《材料成型金属学》教学资料:2012期中
材料成型金属学
材料成型金属学是一门涉及金属材料成型过程的学科,主要研究金属材料的凝固、成型、冷却和性能等方面的理论和实践。
这个领域的研究和实践对于制造行业、航空航天、汽车、能源等领域具有重要意义。
材料成型金属学的主要研究内容包括:
金属的凝固和成型:研究金属的液态和固态相变过程,以及金属的塑性变形、流变性能等方面的理论和实验研究。
金属的冷却和性能:研究金属材料的冷却过程、热处理工艺、显微组织结构与性能之间的关系,以及材料的强化机制等方面的理论和实验研究。
金属材料的加工和制造:研究金属材料的加工和制造技术,包括铸造、锻造、焊接、轧制等工艺过程,以及材料的加工性能和制造成本等方面的理论和实验研究。
金属材料的应用:研究金属材料在不同领域的应用,包括航空航天、汽车、能源、建筑等领域,以及材料的可靠性和寿命等方面的理论和实验研究。
总的来说,材料成型金属学是一门涉及多个学科领域的综合性学科,它的研究和应用对于提高产品质量、降低成本、提高材料利用率等方面都具有重要意义。
材料成型金属学6-8

Stress
流变应力随溶质浓度的变化
0
0
kcm
-合金的流变应力;
o
-
纯金属的流变应力;
½
-cm
4.分散强化
位错切过第二相质点.
位错-第二相粒子
位错绕过第二相质点
8.2 强韧性能控制
钢铁材料/铝合金的组织性能控制
控制控冷工艺示意图
控制轧制控制冷却
Al-8%Mg合金
451ºC 340ºC
冷变形金属加热时的软化过程:
回复
再结晶
晶粒长大
t0 回 t1 复
再结晶
t2 晶粒长大t3
New equiaxed and strain-free grains
组织性能变化
i) 回复 ii) 再结晶 iii)晶粒长大
再结晶形核机制
• 亚晶聚合 伴随着亚晶长大
ABC间位相差很小 A和B合并 ABC合并,形成大位相差界面
高位错密度晶界迁移,亚晶长大, 成为再结晶的晶核.
变形程度较小时,大角度晶界上有一 小段弓出,晶界扫过的区域储存能释 放,可以作为再结晶晶核而长大。
-晶界弓出
再结晶形核的驱动力
再结晶晶粒与变形基体之间的应变能之差
表面能↑
应变能↓
晶粒长大的驱动力
界面能的降低
异常晶粒长大 —二次再结晶
原因:第二相、杂质溶入基体金属中, 晶界迁 移长大;或者再结晶织构中,个别晶粒位向差 大, 易于迁移 →异常长大。
韧性断裂特点:
(1)断裂前发生较大塑性变形→高能量吸 收过程.
(2)裂纹产生 →扩展.→聚合
生成新裂纹→多裂纹源
(3)裂纹扩展临界应力>裂纹形核应力→缓 慢过程
【材料成型金属学】第4章

消除或减小接触摩擦对变形的影响可采取的措施:
1)试样端部涂润滑剂,加柔软垫片等;
2)适当增大H/d值,但不能使H/d>2~2.5,否则压缩过程中试样易 弯曲而使压缩不稳定。
3.扭转试验法
在圆柱体试样的两端加以大小相等、方向相反的转矩M,在此作用下试 样产生扭转角φ。在试验中测定φ值。 应力状态:纯剪切。但此应力状态的分布不均匀:
C.U.帕特涅尔拉伸试验:加以220MPa的径向应力可使变形抗力 和塑性明显升高。
静水压力: 金属的变形抗力在很大程度上取决于静水压力.静水压力从0增加到 5000MPa时,变形抗力可增加一倍.
静水压力有明显影响的情况: 1)金属合金中的已有组织或在塑性变形过程中发生的组织转变有脆
性倾向。 2)金属合金的流变行为与粘-塑性体行为相一致。(在一定温度-速
变形的能力。 在所设定的变形条件下,所研究的变形物体或其单元体能够实现塑性
变形的应力强度。 变形抗力与变形力数值相等,方向相反. 不同金属材料变形抗力不同.
• 金属塑性加工过程都是复杂的应力状态,同一金属材料,变形抗力比 单向应力状态大得多。
• 实际测试的变形抗力P= σs +q
•
σs材料在单向应力状态下的屈服应力
2)形成化合物 3)形成第二相组织,使σS增加。
间隙固溶强化
C、N等溶质原子嵌入 α-Fe晶格的八面体间隙中, 使晶格产生不对称正方性 畸变造成强化效应.铁基体 屈服强度随间隙原子含量 增加而变大.
