1)进行计算。
2122R X L R R =⨯+ (2-1) 其中,X -故障点距离(m); L -电缆线路长度(m);R1-电桥固定臂读数; R2-电桥可变臂读数。
用电桥法测试故障点的精确性与接地电阻值有关。
接地电阻值越小测试精度越高。
为达到可能高的精确度,常用大电流烧断接地电阻。
但接地电阻不宜过小,因为烧断接地电阻需要一定时间,也不利于其后的定点实验。
接地电阻为千欧数量级是最为理想的,其精确度可小于0.1%。
为了消除电桥法中临时引线带入的误差,除了将电桥接到电缆的二根引线轮换测试外,还应在电缆的另一侧进行重复测试。
经验表明在近故障点一侧测试的故障点距离比远离一侧的精度要高。
电桥法的优点是简单,方便,精确度高,但它的主要缺点是不适用于高阻故障、闪络性故障,因为故障电阻很高的情况下,电桥里电流很小,一般灵敏度的仪器,很难探测。
但是,实际上故障大部分是属于高阻与闪络性故障。
这样在使用电桥法测距之前,需用高压设备将故障点烧穿,使故障点电阻降到可用电桥测量的范围内。
而故障点烧穿是件十分困难的工作,往往要花费数小时,甚至几天的时间,十分不方便,有时会出现故障点烧断,故障电阻反而升高的现象,或是故障电阻烧得太低,呈永久短路,以至于不能用放电声测法进行最后定位。
电桥法的另一缺点是需要知道电缆的准确长度等原始技术资料,当一条电缆线路内是由导体材料或截面不同的电缆组成时,还要进行换算,电桥法还不能测量三相短路或断路故障。
随着新技术的不断进步,现在现场上电桥法用得越来越少。
2.低压脉冲反射法低压脉冲反射法主要用于低阻和断线故障测距。
是应用脉冲行波和时间成线性关系的原理,因此和电缆线路的结构无关,只要绝缘介质均匀,就可方便地检测故障范围。
它的原理及发射和断路反射波形如图2-2所示:图2-2 低压脉冲反射法院里及波形基本方法是首先向电缆导线首阶跃电压或脉冲电压),通过测量入进行测距,见式(1-2):(2-2)其中L为故障距离,为入射行波和反射行波之间的时间差,v为行波在电缆中的传播速度。
该方法简单直观,不需要知道电缆的准确长度,根据脉冲反射波还可以识别电缆接头与分接点的位置,测试简单,操作容易,且精度高。
该方法可用于电缆低阻和断路故障测距或用于电缆全长测量,这类故障占所有电缆故障的10%,在电缆故障测试中占有举足轻重的作用。
脉冲反射法中识别故障点的反射波和区别由其它由于不均匀性造成的反射波,如电缆接头反射波,是测试技术的关键。
反射波的幅值主要决定于故障点电阻对波阻抗之比。
接地故障的电阻对波阻抗之比(Rf/Z0)大于10时,反射波幅值只是等于或小于脉冲起始波的5%,而多数接地故障的测试局限了脉冲反射法的应用。
而断线故障由于断线电阻较大,可得几乎100%的反射波幅值,因此脉冲反射波法特别适用于断线故障。
3.脉冲电压法脉冲电压法,又称闪测法。
此方法实际上是行波法离线故障测距的一种形式。
此方法是70年代发展起来的用于测量高阻与闪络故障的方法。
该方法首先将电缆故障在直流或脉冲高压信号下击穿,然后通过记录放电脉冲在测量点与故障点往返一次所需的时间来测距。
脉冲电压法的一个重要优点是不必将高阻与闪络性故障烧穿,直接利用故障击穿产生的瞬间脉冲信号,测试速度快,测量过程也得到简化,是电缆故障测试技术的重大进步。
就大部分故障本质来说,基本都属于绝缘体的损坏。
高阻故障是由于绝缘介质的抗电强度下降所致。
因为故障点的阻值高,测量电流小,所以即使用足够灵敏的仪表也难以测量。
对于脉冲法,由于故障点等效阻抗几乎等于电缆特性阻抗,所以反射系数几乎等于零,因得不到反射脉冲而无法测量。
但从介质的电击穿现象出发,只要对电缆加足够高的电压(当然低于最高试验电压)故障点就会发生击穿现象。