数字PID控制器设计
PID数字控制器的结构算法及参数设定

PID数字控制器的结构算法及参数设定
一、PID数字控制器的基本结构及算法
1.PID数字控制器的基本结构
PID控制PID控制兼有比例、积分和微分三种基本控制规律的优点,可使系统的稳态和动态性能以及系统的稳定性都得到改善,因而应用最为广泛。
其控制规律如下:
2.PID数字控制器的程序算法
3.PID控制规律的脉冲传递函数形式
二、PID数字控制器的参数设定
常用参数确定方法:
1.用逐步逼近法确定PID参数
1)首先只整定比例部分。
2)如果在比例控制的情况下静差达不到设计要求,则需加进积分环节。
3)若使用PI调节器控制消除了静差,而动态性能反复调整仍不能满意,则可加入微分环节,构成PID控制。
2.简易工程法确定PID参数
1)扩充临界比例度法
2)扩充响应曲线法
三、采样周期的选择
1.系统给定值变化频率较高时,采样频率也应取得较高,以使给定值的变化得到迅速响应。
2.如果被控对象是缓慢变化的热工或化工过程时,采样周期可以取得大些,当被控对象是快速系统时,采样周期可以取得较小。
3.当执行机构惯性较大时,采样周期可取得大些。
4.系统中控制回路数较多时,考虑到控制程序的执行时间,应取较大的采样周期。
基于单片机的pid温度控制系统设计
一、概述单片机PID温度控制系统是一种利用单片机对温度进行控制的智能系统。
在工业和日常生活中,温度控制是非常重要的,可以用来控制加热、冷却等过程。
PID控制器是一种利用比例、积分、微分三个调节参数来控制系统的控制器,它具有稳定性好、调节快等优点。
本文将介绍基于单片机的PID温度控制系统设计的相关原理、硬件设计、软件设计等内容。
二、基本原理1. PID控制器原理PID控制器是一种以比例、积分、微分三个控制参数为基础的控制系统。
比例项负责根据误差大小来控制输出;积分项用来修正系统长期稳态误差;微分项主要用来抑制系统的瞬时波动。
PID控制器将这三个项进行线性组合,通过调节比例、积分、微分这三个参数来实现对系统的控制。
2. 温度传感器原理温度传感器是将温度变化转化为电信号输出的器件。
常见的温度传感器有热电偶、热敏电阻、半导体温度传感器等。
在温度控制系统中,温度传感器负责将环境温度转化为电信号,以便控制系统进行监测和调节。
三、硬件设计1. 单片机选择单片机是整个温度控制系统的核心部件。
在设计单片机PID温度控制系统时,需要选择合适的单片机。
常见的单片机有STC89C52、AT89S52等,选型时需要考虑单片机的性能、价格、外设接口等因素。
2. 温度传感器接口设计温度传感器与单片机之间需要进行接口设计。
常见的温度传感器接口有模拟接口和数字接口两种。
模拟接口需要通过模数转换器将模拟信号转化为数字信号,而数字接口则可以直接将数字信号输入到单片机中。
3. 输出控制接口设计温度控制系统通常需要通过继电器、半导体元件等控制输出。
在硬件设计中,需要考虑输出接口的类型、电流、电压等参数,以及单片机与输出接口的连接方式。
四、软件设计1. PID算法实现在单片机中,需要通过程序实现PID控制算法。
常见的PID算法包括位置式PID和增量式PID。
在设计时需要考虑控制周期、控制精度等因素。
2. 温度采集和显示单片机需要通过程序对温度传感器进行数据采集,然后进行数据处理和显示。
《计算机控制技术》数字PID控制器设计与仿真实验报告
《计算机控制技术》数字PID控制器设计与仿真实验报告课程名称:计算机控制技术实验实验类型:设计型实验项目名称:数字PID控制器设计与仿真一、实验目的和要求1. 学习并掌握数字PID以及积分分离PID控制算法的设计原理及应用。
2. 学习并掌握数字PID控制算法参数整定方法。
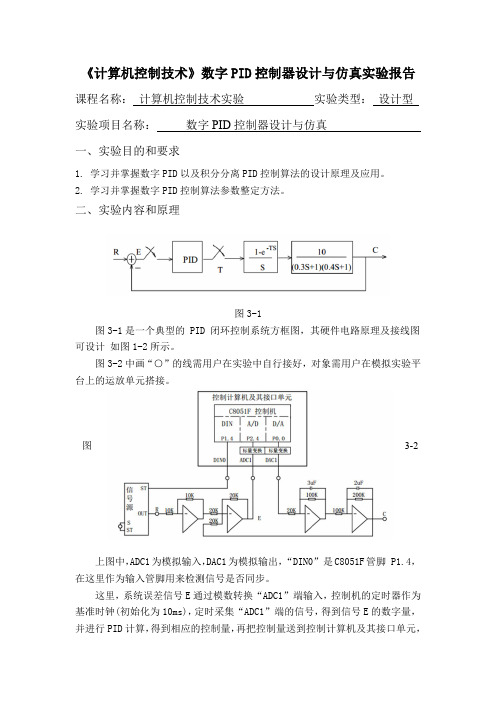
二、实验内容和原理图3-1图3-1是一个典型的 PID 闭环控制系统方框图,其硬件电路原理及接线图可设计如图1-2所示。
图3-2中画“○”的线需用户在实验中自行接好,对象需用户在模拟实验平台上的运放单元搭接。
图3-2上图中,ADC1为模拟输入,DAC1为模拟输出,“DIN0”是C8051F管脚 P1.4,在这里作为输入管脚用来检测信号是否同步。
这里,系统误差信号E通过模数转换“ADC1”端输入,控制机的定时器作为基准时钟(初始化为10ms),定时采集“ADC1”端的信号,得到信号E的数字量,并进行PID计算,得到相应的控制量,再把控制量送到控制计算机及其接口单元,由“DAC1”端输出相应的模拟信号,来控制对象系统。
本实验中,采用位置式PID算式。
在一般的PID控制中,当有较大的扰动或大幅度改变给定值时,会有较大的误差,以及系统有惯性和滞后,因此在积分项的作用下,往往会使系统超调变大、过渡时间变长。
为此,可采用积分分离法PID控制算法,即:当误差e(k)较大时,取消积分作用;当误差e(k)较小时才将积分作用加入。
图3-3是积分分离法PID控制实验的参考程序流程图。
图3-3三、主要仪器设备计算机、模拟电气实验箱四、操作方法与实验步骤1.按照图3-2搭建实验仿真平台。
2.确定系统的采样周期以及积分分离值。
3.参考给出的流程图编写实验程序,将积分分离值设为最大值0x7F,编译、链接。
4.点击,使系统进入调试模式,点击,使系统开始运行,用示波器分别观测输入端R以及输出端C。
5.如果系统性能不满意,用凑试法修改PID参数,再重复步骤3和4,直到响应曲线满意,并记录响应曲线的超调量和过渡时间。
频域下基于参数调整的PID控制器设计与实现
频域下基于参数调整的PID控制器设计与实现PID控制器是一种常见的控制器,它在工业自动化系统中广泛应用。
为了提高控制系统的性能,研究人员一直在努力改进PID控制器的设计方法。
本文将重点介绍频域下基于参数调整的PID控制器设计与实现。
1. 简介PID控制器是基于目标系统的反馈信息进行控制的一种控制器。
它包括比例、积分和微分三个部分,通过调节这三个部分的参数来实现对控制系统的稳定性、快速响应和抑制干扰等目标的实现。
