OMRON 变址寄存器使用详解
PLC欧姆龙的基本操作指令及常用程序设计

PLC欧姆龙的基本操作指令及常用程序设计PLC(Programmable Logic Controller),中文名可编程控制器,是一种以微处理器为核心,可存储程序控制、逻辑操作、序列控制和定时控制等运算的工业数字控制器。
PLC广泛应用于工厂、机器设备、输配电自动化等各种领域的自动化控制中。
PLC的操作指令又称为PLC的指令集,是PLC软件编程的基本元素。
欧姆龙是PLC市场上的知名品牌,今天我们将介绍欧姆龙PLC的基本操作指令及常用程序设计。
指令集介绍欧姆龙PLC的指令集分为以下几个部分:I/O控制指令I/O控制指令是最基本的指令,主要用于PLC的输入和输出信号的处理。
指令名功能描述IN 读取输入信号OUT 输出控制信号SET 置位指定位RST 复位指定位NOT 取反指定位运算控制指令运算控制指令包含各种运算符和运算指令,可进行基本运算和逻辑运算,包括加减乘除、与或非等运算。
指令名功能描述ADD 两数相加SUB 两数相减MUL 两数相乘DIV 两数相除MOD 两数取模AND 两数按位与OR 两数按位或XOR 两数按位异或NOT 操作数取反计数器控制指令计数器控制指令主要用于制作计算某个量的计数器程序,通常包括计数器的设置、清除、增加、减少等操作。
指令名功能描述SET 设置计数器CLR 清除计数器INC 计数器递增DEC 计数器递减定时器控制指令定时器控制指令主要用于制作测量时间的的程序,通常包括定时器的设置、清除、开始、停止等操作。
指令名功能描述TIM 开启定时器TOF 定时器到达时间RST 清除定时器移位指令移位指令主要用于实现数据的移位操作,包括左移、右移、循环移位等操作。
指令名功能描述SLW 左移指定位数SRW 右移指定位数ROL 左旋指定位数ROR 右旋指定位数SLO 变量绕环移位SRO 变量绕环移位常用程序设计除了上述指令集外,欧姆龙PLC还支持多种常用程序设计方式。
下面简要介绍常用程序设计方式的概念和使用方法。
欧姆龙CP系列编程手册00010

N 位倍长左移 NASR
二进制双字自 -加
BCD 双字自 --B 加
带符号・无 CY +C BIN 双字加法 运算
无 CY BCD +BC 双字加法运算
带符号・无 CY -C BIN 双字减法 运算
无 CY BCD -BC 双字减法运算
带符号 BIN 双 *U 字乘法运算
BCD 双字乘 法运算
带符号 BIN 双 /U 字除法运算
中断任务执行 禁止
脉冲频率转 CTBL 换
定位
ACC
比较表登录
频率加减速控 制
数字式开关 TKY 7 段显示 IORD
串行端口输 TXDU 入
10 键输入 智能 I/O 读出
串行通信单元
附
串行端口输出
指令发送 EXPLT
Explicit CPU ECHWR 单元数据读 出指令 7 段表示控制
时分秒→秒 HMS 转换
数据平均化
宏
SBN
全局子程序 GRET 进入
上下限限位控 BAND 制
缩放
SCL2
子程序输入 RET 全局子程序回 送
指令名称 字双字逻辑 和 字双字同或
32 位 BIN→ 浮点转换 浮点乘法运 算 COS 运算 TAN-1 运算 乘方运算
32 位 BIN→ 浮点转换< 倍> 浮点乘法运 算<倍> COS 运算< 倍> TAN-1 运算 <倍> 乘方运算< 倍>
IL
003 互锁区域
ILC
004 转移
PWM SNXT SDEC MTR DLNK
协议宏
TXD
串行通信单元 STUP 串行端口输入
网络发送
RECV
Explicit 读出指 ESATR 令
欧姆龙PLC间接寻址的灵活应用

欧姆龙PLC间接寻址的灵活应用在PLC控制系统中,需要经常对连续多个数据进行某项操作,比如产生一系统数据或者一系统数据执行连续运算或比较以及按时间来对数据进行存储等。
在小型PLC中无变址寄存器情况下,以间接寻址的方法将大大减少程序开销的容量,以及提高程序的可读性。
现以欧姆龙PLC来实现以上四项操作,其它系列PLC类似。
(因在执行平方根与除法运算的例程稍显复杂,故只有此例增加地址注释,其它程序段较小,故没有增加注释)。
一:对PLC连续D区产生一组连续的数据。
