输电线路除冰机器人关键技术综述
除冰机器人技术报告

输电线自取电热融冰机器人的研制技术报告河南省电力公司南阳供电公司2013年10月1日目录课题背景:我国是世界上输电线路冰灾事故频发国之一。
改革开放以来,我国的电力行业得到迅速发展,电网覆盖面积扩大,线路走廊穿越的地理环境更加复杂,输电线路冰灾事故更为严峻。
严重的输电线路覆冰会导致杆塔倾斜﹑倒塌﹑断线,绝缘子闪络,而且线路不均匀覆冰和不同期脱冰还会引起导线舞动现象,这些会引发线路跳闸﹑供电中断等事故,给工农业生产和人民生活造成严重影响。
2008年初,我国南方冰灾给人民生产生活造成了严重影响,电网损失严重,多个省份供电线路因覆冰而垮塌、供电中断。
据统计,2008 年南方冰灾造成107 人死亡,直接经济损失1111 亿元人民币。
在国外,如俄罗斯、加拿大、日本、美国、芬兰等国,同样存在严重的冰灾事故,线路覆冰灾害已成为世界性问题。
图1 输电线冰灾事故现场目前,国内外除冰方法有30余种,根据除冰机理可分为机械除冰法与热力融冰法两类。
机械除冰方法能耗较小,但是除冰效率低,而且一般需要人工参与;热力融冰较机械除冰速度快,安全性高,但实际应用中限制因素太多,不能广泛适用。
对于较为严重的导线覆冰一般以人工上线除冰最为有效,但人工除冰危险性很高且效率较低。
2008年,我国在抗击雪灾电力抢修中牺牲的10名电力职工全都是因为对线路进行机械除冰时出现意外。
此外,输电系统是一个具有强电场的系统,长时间工作在强电场中,人体将受到电磁辐射的侵害。
为保障电力系统可靠性,提高输电线路除冰效率,维护工人安全,减少损失,开发一种经济、安全、有效的新型除冰设备来替代或部分替代工人进行除冰作业一直是国内外相关研究的热点。
课题来源与研究意义:本课题来源于国家科技支撑计划重点项目“220kV 及以上输电线路在线除冰机器人关键技术与装备研究(2008BAF36B01 )”子课题“输电线除冰机器人设计开发”。
目前,国内还没有技术成熟的除冰机器人,在国外,加拿大已有除冰机器人产品,但该除冰机器人只能在两塔杆之间完成单线上除冰任务,不能够走分裂导线替代人工除冰。
除冰机器人应用于输电线路除冰的专利技术发展综述
除冰机器人应用于输电线路除冰的专利技术发展综述摘要:本文就机器人除冰技术用于输电线路上的应用的相关专利进行分析。
主要利用专利数据库的检索结果为分析样本,从中国、全球的专利申请量、申请人和分类号的分布等多方面进行统计分析,总结了与机器人除冰中的应用相关的国内和国外专利的申请趋势、主要申请人分布以及对重点技术的发展路线进行了梳理。
关键词:除冰机器人、专利分析、技术综述1 引言严重的输电线路覆冰会导致杆塔倾斜、倒塌、断线及绝缘子闪络,由此引起的线路跳闸、供电中断等事故将给工农业生产和人们生活造成严重影响。
研究有效的线路抗冰融冰技术,最大限度地避免和防止冰灾对输电线路造成的危害,已成为国内外电力工业一个有待解决的重要课题。
2 输电线路除冰技术的分类目前,国内外主要采用外力敲打法、大电流热融法实施除冰,然而,受技术、能耗、成本及安全性等因素的限制,现有除冰方法具有较大局限性。
随着机器人技术的发展,采用机器人除冰已成为可能。
机器人除冰也属于机械除冰方法的一种,它是利用安装在输电线路上行走机器人的除冰机构自动清除覆冰的方法。
其具有功耗小、效率高、人员无伤亡、无需停电和转移负载等诸多优点。
上世纪80 年代,以美国、日本、加拿大为主的少数发达国家率先采用该除冰方法。
随后我国也开始了除冰机器人的研究,经过近十年来的不懈努力,已取得较大突破[1]-[3]。
目前除冰机器人的研究主要涉及除冰机构设计、除冰机器人行走机构设计以及监控采集系统等方面。
3 除冰机器人技术专利布局分析笔者利用专利数据库系统,对中国专利申请状况的趋势以及专利重要申请人进行分析,得出如下结论:3.2 国内专利分析3.1.1 国内专利申请的年度发展趋势由图1可以看出,在2007年以前,专利申请量较小,并无明显增长趋势,除冰机器人在我国还处于刚刚起步阶段,在2007年至2014年期间,专利申请量大幅增长,进入快速发展期。
这与我国整体经济形势以及国家“十五”国家高新技术发展计划(863计划)对输变电行业的支持密切相关。
输电线路防冰除冰技术
输电线路防冰除冰技术综述一、除冰技术目前国内外除冰方法有30余种,大致可分为热力除冰法、机械除冰法、被动除冰法和其他除冰法四类。
热力除冰方法利用附加热源或导线自身发热,使冰雪在导线上无法积覆,或是使已经积覆的冰雪熔化。
目前应用较多的是低居里铁磁材料,这种材料在温度<O。
C时,磁滞损耗大,发热可阻止积覆冰雪或熔冰;当温度>0C时,不需要熔冰.损耗很小。
这种方法除冰的效果较明显,低居里热敏防冰套筒和低居里磁热线已投入工程实用。
采用人力和动力绕线机除冰能耗成本较高。
机械除冰方法最早采用有“ad hoe”法、滑轮铲刮法和强力振动法,其中滑轮铲刮法较为实用,它耗能小,价格低廉,但操作困难,安全性能亦需完善。
采用电磁力或电脉冲使导线产生强烈的而又在控制范围内振动来除冰,对雾淞有一定效果,对雨淞效果有限,除冰效果不佳。
被动除冰方法在导线上安装阻雪环、平衡锤等装置可使导线上的覆冰堆积到一定程度时,由风或其它自然力的作用自行脱落。
该法简单易行,但可能因不均匀或不同期脱冰产生的导线跳跃的线路事故。
除上述方法外,电子冻结、电晕放电和碰撞前颗粒冻结、加热等方法也正在国内外研究。
总之,目前除防冰技术普遍能耗大、安全性低,尚无安全、有效、简单的方法。
