湖南大学考研题 自动控制原理
湖南大学考研真题 湖南大学研究生入学考试专业课真题
湖南大学考研真题,湖南大学研究生入学考试真题湖南大学马克思主义学院西方哲学史2004——2006,2008,2010马克思主义哲学原理2008,2010政治学原理2006,2008中国共产党思想政治工作史论2006,2008自然辩证法原理2000科学技术史2005岳麓书院西方哲学史2004——2006,2008,2010中国哲学史2008教育学专业基础综合(全国统)2007——2009历史学专业基础(全国统考试卷)2007——2009中国思想史2000经济与贸易学院经济学原理2003——2006,2008——2010西方经济学2001——2003经济学2000——2001经济学综合(含微观经济学、宏观经济学)2005——2010经济学综合(含宏观经济学、财政学)2006数据结构2002——2004,2006,2008数据结构与PASCAL 2000——2001计算机组成与体系结构2006,2008计算机组成原理2001管理学与管理系统工程2001管理学原理(管理科学与工程、工商管理专业)2002——2006,经营管理与市场营销2003经营决策和市场营销2001国际贸易理论与实务2001国际贸易学2001高等代数2002——2010数学分析1999——2010环境工程微生物学2001——2008金融学院金融学基础(联考)2002——2010经济学2000——2001经济学原理2003——2006,2008——2010西方经济学2001——2003会计学院经济学综合(含微观经济学、宏观经济学)2005——2010 经济学综合(含宏观经济学、财政学)2006中级财务会计学2008——2010财务会计学2007财务会计与财务管理2003——2004管理学综合(含管理学原理、财务会计学)2005(西方经济学2001——2003经济学2000——2001经济学原理2003——2006,2008——2010统计学院经济学综合(含微观经济学、宏观经济学)2005——2010 经济学综合(含宏观经济学、财政学)2006统计学2001,2003——2005,2008——2010西方经济学2001——2003经济学2000——2001经济学原理2003——2006,2008——2010高等代数2002——2010数学分析1999——2010数据结构2002——2004,2006,2008数据结构与PASCAL 2000——2001计算机组成与体系结构2006,2008计算机组成原理2001管理学与管理系统工程2001管理学原理(管理科学与工程、工商管理专业)2002——2006,2008——2010法学院专业综合一(含民法、刑法)2005——2010专业综合二(含法理学、宪法学)2005——2010综合考试(宪法学与行政法学专业)2004综合考试(国际法学专业)2004综合考试(法学理论专业)2004综合考试(刑法学、经济法学、环境与资源保护法学专业)2004 法学理论2004法学综合考试(民商法学专业)2003法学综合考试(刑法学、经济法学专业)2003国际经济法2004经济法学2003——2004民法学2002,2004民商法2003商法学2002宪法2004刑法学2002——2004中国环境法2004政治与公共管理学院政治学原理2006,2008,2010西方政治思想2008管理学原理(公共管理专业)2006——2010公共行政学2005——2010行政管理学2004政府经济学2004综合考试(行政管理专业)2004物理与微电子科学学院量子力学2004——2005,2008——2010普通物理2004——2005,2008——2010电子技术基础1999——2000,2002——2006,2008——2010 电子技术基础(818物)2010物理化学(理)2000——2010物理化学(工)2000 2009 2010有机化学(理)2000——2010材料科学基础2006,2008——2010材料物理化学2008半导体物理2008细胞生物学2004——2005,2007——2008生物化学2004——2005,2007——2009教育学专业基础综合(全国统)2007——2009 教育科学研究院教育学专业基础综合(全国统)2007——2009 管理学原理(教育经济与管理专业)2004管理学原理(公共管理专业)2006——2010 教育技术概论2004——2005教育学2003——2008体育学院体育学基础综合2008运动训练学2006中国语言文学学院语言学概论与写作2007——2010现代汉语2007——2010文学理论与写作2006,2008中外文学史2006,2008中国古代文学史2005中国现当代文学史2005专业基础综合(中国古代文学专业)2004——2005比较文学与外国文学2005外国语学院二外日语2002——2010二外法语2001,2003——2004,2008——2010二外德语2001,2004,2008——2010二外俄语2008基础英语(含词汇、语法、阅读、写作)2001——2010英语语言文学专业基础(含英语语言学基础、英美文学基础知识、英语国家概况、英汉互译)2007——2010专业基础综合课2004——2005专业英语2002——2003,2006语言学基础(语言学基础知识)2004——2010二外英语2000,2008基础日语2008日本语言文学专业基础2008小论文(日)2000读解与日汉互译2000新闻与传播学院新闻传播史论2004——2005,2008——2010新闻传播实务2004——2005,2008——2010大众传播理论(B)2005传播学理论2007A设计艺术学院设计艺术史论2008——2010专业设计2008——2010设计史及其理论2003——2006设计基础2006(2006有评分标准)产品设计基础2003——2005环境艺术表现技法2003,2005——2006建筑史1997——2006(2006有答案)[注:1997-2001年称“建筑历史”,其中1998年共2页,缺第2页]数学与计量经济学院高等代数2002——2010数学分析1999——2010化学化工学院物理化学(理)2000——2010物理化学(工)20002009高分子化学2008有机化学(理)2000——2010有机化学(药)2008——2010药学生化2008无机化学2001无机化学(工)2000无机化学(理)2000分析化学(含仪分)2000——2001化工原理2000——2001材料物理化学2008生命科学与技术研究院细胞生物学2004——2005,2007——2010 