abb定位器调节方法
ABB定位器和FISHER阀门定位器调试步骤与方法

ABB定位器和FISHER阀门定位器调试步骤与方法一、ABB定位器调试步骤:1、定位器面板设置:2、内部接线(4根)反馈和指令线。
3、调试前的重要参数切换方式:(1)切换就地、远方。
按住MODE键不要松开,再点击↑↓键可以进行切换。
(2)用(1) 的方式进入1.1(远方控制)1.2(就地控制)(3)若要实现快开,则先按住↑键再按键↓键;实现快关,则先按住↓键再按住↑键,方可完成操作。
(4)用 (1)的方式进入1.3,出现单词SENS-POS,其意思是显示调节定位器后连杆与后旋钮弧度保持在对称的范围内。
4、调试步骤(1) P1.0:将↑↓键同时按,然后点击”ENTER”键,出现单词“LINEAR”调节角行程和直行程。
(2)P1.1:按住MODE键,点击↑↓键,进入P1.1菜单。
常按ENTER键3S,然后面板显示倒数计时为0后松开,就出现自整定,直到出现完成“COMPIETE”单词。
(3)P1.4:退出(EXIT)会显示“保存”和“不保存”,按住“ENTER”3S,则保存调试,若不保存,直接按↑键,退出到“放弃”单词,然后再按住“ENTER”3S,退出。
(4)P2.3出现REVERSE单词,显示的是调节阀门和定位器的正反作用。
(5)P3.2出现CW/CCW单词,调节的是DCS和就地定位器指令的正反作用。
(6)P3.3出现EXIT单词,意思为退出。
(7)P8.2出现DIGEET单词,则调节的是DCS和就地定位器反馈的正反作用。
以上参数为重要参数调试步骤,详情请查看说明书!二、FISHER阀门定位器DVC6000调试步骤:打开275/375手操器从主菜单(Main Menu)选择Hart应用(HART Application)从On line找到该定位器。
依次进入Setup&Diag ——Detailed Setup——Mode——Instument Mode (或者按手操器上快捷键直接进入)——警告!in service 模式被送到仪表当中时阀门也许会动(WARNING!Valve may move when in Service mode is sent to the instrument.)按OK 后进入仪表模式(Instrument Mode)选择Out of service 后按ENTER——提示“Instrument mode is already out of service!”后回到主界面依次进入Setup&Diag——Basic Setup——Auto setup——Setup Wizard:1、选择你所使用的压力单位(Pressure units (psi))后ENTER ;2、输入最大供气压力(Max Supply Press (psi))后ENTER;3、选择执行机构的生产厂家(Actuator Manufcture)后ENTER 以上品牌没的话选OTHER ;4、如果执行机构单作用带弹簧选3 、双作用带弹簧选4 、双作用不带弹簧选2;5、选ROTARY 下一步根据阀门零信号时是开选2 关的话选1 下一步再选1 下一步选YES自动选择阀门转向及其增益大小;6、选择是否有加速器或者快速释放阀(Is a Volume Booster or Quick Release Present ? );7、提示执行机构的信息正被发送到仪表当中,请稍等“Actuator information is being sent to the instrument. Please wait…”;8、选择使用出厂默认设置Use Factory defaults for setup?(Yes is recommended for Initial Setup) Yes 后ENTER ;9、提示出厂默认设置正被发送到仪表当中,请稍等“Factory default are being sent to the instrument. Please wait…”;10、继续自动设置选择放大器调整“To continue Auto Setup.select Relay Adjust ”;11、你是否希望现在进行放大器调整?(Do you wish to run Relay Adjustment Calibration now ?) 