1、热力融冰(1)三相短路融冰是指将线路的一端三相短路,另一端供给融冰电源,用较低电压提供较大短电路电流加热导线的方法使导线上的覆冰融化。
根据短路电流大小来选取合适的短路电压是短路融冰的重要环节。
对融冰线路施加融冰电流有两种方法:即发电机零起升压和全电压冲击合闸。
零起升压对系统影响不是很大,但冲击合闸在系统电压较低、无功备用不足时有可能造成系统稳定破坏事故。
短路融冰时需将包括融冰线路在内的所有融冰回路中架空输电线停下来,对于大截面、双分裂导线因无法选取融冰电源而难以做到,对500 kV线路而言则几乎不可能。
(2)工程应用中针对输电线路最方便、有效、适用的除冰方法有增大线路传输负荷电流。
高压输电线路除冰技术
高压输电线路除冰技术摘要:近些年来我国高压输电线路受冰灾的次数高达数千次,由于高压输电线路物布置地理位置,很容易受天气气候的影响,尤其是在大风天气下,高压输电线路由于覆冰的影响会引发电线的舞动,从而造成断线,杆塔倒塌等恶劣事故的发生,所以高压输电线路除冰成为了每个电力工作人员工作的一大重点。
关键词:高压输电线路除冰技术要点0 前言高压输电线路的防除覆冰成为电力工作者工作的一个重点,应该加强对高压输电线路覆冰的研究工作。
电力工作者应该提高对高压输电线路除冰工作的重视,深刻理解高压输电线路覆冰的危害,掌握高压输电线路除冰的基本技术,做好高压输电线路的除冰工作,在实践的基础上总结高压输电线路除冰经验,对高压输电线路除冰技术进行合理的展望,完成对高压输电线路的保护,用技术的手段确保高压输电线路的问题,进而提升供电的稳定。
电力从产生到应用一般要经历高压输电线路的输送,随着经济和社会的发展,各界对电力需求越来越高,电力生产能力也相应提高,高压输电线路的长度正在逐步增加,以完成电力和各界的需求。
高压输电线路布设于田野、山脉和水系,容易受到天气因素的影响,据不完全统计,进50 年我国高压输电线路遭受冰灾的次数高达1000 次,高压输电线路覆冰会引发电线的舞动,在风力较大的情况下会导致断线和杆塔倒塌,成为影响我国北方高压输电网络安全的重要因素。
1.高压输电线路机械除冰法使用机械外力迫使高压输电线路导线上的覆冰脱落,分为的方法。
“ad hoc”法、滑轮铲刮法、电磁力除冰法和机器人除冰法。
1.1“ad hoc”法“ad hoc”法,被告称之为外力敲打法,就是由工作人员在现场利用工具敲击输电线路,以此来达到除冰的目地,这个方法简便易行,但只能用于以10KV为主的近距离线路除冰,效率低,工作量大,只能在紧急情况下使用,应用范围极小。
1.2滑轮铲刮法它是由在地面上的工作人员通过控制输电线路上的滑轮移动,利用力的作用,使导线弯曲,然后使覆冰破裂,这个方法效率高、操作简便、能耗小,并且价格低廉,是目前输电线路穝有效的除冰方法之一,但是此种方法受地形限制,安全性能还不太完善。
高压输电线路除冰技术
高压输电线路除冰技术摘要:近些年来我国高压输电线路受冰灾的次数高达数千次,由于高压输电线路物布置地理位置,很容易受天气气候的影响,尤其是在大风天气下,高压输电线路由于覆冰的影响会引发电线的舞动,从而造成断线,杆塔倒塌等恶劣事故的发生,所以高压输电线路除冰成为了每个电力工作人员工作的一大重点。
关键词:高压输电线路除冰技术要点0 前言高压输电线路的防除覆冰成为电力工作者工作的一个重点,应该加强对高压输电线路覆冰的研究工作。
电力工作者应该提高对高压输电线路除冰工作的重视,深刻理解高压输电线路覆冰的危害,掌握高压输电线路除冰的基本技术,做好高压输电线路的除冰工作,在实践的基础上总结高压输电线路除冰经验,对高压输电线路除冰技术进行合理的展望,完成对高压输电线路的保护,用技术的手段确保高压输电线路的问题,进而提升供电的稳定。
电力从产生到应用一般要经历高压输电线路的输送,随着经济和社会的发展,各界对电力需求越来越高,电力生产能力也相应提高,高压输电线路的长度正在逐步增加,以完成电力和各界的需求。
高压输电线路布设于田野、山脉和水系,容易受到天气因素的影响,据不完全统计,进50 年我国高压输电线路遭受冰灾的次数高达1000 次,高压输电线路覆冰会引发电线的舞动,在风力较大的情况下会导致断线和杆塔倒塌,成为影响我国北方高压输电网络安全的重要因素。
1.高压输电线路机械除冰法使用机械外力迫使高压输电线路导线上的覆冰脱落,分为的方法。
“ad hoc”法、滑轮铲刮法、电磁力除冰法和机器人除冰法。
1.1“ad hoc”法“ad hoc”法,被告称之为外力敲打法,就是由工作人员在现场利用工具敲击输电线路,以此来达到除冰的目地,这个方法简便易行,但只能用于以10KV为主的近距离线路除冰,效率低,工作量大,只能在紧急情况下使用,应用范围极小。
1.2滑轮铲刮法它是由在地面上的工作人员通过控制输电线路上的滑轮移动,利用力的作用,使导线弯曲,然后使覆冰破裂,这个方法效率高、操作简便、能耗小,并且价格低廉,是目前输电线路穝有效的除冰方法之一,但是此种方法受地形限制,安全性能还不太完善。
架空输电线路的防冰与除冰技术

运营维护技术架空输电线路的防冰与除冰技术吴子璇,米东风(国网天津城东供电公司,天津300171输电线路覆冰是影响输电线路正常运行的重要问题,增加了输电线路的不稳定性,为风险事故的发生埋下了隐患因素。
使用引证法、归纳法等多种方式分析架空输电线路防冰与除冰技术的相关信息,简单介绍了现阶段随后结合实际情况从多个方面分析了实际工作中行之有效的架空输电线路防冰和除冰技术,深化了防冰与除冰技术在架空输电线路中的渗透和应用,保障架空输电线路的平稳高效运行。