铁的屈服应力和含C量的关系
• 碳:在较低温度下随钢中含碳量的增加,钢的变形抗力升高,温度升 高时影响变弱.低温时影响远大于高温时.
4.1.2 变形抗力的测定方法
条件:简单应力状态下,应力状态在变形物体内均匀分布 拉伸试验法: 压缩试验法 扭转试验法
《材料成型金属学》习题

《材料成型金属学》习题
一、名词解释(5+5)
1柯氏气团
金属晶体中固溶原子与位错战交互作用,使固溶原子大量聚集在位错规附近,形成“原子云”或“原子气团“钉扎”位错线,这种“原子云”或“原子气团”,以其发现者柯垂尔命名,称为“柯氏气团”.
2双交滑移
金属晶体中的螺型位错滑格受到阻碍时,会转移到与阻滑移面相邻的滑移面上滑移,称为交滑移.当位惜乂重新找移到与最初滑移面平行的滑移而上时,称为双交滑移.
二、判断对错(如有错误,清改正)(5+5)
I当力型位错b滑过滑移面,滑移面两侧晶体会相对移动∣b∣,大量位错滑动,会引起宏观塑性变形(如:滑移台阶)。
因此,金属宏观塑
性变形后,晶体内的位错密度会降低。
(错,金用宏观空性变形后,内部位错定度增加)
2位错的线张力是位错能的一种表现形式,位错线弯曲程度越大,张
力越大,因此,当位错呈直线状态时,位错线张力为零。
(错,向心回复力为零,规张力不为零》
三、简答题:(5+5+5)
1简述金属晶体中的缺陷种类
答:1)点缺陷,即等维缺陷,如:空位、间隙固溶原子、置换固溶原子等:
2)线缺陷.即I维缺陷,如:位惜:
3)面缺陷,即2雄缺陷,如:晶界、亚晶界等
2金属晶体中位错反应的木质是什么?
答:1)位错反应是位燃引起的同变区域的松弛或集中:
2〉位错反应於晶体内部内能降低趋于稳定的结果。
《材料成型金属学》教学资料:1-4 位错的应力场和应变能
(4)当y=0时,σxx=σyy=σzz=0,说明在滑移面上,没有正应力,
只有切应力,而且切应力τxy 达到极大值 。
(5)y>0时,σxx<0;而y<0时,σxx>0。这说明正刃型位错的位错 滑移面上侧为压应力,滑移面下侧为拉应力。
位错的能量通常分为位错中心区的能量与中心以外 区域的能量两部分。
中心以外区域的能量为弹性能,占能量的绝大部分 通常以位错的弹性能代表位错的能量。
假设其为一个单位长度位错线,为造成这个位错克服切应力 τθr所做的功为单位长度刃型位错的应变能:
进一步简化得单位长度位错的总应变能:
1.位错的能量包括两部分:Ec和Ee。 2.位错的应变能与G和b2成正比。
3.
,常用金属材料的约为1/3,故螺型位错
的弹性应变能约为刃型位错的2/3。
4.位错的存在均会使体系的内能升高,使晶体处于 高能的不稳定状态,位错是热力学上不稳定的晶 体缺陷。
3.位错的线张力 line tension
位错应变能与位错线长度成正比。为降低能量, 位错线具有尽量缩短其长度的倾向,从而使位错产
2. Tension be1)同时存在正应力分量与切应力分量,而且各应力分量的 大小与G和b成正比,与r成反比,即随着与位错距离的增大, 应力的绝对值减小。
(2)各应力分量都是x,y的函数,而与z无关。这表明在 平行于位错的直线上,任一点的应力均相同。
(6)在应力场的任意位置处, 。
(7)x=±y时,σyy,τxy均为零,说明在直角坐标的两条对角线处, 只有σxx,而且在每条对角线的两侧,τxy(τyx)及σyy的符号相反。
2.位错的应变能
安徽工业大学 材料成型专业课《金属学》题库答案——填空题
