光电感应器
光电传感器技术的使用方法

光电传感器技术的使用方法光电传感器是一种广泛应用于工业自动化领域的传感器技术,它利用光电二极管或光电三极管等光电器件对光电信号的变化进行探测和测量。
光电传感器具有高精度、高可靠性和高灵敏度的特点,被广泛应用于物体检测、位置测量、反射光电开关、光电遥感等领域。
本文将介绍光电传感器技术的使用方法,包括选择适合的光电传感器类型、安装光电传感器、调试及校准光电传感器等方面的内容。
一、选择适合的光电传感器类型在使用光电传感器之前,首先要选择适合的传感器类型。
常见的光电传感器类型包括反射型光电传感器、透射型光电传感器和全局式光电传感器。
1. 反射型光电传感器:反射型光电传感器由发送器和接收器组成,通过测量反射光信号的强度来检测物体的存在。
适用于物体距离较远、较大和表面较暗的检测场景。
2. 透射型光电传感器:透射型光电传感器也由发送器和接收器组成,物体的存在是通过物体阻挡传感器和接收器之间的光信号来检测的。
适用于物体较小、较轻、较薄或透明的检测场景。
3. 全局式光电传感器:全局式光电传感器是一种集成了发送器和接收器的传感器,通过测量接收器收到的散射光信号的强度来检测物体的存在。
适用于不同类型、不同颜色物体的检测场景。
二、安装光电传感器正确的安装光电传感器对其正常运行非常重要。
在安装光电传感器时,应注意以下几点:1. 安装位置:根据实际需求和检测场景,选择合适的安装位置。
考虑到光线状况和物体的位置,安装在合适的角度和高度能够提高光电传感器的准确性和可靠性。
2. 防护措施:根据具体情况,选择适当的保护措施。
例如,在户外或恶劣环境中使用光电传感器时,可以使用防水、防尘外壳来保护传感器免受外部环境的影响。
3. 连接线路:正确连接光电传感器与其他设备的线路,确保稳定的电源供应和正确的信号传输。
三、调试和校准光电传感器在安装完光电传感器后,我们需要进行调试和校准来确保其正确工作。
下面是一些常见的调试和校准步骤:1. 电源和信号调试:接通电源后,检查传感器的指示灯是否点亮,确保传感器正常供电。
光电感应计数器原理图
光电感应计数器原理图
不包含标题的光电感应计数器原理图如下:
[image]
光电感应计数器是一种电子设备,用于通过光电传感器检测光线的存在或者光的强度变化,并将其转换为数字信号进行计数。
它通常包括一个光源和一个光电传感器。
光源通常是一种发光二极管(LED),它发出一束光线以照明待检测区域。
光线经过待检测区域后,被光电传感器接收。
光电传感器是一种能够将光线转换为电信号的器件。
它通常由一个光敏元件和一个电路组成。
光敏元件可以是光敏电阻、光敏二极管或者光敏三极管等。
当光线照射到光敏元件上时,它的电阻、电流或者电压会发生变化。
光电传感器的电路会将光敏元件输出的电信号进行放大和处理,然后将其转换为数字信号。
这些数字信号会传送到计数器电路,进行计数并显示。
光电感应计数器常用于对通过某个区域的物体或人员进行计数。
当物体或人员经过待检测区域时,遮挡光线,光电传感器感知到信号的变化,计数器根据信号的变化进行计数。
光电感应计数器具有快速、精确、可靠等特点,广泛应用于超市、图书馆、展览场所等需要进行人流或物品计数的场合。
光电感应传感器种类和用途

光电感应传感器种类和用途
哇塞!同学们,你们知道吗?光电感应传感器可神奇啦!它就像我们的小眼睛,能帮我们发现好多好多有趣的东西。
先来说说光电感应传感器都有哪些种类吧!有一种叫对射式光电传感器,就好像是两个小伙伴在玩接球游戏,一个在这边扔,一个在那边接。
这边发出的光线,如果被那边接住了,那就说明没问题;要是没接住,那就说明有情况啦!
还有反射式光电传感器,这就像是我们照镜子,光线照出去,碰到东西又反射回来,传感器就能知道前面有东西。
再有就是槽式光电传感器,它就像一个小凹槽,东西从中间通过的时候,光线被挡住或者没挡住,传感器就能知道啦。
那光电感应传感器都有啥用途呢?这用处可大了去啦!比如说在工厂里,它能帮工人叔叔阿姨们检测生产线上的产品有没有问题。
就像老师检查我们的作业一样认真仔细,一个小错误都不放过。
在马路上的红绿灯,不也是靠光电感应传感器来控制的吗?它能感知车流量的多少,然后决定绿灯亮的时间长一点还是短一点。
这难道不像一个聪明的交通警察,时刻指挥着车辆的通行?
在自动门那里也有它的身影呢!当我们走近的时候,它就能感觉到,然后自动打开门,就好像在说:“欢迎你来!”
在打印机里,它能保证纸张一张一张地顺利通过,不会出现卡纸的情况,这多厉害呀!
还有在电梯里,它能保证电梯的安全运行,要是有什么不对劲,电梯就会停下来,保护我们的安全。
哎呀,光电感应传感器真的是无处不在,给我们的生活带来了好多方便和安全。
它就像一个默默工作的小英雄,虽然我们看不到它,但是却一直在为我们服务。
我觉得光电感应传感器真的太重要啦,要是没有它,我们的生活肯定会变得乱糟糟的!你们说是不是呀?。
可以检测有无水的光电传感器有哪些

可以检测有无水的光电传感器有哪些
可以检测有无水的光电传感器有哪些,今天能点科技带大家了解一下光电传感器有哪些,希望可以给大家带来帮助!