图1:对D1000开始的地址连续存储1-100的数据程序剖析:先初始化要应用的间接寻址寄存器D600,再选择需要产生的连续数据个数,本例使用FOR指令来连续循环执行操作,使用++B从而产生源数据,再使用MOV指令,将产生的源数据送至D600中指定的地址中去,注意*D600前的*号,同时间接寻址地址D600执行++B操作,为下一个循环指明直接地址作准备。
当循环指定次数&100到达后,将自动跳出FOR循环,将执行NEXT之后的程序。
当下次扫描周期到达时,程序将又从初始化间接寻址开始执行。
图2:监视PLC内的D1000开始地址内的数据数据剖析:进入PLC中的D区值进行监视D1000开始地址中,将会发现D1000至D1099分别存储为1-100的数据。
如果需要修改初始值时,可以在初始化时将D601输入相应的值即可,当然如果要产生200个数据,修改FOR后的数据由&100修改为&200即可。
二:对连续通道的数据执行算术运算(寻找执行平方根后为整数的数及寻找被指定数整除的数)。
图3:D5000存储来自于D1000执行的平方根后为整数的数,D4000存储来自于D1000内被3整除的数程序剖析:平方根ROOT指令源数据为32位,然而本次的源数据却是16位数据,同时因ROOT指令对平方根的余数不进行保留,故无法直接得到小数部分,也即无法精准得出执行平方根后是否为整数,故需将底16位置0(间接地将数据乘以#10000),即每次在执行ROOT之前需将底16位使用"MOV #0 *D606"来清零,同时使用MOVD指令来提取出D608中的底8位即就是执行平方根后的小数部分值,当D608为零时表示执行平方根操作后无小数产生,即将源地址中的数据送至新目标地址中去,这样就实现了寻找指定区域内整数平方根的数据。
cj2mPLC硬件介绍及地址分配
OMRON CJ系列PLC(CJ2M)
第一章 硬件介绍 第二章 数据介绍 第三章 地址分配
第一章 硬件介绍
硬件介绍
1、小型机
CPM系列、CP系列
2、大型机
CV系列、CS系列
3、中型机
CJ系列、C200Hα系列、CQM系列
4、本次培训机型
CJ2M是CJ系列CPU中的一款,分为CPU11、12、13、14、15共五种,差 别在于程序容量不用。CJ2M价格实惠、控制功能齐全,以后应用会比较广泛, 所以我们培训CJ2M
可以输出信号类型-10V-10V 、 0V-10V 、 0V-5V、 1V-5V、 4-20Ma ;V型只 能输出电压信号,C型只能输出电流信号
状态指示灯
状态指示灯
单元号
操作模式
硬件介绍
3.7模拟量输出单元 单元号开关:设置单元号开关需要在断电情况下进行
代表十位数 代表十位数
单元号设置范围:0-95, 必须和软件内设置一样, 不然会报错。
状态指示灯
单元号
操作模式
硬件介绍
3.9高速计数单号设置范围:0-92,一个高速计数器单元
被分配了4个单元的字。如果将高速计数器单元
代表十位数
的单元号设置为 “n”,则相邻的特殊 I/O 单元 的单元号号就应设置为“n+4”,以避免存储器
普通模式
普通模式
普通模式
普通模式
调整模式
调整模式
调整模式
普通模式
调整模式
调整模式
调整模式
调整模式
硬件介绍
3.7模拟量输出单元 端子接线图
软件调整输出信号类型
注:带C、V的型号输出类型不能调整
欧姆龙PLC使用步骤
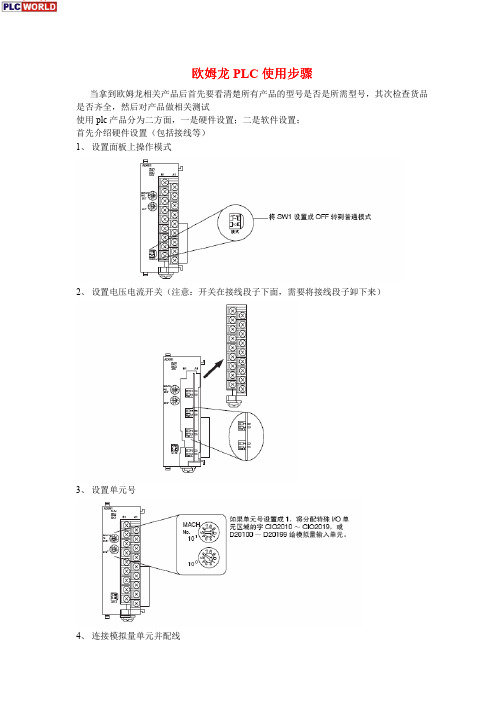
欧姆龙PLC使用步骤
当拿到欧姆龙相关产品后首先要看清楚所有产品的型号是否是所需型号,其次检查货品是否齐全,然后对产品做相关测试
使用plc产品分为二方面,一是硬件设置;二是软件设置;
首先介绍硬件设置(包括接线等)
1、设置面板上操作模式
2、设置电压电流开关(注意:开关在接线段子下面,需要将接线段子卸下来)
3、设置单元号
4、连接模拟量单元并配线
5、接通plc电源,创建i|o表(如没有手持编程器,则需在软件cx-p上进行操作)
然后再介绍一下软件介绍
首先在电脑上必须安装由欧姆龙授权的cx-one软件,这个软件包中包括欧姆龙plc设置的所有工具,包括编程、网络、模拟仿真等工具。
接下来介绍欧姆龙plc的编程软件cx-programmer的用法,打开装好的软件后会看到如下图