29.在铁碳合金中,含三次渗碳体最多的合金成分点为 P 点 ,含二次渗碳体最多的合金成 分点为 E 点 。 30.珠光体是 铁素体 和 渗碳体 的机械混合物。 31. 莱氏体是奥氏体和渗碳体的机械混合物, 而变态莱氏体是珠光体和渗碳体的机械混合物。 32.铁碳合金的室温显微组织由 铁素体 和 渗碳体 两种基本相组成。钢中的基体相是 铁 素体 ,强化相是 渗碳体 。 33.由于实际金属内部存在 位错 缺陷,金属才能产生滑移变形,滑移的实质是 借助金属 位错运动 ,所以使金属实际强度值大大 低于 理论强度值。 34 滑移系是指 一个滑移面和该面上的一个滑移方向 ,面心立方晶格的滑移面为{111}4 个 ,滑移系方向为〈110〉3 个 ,构成 12 个滑移系。 35. 加工硬化现象是指 随变形度增大,金属的强硬度显著增高而塑韧性明显下降的现象, 加工硬化的结果使金属对塑性变形的抗力 增加 , 造成加工硬化的根本原因是位错密度提高 36.影响多晶体塑性变形的两个主要因素是 晶界 、 相邻相粒间的位相差 。 37. 金属塑性变形的基本方式是 滑移 (最主要方式) 和 孪生, 冷变形后金属的强度 升高 , 塑韧性 下降 ,该现象称为加工硬化。 38.塑性变形后残留在工件内部的内应力包括 宏观内应力、微观内应力、晶格畸变 三种。 39 金属经冷塑性变形后,其组织和性能会发生变化,如 、 、 、 等 等。 (答案---组织变化:晶粒变形;亚结构细化;产生形变织构。 性能变化:产生加工硬 化;产生残余应力;性能出现方向性;电阻↑,导电、导磁↓,化学活性↑,耐蚀性↓。 ) 40. 金属发生再结晶的驱动力是 晶格畸变能 ,重结晶的驱动力是 两相间体积自由能差 , 再结晶与重结晶的主要区别是 再结晶形核中无晶格类型的变化 。 41 金属板材深冲压时形成制耳是由于 形变织构 造成的。 42.根据经验公式得知,金属的最低再结晶温度与熔点的大致关系是 T 再≈0.4T 熔。纯铁 的最低再结晶温度为大约为 450℃,钢的最低再结晶温度往往(高于,低于) 高于 这个温 度。 (碳钢:T 再=500~650℃) 43 在钢的各种组织中, 马氏体的比容最大, 且随着 w(C)的增加而增大; 奥氏体的比容最小。 44.板条状马氏体具有高的 强硬度 性能及一定的 塑性 与 韧性 性能。 片状马氏体具有 低的 塑韧性能,和 高的 强硬度性能。 45. 淬火钢低温回火后的组织是 回火马氏体 ;中温回火后的组织是 回火屈氏体 ,一般用 于高 弹性极限 的结构件; 高温回火后的组织是 回火索氏体 , 用于要求足够高的 强度 及 高的 塑韧性 的零件。 46.钢在加热时,只有珠光体中出现了 能量 起伏、 结构 起伏和 成分 起伏时,才有了转 变成奥氏体的条件,奥氏体晶核才能形成。 47.马氏体的三个强化包括 固溶 强化、 相变亚结构 强化、 时效 强化。 48. 共析钢加热至稍高于 727℃时将发生 P→A 的转变, 其形成过程包括 奥氏体在 F—Fe3C 界面上形核(10 秒) 、 奥氏体向 F 及 Fe3C 两侧长大(几百秒)、 剩余 Fe3C 的溶解(千秒)、 奥氏体中 C 的扩散均匀化(万秒) 等几个步骤。 49 根据共析钢转变产物的不同可将 C 曲线分为 P 转变区、 B 转变区、 M 转变区三个转变区。 50 根据共析钢相变过程中原子的扩散情况,珠光体转变属于 扩散型 转变,贝氏体转变属 于 半扩散型 转变,马氏体转变属于 非扩散型 转变。 51. 马氏体按其组织形态主要分为 板条状马氏体 和 片状马氏体 两种; 马氏体按其亚结构 主要分为 位错马氏体 和 孪晶马氏体 两种。马氏体的强度主要取决于 其中的碳含量 。 52.贝氏体按其形成温度和组织形态,主要分为 上贝氏体 和 下贝氏体 两种。 53.珠光体按其组织形态可分为 球(粒)状 珠光体和 片状 珠光体;按片间距的大小又可 分为 粗 P 体、 索氏 体和 屈氏 体。片状珠光体的强硬度主要取决于 片层间距 。 54 描述过冷奥氏体在 A1 点以下相转变产物规律的曲线有 C C T 和 T T T 两种;对比这两 种曲线可看出,前者指示的转变温度比后者 低 ,转变所需的时间前者比后者 长 ,临界冷 却速度前者比后者 小 。 