假如是双作用选择Yes 单作用选择No后ENTER ;12、选择行程标定(To continue.select Auto Calib Travel.)按OK;13、你希望现在进行自动行程标定吗?(Do you wish to run Auto Travel Calib now ?Select YES if initial setup)选择Yes 后按ENTER;14、警告!标定将导致仪表的输出突然变化按OK;15、选择交点的调整(Select Crossover Adjust)Manual/Last Value/Default 正常情况下选择default 后ENTER 假如默认的调整后精度比较差才会选择Manual手动;16、下面进入自动行程标定的过程,完成后仪表模式恢复到In service!。
ABB定位器说明指导书

ABB定位器说明指导书ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS 接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、 定位器无法自整定:自整定时在屏幕上显示 这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
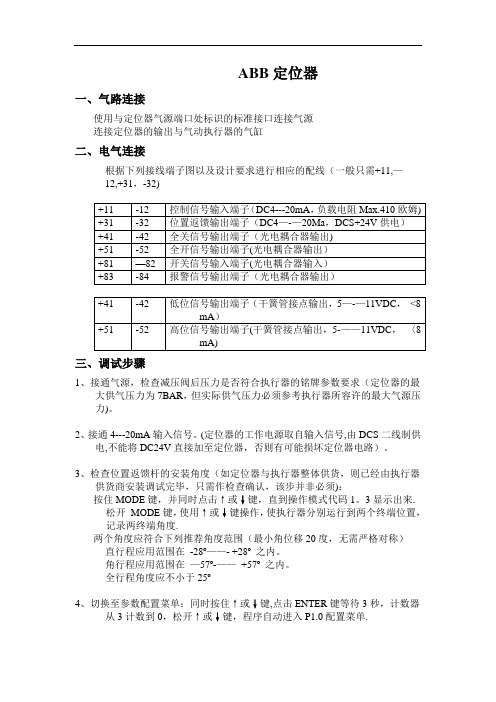
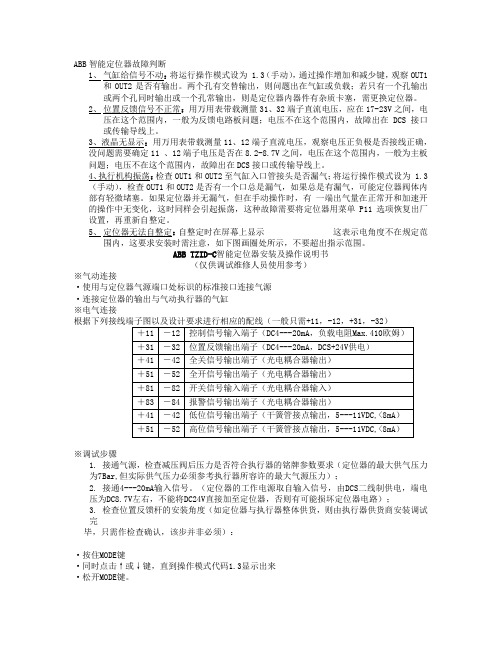
ABB TZID-C 智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸 ※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32) +11 -12 控制信号输入端子(DC4---20mA ,负载电阻Max.410欧姆)+31 -32 位置反馈输出端子(DC4---20mA ,DCS+24V 供电) +41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+-开关信号输入端子(光电耦合器81 82 输入)+83 -84 报警信号输出端子(光电耦合器输出)+41 -42 低位信号输出端子(干簧管接点输出,5---11VDC,<8mA )+51 -52 高位信号输出端子(干簧管接点输出,5---11VDC,<8mA )※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA 输入信号。
ABB气动执行机构定位器调试步骤

ABB气动执行机构定位器调试步骤ABB气动执行机构定位器是一种用于控制阀门开闭的装置,其主要作用是将气动执行机构的运动转换为阀门的旋转或线性运动,完成阀门的开闭动作。
在实际应用中,正确调试气动执行机构定位器是确保阀门正常运行的重要环节。
以下是ABB气动执行机构定位器调试的步骤以及注意事项。
步骤一:安全准备在调试之前,首先需要做好安全准备工作。
包括穿戴个人防护装备,如安全帽、防护眼镜和手套等。
确保所有电源和压缩空气的供应已经接通,并检查执行机构和定位器的状态是否正常。
步骤二:调整气动系统在进行调试之前,需要先进行气动系统的调整。
这主要包括调整空气压力和流量,确保气动执行机构的动力源得到充足的供应。
也需要检查阀门、过滤器和压力调节器等气动元件是否正常工作。
步骤三:安装定位器按照要求将定位器安装在气动执行机构上。
确保定位器与气动执行机构连接牢固,并且接口处无泄漏。
调整定位器的位置,使得其能够准确地感知气动执行机构的运动。
步骤四:连接电气控制系统将定位器与电气控制系统进行连接。
包括连接电源和输入输出信号线。
确保连接正确,避免短路和接线错误。
步骤五:调试定位器开始实际调试工作。
首先需要设置定位器的运动范围和动作方式。
根据阀门的要求,设置定位器的行程和速度。
然后进行手动操作,观察定位器的工作状态。
如果有异常情况,如运动不流畅或无法准确停止等,需要进行相应的调整。
步骤六:校准位置反馈定位器通常具有位置反馈功能,可以将阀门的实际位置反馈给控制系统。
在调试过程中,需要校准位置反馈。
可以通过手动操作阀门,观察反馈信号的变化,然后调整定位器的位置反馈参数,使得反馈信号与阀门的实际位置一致。
步骤七:自动调试完成手动调试后,可以进行自动调试。