光电一体式液位传感器
采用的是光学原理,光电液位传感器内置红外发射管和光敏接收器,检测部位是棱镜结构。
无水状态时,发射管所发出的光被经过透镜后会折射至接收管;
有水状态时,则光折射到液体中,从而使接收器收不到或只能接收到少量光线。
在水箱容器上或者机体上开孔安装,适合于水箱不需移动的设备
光电分离式液位传感器
是在传统光学传感器的基础上,把菱鏡部分直接设计到用户水箱上,模具一体成型出来;
光学组件分离出来,置于水箱外部感应。
传感器独立于水箱外,中间可间隔空气,解决了水箱需移动加水的问题。
用此方案的产品水位感应精准,水箱无外结构件干涉,更易清洁,避免传感器边角的细菌滋生。
管道光电液位传感器
管道光电液位传感器利用红外光学组件,通过设计形成感应线路,判断在水与空气中的光折率不同,快速稳定做出状态判断。
广泛应用于扫地机器人,洗地机,拖把机,饮水机,加湿器,咖啡机,洗碗机等清水管道的缺水或满水检测。
光电传感器的应用举例

测转速
n=f/N
n—转速; f—脉冲频率; N—圆盘孔数。
5
测速也可以采用反射式:只要用白纸画上
黑道的圆纸贴在旋转体上即可。
其测量电路与透射式相同
调制盘
()
()
()
6
传感器应用实例
六、光传感器的应用——鼠标器
鼠标中的红外接收管就是光传感器。鼠标移动时,
滚球带动 x、y 方向两个码盘转动,红外管接收到一
安全警戒
27
扩散反射式光电开关
料位控制
烟雾报警
带材对中控制
缺料检测
28
扩散反射式光电开关
斜度检测
裂缝检测
透明玻璃瓶检测
长度控制
镜面反射式光电开关
29
限距式光电开关
产品计数
气流量监测
液位检测
检测有无盖
30
限距式光电开关
料径控制
行程控制
转速监测
超速或滞速判别
31
槽型光电开关
定长剪切
起重机位置控制
例13:条形码扫描笔
光敏三极管
发光二极管
扫描笔
条形码卡片
条形码
扫描方向
光电扫描笔
OUT
脉冲列
21
例15:大米分选机
大米及杂质
在光照下,
发出不同
光信号
放
大
器
探头 光源
振动机
控制
电路
滑槽
光箱
光传感器
杂质
驱动器
背景板
气动电磁阀
废弃箱
气源
22
例17:吸收式烟尘浊度检测仪
白炽平
行光源
感应器的工作原理

感应器的工作原理
感应器是一种能够感知外部环境并将其转化为电信号的装置,它在现代科技中扮演着非常重要的角色。
感应器的工作原理可以分为几种不同的类型,包括光电感应器、压力感应器、温度感应器等。
本文将着重介绍几种常见感应器的工作原理及其应用。
首先,光电感应器是一种能够感知光线并将其转化为电信号的装置。
它的工作原理是利用光敏元件对光线的敏感性,当光线照射到光敏元件上时,光敏元件会产生电信号。
这种感应器广泛应用于自动门、光电开关等领域,能够实现自动感应开关的功能。
其次,压力感应器是一种能够感知外部压力并将其转化为电信号的装置。
它的工作原理是利用压阻效应或压电效应,当外部施加压力时,感应器内部的电阻或电压会发生变化,从而产生相应的电信号。
这种感应器广泛应用于汽车制动系统、医疗设备等领域,能够实现对外部压力变化的感知。
另外,温度感应器是一种能够感知外部温度并将其转化为电信号的装置。
它的工作原理是利用热敏元件对温度的敏感性,当温度发生变化时,热敏元件的电阻会产生相应的变化,从而产生电信号。
这种感应器广泛应用于家用电器、空调系统等领域,能够实现对外部温度变化的感知。
总的来说,感应器的工作原理是利用各种不同的物理效应,将外部环境的变化转化为电信号。
通过对这些电信号的处理和分析,我们能够实现对外部环境的感知和控制。
随着科技的不断进步,感应器的应用范围也在不断扩大,为我们的生活带来了诸多便利。
感应器的工作原理及其应用,对于我们深入了解现代科技的发展和应用具有重要意义。
光电感应器的工作原理

光电感应器的工作原理
光电感应器是一种通过光电效应来感应光线的设备。
其工作原理如下:
1. 光电效应:光电效应是指当光线照射到金属或半导体材料上时,光子的能量被电子吸收,使得电子从原子中脱离并形成自由电子。
2. 光电二极管:光电感应器常采用光电二极管作为感光元件。
光电二极管由半导体材料构成,当光子照射到二极管的PN结时,光子能量被电子吸收,电子从价带跃迁到导带,形成电流。
3. 接收电路:光电感应器的接收电路会将光电二极管输出的微弱电流放大,并转换为可感知的信号。
根据具体的应用需求,接收电路可以采用放大器、滤波器、比较器等元件进行加工处理。
4. 判别信号:经过接收电路处理后,光电感应器会输出一个判别信号,用来表示光线的状态,如有光/无光或光线强弱等。
5. 应用场景:光电感应器在很多领域都有广泛的应用,例如自动照明系统、反光补偿摄影、防尾随感应器等。
根据具体的应用需求,还可以通过调整光电二极管的结构、材料和制作工艺等来实现不同的功能。
鼠标光电传感原理

鼠标光电传感原理随着电脑技术的快速发展,鼠标成为了人们生活中不可或缺的配件之一。
鼠标通过与计算机的连接,为用户提供了方便快捷的操作方式。
而鼠标的核心部件之一便是光电传感器。
本文将介绍鼠标光电传感的原理。
一、光电传感器基本原理光电传感器是一种能够将光信号转化为电信号的器件。
在鼠标中,光电传感器的作用是感知鼠标在平面上的移动,并将其转化为计算机能够识别的信号。
光电传感器一般由光源和光敏元件组成。
光源发出光线,而光敏元件则可以感知到光线的变化。
当鼠标在平面上移动时,光源照射在平面上的纹理上会发生改变,光敏元件会感知到这种变化。
二、光电传感器工作原理1. 光源发出光线光电传感器的光源通常是一颗发光二极管(LED)。
当鼠标接通电源后,LED会发出红光。
这种红光是人眼无法看见的红外线,因此在平常使用中看到的是鼠标的光标。
2. 光敏元件感知光信号光电传感器的光敏元件一般是感光二极管(光电二极管)。
当红外线照射在光敏二极管上时,光敏二极管会产生电信号。
产生的电信号的大小与照射到光敏二极管上的红外光强度成正比,因此鼠标能够根据电信号的强弱来判断鼠标的移动距离。
3. 信号处理与传输鼠标通过接口与计算机连接,将从光电传感器获取到的信号传输给计算机进行处理。
计算机通过对信号进行解析和计算,最终将鼠标的移动转化为屏幕上光标的移动。
三、传感器类型根据光电传感器的不同构造和工作原理,鼠标的光电传感器主要有两种类型:机械式和光学式。
1. 机械式光电传感器机械式光电传感器使用旋转编码器来感知鼠标的移动。
旋转编码器通过齿轮和编码盘的相互配合,记录下鼠标在平面上的移动距离,并将其转化为电信号。
这种传感器的优点是结构简单,成本较低,但是由于传动部件的磨损,容易出现误差。
2. 光学式光电传感器光学式光电传感器通过感知平面上的纹理变化来计算鼠标的移动距离。
当鼠标在平面上移动时,光电传感器会感知到纹理的变化,并将其转化为电信号。
这种传感器的优点是精确度高,稳定性好,但是价格相对较高。
光电感应器原理

光电感应器原理
光电感应器是一种利用光电效应的传感器,通过测量光辐射的变化来感知周围环境的光照强度。
其原理基于光电效应,即当光照射到特定材料表面时,会引起电子的跃迁,从而产生电子流。
利用这个原理,光电感应器可以将光的能量转化为电信号,并通过电路进行测量和分析。
光电感应器通常由一个光源和一个光敏元件组成。
光源发出光线,光线经过空间传播后,会被周围物体反射、散射或吸收。
其中一部分光线会经过物体表面反射回到光敏元件上。
光敏元件吸收光线后,产生电信号。
当光照强度发生变化时,光敏元件产生的电信号也会相应变化。
光敏元件一般采用的是半导体材料,常见的有光电二极管(Photodiode)、光敏电阻(Photoresistor)和光电三极管(Phototransistor)等。
这些光敏元件的特点是对不同波长、
强度的光线具有不同的敏感度,可以根据具体应用的需求选择使用。
光电感应器的工作原理是基于光照强度与光敏元件输出电信号之间的关系。
当环境光照强度变化时,光敏元件的输出电信号也会相应变化。
通过测量输出电信号的变化,可以获得环境光照强度的信息。
这样的信息可以用于光照调节、环境亮度检测、物体测距等各种应用。
光电传感器的常见故障有哪些
光电传感器的常见故障有哪些光电传感器是一种常用的非接触式传感器,它利用光电原理将被感应物体的信息转化为电信号。
因其灵敏度高、精度高、反应速度快等优点,光电传感器广泛应用于自动化控制、测量、检测等领域。
然而,光电传感器在使用过程中也会出现各种故障,本文将从以下几个方面介绍光电传感器的常见故障。
1. 光电传感器无法工作出现这种情况,可能是以下几个原因导致的:•电源故障。
检查电源是否正常,或者更换电源。
•光学元件故障。
检查传感器的光学元件,如镜片、滤光片、光纤等,是否有损坏或污染的问题,需要进行清洁或更换。
•连接线路故障。
检查连接光电传感器的线路是否接触良好,是否有断路、短路等问题。
•单元接插件故障。
检查单元接插件是否正常插上,或者更换单元接插件。
•其他器件故障。
检查其他可能存在故障的器件,如放大器、逻辑电路等。
2. 光电传感器误检/漏检误检或漏检也是光电传感器常见的故障之一。
造成误检或漏检的原因比较复杂,可能是以下几点:•光源强度不足或光源与探测器不匹配。
•目标物体的特性不适合被传感器检测,比如物体的表面颜色、形状等。
•物体与传感器的距离或位置不适当,导致信号失真或者信号太弱无法检测到。
避免这种故障的方法包括定期对传感器进行清洁、根据物体的特性选择合适的传感器、设定适当的光源强度等。
3. 光电传感器出现误报警与误检类似,误报警也是光电传感器容易出现的故障之一。
造成误报警的原因主要有以下几点:•环境光线和干扰源的影响。
传感器会受到来自外部环境的光线和电磁信号的影响而出现误报警。
•误设置参数。
传感器工作时需要设定一些参数,比如触发距离、灵敏度等,如果参数设置得不当,就会发生误报警的情况。
•传感器故障。
传感器本身出现故障也有可能导致误报警情况的发生。
避免误报警最重要的是要合理设置光电传感器的参数,保证传感器与环境的适配性。
4. 光电传感器的寿命问题光电传感器是一种电子器件,随着使用次数的增加,其性能会逐渐下降,并逐渐失去原有的灵敏度和反应速度。
光电感应器的调试方法

光电感应器的调试方法
光电感应器在现代科技中可是有着举足轻重的地位呀!那它到底该怎么调试呢?