55 当钢发生奥氏体向马氏体组织的转变时,原奥氏体中 w(c)越高,则 Ms 点越 低 ,转变 后的残余奥氏体量越 多 。 56 钢的淬透性越高,则临界冷却速度越 小 ;其 C 曲变被热处理工件的 化学成分 ,但却能改变它的 组织结构 。 58 根据铁碳相图, 碳钢进行完全退火的正常加热温度范围是 AC3 +30~50℃ , 它仅用于 亚 共析 钢。 59 钢球化退火的主要目的是 使碳化物球化 ,它主要适于 共析、过共析 钢。 60 钢的正常淬火加热温度范围, 对亚共析钢为 AC3 +30~50℃; 对共析和过共析钢则为 AC1 +30~50℃。 61 把两个 45 钢的退火态小试样分别加热到 Acl~Ac3 之间和 Ac3 以上温度快速水冷, 所得 组织前者为 M 加 F 未溶 ;后者为 M 。 62 淬火钢进行回火的目的是 消除内应力 ;通常回火温度越高,钢的强度与硬度越 低 。 63. 淬火内应力主要包括 组织应力 和 热应力 两种。 淬火时, 钢件中的内应力超过钢的 屈 服 强度时,便会引起钢件的变形;超过钢的 抗拉 强度时,钢件便会发生裂纹。 64.热应力的大小主要与冷却速度造成零件截面上的 温差 有关,冷却速度 越快 ,截面温 差 越大 ,产生的热应力愈大。 65.根据合金元素在钢中与碳的相互作用,合金元素可分为 碳化物形成元素 和 非碳化物 形成元素 两大类。 66.按钢中合金元素含量将合金钢分为 低合金 钢、 中合金 钢、 高合金 钢, 其合金元素 含量分别为 < 5% 、 5%-10% 、 >10% 。 67.合金钢按用途分类可分为 合金结构 钢、 合金工具 钢、 特殊性能 钢。辨别钢质量等 级高低的主要依据是 S、P 等杂质含量的高低 。 68.除 Co 和 >2.5%的 Al 元素以外,其它所有的合金元素都使 C 曲线往 右 移动,使钢 的淬火临界冷却速度 下降 ,提高了钢获得马氏体的能力即钢的 淬透 性。 69.形成强碳化物的合金元素有 V 、 Nb 、 Zr 、 Ti 。 70.扩大奥氏体区域的合金元素有 Mn 、 Ni 、 C 、 Cu 。(面心) 71.除 Mn、P 元素外几乎所有的合金元素都能阻止奥氏体晶粒长大,起到细化晶粒的作用。 72.几乎所有的合金元素除 Co 、 Al 以外,都使 Ms 和 Mf 点 下降 。因此,钢淬火后在 相同 w(C)下合金钢比碳钢组织的 A 残余 增多,从而使钢的硬度 少许下降 。 73.合金结构钢按用途可分四类,它们的 w(C)有一个大致范围。在 0.25%一 0.55%之间 的为 调质钢 ,在 0.45%~0.9%之间的为 弹簧钢 ,在 0.95%一 1.15% 之间的为 轴承钢 ,在 0.15%~0.3%之间的为 渗碳钢 。 74.合金钢中提高淬透性的常用合金元素为 Mn 、 Cr 、 B 、 Ni 、 W 、 Mo 。 固溶强化:Si、Mn、Ni 细化晶粒:Al、V、Ti、W、Mo、Nb、Zr 提高回火稳定性:W、Mo、V、Si、Cr 消除高温回火脆性:W、Mo 75.20CrMnTi 是 渗碳 钢,Cr、Mn 主要作用是 提高淬透性 ,Ti 主要作用是 阻止晶粒长 大,细化晶粒 。 76.调质钢 w(C)范围 0.25%一 0.55% ,加入 Cr、Mn 等元素是为了提高 淬透性 ,加 入 W、Mo 是为了 消除第二类回火应力 。 77.40Cr 钢属 调质 钢,其 w(C)为 0.4% ,w(Cr)为 1% ,可制造 齿轮 零件。 78.工具钢按用途可分 量具钢 、 模具钢 和 刃具钢 。 79.工具钢按合金元素含量分为碳素工具钢、低合金工具钢和高速钢或高合金工具钢三类。 80.与白口铸铁相比,灰口铸铁在成分、组织与性能上的主要区别分别是 Si 含量多 、 大 量碳以石墨形式存在 和 硬度、 脆性下降 ; 石墨化的三个阶段分别为 共晶转变温度区间 、 高温 A 析出石墨 和 共析转变石墨化 ;欲获得完全珠光体基体,第三阶段的石墨化 完全 不 进行。 81.根据转变温度或冷却速度不同,共析碳钢过冷奥氏体的转变产物分别为马氏体类型、贝 氏体类型和珠光体类型。 碳素钢在热轧后的产物通常为珠光体类型, 等温淬火的产物为通常 为贝氏体类型。