通过控制系统对定位器进行远程控制,进行开关测试和位置调整。
观察阀门的动作是否准确,并调整相关参数以达到预期的效果。
步骤八:测试和调整在完成自动调试后,需要进行测试和调整。
通过开关测试和阀门操作测试,观察阀门的工作情况是否正常。
ABB定位器使用与调校

3、105-FV-00603调节阀过量不易控制,工艺反映在阀开度 105-FV-00603调节阀过量不易控制, 调节阀过量不易控制 20%时过量不足 但是若增加1% 甚至小于1%的开度后, 时过量不足, 1%, 1%的开度后 为20%时过量不足,但是若增加1%,甚至小于1%的开度后, 量却又过的太大,造成工艺阀位的调节上不便操作。 量却又过的太大,造成工艺阀位的调节上不便操作。
解决方法:现场检查调节阀,发现有漏量现象, 解决方法:现场检查调节阀,发现有漏量现象,随后返回维修工厂进 行处理,再次投用上仍然有此情况,问题没有得到解决。 行处理,再次投用上仍然有此情况,问题没有得到解决。于是将问题 认定到定位器上面,但是定位器的设置和调节并没有任何问题, 认定到定位器上面,但是定位器的设置和调节并没有任何问题,但工 艺反映的问题又确实存在, 艺反映的问题又确实存在,既而怀疑调节阀的阀芯磨损或是在其选型 上有关系。而工艺此时又需维持阀位的操作, 上有关系。而工艺此时又需维持阀位的操作,询问工艺得知该阀常工 作在一个小开度的位置,于是通过定位器对阀的流量特性进行修正, 作在一个小开度的位置,于是通过定位器对阀的流量特性进行修正, 进入菜单“P2.2”的特性曲线项进行设定 选择特性曲线为“1/50”, 的特性曲线项进行设定, 进入菜单“P2.2”的特性曲线项进行设定,选择特性曲线为“1/50”, 调试完后,操作不便的现象得到一定程度上的改善。( LINEAR”表 。(“ 调试完后,操作不便的现象得到一定程度上的改善。(“LINEAR”表 示使阀按线性调节开度,中控室给多少阀位,现场阀就开多大的开度; 示使阀按线性调节开度,中控室给多少阀位,现场阀就开多大的开度; 1/25,1/50”是表示使阀在一个范围内接受中控室给一个大的 “EP 1/25,1/50”是表示使阀在一个范围内接受中控室给一个大的 开阀信号,而阀却开一个小于该阀位的开度, 开阀信号,而阀却开一个小于该阀位的开度,当越过这一范围时调节 阀对控制信号的变化很大; 25/1, 阀对控制信号的变化很大;“EP 25/1,50/1” 是表示使阀在一个范 围内接受中控室给一个小的开阀信号, 围内接受中控室给一个小的开阀信号,而阀却开一个大于该阀位的开 当越过这一范围时调节阀对控制信号的变化不大), ),从该情况中 度,当越过这一范围时调节阀对控制信号的变化不大),从该情况中 可以总结出通过特性曲线的修正可以在一定程度上解决工艺此类操作 不便的问题。 不便的问题。
ABB定位器调试方法

调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在-28º--- +28º 之内。
角行程应用范围在-57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
6.启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):•按住MODE键•点击⇧键一次或多次,直到显示出“P1.1”•松开MODE键•按住ENTER键3秒直到计数器倒计数到0•松开ENTER键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
ABB气动执行机构定位器调试步骤

气路连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3.检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):•按住MODE键。
•并同时点击⇧或⇩键,直到操作模式代码1.3显示出来。
•松开 MODE键。
•使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度•两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º 之内。
角行程应用范围在 -57º--- +57º 之内。