生物化学2004——2005,2007——2010 物理化学(理)2000——2009物理化学(工)20002009有机化学(理)2000——2010无机化学2001无机化学(工)2000无机化学(理)2000分析化学(含仪分)2000——2001化工原理2000——2001材料物理化学2008环境科学与工程学院环工原理2001,2004——2008环境毒理学2004——2008环境工程微生物学2001——2008环境毒理学与工程微生物学2009环境化学2001——2003,2005大气污染控制工程2001水污染控制工程2001力学与航空航天学院材料力学2002——2010结构力学1997——2011流体力学1999——2010机械原理1999——2006,2008——2010水分析化学与微生物学2008机械控制工程基础2001——2003控制工程基础2005机械与汽车工程学院机械原理1999——2006,2008——2010机械控制工程基础2001——2003控制工程基础2005(复试试题)微机原理及应用2003——2010微机原理(机械电子工程)2000——2001电路1999——2009电子技术基础1999——2000,2002——2006,2008——2010数据结构2002——2004,2006,2008数据结构与PASCAL 2000——2001计算机组成与体系结构2006,2008计算机组成原理2001自动控制原理1998——2000结构力学1997——2010流体力学1999——2010高等代数2002——2009数学分析1999——2009材料力学2002——2009工程热力学2008——2010水分析化学与微生物学2008电气与信息工程学院微机原理及应用2003——2010微机原理(机械电子工程)2000——2001电路1999——2011信号与系统2000,2002——2003,2006——2009电子技术基础1999——2000,2002——2006,2008——2010 电子技术基础2010(物)自动控制原理1998——2000智能仪器2008通信专业综合课2004——2005材料科学与工程学院结构力学1997——2010流体力学1999——2010材料力学2002——2010材料科学基础2006,2008——2009材料物理化学2008环境工程微生物学2001——2008)水分析化学与微生物学2008机械原理1999——2006,2008——2010机械控制工程基础2001——2003控制工程基础2005(复试试题)物理化学(理)2000——2011物理化学(工)20002009计算机与通信学院信号与系统2000,2002——2003,2006——2010 电路1999——2011数字电路与逻辑设计2008——2010半导体物理2008微机原理及应用2003——2010微机原理(机械电子工程)2000——2001电子技术基础1999——2000,2002——2006,2008——2010电子技术基础2010(物)数据结构2002——2004,2006,2008数据结构与PASCAL 2000——2001计算机组成与体系结构2006,2008计算机组成原理2001操作系统2001离散数学2001计算机专业综合课(含C语言、数据结构、离散数学、计算机组成原理)2004——2005通信专业综合课2004——2005高等代数2002——2010数学分析1999——2010软件学院数据结构2002——2004,2006,2008数据结构与PASCAL 2000——2001软件工程2008半导体物理2008计算机组成与体系结构2006,2008计算机组成原理2001操作系统2001计算机专业综合课2004——2005数字电路与逻辑设计2008——2009离散数学2001高等代数2002——2009数学分析1999——2009)信号与系统2000,2002——2003,2006——2009微机原理及应用2003——2009微机原理(机械电子工程)2000——2001电路1999——2009电子技术基础1999——2000,2002——2006,2008——2009电子技术基础2010(物)建筑学院建筑设计1998——2002,2005——2008,2010建筑学基础2010建筑构造1997——2004建筑知识综合(建筑历史与建筑构造)2005——2006,2008建筑史1997——2006(2006有答案)[注:1997-2001年称“建筑历史”,其中1998年共2页,缺第2页]土木工程学院结构力学1997——2010水分析化学与微生物学2008流体力学1999——2010(交通工程学2008——2010混凝土结构2003——2005桥梁工程2003——2005工商管理学院管理学原理(管理科学与工程、工商管理专业)2002——2006,2008——2010管理学与管理系统工程2001经营管理与市场营销2003经营决策和市场营销2001运筹学与统计学2000——2001生物医学工程中心微机原理及应用2003——2010微机原理(机械电子工程)2000——2001材料力学2002——2010细胞生物学2004——2005,2007——2008,2010生物化学2004——2005,2007——2010信号与系统2000,2002——2003,2006——2010数据结构2002——2004,2006,2008 数据结构与PASCAL 2000——2001计算机组成与体系结构2006,2008计算机组成原理2001操作系统2001计算机专业综合课2004——2005高等代数2002——2010数学分析1999——2010物理化学(理)2000——2010物理化学(工)20002009有机化学(理)2000——2010材料物理化学2008高分子化学2008。