《材料成型金属学》教学资料:1 位错及柏氏矢量

2.柏氏矢量的表示法
柏氏矢量的大小和方向可以用它在晶轴(Crystallographic Axis)上的 分量,即用点阵矢量a、b和c来表示。
立方晶系晶体,由于a=b=c,故可用与柏氏矢量b同向的晶向指数 (Orientation Index)来表示。
例:柏氏矢量等于从体心立方的原点到体心的矢量,则b=a/2+b/2+c/2,
证明:设有一条位错线AO,柏氏回路为B1,其柏氏矢量为b1,移动到节点 O后,分为两个位错OB和OC,其柏氏矢量分别为b2和b3,b2和b3的柏氏回 路为B2和B3合成的B2+3,B1应与B2+3等价,所以b1=b2+b3。表明一条位错 线分成两根时,其柏氏矢量只有一个。
证明位错线方向指向同一结点(从同一结点出发)的 三条位错柏氏矢量为0
Negative Edge
混合型位错滑移
在切应力作用下,各位错线分别向外扩展,一直到达晶体边缘。 晶体滑移由柏格斯矢量b决定,产生一个b的滑移。
(a) body-centered cubic 体心立方 (b) face-centered cubic 面心立方 (c) hexagonal close-packed 密排立方
3. 柏氏矢量的守恒性(Conservation)
对于一定的位错其柏氏矢量是固定不变的,叫守恒性。 (1)一条位错线只有一个柏氏矢量。
逐步滑移是通过晶体内位错一步一步移动来实现的位错移动一个原子间距需要克服的位垒比理想晶体作整体滑移时原子克服的位垒位错的引入edgedislocationscrewdislocation混合位错的运动mixeddislocationsimplecubiccrystalcmcmalnl将位错线看作于垂直某一平面的直位错线为了便于描述晶体中的位错更确切地表征不同类型位错的特征1939年伯格斯提出了采用柏氏回路burgerscircuit来定义位错借助一个规定的矢量来揭示位错的本质
《材料成型金属学》教学资料:第一章位错理论基础

晶界特点
1) 晶界—畸变—晶界能—向低能量状态转化—晶粒长大、 晶界变直—晶界面积减小; 2) 阻碍位错运动— 流变应力↑ 细晶强化; 3) 位错、空位等缺陷多—晶界扩散速度高; 4) 晶界能量高、结构复杂—容易满足固态相变的条件— 固态相变首先发生地; 5) 化学稳定性差—晶界容易受腐蚀; 6) 微量元素、杂质富集。
1 位错理论基础
Fundamentals of dislocation theory
理想晶体 完全按照空间点阵有规则排列
实际晶体 不可能完全规则排列,存在晶格缺陷 lattice defect
1.1 晶体缺陷概述
晶体中的缺陷: 原子排列偏离完整性的区域
点缺陷-在三个方向上尺寸都很小 线缺陷-在二个方向上尺寸很小 面缺陷-在一个方向上尺寸很小
Ae-q / kT
空位迁移速度与绝对温度T和空位迁移能量q的关系 式中:A为常数,k为玻尔兹曼常数。
点缺陷对晶体性质的影响
晶格畸变:点缺陷引起晶格局部弹性变形。
空位缺陷
间隙粒子缺陷 杂质粒子缺陷
点缺陷引起的三种晶格畸变
点缺陷对材料性能的影响
点缺陷的存在会使其附近的原子稍微偏离原结点位置才能平 衡,即造成小区域的晶格畸变。
Low Angle Grain Boundary -小角晶界
(a)倾侧晶界模型;(b)扭转晶界模型
小角晶界可理解为位错墙 位向差θ<10°
亚结构
变形→位错密Leabharlann 增加→位错缠结 高位错密度区将位错密度低的区域隔开 → 晶粒内部出现“小晶粒” ,取向差不大→ 胞状亚结构
.
