一些CPU设计实例
六章CPU设计

下地址控制编码方式
一般情况下后继微指令旳地址有下列几种给出方式:顺序递增法:将µPC设置成可实现自动加1旳功能,每当完毕目前指令旳执行,就以µPC +1后旳值为地址在控制存储器中取下一条微指令。直接给出法:下一条微指令旳地址直接取自微指令中旳下地址字段。分支转移法:在包括分支转移旳微指令中常设置一种条件选择子区域,用于指出哪些鉴定条件被测试,与此同步转移地址被存储在下地址字段。当转移条件满足时,将下地址字段旳内容读入到µPC中,取下一条微指令,实现微程序转移。若转移条件不满足,微程序则顺序执行。微程序入口地址旳形成:每条机器指令所相应旳微程序旳入口地址(首地址),一般由指令旳操作码所决定。在机器加电后,第一条微指令旳地址一般是由专门旳逻辑电路生成,也能够采用由外部直接输入旳形式取得。
操作控制编码方式
在操作控制字段一般涉及一种或多种操作控制域,每个控制域可控制一种或一组控制信号旳生成,根据控制信号是直接生成于控制域还是译码生成控制信号旳不同可分为下列几种形式。直接控制法:操作控制字段旳每一位都与一种独立控制信号相相应。若目前微指令旳某一位ki=1,则与之相应ci控制信号有效,不然ci控制信号无效。分段编码控制法:在微程序级别,许多微操作是能够并行执行。一般采用将微指令旳操作控制字段提成k个相互独立旳控制域,每一种控制域存储一组微操作,每一种编码相应一种微操作,每一种微操作都能够与其他控制域所存储旳任意一种微操作并行执行,但在组内旳微操作之间是互斥旳,不允许在同一时间段内发生或有效。分段间接编码控制法:在微指令格式里,假如一种字段旳含义不只决定本字段编码,还兼由其他字段决定,则可采用分段间接编码控制法。此时一种字段兼有两层或两层以上旳含义。其他方式:在实际微指令中操作控制编码并不是只单独采用上述三种编码方式中旳一种,而是将上述三种混合使用,以确保能综合考虑指令旳字长、灵活性和执行微程序旳速度等方面旳要求。
CPU设计示例
2013.10
CPU的指令集(续)
操作码 OP 指令 IR (15 . .12) 格式
1101 4
指令的助记符
Read Addr
操作的内容
PC := PC+1 ; 取本指令的后半部 ; R 0 ( addr ) ; PC := PC+1 ; (为取下一条指令准备地址) PC := PC+1 ; 取本指令的后半部 ; Addr ( R 0 ) ; PC := PC+1 ; (为取下一条指令准备地址) 无操作, PC 保持不变 ;
1110
4
Write
Addr
1111
3
Stop
2013.10
11
把指令执行过程细分到节拍
细分的要求:
规定当前节拍(状态)下应执行的操作 规定下一个节拍(状态)是什么 这实际上是有限状态机的描述风格
细分结果不唯一:
设计者追求的目标 —— 性能/价格 设计者的风格
CPU框图(数据通路+控制器) 和存储器的时序配合关系
cs data
写数据: CPU提前把数据送到数据
线M_data_out; 令 Write_Read = 1 ,使 写入使能; 写入是时钟后沿起作用; 读数据: 令 Write_Read = 0 ,使 读出使能; MEM将数据输出到M-q, 再到M_data_in;;
Add Rx, Ry Sub Rx, Ry AND Rx, Ry OR Rx, Ry XOR Rx, Ry Shr Rx Shl Rx
2013.10
9
CPU的指令集(续)
操作码 OP 指令 IR (15 . .12) 格式
8位CPU的设计与实现
计算机组成原理实验题目8位CPU得系统设计学号1115106046姓名魏忠淋班级 11电子B 班指导老师凌朝东华侨大学电子工程系8位CPU得系统设计一、实验要求与任务完成从指令系统到CPU得设计,编写测试程序,通过运行测试程序对CPU设计进行正确性评定。
具体内容包括:典型指令系统(包括运算类、转移类、访存类)设计;CPU结构设计;规则文件与调试程序设计;CPU调试及测试程序运行。
1。
1设计指标能实现加减法、左右移位、逻辑运算、数据存取、有无条件跳转、内存访问等指令;1、2设计要求画出电路原理图、仿真波形图;二、CPU得组成结构三、元器件得选择1.运算部件(ALU)ALU181得程序代码:LIBRARY IEEE;USEIEEE、STD_LOGIC_1164。
ALL;USEIEEE、STD_LOGIC_UNSIGNED.ALL;ENTITY ALU181 ISPORT(S: IN STD_LOGIC_VECTOR(3 DOWNTO0 );A:IN STD_LOGIC_VECTOR(7 DOWNTO0);B: INSTD_LOGIC_VECTOR(7DOWNTO 0);F : OUT STD_LOGIC_VECTOR(7 DOWNTO 0);ﻩCOUT:OUTSTD_LOGIC_VECTOR(3 DOWNTO0);M :INSTD_LOGIC;CN : IN STD_LOGIC;CO,FZ:OUT STD_LOGIC );END ALU181;ARCHITECTURE behav OF ALU181 ISSIGNALA9 :STD_LOGIC_VECTOR(8DOWNTO 0);SIGNAL B9 : STD_LOGIC_VECTOR(8 DOWNTO0);SIGNALF9: STD_LOGIC_VECTOR(8 DOWNTO0);BEGINA9<= '0'& A; B9 <= ’0’&B;PROCESS(M,CN,A9,B9)BEGINCASE S ISWHEN "0000" =〉IF M='0’THEN F9<=A9 + CN ; ELSE F9<=NOT A9; E NDIF;WHEN "0001" =>IF M='0’THEN F9<=(A9 orB9)+ CN ;ELSE F9〈=NOT(A9OR B9);END IF;WHEN ”0010"=> IF M=’0’THEN F9〈=(A9 or(NOT B9))+C N; ELSE F9<=(NOT A9) ANDB9; ENDIF;WHEN "0011"=> IF M='0’THEN F9<= ”000000000"—CN ;ELSEF9<="000000000”;END IF;WHEN"0100”=> IFM='0'THENF9<=A9+(A9 ANDNOT B9)+ CN; ELSE F9〈=NOT(A9 ANDB9);END IF;WHEN ”0101”=>IFM='0' THENF9<=(A9orB9)+(A9 AND NOTB9)+CN ;ELSEF9<=NOT B9; END IF;WHEN"0110" =>IFM=’0’THEN F9〈=(A9- B9) -CN ;ELSE F9〈=A9XOR B9; ENDIF;WHEN”0111"=>IF M='0' THEN F9〈=(A9 or(NOT B9)) -CN ;ELSE F9<=A9 and (NOT B9); END IF;WHEN"1000" =>IFM='0'THEN F9<=A9+ (A9AND B9)+CN ; ELSE F9〈=(NOTA9)and B9; END IF;WHEN "1001”=> IF M=’0’THEN F9〈=A9+ B9 + CN ; ELSE F9<=NOT(A9 XOR B9); ENDIF;WHEN ”1010"=>IF M=’0'THEN F9〈=(A9or(NOTB9))+(A 9AND B9)+CN ; ELSEF9<=B9;END IF;WHEN "1011”=〉IF M='0'THENF9<=(A9 AND B9)- C N; ELSE F9<=A9 ANDB9; ENDIF;WHEN ”1100”=〉IF M='0'THENF9<=(A9 +A9) + CN; ELSEF9〈="000000001"; END IF;WHEN "1101”=〉IF M='0' THEN F9〈=(A9or B9)+ A9 + CN;ELSEF9〈=A9 OR (NOTB9); END IF;WHEN "1110"=>IF M='0'THENF9<=((A9 or (NOTB9)) +A9) + CN; ELSE F9〈=A9OR B9;END IF;WHEN”1111”=〉IFM=’0'THENF9<=A9 —CN ;ELSE F9<=A9 ; END IF;WHEN OTHERS=> F9<= ”000000000" ;ENDCASE;IF(A9=B9) THENFZ<=’0';END IF;ﻩEND PROCESS;F<=F9(7DOWNTO0) ;CO<= F9(8) ;COUT<="0000"WHEN F9(8)=’0'ELSE"0001";END behav;ALU得原理图:2、微控制器实现信息传送要靠微命令得控制,因此在CPU 中设置微命令产生部件,根据控制信息产生微命令序列,对指令功能所要求得数据传送进行控制,同时在数据传送至运算部件时控制完成运算处理。
4-简单cpu设计_106004227
第4章简单MIPS CPU设计4.1引言在本章中,我们为MIPS指令集的两种不同实现方式建立数据通路和控制单元。
我们将要设计的实现方式包含了MIPS指令集的一个核心子集:存储器访问指令:取字(1w)和存储字(sw)。
算术逻辑指令:加法(add),减法(sub),与运算(and),或运算(0r)和小于则设置(slt)。
分支指令:相等则转移(beq)和跳转(j)。
这个子集没有包括所有的整数指令(如缺乏乘除指令),也不包括任何浮点数指令。
但是,在建立数据通道和设计控制部分时用到的关键原理都会得以体现。
其余指令的实现也是类似的。
在学习此实现方式时,我们将有机会看到指令集如何影响实现方式的多个方面。
在本章及下一章中用于实现MIPS子集的大多数概念与很多计算机的基本构造思想是一致的。
4.1.1 实现方式概述在前一章节中,我们学习了MIPS的核心指令,包括整数算术逻辑指令、存储访指令及分支指令。
这些指令的实现过程大致相同,而与具体的指令类型无关。
实现每条指令的前两步是一样的:1)程序计数器(PC)指向指令所在的存储单元,并从中取出指令。
2)通过指令字段内容,选择读取一或两个寄存器。
对于取字指令,只需读取一个寄存器,而其他大多数指令要求读取两个。
这两步之后,为完成指令而进行的步骤则取决于具体的指令类型。
幸运的是,对三种指令类型(存储访问、算术逻辑、分支)的每一种而言,其动作大致相同,与具体操作码无关。
即使是不同类型的指令,也有一定的共性。
例如,所有类型的指令在读取寄存器后,都要使用算术逻辑单元(ALU)。
存储访问指令用ALU计算地址,算术逻辑指令用来执行运算,分支指令用ALU进行比较。
可以看出,指令的简洁和规整使许多指令的执行很相似,因而简化了实现过程。
使用ALU之后,不同类型指令需要进行不同的操作。
存储访问指令需要对存储单元进行读出或写入;算术逻辑指令需要将ALU产生的数据写回寄存器中;而分支指令会根据比较的结果,决定是否需要更改下条指令的地址。
清华大学 微机原理课件 CPU设计ALU

ALU电路设计
(2)移位器
采用2:1多路选择器构造的8位右移位器
A7 A6 A5 A4 A3 A2 A1 A0 S2 S1 S0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0 R7
1
0 R6
1 R5
0
1 R4
0
1 R3
0
1 R2
0
1 R1
0
1 R0
0
MSB的输入如何? 32位移位器需要多少级?