调试光电感应器主要有以下这些步骤和需要注意的地方哦!首先要确定好感应器的安装位置,这可太关键啦,就像给运动员找对赛道一样重要!然后根据实际需求调整感应距离,这个可得小心谨慎,不能有丝毫马虎。
在调试过程中要注意避免强光干扰,不然它可就“晕头转向”啦!还有呀,要确保感应器的清洁,别让灰尘之类的“捣乱分子”影响它的发挥。
在这个调试过程中,安全性和稳定性那是必须要保证的呀!就如同建房子,根基不稳可不行。
要确保感应器不会因为一些意外情况而出现故障,从而引发安全问题。
而且稳定的工作状态才能让我们放心地使用它呀,不然三天两头出问题,那不得让人烦死呀!
光电感应器的应用场景那可真是广泛得很呢!在自动化生产线上,它就像一个不知疲倦的“小卫士”,精准地检测着每一个环节。
在智能家居中,它又能给我们带来便捷和舒适的体验。
它的优势也显而易见呀,比如反应迅速、精度高、可靠性强,这可都是它的闪光点呀!
来看看实际案例吧!在一家工厂的生产线上,光电感应器准确地检测着产品的通过情况,一旦有异常就能及时发出信号,大大提高了生产效率和产品质量。
这不就很好地展示了它的实际应用效果嘛!
光电感应器的调试真的非常重要呀,只有调试好了,它才能在各个领域大显身手,为我们的生活和工作带来便利和高效呀!。
光电测速测速原理

光电测速测速原理
光电测速是一种利用光电传感器测量物体速度的方法。
其原理是通过测量物体在空间中的移动速度,利用光电传感器接收到的光信号的变化来计算物体的速度。
具体而言,光电传感器通常由一个光源和一个光电感应器组成。
光源发出光线,光线照射在物体上并被反射回来。
光电感应器接收到反射光线,并产生相应的电信号。
当物体静止不动时,光电感应器接收到的光线强度保持相对恒定。
但当物体开始移动时,光线照射在物体上的时间和光线反射回光电感应器的时间会发生变化。
这样,光电感应器接收到的光线强度就会发生相应的变化。
通过监测光电感应器输出信号的变化情况,可以计算出物体移动的速度。
一般而言,光电测速系统会将光电感应器输出的电信号转换为数字信号,并利用计算机进行处理和分析,从而得到物体的速度数据。
光电测速具有测量精度高、反应迅速的优点,广泛应用于各种工业自动化系统、交通监控系统等领域。
它可以帮助人们实时监测物体的运动情况,实现精确控制和管理。
光电感应器原理

光电感应器原理光电感应器是一种能够将光信号转换成电信号的装置。
它由光电二极管和电路组成,可以用于测量光强度、检测物体、测量距离等应用。
在现代工业生产和科学研究中,光电感应器已经成为一种必不可少的检测手段。
光电感应器的原理是基于光电效应。
光电效应是指当光线射到金属表面时,金属表面的电子会被激发出来,形成电子流。
这个过程需要光子的能量大于金属表面的电离能,才能发生。
光电效应的发现是爱因斯坦在1905年提出的,他的理论解释了光电效应的本质,为研究光电感应器奠定了基础。
光电感应器的核心部件是光电二极管。
光电二极管是一种半导体器件,它的结构类似于普通的二极管,但是在PN结上面还有一层光敏层。
当光线照射到光敏层时,光子会被吸收,产生电子和空穴,电子会被向外引出,形成电流。
这个电流的大小与光线的强度成正比,因此可以用来测量光线的强度。
光电感应器的工作原理可以分为两种:直接光电效应和间接光电效应。
直接光电效应是指光线直接照射到光电二极管上,产生光电流。
间接光电效应是指光线照射到物体上,物体反射光线到光电二极管上,产生光电流。
两种效应都可以用来检测物体,但是直接光电效应对光线的要求更高,灵敏度更高。
光电感应器的应用非常广泛。
在自动化生产中,光电感应器可以用来检测物体的位置、形状、颜色等信息,实现自动化控制。
在科学研究中,光电感应器可以用来测量光强度、测量距离、探测微弱信号等。
在医疗领域中,光电感应器可以用来检测血氧饱和度、心率等生理信号。
总之,光电感应器是一种非常重要的光电器件,它的原理基于光电效应,可以将光信号转换成电信号,应用广泛,具有重要的意义。
位置感应器工作原理

位置感应器工作原理
位置感应器是一种能够检测和测量物体或个体在空间中的位置和运动的装置。
它基于不同的工作原理来实现位置的感知和测量。
以下是一些常见的位置感应器的工作原理:
1. 光电感应器: 光电感应器利用光电元件(如光敏二极管或光
敏电阻)来感知物体的位置。
当物体遮挡光线时,光电元件的电阻或电压值会发生变化,从而可以检测出物体的位置。
2. 磁感应器: 磁感应器利用磁场的变化来感知物体的位置。
它
包括磁敏元件(如磁敏电阻或霍尔元件)和一个或多个磁场源。
当物体靠近或远离磁敏元件时,其电阻或输出信号的数值会发生变化,从而实现位置的检测。
3. 超声波感应器: 超声波感应器利用超声波的反射原理来测量
物体的位置。
它发射出超声波信号,并接收由物体反射回来的信号。
通过计算超声波的传播时间,可以确定物体的位置。
4. 惯性感应器: 惯性感应器基于物体的惯性原理来感知物体的
位置和运动。
其中最常见的是加速度计和陀螺仪。
加速度计可以测量物体在三个轴向上的加速度,从而得知位置的变化;陀螺仪可以测量物体的角速度,用于检测物体的旋转。
这些位置感应器的工作原理各有优势和适用范围,可以根据具体的应用需求选择合适的位置感应器。
它们在自动化控制、机器人技术、汽车导航等领域中得到广泛应用。
RightSight M30 光电感应器系列产品说明书
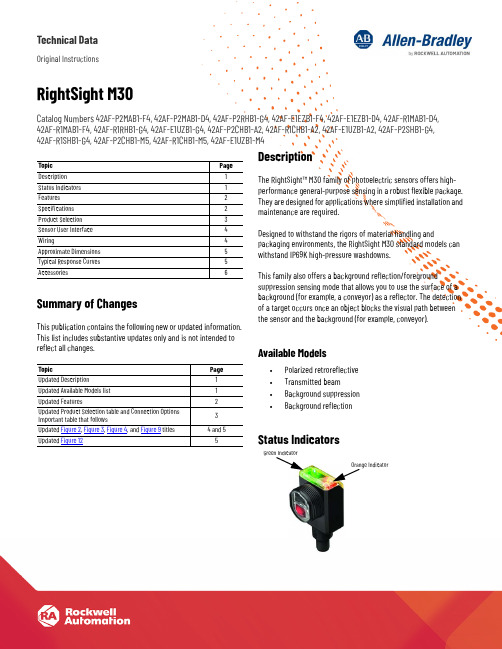
Technical DataOriginal InstructionsRightSight M30Catalog Numbers 42AF-P2MAB1-F4, 42AF-P2MAB1-D4, 42AF-P2RHB1-G4, 42AF-E1EZB1-F4, 42AF-E1EZB1-D4, 42AF-R1MAB1-D4,42AF-R1MAB1-F4, 42AF-R1RHB1-G4, 42AF-E1UZB1-G4, 42AF-P2CHB1-A2, 42AF-R1CHB1-A2, 42AF-E1UZB1-A2, 42AF-P2SHB1-G4,42AF-R1SHB1-G4, 42AF-P2CHB1-M5, 42AF-R1CHB1-M5, 42AF-E1UZB1-M4Summary of ChangesThis publication contains the following new or updated information.This list includes substantive updates only and is not intended toreflect all changes.DescriptionThe RightSight™ M30 family of photoelectric sensors offers high-performance general-purpose sensing in a robust flexible package.They are designed for applications where simplified installation andmaintenance are required.Designed to withstand the rigors of material handling andpackaging environments, the RightSight M30 standard models canwithstand IP69K high-pressure washdowns.This family also offers a background reflection/foregroundsuppression sensing mode that allows you to use the surface of abackground (for example, a conveyor) as a reflector. The detectionof a target occurs once an object blocks the visual path betweenthe sensor and the background (for example, conveyor).Available Models•Polarized retroreflective•Transmitted beam•Background suppression•Background reflectionStatus IndicatorsTopic PageDescription1Status Indicators1Features2Specifications2Product Selection3Sensor User Interface4Wiring4Approximate Dimensions5Typical Response Curves5Accessories6Topic PageUpdated Description1Updated Available Models list1Updated Features2Updated Product Selection table and Connection OptionsImportant table that follows3Updated Figure2, Figure3, Figure4, and Figure9 titles 4 and 5Updated Figure125Orange IndicatorGreen Indicator2Rockwell Automation Publication 42AF-TD001B-EN-P - June 2020RightSight M30 Technical DataFeatures•Maximum sensing distance-Background suppression without physicaladjustments (a): 400 mm (15.7 in.) and 600 mm (23.6 in.)