接着打开文件中的新plc,软件会提示你选型,按照实际所用型号进行选型(注意:此型号必须和实际设备相符,否则会发生错误),选好后会出现如下图的画面
在视图菜单中对视图进行操作,主要应用如下
工程工作区
梯形图工作图
开始一个新的工程
事例工程。
欧姆龙指令aryshl的用法

欧姆龙指令aryshl的用法
在欧姆龙plc的常用指令中,比较常用的功能指令有ORB并块指令、ANB串块指令、MPS进栈指令、MRD读栈指令、 MPP出栈指令、PLS上跳沿微分指令、 PLF下跳沿微分指令、MC主控指令、 MCR主控复位指令、NOP空指令等。
欧姆龙plc常用的功能指令与plc的基本功能指令有所区别,以下就介绍下欧姆龙PLC的常用功能指令,这些指令的功能及用法。
1、逐位移位指令 SFT
SFT指令,又称为移位寄存器指令,该指令带两个操作数,以通道为单位,第一个操作数为首通道号D1,第二个操作数为末通道号D2。
2、快速定时器指令 TIMH
该指令的操作数占二行,一行为定时器号000~127(不得与TIM 或CNT重复使用同号),另一行为设定时间。
设定的定时时间,可以是常数,也可以由通道000CH~019CH,20000CH~25515CH,
HR0000~HR1915中的内容决定,但必须为四位BCD码。
3、可逆计数器指令 CNTR
该指令的功能:对外部信号进行加1或减1的环形计数。
带两个操作数:计数器号000~127,设定值范围0000~9999,设定值可以用常数,也可以用通道号,用通道号时,设定值为通道中的内容。
4、结束指令END
该指令单独使用,无须操作数,是plc程序的最后一条指令,表示程序到此结束。
plc在执行用户程序时,当执行到end指令时就停止执行程序阶段,转入执行输出刷新阶段。
如果程序中遗漏end指令,编程器执行时则会显示出错信号:“no end inset”:当加上end指令后,plc才能正常运行。
本指令也可用来分段调试程序。
PLC欧姆龙的基本操作指令及常用程序设计

目录
• PLC基础知识 • 欧姆龙PLC介绍 • 基本操作指令 • 常用程序设计 • 欧姆龙PLC的应用案例
01
CATALOGUE
PLC基础知识
PLC的定义与特点
总结词
可编程逻辑控制器
详细描述
PLC是一种可编程的工业控制器,用于执行逻辑运算、顺序控制、定时、计数和算术运算等操作,并通过数字或 模拟输入/输出控制各种类型的机械或生产过程。
故障诊断与处理
通过PLC的故障诊断功能,实时监 测生产线设备的运行状态,一旦 发生故障,能够迅速定位并采取 相应的处理措施,保障生产线的 稳定运行。
智能仓储系统控制
仓储设备控制
欧姆龙PLC在智能仓储系统中用于控制货物的存取和运输设备,如升降机、堆垛机、输 送带等。
库存管理
通过与上位机管理系统连接,PLC能够实时获取库存信息,并根据需求进行自动补货和 调整货位。
数据输出指令
用于控制输出设备,如指示灯、电机 等。常用的指令有"OUT"和"OL"。
算术运算指令
加法指令
用于两个数值之间的加法运算。常用 的指令有"ADD"和"AD"。
减法指令
用于两个数值之间的减法运算。常用 的指令有"SUB"和"SB"。
乘法指令
用于两个数值之间的乘法运算。常用 的指令有"MUL"和"ML"。
PLC的基本结构和工作原理
总结词
基本结构和工作原理
详细描述
PLC主要由中央处理单元(CPU)、存储器、输入/输出接口、电源和编程设备 等部分组成。PLC的工作原理包括输入采样、程序执行和输出刷新三个阶段。
欧姆龙功能块定时器寄存器的使用
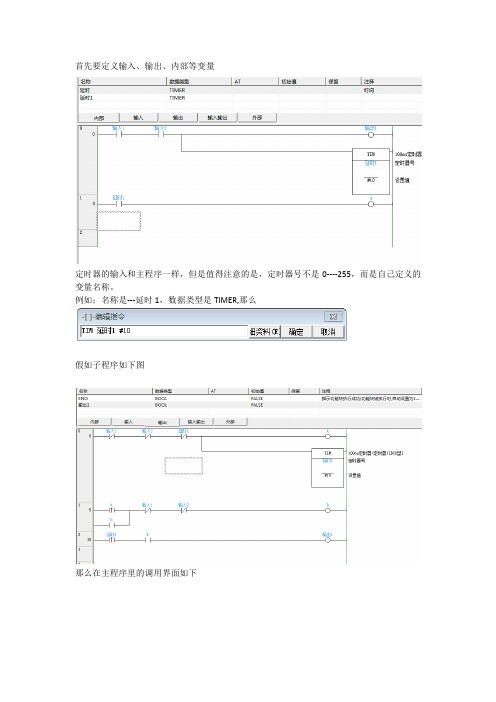
首先要定义输入、输出、内部等变量
定时器的输入和主程序一样,但是值得注意的是,定时器号不是0----255,而是自己定义的变量名称。
例如;名称是---延时1,数据类型是TIMER,那么
假如子程序如下图
那么在主程序里的调用界面如下
输入,输出地址输入的时候首先要点击
新功能块参数,然后输入地址
二,移位寄存器的使用
①要移动的位数在16位之内的,也就是一个控制字之内。
*
(例如要移动10位)
首先我们要定义变量,如下图