全行程角度应不小于25º4.切换至参数配置菜单•同时按住⇧和⇩键•点击ENTER键•等待3秒钟,计数器从3计数到0•松开⇧和⇩键程序自动进入P1.0配置菜单。
5.使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心,一般角位移为90ºPage 1 of 7直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
ABB智能定位器
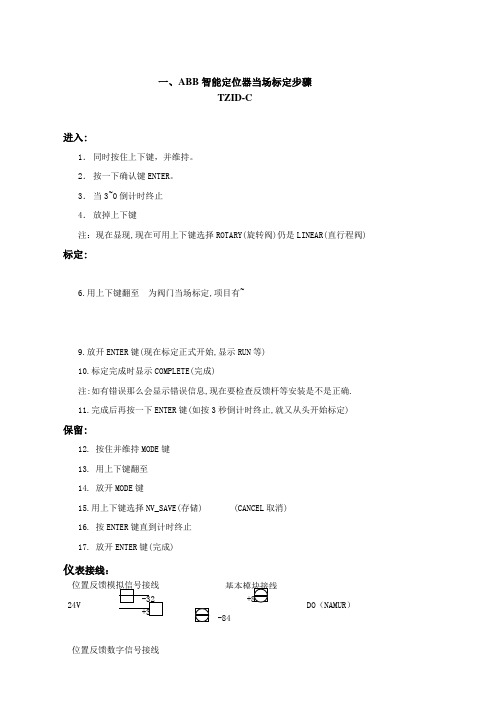
24V-84一、ABB智能定位器当场标定步骤TZID-C进入:1.同时按住上下键,并维持。
2.按一下确认键ENTER。
3.当3~0倒计时终止4.放掉上下键注:现在显现,现在可用上下键选择ROTARY(旋转阀)仍是LINEAR(直行程阀)标定:6.用上下键翻至为阀门当场标定,项目有~9.放开ENTER键(现在标定正式开始,显示RUN等)10.标定完成时显示COMPLETE(完成)注:如有错误那么会显示错误信息,现在要检查反馈杆等安装是不是正确.11.完成后再按一下ENTER键(如按3秒倒计时终止,就又从头开始标定)保留:12. 按住并维持MODE键13. 用上下键翻至14. 放开MODE键15.用上下键选择NV_SAVE(存储) (CANCEL取消)16. 按ENTER键直到计时终止17. 放开ENTER键(完成)仪表接线:位置反馈数字信号接线DO(NAMUR)SW1-52 +51 SW224V-82+11 -12二、ABB 智能定位器当场操作步骤选择操作模式:模式:自适应操纵1、 按住并维持MODE 键2、 另外按3、 显示4、 放开5、 显示自动运行状态模式:修正操纵 1、 按住并维持MODE 键切断功能接线 4~20MA 信号DI (12V )2、 另外按3、显示4、放开五、显示强制操纵正在运行模式:行程范围内手动调整 一、按住并维持MODE 键 2、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是0%~100%的阀位六、按 或 在行程范围内调整定位器模式:行程范围内手动调整 一、按住并维持MODE 键 3、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是阀门转角(注1)六、按 或 在行程范围内调整定位器注1:直行程必需在-280~280之间,角行程必需在-570~570之间。
三、阀位与行程反馈不对应解决方式如图1所示,定位器的原理是气缸的角位移通过‘中间连接件’传递给‘反馈轴’,反馈轴上的‘传动齿轮’去带动反馈电机,测得的反馈电势与输出维持平稳。
ABB定位器调试

ABB定位器一、气路连接使用与定位器气源端口处标识的标准接口连接气源连接定位器的输出与气动执行器的气缸二、电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)三、调试步骤1、接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2、接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3、检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):按住MODE键,并同时点击↑或↓键,直到操作模式代码1.3显示出来。
松开 MODE键,使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度。
两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
全行程角度应不小于25º4、切换至参数配置菜单:同时按住↑或↓键,点击ENTER键等待3秒,计数器从3计数到0,松开↑或↓键,程序自动进入P1.0配置菜单。
5、使用↑或↓键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