2. 频域分析频域分析是将系统的输入和输出信号转换到频率域上进行分析的方法。
在频域下,我们可以通过系统的频率响应来了解系统的特性,并根据这些特性来设计控制器。
3. 参数调整方法PID控制器的参数调整一直是控制领域的研究热点。
常用的参数调整方法包括试错法、Ziegler-Nichols方法和频域分析方法等。
3.1 试错法试错法是一种基于经验的参数调整方法。
根据系统的响应特性,通过改变PID 控制器的参数来改善系统的性能。
试错法常见的调整规则包括增大比例增益提高系统响应速度、增大积分时间消除系统稳态误差、增大微分时间抑制系统振荡等。
3.2 Ziegler-Nichols方法Ziegler-Nichols方法是一种经典的PID参数调整方法。
它通过试验得到系统的临界增益和临界周期,根据这些参数来计算出P、I和D的合适取值。
例如,根据临界增益和临界周期可以计算出比例增益、积分时间和微分时间的取值。
3.3 频域分析方法频域分析方法是一种相对较精确的PID参数调整方法。
它通过分析系统的频率响应来得到合适的PID参数。
具体方法包括根轨迹法、奈奎斯特曲线法和频率曲线法等。
这些方法可以通过计算系统的开环传递函数和频率响应曲线,然后根据要求设计合适的PID参数。
4. PID控制器的实现PID控制器可以通过硬件和软件两种方式实现。
在硬件实现中,我们可以使用模拟电路或数字电路来搭建PID控制器。
在软件实现中,我们可以使用编程语言来实现PID算法,并在微控制器上运行。
数字pid控制实验报告doc

数字pid控制实验报告doc数字pid控制实验报告篇一:实验三数字PID控制实验三数字PID控制一、实验目的1.研究PID控制器的参数对系统稳定性及过渡过程的影响。
2.研究采样周期T对系统特性的影响。
3.研究I型系统及系统的稳定误差。
二、实验仪器1.EL-AT-III型计算机控制系统实验箱一台2.PC计算机一台三、实验内容1.系统结构图如3-1图。
图3-1 系统结构图图中 Gc(s)=Kp(1+Ki/s+Kds)Gh(s)=(1-e-TS)/sGp1(s)=5/((0.5s+1)(0.1s+1))Gp2(s)=1/(s(0.1s+1))2.开环系统(被控制对象)的模拟电路图如图3-2和图3-3,其中图3-2对应GP1(s),图3-3对应Gp2(s)。
图3-2 开环系统结构图1 图3-3开环系统结构图23.被控对象GP1(s)为“0型”系统,采用PI控制或PID控制,可系统变为“I型”系统,被控对象Gp2(s)为“I型”系统,采用PI控制或PID控制可使系统变成“II 型”系统。
4.当r(t)=1(t)时(实际是方波),研究其过渡过程。
5.PI调节器及PID调节器的增益Gc(s)=Kp(1+K1/s)=KpK1((1/k1)s+1) /s=K(Tis+1)/s式中 K=KpKi ,Ti=(1/K1)不难看出PI调节器的增益K=KpKi,因此在改变Ki时,同时改变了闭环增益K,如果不想改变K,则应相应改变Kp。
采用PID调节器相同。
6.“II型”系统要注意稳定性。
对于Gp2(s),若采用PI调节器控制,其开环传递函数为G(s)=Gc(s)·Gp2(s)=K(Tis+1)/s·(本文来自:/doc/a1e402b1c081e53a580216fc700abb 68a882ad33.html 小草范文网:数字pid控制实验报告)1/s(0.1s+1)为使用环系统稳定,应满足Ti>0.1,即K1 7.PID 递推算法如果PID 调节器输入信号为e(t),其输送信号为u(t),则离散的递推算法如下:u(k)=u(k-1)+q0e(k)+q1e(k-1)+q2e(k-2)其中 q0=Kp(1+KiT+(Kd/T))q1=-Kp(1+(2Kd/T))q2=Kp(Kd/T)T--采样周期四、实验步骤1.连接被测量典型环节的模拟电路(图3-2)。
基于PID的液位控制系统的设计与实现

基于PID的液位控制系统的设计与实现液位控制系统是工业生产过程中常用的控制技术之一、PID(比例-积分-微分)控制器是一种经典的控制算法,可以有效地实现液位控制。
本文将设计和实现基于PID的液位控制系统。
液位控制系统一般由传感器、执行器和控制器组成。
传感器用于测量液位高度,执行器用于调节液位,而控制器则根据测量值和设定值之间的差异来控制执行器的运动。
在这个过程中,PID控制器起到关键的作用。
首先,我们需要设计传感器来测量液位高度。
常见的液位传感器有浮子式、压力式和电容式传感器。
根据实际应用需求,选择适合的传感器。
传感器的输出值将作为反馈信号输入到PID控制器中。
其次,我们需要选择合适的执行器来调节液位。
根据液位的控制需求,可以选择阀门、泵等执行器。
这些执行器的动作是由PID控制器输出的控制信号来控制的。
接下来,我们将重点介绍PID控制器的设计和实现。
PID控制器由比例、积分和微分三个部分组成。
比例部分输出和误差成正比,积分部分输出和误差的累积和成正比,微分部分输出和误差的变化率成正比。
PID控制器的公式为:输出=Kp*错误+Ki*积分误差+Kd*微分误差其中,Kp、Ki、Kd是PID控制器的三个参数。
这些参数的选择对于系统的稳定性和响应速度有重要影响。
参数的选择需要通过实验和调试来确定。
在PID控制器的实现中,有两种常用的方式:模拟PID和数字PID。
模拟PID控制器基于模拟电路实现,适用于一些低要求的应用场景。
数字PID控制器基于微处理器或单片机实现,适用于更复杂的控制场景。
在具体的实现中,我们需要先进行系统建模和参数调整。
系统建模是将液位控制系统转化为数学模型,以便进行分析和设计。
常见的建模方法有传递函数法和状态空间法。
参数调整是通过实验和仿真等手段来确定PID控制器的参数。
接下来,根据建模和参数调整的结果,我们可以进行PID控制器的实际设计和实现。
在设计过程中,需要注意选择合适的控制算法和调试方法,以保证系统的稳定性和性能。
数字PID控制器设计