-Background suppression with push button teach (a): 1.2 m (3.94 ft)-Background reflection with push button teach (a): 800 mm (31.5 in.)-Polarized retroreflective:10 m (32.8 ft) with 92-125 reflector -Transmitted beam:80 m (262.5 ft)•High powered light source for ease of alignment•360° highly visible user interface helps operators verify the proper operation, regardless of the sensor installation location•Background suppression performance helps minimize false detections due to highly reflective backgrounds•Dual Auto PNP/NPN helps streamline inventory by reducing the number of catalog numbers to stock•Push button lock helps prevent unauthorized operators from changing the sensor settings•Embedded IO-Link 1.1 communications protocol•Adjustable sensing ranges and response time via IO-Link provides additional flexibility to detect targets at longer or shorter distances depending on the application requirements.•IP67 and IP69K rated enclosure.Specifications(a)All models can be taught to detect targets up to 4 m (13.1 ft.) when using IO-Link to adjustthe response timeAttribute ValueCertifications c-UL-us and CE Marked for all applicable directivesVibration 10…55 Hz, 1 mm (0.04 in.) amplitude, meets, or exceeds 60947-5-2Shock30 g (1.1 oz) with 1 ms pulse duration per IEC 60947-5-2Ambient light immunity •Direct Illumination: 20,000 lux•Indirect Illumination: 5000 lux•Sunlight immunity; 108,000 lux User Interface Status indicators Green and orange light-emitting diodes (LED)Electrical Adjustments No physical adjustment. IO-Link adjustable Operating voltage •DC models: 10...30V DC, IO-Link: 18 (30V)•AC/DC models: AC: 24…250V AC/DC: 20…250V DC Current consumption 35 mA maxSensor protection DC: Reverse polarity and short circuit; AC/DC: Reverse polarity Discrete Output Response time •DC: 1 ms•AC/DC: 15 ms max Output type •DC: Dual Auto PNP or NPN •AC/DC: EM RelayLoad current •DC: 100 mA max•AC/DC SPDT: 10…30V DC: 3 A; 31…125V DC: 200 mA;24…250V AC: 3 AIO-LinkCommunications mode COM2Cycle time, min 2 ms Process data bit length 32 bits (4 bytes)Specifications 1.1Mechanical Housing material PBT Lens material PMMA Cover material Polysulfone Reliability DataTransmitted Beam and Polarized Retroreflective AC/DC MTTFd (hours)6548788.474T10d78.76Transmitted Beam and Polarized Retroreflective DC MTTFd (hours)9310986.965T10d111.9875Transmitted Beam Emitter AC/DC MTTFd (hours)24271844.66T10d291.9285467Transmitted Beam Emitter DC MTTFd (hours)24271844.66T10d 291.9285467Environmental Enclosure type ratingIP67 and IP69K per ISO 20653 rated enclosureOperating temperature -40…+70 °C (31…158 °F) (1)(1)The sensing range for all sensing modes can be reduced up to 20% when operatedbetween -40…-25 °C (-40…-13 °F).Connection type • 2 m (6.5 ft) cable •4-pin Integral M12 QD•4-pin M12 QD on a 150 mm (5.9 in.) pigtail•4-pin mini QD on 150 mm (5.9 in.) pigtail •5-pin mini QD on 150 mm (5.9 in.) pigtailRockwell Automation Publication 42AF-TD001B-EN-P - June 20203RightSight M30 Technical DataProduct SelectionSee https:///Sensors-Switches/Photoelectric-Sensors for additional details about the operation of the RightSight M30 in IO-Link mode.Sensing Mode Operating Voltage Light SourceSensing DistanceSensitivity Adjustment Output Function Output Type Cat. No.Background Suppression10...30V DC InfraredDefault setting:10...400 mm (0...15.7 in.)No physical adjustment. IO-Link teach: 4 m (13.1 ft) (1)(1)Sensor response time can be changed up to 75 ms to achieve distance of up to 4 m (13.1 ft). A higher distance between target and high reflectivity background may be needed whenoperating the sensors at distances greater than 2 m (6.6 ft).Light and dark operate Dual autoPNP or NPN42AF-B1MAB1-D4Default setting:10...600 mm (0...23.6 in.)No physical adjustment. IO-Link teach: 4 m (13.1 ft) (1)42AF-B1MAB2-D4Default setting:10...1.2 m (0...3.9 ft)Push button teach: 3 m (9.8 ft) IO-Link teach: 4 m (13.1 ft) (1)42AF-B1MAC1-D4Background Reflection10...30V DC Infrared0...800 mm (0...31.5 in.)Push button teach: 3 m (9.8 ft) IO-Link teach: 4 m (13.1 ft) (1)Light and dark operate Dual auto PNP or NPN 42AF-N1MAC1-D4Polarized Retroreflective10...30V DCVisible red0.025...10 m (0.03...33 ft)with 92-125 reflector No adjustment (IO-Link adjustable)Light and dark operate Dual auto PNP or NPN42AF-P2MAB1-D420...250V DC 24...250V AC No adjustment Light operate SPDT EM relay 42AF-P2RHB1-G4Dark operate 42AF-P2SHB1-G4Light and dark operate42AF-P2CHB1-A2Transmitted Beam10...30V DC Infrared0...80 m (0...262 ft)No adjustment (IO-Link adjustable)Transmitted beam emitter —42AF-E1EZB1-D420...250V DC 24...250V AC42AF-E1UZB1-G410...30V DC No adjustmentLight and dark operate Dual auto PNP or NPN 42AF-R1MAB1-D420...250V DC 24...250V ACLight operate SPDT EM relay42AF-R1RHB1-G4Dark operate 42AF-R1SHB1-G4Light and dark operate42AF-R1CHB1-A2IMPORTANTConnection Options (1): The following suffixes describe the available connection options:•D4: Describes an integral 4-pin DC micro (M12) quick-disconnect for DC models.•G4: Describes a 4-pin AC micro (M12) quick-disconnect on a 150 mm (6 in.) length pigtail on AC/DC models.•F4: Describes a 4-pin DC micro (M12) quick-disconnect on a 150 mm (6 in.) length pigtail on DC models.•A2: Describes a 2 m (6.6 ft) PVC cable.•M4: Describes a 4-pin mini quick-disconnect on a 150 mm (6 in.) length pigtail. Transmitted beam emitter only.•M5: Describes a 5-pin mini quick-disconnect on a 150 mm (6 in.) length pigtail on AC/DC models. Polarized retroreflective and transmitted beam receivers only.(1)Additional connection options may be available. See the ProposalWorks™ tool for available options by sensing mode.Table 1 - Standard I/O (Auto PNP/NPN) Operating Mode IndicationColorStatus Description GreenOFF Power is off ON Power is onFlash (6 Hz)Unstable light: 0.8 X <margin<1.5X Flash (1.4 Hz)Output short circuit protection active OrangeOFF Output de-energized ONOutput energizedTable 2 - IO-Link Operating Mode IndicationColor Status Description Green OFF Power is off Flash (1 Hz)Power is onOrangeOFF Output de-energized ONOutput energized4Rockwell Automation Publication 42AF-TD001B-EN-P - June 2020RightSight M30 Technical DataSensor User InterfaceThe green status indicator can also serve as a setup alignment aid. As the sensor is adjusted, • A flashing green indicator shows that the sensor has detected a margin of 0.8 X• A flashing green indicator and steady orange output indicator shows a margin greater than 1•Steady green and orange indicators show a margin greater than 1.5. This status means that the sensor is receiving at least 1.5 times the signal strength back from the target that is required to trigger an output signal.In general, it is desirable to have a higher margin to help overcome any deteriorating environmental conditions (dust build-up on the sensor lens). When aligning the sensor, the optimum performance can be obtained if this margin indicator is illuminated with the target in place.Table 3 provides indicator status in the RUN mode, during operation. The sensor is always in run mode except when being taught.WiringThe quick-disconnect connector is shown in Figure 1. The pin numbers correspond to the male connectors on the sensor.Figure 1 - PinoutsDC ModelsFigure 2 - Polarized Retroreflective(42AF-P2MAB1-F4 and 42AF-P2MAB1-D4)Light Operate and Dark Operate (Auto PNP or NPN)Figure 3 - Transmitted Beam Receiver (42AF-R1MAB1-F4 and 42AF-R1MAB1-D4)Light Operate and Dark Operate (Auto PNP or NPN)Figure 4 - Transmitted Beam Emitter (42AF-E1EZB1-F4 and 42AF-E1EZB1-D4)Table 3 - Connection TypesDescriptionCat. No. Suffix2 m (6.56 ft) cable-A24-pin DC micro (M12) QD on 150 mm (6 in.) pigtail -F4Integral 4-pin DC micro (M12) QD-D44-pin AC micro on 150 mm (6 in.) pigtail -G44-pin mini QD on 150 mm (6 in.) pigtail -M45-pin mini QD on 150 mm (6 in.) pigtail-M5Item DescriptionLED Disable For normal operation, the white wire needs no connection.To disable the light source, connect the white wire to +V.Frequency SelectFor normal operation, the white wire needs no connection.To change the emitter operating frequency, connect the black wire to +V. This feature is supported in future firmware revisions of the Transmitted Beam Receiver.IMPORTANTFor transmitted beam emitter only:Do not connect pin 2 and pin 4 for normaloperation. Unless a change in frequency is required when working with a receiver, these two pins remain unconnected when wiring the transmitted beam emitter sensor to anArmorBlock® I/O