Analysis of Anti-Icing and De-Icing Technology for Overhead Transmission LinesWU Zixuan,MI Dongfeng(State Grid Tianjin Chengdong Electric Power Supply Company, TianjinAbstract: Transmission line icing is an important issue that affects the normal operation of transmission lines, exacerbates the instability of transmission lines, and lays hidden dangers for the occurrence of risk accidents. This article uses various methods such as citation and induction to analyze the relevant information of anti icing and de icing冰方法,利用微波加热的方式为架空输电线路营造良以上,防止覆冰形成。
应用微波防冰技术时,工作人员可以利用公式计算微波防冰技术在实际防冰工作中的工作信(1)条线路的极大值;为两项差值的最大值。
分析人工智能除冰技术在输电线路中的应用
分析人工智能除冰技术在输电线路中的应用摘要:在最近几年里,充分利用人工智能除冰技术慢慢成为研究重点,无论是针对无人机除冰技术来说,还是就机械振动除冰技术而言,均为输电线路中的除冰工作提供了强而有力的技术支持,这些技术均能够在线路带电运行状态下持续运作,为输电线路可以实现安全稳定运作提供了重要的保障。
关键词:输电线路;除冰;人工智能;无人机;机器人;机械震动除冰引言为了尽可能降低电线路覆冰灾害现象发生的次数,以下是现阶段使用频率比较频繁的几种方法:一种是人工除冰;另一种是直流融冰技术。
但是人工除冰的缺陷是除冰期间,很容易增加安全事故发生的概率,同时线路处于停电状态;而直流融冰的缺陷是除冰期间会导致线路处于停电状态。
为了进一步保障在线路带动运作的情况下,能够顺利开展除冰作业,已然成为现阶段电力系统研究的重点工作。
1人工智能除冰技术在输电线路中的具体应用随着人工智能技术的日益完善,以下三种技术得均到了电力系统的高度重视:一是无人机除冰技术;二是机器人除冰技术;三是机械震动除冰技术。
由此可见,这几种人工智能模式,都能够在输电线路运作期间开展除冰工作。
1.1无人机除冰技术从当前的发展趋势来看,无人机技术在最近几年里得到了前所未有的进步,并在巡线以及清除异物等方面得到了普遍的认可与推崇。
但针对无人机智能巡检技术来说,其往往处于发展时期,在实用化方面依然存在很多技术有待研究,特别是就安全技术开发方面而言,现阶段还没有出现具体的试验方式以及精确结论。
相关人员使用无人机开展除冰作业时,可以在充分借助于无人机的基础上搭载以下两种设备:一种是激光设备;另一种是喷火设备,这样做的目的是为了全面除去输电线路覆冰,通常涵盖以下几点:一是无人机;二是任务设备;三是地面控制模块;四是综合保障模块等,之所以这样说是因为激光拥有很多优势,如可以单项远距离传输、存在高能量密度等,同时激光能够将一定深度的冰块击穿,以此来加快冰块融化的角度。
高压输电线路覆冰及防冰、除冰技术综述
高压输电线路覆冰及防冰、除冰技术综述蒋 明1,赵汉棣2,马小强1(1.三峡大学机械与动力学院,湖北 宜昌 443000;2.国网湖北送变电工程有限公司,湖北 武汉 430000)Icing of HV Transmission Line and Summary of Anti-icing andDe-icing TechnologyJIANG Ming1, ZHAO Handi2, MA Xiaoqiang1(1. Mechanical and Power Engineering College of China Three Gorges University, Yichang 443000;2. State Grid Hubei Power Transmission and Transformation Engineering Co., Ltd., Wuhan 430000)〔摘 要〕 介绍了电网覆冰的形成机理、影响覆冰程度的各因素以及覆冰的危害。
列举了近年来国内外各种覆冰监测技术和防冰、除冰手段,并对这些方法和技术进行了分析与对比,总结出现有技术的不足,同时指出了覆冰监测和除冰领域今后的研究方向和发展趋势。