透射电镜 (TEM)
大角晶界
理想晶体原子 面堆积
含有刃型位错晶 体原子面堆积
《材料成型金属学》教学资料:1.4 位错应力场
3. Maximum shear stresses on the glide plane
1. Compression above
the glide plane
2. Tension below it
位错的能量
位错的存在引起晶格畸变,导致晶体能量增 高。此增量称为位错的应变能,或简称位错能。
在位错线的周围存在内应力,例如刃型位错,在多余半原子面 区域为压应力,而缺少半原子面的区域存在着拉应力;在螺位错 周围存在的是切应力。所以位错周围存在弹性应变能。
定义:每增加单位长度的位错线所做的功或增加的位错能 -位错的线张力。
有限,可以忽略不计。因此,位错的存在使晶体处于
高能的不稳定状态,可见位错是热力学上不稳定的晶
体缺陷。
线张力
位错应变能与位错线长度成正比。为降 低能量,位错线具有尽量缩短其长度的倾向, 从而使位错产生线张力。 其作用是使位错变直—降低位错能量 • 相当于 物质弹性—称之为位错的弹性性质 • 类似于液体 为降低表面能产生的表面张力。
Displacements and stresses
螺型位错应力场
按弹性理论,可求得螺型位错周围只有一个切应变:
所以相应的各应力分量分别为:
其中:G为切变模量,b为柏氏矢量,r为距位错中心 的距离或者用直角坐标表示:
刃型位错应力场
刃型位错的应力场比螺型位错复杂的多。根据模型所 示,经计算可得刃型位错周围各应力分量以圆柱坐标表示 为:
由于位错的存在,在其周围存在一应力场。
位错应变能
位错中心处原子严重错排,周围原子偏离 中心位置-位错周围产生应力场,晶体的 内能也增加。
因晶体中存在位错而使晶体增加内能-位 错的应变能。
材料成型原理
材料成型原理(金属塑性成形原理)第一章 绪论塑性成形是利用材料的塑性而获得所需形状与尺寸的工件的一种加工方法。
塑性成形又称为塑性加工与压力加工。
金属塑性加工的主要优点:○1结构致密,组织改善,性能提高。
○2材料利用率高,流线分布合理。
○3精度高,可以实现少无切削的要求。
○4生产效率高。
塑性成形原理课程的内容⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎨⎧⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎨⎧⎪⎪⎩⎪⎪⎨⎧滑移线法主应力法上限法近似方法法求解塑性问题的经典方应变关系应力屈服准则应力分析应变分析塑性力学金属学塑性成形原理、课程特点:以张量理论为基础。
张量理论基础第一节 笛卡儿张量的定义及其代数运算物理量本身是不依赖于坐标系而存在的,而同一物理在不同坐标系中会有不同的数量特征。
张量是一种数学工具,用它来描述物理量及其运动,所得到的数量表征和分析结果,在任何坐标系中都具有不变形式。
我们讨论的是笛卡儿直角坐标系中的张量。
一、 笛卡儿坐标系的基矢笛卡儿坐标系⎩⎨⎧-右手规则321x x x O设e k (k=1、2、3)沿Ox k 轴的单位矢量,称为基矢量或基矢。
定义基矢的点积或标量积:⎩⎨⎧≠==∙lk lk e e kl k .0.11δ kl δ为Kronecker 克氏符号。
定义基矢的叉积或矢量积为:k ijk j i e e e =∈⨯ ijk ∈为置换符号。
⎪⎩⎪⎨⎧-=∈,其它的奇数排列、、为、、,的偶数排列、、为、、,032113211k j i k j i ijk指标ijk 的原始排列顺序为1、2、3,如果将排列中的任意一对相邻指标互换,则称为指标的一次置换。
例如1 2 3给一次置换就成为1 3 2或2 1 3。
如果再互换一对指标,就称为二次置换。
依次类推可以定义指标排列的几次置换。
当几次为奇数时,称为奇置换。
而几为偶数时,称为偶置换。
二、 求和约定任一矢量 i i e e e e μμμμμ=++=332211 ij ij i j ij ij υμυμ=∑∑==3131在三维的欧矢空间内,如果某一指标在同一项中重复出现,就表示要对这个指标从1到3求和。