6、启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):按住MODE键,点击↑键一次或多次,直到显示出“P1.1”,松开MODE键,按住ENTER键3秒直到计数器倒计数到0,松开ENTER 键,自动调整程序开始运行(显示器显示正在进行的程序语句号),自动调整程序顺利结束后,显示器显示“COMPLETE”。
ABB定位器
ABB定位器ABB定位器调试一、四个按键功能介绍ENTER : 确认信息、开始动作、保存MODE: 选择操作模式、选择参数组或参数↑:上翻键↓:下翻键二、技术参数信号范围: : 4-20 mA 或分程范围供电电压: : 8,7 VDC (非防爆)9,7 VDC (防爆)气源压力: :1. 4 ---6 bar气源的要求:仪表气体无油、无尘、无水环境温度: : -40-+85 ℃三、定位器调试--- 执行器类型选择1、同时按住“↑”和“↓”键,点击ENTER键,屏幕出现倒计时,等待三秒倒计时到0后,松开“↑”和“↓”键显示器显示P1.02、用“↑”或“↓”键选择LINEAR,(直行程)或ROTARY(角行程)。
3、按住“MODE”键,点击“↑”多次直至屏幕显示“P1.4 EXIT”时松开按键。
4、用↑”或“↓”键选择NV_SAVE,按住ENTER 键直到计数器倒计数结束后松开,修改的参数就会被保存,如果该步选择‘CANCEL’修改的参数则不会被保存。
定位器调试--- 位置反馈杆安装角度检查1、按住MODE键2、同时按↑或者↓键,直到操作模式代码“1.3 MAN_SENS”显示出来3、松开所有按键后就激活了安装角度检查操作模式4、显示屏会显示反馈杆旋转角度,按↑或者↓键检查位置反馈杆最上和最下旋转角度,应符合:直行程:-28 °至+ 28°角行程:-57°至+57°全行程总角度不低于25°5、一般出厂设置旋转角度是正常范围内的,如果检查旋转角度异常可以通过松开位置反馈杆上的锁紧螺母转动位置反馈杆到合适位置再拧紧锁紧螺母。
定位器调试--- 自动整定方法一:1、按住MODE键5秒,直到出现“ADJ_LIN”(这是直行程整定方法,角行程按住ENTER键5秒出现“ADJ_ROT”)时松开MODE 键。
2、再按住MODE键直到显示器出现倒计时3、2、1、0倒计时结束后松开MODE键。
ABB定位器使用与调校解析

阀位 100
(b) (a)
(c)
0 100 给定
上图是以上三类曲线的示意图:(a)表示线性;(b)表示25/1、 50/1;(c)表示1/25、1/50;
4、104-FV-21303调节阀震荡明显,造成流量波动过大,操作 不稳定。
解决方法:首先检查气路环节,即检查风压是否达到要求, 风线接头处是否漏气,定位器是否漏气等。具体步骤为: 将其打到手动状态,使阀开到一定开度,观察阀位是否变 化,其上面的小风表也会有灵敏的变化,可据此判断定位 器环节是否漏气,而若阀杆与膜头连接处漏风,则说明膜 片破损。经检查后,发现定位器进气模块处漏风,随后进 行密封处理,漏气现象消除,但阀还是震荡,于是对调节 阀进行自整定,看自整定能否消除震荡现象。整定完后调 节阀仍然震荡,于是在此基础上对其进行参数的调整以达 到较快解决问题的目的。定位器中包含有PID参数,故而 它也相当于一个调节器,因此对参数的调整会相对比较烦 琐一些,解决阀震荡的参数只要有以下几项:
3、105-FV-00603调节阀过量不易控制,工艺反映在阀开度为 20%时过量不足,但是若增加1%,甚至小于1%的开度后,量 却又过的太大,造成工艺阀位的调节上不便操作。
解决方法:现场检查调节阀,发现有漏量现象,随后返回维修工厂进 行处理,再次投用上仍然有此情况,问题没有得到解决。于是将问题 认定到定位器上面,但是定位器的设置和调节并没有任何问题,但工 艺反映的问题又确实存在,既而怀疑调节阀的阀芯磨损或是在其选型 上有关系。而工艺此时又需维持阀位的操作,询问工艺得知该阀常工 作在一个小开度的位置,于是通过定位器对阀的流量特性进行修正, 进入菜单“P2.2”的特性曲线项进行设定,选择特性曲线为 “1/50”,调试完后,操作不便的现象得到一定程度上的改善。 (“LINEAR”表示使阀按线性调节开度,中控室给多少阀位,现场 阀就开多大的开度;“EP 1/25,1/50”是表示使阀在一个范围内接 受中控室给一个大的开阀信号,而阀却开一个小于该阀位的开度,当 越过这一范围时调节阀对控制信号的变化很大;“EP 25/1,50/1” 是表示使阀在一个范围内接受中控室给一个小的开阀信号,而阀却开 一个大于该阀位的开度,当越过这一范围时调节阀对控制信号的变化 不大),从该情况中可以总结出通过特性曲线的修正可以在一定程度 上解决工艺此类操作不便的问题。