我们定义两个内部变量,一个名称为-起始位-,数据类型为WORD,AT指定为W100。
另外一个名称为-Q-,数据类型为BOOL,AT指定为W100.09。
*(从w100.00开始移动十个位是w100.09)。
写SFT指令的时候,起始字和结束字都写我们定义好的名称为--起始位—的变量
②要移动的位数多于16位的,*(例如是29位时)
和上面一样首先要定义变量*(内部变量,输入,输出变量)
以内部变量为例;
我们定义一个名称为-E-,数据类型为WORD的变量,和一个名称为-N-,数据类型为BOOL的变量
注意;数组变量我们写2,因为29位要占用两个字(WORD),以此类推
从W110.00开始,移动29位是W111.12
SFT指令的编写
SET空格写E然后中括号,里面写0。
空格E中括号,里面写1。
SFT E[0] E[1]
说明;我们要移动29位,长度超过1个字,所以用到了数组变量,例子中数组变量是2 ,也就是占用2个控制字*(控制字0和控制字1),以此类推。
如果变量数组设为3,那么就是0-2。
欧姆龙plc指令讲解(课件PPT)

条件
IL
新母线开始
LD ----
LD ----
ILC
新母线结束
例4下6 页
例1,分析梯形图的结构
电机优先启动控制。 有5个电机M1~M5,都有启动和停止控制按钮, 要求按顺序启动,即前级电机不启动时,后级电 机无法启动;前级电机停,后级电机也都停。
例2 下一页 47
例2,用两种分支方法分析梯形图
➢ 当定时器的输入变为
ON。
ON时,开始定时,定 ➢ 当定时器的输入变为
时时间到,定时器的输 OFF时,定时器的输
出变为ON。
出随之变为OFF。
输入on 开始定时延时时间到输出on 应用下一页
56
TIM指令的应用
注意: 定时器没有断电保持功能,断电时,定时器
复位,不能保存定时器的当前值。
2.高速定时器下一57页
B.跳转指令下一页 48
B.跳转/跳转结束指令
(JMP(04)/JME(05)
梯形图符号及操作数取值区域
功能下一页 49
JMP/JME指令的功能
(1)当JMP N的执行条件为OFF时,跳过JMP N和JME N之间的程序段,不占扫描时间 (2)有两种类型的跳转:跳转号N在01~49之间取 值时,每个N只能使用一次;当N取00值时, JMP00 —JME00可以在程序中多次使用。以00作为 JMP的跳转号时,它的执行时间比其他跳转指令的执
方法1
方法2
LD
00000
LD 00000
AND
00001
AND 00001
OR NOT
00002
OR NOT
00002
LD
00003
LD 00003
欧姆龙寄存器复习过程

欧姆龙寄存器OMRON采用通道概念存储数据,所存储数据的单元称为通道(CH),也叫字。
每个存储单元都有一个地址,就叫做首地址,简称通道号,用3位数字表现。
每个通道有16位(bit),分别称为00,01,02。
15位。
每个位就是一个软继电器,简你继电器。
因此一个通道就有16个软继电器。
通道也可用(ge ruan ji dian qi _tong dao ye ke yong)来存储十进制数据,由于十进制数可用特定的二进制编码BCD表现,因此,当用通道存储十进制数时,每4位分成1组,存储1个由BCD码表现(ma biao xian)的十进制数,将每4位称为1个数字位。
也就是说,一个通道有4个数字位,可存储4位十进制数。
OMRON PLC 将整个数据存储器分为9个区,分别是;输入继电器区、输出继电器区、内部辅助继电器区、特殊继电器区、保持继电器区、暂存继电器区、定时/计数器区、数据存储区、辅助存储继电器区、链接继电器区。
一、输入/输出继电器区输入:通道号000~015 每个通道有16个输入继电器,因此00000。
00015,01500。
01515。
256个输入继电器输出:通道号100~115 每个通道有16个输出继电器,因此10000。
10015,11500。
11515。
256个输出继电器二、内部辅助继电器区IR016~089和116~189四、特殊继电器区SR通道号244~255。
CQM1H系列的PLC常用特殊继电器的功能:25308 电池电压低时接通ON,可作低电压Ж警或其他相应处理。