数字PID控制器设计实验报告学院电子信息学院专业电气工程及其自动化学号姓名指导教师杨奕飞数字PID控制器设计报告一.设计目的采用增量算法实现该PID控制器。
二.设计要求掌握PID设计方法及MATLAB设计仿真。
三.设计任务设单位反馈系统的开环传递函数为:设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。
采用增量算法实现该PID控制器。
四.设计原理数字PID原理结构图PID控制器的数学描述为:式中,Kp为比例系数;T1为积分时间常数;T D为微分时间常数。
设u(k)为第K次采样时刻控制器的输出值,可得离散的PID表达式为:使用模拟控制器离散化的方法,将理想模拟PID控制器D(s)转化为响应的理想数字PID控制器D(z).采用后向差分法,得到数字控制器的脉冲传递函数。
2.增量式PID控制算法u(k)=u(k-1)+Δu(k)增量式PID控制系统框图五.Matlab仿真选择数字PID参数利用扩充临界比例带法选择数字PID参数,扩充临界比例带法是以模拟PID调节器中使用的临界比例带法为基础的一种数字PID参数的整定方法。
其整定步骤如下1)选择合适的采样周期T:,因为Tmin<1/10 T,选择采样周期为0.003s;2)在纯比例的作用下,给定输入阶跃变化时,逐渐加大比例作用Kp(即减小比例带δ),直至系统出现等幅震荡,记录比例增益Kr,及振荡周期Tr 。
Kr成为临界振荡比例增益(对应的临界比例带δ),Tr成为临界振荡周期。
在Matlab中输入如下程序G=tf(1,[1/150,36/150,185/150,1]);p=[35:2:45];for i=1:length(p)Gc=feedback(p(i)*G,1);step(Gc),hold onend;axis([0,3,0,2.3])得到如下所示图形:改变其中的参数P=[35:2:45]为p=[40:1:45]得到下图曲线,得Kr约为43,Tr 约为0.5.在smulink中建立如下模型,可得Kr=43.4,Tr=0.45。
基于FPGA的数字PID控制器设计

实 现 数 字 P D控 制 器 的设 计 ,提 高 系 统 的 运 算 速 I 度 、 少系统 的体 积 、 强其 可靠 性 。 减 增
2 各 功 能模 块 的 设计 1 P D 控 制 算 法 I
在此将 详 细描述 各模块 的具 体实 现过程 。使 用
完整 的 P D控 制表 达式 为 : I
式() 2 为增量 型 P D控 制算 法 。从式 ( ) I 2 可看 出增 量
分 、积分参数 的控制策 略来 达到 最佳 系统 响应 和控
制效 果 。但 是采 用 微处 理 器来 实 现 时 . 能完 全 避 不
型 控制算 法 只与前 三次 采样值 有关 ,不需 要大量 的
数据 存储 和 累加 . 因而不 易引起 误差 累积 , 计算量 小
馈 值 y 求偏 差 , ) 然后 把 所 得 的 偏差 值 传 给 后续 模 块进 行处 理 , 图 2所示 。复位 信号 rst 如 ee 为低 电平 时 复位 , 则 , 否 在输 入 时钟 的上 升沿 到 达 时 , 在使 能
收 稿 日期 :o 9 0 一 3 2 o — 9 l
作 者简 介 : 昭 明 (9 5 , , 陈 18 一)男 四川 人 , 国航 天 科技 集 团第 四研 究 院 4 1 硕 士研 究 生 , 究 方 向为 测 试 计 量技 术及 仪 器 。 中 0所 研
且实 时性 好 。其结构 原理 如 图 1 所示 。
免程序 跑 飞和计算 机误 动作 对整 个控制 系统 的破 坏
性 影 响 。现场 可编 程 门阵列 F G 的出现 为 P D控 PA I 制 器 的设 计提 供 了新 的实现手 段 。 P A集成度 高 、 FG 体 积小 、 功耗低 、 靠性 高 、 可 设计 方 法灵 活 , 仅具有 不 反 复编 程 、 复探 险 、 复使 用 等特 点 , 能 得 到实 反 反 更
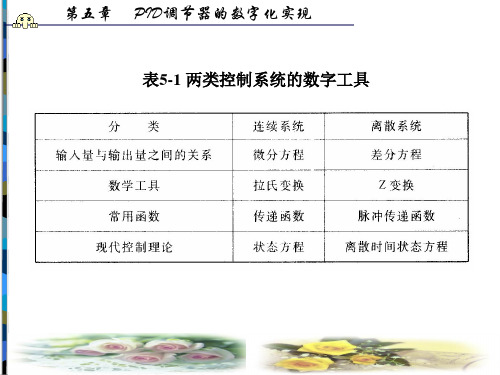
2数字控制器的设计数字控制器的PID设计方法1

即实部
图5-23 3种离散化方法s的左半平面映射到z平面的图
令z=R+jI 则
即R 2-1+I 2<0 或 R 2+I 2<1
5.2.1 PID设计方法 不同点: 前向差分法的特点:
将S左半平面变换到Z平面的σ=1左边平面;
稳定的D(s)可能变换成不稳定的D(z)。 后向差分法的特点:
将整个S左半平面变换到Z平面(1/2,0)半径1/2的圆内;
稳定的D(s)变换成稳定的D(z),不稳定D(s)可变换成稳定D(z). 双线性变换的特点:
将整个S左半平面变换到Z平面的单位圆内; 稳定的D(s)变换成稳定的D(z),不稳定D(s)变换成不稳定D(z). 共同点:
(1)D(z)不能保持D(s)的频率响应。 (2) 不用查表,使用方便。
5.2.1 PID设计方法
双线性变换法的几何意义是梯形法求积分,如图5-22所示。 – 设积分控制规律为 – 经过变换,数字控制器为
图5-21 双线性变换的几何意义
jA
2 T
1 e jDT 1 e jDT
2 e e jDT / 2
jDT / 2
T
e jDT / 2
e jDT / 2
2 T
2 j sin(DT / 2) 2cos(DT / 2)
用时域表示为:
u(k) a1u(k 1) a2u(k 2) ... anu(k n) b0e(k) b1e(k 1) ... bme(k m)
j 2 tan DT
T2
s域角频率A
(s域)
A
2 T
tan
DT
2
z域角频率为D
采样频率足够小
A
2 T
PID温度控制器的设计
1
(1)在对温度控制发展现状、系统控制要求进行研究的基础上,选择了整个控制系统的控制方案;
(2)完成系统的硬件设计,包括采样电路、A/D转换电路、主控制电路、保护电路等等的设计;
(3)完成该系统的软件设计,包括主程序模块、控制运算模块、数据输入输出及处理模块等一些子功能模块的设计;
1.