高国燊《自动控制原理》(第4版)名校考研真题(第1~4章)【圣才出品】

高国燊《自动控制原理》(第4版)名校考研真题第1章绪论一、选择题1.线性系统的主要特点有()。
[华中科技大学2009年研]A.稳定性B.振荡性C.收敛性D.齐次性【答案】D2.对控制作用进行适当的补偿(复合控制),可使系统()。
[湖南大学2006年研] A.由不稳定变成稳定B.减小非线性的影响;C.提高无差度D.同时改善快速性和抗干扰能力【答案】D3.在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了()。
[杭州电子科技大学2008年研]A.开环传递函数B.反馈通道C.前向通道D.闭环传递函数【答案】C二、填空题1.自动控制系统按给定信号的类型可分为______系统和______系统。
[燕山大学研]【答案】连续系统;离散系统2.自动控制系统性能好坏的三个方面为:______。
[燕山大学研]【答案】稳定性,快速性,准确性。
3.自动控制系统对输入信号的响应,一般都包含两个分量,即一个是______,另一个是______分量。
[华南理工大学2006年研]【答案】稳态;瞬态4.最常用的补偿方法是______和______。
[湖南大学2006年研]【答案】按扰动补偿;按输入补偿三、问答题1.何谓自动控制?开环控制和闭环控制各具有什么样的特点?[华南理工大学研]答:(1)自动控制:在无人直接参与下,利用控制装置操纵被控对象,使被控量等于给定量。
(2)开环控制特点:开环控制是按给定值控制,控制方式比较简单,但控制精度受到原理上的限制。
(3)闭环控制特点:闭环控制为偏差控制,可以使反馈回路中的干扰信号得到抑制,因而控制精度较高,但闭环控制有可能使系统不稳定。
2.在经典控制理论中,负反馈控制是一种最基本的控制方式,也是一种常用的校正方式,试举例论述采用负反馈控制的优点。
[南开大学研]答:负反馈的特点可以从“负”字上得到很好的理解,它主要是通过输入、输出之间的差值作用于控制系统的其他部分。
这个差值就反映了我们要求的输出和实际的输出之间的差别。
自动控制原理试题库20套和答案及解析详解

专业知识整理分享一、填空(每空1分,共18分)1.自动控制系统的数学模型有 、 、 、共4种。
2.连续控制系统稳定的充分必要条件是 。
离散控制系统稳定的充分必要条件是 。
3.某统控制系统的微分方程为:dtt dc )(+0.5C(t)=2r(t)。
则该系统的闭环传递函数 Φ(s)= ;该系统超调σ%= ;调节时间t s (Δ=2%)= 。
4.某单位反馈系统G(s)=)402.0)(21.0()5(1002+++s s s s ,则该系统是 阶 型系统;其开环放大系数K= 。
5.已知自动控制系统L(ω)曲线为:则该系统开环传递函数G(s)= ;ωC = 。
6.相位滞后校正装置又称为 调节器,其校正作用是 。
7.采样器的作用是 ,某离散控制系统)()1()1()(10210T T e Z Z e Z G -----=(单位反馈T=0.1)当输入r(t)=t 时.该系统稳态误差为 。
二求:)()(S R S C (10分)R(s)2.求图示系统输出C(Z)的表达式。
(4分)四.反馈校正系统如图所示(12分)求:(1)K f=0时,系统的ξ,ωn和在单位斜坡输入下的稳态误差e ss.(2)若使系统ξ=0.707,k f应取何值?单位斜坡输入下e ss.=?专业知识整理分享五.已知某系统L(ω)曲线,(12分)(1)写出系统开环传递函数G(s)(2)求其相位裕度γ(3)欲使该系统成为三阶最佳系统.求其K=?,γmax=?六、已知控制系统开环频率特性曲线如图示。
P为开环右极点个数。
г为积分环节个数。
判别系统闭环后的稳定性。
(1)(2)(3)专业知识整理分享七、已知控制系统的传递函数为)1005.0)(105.0(10)(0++=s s s G 将其教正为二阶最佳系统,求校正装置的传递函数G 0(S )。
(12分)一.填空题。
(10分)1.传递函数分母多项式的根,称为系统的2. 微分环节的传递函数为3.并联方框图的等效传递函数等于各并联传递函数之4.单位冲击函数信号的拉氏变换式5.系统开环传递函数中有一个积分环节则该系统为 型系统。
自动控制原理试卷C湖南大学课程考试试卷7套
(答题请做在答卷纸上,并写清题号。
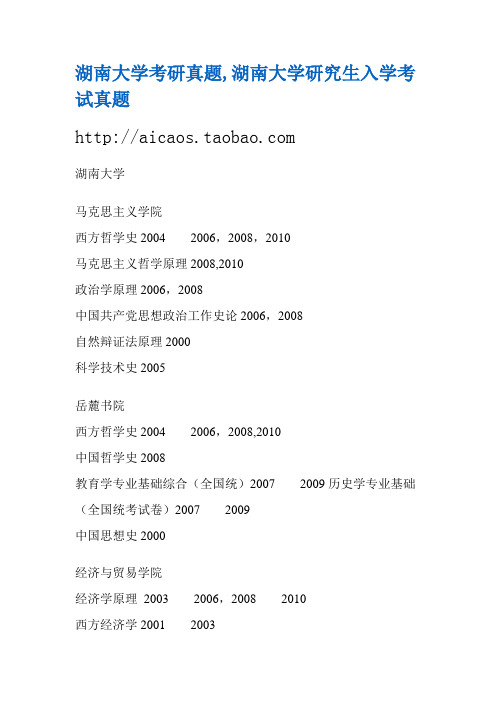
做在草稿纸上的无效)一、已知系统结构图如下图所示。
1、试通过结构图等效变换求C(S)/R(S);2、试画出相应的信号流图,并运用梅逊增益公式求E(S)/R(S)。
二、已知单位负反馈系统的开环传递函数为:)1(10)(+=s s s G1. 画出系统的近似对数幅频、相频特性曲线;2. 判断闭环系统的稳定性。
如果系统稳定,求系统的相角裕度γ和幅值裕度h 。
第1页 共 2 页考试中心填写: ___年___月___日 考 试 用湖南大学课程考试试卷课程名称: 自动控制原理; 试卷编号: ; 考试时间:120分钟题 号 一 二 三 四 五 六 七 八 九 十 总 分应得分 100实得分 评分:评卷人姓名: 学号: 专业班级:装订线(答题不得超过此线)G 1(S) G 2 (S) G 3 (S) H 1(S)G 4(S)R(S) C(S) _ ·· E(S)_三、一线性连续控制系统如下图所示。
1、用劳斯判据判断K 为何值时,系统稳定;2、当K为何值时,系统发生持续等幅振荡,求其振荡角频率ωn 。