〔关键词〕 电网覆冰;覆冰监测;除冰;防冰Abstract: This paper introduces the formation mechanism of icing on HV transmission lines, the factors affecting the degree of icing and the harm of icing. It enumerates various icing monitoring technologies and anti-icing and de-icing methods at home and abroad in recent years, makes analysis and comparison of these methods and technologies, summarizes the shortcomings of existing technologies, and points out the future research direction and development trend in the field of icing monitoring and de-icing.Key words: icing on transmission line; icing monitoring; de-icing; anti-icing中图分类号:TM726.1 文献标识码:A 文章编号:1008-6226 (2020) 04-0026-060 引言自然环境中电力系统的安全运转与气候环境息息相关,随着天气变化,输电线路不断经受着日晒雨淋的侵害,其安全性能也会受到影响。
输电线路除冰机器人关键技术综述
图7输电线路结构示意图
在设计控制系统时可采用如图8所示的分层控 制系统结构,即将总系统分为地面监控层(管理层)
和机器人本体控制层(规划层和执行层),分别实现
除冰机器人运动机构和除冰执行机构的伺服控制。
2011年12月
王耀南等:输电线路除冰机器人关键技术综述
33
杆塔等障碍,行走环境介于结构化和非结构化环境
性的影响,需要结合变结构控制、鲁棒控制、自适 应控制、神经网络、模糊控制或视觉伺服控制等先 进控制方法ll引,研究不确定条件下除冰机器人的精
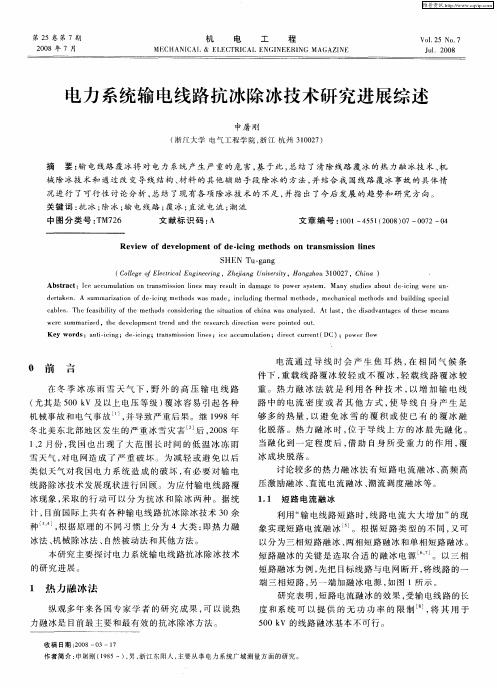
确运动伺服控制问题。 除冰机器人运行过程中需要跨越的主要障碍 物包括:绝缘子、防振锤和引流跳线(图7)。这通常
输电线除冰机器人跟一般工业机器人不同,它 悬挂在柔性输电导线上,在运行过程中机器人的姿 态时刻发生着变化,呈现出多体系三维空间的复杂
需要解决如下技术问题。 2.2.1机器人运动学和动力学建模与分析
机器人运动学和动力学特性的准确建模是实
现机器人运动控制和导航避障的前提。除冰机器人
动力学建模需要重点考虑以下问题。 (1)必须考虑机器人与柔性作业环境间的非线
性动力学耦合特性。在进行除冰机器人动力学研究 时,必须考虑柔性作业环境对除冰机器人动力学特 性的影响,即大垂度柔性输电导线与相对刚性较大 的机器人之间的刚柔耦合特性。机器人本身是一个 多刚体动力学系统,而高压输电线路相邻两塔间的 万方数据
大的局限性;随着机器人技术的发展,各种巡线机
器人已成功用于替代人工完成对输电线的巡检任
网覆冰现象严重,如何加强和改善输电线路的抗覆 冰能力,加快研究有效的线路抗冰融冰技术,最大
务,因此,采用机器人进行输电线路除冰已成为可
能。与传统除冰方法相比,采用机器人除冰具有无 人员伤亡、无须停电和转移负载等优点,无需除冰
除冰机器人工作报告

输电线自取电热融冰机器人的研制工作报告河南省电力公司南阳供电公司2013年10月1日目录主要工作内容:高压输电线路覆冰灾害给世界上很多国家造成了经济损失和人民生活不便,已在世界范围内引起广泛关注。
为保障高压输电线路安全运行,必须去除线路覆冰。
除冰机器人技术为高压输电线路除冰提供了一种经济、安全、高效的除冰方法,具有很好的应用前景和实用意义。
本次工作先是对国内外高压线机器人研究现状进行了分析,设计了一种自锁式输电线分裂导线移动机器人本体结构以及与其匹配的取电装置和加热融冰系统。
首先,进行理论分析了高压输电线路覆冰状况和除冰机构设计要求,确定了热融冰为主、涡轮风扇为辅的组合除冰方案,之后,估算了融冰所需功率,设计了除冰试验,对除冰方案可行性和除冰效果进行了验证。
然后,根据除冰机器人本体结构设计要求,确定了除冰机器人机械系统方案,并对除冰机器人越障动作进行了规划。
随后,对除冰机器人各驱动进行了选型计算,设计了除冰机器人行走底盘独立悬挂系统结构、取电装置。
最后,针对除冰机器人取电和加热装置进行了结构设计,分析了开合机构运动要求,基于四杆机构封闭性,进行了竖直摆臂机构尺度综合,确定了竖直摆臂机构尺寸,并对确定尺寸的竖直摆臂机构进行了运动分析,计算了摆臂装置所需驱动扭矩与功率。
除冰机器人结构设计完成后,制作了试验样机,进行了模拟行走试验。
研究背景和意义:输电线路覆冰和积雪常会引起线路的跳闸、断线、倒杆、绝缘子闪络和通信中断等事故。
俄罗斯、加拿大、美国、日本、英国、芬兰、冰岛和我国在内的诸多国家都曾因输电线路覆冰引发安全事故,造成了巨大的经济损失。
因此,冰雪灾害成为全世界许多国家电网系统面临的共同问题。
近年来,人类对自然资源和环境的不合理开发和利用导致的全球气候系统的变化,也正在改变冰灾等极端气象灾害发生的地域、频率及强度分布,致使对雨雪预测预报难度不断增加。
同时,植被覆盖面积的减少,裸地的增加,导致草地退化,为冰雪灾情放大提供了潜在条件。
一种输电线路的智能多功能除冰机器人的设计与实现

44摘4要为保证输电线路在冰雪灾害发生时的安全稳定运行!提高输电线路除冰工作的效率并保证操作人员的安全性! 提出了一种针对输电线路的多功能智能除冰机器人" 该装置主要利用嵌入式系统*物联网设计*(!建模及打印技术实现了输 电线上远程可视化控制的智能高效除冰" 其次借助太阳能光伏组件实现了在长距离线路上续航工作的需要" 该机器人应用 环境丰富*操作简单!有助于用户高效!安全地完成输电线路除冰工作"
!>
Copyright©博看网 . All Rights Reserved.