25313 在PLC工作期间始终保持接通ON。
25314 有PLC工作期间始终保持断开OFF。
25315 PLC开始运行的第一个扫描周期接通,此后就一直断开;25400 周期为1min的时钟脉冲(30s通,30s断)25400 周期为1min的时钟脉冲(30s通,30s断)25401 周期为0。
02s的时钟脉冲25402 周期为0。
欧姆龙PLC HostLink协议整理

欧姆龙PLC HostLink协议整理1、常用的存储器功能区CIO:输入继电器 272 点(17 CH) 0.00~16.15输出继电器 272 点(17 CH) 100.00~116.15内部辅助继电器 4,800 点(300 CH) 1200.00~1499.15 (1200~1499 CH)37,504 点(2,344 CH) 3800.00~6143.15 (3800~6143 CH)内部辅助继电器:8,192 点(512 CH) W000.00~W511.15 (W0~W511 CH)暂时存储继电器:16 点 TR0~TR15保持继电器:8,192 点(512 CH) H0.00~H511.15 (H0~H511 CH)特殊辅助继电器:只读(不可写入) 7168 点(448 CH) A0.00~A447.15 (A0~A447CH)可读/写 8192 点(512 CH) A448.00~A959.15 (A448~A959 CH)定时器:4,096 点 T0~T4095计数器:4,096 点 C0~C4095DM 区:32K 字 D0~D32767数据寄存器:16 点(16 位) DR0~DR15变址寄存器:16 点(32 位) IR0~IR15任务标志:32 点 TK0000~TK00312、HostLink串口测试典型设置:9600 E-7-23、Hostlink通讯协议有两种模式:C-mode和FINS1.Cmode:专用于hostlink通讯指令,采用的是ASCII码,适用于所有OMRON 的PLC通讯。
只能上位机发出指令给CPU,CPU无法主动发数据给上位机。
2.FINS:采用的二进制码,适用于新开发的PLC,可用在多种网络设备(Controller Link, Ethernet, etc),可被 CPU、IO模块、上位机主动发出,不同的指令分别适用于不同的信息接受单元。
有两种链接协议:CMND和hostlink,当上位机是做发送源时,必须采用hostlink协议。
OMRON-常用指令

第3章常用指令与编程现代PLC都具有丰富的指令系统,利用这些指令编程,能够容易地实现各种复杂的控制操作。
对于PLC系统,指令是最基础的编程语言,掌握常用指令的功能及其应用方法,这对用好PLC及其系统设计极其重要。
本章主要介绍CS1的各类指令,但由于该机型的指令数量较多,限于篇幅等因素,本书只对常用的指令进行介绍。
按功能可将这些指令分为基本指令、数据操作指令、常用控制指令和高级指令等。
其他指令,可参考OMRON 公司提供的编程手册和操作手册等资料。
3.1 基本指令可编程序控制器的基本指令主要包括顺序输入指令、顺序输出指令、顺序控制指令、定时器和计数器指令等。
这些指令用来执行以位(bit)为单位的逻辑操作,它们是用PLC替代继电器控制的基础。
梯形图中每个条件是否为ON或OFF,取决于分配给它的操作数位的状态。
一般来说,当该操作数位为1时,对应的继电器线圈通电、常开条件变为ON和常闭条件变为OFF;反之,该操作数位为0,则对应的继电器线圈断电、常开条件为OFF和常闭条件为ON。
在梯形图中,一条指令前面的常开、常闭等条件的逻辑组合产生了执行条件,执行条件是否具备,决定于指令的状态。
对于继电器线圈类指令,当执行条件ON(具备)时,则对应的继电器线圈得电;当执行条件为OFF(不具备)时,对应的继电器线圈断电。
对于功能类指令,当执行条件为ON时,该功能指令执行;当执行条件为OFF时,则该功能指令不执行。
指令行上的逻辑组合可以分成几个部分,每一部分均为一个逻辑块。
利用逻辑块能够更有效地编程。
3.1.1顺序输入指令常用顺序输入指令包括加载、基本逻辑运算、逻辑块,主要用于对继电器进行最基本的输入操作,如表3-1所示。