一四、已知控制系统开环传递函数为G(S)H(S)= )3)(6(++s s k1、绘制当K 从0→∞变化时系统的根轨迹;2、求闭环系统稳定的K 值范围。
五、离散系统如下图所示。
1、设G 1(S)=s e Ts --1,G 2(S)= )1(10+s s ,样周期T=1s ,试写出闭环脉冲传递函数Φ(Z );2、在z 域中分析系统的稳定性;3、求 r(t)=1(t)+t 时系统的稳态误差。
六、最小相角系统的近似对数幅频特性曲线如图所示,试确定系统的开环传递函数。
R(S) C(S) 2)10(++s s k 220ss + G 1 (S) G 2 (S)考试中心填写年月日第2页共 2 页湖南大学课程考试试卷考试用课程名称:自动控制原理;试卷编号:C;考试时间:120分钟题号 一 二 三 四 五 六 七 八 九 十 总分 应得分 15 10 20 15 24 16 100 实得分 评分评卷人一.绘制如图1所示无源网络的结构图,并求系统的传递函数U c (S)/U r (s)。
《-自动控制原理-》典型考试试题精品文档5页
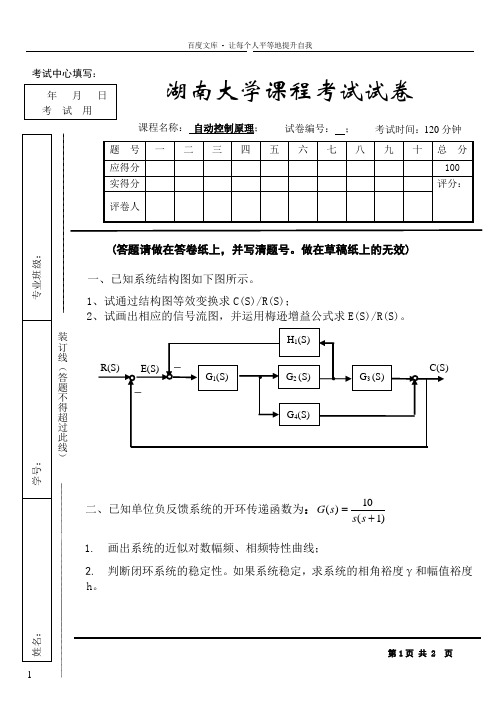
《 自动控制原理 》典型考试试题(时间120分钟)院/系 专业 姓名 学号第二章:主要是化简系统结构图求系统的传递函数,可以用化简,也可以用梅逊公式来求一、(共15分)已知系统的结构图如图所示。
请写出系统在输入r(t)和扰动n(t)同时作用下的输出C(s)的表达式。
二 、(共15分)已知系统的结构图如图所示。
试求传递函数)()(s R s C ,)()(s N s C 。
三、(共15分)已知系统的结构图如图所示。
试确定系统的闭环传递函数C(s)/R(s)。
四、(共15分)系统结构图如图所示,求X(s)的表达式五、(共15分)已知系统的结构图如图所示。
试确定系统的闭环传递函数C(s)/R(s)和C(s)/D(s)。
六、(共15分)系统的结构图如图所示,试求该系统的闭环传递函数)()(s R s C 。
七、(15分)试用结构图等效化简求题图所示各系统的传递函数)()(s R s C 一、(共15分)某控制系统的方框图如图所示,欲保证阻尼比ξ=0.7和响应单位斜坡函数的稳态误差为ss e =0.25,试确定系统参数K 、τ。
二、(共10分)设图(a )所示系统的单位阶跃响应如图(b )所示。
试确定系统参数,1K 2K 和a 。
三、(共15分)已知系统结构图如下所示。
求系统在输入r(t)=t 和扰动信号d(t)=1(t)作用下的稳态误差和稳态输出)(∞C四、(共10分)已知单位负反馈系统的开环传递函数为:试确定引起闭环系统等幅振荡时的K 值和相应的振荡频率ω五、(15分)设单位反馈系统的开环传递函数为若系统以2rad/s 频率持续振荡,试确定相应的K 和α值六、(共15分)系统结构图如图所示。
(1)为确保系统稳定,如何取K 值?(2)为使系统特征根全部位于s 平面1-=s 的左侧,K 应取何值?(3)若22)(+=t t r 时,要求系统稳态误差25.0≤ss e ,K 应取何值?六、(15分)单位反馈系统的开环传递函数为)5)(3()(++=s s s K s G 为使系统特征根的实部不大于-1,试确定开环增益的取值范围。
(完整版)自动控制原理试题及答案,推荐文档

自动控制原理:参考答案及评分标准一、单项选择题(每小题1分,共20分)1. 系统和输入已知,求输出并对动态特性进行研究,称为(C)A. 系统综合B.系统辨识C.系统分析D.系统设计2. 惯性环节和积分环节的频率特性在(A )上相等。
A. 幅频特性的斜率B.最小幅值C.相位变化率D.穿越频率3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为(C)A.比较元件B.给定元件C.反馈元件D.放大元件4. 3从0变化到时,延迟环节频率特性极坐标图为(A )A.圆B.半圆C椭圆 D.双曲线5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个(B )A.比例环节B.微分环节C.积分环节D.惯性环节6.若系统的开环传递函数为10s(5s 2)则它的开环增益为(A.1B.2C.5D.107.二阶系统的传递函数G(s)5~2s 2s 5则该系统是(A.临界阻尼系统B.欠阻尼系统8. 若保持二阶系统的Z不变,提咼3n,A.提高上升时间和峰值时间C.提高上升时间和调整时间9. 一阶微分环节G(s) 1 Ts,当频率A. 45 °B.-45°10. 最小相位系统的开环增益越大,其(A.振荡次数越多C. 过阻尼系统D.零阻尼系统则可以(B )B. 减少上升时间和峰值时间D. 减少上升时间和超调量卡时,则相频特性G(j )为(A )C. 90 °D.- 90°D )B. 稳定裕量越大D. 稳态误差越小11设系统的特征方程为D s s4 8s3217s 16s 50,则此系统(A )A.稳定B.临界稳定C.不稳定D.稳定性不确定。
12某单位反馈系统的开环传递函数为: G ss(s 1)(s 5),当k= ( C )时,闭环系统临界稳定。
B.20 C.30 D.4013.设系统的特征方程为Ds 3s310s 5s2s 2 0,则此系统中包含正实部特征的个数有(C )A.0B.1C.2D.316.稳态误差e ss 与误差信号E (s )的函数关系为(B )A.(-3,x )B.(0宀)C.(- x ,-3)D.(-3,0)20.在直流电动机调速系统中,霍尔传感器是用作( B )反馈的传感器。
自动控制原理选择题有答案解析.docx

自动控制原理选择题(48学时)1.开环控制方式是按(A)偏差;给定量(C)给定量;扰动2 .自动控制系统的(A)稳定性(C)稳态特性3 .系统的微分方程为(A)离散系统(C)线性时变系统4 .系统的微分方程为(A)离散系统(C)线性时变系统5.系统的微分方程为(A)离散系统(C)线性时变系统6 .系统的微分方程为(A)离散系统(C)线性时变系统7 .系统的微分方程为进行控制的,反馈控制方式是按(B)给定量;偏差(D)扰动;给定量是系统正常工作的先决条件。