《材料成型金属学》教学资料:1-11实际晶体中的位错
12 63
54
12 63
54
12 63
54
12 63
54
立方堆积示意图
A C B A C B A
全位错和不全位错
以面心立方晶体为例: ABCABCABC堆垛
_
111晶面
A C
1 110
2
C但层在 相已对滑于移A区层和沿未1滑10 移晶区向之滑间移形12成11全0,位晶错体结构不变,。
b
1 2
110
4. 扩展位错的观察
TiAl金属间化合物
堆垛层错 stacking fault
层错能与晶粒细化
位错理论的应用
位错间相互作用 位错与点缺陷作用 位错与面缺陷作用
正误判断
在位错线张力作用下会消失的位错台阶称为割阶; 随着塑性变形的变形量不断增大,晶体中的位错密度可能
减少、不变或增加; 在位错塞积群中,位错的个数与外加切应力成正比; 扩展位错的宽度与晶体层错能成正比。
面心立方晶体的滑移
如:1 a110 1 a121 1 a211
2
6
6
1 a1 10
2
1 a1 2 1
6
1 a211
6
扩展位错的交滑移
位错的束集
当螺型位错分解为扩展位错后,其中的层错区只能在原滑 移面上随两个不全位错移动,不能转移到新的滑移面上。
如果这样的扩展位错在滑动过程中受阻,只有重新合并为 螺型全位错才能进行交滑移。
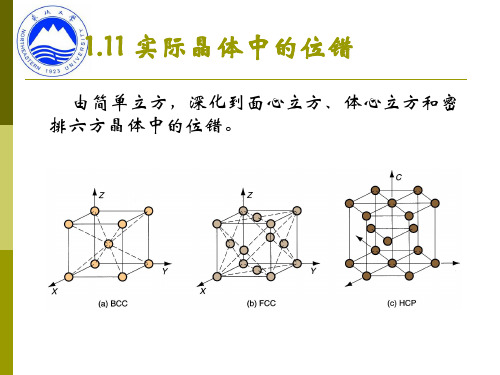
1.11 实际晶体中的位错
由简单立方,深化到面心立方、体心立方和密 排六方晶体中的位错。
基本概念
1.位错的类型
简单立方:b≡点阵矢量—只有全位错 实际晶体:b > = <点阵矢量 b=点阵矢量整数倍— 全位错
材料成型金属学-塑性变形机制

一般是原子密度最大的晶面。因为这些晶面面间距最 大、面与面之间的结合力最弱,切变阻力最小。
滑移方向(Slip Direction):
滑移面上原子排列最密的晶向。因为密排方向上原子间距 最小、位错的柏氏矢量最小,滑移阻力最小。
滑移系(Slip System):
不同晶体结构中,其滑移面数与滑移方向数的乘积。
固溶原子(原子),%
原子尺寸比Cu大的Sn等 对流变应力的影响非常 显著。
固溶原子对铜单晶临界分切应力的影响
间隙固溶 固溶体中的晶格畸变置示换意固图溶
a)间隙固溶体 b)置换固溶体
3)变形温度
温度↑, τc ↓,因为原子动能增大,原子间结合力减弱; 但高温(熔点)时,温度↑, τc不变;
三种常用金属的临界分 切应力随温度的变化
2.1.5 滑移的基本类型
• 单滑移(Single Slip): 外加切应力>τc,开动一组滑移系;发生在滑移系较少或塑性变形
开始阶段。 过程:当n个位错移出晶体,滑移量∆=nb; 特征:表面平行的滑移线所形成的滑移带;
• 多滑移(Multiple Slip): 多个滑移系同时开动;加工硬化。 特征:两组或多组交叉的滑移线;
临界切应力(Critical Shear Stress)
➢只有当外力在某一滑移系中的分切应力达到一定 临界值时,该滑移系方可首先发生滑移,该分切应 力称为滑移的临界分切应力;
➢ 沿滑移面滑移方向上的分切应力; ➢ 能够引起滑移系开动的分切应力.
滑移方向
SS
φ---滑移面法线与横截面法线间夹角 λ- -轴向拉力与滑移方向间夹角 τc = σs cosφ cosλ 或σs = τc /(cosφ cosλ )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012期中考试
1.(12分)在滑移面上有一位错环,所受切应力如图所示。
(1)说明A 、B 、C 和D 处位错的性质; (2)说明位错环运动的方向;
(3)画出位错环运动后晶体产生的滑移。
答:(1)A .B :刄型位错;C 、D :螺型位错;‘
(2)位错环向外运动。
(3)
2.(18分)回答下列问题:
(1)(4分)在用连续介质模型考虑位错的应力场时,
刃型位错应力场中的那些分量为零?