CPU逻辑设计
—— ALU电路设计
1
MIPS对ALU的需求
Add, AddU, Sub, SubU, AddI, AddIU =>带溢出检测和反向器的补码加法器 SltI, SltIU(Set Less than) =>带反向器的补码加法器,检测结果的符号 And, Or, AndI, OrI =>逻辑或、逻辑与
B12 B11 B10 B9
B11 B10 B9 B8
B6 B5 B4 B3
B5 B4 B3 B2
B4
B3 B2
B1
B3
B2 B1
B0 S1 S0
3
2
1 0
3
2
1 0
3
2
1 0
3
2
1 0
3
2
1 0
3
2
1 0
3
2
计算机组成原理CPU设计实验报告
计算机组成原理CPU设计实验报告课程设计题目:16位CPU设计学院: 信息学院班级:电子A班学号:1115102015姓名:方茹1目录1 实验方法 ..................................................................... . (4)2 总体说明 ..................................................................... ................................................. 5 2.1指令系统: .................................................................... .......................... 5 2.1.1指令格式分类(按指令字长和操作数不同): ...................................................... 5 2.1.2具体指令汇总表: .................................................................... .......................... 6 2.1.3相关指令流程图: .................................................................... .......................... 6 2.1.4指令数据通路的构建: .................................................................... ................... 8 2.1.5指令的分组及节拍: .................................................................... ..................... 12 2.1.6指令执行状态图:(见下页)..................................................................... ........... 13 2.1.7具体微指令: .................................................................... ............................... 13 2.2 系统整体介绍 ..................................................................... .................. 16 2.2.1系统基本模块划分 ..................................................................... ....................... 16 2.2.2总体结构图:(见下页)..................................................................... (17)3 CPU的控制逻辑与具体数据通道设计 ..................................................................... ......18 3.1取指令逻辑的设计 ..................................................................... .. (19)3.1.1指令地址的保存 ..................................................................... (19)3.1.2指令存储器 ..................................................................... .................................. 20 3.1.3下一条指令地址的计算 ..................................................................... ................ 20 3.2指令译码逻辑的设计...................................................................... ...................... 21 3.3指令执行逻辑的设计...................................................................... ...................... 22 3.4存储器访问逻辑的设计 ..................................................................... ................... 23 3.5结果写回逻辑的设计...................................................................... ...................... 24 3.6单周期CPU的总成...................................................................... (25)4各部分说明 ..................................................................... .............................................26 4.1ALU .................................................................................................................... 26 4.2数据选择器BUS_MUX ................................................................ ........................ 28 4.3器件T1 ..................................................................... .......................................... 30 4.4标志寄存器FLAG_REG ............................................................... ........................ 31 4.5T2: .................................................................... ................................................ 33 4.6程序计数器PC ..................................................................... ............................... 33 4.7地址寄存器AR和指令寄存器IR: .................................................................... .. 34 4.8寄存器、寄存器组和寄存器的选择.......................................................................36 4.9一位控制信号/WR .................................................................... ........................... 37 4.10 节拍发生器 ..................................................................... .................................. 37 4.11控制逻辑 ..................................................................... ...................................... 39 4.12T3...................................................................... ................................................ 42 4.13REG_OUT ......................................................................................................... 43 4.14存储器 ..................................................................... .......................................... 44 4.15总线选择器 ..................................................................... .. (45)24.16REG_TEST ............................................................... .. (46)5附录: .................................................................... .. (47)附录A:组员分工: .................................................................... .. (47)附录B:组员设计总结: .................................................................... . (47)31 实验方法实验要完成的工作主要包括:指令系统的设计,FPGA-CPU的整体结构设计及其细化,逻辑设计的具体实现(VHDL语言程序的编写),软件模拟,以及硬件调试。
精简8位cpu设计报告
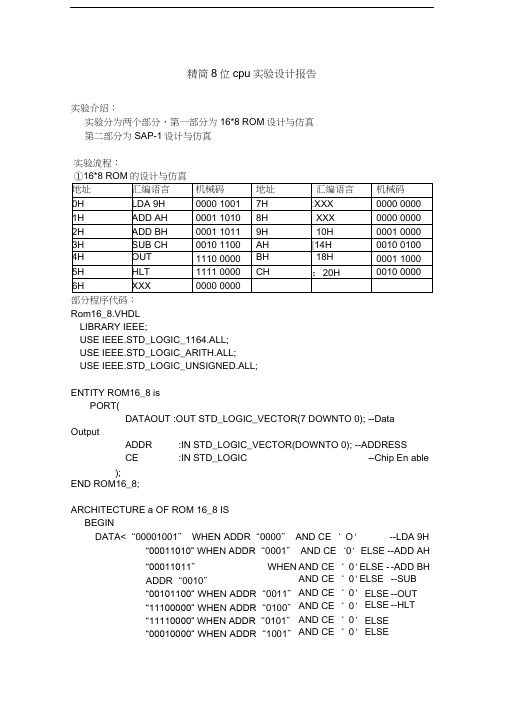
“00011011” WHEN ADDR “0010”“00101100” WHEN ADDR “0011”“11100000” WHEN ADDR “0100”“11110000” WHEN ADDR “0101” “00010000” WHEN ADDR “1001”AND CE ‘ 0'E LSE - -ADD BH AND CE ‘ 0' E LSE --SUB CH AND CE ‘ 0' ELSE --OUT AND CE ‘ 0' ELSE --HLT AND CE ‘ 0' ELSEAND CE ‘ 0' ELSE精简8位cpu 实验设计报告实验介绍:实验分为两个部分,第一部分为16*8 ROM 设计与仿真 第二部分为SAP-1设计与仿真 实验流程:①16*8 ROM 的设计与仿真部分程序代码:Rom16_8.VHDL LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL; USE IEEE.STD_LOGIC_ARITH.ALL;USE IEEE.STD_LOGIC_UNSIGNED.ALL;ENTITY ROM16_8 isPORT(DATAOUT :OUT STD_LOGIC_VECTOR(7 DOWNTO 0); --DataOutputADDR :IN STD_LOGIC_VECTOR(DOWNTO 0); --ADDRESS CE :IN STD_LOGIC --Chip En able );END ROM16_8;ARCHITECTURE a OF ROM 16_8 IS BEGINDATA<“00001001” WHEN ADDR “0000” AND CE ‘ O '“00011010” WHEN ADDR “0001” AND CE ‘0' ELSE --ADD AH--LDA 9H“00011000”WHEN ADDR=“1011”AND CE=‘0'ELSE“00100000”WHEN ADDR=“1100”AND CE=‘0'ELSE“00000000”;END a;程序说明:rom的使能CE只有为0时,才接受读数据的命令。
16位实验CPU设计实例介绍
16位实验CPU设计实例开放式CPU指的是CPU在一片FPGA芯片中构成,它的指令系统和CPU内部结构可以由使用者根据需要设计,并且能够在TEC-CA上进行调试的CPU。
实验CPU是学生为掌握计算机的工作原理而设计的CPU,主要针对基本原理而不强调完备性。
这样的CPU可以复杂一些,也可以简单一些,视学生水平而定。
本章中介绍的实验CPU实例是针对第6章计算机组成原理实验而设计的,使用者可在此基础上根据自己的需要进行适当增减。
计算机组成原理实验除了进行计算机各部件的实验外,最重要的是使学生掌握计算机整机的工作原理。
我们力求通过这个实验CPU设计实例,使学生能够深入掌握计算机的整机工作原理。
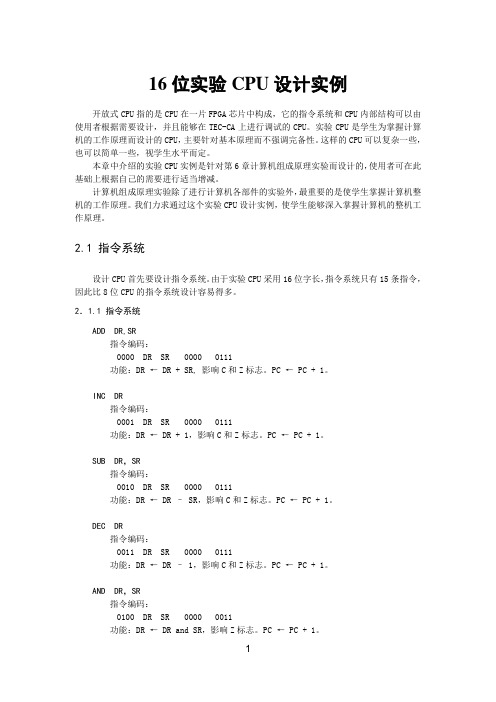
2.1 指令系统设计CPU首先要设计指令系统。
由于实验CPU采用16位字长,指令系统只有15条指令,因此比8位CPU的指令系统设计容易得多。
2.1.1 指令系统ADD DR,SR指令编码:0000 DR SR 0000 0111功能:DR ← DR + SR, 影响C和Z标志。
PC ← PC + 1。
INC DR指令编码:0001 DR SR 0000 0111功能:DR ← DR + 1,影响C和Z标志。
PC ← PC + 1。
SUB DR,SR指令编码:0010 DR SR 0000 0111功能:DR ← DR – SR,影响C和Z标志。
PC ← PC + 1。
DEC DR指令编码:0011 DR SR 0000 0111功能:DR ← DR – 1,影响C和Z标志。
PC ← PC + 1。
AND DR,SR指令编码:0100 DR SR 0000 0011功能:DR ← DR and SR,影响Z标志。
PC ← PC + 1。
OR DR,SR指令编码:0101 DR SR 0000 0011功能:DR ← DR or SR,影响Z标志。
PC ← PC + 1。
NOT DR指令编码:0110 DR SR 0000 0011功能:DR ← not DR,影响Z标志。
CPU设计示例

指令的助记符
Idle Load Data Move Rx, Ry
操作的内容
无操作, 无操作,PC := PC+1; (为取下一条指令准备地址) ; 为取下一条指令准备地址) R0 ← I ; (立即数 I 送 R 0 ) PC := PC+1; ; Rx ← (Ry) ; PC := PC+1; ) ; Rx ← (Rx) + (Ry) ; PC := PC+1; ) ) ; Rx ← (Rx) – (Ry) ; ) ) PC := PC+1; ; Rx ← (Rx) AND (Ry) ; PC:= PC+1; ) ) ; Rx ← (Rx) OR (Ry) ; PC : =PC+1; ) ) ; Rx ← (Rx) XOR (Ry) ; PC := PC+1; ) ) ; Rx ← (Rx)逻辑右移 1 位 ; ) Rx ← (Rx)逻辑左移 1 位 ; ) PC := PC+1; ; PC : = PC+1; ;
St_2
Rx ← (Rx) + (A); Rx ← (Rx) - (A); Rx ← (Rx) OR (A); Rx ← (Rx) XOR (A); Ry ← (Rx); THEN NULL; St_3; Write_Read ← '0';
THEN Rx ← (Rx) AND (A); THEN THEN
14
2011.10 .