(B)动态特性(D)精确度c(t) =5 r2(t) t d--T-(^dt,则系统属于(B)线性定常系统(D)非线性系统进行控制的。
牌3嘤6峻8c(t) = r(t)dt dt dt ,则系统属于(B)线性定常系统(D)非线性系统t 虫① c(t) = r(t) 3如dt dt,则系统属于(B)线性定常系统(D)非线性系统c(t) =r(t)cos∙∙t 5,则系统属于(B)线性定常系统(D)非线性系统dr(t) tczV5"d,则系统属于(A )离散系统(B )线性定常系统(C )线性时变系统(D )非线性系统(B) 线性定常系统(B) e"t ,te^t (C) e"t sint12.时域中常用的数学模型不包括13 •适合于应用传递函数描述的系统是14 •传递函数的零初始条件是指 t 0时系统的&系统的微分方程为c(t)=『(t),则系统属于(A )微分方程 (B) 差分方程 (C )传递函数(D) 状态方程(A )离散系统(C) 线性时变系统(D) 非线性系统9.设某系统的传递函数为:G(S)普 I 18 R(S)s 2 2s 1,则单位阶跃响应的模态有:Z A X -L_2t(A ) e , e(B)e"t ,te^t (C) e"t si nt(D )e^t ,te°t 10.设某系统的传递函数为:G(S)C(S)26s *18,则单位阶跃响应的模态有:R(S) s 2 2s 2Z、 -LJ2t(A ) e ,e(B) e"t ,te^t (C) e"t sint(D) e"t ,te't11.设某系统的传递函数为:G(S)C(S) 6s 18 R(S) s 2 3s 2,则单位阶跃响应的模态有:(A ) e^t ,e^t(D)(A)线性定常系统 (B) 线性时变系统 (C) 非线性时变系统(D) 非线性定常系统(A)输入为零(B)输入、输出及各阶导数为零(C)输入、输出为零15 •传递函数的拉氏反变换是(A) 单位阶跃响应(C)单位斜坡响应16.系统自由运动的模态由(A)零点(C)零点和极点17 •信号流图中,_____ 的支路称为源节点。
考研自动控制原理习题集及其解答

自动控制原理习题及其解答第一章(略) 第二章例2-1 弹簧,阻尼器串并联系统如图2-1示,系统为无质量模型,试建立系统的运动方程。
解:(1) 设输入为y r ,输出为y 0。
弹簧与阻尼器并联平行移动。
(2) 列写原始方程式,由于无质量按受力平衡方程,各处任何时刻,均满足∑=0F ,则对于A 点有021=-+K K f F F F其中,F f 为阻尼摩擦力,F K 1,F K 2为弹性恢复力。
(3) 写中间变量关系式220110)()(y K F Y Y K F dty y d f F K r K r f =-=-⋅=(4) 消中间变量得 020110y K y K y K dtdy f dt dy f r r=-+- (5) 化标准形 r r Ky dtdyT y dt dy T +=+00 其中:215K K T +=为时间常数,单位[秒]。
211K K K K +=为传递函数,无量纲。
例2-2 已知单摆系统的运动如图2-2示。
(1) 写出运动方程式 (2) 求取线性化方程 解:(1)设输入外作用力为零,输出为摆角θ ,摆球质量为m 。
(2)由牛顿定律写原始方程。
h mg dtd l m --=θθsin )(22其中,l 为摆长,l θ 为运动弧长,h 为空气阻力。
(3)写中间变量关系式)(dtd lh θα= 式中,α为空气阻力系数dtd l θ为运动线速度。
(4)消中间变量得运动方程式0s i n 22=++θθθmg dt d al dtd ml (2-1)此方程为二阶非线性齐次方程。
(5)线性化由前可知,在θ =0的附近,非线性函数sin θ ≈θ ,故代入式(2-1)可得线性化方程为022=++θθθmg dt d al dtd ml 例2-3 已知机械旋转系统如图2-3所示,试列出系统运动方程。
解:(1)设输入量作用力矩M f ,输出为旋转角速度ω 。
(2)列写运动方程式f M f dtd J+-=ωω式中, f ω为阻尼力矩,其大小与转速成正比。
湖南大学自动控制原理试卷10
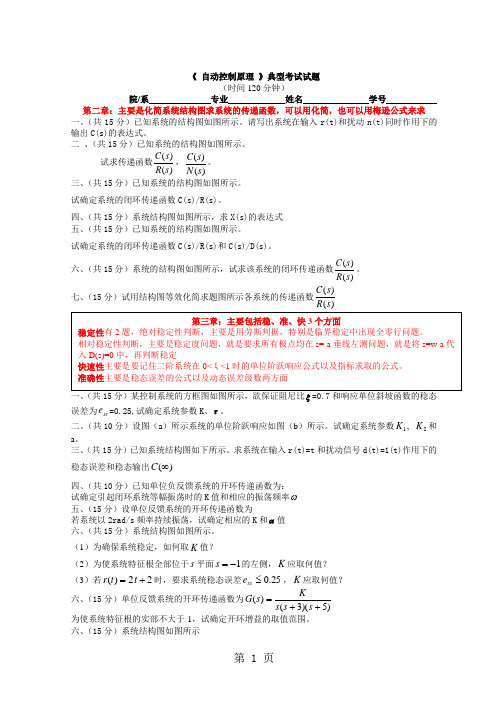
( 注意:请将所有答案写在答题纸上,答案要求有详细的计算过程 )一、 写出下图所示系统的传递函数()()C s R s (结构图化简,梅逊公式均可)。
(10分)二、 已知典型二阶系统的单位阶跃响应曲线如图所示。
试求:(15分)(1)开环传递函数。
(2)单位斜坡函数输入时的稳态误差。
三、 设某控制系统方框图如图所示,试绘制K 变化时系统特征方程的根轨,当要求闭环系统的特征值全部位于s =-1垂线之左,试确定参数K 的取值范围。
(15分)考试中心填写: 2014 年_ 月_ 日湖南大学课程考试试卷(开卷)课程名称: 自动控制原理 ; 试卷编号: A ; 考试时间:120分钟 题 号 一 二 三 四 五 六 七 八 九 十 总 分 应得分 10 15 15 15 20 15 10 100 实得分 评分:评卷人姓名: 学号: 专业班级:装订线(答题不得超过此线)四、 已知负系统的开环传递函数为 001(),()kG s k T s Ts =>>+(15分)1)试绘制系统的概略开环幅相曲线; 2)用奈氏判据判断闭环系统的稳定性。
五、 已知一单位负反馈最小相位系统的开环对数幅频特性I 和串联校正后的开环对数幅频特性II 如图所示:(20分)1)写出系统校正前后的开环传递函数01(),()G s G s ; 2)写出校正装置的传递函数()c G s 并判断其为何种校正; 3)画出校正前后系统开环传函在对数坐标下的相频曲线; 4)分析该校正装置对系统动态性能的影响。