#科技风 $%$Βιβλιοθήκη 年 ' 月科技创新 !"#$%&$'(') *+&,-./&$01$21(3$&)%)$)3%%'
一种输电线路的
智能多功能除冰机器人的设计与实现
穆 聪$ 4火久元) 4刘钊文$ 4张 晶$ 4赵志禄$
!&兰州交通大学计算机科学与技术国家级实验教学示范中心"甘肃兰州"*#$$*$ &&兰州交通大学电子与信息工程学院"甘肃兰州"*#$$*$
!智能除冰机器人设计思路 本文舍弃国内传统除冰控制的各类方案采用由光伏组 件组建的太 阳 能 供 电 的 智 能 长 距 离 无 线 控 制 除 冰 机 器 人 除冰机器人使用嵌入式控制结合机械自动除冰具有在极端 冰冻灾害的环境下工作的能力 智能除冰机器人机体结构 主要由除冰结构控制系统运动系统通信系统及动力提供 系统五个部分构成 除冰结构是利用四旋翼无刷电机进行 覆冰清除控制系统部分是利用主控制器和扩展板与编程实 现运动系统通过可调节滑轨步进电机凹槽滑轮三大结构 组成 通信系统借助无线模块和定位模块实现了机器人的 远程通信定位等 功 能 配 合 搭 载 有 摄 像 头 的 无 线 传 输 系 统 实现了机器人在工作状态下对输电线路及周围环境的监控 除此之外在动力提供系统利用太阳能光伏组件供电提高续
输电线路除冰技术的专利技术分析

输电线路除冰技术的专利技术分析摘要:输电线路随着覆冰的增加,会导致杆塔倾斜、断线、倒塌及绝缘子闪络等故障,由此引发的电力中断、线路跳闸等事故将给工业生产和人民生活带来严重影响。
为了减轻冰雪灾害对输电线路造成的不利影响,世界上许多国家根据不同地区的地理条件和气象条件的差异绘制了冰区图,并据此制订了线路设计规范来提高电力线路的机械负荷水平,同时还投入大量力量研究电力线路的除冰技术。
关键词:除冰;振动;机器人一、现状分析1)热力除冰法的原理是利用附加热源或导线自身发热,使冰雪在导线上无法积覆,或使已经积覆的冰雪融化。
1982年Pohlman和Landers采用的高电流密度熔冰,即覆冰线路两端都从电网中断开后,一端将两条导线连接形成回路,另一端加直流电源,利用直流电流融冰,1993年以来加拿大曼尼托水电局采用的短路电流熔冰,即通过计算短路点和短路电流,人为地将两相或者三项导线短路,短路电流控制在导线最大允许电流范围之内,达到线路融冰的目的,Hydro-quebec在1998 年美加冰灾后开发了一套面向120~315 kV 电网的融冰策略,软件仿真模拟线路覆冰时电力潮流调度,能在不同网络结构下测试融冰方案,通过最优控制实现线路覆冰最小化。
在与输电线路有关的其它2种热力法中,一是1987~1990年日本Yasui、Yamamoto和Fujii等研制的电阻性铁磁线,另一是武汉高压研究所于1988~1990年研制的低居里磁热线这种除冰技术适合大范围除冰、效果明显,但能量损耗大、投资成本高。
2)机械破冰法是利用各种机械动力使冰内部产生应力破坏,从导线表面脱离。
目前常用的机械除冰法主要有4 种:即人工除冰法、滑轮铲刮法、强力振动法和机器人除冰。
ad hoc法由线路操作者在现场处理,且处理覆冰方法多样,当线路停电运行时,可采用竹竿敲打覆冰手动除冰等多种方法,这种方法简单易行,但效率低、安全性差。
加拿大MANITOBA水利局1993年研制的滑轮铲刮技术是一种由地面操作人员拉动可在线路上行走的滑轮铲除导线上覆冰的方法,它是目前较为有效且可行的架空线路机械除冰法,这种方法成本相对低廉,耗能小,但操作需停电,偏远地区线路实施困难,安全性亦需完善。
输电线除冰机器人越障

输电线除冰机器人越障摘要:输电线路是现代社会不可或缺的组成部分,但在冬季可能会受到积雪或结冰的影响,导致输电线路受损或工作中断。
本文设计了一种输电线除冰机器人,能够自主越过障碍物,对输电线路进行及时的清理和除冰工作。
机器人通过激光雷达进行障碍物检测,采用机械臂完成线路清理和冰层清除。
测试表明,该机器人具有较高的工作效率和精度。
关键词:输电线,除冰机器人,障碍物越过,激光雷达,机械臂。
正文:一、引言输电线路是现代社会不可或缺的重要设施,但面临着周期性积雪和结冰等问题,这不仅会影响输电线路的正常工作,还会带来很大的安全隐患和经济损失。
针对这一问题,本文设计了一种输电线除冰机器人,能够自主越过障碍物,对输电线路进行及时的清理和除冰工作。
二、机器人设计1. 硬件设计本文设计的输电线除冰机器人采用全轮驱动模式,具有优秀的越障性能。
机器人的上部安装着带有激光雷达的横梁,用于进行障碍物检测。
在机器人下部,固定着沿线工具抓取器和冰层清除器,用于完成除冰和清理工作。
此外,机器人还配置有高清摄像头,用于实时监视除冰过程。
2. 软件设计机器人控制软件主要由机器人底盘控制和机械臂控制两部分组成。
机器人底盘控制通过激光雷达进行障碍物检测,当机器人检测到障碍物时,能够自动调整运动轨迹,以完成越障工作。
机械臂控制则负责进行除冰和清理工作,机器人通过高清摄像头对工作效果进行实时监视,并将监视结果反馈给控制端进行处理。
三、实验结果本文采用模拟障碍物进行了机器人越障实验,测试结果表明,机器人具有良好的越障性能和工作效率。
同时,机器人的精度也非常高,能够准确地检测冰层厚度并进行清理工作。
四、结论本文设计的输电线除冰机器人在障碍物越过和除冰工作等方面具有较高的性能和精度,可为输电线路的安全运行提供有力的技术保障。
在今后的实际应用中,还需要加强对机器人的优化和改进,从而更好地为输电线路保障安全。
五、存在问题及展望尽管本文设计的输电线除冰机器人具有较好的性能和精度,但在实际应用中仍存在一些问题需要进一步解决。
输电线路除冰机器人机械部分设计

输电线路除冰机器人机械部分设计随着冬季的到来,气温的逐渐降低,大型输电线路的安全运转也面临较大的挑战。
冰雪天气容易造成输电线路结冰,导致电力设施出现故障,给正常的生产生活带来诸多不便。
为了解决这一问题,研究人员提出了输电线路除冰机器人。
本文重点介绍输电线路除冰机器人的机械部分设计。
一、输电线路除冰机器人的作用传统的输电线路除冰工作主要是通过人工爬上塔杆,使用除冰器具进行除冰。
这种方式存在较高的危险性,不仅造成人手资源浪费,而且也无法保证工作效率和安全性。
输电线路除冰机器人的出现,则解决了这一问题。
除冰机器人采用自动化控制方式,能够直接上升塔杆,通过旋转刷子等方法完成除冰工作。
这不仅提高了工作效率,而且也能够保证工作人员的安全。
因此,输电线路除冰机器人成为了解决输电线路结冰问题的重要装置。