表3-1顺序输入指令表2. 几点说明上表中指令除了列出的一般功能外,有些指令还加注前缀符号,下面分别加以说明。
(1)操作数位上表中顺序输入指令的操作数,以位为单位进行操作,且不影响标志位。
(2)指令的特定功能表中的特定功能是指这些指令具有微分和刷新功能等,其中上升沿微分的前缀标志为“@”,下降沿微分的前缀标志为“%”,刷新的前缀标志为“!”,它们还可以组合成前缀标志为“!@”和“!%”。
欧姆龙plc指令讲解讲解
跳步指令(zhǐlìng)的应用
跳转指令(zhǐlìng)的互锁应用
精品资料
跳转指令(zhǐlìng)的应用----互锁
C.定时器和计数器指令(zhǐlìng) 下一
精品资料
C. 定时器和计数器指令(zhǐlìng)
CPM1A提供的定时计数功能:
} 定时器TIM
(2)有两种类型的跳转:跳转号N在01~49之间取值 时,每个N只能使用一次;当N取00值时,JMP00 — JME00可以在程序中多次使用。以00作为JMP的跳转号时,
它的执行时间比其他跳转指令的执行时间要稍长一些。
(3)多个JMP N可以共用一个JME N,如JMP 00—JMP
00—JME 00 。 (4)跳转指令可以嵌套使用,但必须是不同跳转号的嵌 套,如JMP 00—JMP 01—JME 01—JME00。
应用--》下页
精品资料
OR和OR NOT指令(zhǐlìng)应用
精品资料
5.AND LD指令
AND LD指令(zhǐlìng)的 使用
精品资料
功能:AND LD指令 (zhǐlìng)用于逻 辑块的串联连接, 即对逻辑块进行逻 辑“与”的操作。
AND LD指令(zhǐlìng)
方法1
方法2
LD
功能: LD指令表示常开触点(chù diǎn)与左侧母线连接;
LD NOT指令表示常闭触点(chù diǎn)与左侧母线 连接。
精品资料
2.OUT和OUT NOT指令(zhǐlìng)
功能: OUT指令输出运算结果(jiē guǒ); OUT NOT指令将运算结果(jiē guǒ)取反后再输出。
• 功能:IL总是和ILC指令一起使用,用于处理梯
7.3.2 指令详解_零起步轻松学欧姆龙PLC技术_[共12页]
![7.3.2 指令详解_零起步轻松学欧姆龙PLC技术_[共12页]](https://img.taocdn.com/s3/m/c393c08677232f60dccca1d7.png)
操作数 D1、D2
CIO、W、H、A
当复位输入为 ON 时,将 D1 到 D2 所有通道位复位清零。 D1、D2 通道要求同为一个区域类型,在设置时通常要求 D1≤D2,若出现 D1≥D2,则只会对 D1 一个通道移位
(2)指令使用举例 移位寄存器(SFT)指令使用如图 7-10 所示。
图 7-10 移位寄存器(SFT)指令使用举例
如果复位输入位 H0.15 为 1,移位信号输入位为 1,当 0.00 触点闭合时,D100~D102 所有位及 CY 位全被复位为 0。
3.非同步移位寄存器(ASFT)指令
(1)指令说明 指令说明如下:
零起步轻松学系列丛书
179
操作数CD1、D2来自左右移位寄存器 SFTR C D1 D2
当 C 通道的移位信号输入值(第 14 位)为 1 时进行移位,
CIO、W、 H、A、T、 C、D、@D、 *D、DR
CIO、 W、H、 A、T、 C、D、 @D、*D
移位方向设定位(第 12 位)为 0 时右移位,为 1 时左移位。
在移位时,数据输入值会被移入 D1 通道最低位(左移位 时)或 D2 通道最高位(右移位),被移出的最高位或最低位 数据会移入进位标志(CY)位中。
当复位输入值为 1 时,D1~D2 所有位均被复位
(2)指令使用举例 左右移位寄存器(SFTR)指令使用如图 7-11 所示。
图 7-11 左右移位寄存器(SFTR)指令使用举例
当常开触点 0.00 闭合时,由于 H0 通道的复位输入位(H0.15)为 0、移位信号输入位 为 1、移位方向位为 1,故 SFTR 指令执行时会进行左移位,D100~D102 通道的数据都往 左移 1 位,H0 通道的数据输入位的数据会移入 D100 的最低位,D102 的最高位数据会移 入进位标志(CY)位中。