六、 已知某离散系统如下图所示,采样周期T=1s ,传递函数为1)(1+=S KS G试分析系统的稳定性,并确定K 值的稳定范围。
(15分)七、 已知单位负反馈系统的开环传递函数为:)110()5(++S S S K (10分)1)、画出K=10时系统的近似对数幅频、相频特性曲线(伯德图);2)、用对数频率稳定判据判断K=10时闭环系统的稳定性。
高国燊《自动控制原理》(第4版)(名校考研真题 绪 论)
第1章 绪 论一、选择题1.线性系统的主要特点有()。
[华中科技大学2009年研]A.稳定性B.振荡性C.收敛性D.齐次性【答案】D2.对控制作用进行适当的补偿(复合控制),可使系统()。
[湖南大学2006年研]A.由不稳定变成稳定B.减小非线性的影响;C.提高无差度D.同时改善快速性和抗干扰能力【答案】D3.在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了()。
[杭州电子科技大学2008年研]A.开环传递函数B.反馈通道C.前向通道D.闭环传递函数【答案】C二、填空题1.自动控制系统按给定信号的类型可分为______系统和______系统。
[燕山大学研]【答案】连续系统;离散系统2.自动控制系统性能好坏的三个方面为:______。
[燕山大学研]【答案】稳定性,快速性,准确性。
3.自动控制系统对输入信号的响应,一般都包含两个分量,即一个是______,另一个是______分量。
[华南理工大学2006年研]【答案】稳态;瞬态4.最常用的补偿方法是______和______。
[湖南大学2006年研]【答案】按扰动补偿;按输入补偿三、问答题1.何谓自动控制?开环控制和闭环控制各具有什么样的特点?[华南理工大学研]答:(1)自动控制:在无人直接参与下,利用控制装置操纵被控对象,使被控量等于给定量。
(2)开环控制特点:开环控制是按给定值控制,控制方式比较简单,但控制精度受到原理上的限制。
(3)闭环控制特点:闭环控制为偏差控制,可以使反馈回路中的干扰信号得到抑制,因而控制精度较高,但闭环控制有可能使系统不稳定。
2.在经典控制理论中,负反馈控制是一种最基本的控制方式,也是一种常用的校正方式,试举例论述采用负反馈控制的优点。
[南开大学研]答:负反馈的特点可以从“负”字上得到很好的理解,它主要是通过输入、输出之间的差值作用于控制系统的其他部分。
这个差值就反映了我们要求的输出和实际的输出之间的差别。
控制器的控制策略是不停减小这个差值,以使差值变小。
湖南大学自动控制原理试题

大
学
教
务
处
考
试
中 心
第 6 页共 6 页
姓名:
湖南大学课程考试试卷
课程名称: 自动控制原理 ;试卷编号: 2
;考试时间:120 分钟
湖
南
题 号 一 二 三 四 五 六 七 八 九 十 总分
大
学
应得分 15 12 15 15 16 12 15
100
课
实得分
程
考
评卷人
试
评分:
试 卷
一、试求下图所示控制系统的传递函数 C(s)/R(s)(15 分)
专业班级:
装 订
试计算该系统+在 r(t)和 f(t)同时作H用3(下s) 的稳态误差 ess(t)。 (15 分)
线 (
四、R(已s) 知+ 单E位(s)负反馈系统的开环+传递F(s函) 数如下, (15 分)C(s)
答 案 不
(1)试利用劳斯判据确定系统稳定的 K*值范围 (_2)试绘制系统的概略根+规迹。
得 超
2
过
此 线
第 1 页共 2 页
)
五、已知某最小相位校正网络的开环幅频曲线如下:(16 分) (1)根据幅频特性曲线确定系统的开环传递函数。 (2)画出该系统相频特性曲线。指明该校正装置的类型和特点。 六、已知系统的开环传递函数如下(K > 0):(12 分) (1)试绘制系统的概略开环幅相曲线。 (2)利用奈氏判据确定系统闭环稳定的条件。 七、已知系统如下图所示,采样周期 T=1s, 输入 r(t)=1(t) 。(15 分) 试求: (1)采样瞬时的输出响应 c*(t); (2)输出响应的终值 c( )
R二计(s)、算+已系知统系的统超G1(框调s) 图量如δ+ 下℅,,如峰G果值2(要时s) 求间系+tp。统(_阻12尼G分3比(s))为ξH4(=s)G04.(7s)07,求反馈系数τ的值,
自动控制原理试题库20套和答案详细讲解

自动控制原理试题库20套和答案详细讲解word 格式文档一、填空(每空 1 分,共 18 分)1.自动控制系统的数学模型有、、、共 4种。
2.连续控制系统稳定的充分必要条件是。
离散控制系统稳定的充分必要条件是。
dc(t )3.某统控制系统的微分方程为:+0.5C(t)=2r(t) 。
则该系统的闭环传递函数dtΦ(s)= ;该系统超调σ %= ;调节时间 ts( =2%)= 。
4.某单位反馈系统G(s)=100(s 5)阶(0.1s,则该系统是s22)(0.02s 4)型系统;其开环放大系数K= 。
5.已知自动控制系统L(ω)曲线为:L( ω)dB40 [-20]则该系统开环传递函数G(s)= ;ωCω0.1ωC = 。
6.相位滞后校正装置又称为调节器,其校正作用是。
7 .采样器的作用是,某离散控制系统(1e 10T )(单位反馈T=0.1 )当输入r(t)=t 时.该系统稳态误差G(Z)2 (Ze 10T(Z 1) )为。
二 . 1. 求图示控制系统的传递函数 .G4+R(s) G1 G2 G3 C(s )-- -G5G6求:C(S)(10 分)R(S)专业整理2.求图示系统输出C ( Z)的表达式。
( 4 分)R( s)TG1 G2 G3 C(s)-TH1 H2四.反馈校正系统如图所示(12 分)求:( 1) Kf=0 时,系统的ξ,ω n 和在单位斜坡输入下的稳态误差 e ss.(2)若使系统ξ =0.707 ,k f应取何值?单位斜坡输入下e ss.= ?R(s) 8 c(s)S(S 2)k f s专业整理五.已知某系统 L(ω)曲线,(12 分)(1)写出系统开环传递函数 G ( s)(2)求其相位裕度γ( 3)欲使该系统成为三阶最佳系统.求其 K=?,γ=?maxL(ω)[-20]100ω10 25 ωc[-40]六、已知控制系统开环频率特性曲线如图示。