二、输电线路除冰机器人的机械部分设计输电线路除冰机器人机械部分设计的关键在于实现机器人的上升和旋转等动作。
机器人主要包括基座、动臂、机械手爪、除冰刷等部分。
接下来,将分别介绍这些部分的设计。
1. 基座基座是输电线路除冰机器人的重要组成部分,其不仅负责支撑整个机器人,同时也需要实现整个机器人的上升和下降动作。
基座设计应尽量轻巧,同时也能承受机器人自身重量。
通常采用金属制造,基座上设有马达和外壳,以便连接动臂和下一部分装置。
2. 动臂动臂是输电线路除冰机器人的另一重要组成部分,其主要任务是将机器人送到需要进行除冰的导线附近,动臂长度一般为2.5~3.5米之间。
机器人的上升和下降动作是动臂实现的,同时,动臂上也需要设定一些辅助装置,例如,温度和车速传感器,视觉设备等。
在动臂的设计中,应该考虑到动作执行精度和旋转等特殊要求。
3. 机械手爪机械手爪是输电线路除冰机器人的关键装置,其主要任务是用于搭载除冰刷和完成除冰工作。
手爪是由机器人动臂末端延伸的部分,应该能够灵活伸缩。
机械手爪设计需要注意的一个重要问题在于重量,应尽量减轻重量以提高机器人的运动性能。
输电线路除冰机器人抓线智能控制方法
运动学模型:建立机器人的运动学模型,描述机 器人末端执行器(抓线机构)与关节角度之间的 关系,为路径规划提供基础。
在实现过程中,需要进行大量实验验证和调试, 确保控制方法的稳定性和可靠性。最终,通过在 实际输电线路除冰场景中的应用,验证该方法的 有效性和实用性。
04
实验与结果分析
实验设置
01
实验环境
感知系统
包括摄像头、红外传感器等,用于实时监测 输电线路的位置、状态和冰层厚度。
电源系统
为机器人提供持续稳定的能源供应,保证长 时间作业。
机器人工作原理
感知阶段
机器人利用感知系统对输电线路进行 扫描,获取线路的位置、形态和冰层 信息。
分析阶段
控制系统对感知数据进行处理,识别 出需要抓取和除冰的目标区域。
2. 传感器技术集成:成功集成了 多种传感器技术,实现了对输电 线路状态实时监测和自适应控制 。
这些创新点和贡献推动了机器人 技术在输电线路维护领域的发展 ,提高了电力系统的运行可靠性 和安全性。
未来研究展望
尽管本研究取得了显著成果, 但仍存在一些有待进一步探讨 的问题
1. 复杂环境下的适应性:未来 研究可进一步关注机器人在更 复杂环境(如极端天气、复杂 地形)下的适应性和稳定性。
2. 性能提升:相比传统的人工除冰方法 ,机器人除冰方法在效率、安全性和经 济性方面均有显著提升。
创新点与贡献
1. 控制算法创新:首次将深度学 习算法应用于机器人抓线控制, 提高了控制的精确度和稳定性。
3. 经济性提升:通过机器人自主 作业,降低了人力成本,提高了 除冰作业的经济性。
本研究在输电线路除冰机器人抓 线智能控制方法方面的创新点与 贡献如下
输电线路除冰机器人抓线智 能控制方法
架空输电线路除冰机器人的结构设计

第3期··架空输电线路除冰机器人的结构设计杨 暘,高虹亮,孟遂民,罗成,马小强(三峡大学机械与材料学院,湖南省宜昌市,443002)[摘要]利用机械除冰方法代替人工除冰具有较好的实用意义。
应用模块化结构设计及仿生学原理设计了除冰机器人。
机器人采用轮式行走装置、双手臂结构,除冰装置采用双旋转刀具组合碾压轮气动伸缩式除冰方式。
采用的平衡装置提高了越障时姿态稳定性,加上设计的夹紧保险装置,确保了机器人运动时整个机构的运动平衡。
该机器人能够实现对导线一般覆冰情况下的除冰和越障需求,并且可以通过更换机器人的结构模块,可以将除冰机器人转变为巡线机器人达到一机两用的目的,同时通过更改结构模块实现多分裂导线的除冰功能。
[关键词]架空输电线路;覆冰;除冰机器人;越障;除冰;平衡中图分类号:TM72文献标志码:A文章编号:1000-7229(2009)03-0093-04收稿日期:2008-08-01作者简介:杨暘(1987—),男,硕士研究生,主要从事输电线路力学方向的研究。
0引言严重的输电线路覆冰会导致杆塔倾斜、倒塌、断线及绝缘子闪络,以及因不均匀覆冰和不同期脱冰所引起的导线舞动等现象,并由此引起线路跳闸、供电中断等事故[1,2]。
由于发生冰害时往往天气恶劣,交通受阻,通讯中断,抢修十分困难,因而造成系统长时间的停电,给工农业生产和人们生活造成严重影响。
因此,寻找一种方便有效的除冰方法显得十分重要。
目前国内外采用的导线除冰方法主要有热力除冰和机械除冰2类[3],而对于较为严重的导线覆冰一般以人工上线除冰最为有效,而人工除冰效率较低且具有一定的危险性。
因此,研制安全有效的除冰机械以代替人工进行导线除冰具有较好的应用前景和实用意义。
1除冰机器人整体方案目前国内没有技术成熟的除冰机器人,而国外技术相对比较成熟的代表产品是加拿大魁北克水电研究院的Serge Montambault 等人2000年开始研制的HQ LineROVer 遥控小车,它主要用于清除电力传输线地线上的覆冰,但是该机器人质量过大,结构复杂,并且只能清除两杆塔之间的覆冰,不具备越障的功能,因此不能完全代替人工上线除冰[4,5]。
浅析高压输电线路除冰防冻机器人设计
浅析高压输电线路除冰防冻机器人设计摘要 :高压输电线路除冰防冻机器人它是通过分析高压输电线路巡检工作的特点与高压输电线路巡检机器人的发展现状及趋势相结合的一种新型高压线路除冰技术,本文主要介绍除冰防冻机器人的功能结构以及设计方法,实现机器人完成高压输电线路覆冰去除,解决电力发展中的障碍性问题,为我国的电力发展提供更好的保障。
关键词:高压输电线路;除冰机器人引言随着我国的科学技术飞速进步,各项各业的先进科技为我国的经济发展提供了很大帮助。
经济的快速发展,电力工程的大力发展,超高容量的输电线路建设越来越多,而电线线路的路径也越来越复杂,大多为地形复杂,环境恶劣的地域,这为输电线路后期的维护工作带了很多的困难,并且我国的南北地域差异较大,南方大部分多为山区,这也导致在严冬时期我国的这些地区出现架空输电线路覆冰,给架空输电运输带来一定的损坏,更严重的造成电网结构破坏,安全运行严重受到威胁。
也正是由于环境恶劣导致线路维修人员不能顺利的工作,通常情况下维护人员只能通过使用绝缘棒去清除电线上的覆冰,并且这样的方式还有很大的危险性。
根据国外数据表明,一些国家的地理情况与我国的情况类似,为了保证电力系统运行的可靠性,提高高压输电线路的除冰效率,开发出一种可以替代人工作业的除冰设备,而这套设备也是我国着重研究的热点。