每一个状态下的操作和状态转换
当前 状态 执行操作 次态及与读下一条 指令有关的操作 取指令 IR(15..8)← M_data_in R0 ←〞0000〞|| IR(11..8) ; Rx ← (Ry); Rx ← (Rx)逻辑右移 1 位; Rx ← (Rx)逻辑左移 1 位; A ← (Ry); A ← (Ry); A ← (Ry);
CPU设计
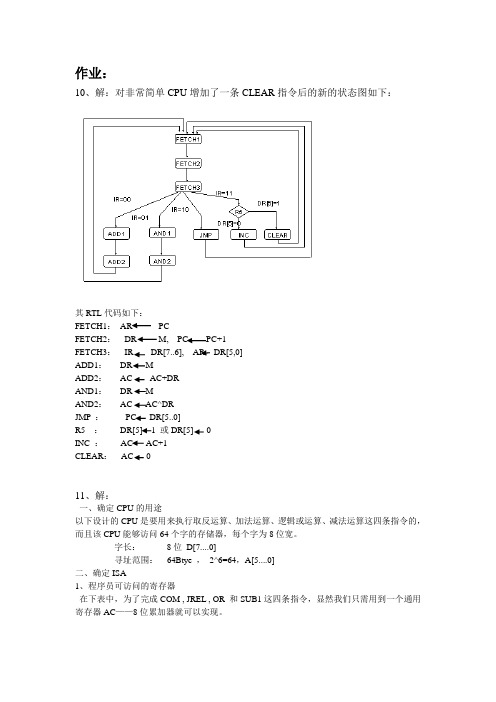
作业:10、解:对非常简单CPU增加了一条CLEAR指令后的新的状态图如下:其RTL代码如下:FETCH1:AR PCFETCH2:DR M, PC PC+1FETCH3:IR DR[7..6], AR DR[5,0]ADD1:DR MADD2:AC AC+DRAND1:DR MAND2:AC AC^DRJMP :PC DR[5..0]R5 :DR[5] 1 或DR[5] 0INC :AC AC+1CLEAR:AC 011、解:一、确定CPU的用途以下设计的CPU是要用来执行取反运算、加法运算、逻辑或运算、减法运算这四条指令的,而且该CPU能够访问64个字的存储器,每个字为8位宽。
字长:8位D[7....0]寻址范围:64Btye ,2^6=64,A[5....0]二、确定ISA1、程序员可访问的寄存器在下表中,为了完成COM , JREL , OR 和SUB1这四条指令,显然我们只需用到一个通用寄存器AC——8位累加器就可以实现。
指令操作码操作COM 00XX XXXX AC AC' (取反)JRET 01AA AAAA PC PC+00AA AAAAOR 10AA AAAA AC AC^M[00AA AAAA]SUB1 11AA AAAA AC AC—M[00AA AAAA]—12、CPU还需要一些其他的寄存器以便完成取指令(或数据)、译码和执行指令所必须的内部操作,最基本的寄存器有:AR(地址寄存器)——6位,由A[5.....0]向存贮提供地址PC (程序计数器)——6位,指出下一条指令的地址DR(数据寄存器)——8位,通过D[7....0]从存贮器接受指令和数据IR(指令寄存器)——2位,存放从存贮器中取回的指令的操作码部分。
三、为CPU设计状态图为了确定CPU的状态图,需对每条指令作如下分析:1、从存贮器取出指令(所有指令都相同)2、指令译码3、指令执行从存贮器中取出指令:1、原理:根据冯. 诺依曼型机的原理(指令在存贮器中按顺序存放.......), 在CPU能执行指令之前,它必须将这条指令从存贮中取出,CPU通过执行如下的操作序列完成这个任务的:【1】选择存贮单元由A[5... 0]确定【2】对A[5... 0]译码、延迟、并向存贮器发一个信号(如READ或R/W'=1),使存贮器将此指令输出到它的输出引脚。
第4章 CPU的设计方法及范例
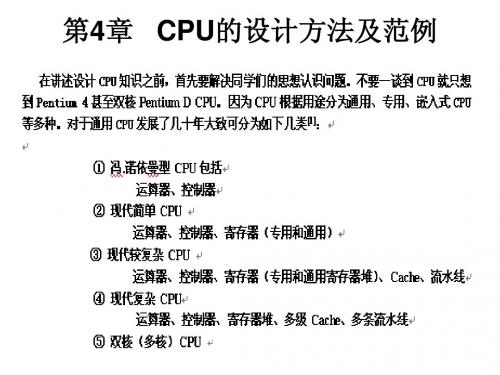
非常简单CPU不具有应用价值,仅用来说明 设计过程。不过,只要我们能正确设计出只有4条 指令的CPU,就可以设计出拥有40条指令的CPU, 甚至更多·· ·。难道这样还有怀疑吗?当然不能期 望马上就有创新,但这个CPU是拥有自主知识产 权的。或者有些同学会这样想,我以后并非从事 硬件的工作,更不可能从事设计CPU的专业,我 也相信这是事实。但是,这绝对有利于我们掌握 计算机的工作原理,也有利于从事各种软、硬件 开发和计算机科学等领域的研究、教学工作。
图4.9 通用CPU的状态图
其实CPU就是一个复杂的有限状态机 【冯· 诺依曼机的理论是基于图灵(Turing) 机理论的,而图灵机就是一个有限状态 机】。通过确定状态及其对应的微操作, 就可明确CPU为了取数据(或指令),指 令译码和执行指令集中每一条指令所必须 要完成的步骤。 问题:什么是图灵机理论?