ABB定位器调试
ABB定位器一、气路连接使用与定位器气源端口处标识的标准接口连接气源连接定位器的输出与气动执行器的气缸二、电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,—12,+31,-32)三、调试步骤1、接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2、接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3、检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):按住MODE键,并同时点击↑或↓键,直到操作模式代码1。
3显示出来.松开MODE键,使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度.两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在-28º——- +28º之内。
角行程应用范围在—57º-——+57º之内。
全行程角度应不小于25º4、切换至参数配置菜单:同时按住↑或↓键,点击ENTER键等待3秒,计数器从3计数到0,松开↑或↓键,程序自动进入P1.0配置菜单.5、使用↑或↓键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差.6、启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):按住MODE键,点击↑键一次或多次,直到显示出“P1.1”,松开MODE键,按住ENTER键3秒直到计数器倒计数到0,松开ENTER 键,自动调整程序开始运行(显示器显示正在进行的程序语句号),自动调整程序顺利结束后,显示器显示“COMPLETE”。
ABB定位器参数说明(20170322)

SLOW;FAST
CANCEL
REVERSE LOW_CUR RECALL CURRENT 4.0MA;FAILED; ALRM_CUR CANCEL ACTIV_LO ACTIV_LO ACTIV_LO ALRM_ON;SW1_ON;SW2_ON; ALL_ON CANCEL POS_0%;POS_100%;POS_HOLD
200 42.20% 42.20% 2.00% 0.20% MEDIUM INACTIVE NV_SAVE 4MA 20MA DIRECT(4 mA对应0%阀 HIGH_CUR DIRECT
NONE
NV_SAVE ACTIV_HI ACTIV_HI ACTIV_HI
NONE
NV_SAVE
NONE
NV_SAVE
P2.2
P2.3 P2.4 P2.5 P2.6 P2.7 P2.8 P3.0 P3.1
P3.2
P3.3 P4.0 P4.1 P4.2
P4.3
P4.4
P4.5
P5.0
P5.1 P5.2 P5.3 P5.4 P5.5 P5.6 P5.7 P6.0 P6.1 P6.2
P6.3
P6.4 P6.5 P6.6 P7.0 P7.1 P7.2
起始点方向设置
CTCLOCKW(全关即反馈杆 逆时针方向
CLOCKW
退出大运行操作级 NV_SAVE
CANCEL
定位超时
OFF
第一位置信号设置点 0.00%
第二位置信号设置点 100.00%
高于或低于第一位置 信号时有效
FALL_BEL
EXCEED
高于或低于第二位置 信号时有效
ABB智能定位器TZID-C调试说明书(中文正式版).
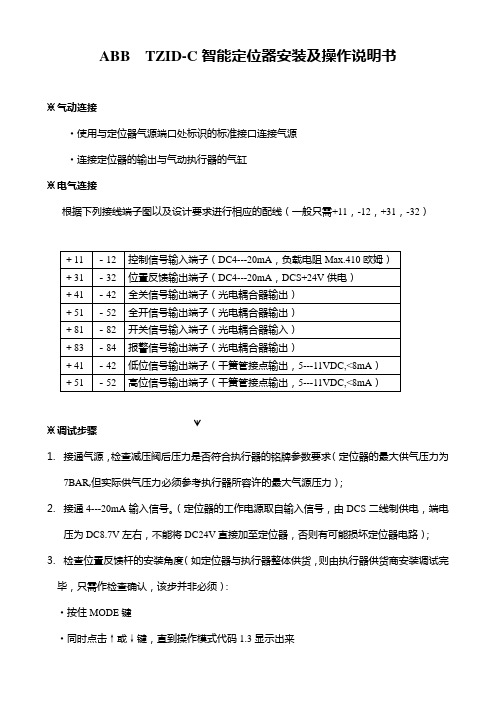