因此,加强研制安全有效的除冰机械设备对我国的电力发展有着重要意义。
1 浅析高压输电线路除冰机器人的基本概念机器人它是一个较为复杂的机电一体化系统,通过应用先进的计算机技术,将机械结构,通信,自动控制,捕捉等多项技术领域进行融合,但机械结构是整个设备的系统基础,也是目前机器人制造的最大障碍。
基于这种情况,科技人员研发出了一种新型实用的高压输电线路除冰机器人,并且具有以下几点功能;其一能够在高压输电线路上以预想的速度进行稳定攀爬;其二整个机械结构具有一定的爬坡能力;其三能够很好的跨越高压输电线路上的线夹,绝缘子等相关障碍物体;其四能够有效的去除高压输电线上覆盖的冰雪。
电力系统输电线路抗冰除冰技术研究进展综述
( 江 大 学 电气 工 程 学 院 , 江 杭 州 3 02 ) 浙 浙 l0 7
摘 要 : 电线路 覆冰将 对 电力 系统产 生严 重 的危 害 , 于此 , 输 基 总结 了清 除线路覆 冰 的热 力融 冰技 术 、 机 械 除冰技 术 和通过 改 变导线 结构 、 材料 的其他 辅 助手段 除冰的 方法 , 并结 合我 国线路 覆冰 事故 的具体 情 况进行 了可行 性讨 论 分析 , 总结 了现 有各项 除 冰技 术 的 不足 , 指 出了今后 发展 的趋 势和研 究方 向。 并
冰成 块脱 落 。
类似 天 气对我 国 电力 系统 造 成 的破坏 , 必要 对 输 电 有
讨论 较 多 的热力 融 冰 法 有短 路 电流 融 冰 、 频 高 高 压激励 融 冰 、 流 电流融 冰 、 流调 度融 冰等 。 直 潮
1 1 短 路 电 流 融 冰 .
线 路除 冰技术 发展 现状 进行 回顾 。为应 付输 电线 路覆
S HEN Tu g n —a g
( ol ef Eeti l gneig,Z ein nvri C l g , lcr a e ) c En ier n hja g U i st e y,Ha g h u3 0 7,C ia ) n zo 2 1 0 hn
Absr c t a t:I e a c c c umu ain o rns iso l sma e u ti a a e o po rs se . M a y sude b utde ii g we e un- lto n ta m s in i y r s l n d m g t we y tm ne n t is a o ・c n r
Ke r s niiig eiig rn mi in l e ;iea c muain;drc urn ( ywo d :a t cn ;d — n ;ta s s o i s c c u lt ・ c s n o ietc re t DC);p we o o rf w l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
需要解决如下技术问题。 2.2.1机器人运动学和动力学建模与分析
机器人运动学和动力学特性的准确建模是实
现机器人运动控制和导航避障的前提。除冰机器人
动力学建模需要重点考虑以下问题。 (1)必须考虑机器人与柔性作业环境间的非线
性动力学耦合特性。在进行除冰机器人动力学研究 时,必须考虑柔性作业环境对除冰机器人动力学特 性的影响,即大垂度柔性输电导线与相对刚性较大 的机器人之间的刚柔耦合特性。机器人本身是一个 多刚体动力学系统,而高压输电线路相邻两塔间的 万方数据
关键技术如下所述。
2.1
实现直线越障和变向运动时,由于姿态调整引起重 心不稳定,会通过夹紧臂传给导线一个反作用力, 这样,除冰机器人与作业环境间就构成了一个强耦 合系统。 (2)考虑机械臂和关节弹性效应的机械臂刚一 柔耦合动力学特性研究。为了提高作业效率,机器 人应尽可能轻质高速,为保证在高速高效的除冰作
础,输电线路在线除冰机器人本体设计需满足如下
几项基本技术指标:①可实现在柔性输电线缆上 的平稳爬行,具有爬坡、下坡和制动能力;②具 有防滑能力;③故障自保安措施和防摔落机制; ④具有足够的空间和负载能力,可模块化搭载相 应除冰装置;⑤较小的质量和体积,便于携带和 投送;⑥具有足够灵活的越障能力,可避越高压 线路上的防震锤、线夹、绝缘子、线塔等障碍,并 在越障时保证机器人姿态平稳,并保持与导线和线
性的影响,需要结合变结构控制、鲁棒控制、自适 应控制、神经网络、模糊控制或视觉伺服控制等先 进控制方法ll引,研究不确定条件下除冰机器人的精
确运动伺服控制问题。 除冰机器人运行过程中需要跨越的主要障碍 物包括:绝缘子、防振锤和引流跳线(图7)。这通常
输电线除冰机器人跟一般工业机器人不同,它 悬挂在柔性输电导线上,在运行过程中机器人的姿 态时刻发生着变化,呈现出多体系三维空间的复杂
档距大到几百甚至上千米,弧垂可达几十米,是大 垂度柔索结构,具有柔性大且结构阻尼小的特点。 输电线路自身在风载等环境激励作用下会产生多
种形式的振动,线路的振动将通过机器人与导线之 间的边界耦合传递到机器人本体:同时,机器人在
殊的要求,现有巡线机器人技术无法满足其设计
要求。
2除冰机器人关键技术问题
输电线路在线除冰机器人是机械、电子、计算 机、通信和自动化等多学科交叉的产物,目前国内 外尚没有成熟的技术可供借鉴。由于工作环境复 杂,所以各项技术实现难度较大,需要突破的一些
of
robot
011
overhead
transmission line
a托surveyed.Key technologies complex
de-icing robot
are
discussed
in detail.including high
reliability of motion mechanism design
Review
on
Key Technology of De—icing Robot Running Transmission Line WEI
YIN Feng YANG Yimin TAN Lei
on
Overhead
WANG
Yaonan
Shuning
CAO
Wenming
(School
of Control Science and Engineering,Hunan University,Changsha 410082)
内外对除冰机器人的研究报道较少,较早出现的输 电线路除冰机器人装置包括加拿大魁北克水电研 究院于2000年开始研制的LineROVer遥控小车”“。 该遥控小车起初用于清除电力传输线地线上的积