欧姆龙指针寻址指令应用

欧姆龙指针寻址指令应用全文共四篇示例,供读者参考第一篇示例:欧姆龙指针寻址指令是现代工业控制领域中常见的一种控制指令,它通过使用指针寻址的方式来操作内部寄存器和地址,并可以方便地读取和写入不同地址的数据。
在工业自动化控制系统中,欧姆龙指针寻址指令的应用十分广泛,能够实现复杂的逻辑运算和控制任务。
一、欧姆龙指针寻址指令的基本概念欧姆龙指针寻址指令是欧姆龙PLC(可编程逻辑控制器)中的一种特殊指令,主要用于对PLC内部寄存器和存储单元的访问。
在PLC编程中,我们通常使用指令来实现不同的功能,而指针寻址指令就是其中之一。
指针寻址指令通过指定一个地址指针,然后根据该地址指针的值来读取或写入数据。
在欧姆龙PLC中,地址指针可以是一个变量,也可以是固定的地址,根据不同的需求进行设置。
通过指针寻址指令,我们可以方便地访问不同地址的数据,完成各种控制任务。
1. 数据传输和处理2. 状态监测和控制欧姆龙指针寻址指令还可以用于状态监测和控制的应用中。
通过监测不同地址的状态值,并根据这些状态值来触发不同的控制动作,实现对系统运行状态的监测和控制。
在一个工业自动化系统中,我们可以使用指针寻址指令来监测设备的运行状态,当设备出现异常时,触发相应的控制逻辑进行处理。
3. 定时器和计数器欧姆龙指针寻址指令还可以用于定时器和计数器的应用中。
通过设置定时器和计数器的地址指针,并根据这些地址指针的值来实现定时和计数功能,完成对系统运行时间和次数的监测。
在一个工业生产线中,我们可以使用指针寻址指令来实现对生产过程的计时和计数,保证生产线的正常运行。
欧姆龙指针寻址指令具有以下优势:1. 灵活性高:欧姆龙指针寻址指令可以根据不同的需求设置不同的地址指针,实现对不同地址数据的读取和写入,具有很高的灵活性。
2. 操作简便:欧姆龙指针寻址指令操作简便,只需设置地址指针和操作码即可实现对数据的访问,节省了编程时间和成本。
3. 功能强大:欧姆龙指针寻址指令功能强大,能够实现复杂的逻辑运算和控制任务,满足不同的控制需求。
OMRON 常用指令

第3章常用指令与编程现代PLC都具有丰富的指令系统,利用这些指令编程,能够容易地实现各种复杂的控制操作。
对于PLC系统,指令是最基础的编程语言,掌握常用指令的功能及其应用方法,这对用好PLC及其系统设计极其重要。
本章主要介绍CS1的各类指令,但由于该机型的指令数量较多,限于篇幅等因素,本书只对常用的指令进行介绍。
按功能可将这些指令分为基本指令、数据操作指令、常用控制指令和高级指令等。
其他指令,可参考OMRON公司提供的编程手册和操作手册等资料。
3.1 基本指令可编程序控制器的基本指令主要包括顺序输入指令、顺序输出指令、顺序控制指令、定时器和计数器指令等。
这些指令用来执行以位(bit)为单位的逻辑操作,它们是用PLC替代继电器控制的基础。
梯形图中每个条件是否为ON或OFF,取决于分配给它的操作数位的状态。
一般来说,当该操作数位为1时,对应的继电器线圈通电、常开条件变为ON和常闭条件变为OFF;反之,该操作数位为0,则对应的继电器线圈断电、常开条件为OFF和常闭条件为ON。
在梯形图中,一条指令前面的常开、常闭等条件的逻辑组合产生了执行条件,执行条件是否具备,决定于指令的状态。
对于继电器线圈类指令,当执行条件ON(具备)时,则对应的继电器线圈得电;当执行条件为OFF(不具备)时,对应的继电器线圈断电。
对于功能类指令,当执行条件为ON时,该功能指令执行;当执行条件为OFF 时,则该功能指令不执行。
指令行上的逻辑组合可以分成几个部分,每一部分均为一个逻辑块。
利用逻辑块能够更有效地编程。
3.1.1顺序输入指令常用顺序输入指令包括加载、基本逻辑运算、逻辑块,主要用于对继电器进行最基本的输入操作,如表3-1所示。
表3-1顺序输入指令表991002. 几点说明上表中指令除了列出的一般功能外,有些指令还加注前缀符号,下面分别加以说明。
(1)操作数位上表中顺序输入指令的操作数,以位为单位进行操作,且不影响标志位。
101102(2)指令的特定功能表中的特定功能是指这些指令具有微分和刷新功能等,其中上升沿微分的前缀标志为“@”,下降沿微分的前缀标志为“%”,刷新的前缀标志为“!”,它们还可以组合成前缀标志为 “!@”和“!%”。