P 为开环右极点个数。
г为积分环节个数。
湖南大学历年考研真题信息
建筑院 建筑学基础:03---14 建筑设计:04--14 城市规划基础:12--14,答案 12--13. 城市规划设计:07--14。
数学院
数学分析:03--14,答案 06-07,09-12 高等代数:03--14,答案 06-07,09-12(12 年答案少一页) 教育综合:11--14
化工院 有机化学(理):03-14,答案 03-14 物理化学(理):03-14,答案 03-14 物理化学(工一):03-14,答案 03-14 有机化学(药):11-14 物理化学(工二):14 药物合成:11-14 药学生化:09-14
外院 基础英语:03-14,答案 03-13
语言学基础:04-14,答案 07 英语语言文学专业基础:04-14,答案 04-14 2 外日语:02-14,答案 05,07 2 外法语:03-14,答案 03-09 2 外德语:04,08-14 年(无答案) 基础日语:06-14,答案 07 日语语言文学专业基础:06-14(无答案) 2 外英语:04-14,答案 05,07 英语语言文学专业基础二:10-14(无答案) 教育综合:11-14(无答案) 翻译硕士英语:10-14,答案 10-14 英语翻译基础:10-14,答案 10-14 百科:10-14,答案 10-14
物电院 计算机应用基础:13--14 现代教育技术:10--14 普通物理:04--14(少 06) 量子力学;04--14(少 06) 数字与模拟电子技术:14,电子技术 03--13 电磁场与电磁波:14 教育综合:11--14 普通物理二:11--14 现代教育技术二:13
艺术院 设计艺术史论:03--14 专业设计 A:07--14 工业设计工程:11--14 艺术基础:10--14
湖南大学考研题试卷 自动控制原理08年

Tz z z 1 1 1 ; Z ; Z 2 。四. (20 Z aT 2 s a z e s z 1 s ( z 1)
分)单位反馈系统的开环对数幅频特性曲线 L0 ( ) 如图 3 所示,采用串联校正,
s s 1 1 3 10 校正装置的传递函数 G c ( s) s s 1 1 0 . 3 100
(1) 写出校正前系统的传递函数 G0 ( s ) ; (2) 在图 3 中绘制校正后系统的对数幅频特性曲线 L( ) ; (3) 求校正后系统的截止频率 c 和相角裕度 。
五. (30 分)非线性系统结构图如图 4 所示, M 1 , N ( A)
4M 。 A
(1) 0 时,确定系统受扰后最终的运动形式(稳定/自振/发散) ; (2) 0 时,要在系统输出端产生一个振幅 Ac 1 的近似正弦信号,试确定参 数 K 和相应的频率 ; (3) 定性分析当延迟环节系数 增大时,自振参数( A, )变化的趋势(增加/ 不变/减小) 。
自动控制原理试题(卷)
重要提示:考生必须将所有答案写在答题纸上,本试题上的任何标记均不作判题依据
一. (20 分)系统结构图如图 1 所示 (1) 写出闭环传递函数 ( s ) 表达式; (2) 要使系统满足条件: 0.707 , n 2 , 试确定相应的参数 K 和 ; (3) 求此时系统的动态性能指标(
0 0
, ts ) ;
(4) r (t ) 2t 时,求系统的稳态误差 ess ; (5) 确定 Gn ( s ) ,使干扰 n(t ) 对系统输出 c(t ) 无影响。 K* s ( s 3) 2
二. (15 分)单位反馈系统的开环传递函数为 G ( s )
自动控制原理王雪松答案
自动控制原理王雪松答案一、单选题1线性系统的主要特点有()。
[华中科技大学2009年研]A.稳定性B.振荡性C.收敛性D.齐次性【答案】D查看答案【解析】线性系统的重要性质是可以应用叠加原理,叠加原理有两重含义,既具有可叠加性和齐次性。
2对控制作用进行适当的补偿(复合控制),可使系统()。
[湖南大学2006年研]A.由不稳定变成稳定B.减小非线性的影响C.提高无差度D.同时改善快速性和抗干扰能力【答案】D查看答案【解析】复合控制只要参数选择合适,不仅可以改善快速性,还能保持系统稳定,减小稳态误差、抑制几乎所有可测量扰动。
3在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了()。
[杭州电子科技大学2008年研]A.开环传递函数B.反馈通道C.前向通道D.闭环传递函数【答案】C查看答案【解析】前向通道是指闭环系统中,从系统输入量到系统被控制量之间的通道。
因此控制器和控制对象就组成了通常闭环控制系统的前向通道。
4系统的传递函数与下列因素有关()。
[华中科技大学2009年研] A.系统结构B.初始条件C.系统结构和参数D.系统结构、参数和初始条件【答案】C查看答案【解析】传递函数是一种用系统参数表示输出量与输入量之间关系的表达式,它只取决于系统或元件的结构和参数,而与输入量的形式无关,也不反映系统内部的任何信息。
5传递函数的概念除了适用于线性定常系统之外,还可用于描述()系统。
[杭州电子科技大学2008年研]A.线性时变B.非线性定常C.非线性时变D.以上都不是【答案】D查看答案【解析】传递函数定义为线性定常系统零初始条件下,系统输出量与输入量的拉氏变换之比,只适用于线性定常系统。
6设f(t)=tet·1(t),则F(s)=()。
[清华大学研]A.-1/(s-1)2B.1/(s-1)C.1/(s-1)2D.1/[s2(s-1)]【答案】C查看答案【解析】由于L(t)=1/s2,由相移定理,F(s)=L(tet·1(t))=1/(s -1)2。
湖南大学考研题 自动控制原理