采用PID控制原理研制成适合用于小功率器件的温度控制器,该控制器能达到很好的控制效果,若精心选择PID的各种参数,温度控制的精度可以达到0.05℃,完全可以保证器件的正常工作。在一定的控制系统中,首先将需要控制的被测参数(温度)由传感器转换成一定的信号后再与预先设定的值进行比较,把比较得到的差值信号经过一定规律的计算后得到相应的控制值,将控制量送给控制系统进行相应的控制,不停地进行上述工作,从而达到自动调节的目的。PID是目前广泛使用的控制方法,其控制规律的数学模型为:
实现PID控制原理的具体方法因系统的不同而不同。在我们的系统中,采用了增量式计算方法,而控制量的输出则采用了位置式的输出形式。在数值控制系统中,其控制规律的数学模型演化为:
其中:T为采集周期;ei、ei-1、ei-2为此时刻、前一时刻、再前一时刻的差值信号。这种方法的好处在于只需保持前三时刻的差值信号,同时输出控制量的初始设定值不必准确,就能较快地进入稳定控制过程。
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。现在一般采用的是临界比例法。利用该方法进行PID控制器参数的整定步骤如下:(1)首先预选择一个足够短的采样周期让系统工作;(2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期;(3)在一定的控制度下通过公式计算得到PID控制器的参数。
基于matlab的智能PID控制器设计和仿真毕业设计论文
基于MATLAB的智能PID控制器设计与仿真摘要在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
传统的PID控制器原理十分简单,即按比例、积分、微分分别控制的控制器,但是他的核心也是他的难点就是三个参数(比例系数Kp、积分系数Ki、微分系数Kd)的整定。
参数整定的合适,那么该控制器将凭借结构简单、鲁棒性好的优点出色的完成控制任务,反之则达不到人们所期望的控制效果。
人工神经网络模拟人脑的结构和功能而形成的信息处理系统,是一门十分前沿高度综合的交叉学科,并广泛应用于工程领域。
神经网络控制是把自动控制理论同他模仿人脑工作机制的数学模型结合起来,并拥有自学习能力,能够从输入—输出数据中总结规律,智能的处理数据。
该技术目前被广泛应用于处理时变、非线性复杂的系统,并卓有成效。
关键词自适应PID控制算法,PID控制器,神经网络Design and simulation of Intelligent PID Controllerbased on MATLABAbstractPID controller ,the control method which is developed on the basis of classical control theory, is widely used in industrial production.The Principle of traditional PID controller is very simple, which contains of the proportion, integral, differential three component, but its core task and difficulties is three parameter tuning(proportional coefficient Kp, integral coefficient Ki and differential coefficient KD).If the parameter setting is suitable, the controller can accomplish the control task with the advantages of simple structure and good robustness;but on the contrary, it can not reach the desired control effect which we what.Artificial neural network , the formation of the information processing system which simulate the structure and function of the human brain , is a very high degree of integration of the intersection of disciplines, and widely used in the field of engineering. Neural network control ,combining automatic control theory and the imitate mathematical model of the working mechanism of human brain , has self-learning ability, and can summarize the law of the input-output data , dealing with data intelligently .This technique has been widely used in the process of time-varying, nonlinear and complex system, and it is very effective.Key W ord:Adaptive PID control algorithm,PID controller,Neural network目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 课题研究背景及意义 (1)第二章 PID控制器 (2)2.1 PID控制原理 (2)2.2常规PID控制器的算法理论 (3)2.2.1 模拟PI D控制器 (3)2.2.2 数字P I D控制算法 (3)2.2.3常规PID控制的局限 (5)2.2.4 改进型PID控制器 (5)第三章人工神经网络 (8)3.1 人工神经网络的原理 (8)3.2神经网络PID控制器 (8)3.2.1神经元PID控制器 (8)3.2.2 单神经元自适PID应控制器 (9)3.3 BP神经网络参数自学习的PID控制器 (12)第四章MATAB仿真 (16)4.1 仿真过程 (16)第五章结论与展望 (24)致谢 (25)参考文献 (25)华东交通大学毕业设计(论文)第一章绪论1.1 课题研究背景及意义在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
计算机控制技术PID调节器的数字化实现教学PPT
y
1 Ti
e(t)dt
(5-2)