1966年美国计算机协会设立“图灵奖”,被视为计算机科学界的最高荣誉
它的“纸带”相当于作业薄,读写头相当于人的眼 睛、手、笔,对于输入集{x1,x2,…xn},r(i, 0)= xi,i= 1,2,..n相当于“抄题”,而映射f 的读写变换相当于人脑判断确定下一步的行为且 指挥手和笔如何去动作和书写。它高度概括地回 答了什么是运算,不但为计算复杂度理论提供了 研究工具,而且为20世纪50年代计算机的设计提 供了思想基础,即Moore机和Mealy机。【注:当 出现状态Sy或Sn时,即得到了Turing 机的运算结 论Yes或No,这时即S(t)∈{ Sy,Sn }时停机】
二、建立数据通路的原理和方法
1.存贮器数据通路的原理
2.CPU内部的数据通路(两种不同的方案)
三、CPU内部寄存器控制信号的定义和确定方法
2.决定每个部件应完成的功能(详见图4.14)
8位超精简CPU设计参考Lattice mico8

LatticeMico8 Processor Reference ManualDecember 2012CopyrightCopyright © 2012 Lattice Semiconductor Corporation.This document may not, in whole or part, be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form without prior written consent from Lattice Semiconductor Corporation.TrademarksLattice Semiconductor Corporation, L Lattice Semiconductor Corporation (logo), L (stylized), L (design), Lattice (design), LSC, CleanClock, Custom Movile Device, DiePlus, E2CMOS, Extreme Performance, FlashBAK, FlexiClock, flexiFLASH, flexiMAC, flexiPCS, FreedomChip, GAL, GDX, Generic Array Logic, HDL Explorer, iCE Dice, iCE40, iCE65, iCEblink, iCEcable, iCEchip, iCEcube, iCEcube2, iCEman, iCEprog, iCEsab, iCEsocket, IPexpress, ISP, ispATE, ispClock, ispDOWNLOAD, ispGAL, ispGDS, ispGDX, ispGDX2, ispGDXV, ispGENERATOR, ispJTAG, ispLEVER, ispLeverCORE, ispLSI, ispMACH, ispPAC, ispTRACY, ispTURBO, ispVIRTUAL MACHINE, ispVM, ispXP, ispXPGA, ispXPLD, Lattice Diamond, LatticeCORE, LatticeEC, LatticeECP, LatticeECP-DSP, LatticeECP2, LatticeECP2M, LatticeECP3, LatticeECP4, LatticeMico, LatticeMico8, LatticeMico32, LatticeSC, LatticeSCM, LatticeXP, LatticeXP2, MACH, MachXO, MachXO2, MACO, mobileFPGA, ORCA, PAC, PAC-Designer, PAL, Performance Analyst, Platform Manager, ProcessorPM, PURESPEED, Reveal, SiliconBlue, Silicon Forest, Speedlocked, Speed Locking, SuperBIG, SuperCOOL, SuperFAST, SuperWIDE, sysCLOCK, sysCONFIG, sysDSP, sysHSI, sysI/O, sysMEM, The Simple Machine for Complex Design, TraceID, TransFR, UltraMOS, and specific product designations are either registered trademarks or trademarks of Lattice Semiconductor Corporation or its subsidiaries in the United States and/or other countries. ISP, Bringing the Best Together, and More of the Best are service marks of Lattice Semiconductor Corporation.Other product names used in this publication are for identification purposes only and may be trademarks of their respective companies.DisclaimersNO WARRANTIES: THE INFORMATION PROVIDED IN THIS DOCUMENT IS “AS IS” WITHOUT ANY EXPRESS OR IMPLIED WARRANTY OF ANY KIND INCLUDING WARRANTIES OF ACCURACY, COMPLETENESS, MERCHANTABILITY, NONINFRINGEMENT OF INTELLECTUAL PROPERTY, OR FITNESS FOR ANY PARTICULAR PURPOSE. IN NO EVENT WILL LATTICE SEMICONDUCTOR CORPORATION (LSC) OR ITS SUPPLIERS BE LIABLE FOR ANY DAMAGES WHATSOEVER (WHETHER DIRECT, INDIRECT, SPECIAL, INCIDENTAL, OR CONSEQUENTIAL, INCLUDING, WITHOUT LIMITATION, DAMAGES FOR LOSS OF PROFITS, BUSINESS INTERRUPTION, OR LOSS OF INFORMATION) ARISING OUT OF THE USE OF OR INABILITY TO USE THE INFORMATION PROVIDED IN THIS DOCUMENT, EVEN IF LSC HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. BECAUSE SOME JURISDICTIONS PROHIBIT THE EXCLUSION OR LIMITATION OF CERTAIN LIABILITY, SOME OF THE ABOVE LIMITATIONS MAY NOT APPLY TO YOU.LSC may make changes to these materials, specifications, or information, or to the products described herein, at any time without notice. LSC makes no commitment to update this documentation. LSC reserves the right to discontinue any product or service without notice and assumes no obligation to correct any errors contained herein or to advise any user of this document of any correction if such be made. LSC recommends its customers obtain the latest version of the relevant information to establish, before ordering, that the information being relied upon is current.Type Conventions Used in This DocumentConvention Meaning or UseBold Items in the user interface that you select or click. Text that you type into the user interface.<Italic>Variables in commands, code syntax, and path names.Ctrl+L Press the two keys at the same time.Courier Code examples. Messages, reports, and prompts from the software. ...Omitted material in a line of code.Omitted lines in code and report examples....[ ]Optional items in syntax descriptions. In bus specifications, the brackets are required.( )Grouped items in syntax descriptions.{ }Repeatable items in syntax descriptions.| A choice between items in syntax descriptions.ContentsIntroduction 1Architecture 3Register Architecture3General-Purpose Registers3Control and Status Registers4 Memory Architecture5Memory Regions5Memory Modes9Interrupt Architecture10Call Stack10Configuration Options 11Instruction Set 13Instruction Formats13Instruction Set Lookup Table14 Instruction Descriptions16Programming Model 37Data Representation37Procedure Caller-Callee Convention38 Register Usage38Stack Frame39Parameter Passing40Interrupt Convention41Acessing LatticeMico8 Memory Regions42 Scratchpad42Peripheral42PROM43C ONTENTSIndex 45Chapter 1 IntroductionThe LatticeMico8™ is an 8-bit microcontroller optimized for Field Programmable Gate Arrays (FPGAs) and Programmable Logic Device architectures from Lattice Semiconductor. It combines a full 18-bit wide instruction set with 16 or 32 general-purpose registers. It is suitable for a wide variety of markets, including communications, consumer, computer, medical, industrial and automotive. The core consumes minimal device resources— fewer than 250 Look-Up Tables (LUTs) in the smallest configuration—while maintaining a broad feature set.LatticeMico8 Features◆8-Bit Data Path◆18-Bit Instructions◆Configurable Instruction Memory (PROM)◆Internal, or external through the WISHBONE Interface◆Configurable to accommodate 256, 512, 1K, 1.5K, 2K, 2.5K, 3K, 3.5Kor 4K instructions◆Scratchpad Memory◆Internal, or external through the WISHBONE Interface◆Configurable up to 4Gbytes using paged bytes (256 bytes/page)◆Input/Output Peripheral Space through the WISHBONE Interface◆Configurable up to 4Gbytes using paged ports (256 ports/page)◆Minimum Two Cycles per Instruction◆Configurable 16 or 32 General-purpose Registers◆Configurable Call Stack sizeFigure1 on page2 shows the LatticeMico8 Microcontroller block diagram.I NTRODUCTION:Figure 1: LatticeMico8 Microcontroller CoreChapter 2ArchitectureThis chapter describes the LatticeMico8 register and memory architectureand explains the interrupt architecture and call stack.Register ArchitectureThis section describes the general-purpose and control and status registers ofthe LatticeMico8 architecture.General-Purpose RegistersThe LatticeMico8 microcontroller can be configured to have either 16 or 32general-purpose registers. Each register is 8 bits wide. The registers areimplemented using a dual-port distributed memory. The LatticeMico8 opcodeset permits the microcontroller to access 32 registers. When LatticeMico8 isconfigured with 16 registers, any opcode reference to R16 to R31 maps to R0to R15 respectively.General-purpose registers R13, R14, and R15 can also be used by theLatticeMico8 microcontroller as page-pointer registers, depending on thecurrent memory mode. Page pointers (PP) are used when the scratchpad andperipheral memory spaces are larger than 256 bytes (see “Memory Modes”on page9). The memory address is formed by concatenating the values inregisters R13, R14, and R15 with an 8-bit value derived from the LatticeMico8memory instruction. Table1 on page4 highlights the three LatticeMico8memory modes and corresponding designation of registers R13, R14, andR15.In the large memory mode, registers R13, R14, and R15 indicate which ofthe 16M pages is currently active. R13 provides the least-significant byteof page address and R15 provides most-significant byte.A RCHITECTURE :Register ArchitectureIn the medium memory mode, register R13 indicates which of the 256pages is currently active.Control and Status RegistersTable 2 shows all the names of the control and status registers (CSR), theread and write access, and the index used when the register is accessed. Allsignal levels are active high.IP – Interrupt Pending The IP CSR contains a pending bit for each of the 8external interrupts. A pending bit is set when the corresponding interruptrequest line is asserted low. Bit 0 corresponds to interrupt 0. Bits in the IPCSR can be cleared by writing a 1 with the wcsr instruction. Writing a 0 