(2)(8分)从以下几方面比较滑移和攀移:
①位错类型;②温度条件;③保守运动;④塑性变形。
位错类型 温度条件 保守运动 塑性变形 滑移 刄型位错 螺型位错 室温 高温 是 主要机制 攀移 刄型位错
高温
非
协调机制
(3)(6分)解释某些材料在拉伸时为何出现图示现象。
答:位错与溶质原子的交互作用会引起溶质原子向位错聚集, 形成了溶质原子气团。
溶质原子气团有钉扎位错的作用,在 变形时位错要克服这种钉扎作用,因此会出现屈服点延伸。
滑移面 )⎪⎪⎪
⎪⎪⎪⎭
⎪⎪⎪⎪⎪⎪⎬
⎫
====+-==+=+-=++-=0)()(),(,)()(,)3(222
222
22222
2222zy yz zx xz yx xy yy xx zz yy xx y x y x x D y x y x y D y x y x y D ττττττσσνσσσ
3.(10分)正误判断。
如不正确,请改正。
(1)位错的应变能与位错线长度无关。
F
(2)刃型位错和螺型位错都能发生交滑移;F
(3)位错交割形成的扭折可在位错运动的过程中消失;T
(4)材料的层错能越高,越容易形成层错;F
(5)位错发生反应需满足能量条件。
T
4.(10分)试从晶格缺陷的角度分析材料强度提高的原因。
开放题。
强化机制:位错与界面交互作用-晶界强化;位错之间交互作用-应变硬化;溶质原子与位错交互作用-固溶强化;第二相粒子与位错交互作用-分散强化。
其他:增加空位(辐照)-空位强化。
5.(5分)图(a)为单晶体未变形点阵,说明(b)、(C)、(d)中哪个为滑移、哪个为孪生变形,并比较两种变形的异同点。
(a)(b) (c) (d)
滑移孪生
相同点在切应力下进行;
沿特定晶面、晶向进行;不改变晶体结构。
不同点
切变均匀性不均匀(仅滑移面上)均匀(整个变形区)
面两边晶体位向不变,抛光浸蚀后不
重现
改变,成镜像对称,抛
光浸蚀后仍可重现(使晶体
表面产生浮凸)
切变量滑移方向上原子间距的
整数倍,较大
小于孪生方向上的原子间
距,较小
位错机制全位错运动的结果半位错运动的结果
密排面的堆垛顺序不变改变
临界切应力小大
变形速度慢快
6.(5分)图(a)为未变形区的堆垛层错顺序,请在图(b)中标出发生孪生后的堆垛层错顺序。
(a)(b)
答:CABC
7.(5分)以孪生与扭折的联合机制为例说明二者在塑性变形过程中的作用。
答:孪生的作用使试样端部趋于产生相对位移(调整位向);扭折带的形成容许试样适应试验条件的约束(协调变形)。
8.(5分)简述钢的晶粒大小与变形抗力及塑性的关系。
答:钢的晶粒越细,其变形抗力及塑性越好。
因为晶粒越细,晶界总面积越大,位错障碍越多;需要协调的具有不同位向的晶粒越多,使金属塑性变形的抗力越高。
Hall-Petch关系式。
晶粒越细,单位体积内晶粒数目越多,参与变形的晶粒数目也越多,变形越均匀而分散,减少应力集中,使在断裂前发生较大的塑性变形。
强度和塑性同时增加。
9.(5分)模锻与平锤头间锻造相比,采用那种加工方法时金属的变形抗力较大?为什么?
答:模锻时金属的变形抗力较大。
压应力状态越强,变形抗力越大。
模锻与平锤头间锻造相比,压应力状态更
强,因此变形抗力较大。
10.(5分)如图所示,平辊轧制中间厚边部薄的轧件时,易产生那种裂纹缺陷?为什么?
答:边部周期性裂纹。
发生不均匀变形,产生附加应力。
边部变形小,受到附加拉应力,当达到断裂极限时,产生裂纹。
11.(10分)以图示说明圆柱体镦粗产生单鼓不均匀变形时形成的三个变形区,并简述各变形区的变形特点。
答:
Ⅰ区: 难变形区,端部接触面附近,受接触摩擦影响较大;硬取向,远离与垂直的作用力轴线呈大致45º交角的易滑移区,塑性变形较困难。
Ⅱ区: 易变形区,距端面距离较远;软取向:处于与垂直的作用力轴线呈大致45º交角的最有利的变形区域;
Ⅲ区: 自由变形区,靠近表面,大致处于Ⅱ区中心部分的四周,变形量介于Ⅰ区和Ⅱ区之间。
12.(10分)碳钢的塑性与温度的关系如图所示,试分析图中的两个低塑性区的成因?
答:200~400 ℃时处于蓝脆区,位错拉着Cottrell气团运动。
800~950 ℃,与相变有关,产生不均匀变形,塑性降低。
也有人认为与S有关,并称之为红脆(热脆)区。