式中:Ti是积分时间常数,它表示积分速度的大小, Ti越大,
积分速度越慢,积分作用越弱。 积分作用的响应特性曲线如 图5-2所示。
PID调节器的数字化实现
积分作用的特点是调节器的输出与偏差存在的时间有关, 只要有偏差存在,输出就会随时间不断增长,直到偏差消除, 调节器的输出才不会变化。因此,积分作用能消除静差,但 从图5-2中可以看出,积分的作用动作缓慢, 而且在偏差刚 一出现时,调节器作用很弱,不能及时克服扰动的影响, 致 使被调参数的动态偏差增大,调节过程增长, 它很少被单独 使用。
PID调节器的数字化实现
模拟控制器的离散化方法
从信号理论角度来看,模拟控制器 就是模拟信号滤波器应用于反馈控制系 统中作为校正装置。滤波器对控制信号 中有用的信号起着保存和加强的作用, 而对无用的信号起着抑制和衰减的作用。 模拟控制器离散化成的数字控制器,也 可以认为是数字滤波器。
PID调节器的数字化实现
微分调节器的微分方程为
de(t) y TD dt
式中TD为微分时间常数。
(5-4)
PID调节器的数字化实现
微分作用响应曲线如图5-4所示。从图中可以看出,在t=t0 时加入阶跃信号,此时输出值y变化的速度很大:当t>t0时,其 输出值y迅速变为0。微分作用的特点是,输出只能反应偏差输 入变化的速度,而对于一个固定不变的偏差, 不管其数值多 大,根本不会有微分作用输出。因此,微分作用不能消除静差, 而只能在偏差刚刚出现时产生一个很大的调节作用。 它一般 不单独使用,需要与比例调节器配合使用,构成PD调节器。 PD调节器的阶跃响应曲线如图5-5所示。
PID调节器的数字化实现
PID控制系统---P I D参数的作用 控制系统专用
Kd Ts
[ e ( k ) 2 e ( k 1) e ( k 2 )]
增量型与位置型的比较
(1)增量型算法不需要累加,控制 量增量的确定仅与最近几次误差采样 值有关,计算误差或计算精度问题, 对控制量的计算影响较小。而位置型 算法要用到过去的误差的累加值,容 易产生大的累加误差。 (2)增量型算法得出的是控制量的 增量,误动作影响小,不会影响严重 系统的工作。而位置型算法的输出是 控制量的全量输出,误动作影响大。
void pid_init() { r=INPUT; y_cur=0; y_pre=0; u_pre=0; e_pre=0; e_last=0; } float pid_process() { float q0, q1, q2; e_cur=r-y_cur; //e(k)=r-y(k) q0=(float)( KP*(1+T/TI+TD/T)); q1=-KP-2*KP*TD/T; q2=KP*TD/T; u_aug=q0*e_cur+q1*e_pre+q2*e_last; //△u(k)=q0*e(k)+q1*e(k-1)+q2*e(k-2) u_cur=u_aug+u_pre; //u(k)=△u(k)+u(k-1)
PID参数整定
试凑法(先比例,后积分,再微 分) 扩充临界比例度法 扩充响应曲线法
增量式流程图
用计算机实现PID控制
#include<reg51.h> #define uchar unsigned char #define uint unsigned int #define KP 100 #define TI 2 #define TD 1 #define T 1 sbit start=P3^0; sbit OE=P3^1; sbit EOC=P3^2; float y_cur; //y(k) float y_pre; //y(k-1) float e_cur; //e(k) float e_pre; //e(k-1) float e_last; //e(k-2) float u_cur; //u(k) float u_pre; //u(k-1) float u_aug; //△u(k) uchar AD; uint INPUT=3; uint r;
数字PID控制器的设计

T
(1 j
T
)2
所以
T 2 T arctan arctan 2 arctan T 2 2 2 1( ) 1( ) 2 2
由此得出
T T
2(
T
)
与 T 的对应关系:
: 0 ~ : 0 ~
T : 0 ~ T : 0 ~
7.2 数字控制器的PID设计方法
• 7.2.1 PID设计方法
计算机控制系统的核心 数字控制器
实现各种不同要求的控制功能。
如何设计数字控制器? (1)给定控制对象 (2)给定性能指标
设计出满足控制性能的控制规律以 及与此对应的计算机编程算法。
数字控制器的两类设计方法
输入r(r) 计算机 D/A 被控对象 输出c(t)
设微分的控制规律为: u (t )
S域的传递函数为:
对微分控制规律前向差分变换,可得: u ( k ) e( k 1) e( k )
de (t ) dt U ( s) D( s ) s E ( s)
T
e(k 1) z e(k )
e(k 1) e(k ) z 1 u (k ) e( k ) T T
ek2其中其中如果控制系统的执行机构采用步进电机如果控制系统的执行机构采用步进电机在每个采样周在每个采样周期期控制器输出的控制量是相对于上次控制量的增加控制器输出的控制量是相对于上次控制量的增加此时控制器应采用增量型数字此时控制器应采用增量型数字pidpid控制算法控制算法其控制原理其控制原理如下图所示如下图所示
2 2
数字控制器为:
U ( z ) T 1 z 1 1 D( z ) D( s) 2 1 z 1 1 1 s 2 1 z E( z) 2 1 z T 1 z 1 T 1 z 1
实验三 PID控制器设计及其参数整定---已完成

实验三 PID 控制器设计及其参数整定一、实验目的1) 通过本实验,掌握使用Simulink 仿真设计连续和离散PID 控制器的方法。
2) 掌握对给定控制系统进行PID 控制器参数在线实验工程整定的方法。
二、实验原理PID 控制是最经典、应用最广泛的控制方法,是单回路控制系统主要的控制方法,是其他控制思想的基础。
本实验针对被控对象,选定控制器的调节规律,在控制器的调节规律已经确定的情况下,控制系统的品质主要决定于控制器参数的整定。
1. 连续PID 控制器本实验采用的PID 控制器传递函数为:111()(1)(1)C p d d i i G s K T S T S T S T Sδ=++=++ 或写成:()iC p d K G s K K S S=++ 有,p i d p d iK K K K T T ==其中K p 、K i 、K d 分别为比例系数、积分系数和微分系数;T i 、T d 分别为积分时间常数和微分时间常数;δ为比例度。
控制系统的Simulink 仿真图如图1所示。
连续PID 控制器如图2所示。
根据不同的参数设置,可以得到单纯的比例控制、比例积分控制、比例微分控制以及比例积分微分控制等不同的控制系统。