has noeffect. After reset, the value of the IP CSR is 0.IM – Interrupt Mask The IM CSR contains an enable bit for each of the 8external interrupts. Bit 0 corresponds to interrupt 0. In order for an interrupt tobe raised, both an enable bit in this register and the IE flag in the IE CSR mustbe set to 1. After reset, the value of the IM CSR is 0.IE – Global Interrupt Enable The IE CSR contains a single-bit (bit position0) flag, IE, which determines whether interrupts are enabled. This flag haspriority over the IM CSR. After reset, the value of the IE CSR is 0.Table 1: Designation of LatticeMico8 Registers Based on LatticeMico8 Memory ModeRegister NumberLatticeMico8 Memory ModeSmall Medium Large 0 through 12general-purpose general-purpose general-purpose 13general-purpose PP PP (LSB)14general-purpose general-purpose PP 15general-purpose general-purpose PP (MSB)16 through 31general-purpose general-purpose general-purposeTable 2: Control and Status RegistersNameAccess Index Description IPR/W 0Interrupt Pending IMR/W 1Interrupt Mask IE R/W 2Global Interrupt Enable/DisableA RCHITECTURE:Memory ArchitectureMemory ArchitectureThis section describes the memory architecture of the LatticeMico8microcontroller.Memory RegionsThe LatticeMico8 microcontroller recognizes three independent memoryregions. Each memory region has its own independent input/output interfaceand its own instruction set support. These three memory regions are calledthe PROM, the Scratchpad, and the Peripheral memory regions respectively.The size and location of each of these memory regions is configurable as longas all these three memory regions are located entirely within the 4GB addressspace. These memory regions can also be configured to overlap withinLatticeMico System Builder. Figure2 shows the three memory regions andthe address space to which they are confined by LatticeMico System Builder.See “Acessing LatticeMico8 Memory Regions” on page42 for details on howto access each of the three memory regions from a software programmer'sperspective.Figure 2: Memory OrganizationA RCHITECTURE:Memory ArchitecturePROM SpaceThe PROM memory region contains the program code that will be executedby the LatticeMico8 microcontroller core and is accessible via its instructionfetch engine. The size of the PROM memory region can be configured toaccommodate 256, 512, 1024, 2048, or 4096 instruction opcodes. By defaultthe memory region is located within the LatticeMico8 microcontroller. Thememory regions can also be configured to be external to the LatticeMico8microcontroller.When the PROM memory region is internal to the microcontroller, it isconnected to the LatticeMico8 instruction fetch engine via a dedicated high-speed bus that fetches one instruction opcode per clock cycle. There is noinstruction set support to write to internal PROM. When the PROM memoryregion is external to the microcontroller, it is accessed by the masterWISHBONE interface within the LatticeMico8 instruction fetch engine. ThisWISHBONE interface has a 8-bit data bus and it takes three 8-bit WISHBONEaccesses to fetch one LatticeMico8 instruction opcode. The instruction fetchlatency is now dictated by the system WISHBONE latency and the latency ofthe PROM memory. The minimum instruction fetch latency is 12 clock cycles.Table3 shows the WISHBONE interface signals. For more information aboutthe WISHBONE System-On-Chip (SoC) Interconnection Architecture forPortable IP Cores, as it is formally known, refer to the Web site at /projects.cgi/web/wishbone.Table 3: PROM WISHBONE Interface SignalsName Width Direction DescriptionI_CYC_O1Output A new LatticeMico8 instruction fetch request is initiated by asserting thissignal. This signal remains asserted until I_ACK_I is asserted, whichindicates the completion of the request.I_STB_O1Output A new LatticeMico8 instruction fetch request is initiated by asserting thissignal. This signal may be valid only for the first cycle.I_CTI_O2Output Always has a value 2’b00I_BTE_O3Output Always has a value 3’b000I_ADR_O32Output The address output array I_ADR_O( ) is used to pass a binary address.I_WE_O1Output Always has a value 1’b0I_SEL_O4Output Always has a value 4’b1111I_DAT_O8Output UnusedI_LOCK_O1Output Unused (signal exists, but it is not implemented)I_ACK_I1Input When asserted, the signal indicates the normal termination of a bus cycleand that an instruction is available on I_DAT_I bus.I_ERR_I1Input Unused (signal exists, but it is not implemented)I_RTY_I1Input Unused (signal exists, but it is not implemented)I_DAT_I8Input One byte of the LatticeMico8 18-bit instruction opcode is available on thisbus when I_ACK_I is asserted. It takes three WISHBONE transactions tocomplete one LatticeMico8 instruction fetch.A RCHITECTURE :Memory ArchitectureThe advantage of configuring the PROM memory region as external to the LatticeMico8 microcontroller is that the PROM memory region can now be configured to overlap with other LatticeMico8 memory regions within Lattice Mico System Builder and, therefore, be directly written to by LatticeMico8 opcodes. This configuration also offers the ability to store and executeLatticeMico8 instructions from non-volatile memory such as Flash. As shown in Figure 2 on page 5, the external PROM memory region can be placed at any location within a 4GB address range. When the LatticeMico8microcontroller is instantiated using Lattice Mico System Builder, it will restrict the placement of external PROM between 0x00000000 and 0x80000000.Scratchpad SpaceLatticeMico8 provides an independent memory space that is designed to be used for program read/write and read-only data as well as other user-defined data. The size of this scratchpad memory can be configured from 32 bytes to 4G bytes, in power-of-two increments. Figure 3 shows the structure of this scratchpad space and how data is located within this space. The scratchpad memory space can be placed at any location within a 4GB address range. The first 4 bytes are reserved for LatticeMico8 interrupt handling. Program data is situated above this reserved space. The designer can configure the size of scratchpad memory that is used for program data. User-defined data is optional and is always located after program data.The scratchpad memory can be configured to be entirely internal to theLatticeMico8 microcontroller, entirely external to LatticeMico8 microcontroller, or a combination of both.◆The internal scratchpad is implemented using single-port EBRs and is hooked up to the LatticeMico8 core through a dedicated bus. Reads or writes to the internal scratchpad take a single clock cycle.◆The external scratchpad is accessed through the Peripheral WISHONE interface of the LatticeMico8 microcontroller (see “Interrupt Architecture” on page 10). Each read or write will take a minimum of 2 clock cycles.Figure 3: Scratchpad Space StructureA RCHITECTURE:Memory ArchitecturePeripheral (Input/Output) SpaceLatticeMico8 provides an independent memory space that is designed to beused for peripherals and other memory-mapped hardware. The size of thisperipheral memory space can be configured from 0 bytes to 4G bytes inpower-of-two increments. While the peripheral memory space can be placedat any location within a 4GB address range, Lattice Mico System Builderrestricts the peripheral memory space to the addresses between 0x80000000and 0xFFFFFFFF.This memory space is always external to the LatticeMico8 microcontroller andis primarily used to enable LatticeMico8 to communicate with memory-mapped hardware and peripherals. The LatticeMico8 microcontroller cancommunicate with any hardware or peripheral within the peripheral memoryspace, through the peripheral WISHBONE interface within LatticeMico8 core,using LatticeMico8 instruction opcodes. This WISHBONE interface has 8-bitinput and output data busses and a 32-bit address bus. Table4 shows thePeripheral WISHBONE interface signals.Table 4: Peripheral WISHBONE Interface SignalsName Width Direction DescriptionD_CYC_O1Output A new LatticeMico8 data request is initiated by asserting this signal.This signal remains asserted until D_ACK_I is asserted, whichindicates completion of the request.D_STB_O1Output A new LatticeMico8 data request is initiated by asserting this signal.This signal may be valid only for first cycle.D_CTI_O2Output This bus will always have a value 2'b00D_BTE_O3Output