module.4-pin Micro (M12)Brown (1)Blue (3)Black (4)White (2)+V-VLight Operate (Auto PNP/NPN)Dark Operate (Auto PNP/NPN)Brown (1)Blue (3)Black (4)White (2)+V-VLight Operate (Auto PNP/NPN)Dark Operate (Auto PNP/NPN)Brown (1)Blue (3)Black (4)White (2)+V-VFrequency Select LED DisabledRockwell Automation Publication 42AF-TD001B-EN-P - June 20205RightSight M30 Technical DataAC/DC ModelsFigure 5 - Polarized Retroreflective and Transmitted Beam Emitter Light Operate (42AF-P2RHB1-G4 and 42AF-R1RHB1-G4)Figure 6 - Dark Operate(42AF-P2SHB1-G4 and 42AF-R1SHB1-G4)Figure 7 - Polarized Retroreflective and Transmitted Beam (42AF-P2CHB1-A2 and 42AF-R1CHB1-A2)Figure 8 - Polarized Retroreflective and Transmitted Beam (42AF-P2CHB1-M5 and 42AF-R1CHB1-M5)Figure 9 - Transmitted Beam Emitter (42AF-E1UZB1-A2 and 42AF-E1UZB1-G4)Approximate DimensionsFigure 10 - Integral M12 Connector [mm (in.)]Figure 11 - M12 Pigtail and Cable Models [mm (in.)]Typical Response CurvesFigure 12 - Visible Red Polarized Retroreflective — 10 m (32.81ft) Margin CurveFigure 13 - Visible Red Polarized Retroreflective — 10 m (32.81ft) Beam PatternTable 4 - UL508 Overcurrent ProtectionConductor Size Ampere Rating of the Overcurrent Protection, MaxAWG mm 2200.525220.323240.202260.131280.080.8300.050.5Red w/Black (1)Green (3)Red (4)Red w/White (2)(-V) L2(No Connection)Light Operate (+V) L1Red w/Black (1)Green (3)Red (4)Red w/White (2)(-V) L2(No Connection)Light Operate (+V) L1(+)˜(-)˜(+)˜(-) ˜Red w/Black (1)Not Used (3)Not Used (4)Red w/White (2)(-V) L2(+V) L1Sensing Distance [m (ft)]O p e r a t i n g M a r g i n 0.01(0.03)0.1(0.33)1(3.28)10(32.81)01020304050607080(13.12)(19.68)(26.25)(32.81)(39.37)Distance [m (ft)]D i s t a n c e [c m ](6.56)6Rockwell Automation Publication 42AF-TD001B-EN-P - June 2020RightSight M30 Technical DataFigure 14 - Infrared Transmitted Beam Emitter — 80 m (262.5ft) Margin CurveFigure 15 - Infrared Transmitted Beam Emitter — 80 m (262.5ft) Beam PatternAccessoriesFigure 16 - 30 mm (1.2 in.) Right Angle Mounting BracketFigure 17 - 18 mm (0.7 in.) Swivel/Tilt Mounting BracketCat. No. 60-2421Cat. No. 60-2439IMPORTANTFor polarized retroreflective sensors only: For optimal detection performance, when highly reflective targets pass between the emitter and the reflector, we recommend that you always install the rubber washer that is provided with the polarized sensor.(0.33)(3.28)(32.81)(328.08)Sensing Distance [m (ft)]O p e r a t i n g M a r g in(13.12)(19.68)(26.25)(32.81)(39.37)Distance [m (ft)]D i s t a n c e [c m ](6.56)Cat. No. 60-2649Cat. No. 60-2681DescriptionCat. No.4-pin DC micro, 2 m (6.5 ft) cordset 889D-F4AC-218 mm (0.7 in.) straight bracket 60-265618 mm (0.7 in.) right angle bracket60-265730 mm (1.2 in.) stainless steel mounting bracket 60-242130 mm (1.2 in.) swivel/tilt bracket 60-243918 mm (0.7 in.) swivel/tilt bracket60-2649Extended 18 mm (0.7 in.) swivel/tilt bracket 60-268176 mm (3 in.) diameter reflector 92-3947 mm (1.85 in.) diameter reflector 92-4784 mm (3.3 in.) diameter reflector92-12518 mm (0.7 in.) base mount, U-shaped protective bracket 60-BAF-US 18 mm (0.7 in.) base mount bracket, stainless steel 60-BAF-BM 30 mm (1.2 in.) nose mount bracket, stainless steel60-BAF-SM Aperture, 5 x 17 mm (0.2 x 0.67 in.) vertical slot, stainless steel 60-AAF1-VS Aperture, 5 x 12 mm (0.2 x 0.47 in.) horizontal slot, stainless steel 60-AAF1-HS Aperture, 2.5 x 12 mm (0.1 x 0.47 in.) horizontal slot, stainless steel 60-AAF2-HS Aperture, 5 mm (0.2 in.) diameter, stainless steel 60-AAF1-DS Aperture, 2.5 mm (0.1 in.) diameter, stainless steel 60-AAF2-DS U-shaped protective bracket60-BAF-US 18 mm (0.7 in.) base mount bracket, stainless steel 60-BAF-BM 30 mm (1.2 in.) nose mount bracket, stainless steel60-BAF-SM Aperture, 5 x 17 mm (0.2 x 0.67 in.) vertical slot, stainless steel 60-AAF1-VS Aperture, 5 x 12 mm (0.2 x 0.47 in.) horizontal slot, stainless steel 60-AAF1-HS Aperture, 2.5 x 12 mm (0.1 x 0.47 in.) horizontal slot, stainless steel 60-AAF2-HS Aperture, 5 mm (0.2 in.) diameter, stainless steel 60-AAF1-DS Aperture, 2.5 mm (0.1 in.) diameter, stainless steel60-AAF2-DSRockwell Automation Publication 42AF-TD001B-EN-P - June 20207RightSight M30 Technical DataFigure 18 - AperturesFigure 19 - Cat. No. 60-BAF-US 18 mm (0.7 