控制器参数的工程整定实验法,是通过对典型输入响应曲线所得到的特征量,按照动态特性参数法、衰减曲线法、临界比例度法、或经验法中的某一种方法,求得控制器的各个参数,进行工程整定,使系统的性能达到最佳。
图1 控制系统Simulink 仿真图图2 连续PID 控制器Simulink 仿真图2. 离散PID 控制器将描述模拟PID 控制器的微分方程式化为差分方程,即为数字PID 控制算法。
1()(1)()()()kp i di e k e k u k K e k K T e i K T=--=++∑因为上式包含的数字积分项,需要存储过去全部偏差量,而且累加运算编程不太方便,计算量也较大,所以在应用中,通常都是将上式改为增量算法。
基于MATLAB的数字PID控制器设计及仿真分析资料
基于MATLAB的数字PID控制器设计及仿真分析摘要PID控制作为历史最为悠久,生命力最强的控制方式一直在生产过程自动化控制中发挥着巨大的作用。
PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛用于过程控制和运动控制中。
数字PID控制算法是将模拟PID离散化而得到的,各参数有着明显的物理意义,而且调整方便,所以PID控制器很受工程技术人员的喜爱。
本论文主要实现基于MATLAB的数字PID控制器设计及仿真。
首先介绍了传统的模拟PID控制方法,包括比例控制方法、比例积分控制方法、比例积分微分控制方法等。
接下来,介绍了数字PID控制。
随着时代的发展,科技的进步,传统的模拟PID控制方法不能满足人们的需求,数字PID控制的改进算法也便随之而来。
本文最后,应用MATLAB软件,在实验的环境下实现了其设计及仿真。
本次毕业设计用来完成数字PID控制器的设计,并通过MATLAB实现其仿真同时加以分析。
通过查阅文献得知,与传统模拟PID控制器相比较,该控制器具有良好的灵活性,而且可得到精确的数学模型。
另外,基于MATLAB的数字PID 控制器设计及仿真,充分的利用了MATLAB的实验环境,整个设计验证了数字PID的广泛可实现性及准确性。
关键词:PID控制;模拟PID控制器;数字PID控制器;MATLAB仿真;Design and simulation analysis of Digital PID ControllerMATLAB-basedAbstractAs the most age-old and powerful control mode, PID control always has had a great effect on the automatic control of the production process. PID control is one of the first developed control strategy, because of thesimple algorithm,great robust and high reliability, it is widely used in process control and motor control. Digital PID control algorithm is gotten by discreting the analog PID control, and the parameters have obvious physical meaning and facility adjustment, so PID controller is popular with engineering and technical personnel.In the paper, the main idea is to accomplish MATLAB-based digital PID controller design and simulation analysis. In the first place, the traditional analog PID control methods is introduced, including proportional control methods, proportional integral control and proportional integral differential control. In the second place, the digital PID control methods are offered. With the development of the times, the advancement of technology, traditional analog PID control method cannot make a satisfaction, then digital PID control is followed. At last,the application of MATLAB software to achieve their design and simulation is easy to accomplish.The graduation project is to complete the digital PID controller design and simulation through MATLAB simulation and analysis. It is known that through the literature, compare with traditional PID controller, the controller has good flexibility and precision of the mathematical models available. In addition, in the number of MATLAB-based PID controller design and simulation, the MATLAB experiment environment is used comprehensively. The entire design is confirmed the wide range and accuracy of digital PID controller.Key words:PID control;analog PID controller;digital PID controller;MATLAB simulatio目录摘要 (I)ABSTRACT...................................................................... I I 第1章绪论.. (1)1.1课题目的及意义 (1)1.2数字PID控制器的研究现状 (2)第2章 PID控制器 (3)2.1传统PID控制器概述 (3)2.2PID控制器的基本原理 (5)2.2.1 比例(P)调节 (6)2.2.2 