This bus will always have a value 3'b000D_ADR_O32Output The address output array D_ADR_O( ) is used to pass a binaryaddress. D_ADR_O( ) actually has a full 32 bits.D_WE_O1Output This signal indicates whether a new data request is a read (0) or awrite (1). This signal must hold its value as long as D_CYC_O isasserted.D_SEL_O1Output Always has a value 1'b1D_DAT_O8Output Has valid data when D_WE_O is 1'b1.D_LOCK_O1Output Unused (signal exists, but it is not implemented)D_ACK_I1Input When asserted, the signal indicates the normal termination of a buscycle.D_ERR_I1Input Unused (signal exists, but it is not implemented)D_RTY_I1Input Unused (signal exists, but it is not implemented)D_DAT_I8Input Data is available on this bus when D_ACK_I and D_WEO areasserted.A RCHITECTURE:Memory ArchitectureMemory ModesThe LatticeMico8 microcontroller can be configured for different sizes for thescratchpad and peripheral memory regions. The size of scratchpad andperipheral memory regions can be as small as 32 bytes and as large as 4Gbytes. A 32-byte memory region requires only 5 address bits, while a 4GBmemory region requires 32 address bits.The LatticeMico8 instruction set can directly access only 256 memorylocations, since all general-purpose registers are 8 bits wide. (See “InstructionSet” on page13.) To access memory regions that are larger than 256 bytes,LatticeMico8 relies on a concept called “paging,” in which the memory islogically divided into 256-byte pages. The memory address is composed oftwo parts, as shown in Figure4: the page index and the page pointer. Thepage index is 8 bits wide and addresses a byte in the currently active page,while the page pointer provides the address of the currently active page. Figure 4: Memory ModesThe page pointers are essentially general-purpose registers that have beenretargeted to provide a memory address. (See “Memory Regions” on page5.)Table5 shows the memory modes of the LatticeMico8 microcontroller, thesize of addressable memory space in each mode, and the general-purposeregisters used as page pointers.Table 5: LatticeMico8 Memory ModesMemory Mode Maximum Memory Size Address Bits Page Pointer RegistersSmall256 bytes8N/AMedium16K bytes16R13Large4G bytes32R13, R14, R15A RCHITECTURE:Interrupt ArchitectureInterrupt ArchitectureThe LatticeMico8 microcontroller supports up to 8 maskable, active-low, level-sensitive interrupts. Each interrupt line has a corresponding mask bit in the IMCSR. The mask enable is active high. A global interrupt-enable flag isimplemented in the IE CSR. The software can query the status of theinterrupts and acknowledge them through the IP CSR. If more interruptsources or more sophisticated interrupt detection methods are required,external interrupt controllers can be cascaded onto the microcontroller’sinterrupt pins to provide the needed functionality.When an interrupt is received, the address of the next instruction is pushedinto the call stack (see “Call Stack” on page10), and the microcontrollercontinues execution from the interrupt vector (address 0). The flags (carry andzero) are pushed onto the call stack along with the return address. An iretinstruction will pop the call stack and transfer control to the address on top ofthe stack. The flags (carry and zero) are also popped from the call stack.See “Interrupt Convention” on page41 for details on the programming modelfor interrupts.NoteThe LatticeMico8 microcontroller does not support nested interrupts. Locations 0through 3 in the scratchpad are reserved for interrupt handling and should not used forany other purpose.Call StackThe LatticeMico8 microcontroller implements a hardware call stack to handleprocedure calls (call instruction) and procedure/interrupt return (ret and iretinstructions). The depth of this call stack determines the number of nestedprocedure calls that can be handled by the LatticeMico8 microcontroller, anddesigners can choose the depth to be 8, 16, or 32. When a call instruction isexecuted, the address of the next instruction is pushed on to the call stack. Aret or iret instruction will pop the stack and continue execution from thelocation at the top of the stack.NoteThere is no mechanism in hardware to detect whether the number of nested procedurecalls has exceeded the depth of the call stack. It is up to the software developer toensure that the call stack does not overflow.Chapter 3Configuration OptionsThe LatticeMico8 microcontroller is reconfigurable. Table6 outlines thevarious configuration options that are available to a designer.Table 6: LatticeMico8 Configuration OptionsParameter Name DescriptionLATTICE_FAMILY The target Lattice FPGA family.CFG_PROM_INIT_FILE Provides the file that contains the initialization data (program code) for aninternal PROM.CFG_PROM_INIT_FILE_FORMAT Indicates whether CFG_PROM_INIT_FILE is in hex (default) or binary. CFG_PROM_SIZE Indicates the number of instructions that can be accommodated in thePROM.CFG_SP_INIT_FILE Provides the file that contains the initialization data (program data) for aninternal scratchpad.CFG_SP_INIT_FILE_FORMAT Indicates whether CFG_SP_INIT_FILE_FORMAT is hex (default) or binary. SP_PORT_ENABLE Indicates whether the scratchpad is internal (value 1) or external (value 0).The default is 1.SP_SIZE Indicates the number of bytes in the scratchpad.SP_BASE_ADDRESS Provides the base address of the scratchpad, regardless of whether it isinternal or external.CFG_IO_BASE_ADDRESS Provides the base address of the peripheral memory region.CFG_EXT_SIZE_[8|16|32]Indicates the size of address bus for the scratchpad and peripheral memoryregions and, therefore, identifies the LatticeMico8 memory mode. Thedefault is 16 (medium memory mode).CFG_REGISTER_[16|32]Indicates the number of general-purpose registers in LatticeMico8. Thedefault is 8.C ONFIGURATION O PTIONS:Table 6: LatticeMico8 Configuration Options (Continued)Parameter Name DescriptionCFG_CALL_STACK_[8|16|32]Indicates the depth of the call stack. The default is 16.CFG_ROM_EN Indicates whether the PROM and Scratchpad memories need to beinitialized from non-volatile storage such as flash at power-up. The defaultis 0, i.e., no copying is required.CFG_ROM_BASE_ADDRESS Provides the base address of the memory which contains the PROM andScratchpad images. The PROM image starts at this base address. TheScratchpad image starts at location (CFG_PROM_SIZE*3).CFG_XIP Indicates whether the PROM memory is the same as the non-volatilestorage that contains the PROM image. The default is 0, i.e., bothmemories are different. 1 indicates that both memories are the same (i.e.,no copying needs to be done) and the PROM is external to LatticeMico8. INTERRUPTS Indicates the number of external interrupts. The default is 8.Chapter 4Instruction SetThis chapter includes descriptions of all the instruction opcodes of theLatticeMico8 microcontroller.Instruction FormatsAll LatticeMico8 instructions are 18 bits wide. They are in three basic formats,as shown in Figure5, Figure6, and Figure7.Figure 5: Register-Register FormatFigure 6: Register-Immediate FormatFigure 7: Immediate FormatI NSTRUCTION S ET:Instruction Set Lookup TableInstruction Set Lookup TableTable 7: Instruction Set Reference CardOperation Action Flags ADD Rd, Rb Rd = Rd + Rb Carry, Zero ADDC Rd, Rb Rd = Rd + Rb + Carry Carry, Zero ADDI Rd, C Rd = Rd + C Carry, Zero ADDIC Rd, C Rd = Rd + C + Carry Carry, Zero AND Rd, Rb Rd = Rd & Rb Zero ANDI Rd, C Rd = Rd & C ZeroB Label PC = PC + LabelBC Label If Carry = 1, PC = PC + LabelBNC Label If Carry = 0, PC = PC + LabelBNZ Label If Zero = 0, PC = PC + LabelBZ Label If Zero = 1, PC = PC + LabelCALL Label Stack = PC + 1, PC = PC + LabelCALLC Label If Carry = 1, Stack = PC + 1, PC = PC + LabelCALLNC Label If Carry = 0, Stack = PC + 1, PC = PC + LabelCALLNZ Label If Zero = 0, Stack = PC + 1, PC = PC + LabelCALLZ Label If Zero = 1, Stack = PC + 1, PC = PC + LabelCLRC Carry = 0Carry CLRI IE = 0CLRZ Zero = 0ZeroCMP Rd, Rb Rd – Rb Carry, Zero CMPI Rd, C Rd – C Carry, Zero EXPORT Rd, Port#Peripheral (Port #) = RdEXPORTI Rd, Rb Peripheral (Page Pointer, Rb) = RdIMPORT Rd, Port#Rd = Peripheral (Port #)IMPORTI Rd, Rb Rd = Peripheral (Page Pointer, Rb)IRET PC, Carry, Zero = Stack Carry, Zero LSP RD, SS Rd = Scratchpad (SS)LSPI Rd, Rb Rd = Scratchpad (Page Pointer, Rb)MOV Rd, Rb Rd = RbMOVI Rd, C Rd = ConstI NSTRUCTION S