LG ( )
50db 40db 30db -20
10db 0 0.01 0.1 0.32 1 10
-40 20
-20db
-30db
-60
-40db
L C ( )
图3 1、答案: R ( S ) =
C (S )
G1G2G3 G1G4 1 G1G2G3 G1G4 H1G2 G3 H1G4
G=
K
K=100
33.40
GGc=
(3)
100(3.125S 1) S S S ( 1)( 1)(100 S 1) 10 20
' 57.70
ts 1.4 s
d 2 3 d 1=1 K* 3
2、答案: %=16.3% 3、答案: (1) 4、答案: (1) 5、答案: (1)
a 3
(2)
1 K 3
0 K 15
(2) K=8
(2)
S S S ( 1)( 1) 10 20 3.125S 1 Gc= 100 S 1
(4) 若 r(t) = 2t +2 时,要求系统的稳态误差为 0.25,问 K 应取何值。 5、 已知最小相位系统的开环对数幅频特性 LG ( ) 和串联校正装置的对数幅频特性 L ( )
C
如图 3 所示: (本题 25 分) (1) 写出原系统的开环传递函数 G(S),并求其相角裕度 ; (2) 写出校正装置的传递函数 G C ( S ) ; (3) 画出校正后系统的开环对数幅频特性 LGC ( ) ,并求其相角裕度 。
(1) 绘制 K 从 0 ~ 变化的根轨迹(要求出:分离点、与虚轴的交点等) ;
*
(2) 求系统稳定且为欠阻尼状态时开环增益 K 的取值范围。
自动控制原理试题库(有答案的)

自动控制原理试题库(有答案的)自动控制理论试卷(a/b卷闭卷)一、填空题(每空1分后,共15分后)1、反馈控制又称偏差控制,其控制作用是通过与反馈量的差值进行的。
2、复合控制存有两种基本形式:即为按的线性网络复合控制和按的线性网络复合控制。
3、两个传递函数分别为g1(s)与g2(s)的环节,以并联方式连接,其等效传递函数为g(s),则g(s)为(用g1(s)与g2(s)表示)。
4、典型二阶系统极点原产例如图1右图,则并无阻尼自然频率?n?,阻尼比??,该系统的特征方程为,该系统的单位阶跃响应曲线为。
5、若某系统的单位脉冲响应为g(t)?10e?0.2t?5e?0.5t,则该系统的传递函数g(s)为。
6、根轨迹起始于,终止于。
7、设某最小相位系统的相频特性为?(?)?tg?1(??)?900?tg?1(t?),则该系统的开环传递函数为。
8、pi控制器的输出-输入关系的时域表达式就是,其适当的传递函数为,由于分数环节的导入,可以提升系统的性能。
二、选择题(每题2分,共20分)1、使用负反馈形式相连接后,则()a、一定能使闭环系统稳定;b、系统动态性能一定会提高;c、一定能使干扰引起的误差逐渐减小,最后完全消除;d、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果()。
a、减少开环极点;b、在分数环节另加单位负反馈;c、减少开环零点;d、导入串联全面性校正装置。
3、系统特征方程为d(s)?s3?2s2?3s?6?0,则系统()1a、平衡;b、单位阶跃积极响应曲线为单调指数下降;c、临界平衡;d、右半平面闭环极点数z?2。
4、系统在r(t)?t2促进作用下的稳态误差ess??,表明()a、型别v?2;b、系统不稳定;c、输出幅值过小;d、闭环传递函数中存有一个分数环节。
5、对于以下情况应绘制0°根轨迹的是()a、主意见反馈口符号为“-”;b、除kr外的其他参数变化时;c、非单位反馈系统;d、根轨迹方程(标准形式)为g(s)h(s)??1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1) 绘制 K 从 0 ~ 变化的根轨迹(要求出:分离点、与虚轴的交点等) ;
*
(2) 求系统稳定且为欠阻尼状态时开环增益 K 的取值范围。
4.已知单位负反馈系统的开环传递函数为 G ( S ) 分) (3) 使系统稳定的 K 值;
K ,试求: (本题 15 s (0.1s 1)(0.2s 1)
(4) 若 r(t) = 2t +2 时,要求系统的稳态误差为 0.25,问 K 应取何值。 5、 已知最小相位系统的开环对数幅频特性 LG ( ) 和串联校正装置的对数幅频特性 L ( )
C
如图 3 所示: (本题 25 分) (1) 写出原系统的开环传递函数 G(S),并求其相角裕度 ; (2) 写出校正装置的传递函数 G C ( S ) ; (3) 画出校正后系统的开环对数幅频特性 LGC ( ) ,并求其相角裕度 。
1.已知系统结构如图 1 所示,求传递函数 R ( S )
C (S )
G4
R(S)
G1
G2
G3
C(S)
H1
图1
2、系统结构如图 2 所示,试求系统的超调量 % 和调节时间 t s 。 R(S) C(S)
25 s(s 5)
图2
3、某单位反馈系统的开环传递函数为
G (S ) H (S )
K * ( S 1) S ( S-3)
ts 1.4 s
d 2 3 d 1=1 K* 3
2、答案: %=16.3% 3、答案: (1) 4、答案: (1) 5、答案: (1)
a 3
(2)
1 K 3
0 K 15
(2) K=8
(2)
S S S ( 1)( 1) 10 20 3.125S 1 Gc= 100 S 1
LG ( )
50db 40db 30db -20
10db 0 0.01 0.1 0.32 1 10
-40 20
Байду номын сангаас
-20db
-30db
-60
-40db
L C ( )
图3 1、答案: R ( S ) =
C (S )
G1G2G3 G1G4 1 G1G2G3 G1G4 H1G2 G3 H1G4
G=
K
K=100
33.40
GGc=
(3)
100(3.125S 1) S S S ( 1)( 1)(100 S 1) 10 20
' 57.70