in.) Mounting BracketFigure 20 - Cat. No. 60-BAF-SM 30 mm (1.2 in.) Bracket SideFigure 21 - Cat. No. 60-BAF-BM 18 mm (0.7 in.) Bracket BackCat. No. 60-AAF1-VS 5x17 mm (0.2x0.67 in.)Vertical SlotCat. No. 60-AAF1-HS 5x12 mm (0.2x0.47 in.) Horizontal SlotCat. No. 60-AAF2-HS 2.5x12 mm (0.1x0.47 in.)Horizontal SlotCat. No. 60-AAF1-DS 5 mm (0.2 in.) DiameterCat. No. 60-AAF2-DS 2.5 mm (0.1 in.)DiameterØØ4.5018.49 (0.73)(0.33)12.7 (0.50)33.02 (1.30)6.98(0.27)2 x 1.84 (0.07)9.73(0.38)2 x Ø 4.5 (0.18)12.7(0.50)4 x 4.57(0.18)6.35(0.25)22.2(0.87)22.86 (0.90)Ø 30.15 (1.19)3.17(0.12) Ref19.05 (0.75)44.45 ± 0.25(1.75 ± 0.01)0.79(0.03) Ref90°2 x 82°R 2.29(0.09)2 x 0.77 (0.03)45.72 (1.80)2 x Ø 3.83 (0.15)2 x 1.75 (0.06)17.78(0.70)30.48 (1.20)3.17(0.12) Ref2 x 0.79(0.31)15.16(0.60)90°2 x 82°R 2.29(0.09)Ø 18.49(0.73)8.89 (0.35)9.27 (0.36)6.98(0.27)8.25(0.32)8.89(0.35)19.05 (0.75)4 x R 4.57 (0.18)35.56 (1.40)30.48(1.20)0.79(0.03) RefPublication 42AF-TD001B-EN-P - June 2020Supersedes Publication 42AF-TD001A-EN-P - January 2019Copyright © 2020 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.Rockwell Automation SupportUse these resources to access support information.Documentation FeedbackYour comments help us serve your documentation needs better. If you have any suggestions on how to improve our content, complete the form at rok.auto/docfeedback .Waste Electrical and Electronic Equipment (WEEE)Technical Support Center Find help with how-to videos, FAQs, chat, user forums, and product notification updates.rok.auto/support KnowledgebaseAccess Knowledgebase articles.rok.auto/knowledgebase Local Technical Support Phone Numbers Locate the telephone number for your country.rok.auto/phonesupport Literature LibraryFind installation instructions, manuals, brochures, and technical data publications.rok.auto/literature Product Compatibility and Download Center (PCDC)Get help determining how products interact, check features and capabilities, and find associated firmware.rok.auto/pcdcAt the end of life, this equipment should be collected separately from any unsorted municipal waste.Rockwell Automation maintains current product environmental information on its website at rok.auto/pec .Allen-Bradley, ArmorBlock, expanding human possibility, ProposalWorks, RightSight, Rockwell Automation, and Rockwell Software are trademarks of Rockwell Automation, Inc.Trademarks not belonging to Rockwell Automation are property of their respective companies.Rockwell Otomasyon Ticaret A.Ş. Kar Plaza İş Merkezi E Blok Kat:6 34752, İçerenkÖy, İstanbul, Tel: +90 (216) 5698400 EEE YÖnetmeliğine Uygundur。
手机光感应器原理

手机光感应器原理
手机光感应器原理是指手机中的光线传感器通过感知周围环境中的光线强度来调节屏幕亮度的技术。
光感应器一般位于手机的顶部或者屏幕上方,通过使用光敏电阻、光敏二极管或者光敏三极管等感光元件来实现。
光感应器的工作原理主要基于光电效应,即当光照在感光元件上时,会引起感光元件内部的电荷分布产生改变,进而产生电压信号。
手机的光感应器通过测量这个电压信号的大小来判断周围环境中的光线强度。
当光线强度较弱时,光感应器会感知到较低的电压信号,此时手机会降低屏幕亮度,以节省电池的能量消耗。
相反,当光线强度较强时,光感应器会感知到较高的电压信号,此时手机会增加屏幕亮度,以提供更好的视觉体验。
光感应器的原理使得手机能够根据不同的环境光线强度来自动调节屏幕亮度,使得用户在不同的场景下都能有良好的视觉效果,并且能够延长手机的续航时间。
同时,光感应器也可以用于其他功能的实现,比如根据光线强度自动调节摄像头曝光度,或者在黑暗环境下开启夜间模式等。
总结来说,手机光感应器的原理是基于光电效应,通过感知周围环境的光线强度来自动调节屏幕亮度,提供更好的用户体验和更高的能效。
光电感应传感器工作原理

光电感应传感器工作原理光电感应传感器是一种利用光辐射与物体的相互作用原理来检测和测量物体位置、形态的传感器。
其工作原理基于光电效应和光电导效应,通过探测光的传感器部件来检测物体的存在、位置和形状。
下面将详细介绍光电感应传感器的工作原理。
光电效应是指光辐射射到物体表面时,光子对物体表面的电子产生相互作用,将光能转化为电能或热能的现象,其中最为常见的是光电子效应。
光电子效应是指当光照射到一些金属或半导体物质上时,光子能量足够高时,光子与金属表面的原子碰撞,将金属的一个电子带出金属,形成自由电子,此时产生电流。
光电子效应的基本原理使得光电感应传感器能够通过探测光的传感器部件来检测物体的存在。
光电导效应是指一些材料在光照射下,会产生电导率的变化。
这是由于光的能量和频率使得当光射到物体中时,光子的能量足够高,能够使得物体内的电子能级发生变化,从而改变材料的电导特性。
光电导效应是光电感应传感器中常常利用的原理之一光电感应传感器一般由光源、光电片、电路板和输出装置等部件组成。
当光源照射光线到传感器上时,光线被光电片接收。
光电片通常由光电二极管和光电三极管等传感器件组成。
光电二极管是一种半导体器件,当光照射到光电二极管的PN结上时会产生电流,该电流大小与光照的强弱成正比。
光电三极管是一种包括P型、N型和光敏部分的器件,光照射到光电三极管时,使得光电三极管的电导率发生变化,从而改变其电流输出。
在光电感应传感器中,光电片接收到的光线信号会通过电路板上的电路进行放大和处理,最终输出一个电信号,该电信号可以用来检测物体是否存在、物体的位置或形状等。
通常可以通过调整光源的角度、光电片的灵敏度和滤光片的使用等方式来控制传感器的灵敏度和工作范围。
光电感应传感器具有很多应用领域,例如在工业自动化领域中,可以用来检测物体的位置、形状和颜色等信息,实现自动化生产;在安全监控领域中,可以用来检测人员和车辆的进入和离开,保障安全;在交通领域中,可以用来检测车辆的进入和离开,实现交通流量统计等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光电传感器光电传感器的定义「光电传感器」是利用光的各种性质,检测物体的有无和表面状态的变化等的传感器。
光电传感器主要由发光的投光部和接受光线的受光部构成。
如果投射的光线因检测物体不同而被遮掩或反射,到达受光部的量将会发生变化。
受光部将检测出这种变化,并转换为电气信号,进行输出。
大多使用可视光(主要为红色,也用绿色、蓝色来判断颜色)和红外光。
光电传感器如下图所示主要分为3类。
(详细内容请参见「分类」)对射型回归反射型扩散反射型光电传感器特长①检测距离长如果在对射型中保留10m以上的检测距离等,便能实现其他检测手段(磁性、超声波等)无法离检测。