ET:Instruction Set Lookup TableTable 7: Instruction Set Reference Card (Continued)Operation Action FlagsNOP PC = PC + 1OR Rd, Rb Rd = Rd | Rb ZeroORI Rd, C Rd = Rd | C ZeroRCSR Rd, CRb Rd = CSR (Rb)RET PC = StackROL Rd, Rb Rd = {(Rb<<1), Rb[0]}ZeroROLC Rd, Rb Rd = {(Rb<<1), Carry}, Carry = Rb[7]Carry, ZeroROR Rd, Rb Rd = {Rb[0], (Rb>>1)}ZeroRORC Rd, Rb Rd = {Carry, (Rb>>1)}, Carry = Rb[0]Carry, ZeroSETC Carry = 1CarrySETI IE = 0SETZ Zero = 1ZeroSSP Rd, SS Scratchpad (SS) = RdSSPI Rd, Rb Scratchpad (Page Pointer, Rb) = RdSUB Rd, Rb Rd = Rd – Rb Carry, ZeroSUBC Rd, Rb Rd = Rd – Rb – Carry Carry, ZeroSUBI Rd, C Rd = Rd – C Carry, ZeroSUBIC Rd, C Rd = Rd – C – Carry Carry, ZeroTEST Rd, Rb Rd & Rb ZeroTESTI Rd, C Rd & C ZeroXOR Rd, Rb Rd = Rd ^ Rb ZeroXORI Rd, C Rd = Rd ^ C ZeroWCSR CRd, Rb CSR (Rd) = Rb ZeroI NSTRUCTION S ET:Instruction DescriptionsInstruction DescriptionsThis section describes the operations of the instruction set.ADD Rd, Rb17161514131211109876543210 00100Rd Rd Rd Rd Rd Rb Rb Rb Rb Rb000CY Flag Updated Zero Flag UpdatedYes YesRd = Rd + Rb (add registers)The carry flag is updated with the carry out from the addition. The zero flag isset to 1 if all the bits of the result are 0.ADDC Rd, Rb17161514131211109876543210 00110Rd Rd Rd Rd Rd Rb Rb Rb Rb Rb000CY Flag Updated Zero Flag UpdatedYes YesRd = Rd + Rb + Carry Flag (add registers and carry flag)The carry flag is updated with the carry out from the addition. The zero flag isset to 1 if all the bits of the result are 0.I NSTRUCTION S ET:Instruction DescriptionsADDI Rd, C17161514131211109876543210 00101Rd Rd Rd Rd Rd C C C C C C C CCY Flag Updated Zero Flag UpdatedYes YesRd = Rd + CCCCCCCC (add constant to register)The carry flag is updated with the carry out from the addition. The zero flag isset to 1 if all the bits of the result are 0.ADDIC Rd, C17161514131211109876543210 00111Rd Rd Rd Rd Rd C C C C C C C CCY Flag Updated Zero Flag UpdatedYes YesRd = Rd + CCCCCCCC + Carry Flag (add register, constant and carry flag)The carry flag is updated with the carry out from the addition. The zero flag isset to 1 if all the bits of the result are 0.AND Rd, Rb17161514131211109876543210 01010Rd Rd Rd Rd Rd Rb Rb Rb Rb Rb000CY Flag Updated Zero Flag UpdatedNo YesRd = Rd and Rb (bitwise AND registers)The zero flag is set to 1 if all the bits of the result are 0.。
ASIC实验报告(8位CPU的设计)

ASIC设计实验报告学院:电子工程学院学号:2014*******姓名:***指导老师:***2014年11月13日一、实验目的:通过对ASIC实验课的学习,应当学会以下几点:1.熟悉Linux操作系统的应用环境,基本命令行的应用,以及对vi编辑器熟练应用。
2.熟练掌握Verilog编程语言,包括基本组合逻辑电路的实现方法,基本时序逻辑电路的实现方法,怎样使用预定义的库文件,利用always块实现组合逻辑电路的方法已经着重了解assign与always 两种组合逻辑电路实现方法之间的区别,深入了解阻塞赋值与非阻塞赋值的概念以及应用的差别,有限状态机(FSM)实现复杂时序逻辑的方法,以及学会在Linux 系统环境当中应用Synopsys工具VCS进行仿真。
3.熟悉电路设计当中的层次化、结构化的设计方法。
4.熟悉CPU当中有哪些模块组成,模块之间的关系,以及其基本的工作原理。
5.学会利用汇编语言设计程序,注意代码规范性要求。
二、实验要求:按照实验指导书上的要求即:CPU各个模块的Verilog语言代码的编写、编译及仿真正确,并在规定的时间内完成。
要求对CPU进行语言级系统仿真结果正确之后,利用该实验当中采用的八个汇编关键字,编写一个能够实现某种功能的小程序。
然后对其中的控制器电路进行综合,并检查Timing 和Power,进行门级仿真。
三、实验内容:设计一个8位RISC_CPU 系统。
(RISC: Reduced Instruction Set Computer),它是一种八十年代才出现的CPU,与一般的CPU相比,不仅只是简化了指令系统,而且通过简化指令系统使计算机的结构更加简单合理,从而提高了运算速度。
从实现的方法上,它的时序控制信号部件使用了硬布线逻辑,而不是采用微程序控制方式,故产生控制序列的速度要快的多,因为省去了读取微指令的时间。
此CPU所具有的功能有:(1)取指令:当程序已在存储器中时,首先根据程序入口地址取出一条程序,为此要发出指令地址及控制信号。
微处理器接口芯片设计实例
是不锁存的。
由于读进程程序比较简单,因此这里不再用流程图说明。
要注意的是,该读进程还描述了最终送数据总线D0~D7的
数据是通过三态缓冲器来实现的。
微处理器接口芯片设计实例
12.1.5 8255芯片VHDL
前面详细解释了8255芯片的VHDL描述程序的各组成部
分。为了证明该程序模块的正确性,我们用MAX+pulsⅡ的
8255的“0”型工作方式,即基本的输入/输出方式。
微处理器接口芯片设计实例
12.1.1 8255的引脚与内部结构
1.外部引脚
8255的引脚如图12-1所示。它共有40条引脚,其中:
D0~D7——双向数据总线,用来传送数据和控制字。
RD——读信号线,与其他信号线一起实现对8255接口
的读操作。
WR——写信号线,与其他信号线一起实现对8255接口
组包括B口的8条线PB0~PB7和C口的低4位PC0~PC3。A组
和B组都分别由软件编程来加以控制。
微处理器接口芯片设计实例
图12-2 8255的内部结构框图
微处理器接口芯片设计实例
12.1.2 8255的工作方式及其控制字
8255有3种工作方式:方式0、方式1和方式2。前面已经
提到,为简化设计这里只设定为方式0。
微处理器接口芯片设计实例
2.内部结构
8255的内部结构框图如图12-2所示。
从图12-2中可以看到,左边的信号与CPU总线相连,而
右边的信号则与外设相连。A、B、C口的输出均有锁存能
力,而输入都没有锁存能力(这一点与原8255芯片略有区别)。
为了控制方便,将8255的3个口分成A、B两组。其中,
A组包括A口的8条线PA0~PA7和C口的高4位PC4~PC7;B
简易CPU模型设计verilog
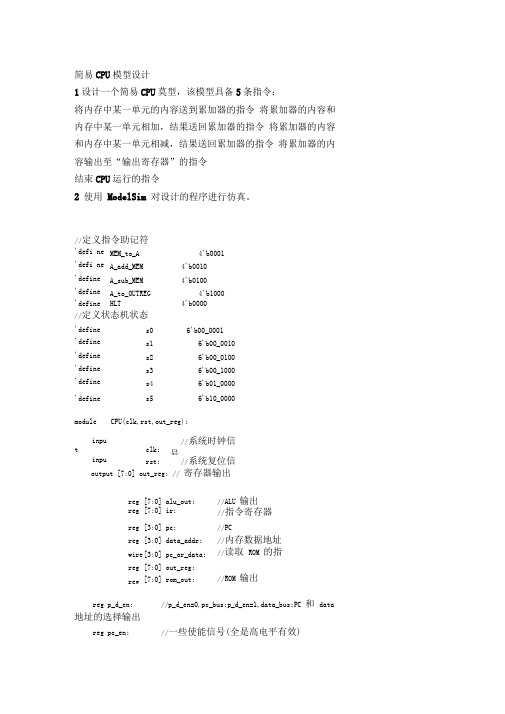
简易CPU 模型设计1设计一个简易CPU 莫型,该模型具备5条指令:将内存中某一单元的内容送到累加器的指令 将累加器的内容和内存中某一单元相加,结果送回累加器的指令 将累加器的内容和内存中某一单元相减,结果送回累加器的指令 将累加器的内容输出至“输出寄存器”的指令结束CPU 运行的指令2 使用 ModelSim 对设计的程序进行仿真。
//定义指令助记符'defi ne MEM_to_A 4'b0001'defi ne A_add_MEM 4'b0010'define A_sub_MEM 4'b0100'define A_to_OUTREG 4'b1000'define HLT 4'b0000//定义状态机状态'define s0 6'b00_0001'define s1 6'b00_0010'define s2 6'b00_0100'define s3 6'b00_1000'define s4 6'b01_0000'define s5 6'b10_0000module CPU(clk,rst,out_reg);inpu t clk;//系统时钟信号 inpu t rst; //系统复位信output [7:0] out_reg; // 寄存器输出reg [7:0] alu_out; //ALU 输出reg [7:0] ir; //指令寄存器reg [3:0] pc; //PCreg [3:0] data_addr; //内存数据地址wire [3:0] pc_or_data; //读取 ROM 的指针reg reg [7:0] out_reg; [7:0] rom_out; //ROM 输出reg p_d_en; //p_d_en=0,pc_bus;p_d_en=1,data_bus;PC 和 data地址的选择输出reg pc_en; //一些使能信号(全是高电平有效)reg ir_en;reg alu_en;reg data_en;reg out_en;reg load_a; //加载累加器的使能信号reg [7:0] a; //累加器reg [5:0] state; //状态机状态寄存器//判断是PC 地址有效还是数据地址有效(用于选择ROM 中的程序和数据)assign pc_or_data = (rst) ? ( p_d_en ? data_addr : pc) : 4'b0;//取数据地址,用于ALU 计算always @ (posedge clk or begin if(rst == 1'b0)data_addr <= 4'b0;else if(data_en == 1'b1) data_addr <= ir[3:0]; end//PC 加一,用于取下一条指令always @ (posedge clk or begin if(rst == 1'b0)pc <= 3'b0;else if(pc_en == 1'b1)pc <= pc + 3'b001;end//取指令always @ (posedge clk or begin if(rst == 1'b0)ir <= 8'b0;else if(ir_en == 1'b1) ir <= rom_out; end//寄存器输出always @ (posedge clk or beginif(rst == 1'b0) out_reg <=8'b0;else if(out_en == 1'b1)out_reg <= alu_out; end//ALU 数据处理结果输出到累加器always @ (posedge clk or negedge rst) negedge rst) negedge rst) negedge rst) negedge rst)beginif(rst ==1'b0)a <= 8'b0;else if(load_a == 1'b1) a<= alu_out;end//ALU 根据指令进行运算always @ (*)beginif(rst == 1'b0)alu_out = 8'b0;else if(alu_en == 1'b1) begincase(ir[7:4])'MEM_to_A: alu_out rom_out;'A_add_MEM: alu_ o ut = a +rom_out;'A_sub_MEM: alu_ out = a -rom_out;'A_to_OUTREG: alu_out a;'HLT: alu_ o ut = alu_out;default: alu_out 8'bO;endcase end end//状态机,用于控制整个程序的控制,是核心控制模块always @ (posedge clk or negedge rst)beginif(rst == 1'bO) //复位时全停beginpc_en <= 1'bO;ir_en <= 1'bO;alu_en <= 1'bO;data_en <= 1'bO;p_d_en <= 1'bO; //p_d_en=O,pc_bus;p_d_en=1,data_bus;out_en <= 1'b0;load_a <= 1'b0;state <= 'sO;endelsebegincase(state)//取指令'sO:beginpc_en <= 1'bO; ir_en <= 1'b1;alu_en <= 1'bO; data_en <= 1'b0; p_d_en <= 1'b0;out_en <= 1'b0; load_a <= 1'b0;state <= 'si;end//PC 加一's1:beginpc_en <= 1'b1;ir_en <= 1'b0;alu_en <= 1'b0;data_en <= 1'b0;p_d_en <= 1'b0; out_en <= 1'b0; load_a <= 1'b0;state <= 's2;end //取内存中的数据,同时判断是不是停止CPU 的工作's2:begin pc_en <= 1'b0; ir_en <= 1'b0; alu_en <= 1'b0;data_en <= 1'b1; p_d_en <= 1'b1;out_en <= 1'b0; load_a <= 1'b0; if(ir[7:4] =='HLT) beginstate <= 's5; end else beginstate <= 's3; end end//ALU 处理数据's3:begin pc_en <= 1'b0; ir_en <= 1'b0; alu_en <= 1'b1;data_en <= 1'b0; p_d_en <= 1'b1; out_en <= 1'b0;load_a <= 1'b0;state <= 's4;end //ALU 的结果输出到累加器,//并且如果'A_to_OUTREG 有效,则同时把累加器输出到寄存器's4:begin pc_en <= 1'b0; ir_en <= 1'b0; alu_en <= 1'b0;data_en <= 1'b0; p_d_en <= 1'b1;load_a <= 1'b1; state <= 's0;if(ir[7:4] == 'A_to_OUTREG) begin out_en <= 1'b1;end else begin out_en <= 1'b0;endend//通过状态锁存和使能信号清零来实现停止CPU 工作's5:begin pc_en <= 1'b0; ir_en <= 1'b0; alu_en <= 1'b0;data_en <= 1'b0; p_d_en <= 1'b0;out_en <= 1'b0; load_a <= 1'b0;state <= 's5;endendcase endend//ROM, 存储数据和指令,输入地址可以直接得到相应的内存输出always @ (*)begincase(pc_or_data)// 指令(共 8 位:高四位为指令,低四位为数据地址) // 内存 to 累加器4'b0000:rom_out = 8'b0001_1100;//加4'b0001: rom_out = 8'b0010_1101;//累加器输出到寄存器4'b0010:rom_out = 8'b1000_1101; // 内存 to 累加器 4'b0011:rom_out = 8'b0001_1110; //减4'b0100: rom_out = 8'b0100_1111;//累加器输出到寄存器4'b0101:rom_out = 8'b1000_1111; // 停止 CPU 工作4'b0110: rom_out = 8'b0000_1100; // 无用指令, 不会执行4'b0111:rom_out = 8'b0000_1100; 4'b1000:rom_out = 8'b0000_1100; 4'b1001:rom_out = 8'b0000_1100; 4'b1010:rom_out = 8'b0000_1100; 4'b1011:rom_out = 8'b0000_1100; //数据4'b1100:rom_out = 8'b0111_1010; 4'b1101:rom_out = 8'b1000_0101; 4'b1110:rom_out = 8'b0111_1111; 4'b1111:rom_out = 8'b0000_1111; end endmodule default: endcase rom_out = 8'b0001_1100;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Cache的组织
Cachestate:4种状态,单处理器只使用两种 • • • • Invalid(00) Share(01) Clean Exclusive(10) Dirty Exclusive(11) ※ ※
32bit物理地址的划分
• Tag(20位):比较是否命中 • Index(7位):查找哪一个Cacheline • Offset(5位):定位Cacheline中哪一个字节
修改发射策略
• 访存等待
– 一旦遇到访存指令,必须等访存指令结果返回 后,下一条指令才能发射出去
• 优点:顺序发射,顺序结束,例外处理比 较简单方便 • 缺点:指令间没有相关也必须等待!