比例积分(PI)调节 (7)2.2.3 比例积分微分(PID)调节 (9)第3章数字PID控制器 (13)3.1数字PID控制系统 (13)3.2数字PID控制的基本算法 (14)3.2.1 位置式PID控制算法 (14)3.2.2 增量式PID控制算法 (16)3.2.3 位置算式与增量算式的比较 (17)第4章数字PID的改进算法 (19)4.1积分算法的改进 (20)4.1.1 积分分离法 (21)4.1.2 变速积分法 (24)4.1.3 遇限消弱积分法 (25)4.1.4 梯形积分法 (26)4.2微分算法的改进 (27)4.2.1 不完全微分PID控制算法 (27)4.2.2 微分先行PID控制算法 (30)4.3带死区的PID控制算法 (32)第5章基于MATLAB的数字PID控制器设计及仿真 (34)5.1位置式PID控制算法仿真实例 (34)5.2增量式PID控制算法仿真实例 (35)参考文献 (37)谢辞 (37)第1章绪论1.1 课题目的及意义PID控制器又称为PID调节器,是按偏差的比例P、积分I、微分进行控制的调节器的简称,它主要针对控制对象来进行参数调节。
数字PID控制器
PI 增量式一般表达式为 u ( k ) k p [ e ( k ) e ( k 1 )] 将本问题 k pT TI e(k )
PI 差分方程写成一般表达
u ( k ) 3[ e ( k ) e ( k 1 )] 20 e ( k ) kP 3 k pT TI 20 , T I 3 20
所以前馈完全补偿的条
G( s ) D( s ) G ( s ) 0 n n U( s ) G( s ) n n 即 D( s ) n n( s) G ( s)
例、已知广义被控对象
G (s) k2 1 T2 s e
2 s
, 干扰通道
G( s ) n
k1 1 T1 s
还可写成递推型PID控制算式
2. S域下PID表达式的离散化
将模拟控制器的传递函数
G c ( s ) K P (1 1 TI s TD s)
用后向差分方法等效离散化(s=(1-z-1)/T),可得PID控 制规律的脉冲传递函数形式
D (z) Gc (s )
s 1 z T
1
K P [1
15 T 15 Z
100 . 8 138 . 3 Z
82 . 2 Z
1
1 0 .5 Z
前馈控制器输出
u 2 ( k ) 0 . 5 u 2 ( k 1) 100 . 8 p ( k ) 138 . 3 p ( k 1) 82 . 2 p ( k 2 )
1、微分先行PID控制器
标准PID在阶跃偏差输入时各控制时 刻PID响应。
e(t) 突加给定值扰动, 会给控制系统带来 冲击,使超调量过 大,执行机构动作 剧烈。
模拟—数字混合实验装置中的数字PID控制器设计
yn 1 K [( 一 ) ( 一 ) p n 1 e
÷ ()
( 一 ) 一 ) ] n 一(一 3 1 n 2
一
() 3
用 ( ) 减 ( ) 并整 理得 : 2式 3式
,) ( 1 ( ≠ ≥e) ( 等)n1 ( 2 (=n ) 1 +)n 1 e一 + n ) n y一 + + (一 + ( ) 一
2 .硬 件 的 环 境
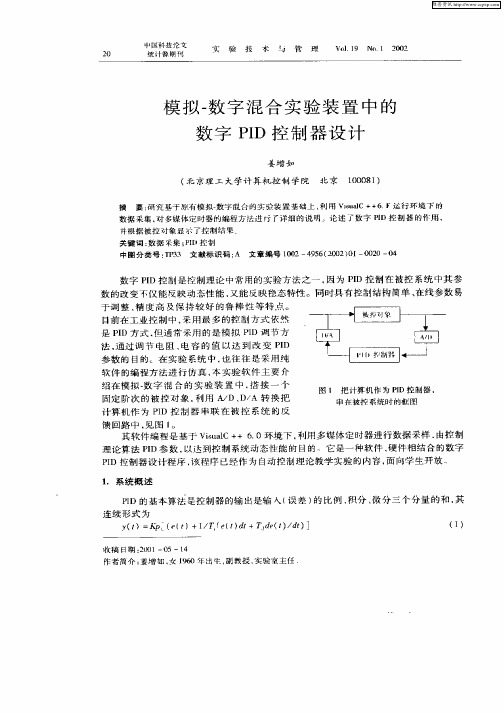
模 拟 实 验 装 置 为 自动 控 制 理 论 实 验 箱 , 由运 算 放 大 器 、 阻 容 、 压 管 和 二 极 管 等 电 电 稳 组成 , 来 形成 比例 、 分 、 例 积 分 、 用 积 比 比例 微 分 、 性 和 非 线 性 等 典 型 环 节 , 惯 把 它 们 任 意 组 合 就 可 构 成 各 种 典 型 的 模 拟 控 制 系 统 。通 过 A D 和 D A 转 换 / / 板 再 与 计 算 机 连 接 , 可 形 成 闭 环 控 即 制 。计 算 机 既 能 充 当控 制 器 , 能 作 为 又
计 算 机 作 为 PD 控 制 器 串 联 在 被 控 系 统 的 反 I
图 1 把 计算 机作 为 PD控 制 器 I 申在 被控 系统 时 的框 图
馈 回 路 中 , 图 l 见 。 其 软 件 编 程 是 基 于 Vsa + 6 0环 境 下 , 用 多 媒 体 定 时 器 进 行 数 据 采 样 , i l u C+ . 利 由控 制 理 论 算 法 PD参 数 , 达 到 控 制 系 统 动 态 性 能 的 目的 它 是 一 种 软 件 、 件 相 结 合 的 数 字 I 硬 PD控 制 器 设 计 程序 , 程 序 已经 作 为 自动 控 制 理 论 教 学 实 验 的 内 容 , 向学 生 开 放 。 I 该 面
第三章--PID控制

k1
u(k1)KPe(k1)KI e(j)KD[e(k1)e(k2)] j0
u(k)u(k)u(k1) KP[e(k)e(k1)]Kie(k)KD[e(k)2e(k1)e(k2)]
增量型控制算式具有以下优点: (1)计算机只输出控制增量,即执行机构位置的变化部分,控制算
偏差的微分调节来消除系统惯性的影响,提高动态响应
速度,这就形成了按偏差PID调节的系统。其控制结构
如下图所示。
23
KP
r(t)
e(t)
KP
TI s
KPTDs
u(t)
y(t)
G0(s)
模拟PID控制器图的5.7微分模方拟程PID为控制: 系统
u(t) KP[e(t)T1I
t
e(t)dt
0
TD
de(t)] dt
以前,我们在设计连续系统时,只要给定被控对象的模型, 期望的性能指标,我们就可以设计了。因此,我们设计的第一步 就是找一种近似的结构,来设计一种假想的连续控制器D(S),这 时候我们的结构图可以简化为:
r(t) + e(t)
u(t)
y(t)
_
D(s)
G(s)
已知G(S)来求D(S)的方法有很多种,比如频率特性法、根轨迹 法。
第三章 数字控制器模拟化设计
1
参考文献
王正林.过程控制与Simulink应用 刘金琨.先进PID控制MATLAB仿真
2
第一节 模拟控制器与数字控制器
在数字控制系统中用数字控制器代替模拟控制器。
控制过程如下:首先通过模拟量输入通道对控制参数进行 采集,并将其转换为数字量,然后送入计算机后按一定的 算法进行处理到期望的控制 效果。
(完整版)数字PID及其算法
数字PID 及其算法主要内容:1、PID 算法的原理及数字实现2、数字PID 调节中的几个实际问题3、几种发展的PID 算法4、PID 参数的整定方法一、概述几个概念:1、程序控制:使被控量按照预先规定的时间函数变化所作 的控制,被控量是时间的函数。
2、顺序控制:是指控制系统根据预先规定的控制要求,按 照各个输入信号的条件,使过程的各个执行机构自动地按预 先规定的顺序动作。
3、PID 控制:调节器的输出是输入的比例、积分、微分的 函数。
4、直接数字控制:根据采样定理,先把被控对象的数学模 型离散化,然后由计算机根据数学模型进行控制。
5、最优控制:是一种使控制过程处在某种最优状态的控制。