达到的长距②对检测物体的限制少由于以检测物体引起的遮光和反射为检测原理,所以不象接近传感器等将检测物体限定在金属,它可对玻璃.塑料.木材.液体等几乎所有物体进行检测。
③响应时间短光本身为高速,并且传感器的电路都由电子零件构成,所以不包含机械性工作时间,响应时间非常短。
④分辨率高能通过高级设计技术使投光光束集中在小光点,或通过构成特殊的受光光学系统,来实现高分辨率。
也可进行微小物体的检测和高精度的位置检测。
⑤可实现非接触的检测可以无须机械性地接触检测物体实现检测,因此不会对检测物体和传感器造成损伤。
因此,传感器能长期使用。
⑥可实现颜色判别通过检测物体形成的光的反射率和吸收率根据被投光的光线波长和检测物体的颜色组合而有所差异。
利用这种性质,可对检测物体的颜色进行检测。
⑦便于调整在投射可视光的类型中,投光光束是眼睛可见的,便于对检测物体的位置进行调整。
光电传感器原理①光的性质直射光在空气中和水中时,总是直线传播。
使用对射型传感器外置的开叉来检测微小物体的示例便是运用了这种原理。
曲折是指光射入到曲折率不同的界面上时,通过该界面后,改变行进方向的现象。
反射(正反射、回归反射、扩散反射)在镜面和玻璃平面上,光会以与入射角相同的角度反射,称为正反射。
3个平面互相直角般组合的形状称为三面直角棱镜。
如果面向三面直角棱镜投光,将反复进行正反射,最终的反射光将向投光的反方向行进。
这样的反射称为回归反射。
多数的回归反射板都是由数mm角的三面直角棱镜按规律排列而构成的。
此外,在白纸等没有光泽性的表面上,光线将向各个方向反射,这样的反射称为扩散反射。
扩散反射型将该原理作为检测方式。
偏光光线可以表现为与其行进方向垂直的振动波。
作为光电传感器的光源,主要使用LED。
从LED投射的光线,会在与行进方向垂直的各个方向上振动,这种状态的光称为无偏光。
将无偏光的光的振动方向限制在一个方向上的光学过滤器称为偏光过滤器。
即从LED投光,并通过偏光过滤器的光线只在一个方向上振动,这种状态称为偏光(正确地说应为直线偏光)。
在某一方向(例如纵方向)上振动的偏光,无法通过限制在其垂直方向(横方向)上振动的偏光过滤器。
回归反射型的M.S.R功能(→③M.S.R.功能(Mirror Surface Rejection:镜面体光泽清除)页)和作为对射型配件的防止相互干扰过滤器就是应用了这种原理。
②光源光的点亮方式〈脉冲变调光〉多数光电传感器采用脉冲变调光,基本以一定周期反复投光。
由于很容易排除杂乱光的影响,所以可以实现长距离检测。
在带防止相互干扰功能的类型中,投光的周期会根据干扰光和杂乱光而在一定范围内变化。
〈直流光〉是连续投射一定光量的光线,在标记传感器等部分机型中使用。
能得到高速响应性,但有检测距离短,容易受杂乱光影响等缺点。
光源色与种类③光纤型构造由于检测部(光纤)中完全没有电气部分,所以耐干扰等耐环境性良好。
E3X-DA-S(数字放大器)检测原理光纤由中间的核心和外围部分曲折率较小的外包金属构成。
如果光线入射到核心部分,光线将会在与外包金属的交界面上一边反复进行全反射,一边行进。
通过光纤内部从端面发出的光线以约60°的角度扩散,照射到检测物体上。
柔软型(多核心)(中间的素线固定) 很少因弯曲造成光量变动容许弯曲半径:标准型单芯光的传输效果好测距离较长容许弯曲半径R25mm耐弯曲型(束)(中间的素线分散)耐曲折性良好反复弯曲次数次以上(代表例)容许弯曲半径:④三角测距距离设定型光电传感器主要以三角测距为检测原理。
下图所示的是三角测距的原理。
从投光元件投射的光线将在检测物体上扩散反射。
反射光将通过受光透镜在位置检测元件(输出符合光线位置信号的半导体元件)上成像。
检测物体在靠近光学系统的位置A的情况下,反射光会在位置检测元件的a位置上成像。
在离光学系统较远的位置B的情况下,反射光将在b位置上成像。
因此,通过测定位置检测元件上的成像位置,可以检测与检测物体的距离。
光电传感器分类①按检测方式分类(1)对射型检测方式为了使投光器发出的光能进入受光器,对向设置投光器与受光器。
如果检测物体进入投光器和受光器之间遮蔽了光线,进入受光器的光量将减少。
掌握这种减少后便可进行检测。
此外,检测方式与对射型相同,在传感器形状方面,也有投光受光部一体化,称为槽形的种类。
特长:动作的稳定度高,检测距离长。
(数cm~数十m)即使检测物体的通过线路变化,检测位置也不变。
检测物体的光泽?颜色?倾斜等的影响很少。
(2)扩散反射型检测方式在投受光器一体型中,通常光线不会返回受光部。
如果投光部发出的光线碰到检测物体,检测物体反射的光线将进入受光部,受光量将增加。
掌握这种增加后,便可进行检测。
特长:检测距离为数cm~数m。
便于安装调整。
在检测物体的表面状态(颜色、凹凸)中光的反射光量会变化,检测稳定性也变化。
(3)回归反射型检测方式在投受光器一体型中,通常投光部发出的光线将反射到相对设置的反射板上,回到受光部。
如果检测物体遮蔽光线,进入受光部的光量将减少。
掌握这种减少后,便可进行检测。
特长检测距离为数cm~数m。
布线.光轴调整方便(可节省工时)。
检测物体的颜色、倾斜等的影响很少。
光线通过检测物体2次,所以适合透明体的检测。
检测物体的表面为镜面体的情况下,根据表面反射光的受光不同,有时会与无检测物体的状态相同,无法检测。
这种影响可通过MSR功能来防止。
(4)距离设定型检测方式作为传感器的受光元件,使用2比例光电二极管或位置检测元件。
通过检测物体反射的投光光束将在受光元件上成像。
这一成像位置以根据检测物体距离不同而差异的三角测距原理为检测原理。
下图所示的是使用2比例光电二极管的检测方式。
2比例光电二极管的一端(接近外壳的一侧)称为N(Near)侧,而另一端称为F(Far)侧。
检测物体存在于已设定距离的位置上的情况下,反射光将在N侧和F侧的中间点成像,两侧的二极管将受到同等的光量。
此外,相对于设定距离,检测物体存在于靠近传感器的位置的情况下,反射光将在N侧成像。
相反的,相对于设定距离,检测物体存在于较远的位置的情况下,反射光将在F侧成像。
传感器可通过计算N侧与F侧的受光量差来判断检测物体的位置。
距离设定型的特长受检测物体的表面状态?颜色的影响少。
不易受背景物体的影响。
BGS(Background Suppression)和FGS(Foreground Suppression)在E3Z-LS61/-66/-81/-86中,检测传输带上物体的情况下,可选择BGS和FGS两种功能中的任何一个。
BGS是不会对比设定距离更远的背景(传输带)进行检测的功能。
FG是不会对比设定距离更近的物体,以及回到受光器的光量少于规定的物体进行检测的功能,反言之,是只对传输带进行检测的功能。
回到受光器光量少的物体是指:①检测物体的反射率极低,比黑画纸更黑的物体。
②反射光几乎都回到投光侧,如镜子等物体。
③反射光量大,但向随机方向发散,有凹凸的光泽面等物体。
注:③的情况下,根据检测物体的移动,有时反射光会暂时回到受光侧,所以有时需要通过OFF 延迟定时器来防止高速颤动。
特长可对微小的段差进行检测(BGS、FGS)。
不易受检测物体的颜色影响(BGS、FGS)。
不易受背景物体的影响(BGS)。
有时会受检测物体的斑点影响(BGS、FGS)。
(5)限定反射型检测方式与扩散反射型相同,接受从检测物体发出的反射光进行检测。
设置为在投光器和受光器上仅入射正反射光,仅对离开传感器一定距离(投光光束与受光区域重叠的范围)的检测物体进行检测。
下图中,可在(A)位置检测物体,但在(B)位置无法检测。
特长可检测微妙的段差。
限定与传感器的距离,只在该范围内有检测物体时进行检测。
不易受检测物体的颜色的影响。
不易受检测物体的光泽、倾斜的影响。
②按检测方式选择点对射型/回归反射型的确认事项检测物体1.大小、形状(纵×横×高)2.透明度(不透明体|半透明体|透明体)3.移动速度V(m/s或个/分)传感器1.检测距离(L)2.形状?大小的限制a)传感器b)回归反射板(回归反射型的情况下)3.有无多个紧密安装a)台数b)安装间距c)是否可以交错安装4.安装的限制(是否需要角度等)环境1.环境温度2.有无水、油、药品等飞散3.其他扩散反射型、距离设定型、限定反射型的确认事项检测物体1.大小?形状(纵×横×高)2.颜色3.材料(铁、SUS、木、纸等)4.表面状态(粗糙、有光泽)5.移动速度V(m/s或个/分)传感器1.检测距离(与工件之间的距离)(L)2.形状、大小的限制3.有无多个紧密安装a)台数b)安装间距4.安装的限制(是否需要角度等)背景1.颜色2.材料(铁、SUS、木、纸等)3.表面状态(粗糙、有光泽等)环境1.环境温度2.有无水、油、药品等飞散3.其他③按构成分类光电传感器通常由投光部、受光部、增幅部、控制部、电源部构成,按其构成状态可分为以下几类。
(1)放大器分离型仅投光部和受光部分离,分别作为投光部和受光部(对射型)、或一体的投受光器(反射型)。
其他的增幅部、控制部采用一体的放大器单元形。
特长投受光器仅由投光元件、受光元件及光学系统构成,所以可以采用小型。
即使在狭小的场所设置投、受光器,也可在较远的场所调整灵敏度。
投?受光部与放大器单元间的信号线很容易受干扰。
代表机型(放大器单元):E3C-LDA、E3C(2)放大器内置型除电源部以外为一体。
(对射型分为包括投光部的投光器和包括受光部、增幅部、控制部的受光器两种)。
电源部单独采用电源单元等形状。
特长由于受光部、增幅部、控制部为一体,所以不需要围绕微小信号的信号线,不易受干扰的影响。
与放大器分离型相比,布线工时更少。
一般比放大器分离型大,但与没有灵敏度调整的类型相比,绝不逊色。
代表机型:E3Z、E3T、E3S-C(3)电源内置型连电源部也包含在投光器、受光器中的一体化产品。
特长可直接连接到商用电源上,此外还能从受光器直接进行容量较大的控制输出。
投光器、受光器中还包括了电源变压器等,所以与其他形态相比很大。