ABB TZID-C智能定位器安装及操作说明书※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31 -32 位置反馈输出端子(DC4---20mA,DCS+24V供电)+41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+81 -82 开关信号输入端子(光电耦合器输入)+83 -84 报警信号输出端子(光电耦合器输出)+41 -42 低位信号输出端子(干簧管接点输出,5---11VDC,<8mA)+51 -52 高位信号输出端子(干簧管接点输出,5---11VDC,<8mA)※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力);2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
·使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度。
·两个角度应符合下列推荐角度范围(最小角位移20度;无需严格对称)直行程(小角度)应用在-28°---+28°之内。
角行程(大角度)应用在-57°---+57°之内。
ABB定位器调试步骤
ABB定位器调试步骤
1.定位器面板设置:
ENTER↑
MODE↓LKS
2.内部接线(4根)反馈和指令线。
3..调试前的重要参数切换方式:
①切换就地、远方按住MODE键不要松开,再点击↑↓键可以进行切换。
②用①的方式进入1.1(远方控制)1.2(就地控制)
③若要实现快开,则先按住↑键再按键↓键;实现快关,则先按住↓键再按住↑键,方可完成操作。
④用①的方式进入1.3,出现单词SENS-POS,其意思是显示调节定位器后连杆与后旋钮弧度保持在对称的范围内。
4、调试步骤
①P1.0:将↑↓键同时按,然后点击”ENTER”键,出现单词“LINEAR”调节角行程和直行程。
②P1.1:按住MODE键,点击↑↓键,进入P1.1菜单。
常按ENTER键3S,然后面板显示倒数计时为0后松开,就出现自整定,直到出现完成“COMPIETE”单词。
③P1.4:退出(EXIT)会显示“保存”和“不保存”,按住“ENTER”3S,则保存调试,若不保存,直接按↑键,退出到“放弃”单词,然后再按住“ENTER”3S,退出。
④P2.3出现REVERSE单词,显示的是调节阀门和定位器的正反作用。
⑤P3.2出现CW/CCW单词,调节的是DCS和就地定位器指令的正反作用。
⑥P3.3出现EXIT单词,意思为退出。
⑦P8.2出现DIGEET单词,则调节的是DCS和就地定位器反馈的正反作用。
以上参数为重要参数调试步骤,详情请查看说明书!
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
ABB定位器

ABB定位器调试一、四个按键功能介绍ENTER : 确认信息、开始动作、保存MODE: 选择操作模式、选择参数组或参数↑:上翻键↓:下翻键二、技术参数信号范围: : 4-20 mA 或分程范围供电电压: : 8,7 VDC (非防爆)9,7 VDC (防爆)气源压力: :1. 4 ---6 bar气源的要求:仪表气体无油、无尘、无水环境温度: : -40-+85 ℃三、定位器调试--- 执行器类型选择1、同时按住“↑”和“↓”键,点击ENTER键,屏幕出现倒计时,等待三秒倒计时到0后,松开“↑”和“↓”键显示器显示P1.02、用“↑”或“↓”键选择LINEAR,(直行程)或ROTARY(角行程)。
3、按住“MODE”键,点击“↑”多次直至屏幕显示“P1.4 EXIT”时松开按键。
4、用↑”或“↓”键选择NV_SAVE,按住ENTER 键直到计数器倒计数结束后松开,修改的参数就会被保存,如果该步选择‘CANCEL’修改的参数则不会被保存。
定位器调试--- 位置反馈杆安装角度检查1、按住MODE键2、同时按↑或者↓键,直到操作模式代码“1.3 MAN_SENS”显示出来3、松开所有按键后就激活了安装角度检查操作模式4、显示屏会显示反馈杆旋转角度,按↑或者↓键检查位置反馈杆最上和最下旋转角度,应符合:直行程:-28 °至+ 28°角行程:-57°至+57°全行程总角度不低于25°5、一般出厂设置旋转角度是正常范围内的,如果检查旋转角度异常可以通过松开位置反馈杆上的锁紧螺母转动位置反馈杆到合适位置再拧紧锁紧螺母。
定位器调试--- 自动整定方法一:1、按住MODE键5秒,直到出现“ADJ_LIN”(这是直行程整定方法,角行程按住ENTER键5秒出现“ADJ_ROT”)时松开MODE键。
2、再按住MODE键直到显示器出现倒计时3、2、1、0倒计时结束后松开MODE键。
ABB定位器说明书.
ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3. 检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):·按住MODE键·同时点击↑或↓键,直到操作模式代码1.3显示出来·松开MODE键。
ABB定位器调校步骤
ABB定位器调校步骤步骤一:准备工作1.1检查机器人系统和工作环境,确保所有安全措施和防护设备已经启用。
1.2确保机器人和控制系统已经正确连接,并且机器人能够正常工作。
1.3确保机器人上安装的定位器和其他相关设备处于正常状态,并且没有损坏或松动。
步骤二:初始化机器人2.1打开ABB机器人控制系统,并确保机器人系统处于待机状态。
2.2进入ABB机器人控制系统的专用调校程序,并选择定位器调校模式。
步骤三:设置调校参数3.1在调校程序界面上输入相关参数,包括机器人的位置、姿态、姿态姿势和其他调校参数。
3.2根据实际需要设置定位器的精度和灵敏度参数。
步骤四:执行定位器调校4.1调整机器人的姿势和姿势姿势,使其与预定的位置和姿势完全吻合。
4.2通过调整机器人的位置和姿势,进行微调,以便定位器能够准确地读取和显示目标位置和姿势。
4.3对定位器进行校准,以确保机器人在工作时能够准确地定位和执行任务。
步骤五:验证定位器调校结果5.1使用校准后的定位器进行工作,观察机器人是否能够准确地定位和执行任务。
5.2如果发现机器人在工作中出现定位错误或执行不准确的情况,需要重新进行定位器调校。
步骤六:保存调校结果6.1将调校后的参数和数据保存到机器人控制系统的数据库中。
6.2对于多台机器人系统,需要为每台机器人保存独立的调校结果。
步骤七:定期检查和维护7.1定期检查机器人系统和定位器的状态,确保其正常运行。
7.2定期校准定位器,以确保机器人在工作中保持准确的定位和执行能力。
7.3对于长时间未使用的机器人系统,需要重新进行调校和校准,以恢复其准确的定位和执行能力。
总结:以上是ABB定位器调校的详细步骤。
定位器是机器人系统中非常重要的组成部分,能够对机器人的定位和姿态进行准确的测量和控制。
通过对定位器进行调校和校准,可以确保机器人在工作时能够准确地定位和执行任务,提高机器人系统的工作效率和精度。
在进行定位器调校时,需要严格按照操作步骤进行,保证调校的准确性和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB智能定位器调试及注意事项:
打开定位器气源门。
2、向定位器提供4—20MA输入信号(端子为+11,-12)。
3、检查:
(1)按下并保持MODE
(2)另外短暂按下↑或↓,直到出现MODE 1.3(手动调整)
(3)释放MODE
(4)按下↑或↓,使执行器开关至其机械限位,并记录数值,角行程执行机构显示旋转角度。
建议限位位置:直行程执行机构>-28°并<+28°;角行程执行机构>-57°并<+57°。
最小角度为25°。
4、切换至组态模式:
(1)同时按下并保持↑和↓
(2)另外短暂按下ENTER
(3)等待一会儿,直到3秒倒计时完成
(4)释放↑和↓
设备将自动返回到参数组P1._。
注意:PX.Y调节方法(同时按下并保持MODE和ENTER并保持;用↑或↓调节X / 按下并保持MODE;用↑或↓调节Y)
5、选择(用↑和↓)
参数P1.0 ACTUATOR/定义定位器安装形式角行程ROTARY或直行程LINEAR。
参数P2.3 ACTION/设定阀门正反作用方式反作用(REVERSE) 4~20MA对应开度100~
0%或正作用(DIRECT) 4~20MA对应开度0~100%参数P3.2 ZERO_POS/起始点方向设置<预设为全关即反馈杆逆时针方向>顺时针方向
关闭CLOCKW或逆时针方向关闭CTCLOCKW。
注意:以上设置必须在自动调整之前完成(即第6步)。
6、启动自动调整功能:
(1)同时按下并保持MODE和ENTER(或按下并保持MODE)
(2)另外短暂按下↑或↓,直到P1.1显示出来
(3)释放MODE
(4)按下ENTER并一直按着直到倒计时结束
(5)释放ENTER,自动调整功能启动。
(6)如果显示COMPLETE,则表示“自动调整”成功,快速按下ENTER确认。
也有可能因为某种故障“自动调整”被自动取消,同时显示错误信息。
(CLOCKRUN 10 表示超程,需重调反馈杆)
7、调整容许区域(tolerance band)(仅仅对于特殊用途的执行机构,比如特别小的执行机构)。
通常,并不需要调整。
8、如果需要,测试以上设置。
9、保存以上设置:
(1)同时按下并保持MODE和ENTER(或按下并保持MODE)
(2)另外,快速按下↑或↓直到P1.4
(3)释放MODE
(4)用↑或↓选择NV_SA VE(保存退出)
(5)按下并保持ENTER直到倒计时完成,然后释放ENTER。
设置并保存在不宜丢失存储器中,并且定位器返回到操作状态MODE 1.3(手动调整)或MODE 1.0,然后确认调为<MODE 1.0(自适应远程控制)>,先前的操作模式就被再次击活。