6、模糊控制:由于被控对象的不确定性,可采用模糊控制。
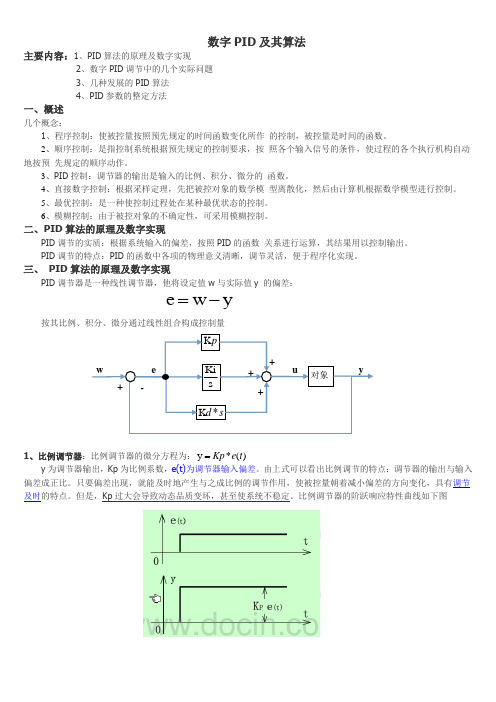
二、PID 算法的原理及数字实现PID 调节的实质:根据系统输入的偏差,按照PID 的函数 关系进行运算,其结果用以控制输出。
PID 调节的特点:PID 的函数中各项的物理意义清晰,调节灵活,便于程序化实现。
三、 PID 算法的原理及数字实现PID 调节器是一种线性调节器,他将设定值w 与实际值y 的偏差:按其比例、积分、微分通过线性组合构成控制量1、比例调节器:比例调节器的微分方程为:)(*y t e Kp =y 为调节器输出,Kp 为比例系数,e(t)为调节器输入偏差。
由上式可以看出比例调节的特点:调节器的输出与输入偏差成正比。
只要偏差出现,就能及时地产生与之成比例的调节作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。
但是,Kp 过大会导致动态品质变坏,甚至使系统不稳定。
比例调节器的阶跃响应特性曲线如下图yw e -=sd *K s Ki pK 对象 we + - + + + u y2、积分调节器:积分作用是指调节器的输出与输入偏差的积分成比例的作用,其作用是消除静差。
积分方程为:TI 是积分时间常数,它表示积分速度的大小,TI 越大,积分速度越慢,积分作用越弱。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字PID控制器设计
实验报告
学院电子信息学院
专业电气工程及其自动化
学号
姓名
指导教师杨奕飞
数字PID控制器设计报告
一.设计目的
采用增量算法实现该PID控制器。
二.设计要求
掌握PID设计方法及MATLAB设计仿真。
三.设计任务
设单位反馈系统的开环传递函数为:
设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。
采用增量算法实现该PID控制器。
四.设计原理
数字PID原理结构图
PID控制器的数学描述为:
式中,Kp为比例系数;T1为积分时间常数;T D为微分时间常数。
设u(k)为第K次采样时刻控制器的输出值,可得离散的PID表达式为:
使用模拟控制器离散化的方法,将理想模拟PID控制器D(s)转化为响应的理想数字PID控制器D(z).采用后向差分法,得到数字控制器的脉冲传递函数。
2.增量式PID控制算法
u(k)=u(k-1)+Δu(k)
增量式PID控制系统框图
五.Matlab仿真选择数字PID参数
利用扩充临界比例带法选择数字PID参数,扩充临界比例带法是以模拟PID调节器中使用的临界比例带法为基础的一种数字PID参数的整定方法。
其整定步骤如下
1)选择合适的采样周期T:,因为Tmin<1/10 T,选择采样周期为
0.003s;
2)在纯比例的作用下,给定输入阶跃变化时,逐渐加大比例作用
Kp(即减小比例带δ),直至系统出现等幅震荡,记录比例增益Kr,及振荡周期Tr 。
Kr成为临界振荡比例增益(对应的临界比例带δ),Tr成为临界振荡周期。
在Matlab中输入如下程序
G=tf(1,[1/150,36/150,185/150,1]);
p=[35:2:45];
for i=1:length(p)
Gc=feedback(p(i)*G,1);
step(Gc),hold on
end;
axis([0,3,0,2.3])
得到如下所示图形:
改变其中的参数P=[35:2:45]为p=[40:1:45]得到下图曲线,得Kr约为43,Tr 约为0.5.
在smulink中建立如下模型,可得Kr=43.4,Tr=0.45。
3.选择控制度
控制度的定义为数字调节器和模拟调节所对应的国度过程的误差平方积分之
比,即控制度=
2
2
D
e dt
e dt
∞
∞
⎰
⎰
式中,
D
e为数字调节器的控制误差;e为模拟调节器的控
制误差.当控制度为1.05时,数字调节器鱼模拟调节器的控制效果相当;当控制
度为2时,数字调节器比模拟调节器的控制效果差一倍;在此选控制度为1.05。
4.按选择的控制度指标及Tr,Kr 实验测得值
由查表选择相应的计算公式计算采样周期:T=0.014*Tr=0.0063,Kp=0.63*Kr=27.342,TI=0.49*Tr=0.2205,TD=0.14*Tr=0.063;
P I i I K T K K T T ==
=0.7812,d P D D K K T
K T T
===273.42 扩充临界比例度法整定计算公式表
控制度 控制规律
T/Tr Kp/Kr Ti/Tr Td/Tr 10.5
PI PID 0.03 0.014 0.55
0.63 0.88 0.49
0.14 1.20 PI PID 0.05 0.043 0.49 0.47 0.91 0.47
0.16 1.50 PI PID 0.14 0.09 0.42 0.34 0.99 0.43
0.20 2.00 PI PID 0.22 0.16 0.36 0.27 1.05 0.40
0.22 模拟控制器 PI PID 0.57 0.70 0.83 0.50
0.13 简化扩充临
界比例法法
PI PID
0.10
0.45 0.60
0.83 0.50
0.125
六.Matlab/Simulink 控制系统建模
1.控制器
2.采用后向差分离散化可得:
D(Z)=U(Z)/E(Z)=KP(1-Z ¯¹)+KI+KD(1-Z ¯¹)^2=[(KP+KI+KD)Z^2-(KP+2KD)Z+KD]/Z^2
将KP=0.63*Kr=25,KI=Ki*T=0.77,KD=230代入 D(z)=(297.77z^2-567z+270)/z^2
3.仿真模型图
4.输出阶跃响应曲线
5.试凑法微调参数
Kp Ki Kd 超调量调整时间
27 0.77 230 ————————————
40 5 230 25 0.7
50 5 230 15 0.6
50 5.5 230 19 0.5
6.最终PID参数及输出响应曲线
采用试凑法得到一组数据:kp=50,ki=5.5,kd=250
输出响应曲线为:
七.心得体会
通过这次课程设计,认识了自动控制领域最常用的PID控制技术,基本掌握了PID控制的基本规律,同时也认识到自动控制系统的复杂性。
在运用MATLAB软件时经常会碰到一些问题,而我们手中的资料有限,时间和精力有限,并不能解决所有问题。
比如在PID控
制时,一旦选定了Ki和Kd后,超调量随Kp的变化并不明显,这是我无法理解的,当Kp增加时,系统仅仅提高了响应的快速性,而超调量并没有显著的变化。
又如,在PD控制时,当Kd和Kp取值足够大时,便可以使响应曲线完全理想化,即响应时间趋于0,超调量趋于0,在本系统中也满足足够的稳态精度,我就会这样怀疑,并不是所有系统采用PID控制效果一定比其他控制效果要好。
所以这些问题有待于在今后的学习和实验中寻求答案。
八.参考文献
1计算机控制技术(第二版)姜学军X新国李晓静编著。