冰,后逐渐发展为用于线路巡检、维护等多用途移 动平台,通过安装不同的工作头可完成架空线视 觉、红外检查、压接头状态评估、导线清污和线路 除冰”叫(图1)等不同作业任务,其缺点在于无越障 能力,只能在两线塔之间作业。通过技术的不断改 进”’”J,研究组于2006年研制出结构更为复杂、
图7输电线路结构示意图
在设计控制系统时可采用如图8所示的分层控 制系统结构,即将总系统分为地面监控层(管理层)
和机器人本体控制层(规划层和执行层),分别实现
除冰机器人运动机构和除冰执行机构的伺服控制。
2011年12月
王耀南等:输电线路除冰机器人关键技术综述
33
杆塔等障碍,行走环境介于结构化和非结构化环境
・国家“十一五”科技支撑计划资助项111(2008BAF36801).20110308 收到初稿,20110927收到修改稿
作业时,还可作巡线用途,其发展前景广阔。
万方数据
2011年12月
王耀南等:输电线路除冰机器人关键技术综述
输电线路除冰机器人是电力特种机器人研究
领域的最新研究课题之一,国内外对于除冰机器人 研究尚停留在起步阶段,各项技术研究还未建立统 一的标准。为此,本文在简要介绍除冰机器人研究 取得的阶段性成果基础一f:,将着重分析除冰机器人 研究中的关键技术问题,以期建立一个统一的研究
Abstract:Ice-coated transmission lines seriously harm the safety and stability of the
power鲥d.Compared
Can
with the traditional emerging research
methods ofde-icing,de—icing robots have advantages in terms ofenergy consumption,cost and safety,et a1.As area,international research necessary running
功能更加完备,具备越障功能的LineScout输电线
巡检机器人““(图2),但该巡检机器人不具备除冰 功能。
图6三臂除冰机器人
作为输电线路作业机器人之一,巡线机器人研
图2加拿大巡线机器人
制过程积累的技术经验为除冰机器人研究提供了
万方数据
32
机械工程学报
第47卷第23期
良好的借鉴,但是,由于除冰机器人工作在恶劣环 境中,对其结构、功能、动力、通信等方面都有特
大的局限性;随着机器人技术的发展,各种巡线机
器人已成功用于替代人工完成对输电线的巡检任
网覆冰现象严重,如何加强和改善输电线路的抗覆 冰能力,加快研究有效的线路抗冰融冰技术,最大
务,因此,采用机器人进行输电线路除冰已成为可
能。与传统除冰方法相比,采用机器人除冰具有无 人员伤亡、无须停电和转移负载等优点,无需除冰
wide range of field work;remote communication,monitoring,teleoperation under the conditions of long distance
and
strong
electromagnetic
interference;special protection mechanisms under poor working conditions.Development trend and research
框架,为除冰机器人后续研究工作提供参考。
1国内外研究现状
目前输电线路机器人主要应用于线路巡检“。J,
巡线机器人的研究始于20世纪80年代末,日本、
加拿大、美国等发达国家先后开展了巡线机器人的 研究工作”…。90年代末,国内的一些研究机构和 高等学校陆续开展了巡线机器人的研究工作““…,
并取得一定的研究成果。与巡线机器人相比较,国
to
on
an
the de—icing robot iS still in its
infancy,and
no
mature technology
be used for reference.Thus it is
review current
achievements systematically and
On
intensively.State・・of-the—・art in research and application of de・・icing
第47卷第23期
201
机械工程学报
JOURNAL OF
Vbl.47 Dec.
NO.23 2 O l 1
1年12月
MECHANICAL
ENGINEERING
DoI:10.3901,JME.2011.23.030
输电线路除冰机器人关键技术综述宰
王耀南 魏书宁 印 峰 杨易曼 谭
磊
曹文明
(湖南大学电气与信息工程学院长沙410082)
arc
direction for deicing robot
suggested in the end. De・icing
Key words:Inspection robot
robot
De-icing mechanism
Transmission line
Surmount obstacle
限度地避免和防止冰灾对输电线路造成的危害,已
在国内,山东电力研究院与加拿大魁北克水电
研究院进行合作,对LineROVer小车在能源动力、
远程通信与控制、防水性能等方面做了技术改进, 完善了机构的性能,但仍不具备越障能力…1(图3)。 湖南大学在国家科技支撑计划的资助下,联合国防 科技大学、武汉大学和山东大学等多家单位,研制 开发了单体除冰机器人(图4)和可越障除冰的两臂 除冰机器人(图5)、三臂除冰机器人(图6),积累了 一定的研发经验。
摘要:输电线路覆冰严重危害到电网的安全稳定运行,与传统除冰方法相比,采用机器人除冰在能耗、成本及安全性等方面 具有优势。作为一个新兴的研究领域,国内外对除冰机器人的研究尚处在起步阶段,并没有成熟的技术可借鉴,因此有必要 对现有研究成果进行系统分析和深入总结。回顾国内外高压输电线路除冰机器人的研究和应用现状,详细探讨了除冰机器人 复杂柔性结构输电线缆上的高可靠性运动机构设计;复杂非结构化环境下的机器人自主行为控制与导航;无损伤高效除冰机 构;野外大范围长时间工作的持续动力供给;远距离强电磁干扰条件下的机器人远程通信、监测和遥操作;恶劣工作环境中 的本体特殊保护机制等关键技术问题。给出除冰机器人下一阶段研究方向的建议。 关键词:巡线机器人除冰机器人除冰机构输电线路越障 中图分类号:TM932