欧姆龙PLC变址寄存器的灵活应用

欧姆龙PLC变址寄存器的灵活应用欧姆龙PLC变址寄存器的灵活应用在PLC控制系统中,需要经常对连续多个数据进行某项操作,比如产生一系列数据或者一系列数据执行连续运算或比较以及按时间来对数据进行存储,或者对连续的定时器或计时器进行批量操作等。
使用PLC的变址寄存器来操作数据将大大减少程序开销的容量,以及提高程序的可读性。
现以欧姆龙PLC来实现以上五项操作。
一:对PLC连续D区产生一组连续的数据。
图1:对D2000开始的地址连续存储100-199的数据程序剖析:1:先初始化变址寄存器IR0与数据寄存器DR0;以及数据起始值(此值与D2000第一个字关联);2:执行循环次数;修改循环次数即可产生数据的个数。
图2:监视PLC内的D2000开始地址内的数据数据剖析:进入PLC中的D区值进行监视D2000开始地址中,将会发现D2000至D2099分别存储为100-199的数据。
如果需要修改初始值时,可以在初始化时将D500输入相应的值即可,当然如果要产生200个二:对连续通道的数据执行算术运算(寻找执行平方根后为整数的数及寻找被指定数整除的数)。
图3:D3000存储来自于D2000执行的平方根后为整数的数,D4000存储来自于D1000内被3整除的数程序剖析:1:先初始化变址寄存器IR0,IR1,IR2,IR3与数据寄存器DR0,DR1,DR2以及数据初始值D500中的#100;2:执行FOR 循环,200次操作;3:32位平方根指令ROOT ,将底16位清0,高16位参与ROOT 运算,将带小数的D501进行MOVD 提取出小数值存入D502,用于分支判断;4:/B 运算,将源数据执行除法操作,并以余数D504中的值作分支判断用。
图4:PLC 内D3000开始地址存储来自于D1000内数据执行的平方根操作数据剖析: D3000开始的地址中存储的为源D2000至D2200中的数据#100-#299 共200组数据中提取的能被开平方根操作而无小数的值。
欧姆龙movb指令的用法 -回复

欧姆龙movb指令的用法-回复欧姆龙的MOV指令是编程与控制器进行通信的重要指令之一。
这个指令的用法可以根据具体的控制器型号和应用环境有所不同,但它的基本功能是将数据从一个寄存器传输到另一个寄存器中。
本文将以欧姆龙PLC控制器为例,详细介绍MOV指令的用法和注意事项。
第一步:了解MOV指令的语法和参数在欧姆龙PLC的编程软件中,我们可以使用MOV指令来传输数据。
它的基本语法是:MOV 目标寄存器, 源寄存器其中,“目标寄存器”表示数据要传送到的寄存器,而“源寄存器”则表示数据的来源。
寄存器的种类包括数据寄存器(D寄存器)、位寄存器(C、T、M寄存器等)和特殊功能寄存器(如计数器和定时器寄存器)。
在使用MOV指令时,我们需要确保目标寄存器和源寄存器的数据类型和长度相匹配,以保证数据的准确传输。
第二步:选择正确的寄存器类型在使用MOV指令之前,我们需要确定数据来源和目标所属的寄存器类型。
如果数据是整数类型,我们通常会选择数据(D)寄存器。
如果数据是布尔类型,我们可以选择位(C、T、M等)寄存器,其中C寄存器表示控制继电器、T寄存器表示定时器、M寄存器表示内部存储器。
除了这些寄存器,欧姆龙PLC还提供了一些特殊功能寄存器,如计数器和定时器寄存器,可以根据具体应用的需求进行选择。
在选择寄存器类型时,我们需要考虑数据的长度和性质,以及PLC控制器的具体要求。
第三步:了解MOV指令的操作方式MOV指令有两种操作方式:直接传送和复制传送。
直接传送意味着将源寄存器的值直接复制到目标寄存器中,而不会改变源寄存器的值。
复制传送则会将源寄存器的值复制到目标寄存器,并同时改变源寄存器的值。
在实际应用中,我们需要根据具体的需求选择适当的操作方式。
第四步:使用MOV指令进行数据传输在实际编程中,我们可以在PLC控制器的程序中使用MOV指令进行数据传输。
例如,如果我们想将一个输入信号(如开关状态)传输到一个输出寄存器中,我们可以使用以下代码:MOV 输出寄存器, 输入信号其中,输出寄存器是目标寄存器,输入信号是源寄存器。