乱序执行时的精确例外处理
• 两种方式:
– 乱序发射,顺序结束(龙芯-1采用的方式)
• 指令执行完后,等待,直到允许写回才能写入到寄 存器中
• 三种地址错情况(取指、访存读、访存写) • 取指
– 例外作为取指的结果送回,并当作一条特殊指令 对待,直到送入控制寄存器模块,发生例外 – 取指模块判断地址错后,停止取指
• 访存读、写
– 在ALU模块中直接判断是否发生访存地址错例外, 如果发生,直接进入控制寄存器模块,而不进入 Cache模块 – 同时清除在发射模块中标志访存操作的标志位
MIPS指令格式介绍
1、R类型指令(寄存器) OP rs rt rd shamt funct 2、I类型指令(立即数) OP rs rt Imm 3、J类型指令(跳转) OP target
所支持的指令
• 算术逻辑类指令
– ADD、ADDI、SUB、AND、OR、NOR、SLL、 SRL、SRA
• 访存类指令
PC的来源
停止取指的情况
• 发射堵塞(Issue_stall)
– 出现指令有相关情况
• 特殊指令(Special Instruction)
– 有些情况需要停止取指,如Cache0、跳转指令 (无转移预测)、出现取指地址错例外等等
• 如何处理
– 设置PC的有效位,一旦停止取指,有效位置无效
跳转指令的延迟槽(Delay Slot)
– 顺序发射,乱序结束(本实例采用的方式)
• 分析乱序结束出现的情况
–一条访存指令运行结束前,之后数条ALU指令 已经执行完毕
解决方式
• ALU指令出现例外
–停止取指,停止发射,停止写回,直到访存结 果返回之后,进入例外处理程序
• 访存指令出现例外
–例外种类,地址错例外 –处理方式,判断地址错例外的时机,一拍完成
MIPSI指令集32位CPU 设计实例
赵继业
处理器特性介绍
• 全32位操作,32个32位通用寄存器,所有 指令和地址全为32位 • 静态流水线(3~5级) • Forwarding技术 • 片内L1 Cache,指令、数据各4KByte,硬 件初始化 • 没有TLB,但系统控制协处理器(CP0)具 有除页面映射外的基本功能
译码模块(Decode)
• 由MIPS指令转化为CPU内部操作码 • 内部操作码的定义
– 应当分组(ALU、MEM、Branch)
• 分组示例
– ALU:ADD -> 00001、SUB -> 00011 – MEM:LW -> 10000、 SW -> 10001 – Branch: J -> 11000、BEQ -> 11010
发射模块(Issue)
• 静态流水线
– 遇到相关情况就停止发射,直到相关解决
• 相关情况分析
– ALU和跳转指令一拍完成,即使出现这些指令 间的相关也没有问题 – MFC0、MTC0、CACHE0和CACHE1指令也 可以是一拍完成 – 访存指令中的LW、SW指令执行时间不确定, 其后指令有相关必须停止发射
• 延迟槽的意义
– MIPS指令系统的规定,由编译器自动处理
• 处理跳转指令的方法
– 遇见跳转指令就停止取指,直到获得目标地址 (流水线的要求) – 采用分支预测 – J指令的处理,在ALU模块中计算转移地址
• 原则:必须保证处在延迟槽的指令被运行!
指令Cache对取指模块的影响
• RAM的同步、异步问题
• 效率较高,在“龙芯-1”中使用Forwarding 技术前后性能差距超过10%
Forwarding图解
ADD R3,R5,R2 SUB R4,R1,R3
发射判断 执行&写回
R3 可用 R4 可用
发射判断 执行&写回
发射判断 执行&写回
算术及逻辑模块(ALU)
• • • • • 是一个运算单元 根据发射来的指令码判断所应当做的操作 不同指令的结果存储寄存器不同(Rd或Rt) 判断指令执行所导致的例外(溢出、自陷) 主要目标:尽量节省硬件开销
取指&译码 发射 执行&写回
取指&译码
发射
访存
写回
MIPS存储系统体系和管理 • 操作方式:用户态、核心态
功能模块结构
取指模块(Fetch)
• PC-> 指令Cache -> 指令-> 译码 • PC的来源:PC+4(通常)、跳转指令(目标地址)、
例外处理(例外处理向量入口地址、EPC内容)
• 停止取指的情况(发射堵塞、特殊指令) • 跳转指令的Delay Slot(延迟槽) • 指令Cache的实现问题(同步与异步RAM)
块操作(Block)
• 在CPU使用Cache时,所有的Cache访存操 作都是块操作,一次一个Cacheline • 与单字操作相比,块操作提高了效率 • CPU直接访存,不使用Cache时,采用单 字操作 • 本实例中使用Cache硬件初始化,都是块操 作,如果是操作系统软件初始化,就必须 存在单字操作发射、写回 • 将当前指令的内容和PC值放入控制寄存器 模块中储存起来 • 待前面指令内容返回之后,发出例外信号, 转入例外处理程序的入口地址 • 发出例外信号的同时,判断EPC中应存放 的例外地址并置入
Cache模块
• • • • • • • 指令Cache和数据Cache独立 直接映射 写回机制 虚地址低位查找(Index、Offset) 物理地址高位比较 各4KByte大小 Cache Line是32Byte(256bit)
• 优缺点
–优点:不出现前后指令相关则无需等待 –缺点:例外处理比较复杂
Forwarding技术
• 什么是Forwarding?
– 发射时必须判断寄存器内容是否可用 – 运算指令即便一拍完成,该指令结果也必须在 下一拍对发射可用 – 实现对运算结果的侦听,一旦结果总线上结果 可用就直接取值用于发射
– LW、SW、MTC0、MFC0、CACHE(0、1)
• 跳转类指令
– J、JR、BEQ、BGTZ、GLEZ
• 其他指令
– ERET、TEQ
流水线结构
单条指令运行步骤 • Fetch & Decode(取指并译码) • Issue(发射) • Execute & Writeback(执行并写回)
• 停止发射也必须同时停止取指
发射模块中必须考虑的问题
• 两个功能部件(ALU和数据Cache) • 区别:执行指令的周期数不同 • 结果:指令的结束顺序被打乱(前面访存 指令的结果尚未返回,后面与之不相关的 ALU指令已经完成) • 必须考虑:一旦指令(包括ALU指令和访存 指令)运行中出现例外,如何处理?
北桥接口信号说明
• • • • oe:CPU输出使能,1bit ie:北桥输入使能,1bit iee:CPU允许北桥输入使能,1bit Sys_con:系统双向传递总线,65bit
– Sys_con[64]:1->CPU写操作,2->CPU读操作 – Sys_con[63:32]:32bit地址信号 – Sys_con[31:0]:32bit数据信号
实验说明(2)
• 设计CPU内部电路所使用的Verilog代码必 须均为可综合方式 • 所有时序器件必须使用同步逻辑(时钟上 跳沿触发),不能使用异步逻辑(电平触 发) • 提供Cache模块中SRAM的仿真用Verilog文 件,不能自行用寄存器搭建
实验说明(3)
• 在完成CPU设计之后,将对其进行进一步 的综合(Synthesis),生成网表(netlist) 文件 • 对网表文件进行零延迟仿真和时序反标仿 真(back annotation) • 观察综合及三次仿真(包括行为级仿真) 结果,完成实验最终报告
控制寄存器模块(Control Register)
• 主要进行例外处理 • 所能够处理的例外
– 复位、地址错(取指、访存读、访存写)、溢 出、自陷、保留指令、中断
• 所实现的例外处理寄存器
– 计数(Count)、比较(Compare)、状态 (Status)、原因(Cause)、例外地址 (EPC)、版本标识(Prid)
– 同步写入,读出的同步、异步问题
• 指令Cache必须保证一拍结果返回
– 采用异步读RAM的处理方式(正常方式)
• 解决方法
– 提前将PC的内容放入RAM中 – 相应的考虑
• 指令Cache的比较对象(必须一致) • 设置PC备份寄存器 • 设置pc_in_en,决定PC是否可以进入寄存器 • pc_valid的考虑(实际上提前一拍)
接口模块
• 连接CPU与外部设备(北桥、内存、外设 等) • 允许CPU访问Cache未命中所需的外部资 源,同时也允许外设访问CPU内部资源 • 信号转换(Reset、Interrupt)和信息交换 (访存请求、访存结果) • CPU内外频率配合(内频=外频×倍频)
接口模块设计要求
• 与北桥连接为双向三态总线(0、1、Z) • 能够提供内外频率转换 • 将Cache发出的块操作转化为八个地址请求, 并连续发出 • 将北桥返回的访存结果拼成一个Cacheline (256bit),送至Cache模块 • 外部信号(Reset、Interrupt)锁存后,送 往CPU内部